Настоящее изобретение относится к области электродвижущихся транспортных средств, включая автомобили, мотоциклы, скутеры, электропоезда и т.д. В частности, настоящее изобретение связано с полноприводными транспортными средствами.
Полноприводными называют транспортные средства, у которых каждое из колес или колеса, находящиеся на одной оси, снабжены собственным двигателем. Поскольку при использовании нескольких электродвигателей значительно возрастает энергопотребление, то наибольшее распространение получили так называемые гибридные транспортные средства, которые используют, по крайней мере, одну комбинацию электрического мотора и электрогенератора, работающего на органическом топливе. Из уровня техники известны полноприводное транспортное средство с электропитанием от жидкостной или газовой турбины (US 6213234, VEHICLE POWERED BY A FUEL CELL/GAS TURBINE COMBINATION); гибридная электросиловая система, использующая турбинный двигатель (US 5762156, HYBRID ELECTRIC PROPULSION SYSTEM USING A DUEL SHAFT TURBINE ENGINE); гибридное электродвижущееся транспортное средство (US 5765656, HYBRIDELECTRIC MOTOR VEHICLE DRIVE); электросиловая система для транспортного средства (US 5764283, ELECTRIC PROPULSION SYSTEM FOR A VEHICLE) и другие устройства. Во всех вышеперечисленных патентах заявлены транспортные средства, использующие более одного электромотора, в некоторых случаях каждое из колес снабжено собственным электромотором. Все эти транспортные средства также содержат, по крайней мере, два источника питания для электромоторов: газовую или жидкостную турбину и электрический аккумулятор или батарею. Турбина работает, как обычный электрогенератор, который при движении запитывает электромоторы или заряжает аккумулятор, при этом используют различные схемы подключения источников питания к электромоторам. Например, электромобиль, заявленный в патенте '537, содержит газовую турбину, в качестве электрогенератора, который запитывает электромоторы, расположенные на каждом из колес. Или в другом варианте, питание электромоторов осуществляют от электрических батарей, которые в свою очередь заряжаются от электрогенератора.
Во всех вышеперечисленных устройствах передача вращающего момента от вала электродвигателя на колесо осуществляется посредством привода или передаточного механизма.
Например, в международной патентной заявке WO 2004/085186 описано транспортное средство, имеющее распределенную систему электромоторов под управлением центрального контроллера. Каждое из ведущих колес снабжено отдельным электромотором и механической коробкой передач. В устройстве могут быть применены различные типы электромоторов в зависимости от используемого источника питания и требуемых характеристик. В качестве источника питания транспортное средство может содержать турбинный электрогенератор и электробатареи. Движение описанного транспортного средства предполагает сложную систему управления, и синхронизации электромоторов, и переключений в коробке передач.
Примеры других вариантов исполнения передаточных механизмов и систем управления электромоторами и трансмиссией в полноприводных транспортных средствах описаны в патентных заявках US 2003/0019674, US 2003/0234124, US 2004/0176203.
Известные полноприводные транспортные средства используют для передачи вращающего момента от электромотора на колесо механический привод, а для изменения скорости движения механические коробки передач. Все это приводит к усложнению конструкции и трудностям в создании надежной системы управления, и синхронизации отдельных двигателей, и управления движением транспортного средства в целом.
Из уровня техники известны безредукторные мотор-колеса, у которых вращение колеса вызывается непосредственно электромагнитным взаимодействием магнитных систем ротора и статора. Такие электродвигатели являются перспективными для использования в транспортных средствах, поскольку для них не требуется использование механических приводов и коробок передач.
Известен встроенный электродвигатель (WO 93/08999 А1, 13.05.93), содержащий две основные части: неподвижный статор, закрепленный на оси и имеющий магнитопровод с постоянными магнитами, размещенными равномерно; и подвижный ротор, несущий обод и содержащий, по крайней мере, две группы электромагнитов, а также распределительный коллектор, закрепленный на статоре и имеющий токопроводящие пластины, соединенные с источником постоянного тока. На роторе закреплены токосъемники, имеющие электрический контакт с пластинами распределительного коллектора.
Указанное мотор-колесо имеет различные модификации и варианты исполнения (US 6384496 B1, 07.05.2002; US 6617746 B1, 09.09.2003; RU 2129965 C1, 10.05.1999; RU 2172261 C1, 20.08.2001). К преимуществам такого устройства относятся: отсутствие редуктора, использование низковольтных источников питания, отсутствие дополнительных электронных схем, возможность рекуперции энергии, небольшие габариты и вес. Комбинирование основных элементов мотор-колеса в сочетании с дополнительными устройствами позволяет создавать аналогичные по принципу работы и обладающие указанными преимуществами мотор-колеса.
