Изобретение относится к измерительной технике и предназначено для получения цифровой информации о трехпозиционном положении контролируемого объекта путем преобразования модулей комплексных сопротивлений или взаимной индуктивности параметрических первичных преобразователей положения в активный сигнал.
Известен датчик для измерения перемещения, содержащий блок, состоящий из двух независимых индуктивных (трансформаторных) первичных измерительных преобразователей, комплексное сопротивление (взаимная индуктивность) которых изменяется при перемещении контролируемого объекта, и вторичный измерительный преобразователь, первый и второй выходы которого соединены соответственно с первым и вторым входами блока первичных измерительных преобразователей, первый и второй выходы которого подсоединены соответственно к первому и второму входам вторичного измерительного преобразователя, имеющего первый и второй информационные выходы и содержащего источник переменного во времени сигнала, например гармонического или импульсного, первый и второй зажимы которого подключены к первому и второму выходам вторичного измерительного преобразователя соответственно, первый вход которого соединен с анодом (катодом) первого диода и катодом (анодом) второго диода, анод (катод) которого подсоединен к общей шине, к второму зажиму источника, к первым выводам первого и второго резисторов, к первым выводам первого и второго конденсаторов и к аноду (катоду) третьего диода, катод (анод) которого соединен со вторым входом вторичного измерительного преобразователя и анодом (катодом) четвертого диода, катод (анод) первого диода соединен с первым информационным выходом вторичного измерительного преобразователя и со вторыми выводами первых резистора и конденсатора, катод (анод) четвертого диода соединен со вторым информационным выходом вторичного измерительного преобразователя и со вторыми выводами вторых резистора и конденсатора [1].
Недостатком известного устройства, при использовании его в качестве датчика положения, является зависимость результата преобразования в электрический сигнал значения и изменения значения комплексного сопротивления первого (второго) из двух индуктивных первичных преобразователей перемещения или положения при изменении комплексного сопротивления второго (первого) первичного преобразователя при перемещении индуктора.
Известен датчик для измерения перемещения, содержащий блок, состоящий из двух независимых индуктивных (трансформаторных) первичных измерительных преобразователей, комплексное сопротивление (взаимная индуктивность) которых изменяется при перемещении контролируемого объекта, и вторичный измерительный преобразователь, первый и второй выходы которого соединены соответственно с первым и вторым входами блока первичных измерительных преобразователей, первый и второй выходы которого подсоединены соответственно к первому и второму входам вторичного измерительного преобразователя, имеющего первый и второй информационные выходы и содержащего источник переменного во времени сигнала, например гармонического или импульсного, первый и второй зажимы которого подключены к первому и второму выходам вторичного измерительного преобразователя соответственно, первый вход которого соединен с анодом (катодом) первого диода и катодом (анодом) второго диода, анод (катод) которого подсоединен к второму информационному выходу вторичного измерительного преобразователя и первому выводу второго конденсатора, второй вывод которого соединен с общей шиной, вторым зажимом источника и вторым выводом первого конденсатора, первый вывод которого подключен к первому информационному выходу вторичного измерительного преобразователя и аноду (катоду) третьего диода, катод (анод) которого подсоединен к второму входу вторичного измерительного преобразователя и аноду (катоду) четвертого диода, катоды (аноды) первого и четвертого диодов соединены соответственно с анодами (катодами) третьего и второго диодов [2].
Недостатком известного устройства, при использовании его в качестве датчика положения, является зависимость результата преобразования в электрический сигнал значения и изменения значения комплексного сопротивления первого (второго) из двух индуктивных первичных преобразователей перемещения или положения при изменении комплексного сопротивления второго (первого) первичного преобразователя при перемещении индуктора.
В основу данного изобретения положена задача получения цифровой информации о трехпозиционном положении контролируемого объекта с помощью двух независимых первичных преобразователей положения.
Указанная цель достигается тем, что в датчик для трехпозиционного контроля положения, содержащий блок, состоящий из двух независимых индуктивных (трансформаторных) первичных преобразователей положения, комплексное сопротивление (взаимная индуктивность) которых изменяется при перемещении контролируемого объекта, и вторичный преобразователь, первый и второй выходы которого соединены соответственно с первым и вторым входами блока первичных преобразователей, первый и второй выходы которого подсоединены соответственно к первому и второму входам вторичного преобразователя, имеющего первый и второй информационные выходы и содержащего источник переменного во времени сигнала, например гармонического или импульсного, первый и второй зажимы которого подключены к первому и второму выходам вторичного преобразователя соответственно, первый вход которого соединен с анодом (катодом) первого диода и катодом (анодом) второго диода, анод (катод) которого подключен к первому выводу второго резистора, к второму информационному выходу вторичного преобразователя и к первому выводу второго конденсатора, второй вывод которого соединен со вторым выводом второго резистора, со вторым выходом вторичного преобразователя, общей шиной, вторым выводом первого резистора и вторым выводом первого конденсатора, первый вывод которого подключен к первому выводу первого резистора, к первому информационному выходу вторичного преобразователя и к аноду (катоду) третьего диода, катод (анод) которого подсоединен к второму входу вторичного преобразователя и аноду (катоду) четвертого диода, введены два образцовых элемента, первый и второй выводы первого образцового элемента подключены соответственно к катоду (аноду) первого диода и к аноду (катоду) третьего диода, первый и второй выводы второго образцового элемента подключены соответственно к катоду (аноду) четвертого диода и к аноду (катоду) второго диода.
В данном устройстве предложено выполнение двух образцовых элементов так, что первым и вторым образцовым элементом являются резисторы (индуктивности).
Дополнительно в данном устройстве предложено выполнение двух образцовых элементов так, что первым и вторым образцовым элементом соответственно являются резистор (индуктивность) и индуктивность (резистор).
При различных вариантах исполнения образцовых элементов каждый из них обеспечивает получение опорного напряжения для противоположного, по отношению к своему, плеча вторичного преобразователя.
В данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых индуктивных первичных преобразователей положения, первые выводы которых подключены к первому входу блока, к первому и второму выходам которого подсоединены соответственно вторые выводы первого и второго независимых индуктивных первичных преобразователей положения.
В данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых трансформаторных первичных преобразователя положения, каждый из которых содержит первичную и вторичную обмотки, причем начала (концы) первичных обмоток первого и второго независимых трансформаторных первичных преобразователей положения подключены к второму входу блока первичных преобразователей положения, первый вход которого соединен с концами (началами) первичных обмоток первого и второго независимых первичных преобразователей положения, начало (конец) вторичной обмотки первого первичного преобразователя положения подключено к первому выходу блока первичных преобразователей положения, второй выход которого соединен с началом (концом) вторичной обмотки второго независимого первичного преобразователя положения, конец (начало) вторичной обмотки которого соединен с концом (началом) вторичной обмотки первого первичного преобразователя положения и вторым входом блока независимых первичных преобразователей положения.
Дополнительно в данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых трансформаторных первичных преобразователя положения, каждый из которых содержит первичную и вторичную обмотки, причем начало (конец) первичной обмотки первого и начало (конец) первичной обмотки второго независимых трансформаторных первичных преобразователей положения подключены к второму входу блока первичных преобразователей положения, первый вход которого соединен с концом (началом) первичной обмотки первого и концом (началом) первичной обмотки второго независимых первичных преобразователей положения, конец (начало) вторичной обмотки первого первичного преобразователя положения подключен к первому выходу блока первичных преобразователей положения, второй выход которого соединен с началом (концом) вторичной обмотки второго независимого первичного преобразователя положения, конец (начало) вторичной обмотки которого соединен с началом (концом) вторичной обмотки первого первичного преобразователя положения и вторым входом блока независимых первичных преобразователей положения.
