Изобретение относится к области электрического транспорта, в частности к способам и устройствам пуска и регулирования скорости электроподвижного состава с импульсным регулированием.
Известен способ регулирования напряжения на тяговых двигателях, при котором измеряют среднее значение тока тягового двигателя, вычитают из заданного значения тока якоря тягового двигателя измеренное значение, вводят эту разность в регулятор коэффициента заполнения импульсного преобразователя и, в соответствии с его значением, изменяют напряжение на двигателях (см. журнал «Железнодорожный транспорт» 1994, №3, с.48-49).
Способ реализуется схемой, содержащей входной LC-фильтр, выход которого соединен с анодом главного тиристора и входом коммутирующего конденсатора, выход которого соединен с анодом коммутирующего тиристора и входом коммутирующего дросселя, выход которого соединен с катодом коммутирующего диода, анод которого соединен с катодами главного и коммутирующего тиристора, катодом обратного диода и первым выводом сглаживающего реактора, второй вывод которого соединен с первым выводом якоря двигателя, второй вывод которого соединен с первым выводом обмотки возбуждения двигателя, зашунтированной резистором, а второй вывод обмотки возбуждения объединен общей точкой с анодом обратного диода (см. журнал «Железнодорожный транспорт» 1994, №3, с.48).
Недостатком этого способа является следующее: время, в течение которого импульсный преобразователь открыт, не может быть меньше суммы интервалов времени, необходимых для перезаряда коммутирующей емкости, поэтому коэффициент заполнения не может быть равен нулю и регулирование напряжения ведут с некоторого начального значения, не позволяющего реализовать движение на маневровых позициях.
Наиболее близким по технической сущности является способ регулирования напряжения на тяговых двигателях, при котором вводят заданное и среднее значение тока якоря тягового двигателя, определяют разность между заданным и средним значениями тока якоря двигателя, вводят эту разность в регулятор коэффициента заполнения импульсного преобразователя и, пропорционально величине коэффициента заполнения, изменяют напряжение на двигателе, причем при пуске увеличивают длительность периода работы импульсного преобразователя, реализуя минимальную длительность проводящего состояния импульсного преобразователя, а затем длительность периода работы преобразователя плавно доводят до номинального (см. журнал «Железнодорожный транспорт» 1994, №3, с.53-54).
Этот способ позволяет осуществить движение на маневровых позициях, однако, при таком способе на участках пути с частотной системой автоблокировки плавное регулирование длительности периода преобразования недопустимо, так как частоты тягового тока и кодовых посылок могут совпасть. Поэтому регулирование частоты импульсного преобразователя ведется дискретно и, следовательно, при постоянной минимальной длительности проводящего состояния импульсного преобразователя, токи якорей и сила тяги изменяются ступенчато.
Этот способ реализуется схемой, содержащей входной LC-фильтр, выход которого соединен с первыми выводами коммутирующих дросселя и конденсатора, второй вывод коммутирующего дросселя соединен с анодом тиристора, катод которого соединен со вторым выходом коммутирующего конденсатора, с катодом обратного диода и, через сглаживающий реактор, с первым выводом якоря тягового двигателя, второй вывод которого через обмотку возбуждения двигателя соединен с анодом обратного диода и общей точкой (см. Тихменев Б.Н., Трахтман Л.М. Подвижной состав электрифицированных железных дорог. Теория работы электрооборудования. Электрические схемы и аппараты. М.: Транспорт, 1980. - 471 с., с.238).
Недостатком этой схемы является большое количество элементов, снижающее ее надежность. Кроме того, существенная зависимость ширины импульса от тока нагрузки тягового двигателя (с уменьшением тока нагрузки увеличивается коэффициент заполнения преобразователя) «смягчает» выходные характеристики преобразователя, что в сочетании с «мягкими» характеристиками двигателей последовательного возбуждения значительно ухудшает тяговые и тормозные свойства электровоза.