Однако описанное мотор-колесо и его разновидности имеют ряд недостатков, главный из которых заключается в необходимости больших пусковых и переходных токов при трогании и ускорении транспортного средства. Это приводит к быстрому износу и порче аккумуляторов и ухудшению теплового режима. Другим недостатком является недостаточно эффективное использование и возврат электроэнергии. Также названные электродвигатели имеют низкий крутящий момент, что существенно ограничивает область их практического использования.
Известно мотор-колесо, выполненное по резонансной схеме (WO 2004/091957 А1, 28.10.2004), у которого указанные недостатки в значительной мере минимизированы. Указанный электродвигатель содержит четное число электромагнитов, расположенных попарно, напротив друг друга, причем выводы обмоток противоположных электромагнитов шунтированы конденсаторами с образованием резонансных контуров.
Количество постоянных магнитов статора, равное n, и количество резонансных контуров, равное m, подбирают таким образом, чтобы они удовлетворяли соотношениям: n=10+4k, m=2+k где k - целое число, принимающее значения 0, 1, 2, 3 и т.д. Такое соотношение числа электромагнитов и постоянных магнитов, их взаиморасположение и используемая схема коммутации электромагнитов обеспечивает резонанс токов, текущих через обмотки диаметрально противоположных электромагнитов, и, как следствие, уменьшает скачки напряжения (электропотребление) при трогание и разгоне электродвигателя и улучшает его динамические характеристики.
Однако поскольку резонанс токов происходит только при определенной частоте вращения электродвигателя, то оптимальным будет движение транспортного средства с некоторой наперед заданной скоростью (или в некотором диапазоне скоростей).
Настоящее изобретение направлено на создание экономичного полноприводного транспортного средства, обладающего высокими динамическими характеристиками и относительно простой схемой управления электродвигателями.
Полноприводное транспортное средство, выполненное в соответствии с настоящим изобретением, содержит, по крайней мере, два безредукторных электромотора, источник электропитания и блок управления питанием электромоторов. По крайней мере, один из этих электромоторов будут являться разгонным, а другой - маршевым. Каждый из названных электромоторов содержит:
по крайней мере, один круговой магнитопровод, на котором закреплено четное количество постоянных магнитов с одинаковым шагом;
круговую раму, отделенную от магнитопровода воздушным промежутком и несущую четное число электромагнитов, расположенных попарно, напротив друг друга;
средство переключения полярности питания электромагнитов. Каждая пара электромагнитов, расположенных напротив друг друга, образует фазу электромотора, причем количество фаз (пар диаметрально противоположных электромагнитов) m1 разгонного электромотора и количество фаз (пар диаметрально противоположных электромагнитов) m2 маршевого электромотора удовлетворяет соотношению m1>m2. Также предпочтительно, чтобы количество постоянных магнитов n1 разгонного электромотора и количество постоянных магнитов n2 маршевого электромотора удовлетворяли соотношению n1>n2. Блок управления питанием электромоторов имеет возможность подавать питание на каждый из электромоторов независимо.
Указанные электромоторы могут быть выполнены по коллекторной или бесколлекторной схеме, или один из моторов выполняется по коллекторной, а другой по бесколлекторной схеме.
В коллекторной схеме обычно магнитопровод электромотора расположен на статоре, круговая рама с электромагнитами расположена на роторе. Средство переключения полярности питания электромагнитов содержит:
распределительный коллектор, закрепленный на корпусе статора и имеющий расположенные по окружности токопроводящие пластины, и токосъемники, установленные с возможностью контакта с пластинами коллектора и подключенные к электромагнитам. Пластины коллектора, разделенные диэлектрическими промежутками, соединены с чередованием полярности с источником электропитания.
Для электромотора, имеющего постоянное направление вращения, положительные токопроводящие пластины распределительного коллектора соединены с положительным полюсом источника постоянного тока, а отрицательные токопроводящие пластины распределительного коллектора замкнуты на корпус электродвигателя.