Дополнительно в данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых трансформаторных первичных преобразователя положения, каждый из которых содержит первичную и вторичную обмотки, причем начало (конец) первичной обмотки первого и конец (начало) первичной обмотки второго независимых трансформаторных первичных преобразователей положения соединены между собой, конец (начало) первичной обмотки первого и начало (конец) первичной обмотки второго независимых трансформаторных первичных преобразователей положения подключены соответственно к первому и второму входам блока первичных преобразователей положения, к первому и второму выходам которого соответственно подключены начало (конец) вторичной обмотки первого и начало (конец) вторичной обмотки второго независимых трансформаторных первичных преобразователей положения, у которых концы (начала) вторичных обмоток соединены с вторым входом блока первичных преобразователей положения.
Дополнительно в данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых трансформаторных первичных преобразователя положения, каждый из которых содержит первичную и вторичную обмотки, причем начало (конец) первичной обмотки первого и конец (начало) первичной обмотки второго независимых трансформаторных первичных преобразователя положения соединены между собой, конец (начало) первичной обмотки первого и начало (конец) первичной обмотки второго независимых трансформаторных первичных преобразователя положения подключены соответственно к первому и второму входам блока первичных преобразователей положения, к первому и второму выходам которого соответственно подключены конец (начало) вторичной обмотки первого и начало (конец) вторичной обмотки второго независимых трансформаторных первичных преобразователей положения, у которых соответственно начало (конец) и конец (начало) вторичных обмоток соединены со вторым входом блока первичных преобразователей положения.
При различных вариантах исполнения два независимых индуктивных или трансформаторных первичных преобразователя положения посредством индуктора, связанного с контролируемым объектом, обеспечивают совместно с предложенным вторичным преобразователем получение информации о трех положениях контролируемого объекта.
Указанная цель достигается тем, что в датчик для трехпозиционного контроля положения, содержащий блок, состоящий из двух независимых индуктивных (трансформаторных) первичных преобразователей положения, комплексное сопротивление (взаимная индуктивность) которых изменяется при перемещении контролируемого объекта, и вторичный преобразователь, первый и второй выходы которого соединены соответственно с первым и вторым входами блока первичных преобразователей, первый и второй выходы которого подсоединены соответственно к первому и второму входам вторичного преобразователя, который содержит источник переменного во времени сигнала, например гармонического или импульсного, первый и второй зажимы которого подключены к первому и второму выходам вторичного преобразователя соответственно, первый вход которого соединен с анодом (катодом) первого диода и катодом (анодом) второго диода, анод (катод) которого подсоединен к первому выводу второго резистора, второй информационный выход вторичного преобразователя соединен с первым выводом второго конденсатора, второй вывод которого подключен к второму выводу второго резистора, к второму выходу вторичного преобразователя, к общей шине, к второму выводу первого резистора и к второму выводу первого конденсатора, первый вывод которого подсоединен к первому информационному выходу вторичного преобразователя и катоду (аноду) первого диода, первый вывод первого резистора соединен с анодом (катодом) третьего диода, катод (анод) которого подсоединен к второму входу вторичного преобразователя и аноду (катоду) четвертого диода, катод (анод) которого подключен к первому выводу второго конденсатора, введены два образцовых элемента, первый и второй выводы первого образцового элемента подключены соответственно к катоду (аноду) первого диода и к аноду (катоду) третьего диода, первый и второй выводы второго образцового элемента подключены соответственно к катоду (аноду) четвертого диода и к аноду (катоду) второго диода.
В данном устройстве предложено выполнение двух образцовых элементов так, что первым и вторым образцовым элементом являются резисторы (индуктивности).
Дополнительно в данном устройстве предложено выполнение двух образцовых элементов так, что первым и вторым образцовым элементом соответственно являются резистор (индуктивность) и индуктивность (резистор).
При различных вариантах исполнения образцовых элементов каждый из них обеспечивает получение опорного напряжения для противоположного, по отношению к своему, плеча вторичного преобразователя.
В данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых индуктивных первичных преобразователя положения, первые выводы которых подключены к первому входу блока, к первому и второму выходам которого подсоединены соответственно вторые выводы первого и второго независимых индуктивных первичных преобразователей положения.
В данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых трансформаторных первичных преобразователя положения, каждый из которых содержит первичную и вторичную обмотки, причем начала (концы) первичных обмоток первого и второго независимых трансформаторных первичных преобразователей положения подключены к второму входу блока первичных преобразователей положения, первый вход которого соединен с концами (началами) первичных обмоток первого и второго независимых первичных преобразователей положения, начало (конец) вторичной обмотки первого первичного преобразователя положения подключено к первому выходу блока первичных преобразователей положения, второй выход которого соединен с началом (концом) вторичной обмотки второго независимого первичного преобразователя положения, конец (начало) вторичной обмотки которого соединен с концом (началом) вторичной обмотки первого первичного преобразователя положения и вторым входом блока независимых первичных преобразователей положения.
Дополнительно в данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых трансформаторных первичных преобразователя положения, каждый из которых содержит первичную и вторичную обмотки, причем начало (конец) первичной обмотки первого и начало (конец) первичной обмотки второго независимых трансформаторных первичных преобразователей положения подключены к второму входу блока первичных преобразователей положения, первый вход которого соединен с концом (началом) первичной обмотки первого и концом (началом) первичной обмотки второго независимых первичных преобразователей положения, конец (начало) вторичной обмотки первого первичного преобразователя положения подключен к первому выходу блока первичных преобразователей положения, второй выход которого соединен с началом (концом) вторичной обмотки второго независимого первичного преобразователя положения, конец (начало) вторичной обмотки которого соединен с началом (концом) вторичной обмотки первого первичного преобразователя положения и вторым входом блока независимых первичных преобразователей положения.
Дополнительно в данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых трансформаторных первичных преобразователя положения, каждый из которых содержит первичную и вторичную обмотки, причем начало (конец) первичной обмотки первого и конец (начало) первичной обмотки второго независимых трансформаторных первичных преобразователей положения соединены между собой, конец (начало) первичной обмотки первого и начало (конец) первичной обмотки второго независимых трансформаторных первичных преобразователей положения подключены соответственно к первому и второму входам блока первичных преобразователей положения, к первому и второму выходам которого соответственно подключены начало (конец) вторичной обмотки первого и начало (конец) вторичной обмотки второго независимых трансформаторных первичных преобразователей положения, у которых концы (начала) вторичных обмоток соединены с вторым входом блока первичных преобразователей положения.
Дополнительно в данном устройстве предложено выполнение блока первичных преобразователей положения так, что блок содержит два независимых трансформаторных первичных преобразователя положения, каждый из которых содержит первичную и вторичную обмотки, причем начало (конец) первичной обмотки первого и конец (начало) первичной обмотки второго независимых трансформаторных первичных преобразователя положения соединены между собой, конец (начало) первичной обмотки первого и начало (конец) первичной обмотки второго независимых трансформаторных первичных преобразователя положения подключены соответственно к первому и второму входам блока первичных преобразователей положения, к первому и второму выходам которого соответственно подключены конец (начало) вторичной обмотки первого и начало (конец) вторичной обмотки второго независимых трансформаторных первичных преобразователей положения, у которых соответственно начало (конец) и конец (начало) вторичных обмоток соединены со вторым входом блока первичных преобразователей положения.
