1
CJ
Јь
о VJ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления топливораздаточными колонками | 1982 |
|
SU1067472A1 |
| Устройство управления станком для вырезки фигурных стекол | 1988 |
|
SU1662958A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1052554A1 |
| Расточная головка с автоматическим управлением размером обработки | 1987 |
|
SU1657281A1 |
| Устройство резьбонарезания | 1987 |
|
SU1425003A1 |
| Многоканальное устройство ввода информации | 1985 |
|
SU1273936A2 |
| Телеметрическое устройство | 1979 |
|
SU858061A1 |
| Устройство для поиска информации,записанной на диске | 1977 |
|
SU929021A3 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
Изобретение относится к автоматическому управлению и может быть использовано в системах управления металлорежущими станками для автоматического поворота заготовки. Цель изобретения - повышение надежности и упрощение конструкции. Устройство содержит два индуктивных датчика 5 и 6 определения четных и нечетных позиций обработки, а также реле 8 тока, установленное в одной из фаз электродвигателя 4, источник 10 питания, блок 11 задания программ, два усилительных блока 12 и 13 с взаимной блокировкой, счетчик 14, четыре элемента И 15-18 и элементы 1/1 19-28 по числу позиций обработки, пять элементов ИЛИ 29-33, импульсный элемент 34, два временных элемента 35 и 36, два элемента 37 и 38 памяти, датчик 39 верхнего положения пиноли. При этом элемент 37 памяти состоит из двух элементов ИЛИ-НЕ 40 и 41, а элемент 38 памяти состоит из датчиков ИЛИ-НЕ 42 и 43. Блок 11 задания программ включает три элемента ИЛИ, переключатель, два элемента задержки, два формирователя импульса, тумблеры и светодиод 6. ел с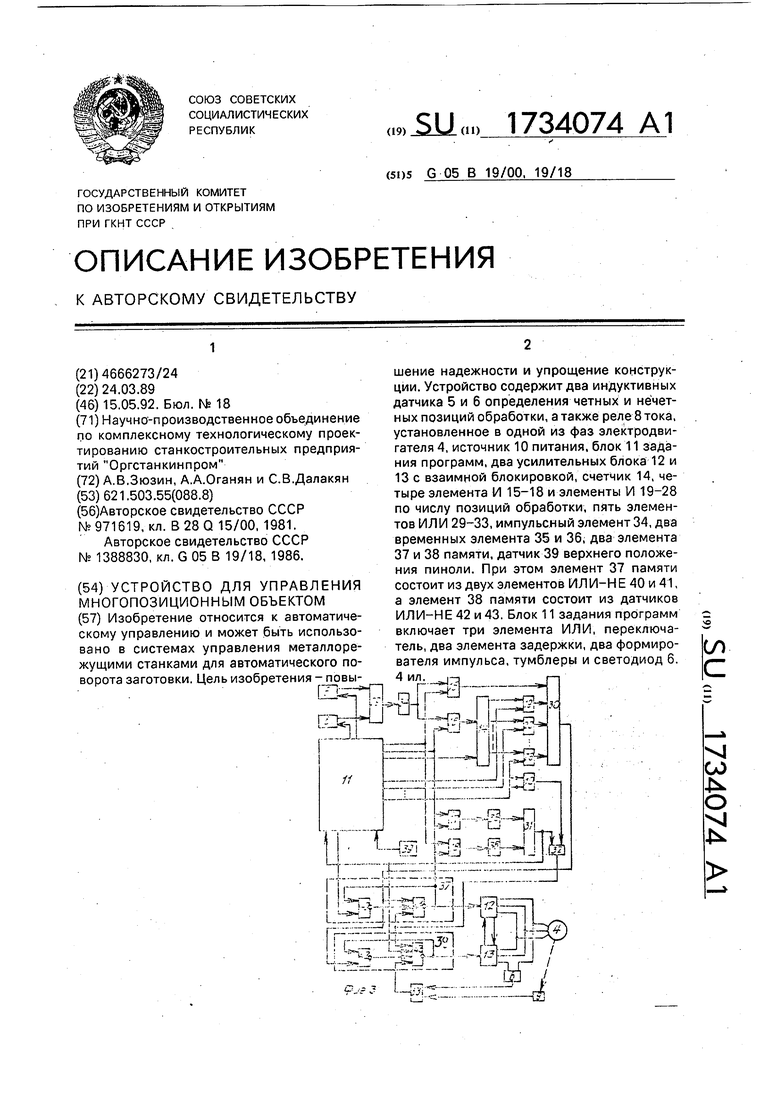
-
.--J
4-SL:S3:.:
Ј,; J
-
Изобретение относится к автоматическому управлению и может быть использовано в системах управления металлорежущими станками для автоматического поворота заготовки.