Задачей изобретений является реализация движения электровоза на маневровых позициях без толчков силы тяги и без оказания опасных и мешающих воздействий на сигналы автоблокировки и обеспечение требований электромагнитной совместимости согласно «Электровозы. Требования по сертификации СТС ЖТ ФТС ЦТ 04-18». Кроме того, задача изобретений включает улучшение тяговых и тормозных свойств электровоза и повышение надежности схемы регулирования напряжения.
Поставленная задача решается тем, что в известном способе, при котором вводят заданное и среднее значения тока якоря тягового двигателя, определяют разность между заданным и средним значениями токов якоря двигателя, вводят эту разность в регулятор коэффициента заполнения импульсного преобразователя и пропорционально величине коэффициента заполнения изменяют напряжение на двигателе, снижают частоту преобразования до значения f1, например, 100 Гц, чтобы сформировать небольшие токи и реализовать маневровые тяговые усилия. При движении на номинальных (рабочих) скоростях частоту преобразования восстанавливают до номинальной f2, например 600 Гц. Чтобы сохранить значение силы тяги при переходе с одной частоты преобразования на другую необходимо изменять длительность проводящего состояния преобразователя в соответствии с выражением
где t1 - длительность проводящего состояния при работе с частотой f1;
f2 и t2 - частота преобразования и длительность проводящего состояния после перехода, соответственно.
При выходе на естественную характеристику, т.е. при приближении напряжения на двигателях к номинальному, с той же целью опять снижают частоту преобразования, а при значении напряжения на двигателе, близком к номинальному, преобразователь шунтируют.
Сформировать небольшие токи для реализации маневровых тяговых усилий на номинальной частоте преобразования импульсного преобразователя трудно, т.к. длительность проводящего состояния преобразователя становится сравнимой со временем включения и выключения преобразователя, что приводит к большим потерям при переключении полупроводниковых приборов преобразователя и выходу их из строя.
Этот способ позволяет плавно регулировать силу тяги, несмотря на то, что изменение частоты преобразования преобразователя при переходе с маневровой на ходовую позицию происходит ступенчато. Ступенчатое изменение частоты преобразования сопровождается изменением длительности проводящего состояния импульсного преобразователя в соответствии с  , что обеспечивает сохранение величины среднего напряжения за период преобразования преобразователя, а следовательно, сохраняет значения тяговых токов и силы тяги электровоза. Значения частот маневровой и ходовых частот преобразования выбирают в обход рабочих частот системы автоблокировки. Например, для электровоза постоянного тока с шестью тяговыми двигателями, частоту преобразования на маневровой позиции выбирают 100 Гц, тогда частота пульсаций тягового тока будет 600 Гц, а на ходовых позициях - частота преобразования 600 Гц соответственно, частота тягового тока 3600 Гц, что не совпадает с рядом рабочих частот СЦБ: 25; 50; 75; 175; 420; 480; 580; 720; 780; 4545; 5000; 5555 Гц.
, что обеспечивает сохранение величины среднего напряжения за период преобразования преобразователя, а следовательно, сохраняет значения тяговых токов и силы тяги электровоза. Значения частот маневровой и ходовых частот преобразования выбирают в обход рабочих частот системы автоблокировки. Например, для электровоза постоянного тока с шестью тяговыми двигателями, частоту преобразования на маневровой позиции выбирают 100 Гц, тогда частота пульсаций тягового тока будет 600 Гц, а на ходовых позициях - частота преобразования 600 Гц соответственно, частота тягового тока 3600 Гц, что не совпадает с рядом рабочих частот СЦБ: 25; 50; 75; 175; 420; 480; 580; 720; 780; 4545; 5000; 5555 Гц.
На больших скоростях движения для уменьшения электрических коммутационных потерь в электрооборудовании снижают частоту преобразования, а при выходе на естественную характеристику - шунтируют преобразователь.