Для реверсивного электромотора положительные токопроводящие пластины распределительного коллектора соединены с положительным полюсом источника постоянного тока, а отрицательные токопроводящие пластины распределительного коллектора соединены с отрицательным полюсом источника постоянного тока и изолированы от корпуса электродвигателя. Способ подключения определяется назначением конкретного электромотора в полноприводном транспортном средстве.
В бесколлекторной схеме магнитопровод расположен на роторе, круговая рама с электромагнитами расположена на статоре; и средство переключения полярности питания электромагнитов осуществляет коммутацию катушек электромагнитов электронным способом по сигналам датчика положения ротора (ДПР).
Вне зависимости от схемы исполнения средства переключения полярности питания электромагнитов предпочтительно, чтобы для каждого электродвигателя электромагниты имели по две катушки с последовательно встречным направлением обмотки, причем обмотки катушек смежных электромагнитов были бы соединены последовательно, а одноименные выводы обмоток противоположных электромагнитов были соединены между собой. При этом количество постоянных магнитов, равное n, должно удовлетворять соотношению
n=10+4k, где k - целое число, принимающее значения 0, 1, 2, 3 и т.д.
Количество пар электромагнитов m должно удовлетворять соотношению m=2+L, где L - любое целое число, удовлетворяющее условию 0≤L≤k.
Ротор электромотора может быть расположен как внутри статора, так и с внешней стороны статора, в зависимости от конструктивных особенностей полноприводного транспортного средства.
При крейсерском ходе разгонный электромотор (имеющий большее число фаз) может быть использован в качестве электрогенератора для рекуперации электроэнергии. В этом случае источник питания обычно содержит два комплекта батарей, имеющих возможность включаться попеременно. Один комплект батарей работает для питания маршевого электромотора, другой заряжается от электромотора, работающего как электрогенератор, затем идет переключение по сигналу об уровне разряда первого комплекта батарей. Поскольку импульсно-инерционные двигатели являются высокоэкономичными низковольтными двигателями (напряжение питания 48-72 В), то двойной комплект батарей транспортного средства, выполненного в соответствии с настоящим изобретением, будет соответствовать стандартному комплекту батарей (120-150 В) современного электромобиля и не займет дополнительного места.
Кроме того, полноприводное транспортное средство может также дополнительно содержать электрогенератор, работающий на органическом топливе. Такой электрогенератор может как непосредственно запитывать электромоторы, так и подзаряжать электрические аккумуляторы (батареи).
Сущность изобретения поясняется следующими чертежами:
фиг.1 - общая схема полноприводного транспортного средства;
фиг.2, 3, 4, 5 - различные варианты выполнения мотор-колеса в качестве разгонного и/или маршевого двигателя;
фиг.6 - электрическая схема выполнения дифференциала;
фиг.7 - принципиальная схема электромотоцикла, выполненного в соответствии с настоящим изобретением;
фиг.8 - временная диаграмма, показывающая изменение тока в цепи электромоторов, при разгоне и движении транспортного средства.
На фиг.1 представлена общая схема полноприводного транспортного средства (электромобиля), выполненного в соответствии с настоящим изобретением. Названный электромобиль содержит четыре безредукторных электромотора 1, 2, 3 и 4, причем электромоторы, расположенные на одной оси 1 и 2 (M1), и моторы, расположенные на другой оси, 3 и 4 (М2), являются идентичными. На представленной схеме моторы 3 и 4 являются разгонными и имеют реверсивную схему подключения электропитания. Моторы 1 и 2 являются маршевыми. Электромобиль также содержит источник 5 электропитания и блок 6 управления (контроллер). Источник электропитания обычно включает два комплекта батарей 7, имеющих возможность включаться попеременно, каждый из которых рассчитан на питание всех электродвигателей. Поскольку в настоящем изобретении используются низковольтные высокоэкономичные двигатели, рассчитанные на напряжение питания 48-72 В, то двойной комплект батарей описываемого электромобиля будет соответствовать стандартному комплекту батарей (120-150 В) современного электромобиля и не займет дополнительного места. Дополнительно источник 5 электропитания может содержать электрогенератор 8, работающий на органическом топливе. Наличие такого генератора позволяет увеличить длину пробега и автономность электромобиля. Электрогенератор будет подзаряжать один комплект батарей В2 в то время, когда питание электромоторов осуществляется от другого комплекта батарей В1.