Известна система автоматического управления положением детали во вращающемся поворотном патроне, установленном в корпусе шпиндельной бабки станка, включающая датчик положения детали, закрепленной в патроне, автосинхронный генератор, в пассивную часть которого, состоящий из катушки индуктивности и блока конденсаторов, включен датчик положения детали, причем блок конденсаторов установлен в патроне, а катушка индуктивности пассивной части закреплена на торце патрона, обращенном к корпусу шпиндельной бабки, на котором соосно с вышеупомянутой катушкой закреплена катушка индуктивности активной части генератора.
Наиболее близкой по технической сущности к изобретению является система программного управления выбором инструмента, содержащая блок задания программ, регистр кода, блок сравнения, триггер управления, привод, основной и дополнительный датчики счета останова, флажки, магазин инструментов, датчик начальной установки, нормирующие преобразователи, блок формирования импульсов счета, счетчик кода и блок индикации.
Известная система характеризуется значительной сложностью, так как блок формирования импульсов счета сложнее всего предлагаемого устройства, а следовательно, и недостаточной надежностью в работе.
Цель изобретения - упрощение конструкции и повышение надежности,
Цель достигается тем, что в устройство для управления многопозиционным объектом, содержащее блок задания программ, установленный в головке реверсивный электропривод переменного тока, группу датчиков определения позиций обработки, введены четыре элемента И и группа элементов И по числу позиций обработки, пять элементов ИЛИ, два формирователя импульсов из потенциального сигнала, два элемента задержки, реле тока, включенное в одну из фаз привода, датчик момента фиксации головки, датчик верхнего положения пиноли, выход которого соединен с сигнальным входом блока задания программ, установочный выход которого соединен с входом установки исходного состояния счетчика, группа выходов разрешения работы с блока задания программ подключена к первым входам группы элементов И, другие
выходы подключены соответственно к первым входам первого и четвертого элементов И, к первым входам второго и третьего элементов И, к включающему входу первого
элемента памяти, к разрешающим входам четвертого и второго датчиков, выходы которых соединены с соответствующими входами первого элемента ИЛИ, выход которого соединен с входом первого формирователя
импульсов из потенциального сигнала, выход которого соединен с вторыми входами первого и второго элементов И, выход первого элемента И соединен с первым входом второго элемента ИЛИ, а выход второго элемента И соединен со счетным входом счетчика импульсов, информационные выходы которого соединены с вторыми входами элементов И группы, выходы которых соединены с группой входов второго элемента ИЛИ,
выход которого соединен с первым установочным входом первого элемента памяти и с включающим входом второго элемента памяти, вторые входы третьего и четвертого элементов И соединены с входом первого
элемента памяти, а их выходы соединены соответственно с входами первого и второго элементов задержки, выходы которых соединены с соответствующими входами третьего элемента ИЛИ, выход которого
соединен с входом второго элемента памяти, с входом индикации блока задания и программ и с первым входом четвертого элемента ИЛИ, второй вход которого соединен с выходом второго формирователя импульсов из потенциального сигнала, входы которого подключены к источнику питания, а выход четвертого элемента ИЛИ соединен с третьими входами первого и второго элементов памяти, выходы первого и второго
элементов памяти соединены с входами привода, выходы реле блока и датчика моментов фиксации головки соединены с входами пятого элемента ИЛИ, выход которого соединен с четвертым входом второго элемента памяти.