Способ реализуется импульсным преобразователем для регулирования напряжения на тяговых двигателях, содержащим последовательно включенные входной LC-фильтр, полупроводниковый регулирующий элемент, сглаживающий реактор, тяговый двигатель и обмотку возбуждения двигателя, зашунтированные обратным диодом, анод которого соединен с общей точкой, отличается тем, что регулирующий элемент выполнен в виде транзистора, один из силовых выводов которого присоединен к выходному выводу LC-фильтра, другой силовой вывод соединен с катодом обратного диода, а управляющий вывод - с клеммой для подачи управляющего сигнала от микропроцессорного блока управления, которая выполнена с возможностью снижения частоты преобразования до f1, например до 100 Гц, при маневровой скорости движения электровоза, восстановления частоты преобразования до номинальной f2, например 600 Гц, при движении на рабочих скоростях и вычисления длительности t2 нового проводящего состояния преобразователя при переходе с частоты преобразования f1 на f2 по выражению 
где t1 - время проводящего состояния преобразователя при работе с частотой f1.
Импульсный преобразователь, отличающийся тем, что к выходу LC-фильтра подключены n параллельных цепей, содержащих последовательно включенные транзисторы, сглаживающий реактор и тяговый двигатель с обмоткой возбуждения, где n=1, 2, 3, ..., причем сглаживающий реактор и тяговый двигатель с обмоткой возбуждения каждой цепи зашунтированы обратным диодом.
Импульсный преобразователь, отличающийся тем, что параллельно каждому транзистору включены k транзисторов, где k=1, 2, 3,....
Импульсный преобразователь, отличающийся тем, что каждая обмотка возбуждения тягового двигателя зашунтирована последовательно включенными резистором и замыкающим контактом контактора ослабления поля.
Импульсный преобразователь, отличающийся тем, что каждая обмотка возбуждения тягового двигателя зашунтирована последовательно включенными резистором и замыкающим контактом контактора ослабления поля.
Импульсный преобразователь, отличающийся тем, что последовательно с каждой цепью, содержащей последовательно соединенные транзистор и зашунтированные обратным диодом сглаживающий реактор и тяговый двигатель с обмоткой возбуждения, включена такая же цепь, а между общими точками дополнительных цепей включен конденсатор, емкость которого равна емкости конденсатора LC-фильтра.
Импульсный преобразователь, отличающийся тем, что якори последовательно соединенных тяговых двигателей и соответствующие сглаживающие реакторы попарно соединены через замыкающие контакты тормозного контактора последовательно с тормозным резистором, имеющим вывод для подключения возбудителя.
Эта схема не содержит коммутирующих цепей запирания тиристора, т.к. тиристор заменен транзистором, поэтому длительность проводящего состояния импульсного преобразователя не зависит от тока нагрузки, что исключает положительную обратную связь по току и позволяет реализовать жесткие выходные характеристики преобразователя, улучшив противобуксовочные свойства электровоза.
Кроме того, предлагаемая схема надежнее прототипа, т.к. содержит меньше элементов.
На фиг.1 приведена схема устройства, реализующего способ регулирования для одного тягового двигателя; на фиг.2 - алгоритм перехода с одной частоты работы импульсного преобразователя на другую и определения коэффициента заполнения преобразователя; на фиг.3, 4 - варианты схем, реализующих способ для тяговых двигателей электровоза.
Импульсный преобразователь (фиг.1) содержит входной LC-фильтр, выход которого соединен с силовым выводом (коллектором) регулирующего элемента, выполненного в виде транзистора VT. Другой силовой вывод (эмиттер) транзистора VT соединен с последовательно включенными сглаживающим реактором Lp, якорем двигателя Д и его обмоткой возбуждения ОВ, а управляющий вывод транзистора с клеммой для подачи импульсов управления. Сглаживающий реактор Lp, якорь двигателя Д и его обмотка возбуждения ОВ зашунтированы обратным диодом VD, анод которого соединен с общей точкой.
На фиг.1 также показаны пантограф электровоза П, контактная сеть КС и микропроцессорная система управления МПСУ, подающая импульсы управления на управляющий вывод транзистора VT.
Схема работает следующим образом.
При поднятом пантографе П напряжение контактной сети КС подается на вход LC-фильтра и заряжает конденсатор С.