Электромобиль также содержит средства 9 поворота колес и блок 10 выпрямления тока, включающийся в режиме работы разгонного электродвигателя, как электрогенератора. Переключение электрических цепей, выбор скоростного режима и управление транспортным средством осуществляют через контроллер 6. Причем ряд функций может осуществляться как в ручном, так и в автоматическом режиме. Контроллер осуществляет управление по сигналу соответствующих датчиков о величине скорости 11 (или частоте вращения электродвигателей), величине тока 12 в электрических цепях, угле поворота 13 и т.д. Поскольку у представленного электромобиля двигатели расположены непосредственно в колесе и отсутствует сложная схема редукции, этот электромобиль обладает высокой маневренностью и практически нулевым радиусом поворота.
Каждый из моторов, транспортного средства, выполненного в соответствии с настоящим изобретением, является мотор-колесом и содержит:
по крайней мере, один круговой магнитопровод, на котором закреплено четное количество постоянных магнитов с одинаковым шагом;
круговую раму, отделенную от магнитопровода воздушным промежутком и несущую четное число электромагнитов, расположенных попарно, напротив друг друга;
средство переключения полярности питания электромагнитов. При этом могут быть использованы различные варианты конструкций электродвигателей: щеточный импульсно-инерционный электродвигатель (фиг.2); бесколлекторный импульсно-инерционный электродвигатель (фиг.3), квадроэлектродвигатель (фиг.4), электродвигатель (фиг.5) и т.д.
Существенным является требование, чтобы количество фаз m1 одного электромотора (или нескольких идентичных электромоторов, расположенных на одной оси) и количество фаз m2 другого электромотора (или соответственно нескольких идентичных электромоторов) удовлетворяли соотношению m1>m2. Здесь под фазой подразумевается пара диаметрально противоположных электромагнитов. Мотор, имеющий количество фаз m1, является разгонным, и будет использоваться при наборе транспортным средством скорости от 0 до 40-60 км/ч. Мотор, имеющий количество фаз m2, является маршевым и обеспечивает движение транспортного средства со скоростью 50-120 км/ч. Предпочтительно, чтобы количество постоянных магнитов n1 разгонного электромотора и количество постоянных магнитов n2 маршевого электромотора удовлетворяли соотношению n1>n2.
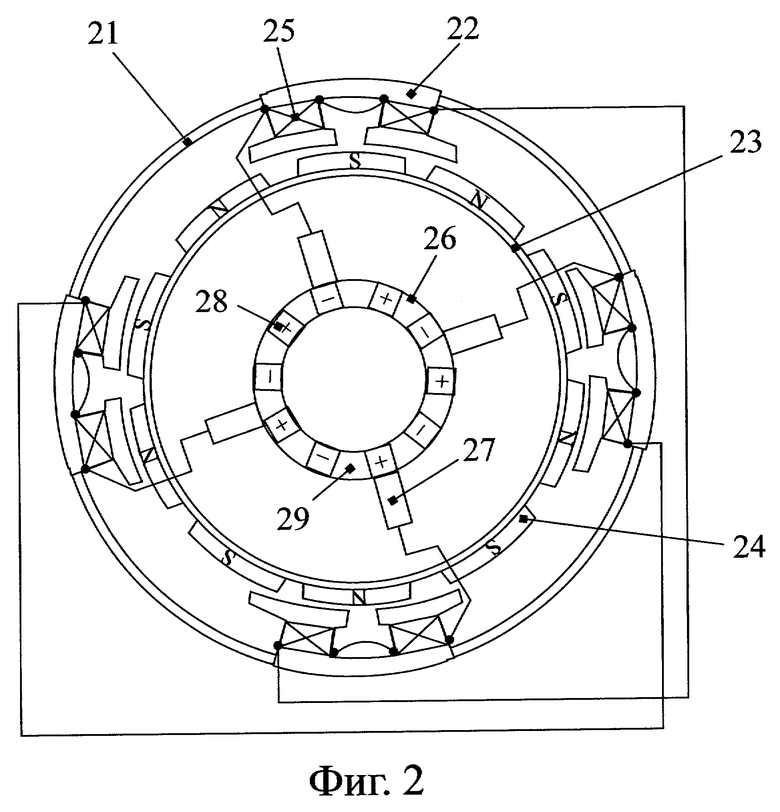
На фиг.2 представлен импульсно-инерционный электродвигатель, который может быть использован в представленном транспортном средстве. Электродвигатель содержит ротор, включающий круговую раму 21, несущую четное число электромагнитов 22. В данном случае 4 электромагнита (две фазы). Статор электродвигателя расположен внутри ротора и содержит круговой магнитопровод 23, на котором закреплено четное количество постоянных магнитов 24 с одинаковым шагом и чередующейся полярностью. В данном случае десять магнитов. Ротор отделен от статора воздушным промежутком. Электромагниты расположены попарно напротив друг друга, каждый из указанных электромагнитов имеет по две катушки 25 с последовательно встречным направлением обмотки (то есть если одна из катушек намотана по часовой стрелке, то другая против часовой). Между собой катушки одного электромагнита соединены последовательно, конец обмотки первой катушки электромагнита соединен с началом обмотки второй катушки электромагнита.