При различных вариантах исполнения два независимых индуктивных или трансформаторных первичных преобразователя положения посредством индуктора, связанного с контролируемым объектом, обеспечивают совместно с предложенным вторичным преобразователем получение информации о трех положениях контролируемого объекта.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что в настоящее время отсутствует аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа как наиболее близкого по совокупности признаков аналога позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения. Следовательно, заявленное изобретение соответствует требованию "новизна".
Для проверки соответствия заявленного изобретения требованию изобретательского уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, определенного заявителем, не выявлено преобразований для достижения технического результата, предусматриваемых как существенные признаки заявленного изобретения, в частности заявленным изобретением в качестве существенных признаков не предусматриваются следующие преобразования:
- дополнение известного средства какой-либо известной частью, присоединяемой к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно таких дополнений;
- замена какой-либо части известного средства другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такой замены;
- исключение какой-либо части средства с одновременным исключением обусловленной ее наличием функции и достижением при этом обычного для такого случая результата;
- увеличение количества однотипных элементов для усиления технического результата, обусловленного наличием в средстве именно таких элементов;
- выполнение известного средства или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создание средства, состоящего из известных частей, выбор которых и связь между ними осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого объекта и связей между ними.
Следовательно, заявляемое изобретение соответствует требованию "изобретательский уровень".
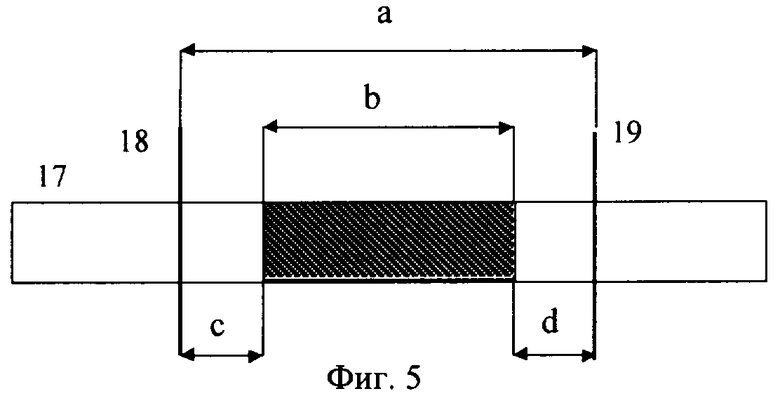
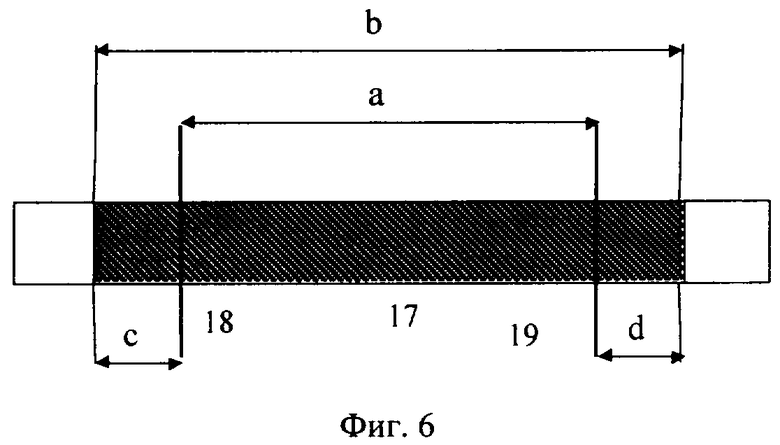
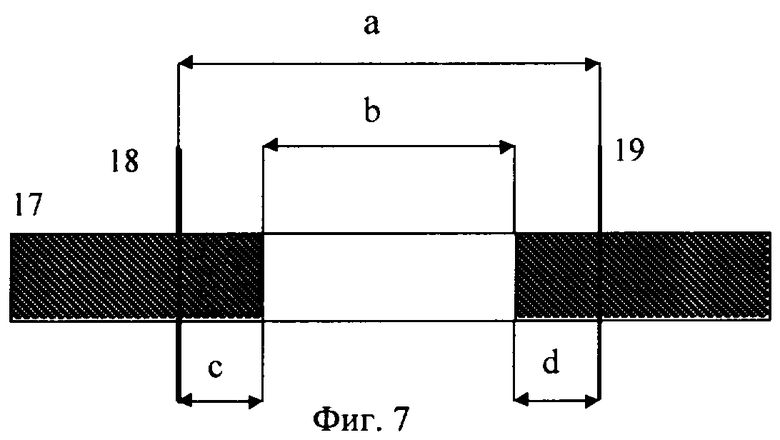
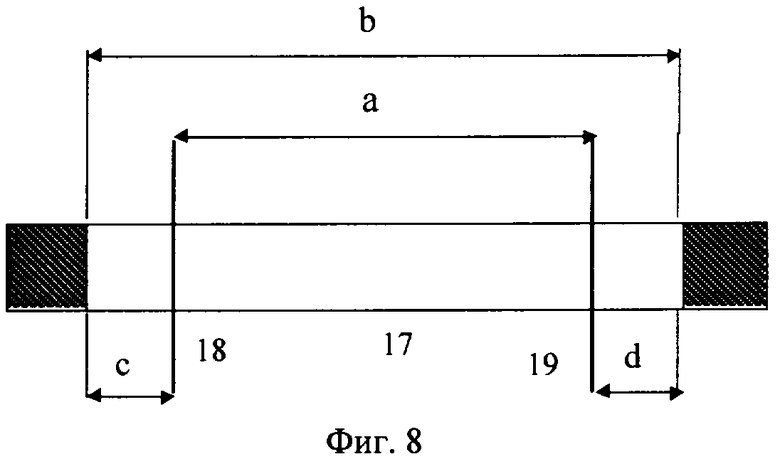
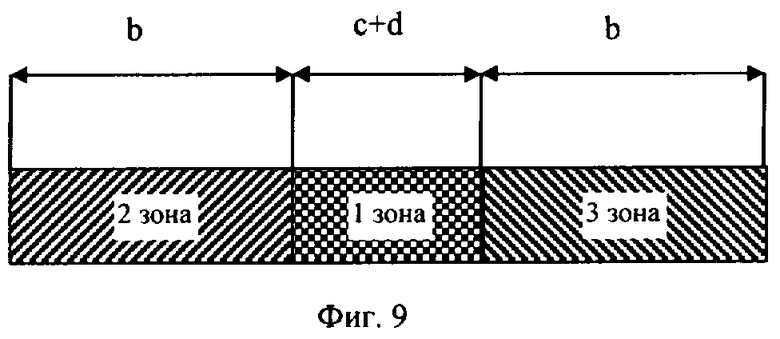
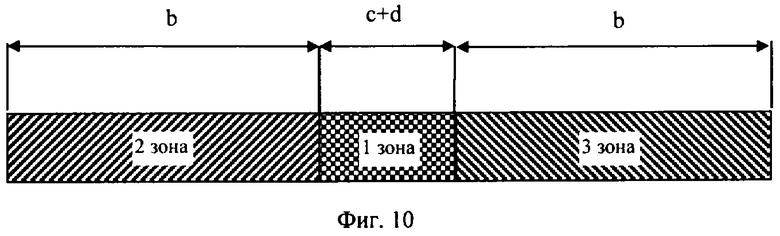
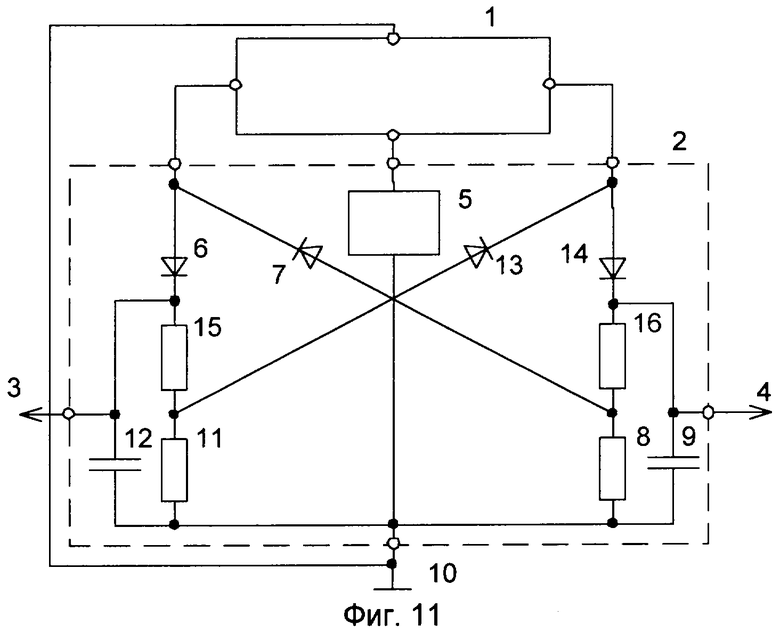
На фиг.1 приведен датчик для трехпозиционного контроля положения в объеме независимого пункта 1 формулы изобретения. На фиг.2, фиг.3 и фиг.4 раскрыты некоторые варианты блока первичных преобразователей положения. На фиг.5, фиг.6 (фиг.7, фиг.8) схематично изображены варианты расположения центрального магнитопроводящего (центрального немагнитопроводящего) участка индуктора (магнитопроводящий участок заштрихован), имеющего меньшую или большую длину "b" по сравнению с расстоянием "а" между первым и вторым первичными преобразователями положения. На фиг.9 и фиг.10 приведены соответственно по три зоны однозначного контроля положения. Отличие их заключается в том, что при сохранении длины внутренней зоны, равной "с+d" (см. фиг.5, фиг.6, фиг.7, фиг.8), длина "b" боковых зон на фиг.10 (что соответствует фиг.6, фиг.8) больше, чем на фиг.9 (что соответствует фиг.5, фиг.7), на величину "с+d". Таким образом, варьируя расстоянием "а" между первичными преобразователями, длиной "b" магнитопроводящего или немагнитопроводящего участка, "а-b=с+d" (фиг.5, фиг.7) или "b-а=с+d" (фиг.6, фиг.8), можно установить необходимые три зоны контроля положения. На фиг.11 приведен датчик для трехпозиционного контроля положения в объеме независимого пункта 9 формулы изобретения.