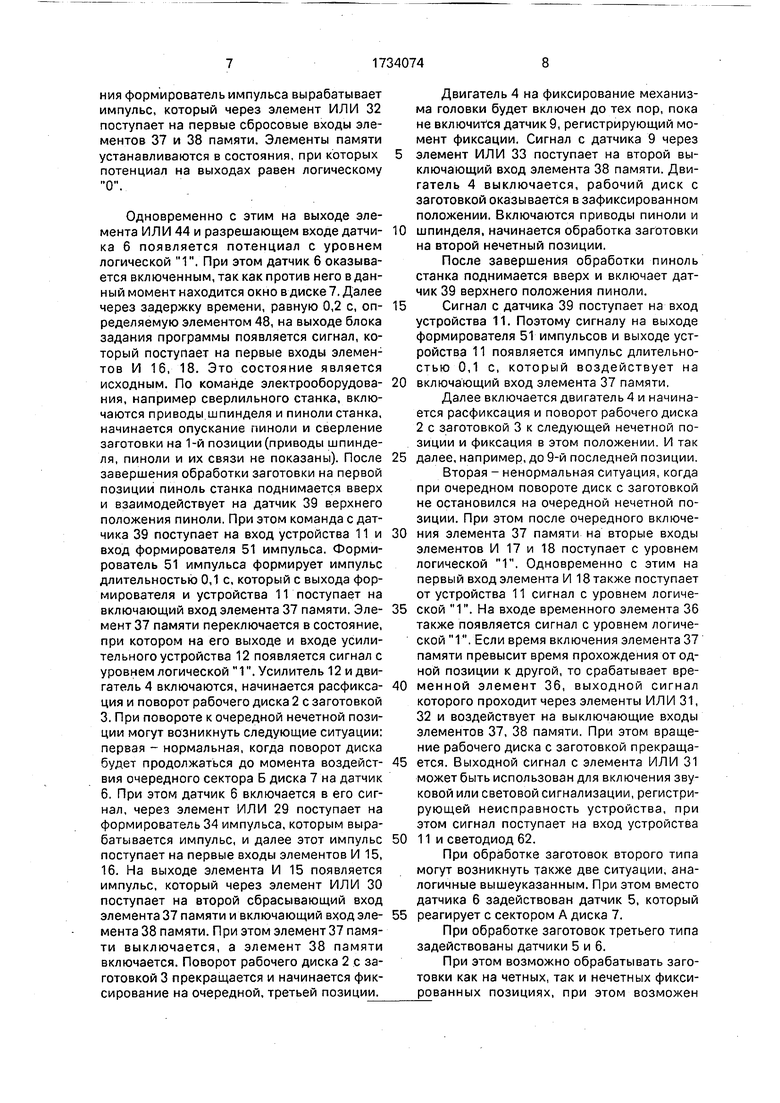
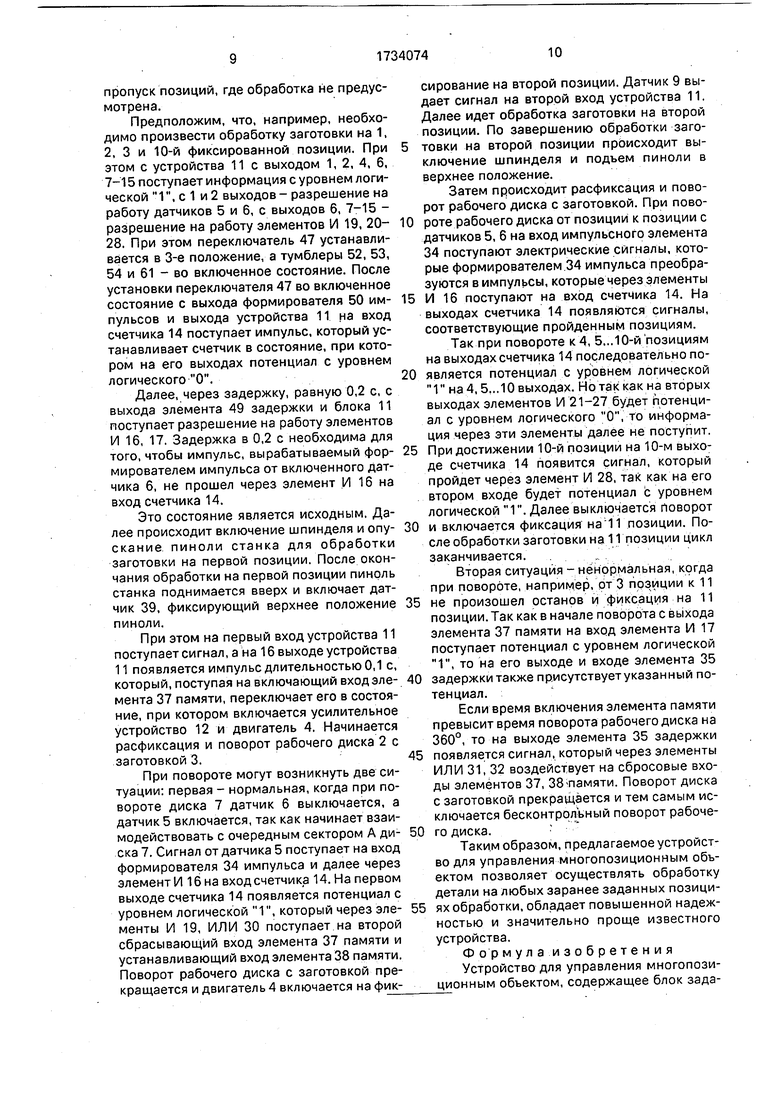
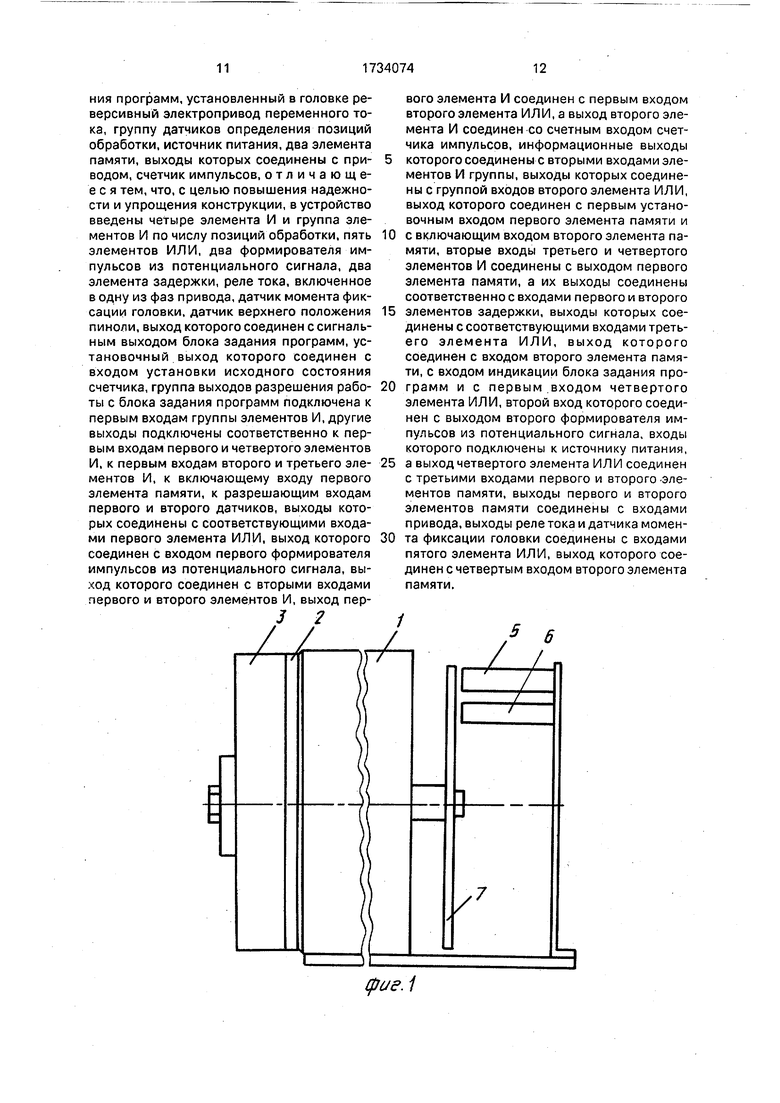
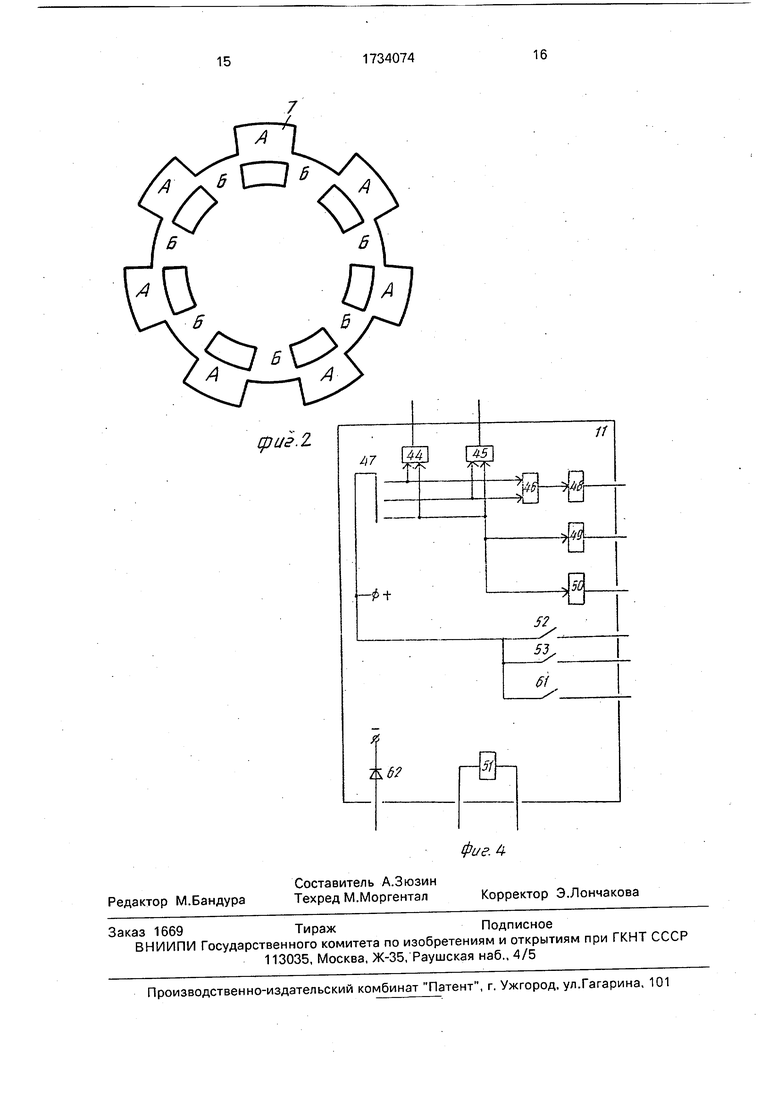
На фиг.1 изображена автоматическая многопозиционная головка; на фиг.2 - зубчатый диск индуктивных датчиков; на фиг.З - функциональная схема предлагаемого устройства; на фиг.4 - блок задания программы.