При работе электродвигателя катушки 25 электромагнитов 22 запитываются от источника постоянного тока (не показан) через распределительный коллектор 26 и токосъемники 27. Распределительный коллектор 26 неподвижен относительно статора, а токосъемники 27 связаны с ротором и при его вращении перемещаются относительно токоведущих пластин 28. Указанные пластины соединены с чередованием полярности с постоянным источником тока и разделены диэлектрическими промежутками 29. Количество пластин в распределительном коллекторе соответствует числу постоянных магнитов статора и в данном случае равно десяти.
Каждый из токосъемников 27 подключен к одноименным выводам обмоток одного из электромагнитов 22. Между собой электромагниты 22 соединены по следующей схеме:
обмотки катушек смежных электромагнитов соединены последовательно, а выводы обмоток противоположных электромагнитов, не подключенные к токосъемникам, соединены между собой.
Общее число постоянных магнитов статора n, равное десяти, и количество электромагнитов m, равное четырем, удовлетворяют соотношениям
n=10+4k,
m=4+2L, где k=L=0.
Принцип действия электродвигателя аналогичен традиционному электродвигателю постоянного тока и основан на силах электромагнитного притяжения и отталкивания, возникающих при взаимодействии электромагнитов 22 ротора и постоянных магнитов 24 статора. При прохождении электромагнитом положения, когда его ось расположена между осями постоянных магнитов, катушки электромагнита запитаны так, что создают магнитный полюс, противоположный полюсу последующего в направлении вращения постоянного магнита и одноименный с полюсом предыдущего постоянного магнита. Таким образом, электромагнит одновременно отталкивается от предыдущего и притягивается к последующему постоянному магниту. При прохождении электромагнитом положения напротив оси постоянного магнита он обесточен, поскольку токосъемник располагается напротив диэлектрического промежутка. Это положение электромагнит проходит по инерции. Преимущества настоящего электродвигателя заключаются в строго определенном соотношении числа электромагнитов и постоянных магнитов и их взаиморасположении, а также в используемой схеме коммутации электромагнитов.
При механическом вращении ротора вышеописанный электродвигатель может работать как электрогенератор; причем эффективность генерации будет тем выше, чем больше количество фаз. Обычно для разгонного двигателя количество фаз более 10.
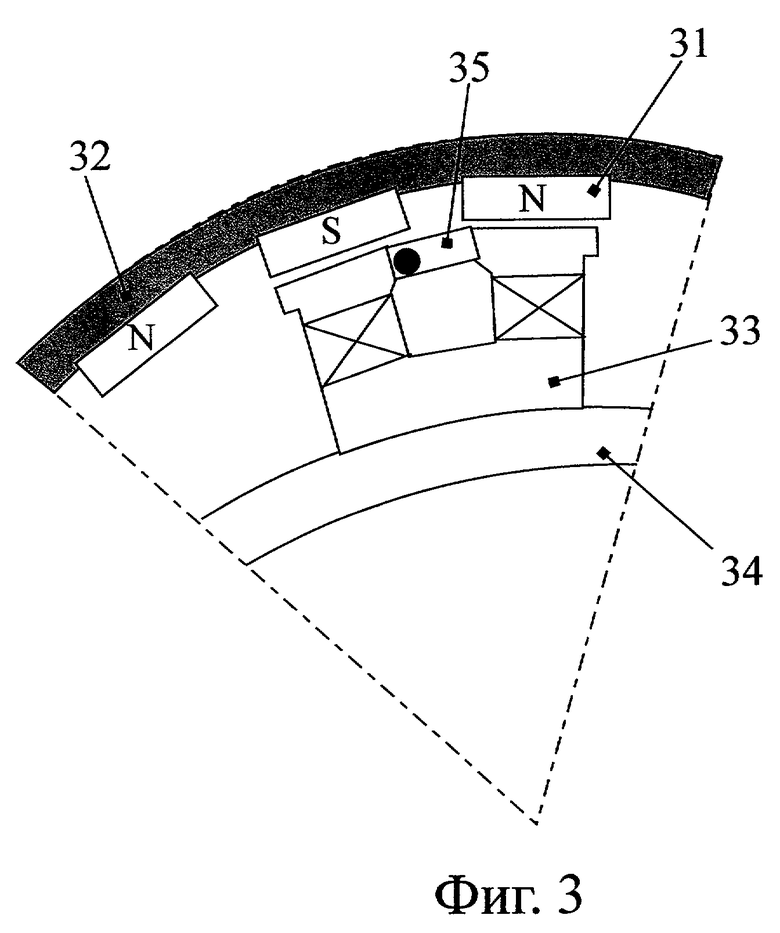