Сведения, подтверждающие возможность осуществления изобретения с получением вышеуказанного технического результата, заключаются в следующем.
Датчик для трехпозиционного контроля положения на фиг.1 содержит блок 1, состоящий из двух независимых индуктивных (трансформаторных) первичных преобразователей положения, комплексное сопротивление (взаимная индуктивность) которых изменяется при перемещении контролируемого объекта, и вторичный преобразователь 2, первый и второй выходы которого соединены соответственно с первым и вторым входами блока 1 первичных преобразователей, первый и второй выходы которого подсоединены соответственно к первому и второму входам вторичного преобразователя 2, имеющего первый 3 и второй 4 информационные выходы и содержащего источник 5 переменного во времени сигнала, например гармонического или импульсного, первый и второй зажимы которого подключены к первому и второму выходам вторичного преобразователя 2 соответственно, первый вход которого подсоединен к аноду (катоду) первого 6 диода и катоду (аноду) второго 7 диода, анод (катод) которого подключен к первому выводу второго 8 резистора, к второму 4 информационному выходу вторичного преобразователя 2 и к первому выводу второго 9 конденсатора, второй вывод которого соединен со вторым выводом второго 8 резистора, со вторым выходом вторичного преобразователя 2, общей шиной 10, вторым выводом первого 11 резистора и вторым выводом первого 12 конденсатора, первый вывод которого подключен к первому выводу первого 11 резистора, к первому 3 информационному выходу вторичного преобразователя и к аноду (катоду) третьего 13 диода, катод (анод) которого подсоединен к второму входу вторичного преобразователя 2 и аноду (катоду) четвертого 14 диода, первый и второй выводы первого 15 образцового элемента подключены соответственно к катоду (аноду) первого 6 диода и к аноду (катоду) третьего 13 диода, первый и второй выводы второго 16 образцового элемента подключены соответственно к катоду (аноду) четвертого 14 диода и к аноду (катоду) второго 7 диода.
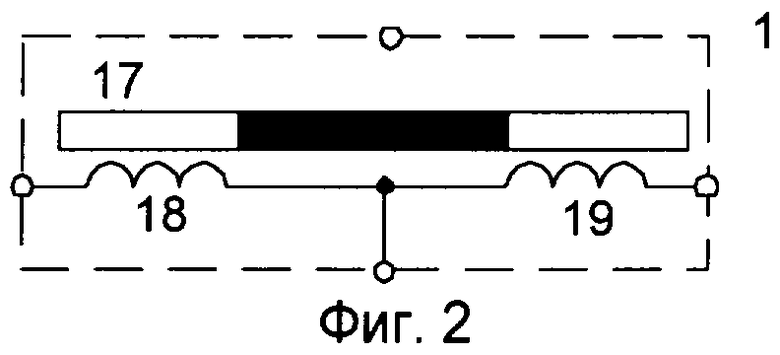
Блок первичных преобразователей положения 1 датчика на фиг.2 содержит индуктор 17, расположенный внутри или снаружи двух независимых индуктивных первичных преобразователей положения 18 и 19, первые выводы которых подключены к первому входу блока 1, к первому и второму выходам которого подсоединены соответственно вторые выводы первого 18 и второго 19 независимых индуктивных первичных преобразователей положения.
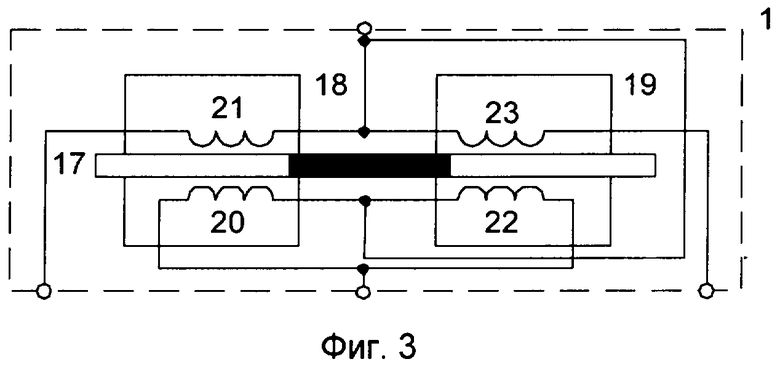
Блок первичных преобразователей положения 1 датчика на фиг.3 содержит индуктор 17, расположенный внутри или снаружи двух независимых трансформаторных первичных преобразователей положения 18 и 19, каждый из которых содержит первичную и вторичную обмотки 20, 21 и 22, 23, причем первые выводы первичных обмоток 20 и 22 первого 18 и второго 19 независимых трансформаторных первичных преобразователей положения подключены к первому входу блока первичных преобразователей 1, второй вход которого соединен со вторыми выводами первичных обмоток 20 и 22 первого 18 и второго 19 независимых первичных преобразователей, первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения подключен к первому выходу блока первичных преобразователей 1, второй выход которого соединен с первым выводом вторичной обмотки 23 второго 19 независимого первичного преобразователя, второй вывод вторичной обмотки 23 которого соединен со вторым выводом вторичной обмотки 21 первого 18 первичного преобразователя положения и вторым входом блока независимых первичных преобразователей положения 1.