Автоматическая многопозиционная головка 1 представляет собой электромехани- ческое устройство одностороннего направления поворота рабочего диска 2 с заготовкой 3, имеющее определенное количество фиксированных положений. В головке 1 установлен реверсивный электродвигатель 4 переменного тока.
При прямом включении привода происходит расфиксирование и поворот рабочего диска 2, например, против часовой стрелки. При реверсивном включении привода происходит фиксирование рабочего диска 2 на необходимой позиции. Заготовка 3, закрепленная на рабочем диске, требует, например, радиальной обработки вращающимся инструментом, закрепленным в патроне (не показаны). Обрабатываться могут заготовки по крайней мере трех типов: первого, когда требуется последовательная обработка на нечетных фиксированных позициях; второго, когда требуется последовательная обработка на четных фиксированных позициях; третьего, когда требуется последовательная обработка как на четных, так и на нечетных фиксированных позициях. При этом возможен пропуск позиций, где обработка не предусмотрена.
Устройство для управления автоматической многопозиционной головкой 1 содержит индуктивные датчики 5 и 6 определения четных и нечетных позиций обработки.
Датчики 5 и 6 закреплены на торце корпуса головки и взаимодействуют с зубчатым диском 7, закрепленным на оси головки 1. Зубчатый диск 7 имеет в зонах под зубцами прорези, образуя секторы А и Б. Датчик 5 взаимодействует с секторами А диска 7, а датчик 6 взаимодействует с секторами Б диска 7.
Устройство для управления головкой 1 содержит реле 8 тока, установленное в одной из фаз электродвигателя 4, датчик 9 момента фиксации головки, источник 10 питания, блок И задания программы, два усилительных блока 12 и 13 с взаимной блокировкой, выходы которых соединены с обмотками электродвигателя 4. Устройство содержит счетчик 14, четыре элемента И 15-18 и элементы И 19-28 по числу позиций обработки, пять элементов ИЛИ 29-33, импульсный элемент 34, два временных элемента 35 и 36, два элемента 37 и 38 памяти, датчик 39 верхнего положения пиноли.
Элемент 37 памяти состоит из двух элементов ИЛИ-НЕ 40и41, а элемент38 памяти состоит из элементов ИЛИ-НЕ 42 и 43.
Выход датчика 39 верхнего положения пиноли соединен с одним из выходов блока 11 задания программ, выходы которого соединены с одним из входов счетчика 14, с первым входом первого элемента 37 памяти и первыми входами элементов И 15-28. Выходы датчиков 5 и 6 определения позиций обработки соединены с входами первого элемента ИЛИ 29, выход которого соединен с входами импульсного элемента 34, выход которого соединен с вторыми входами первого и второго элемента И 15 и 16. Выход элемента И 15 соединен с одним из выходов второго элемента ИЛ И 30, а выход элемента И 16 соединен с другим входом счетчика 14,
выходы которого соединены с вторыми входами элементов И 19-28, выбранных по числу позиций обработки, выходы которых соединены с другими входами второго элемента ИЛИ 30, выход которого соединен с
0 третьим входом первого элемента 37 памяти и первым входом второго элемента 38 памяти. Вторые входы третьего и четвертого элементов И 17 и 18 соединены с выходом первого элемента 37 памяти, а их выходы
5 соединены соответственно с входами первого и второго временных элементов 35 и 36, выходы которых соединены с входами третьего элемента ИЛИ 31, выход которого соединен с четвертым входом второго эле0 мента памяти и первым входом четвертого элемента ИЛИ 32, второй вход которого соединен с выходом источника 10 питания, а выход- с вторыми входами первого и второго элементов 37 и 38 памяти. Выходы перво5 го и второго элементов 37 и 38 памяти соединены с первыми входами соответственно первого и второго усилительного блока 12 и 13. Выход реле тока и выход датчика 9 момента фиксации головки соединены с
0 входами пятого элемента ИЛИ 33, выход которого соединен с третьим входом второго элемента 38 памяти и с другим входом блока 11 задания программ.