При бесколлекторном варианте исполнения импульсно-инерционного электромотора (фиг.3) постоянные магниты 31 расположены на роторе 32, а электромагниты 33 - на статоре 34. Конструктивное исполнение электромагнитов и способ их коммутации аналогичен описанному выше. Электродвигатель содержит также датчик углового положения 35 (ДПР). ДПР подает сигнал на электронную схему (не показана), которая переключает полярность питания катушек электромагнитов при прохождении мимо них постоянного магнита соответствующей полярности. Работа электродвигателя осуществляется аналогично щеточному варианту исполнения.
Описанные варианты импульсно-инерционных электродвигателей могут быть использованы как в качестве разгонного, так и маршевого электродвигателя, в зависимости от количества фаз и количества постоянных магнитов.
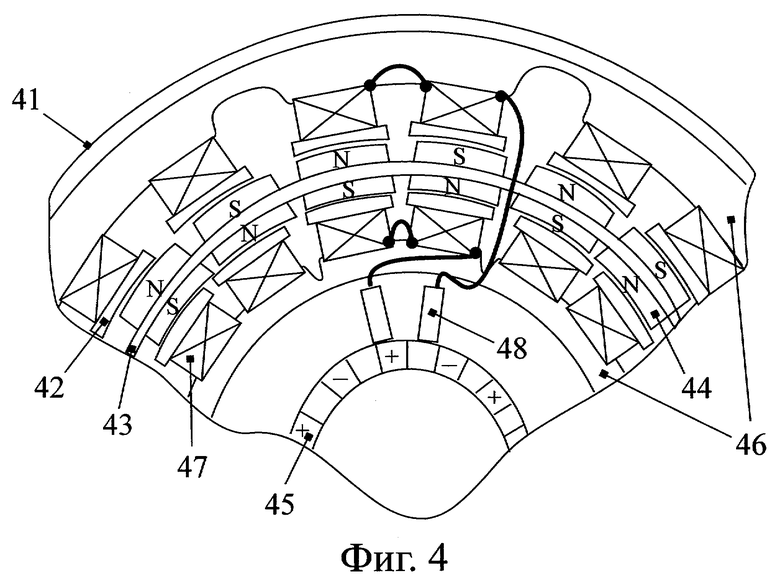
На фиг.4 представлен щеточный квадродвигатель, включающий ротор 41 с электромагнитами 42, статор 43, на котором расположены постоянные магниты 44, и распределительный коллектор 45 с токосъемником 46.
Статор содержит двойной кольцевой магнитопровод 43, на котором закреплены равноудаленные по окружности и чередующиеся по полярности постоянные магниты 42. Причем на внешнем магнитопроводе постоянные магниты обращены наружу, а на внутреннем - вовнутрь.
Ротор 41 включает П-образную круговую раму 46, несущую четное число электромагнитов 42, расположенных попарно напротив друг друга. Каждый из указанных электромагнитов (квадроэлектромагнитов) имеет по четыре катушки 47, расположенные попарно напротив друг друга. Конструктивно электромагниты выполнены так, что при вращении ротора кольцевой магнитопровод с постоянными магнитами находится все время между указанными катушками 47. Четыре катушки каждого электромагнита имеют последовательно-встречное направление обмотки. Выводы квадроэлектромагнитов соединены с соответствующими парами токосъемников 48, установленных по осевым линиям квадроэлектромагнитов. Токосъемники сдвинуты относительно друг друга на угол, равный углу смещения квадроэлектромагнитов. В распределительном коллекторе 45 количество токопроводящих пластин равно количеству постоянных магнитов 44 на каждой стороне магнитопровода 43, при этом токопроводящие пластины разделены диэлектрическими промежутками. Работа электродвигателя основана на взаимодействии сил притяжения и отталкивания электромагнитов ротора с постоянными магнитами статора. В моменты совмещения осевых линий полюсов квадроэлектромагнитов 42 с осевыми линиями постоянных магнитов 44 происходит перекоммутация катушек 47 электромагнита через токосъемники 46 так, что все четыре полюса электромагнита оказываются одноименными с четырьмя полюсами магнитов статора. Это приводит к отталкиванию и одновременному притягиванию к последующим постоянным магнитам иной полярности. Такой электродвигатель может развивать большую мощность и не боится токовых перегрузок. Наиболее оптимально использование квадроэлектродвигателя в качестве разгонного.