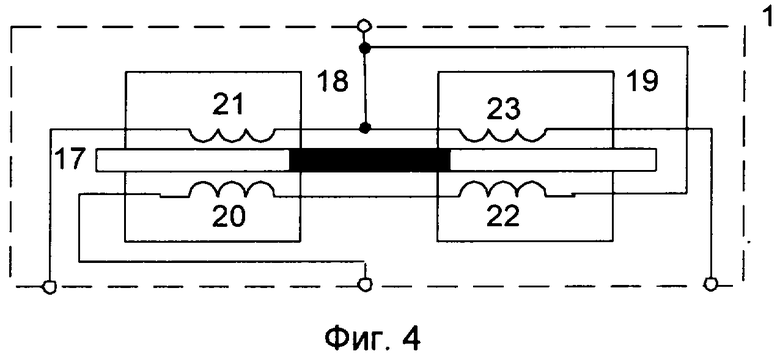
Блок первичных преобразователей положения 1 датчика на фиг.4 содержит индуктор 17, расположенный внутри или снаружи двух независимых трансформаторных первичных преобразователей положения 18 и 19, каждый из которых содержит первичную и вторичную обмотки 20, 21 и 22, 23, причем первый вывод первичной обмотки 20 первого 18 и второй вывод первичной обмотки 22 второго 19 независимых трансформаторных первичных преобразователей положения соединены между собой, второй вывод первичной обмотки 20 первого 18 и первый вывод первичной обмотки 22 второго 19 независимых трансформаторных первичных преобразователей положения подключены соответственно к первому и второму входам блока первичных преобразователей 1, к первому и второму выходам которого соответственно подключены первые выводы вторичных обмоток 21 и 23 первого 18 и второго 19 независимых трансформаторных первичных преобразователей положения, у которых вторые выводы вторичных обмоток 21 и 23 соединены со вторым входом блока первичных преобразователей положения 1.
Датчик для трехпозиционного контроля положения на фиг.11 содержит блок 1, состоящий из двух независимых индуктивных (трансформаторных) первичных преобразователей положения, комплексное сопротивление (взаимная индуктивность) которых изменяется при перемещении контролируемого объекта, и вторичный преобразователь 2, первый и второй выходы которого соединены соответственно с первым и вторым входами блока 1 первичных преобразователей, первый и второй выходы которого подсоединены соответственно к первому и второму входам вторичного преобразователя 2, имеющего первый 3 и второй 4 информационные выходы и содержащего источник 5 переменного во времени сигнала, например гармонического или импульсного, первый и второй зажимы которого подключены к первому и второму выходам вторичного преобразователя 2 соответственно, первый вход которого подсоединен к аноду (катоду) первого 6 диода и катоду (аноду) второго 7 диода, анод (катод) которого подсоединен к первому выводу второго 8 резистора, второй 4 информационный выход вторичного преобразователя 2 соединен с первым выводом второго 9 конденсатора, второй вывод которого подключен к второму выводу второго 8 резистора, к второму выходу вторичного преобразователя 2, к общей шине 10, к второму выводу первого 11 резистора и к второму выводу первого 12 конденсатора, первый вывод которого подсоединен к первому 3 информационному выходу вторичного преобразователя 2 и катоду (аноду) первого 6 диода, первый вывод первого 11 резистора соединен с анодом (катодом) третьего 13 диода, катод (анод) которого подсоединен к второму входу вторичного преобразователя 2 и аноду (катоду) четвертого 14 диода, катод (анод) которого подключен к первому выводу второго 9 конденсатора, первый и второй выводы первого 15 образцового элемента подключены соответственно к катоду (аноду) первого 6 диода и к аноду (катоду) третьего 13 диода, первый и второй выводы второго 16 образцового элемента подключены соответственно к катоду (аноду) четвертого 14 диода и к аноду (катоду) второго 7 диода.
Вторичный преобразователь на фиг.1 с блоком первичных преобразователей на фиг.2 работает следующим образом.
При подаче с выхода источника 5 переменного во времени сигнала в положительный полупериод ток протекает по следующим цепям: первая - первый зажим источника 5, обмотка 18 первого первичного преобразователя положения, диод 6, элемент 15, параллельно соединенные резистор 11 и конденсатор 12, общая шина 10, второй зажим источника 5; вторая - первый зажим источника 5, обмотка 19 первого первичного преобразователя положения, диод 14, элемент 16, параллельно соединенные резистор 8 и конденсатор 9, общая шина 10, второй зажим источника 5. В отрицательный полупериод ток протекает по следующим цепям: первой - второй зажим источника 5, общая шина 10, параллельно соединенные резистор 11 и конденсатор 12, диод 13, обмотка 19 первого первичного преобразователя положения, первый зажим источника 5; второй - второй зажим источника 5, общая шина 10, параллельно соединенные резистор 8 и конденсатор 9, диод 7, обмотка 18 первого первичного преобразователя положения, первый зажим источника 5. На конденсаторах 12 и 9 соответственно формируются напряжения V1, V2 относительно общей шины 10. Значения и полярность этих напряжений зависят от положения магнитопроводящего участка индуктора 17, расположенного с внутренней или с внешней стороны первичных преобразователей положения 18 и 19. Пусть в исходном состоянии, как это показано на фиг.5 (фиг.6, фиг.7, фиг.8), комплексное сопротивление первичного преобразователя 18 положения примерно равно комплексному сопротивлению первичного преобразователя 19 положения, так как немагнитопроводящий (магнитопроводящий, магнитопроводящий, немагнитопроводящий) участок индуктора 17 находится в зоне первичных преобразователей 18 и 19. Это приводит к тому, что на первом информационном выходе 3 вторичного преобразователя V1<0 (V1<0, V1<0, V1<0) и на втором информационном выходе 4 вторичного преобразователя V2<0 (V2<0, V2<0, V2<0). При перемещении индуктора 17 на фиг.5 влево (на фиг.6 вправо, на фиг.7 вправо, на фиг.8 влево) в зону первичного преобразователя 18 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, комплексное сопротивление первичного преобразователя 18 резко увеличивается (уменьшается, уменьшается, увеличивается), тогда как комплексное сопротивление первичного преобразователя 19 не изменяется, а это значит, что изменяются значение и полярность VI и V2, т.е. на первом информационном выходе 3 вторичного преобразователя V1<0 (V1>0, V1>0, V1<0) и на втором информационном выходе 4 вторичного преобразователя V2>0 (V2<0, V2<0, V2>0). При перемещении индуктора 17 на фиг.5 вправо (на фиг.6 влево, на фиг.7 влево, на фиг.8 вправо) в зоне первичного преобразователя 19 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, комплексное сопротивление первичного преобразователя 19 резко увеличивается (уменьшается, уменьшается, увеличивается), тогда как комплексное сопротивление первичного преобразователя 18 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом информационном выходе 3 вторичного преобразователя V1>0 (V1<0, V1<0, V1>0) и на втором информационном выходе 4 вторичного преобразователя V2<0 (V2>0, V2>0, V2<0).
Вторичный преобразователь на фиг.1 с встречно включенными вторичными обмотками блока первичных преобразователей на фиг.3 работает следующим образом.