Микропроцессорная система управления в составе стандартных блоков (процессор, ОЗУ, ПЗУ, АЦП, порты ввода-вывода дискретных сигналов), например контроллер M167-1C (см. каталог продукции «Бортовая промышленная электроника» АО «Каскад», 105037, Москва, Измайловская пл.7) при приходе тактового импульса осуществляет ввод заданного и среднего значений токов тягового двигателя (блок 1, фиг.2). При работе на ходовых позициях (ω>ωм, блок 2 и γ<0,9, блоки 3, 4) и неустановленном идентификаторе М (блок 5) определяют разность ΔI между заданным I3 и средним I значениями тока якоря двигателя (блок 6), вводят эту разность в регулятор коэффициента заполнения импульсного преобразователя (блоки 7, 8) и пропорционально величине коэффициента заполнения изменяют время t проводящего состояния импульсного преобразователя (блок 9), которое отсчитывается таймером Т (блок 10), при этом на управляющий вывод транзистора VT поступает управляющий сигнал, открывающий его.
При работе на маневровых позициях (скорость электровоза меньше или равна маневровой ωм, блок 2), если идентификатор М не установлен (М=0, блок 11), т.е. необходим переход на пониженную частоту f1, изменяется частота тактового генератора (блок 12), вычисляется длительность нового проводящего состояния импульсного преобразователя t (блок 13), устанавливается идентификатор М (блок 14) и запускается таймер Т, отсчитывая новую длительность проводящего состояния импульсного преобразователя (блок 10).
При возвращении с маневровых позиций на ходовые (ω>ωм, блок 2, γ<0,9, блоки 3, 4, М=1 блок 5) осуществляют обратный переход: увеличивается частота тактового генератора (блок 15), определяют длительность нового проводящего состояния импульсного преобразователя (блок 16), обнуляется идентификатор М (блок 17) и запускается таймер Т, блок 10.
Если значение коэффициента заполнения станет больше 0,95, то выдают команду на шунтировку импульсного преобразователя (блок 18).
При подаче управляющего сигнала на управляющий вывод транзистора VT он открывается, к последовательно соединенным сглаживающему реактору Lp, двигателю Д и его обмотке возбуждения ОВ, прикладывают напряжение LC-фильтра. Изменяя частоту и длительность управляющего сигнала на управляющем выводе транзистора VT, регулируют напряжение на тяговом двигателе. Сглаживающий реактор Lp и обратный диод VD предназначены для снижения уровня пульсаций тока тягового двигателя, а входной LC-фильтр демпфирует воздействие регулирования на контактную сеть.
Замена коммутирующего узла и тиристора транзистором позволяет снижать выходное напряжение преобразователя почти до нуля (ограничено временем включения выключения транзистора, меньше 10 μс), ширина проводящего состояния преобразователя не зависит от тока нагрузки, т.е. отсутствует положительная обратная связь по току двигателя, что повышает «жесткость» выходной характеристики преобразователя и улучшает тяговые свойства электровоза. Кроме того, уменьшение затрат мощности на переключение преобразователя и уменьшение количества элементов повышает надежность схемы.
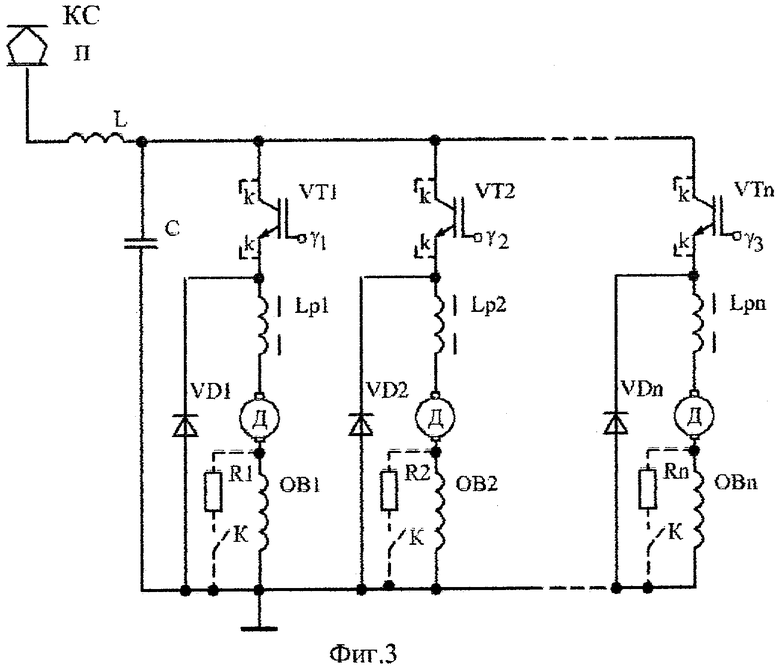
При наличии нескольких (n) тяговых двигателей (фиг.3) для снижения пульсаций тягового тока их целесообразно подключить к одному LC-фильтру, а их коммутацию с напряжением контактной сети разнести во времени.