Элементы 37 и 38 памяти содержат по
5 два элемента ИЛИ-НЕ 40 и 41, 42 и 43. В каждом элементе 37 и 38 памяти первый вход первого элемента ИЛИ-НЕ 40 и 42 соединен с первым входом соответствующего элемента памяти, при этом выход пер0 вого элемента памяти соединен с первым входом второго элемента памяти. Второй вход первого элемента ИЛИ-НЕ соединен с выходом второго элемента ИЛИ-НЕ и с выходом соответствующего элемента памяти.
5 Остальные входы вторых элементов ИЛИ- НЕ 41 и 43 в каждом элементе памяти соединены с соответствующим по счету входом элемента памяти.
Блок 11 задания программ (фиг.4) вклю0 чает три элемента ИЛИ 44, 45, 46, переключатель 47, элементы 48 и 49 задержки, формирователи 50 и 51 импульса, тумблеры 52, 53...61, светодиод 62.
Устройство работает следующим обра5 зом.
Предположим, что обработку заготовки необходимо произвести последовательно, например, на пяти нечетных позициях (1, 3, 5, 7, 9). Установим переключатель 47 (фиг.4) в первое положение. После включения питания формирователь импульса вырабатывает импульс, который через элемент ИЛИ 32 поступает на первые сбросовые входы элементов 37 и 38 памяти. Элементы памяти устанавливаются в состояния, при которых потенциал на выходах равен логическому О.
Одновременно с этим на выходе элемента ИЛИ 44 и разрешающем входе датчика б появляется потенциал с уровнем логической 1. При этом датчик 6 оказывается включенным, так как против него в данный момент находится окно в диске 7. Далее через задержку времени, равную 0,2 с, определяемую элементом 48, на выходе блока задания программы появляется сигнал, который поступает на первые входы элементов И 16, 18. Это состояние является исходным. По команде электрооборудования, например сверлильного станка, включаются приводы шпинделя и пиноли станка, начинается опускание пиноли и сверление заготовки на 1-й позиции (приводы шпинделя, пиноли и их связи не показаны). После завершения обработки заготовки на первой позиции пиноль станка поднимается вверх и взаимодействует на датчик 39 верхнего положения пиноли. При этом команда с датчика 39 поступает на вход устройства 11 и вход формирователя 51 импульса. Формирователь 51 импульса формирует импульс длительностью 0,1 с, который с выхода формирователя и устройства 11 поступает на включающий вход элемента 37 памяти. Элемент 37 памяти переключается в состояние, при котором на его выходе и входе усилительного устройства 12 появляется сигнал с уровнем логической 1. Усилитель 12 и двигатель 4 включаются, начинается расфикса- ция и поворот рабочего диска 2 с заготовкой 3. При повороте к очередной нечетной позиции могут возникнуть следующие ситуации: первая - нормальная, когда поворот диска будет продолжаться до момента воздействия очередного сектора Б диска 7 на датчик 6, При этом датчик 6 включается в его сигнал, через элемент ИЛИ 29 поступает на формирователь 34 импульса, которым вырабатывается импульс, и далее этот импульс поступает на первые входы элементов И 15, 16. На выходе элемента И 15 появляется импульс, который через элемент ИЛИ 30 поступает на второй сбрасывающий вход элемента 37 памяти и включающий вход элемента 38 памяти. При этом элемент 37 памяти выключается, а элемент 38 памяти включается. Поворот рабочего диска 2 с заготовкой 3 прекращается и начинается фиксирование на очередной, третьей позиции.
Двигатель 4 на фиксирование механизма головки будет включен до тех пор, пока не включится датчик 9, регистрирующий момент фиксации. Сигнал с датчика 9 через
элемент ИЛИ 33 поступает на второй выключающий вход элемента 38 памяти. Двигатель 4 выключается, рабочий диск с заготовкой оказывается в зафиксированном положении. Включаются приводы пиноли и
0 шпинделя, начинается обработка заготовки на второй нечетный позиции.