При подаче с выхода источника 5 гармонического или импульсного сигнала в положительный полупериод ток протекает по цепям: первая - первый зажим источника 5, первичная обмотка 20 первого 18 первичного преобразователя положения, общая шина 10, второй зажим источника 5; вторая - первый зажим источника 5, первичная обмотка 22 второго 19 первичного преобразователя положения, общая шина 10, второй зажим источника 5; третья - первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, диод 6, элемент 15, параллельно соединенные резистор 11 и конденсатор 12, общая шина 10, второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения; четвертая - первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, диод 14, элемент 16, параллельно соединенные резистор 8 и конденсатор 9, общая шина 10, второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения. В отрицательный полупериод ток протекает по следующим цепям: первая - второй зажим источника 5, общая шина 10, первичная обмотка 20 первого 18 первичного преобразователя положения, первый зажим источника 5; вторая - второй зажим источника 5, общая шина 10, первичная обмотка 22 первого 19 первичного преобразователя положения, первый зажим источника 5; третья - второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, общая шина 10, параллельно соединение резистор 8 и конденсатор 9, диод 7, первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения; четвертая - второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, общая шина 10, параллельно соединеные резистор 11 и конденсатор 12, диод 13, первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения. На конденсаторах 12 и 9 соответственно формируются напряжения V1, V2 относительно общей шины 10. Значение и полярность этих напряжений зависит от положения магнитопроводящего участка индуктора 17, расположенного с внутренней или с внешней стороны первичных преобразователей положения 18 и 19. Пусть в исходном состоянии, как это показано на фиг.5 (фиг.6, фиг.7, фиг.8), минимальна (максимальна, максимальна, минимальна) взаимная индуктивность первого 18 и второго 19 первичных преобразователей положения, так как немагнитопроводящий (магнитопроводящий, магнитопроводящий, немагнитопроводящий) участок индуктора 17 находится в зоне первичных преобразователей 18 и 19. Это приводит к тому, что на первом информационном выходе 3 вторичного преобразователя V1<0 (V1<0, V1<0, V1<0) и на втором информационном выходе 4 вторичного преобразователя V2<0 (V2<0, V2<0, V2<0). При перемещении индуктора 17 на фиг.5 влево (на фиг.6 вправо, на фиг.7 вправо, на фиг.8 влево) в зону первичного преобразователя 18 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, взаимная индуктивность первичного преобразователя 18 увеличивается (уменьшается, уменьшается, увеличивается), тогда как состояние первичного преобразователя 19 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом информационном выходе 3 вторичного преобразователя V1>0 (V1<0, V1<0, V1>0) и на втором информационном выходе 4 вторичного преобразователя V2<0 (V2>0, V2>0, V2<0). При перемещении индуктора 17 на фиг.5 вправо (на фиг.6 влево, на фиг.7 влево, на фиг.8 вправо) в зону первичного преобразователя 19 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, взаимная индуктивность первичного преобразователя 19 увеличивается (уменьшается, уменьшается, увеличивается), тогда как состояние первичного преобразователя 18 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом информационном выходе 3 вторичного преобразователя V1<0 (V1>0, V1>0, V1<0) и на втором информационном выходе 4 вторичного преобразователя V2>0 (V2<0, V2<0, V2>0).
Вторичный преобразователь на фиг.1 с согласно включеными вторичными обмотками блока первичных преобразователей на фиг.3 работает следующим образом.
При подаче с выхода источника 5 гармонического или импульсного сигнала в положительный полупериод ток протекает по цепям: первая - первый зажим источника 5, первичная обмотка 20 первого 18 первичного преобразователя положения, общая шина 10, второй зажим источника 5; вторая - первый зажим источника 5, первичная обмотка 22 второго 19 первичного преобразователя положения, общая шина 10, второй зажим источника 5; третья - первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, диод 6, элемент 15, параллельно соединеные резистор 11 и конденсатор 12, общая шина 10, второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения; четвертая - первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, общая шина 10, параллельно соединеные резистор 11 и конденсатор 12, диод 13, второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения; пятая - первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, диод 6, элемент 15, диод 13, второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения. В отрицательный полупериод ток протекает по следующим цепям: первая - второй зажим источника 5, общая шина 10, первичная обмотка 20 первого 18 первичного преобразователя положения, первый зажим источника 5; вторая - второй зажим источника 5, общая шина 10, первичная обмотка 22 второго 19 первичного преобразователя положения, первый зажим источника 5; третья - второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, общая шина 10, параллельно соединеные резистор 8 и конденсатор 9, диод 7, первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения; четвертая - второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, диод 14, элемент 16, параллельно соединенные резистор 8 и конденсатор 9, общая шина 10, первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения; пятая - второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, диод 14, элемент 16, диод 7, первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения. На конденсаторах 12 и 9 соответственно формируются напряжения V1, V2 относительно общей шины 10. Значение и полярность этих напряжений зависят от положения магнитопроводящего участка индуктора 17, расположенного с внутренней или с внешней стороны первичных преобразователей положения 18 и 19. Пусть в исходном состоянии, как это показано на фиг.5 (фиг.6, фиг.7, фиг.8), минимальны (максимальны, максимальны, минимальны) взаимные индуктивности первого 18 и второго 19 первичных преобразователей положения, так как немагнитопроводящий (магнитопроводящий, магнитопроводящий, немагнитопроводящий) участок индуктора 17 находится в зоне первичных преобразователей 18 и 19. Это приводит к тому, что на первом информационном выходе 3 вторичного преобразователя V1<0 (V1<0, V1<0, V1<0) и на втором информационном выходе 4 вторичного преобразователя V2<0 (V2<0, V2<0, V2<0). При перемещении индуктора 17 на фиг.5 влево (на фиг.6 вправо, на фиг.7 вправо, на фиг.8 влево) в зону первичного преобразователя 18 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 19, взаимная индуктивность первичного преобразователя 18 увеличивается (уменьшается, уменьшается, увеличивается), тогда как состояние первичного преобразователя 19 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом информационном выходе 3 вторичного преобразователя V1>0 (V1<0, V1<0, V1>0) и на втором информационном выходе 4 вторичного преобразователя V2<0 (V2>0, V2>0, V2<0). При перемещении индуктора 17 на фиг.5 вправо (на фиг.6 влево, на фиг.7 влево, на фиг.8 вправо) в зону первичного преобразователя 19 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, индуктивная связь в первичном преобразователе 19 увеличивается (уменьшается, уменьшается, увеличивается), тогда как состояние первичного преобразователя 18 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом информационном выходе 3 вторичного преобразователя V1<0 (V1>0, V1>0, V1<0) и на втором информационном выходе 4 вторичного преобразователя V2>0 (V2<0, V2<0, V2>0).
Вторичный преобразователь на фиг.1 с встречно включенными вторичными обмотками блока первичных преобразователей на фиг.4 работает следующим образом.