Другой электродвигатель (фиг.5) также содержит ротор 51, несущий четное число электромагнитов 52. Статор 53 электродвигателя расположен внутри ротора и содержит два кольцевых магнитопровода 54 и 55, расположенные рядом друг с другом. На каждом из названных магнитопроводов закреплено одинаковое четное количество постоянных магнитов 56 с одинаковым шагом и чередующейся полярностью.
Электромагниты 52 расположены попарно напротив друг друга, каждый из указанных электромагнитов имеет по две катушки 57 с последовательно встречным направлением обмотки. Катушки расположены так, что одна из них движется вдоль одного магнитопровода 54, а другая вдоль другого магнитопровода 55. Схема коммутации аналогично описанной выше для импульсно-инерционного двигателя (фиг.2).
Такой электромотор является высокоскоростным, и его предпочтительно использовать в качестве маршевого двигателя.
Конструкции электромоторов, которые могут быть использованы в настоящем изобретение, не ограничиваются только вышеописанными вариантами.
В транспортном средстве, выполненном в соответствии с настоящим изобретением, которое содержит два мотор-колеса на, по крайней мере, одной из осей обычно используют электрический дифференциал. Дифференциация электрических моторов предусматривает их последовательное включение, при этом блокирование одного из колес (остановка электромотора) приводит к перераспределению электрического тока в цепи и не вызывает перегрева катушек электромагнитов. Напряжение источника питания должно быть рассчитано на последовательное подключение электромоторов.
Для маршевых электромоторов 61 и 62, расположенных на одной оси, электрическая схема может дополнительно содержать реле, обеспечивающее изменение их подключения к источнику питания с последовательного на параллельное и обратно (фиг.6). Такое подключение может быть использовано для обеспечения режима форсажа на прямых участках трассы. Когда ключ К1 находится в положении 2 и ключ К2 находится в положении 4, электромоторы включены последовательно, что обеспечивает дифференциацию колес. На скоростном участке трассы ключ К1 переключают в положение 1 и ключ К2 - в положение 3, моторы 61 и 62 оказываются включены в цепь источника питания параллельно. Напряжение увеличивается вдвое, что приводит к возрастанию частоты оборотов электромоторов. При необходимости маневрирования ключи К1 и К2 возвращают в исходное положение.
Полноприводное транспортное средство, выполненное в соответствии с настоящим изобретением, может иметь различное конструкционное исполнение и содержать разное количество мотор-колес.
В таблице приведены наиболее типичные примеры использования разгонного и маршевого электромоторов в некоторых видах транспорта. Индексами M1, M2 и М3 обозначены безредукторные импульсно-инерционные электромоторы, содержащие соответственно число фаз m1, m2 и m3; и n1, n2 и n3 - количество постоянных магнитов, причем m1>m2>m3; и n1>n2>n3.