После завершения обработки пиноль станка поднимается вверх и включает датчик 39 верхнего положения пиноли.
5 Сигнал с датчика 39 поступает на вход устройства 11. Поэтому сигналу на выходе формирователя 51 импульсов и выходе устройства 11 появляется импульс длительностью 0,1 с, который воздействует на
0 включающий вход элемента 37 памяти.
Далее включается двигатель 4 и начинается расфиксация и поворот рабочего диска 2 с заготовкой 3 к следующей нечетной позиции и фиксация в этом положении. И так
5 далее, например, до 9-й последней позиции. Вторая - ненормальная ситуация, когда при очередном повороте диск с заготовкой не остановился на очередной нечетной позиции. При этом после очередного включе0 ния элемента 37 памяти на вторые входы элементов И 17 и 18 поступает с уровнем логической 1. Одновременно с этим на первый вход элемента И 18 также поступает от устройства 11 сигнал с уровнем логиче5 ской 1. На входе временного элемента 36 также появляется сигнал с уровнем логической 1. Если время включения элемента 37 памяти превысит время прохождения от одной позиции к другой, то срабатывает вре0 менной элемент 36, выходной сигнал которого проходит через элементы ИЛИ 31, 32 и воздействует на выключающие входы элементов 37, 38 памяти. При этом вращение рабочего диска с заготовкой прекраща5 ется. Выходной сигнал с элемента ИЛИ 31 может быть использован для включения звуковой или световой сигнализации, регистрирующей неисправность устройства, при этом сигнал поступает на вход устройства
0 11 и светодиод 62.
При обработке заготовок второго типа могут возникнуть также две ситуации, аналогичные вышеуказанным. При этом вместо датчика 6 задействован датчик 5, который
5 реагирует с сектором А диска 7.
При обработке заготовок третьего типа задействованы датчики 5 и 6.
При этом возможно обрабатывать заготовки как на четных, так и нечетных фикси- рованных позициях, при этом возможен
пропуск позиций, где обработка не предусмотрена.
Предположим, что, например, необходимо произвести обработку заготовки на 1, 2, 3 и 10-й фиксированной позиции. При этом с устройства 11с выходом 1, 2, 4, 6, 7-15 поступает информация с уровнем логической 1, с 1 и 2 выходов- разрешение на работу датчиков 5 и 6, с выходов 6, 7-15 - разрешение на работу элементов И 19, 20- 28. При этом переключатель 47 устанавливается в 3-е положение, а тумблеры 52, 53, 54 и 61 - во включенное состояние. После установки переключателя 47 во включенное состояние с выхода формирователя 50 импульсов и выхода устройства 11 на вход счетчика 14 поступает импульс, который устанавливает счетчик в состояние, при котором на его выходах потенциал с уровнем логического О.
Далее, через задержку, равную 0,2 с, с выхода элемента 49 задержки и блока 11 поступает разрешение на работу элементов И 16, 17. Задержка в 0,2 с необходима для того, чтобы импульс, вырабатываемый формирователем импульса от включенного датчика 6, не прошел через элемент И 16 на вход счетчика 14.
Это состояние является исходным. Далее происходит включение шпинделя и опускание пиноли станка для обработки заготовки на первой позиции. После окончания обработки на первой позиции пиноль станка поднимается вверх и включает датчик 39, фиксирующий верхнее положение пиноли.
При этом на первый вход устройства 11 поступает сигнал, а на 16 выходе устройства 11 появляется импульс длительностью 0,1 с, который, поступая на включающий вход элемента 37 памяти, переключает его в состояние, при котором включается усилительное устройство 12 и двигатель 4. Начинается расфиксация и поворот рабочего диска 2 с заготовкой 3.
При повороте могут возникнуть две ситуации: первая - нормальная, когда при повороте диска 7 датчик 6 выключается, а датчик 5 включается, так как начинает взаимодействовать с очередным сектором А диска 7. Сигнал от датчика 5 поступает на вход формирователя 34 импульса и далее через элемент И 16 на вход счетчика 14. На первом выходе счетчика 14 появляется потенциал с уровнем логической 1, который через элементы И 19, ИЛИ 30 поступает на второй сбрасывающий вход элемента 37 памяти и устанавливающий вход элемента 38 памяти. Поворот рабочего диска с заготовкой прекращается и двигатель 4 включается на фиксирование на второй позиции. Датчик 9 выдает сигнал на второй вход устройства 11. Далее идет обработка заготовки на второй позиции. По завершению обработки заготовки на второй позиции происходит выключение шпинделя и подъем пиноли в верхнее положение.