При подаче с выхода источника 5 гармонического или импульсного сигнала в положительный полупериод ток протекает по цепям: первая - первый зажим источника 5, первичная обмотка 20 первого 18 первичного преобразователя положения, первичная обмотка 22 второго 19 первичного преобразователя положения, общая шина 10, второй зажим источника 5; вторая - первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, диод 6, элемент 15, параллельно соединеные резистор 11 и конденсатор 12, общая шина 10, второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения; третья - первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, диод 14, элемент 16, параллельно соединенные резистор 8 и конденсатор 9, общая шина 10, второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения. В отрицательный полупериод ток протекает по следующим цепям: первая - второй зажим источника 5, общая шина 10, первичная обмотка 22 второго 19 первичного преобразователя положения, первичная обмотка 20 первого 18 первичного преобразователя положения, первый зажим источника 5; вторая - второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, общая шина 10, параллельно соединенные резистор 8 и конденсатор 9, диод 7, первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения; третья - второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, общая шина 10, параллельнно соединенные резистор 11 и конденсатор 12, диод 13, первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения. На конденсаторах 12 и 9 соответственно формируются напряжения V1 и V2 относительно общей шины 10. Значение и полярность этих напряжений зависят от положения магнитопроводящего участка индуктора 17, расположенного с внутренней или с внешней стороны первичных преобразователей положения 18 и 19. Пусть в исходном состоянии, как это показано на фиг.5 (фиг.6, фиг.7, фиг.8), минимальны (максимальны, максимальны, минимальны) взаимные индуктивности первого 18 и второго 19 первичных преобразователей положения, так как немагнитопроводящий (магнитопроводящий, магнитопроводящий, немагнитопроводящий) участок индуктора 17 находится в зоне первичных преобразователей 18 и 19. Это приводит к тому, что на первом информационном выходе 3 вторичного преобразователя V1<0 (V1<0, V1<0, V1<0) и на втором информационном выходе 4 вторичного преобразователя V2<0 (V2<0, V2<0, V2<0). При перемещении индуктора 17 на фиг.5 влево (на фиг.6 вправо, на фиг.7 вправо, на фиг.8 влево) в зону первичного преобразователя 18 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, взаимная индуктивность первичного преобразователя 18 увеличивается (уменьшается, уменьшается, увеличивается), тогда как состояние первичного преобразователя 19 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом 3 информационном выходе вторичного преобразователя V1>0 (V1<0, V1<0, V1>0) и на втором 4 информационном выходе вторичного преобразователя V2<0 (V2>0, V2>0, V2<0). При перемещении индуктора 17 на фиг.5 вправо (на фиг.6 влево, на фиг.7 влево, на фиг.8 вправо) в зону первичного преобразователя 19 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, индуктивная связь в первичном преобразователе 19 увеличивается (уменьшается, уменьшается, увеличивается), тогда как состояние первичного преобразователя 18 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом 3 информационном выходе вторичного преобразователя V1<0 (V1>0, V1>0, V1<0) и на втором 4 информационном выходе вторичного преобразователя V2>0 (V2<0, V2<0, V2>0).
Вторичный преобразователь на фиг.1 при согласном включении вторичных обмоток блока первичных преобразователей на фиг.4 работает следующим образом.
При подаче с выхода источника 5 гармонического или импульсного сигнала в положительный полупериод ток протекает по цепям: первая - первый зажим источника 5, первичная обмотка 20 первого 18 первичного преобразователя положения, первичная обмотка 22 второго 19 первичного преобразователя положения, общая шина 10, второй зажим источника 5; вторая - первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, диод 6, элемент 15, параллельно соединенные резистор 11 и конденсатор 12, общая шина 10, второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения; третья - первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, общая шина 10, параллельно соединенные резистор 11 и конденсатор 12, диод 13, второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения; четвертая - первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, диод 6, элемент 15, диод 13, второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения. В отрицательный полупериод ток протекает по следующим цепям: первая - второй зажим источника 5, общая шина 10, первичная обмотка 22 второго 19 первичного преобразователя положения, первичная обмотка 20 первого 18 первичного преобразователя положения, первый зажим источника 5; вторая - второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, общая шина 10, параллельно соединенные резистор 8 и конденсатор 9, диод 7, первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения; третья - второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, диод 14, элемент 16, параллельнно соединенные резистор 8 и конденсатор 9, общая шина 10, первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения; четвертая - второй вывод вторичной обмотки 23 второго 19 первичного преобразователя положения, диод 14, элемент 16, диод 7, первый вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, второй вывод вторичной обмотки 21 первого 18 первичного преобразователя положения, первый вывод вторичной обмотки 23 второго 19 первичного преобразователя положения. На конденсаторах 12 и 9 соответственно формируются напряжения V1 и V2 относительно общей шины 10. Значение и полярность этих напряжений зависят от положения магнитопроводящего участка индуктора 17, расположенного с внутренней или с внешней стороны первичных преобразователей положения 18 и 19. Пусть в исходном состоянии, как это показано на фиг.5 (фиг.6, фиг.7, фиг.8), минимальна (максимальна, максимальна, минимальна) индуктивная связь между первичными и вторичными обмотками первого 18 и второго 19 первичных преобразователей положения, так как немагнитопроводящий (магнитопроводящий, магнитопроводящий, немагнитопроводящий) участок индуктора 17 находится в зоне первичных преобразователей 18 и 19. Это приводит к тому, что на первом 3 информационном выходе вторичного преобразователя V1<0 (V1<0, V1<0, V1<0) и на втором 4 информационном выходе вторичного преобразователя V2<0 (V2<0, V2<0, V2<0). При перемещении индуктора 17 на фиг.5 влево (на фиг.6 вправо, на фиг.7 вправо, на фиг.8 влево) в зону первичного преобразователя 18 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, индуктивная связь в первичном преобразователе 18 увеличивается (уменьшается, уменьшается, увеличивается), тогда как состояние первичного преобразователя 19 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом 3 информационном выходе вторичного преобразователя V1>0 (V1<0, V1<0, V1>0) и на втором 4 информационном выходе вторичного преобразователя V2<0 (V2>0, V2>0, V2<0). При перемещении индуктора 17 на фиг.5 вправо (на фиг.6 влево, на фиг.7 влево, на фиг.8 вправо) в зону первичного преобразователя 19 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, индуктивная связь в первичном преобразователе 19 увеличивается (уменьшается, уменьшается, увеличивается), тогда как состояние первичного преобразователя 18 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом информационном 3 выходе вторичного преобразователя V1<0 (V1>0, V1>0, V1<0) и на втором информационном 4 выходе вторичного преобразователя V2>0 (V2<0, V2<0, V2>0).
Вторичный преобразователь на фиг.11 с блоком первичных преобразователей на фиг.2 работает следующим образом.