При большой мощности тяговых двигателей в каждую цепь вместо одного транзистора включают несколько (k) транзисторов параллельно и переключают их поочередно (фиг.3, показано штриховыми линиями).
Для получения скоростей движения выше номинальных обмотки возбуждения тяговых двигателей шунтируют последовательно включенными резистором R и замыкающим контактом контактора ослабления поля К (показано штриховой линией на фиг.3).
Чтобы снизить номинальное напряжение, на которое рассчитывают тяговые двигатели, последовательно с каждой цепью из сглаживающего реактора и двигателя с обмоткой возбуждения включают такую же цепь (фиг.4). Тогда двигатели можно рассчитывать на половину напряжения контактной сети. Для симметричного распределения напряжения на тяговых двигателях между общими точками цепей включают конденсатор, емкость которого равна емкости конденсатора LC-фильтра.
Для осуществления реостатного торможения якори двигателей и соответствующие им сглаживающие реакторы попарно включают последовательно с тормозным резистором RT - показано на фиг.4 штриховой линией. На резисторах предусмотрены выводы для подключения возбудителя, регулирующего изменением тока возбуждения тормозную силу. Электрическое торможение осуществляется и при исчезновении напряжения в контактной сети.
Таким образом, предлагаемые способ и импульсный преобразователь позволяют плавно регулировать силу тяги при дискретном изменении частоты преобразования импульсных преобразователей в обход частот работы СБЦ, повышают электрическую устойчивость преобразователей, улучшая тяговые свойства электровоза, снижают потери в преобразователях и электрооборудовании, повышают надежность регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2385237C1 |
| ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА ПОСТОЯННОГО ТОКА С ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2008 |
|
RU2351483C1 |
| ТЯГОВЫЙ ПРИВОД | 2007 |
|
RU2384424C2 |
| Преобразовательная система электроснабжения собственных нужд электровоза | 2016 |
|
RU2612064C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2010 |
|
RU2450941C1 |
| СПОСОБ ПУСКА И РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ПОСТОЯННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208529C2 |
| Электрическая передача электровоза | 2017 |
|
RU2674998C1 |
| СПОСОБ ПЕРЕГРУППИРОВКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА С ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ И СХЕМА ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2283245C2 |
| ВОЗБУДИТЕЛЬ ТЯГОВЫХ МАШИН | 2004 |
|
RU2271064C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2010 |
|
RU2440900C1 |


Группа изобретений относится к области электрического транспорта, в частности к способам и устройствам пуска и регулирования скорости электроподвижного состава. В способе сначала определяют разность между заданным и средним значениями тока якоря двигателя. Затем вводят эту разность в регулятор коэффициента заполнения импульсного преобразователя и пропорционально величине коэффициента заполнения изменяют напряжение на двигателе. При маневровой скорости движения электровоза частоту преобразования снижают до f1, например до 100 Гц. При движении на рабочих скоростях частоту преобразования восстанавливают до номинальной f2, например 600 Гц, при этом при переходе с частоты преобразования f1 на f2 длительность t2 нового проводящего состояния преобразователя вычисляют как  , где где t1 - время проводящего состояния преобразователя при работе с частотой f1. Импульсный преобразователь для реализации способа содержит последовательно включенные входной LC-фильтр, полупроводниковый транзисторный регулирующий элемент, сглаживающий реактор, тяговый двигатель и обмотку возбуждения двигателя, зашунтированные обратным диодом. Управляющий вход регулирующего элемента соединен с микропроцессорным блоком управления. Группа изобретений позволяет реализовать движение электровоза на маневровых позициях без толчков силы тяги и без оказания опасных и мешающих воздействий на сигналы автоблокировки, а также обеспечить электромагнитную совместимость. 2 н. и 8 з.п. ф-лы, 4 ил.