Затем происходит расфиксация и поворот рабочего диска с заготовкой. При пово0 роте рабочего диска от позиции к позиции с датчиков 5, 6 на вход импульсного элемента 34 поступают электрические сигналы, которые формирователем 34 импульса преобразуются в импульсы, которые через элементы
5 И 16 поступают на вход счетчика 14. На выходах счетчика 14 появляются сигналы, соответствующие пройденным позициям.
Так при повороте к 4, 5,..10-й позициям на выходах счетчика 14 последовательно по0 является потенциал с уровнем логической 1 на 4, 5...10 выходах. Но так как на вторых выходах элементов И 21-27 будет потенциал с уровнем логического О, то информация через эти элементы далее не поступит.
5 При достижении 10-й позиции на 10-м выходе счетчика 14 появится сигнал, который пройдет через элемент И 28, так как на его втором входе будет потенциал с уровнем логической 1. Далее выключается поворот
0 и включается фиксация на 11 позиции. После обработки заготовки на 11 позиции цикл заканчивается.
Вторая ситуация - ненормальная, когда при повороте, например, от 3 позиции к 11
5 не произошел останов и фиксация на 11 позиции. Так как в начале поворота с выхода элемента 37 памяти на вход элемента И 17 поступает потенциал с уровнем логической 1, то на его выходе и входе элемента 35
0 задержки также присутствуетуказанный потенциал.
Если время включения элемента памяти превысит время поворота рабочего диска на 360°, то на выходе элемента 35 задержки
5 появляется сигнал, который через элементы ИЛИ 31, 32 воздействует на сбросовые входы элементов 37, 38-памяти. Поворот диска с заготовкой прекращается и тем самым исключается бесконтрольный поворот рабоче0 го диска.
Таким образом, предлагаемое устройство для управления многопозиционным объектом позволяет осуществлять обработку детали на любых заранее заданных позици5 ях обработки, обладает повышенной надежностью и значительно проще известного устройства.
Формула изобретения Устройство для управления многопозиционным объектом, содержащее блок задания программ, установленный в головке реверсивный электропривод переменного тока, группу датчиков определения позиций обработки, источник питания, два элемента памяти, выходы которых соединены с приводом, счетчик импульсов, отличающееся тем, что, с целью повышения надежности и упрощения конструкции, в устройство введены четыре элемента И и группа элементов И по числу позиций обработки, пять элементов ИЛИ, два формирователя импульсов из потенциального сигнала, два элемента задержки, реле тока, включенное в одну из фаз привода, датчик момента фиксации головки, датчик верхнего положения пиноли, выход которого соединен с сигнальным выходом блока задания программ, установочный выход которого соединен с входом установки исходного состояния счетчика, группа выходов разрешения работы с блока задания программ подключена к первым входам группы элементов И, другие выходы подключены соответственно к первым входам первого и четвертого элементов И, к первым входам второго и третьего элементов И, к включающему входу первого элемента памяти, к разрешающим входам первого и второго датчиков, выходы которых соединены с соответствующими входами первого элемента ИЛИ, выход которого соединен с входом первого формирователя импульсов из потенциального сигнала, выход которого соединен с вторыми входами первого и второго элементов И, выход первого элемента И соединен с первым входом второго элемента ИЛИ, а выход второго элемента И соединен со счетным входом счетчика импульсов, информационные выходы которого соединены с вторыми входами элементов И группы, выходы которых соединены с группой входов второго элемента ИЛИ, выход которого соединен с первым установочным входом первого элемента памяти и с включающим входом второго элемента памяти, вторые входы третьего и четвертого элементов И соединены с выходом первого элемента памяти, а их выходы соединены соответственно с входами первого и второго элементов задержки, выходы которых соединены с соответствующими входами третьего элемента ИЛИ, выход которого соединен с входом второго элемента памяти, с входом индикации блока задания про- грамм и с первым входом четвертого элемента ИЛИ, второй вход которого соединен с выходом второго формирователя импульсов из потенциального сигнала, входы которого подключены к источнику питания, а выход четвертого элемента ИЛИ соединен с третьими входами первого и второго элементов памяти, выходы первого и второго элементов памяти соединены с входами привода, выходы реле тока и датчика момен- 0 та фиксации головки соединены с входами пятого элемента ИЛИ, выход которого соединен с четвертым входом второго элемента памяти.
tpve.1
фиг.2.
Редактор М.Бандура
Составитель А.Зюзин Техред М.Моргентал
//
f-
фие. 4
Корректор Э.Лончакова
| Система автоматического управления положением детали | 1981 |
|
SU971619A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Система программного управления выбором инструмента | 1986 |
|
SU1388830A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