При подаче с выхода источника 5 переменного во времени сигнала в положительный полупериод ток протекает по следующим цепям: первая - первый зажим источника 5, обмотка 18 первого первичного преобразователя положения, диод 6, элемент 15, резистор 11, общая шина 10, второй зажим источника 5; вторая - первый зажим источника 5, обмотка 18 первого первичного преобразователя положения, диод 6, конденсатор 12, общая шина 10, второй зажим источника 5; третья - первый зажим источника 5, обмотка 19 первого первичного преобразователя положения, диод 14, элемент 16, резистор 8, общая шина 10, второй зажим источника 5; четвертая - первый зажим источника 5, обмотка 19 первого первичного преобразователя положения, диод 14, конденсатор 9, общая шина 10, второй зажим источника 5. В отрицательный полупериод ток протекает по следующим цепям: первой - второй зажим источника 5, общая шина 10, резистор 11, диод 13, обмотка 19 второго первичного преобразователя положения, первый зажим источника 5; второй - второй зажим источника 5, общая шина 10, конденсатор 12, элемент 15, диод 13, обмотка 19 второго первичного преобразователя положения, первый зажим источника 5; третья - второй зажим источника 5, общая шина 10, резистор 8, диод 7, обмотка 18 первого первичного преобразователя положения, первый зажим источника 5; четвертая - второй зажим источника 5, общая шина 10, конденсатор 9, элемент 16, диод 7, обмотка 18 первого первичного преобразователя положения, первый зажим источника 5. На конденсаторах 12 и 9 соответственно формируются напряжения V1, V2 относительно общей шины 10. Значение и полярность этих напряжений зависят от положения магнитопроводящего участка индуктора 17, расположенного с внутренней или с внешней стороны первичных преобразователей положения 18 и 19. Пусть в исходном состоянии, как это показано на фиг.5 (фиг.6, фиг.7, фиг.8), комплексное сопротивление первичного преобразователя 18 положения примерно равно комплексному сопротивлению первичного преобразователя 19 положения, так как немагнитопроводящий (магнитопроводящий, магнитопроводящий, немагнитопроводящий) участок индуктора 17 находится в зоне первичных преобразователей 18 и 19. Это приводит к тому, что на первом информационном выходе 3 вторичного преобразователя V1>0 (V1<0, V1<0, V1>0) и на втором информационном выходе 4 вторичного преобразователя V2>0 (V2<0, V2<0, V2>0). При перемещении индуктора 17 на фиг.5 влево (на фиг.6 вправо, на фиг.7 вправо, на фиг.8 влево) в зону первичного преобразователя 18 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, комплексное сопротивление первичного преобразователя 18 резко увеличивается (уменьшается, уменьшается, увеличивается), тогда как комплексное сопротивление первичного преобразователя 19 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом информационном выходе 3 вторичного преобразователя V1<0 (V1>0, V1>0, V1<0) и на втором информационном выходе 4 вторичного преобразователя V2>0 (V2<0, V2<0, V2>0). При перемещении индуктора 17 на фиг.5 вправо (на фиг.6 влево, на фиг.7 влево, на фиг.8 вправо) в зону первичного преобразователя 19 подводится магнитопроводящий (немагнитопроводящий, немагнитопроводящий, магнитопроводящий) участок индуктора 17, комплексное сопротивление первичного преобразователя 19 резко увеличивается (уменьшается, уменьшается, увеличивается), тогда как комплексное сопротивление первичного преобразователя 18 не изменяется, а это значит, что изменяются значение и полярность V1 и V2, т.е. на первом информационном выходе 3 вторичного преобразователя V1>0 (V1<0, V1<0, V1>0) и на втором информационном выходе 4 вторичного преобразователя V2<0 (V2>0, V2>0, V2<0).
Все варианты блока первичных преобразователей для базовой схемы вторичного преобразователя на фиг.1 подключаются к аналогичным выводам для базовой схемы вторичного преобразователя на фиг.11.
При всех вариантах исполнения блока первичных преобразователей положения в данном датчике существует взаимосвязь каналов, когда изменение комплексного сопротивления одного из первичных преобразователей влияет на значения напряжений с выходов вторичного преобразователя. Этот эффект усиливается, если в качестве источника переменного во времени сигнала использовать источник тока. При этом в данном преобразователе знаки выходных напряжений, являющиеся информативным параметром, не изменяются.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- средство, выполняющее заявленное изобретение при его осуществлении, предназначено для использования в промышленности, а именно в измерительной технике;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимых пунктах формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить достижение положительного технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость".
Источники информации
1. Патент США №3688190, НКл 324/61R, МКл G 01 R 27/26, 29 августа 1972.
2. Патент США №3883812, НКл 329/166, МКл H 03 D 1/10, 13 мая 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДЛЯ ТРЕХПОЗИЦИОННОГО КОНТРОЛЯ ПОЛОЖЕНИЯ | 2003 |
|
RU2262657C2 |
| ДАТЧИК ДЛЯ ТРЕХПОЗИЦИОННОГО КОНТРОЛЯ ПОЛОЖЕНИЯ | 2003 |
|
RU2248580C2 |
| ДАТЧИК ДЛЯ ПЯТИПОЗИЦИОННОГО КОНТРОЛЯ ПОЛОЖЕНИЯ | 2003 |
|
RU2248581C2 |
| ДАТЧИК ДЛЯ МНОГОПОЗИЦИОННОГО КОНТРОЛЯ ПОЛОЖЕНИЯ | 2003 |
|
RU2248579C2 |
| Устройство для бесконтактной передачи информации об усилиях нагружения на позвоночник | 1988 |
|
SU1560173A1 |
| Устройство для преобразования абсолютного изменения модуля комплексного сопротивления в активный сигнал | 1983 |
|
SU1095098A1 |
| Трансформаторный обратноходовой преобразователь постоянного напряжения с пассивным клампированием | 2024 |
|
RU2823796C1 |
| Трансформаторный широкодиапазонный обратноходовой преобразователь постоянного напряжения с пассивным клампированием | 2024 |
|
RU2822283C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2007010C1 |
| ОБРАТНОХОДОВОЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ (ВАРИАНТЫ) | 2018 |
|
RU2681648C1 |
Изобретение относится к области приборостроения, в частности к технике трехпозиционного контроля перемещения объектов различной физической природы. Технический результат - расширение функциональных возможностей. Для достижения данного результата в предлагаемые варианты реализации датчика дополнительно введены два образцовых элемента. При этом в зависимости от схемы подключения образцовых элементов приведены варианты схемотехники их включения в измерительную цепь идентификации положения контролируемого объекта. Так, в первом варианте первый и второй выводы первого образцового элемента подключены соответственно к катоду (аноду) первого диода и к аноду (катоду) третьего диода, первый и второй выводы второго образцового элемента подключены соответственно к катоду (аноду) четвертого диода и к аноду (катоду) второго диода. 2 н. и 14 з.п. ф-лы, 11 ил.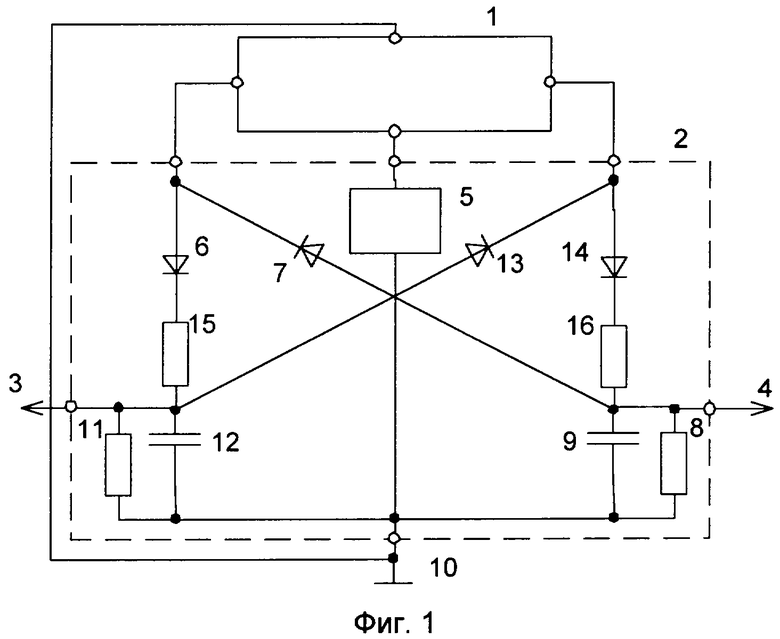
| US 3688190 А, 29.08.1972 | |||
| US 3883812 А, 13.05.1975 | |||
| Устройство для управления многопозиционным объектом | 1989 |
|
SU1734074A1 |
| Зверев Е.А | |||
| и др | |||
| Преобразование угловых перемещений в код | |||
| - Л.: Энергия, 1974, с.147 | |||
| Ботуз С.П | |||
| Позиционные системы программного управления подвижными объектами | |||
| - М.: ИПРЖ "Радиотехника", 1998, с.28 | |||
| Ботуз С.П | |||
| Автоматизация исследования, разработки и патентования | |||