, где где t1 - время проводящего состояния преобразователя при работе с частотой f1. Импульсный преобразователь для реализации способа содержит последовательно включенные входной LC-фильтр, полупроводниковый транзисторный регулирующий элемент, сглаживающий реактор, тяговый двигатель и обмотку возбуждения двигателя, зашунтированные обратным диодом. Управляющий вход регулирующего элемента соединен с микропроцессорным блоком управления. Группа изобретений позволяет реализовать движение электровоза на маневровых позициях без толчков силы тяги и без оказания опасных и мешающих воздействий на сигналы автоблокировки, а также обеспечить электромагнитную совместимость. 2 н. и 8 з.п. ф-лы, 4 ил.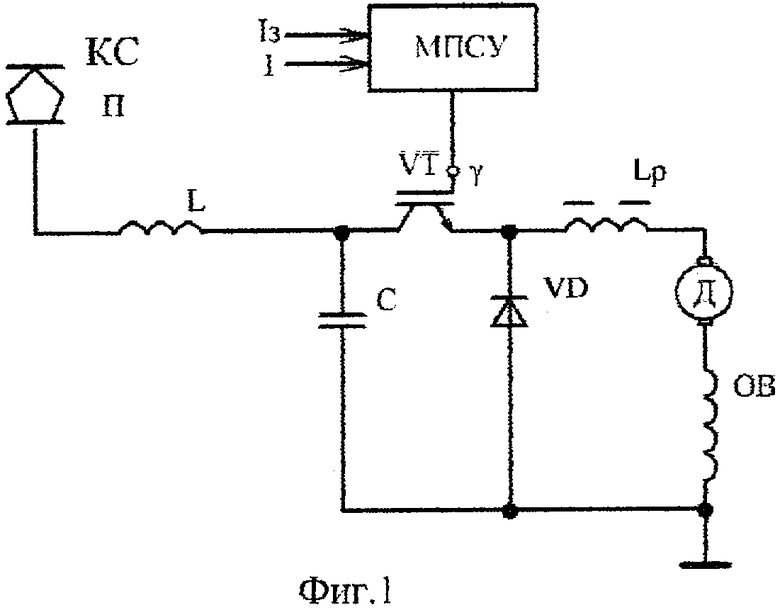

где t1 - время проводящего состояния преобразователя при работе с частотой f1.
 , например до 100 Гц, а при переходе с частоты преобразования
, например до 100 Гц, а при переходе с частоты преобразования  на f2 длительность t2 нового проводящего состояния преобразователя вычисляют по формуле
на f2 длительность t2 нового проводящего состояния преобразователя вычисляют по формуле
где t1 - время проводящего состояния преобразователя при работе с частотой .

где t1 - время проводящего состояния преобразователя при работе с частотой f1.
| ТУЛУПОВ В.Д | |||
| Эффективность электроподвижного состава с импульсным управлением | |||
| Ж | |||
| «Железнодорожный транспорт» | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
| Тихменев Б.Н | |||
| и др | |||
| Подвижной состав электрифицированных железных дорог | |||
| Теория работы электрооборудования | |||
| Электрические схемы и аппараты | |||
| - М.: Транспорт, с.238 | |||
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД С ПИТАНИЕМ ОТ КОНТАКТНОЙ СЕТИ ПОСТОЯННОГО ТОКА | 1999 |
|
RU2179934C2 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА С ПИТАНИЕМ ОТ КОНТАКТНОЙ СЕТИ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2221710C2 |
| СПОСОБ ПУСКА И РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ПОСТОЯННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208529C2 |
| Устройство для регулирования скорости электроподвижного состава | 1986 |
|
SU1397325A1 |