Пример реализации
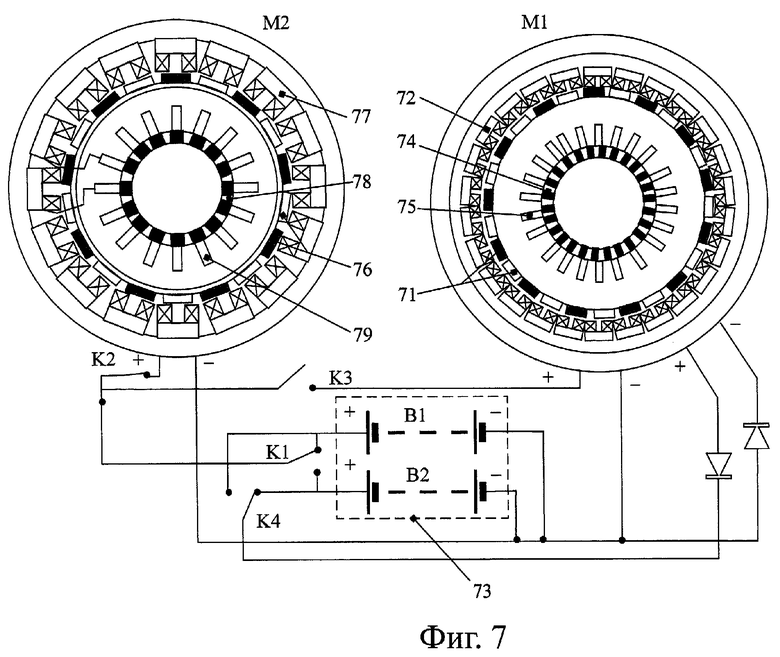
В соответствии с настоящим изобретением был изготовлен полноприводный мотоцикл, оснащенный в качестве мотор-колес импульсно-инерционными двигателями: M1 и М2 (фиг.7).
Разгонный электродвигатель M1 (установленный на заднем колесе) имел 26 постоянных магнитов 71 статора, 12 пар (фаз) двухзубцовых электромагнитов 72 ротора. Катушки электромагнитов 72 запитывались от источника постоянного тока 73 через распределительный коллектор 74 и токосъемники 75. Источник постоянного тока содержал два комплекта батарей В1 и В2, которые могли включаться попеременно, посредством ключа К1. Конструктивное исполнение и схема коммутации аналогична импульсно-инерционному двигателю, описанному выше (фиг.2). Напряжение питания транспортного средства составляло 72 В. Пусковой ток при разгоне составлял величину 25-27 А; средний рабочий ток 12 А. Упомянутый электродвигатель обеспечивал разгон транспортного средства до скорости 50 км/ч за 3-4 секунды, при потребляемой мощности около 900 Вт. После достижения скорости 50 км/ч разгонный двигатель отключался (посредством ключа К3) и включался (посредством ключа К2) маршевый электродвигатель, установленный на переднем колесе. Переключение электродвигателей (аналог переключения скоростей в коробке передач) могло осуществляться как в ручном, так и в автоматическом режиме. В последнем случае управление переключением двигателей осуществлялось по току. На крейсерском ходе мотоцикла разгонный двигатель M1 работал как электрогенератор. Цепь подзарядки батарей включалась посредством ключа К4.
Маршевый электродвигатель М2 имел 18 полюсов постоянных магнитов 76, расположенных на статоре, и 8 пар двухзубцовых электромагнитов 77, расположенных на роторе. Катушки электромагнитов 77 запитывались от источника постоянного тока 73 через распределительный коллектор 78 и токосъемники 79. Скачок тока при пуске маршевого двигателя отсутствовал, поскольку он включался на скорости 50 км/ч; рабочий ток был 10 А. Потребляемая мощность составляла величину около 720 Вт. Крейсерская скорость описанного мотоцикла была 90-100 км/ч.
На фиг.8 представлена временная диаграмма, показывающая изменение тока в цепи электромоторов M1 и М2, при разгоне и движении транспортного средства.
При трогании с места транспортного средства следует скачок величины тока I1, текущего по обмоткам электромагнитов разгонного двигателя M1 (участок графика 0-А). При этом величина тока может достигать 40 А. При выходе двигателя на стационарный режим ток падает до 25-27 А (участок А-В). При достижении скорости около 50 км/ч разгонный двигатель M1 выключается и включается маршевый двигатель М2 (участок В-С). Скачок тока при пуске маршевого двигателя практически отсутствует. После выхода маршевого двигателя на стационарный режим, разгонный двигатель начинает работать как электрогенератор.
При движении транспортного средства на подъеме ток I2, текущий через маршевый двигатель, возрастает и по достижении им определенной величины происходит параллельное включение разгонного двигателя M1 (участок C-D). Ток, текущий через обмотки электромагнитов обоих двигателей, падает (участок D-E). После преодоления подъема транспортное средство выходит на крейсерский режим хода: маршевый двигатель М2 работает в стационарном режиме при величине рабочего тока около 10 А; разгонный двигатель M1 работает как электрогенератор, подзаряжая батареи при величине тока окола 4 А.
Таким образом, заявленное полноприводное транспортное средство обеспечивает экономию электроэнергии (батарей), плавности разгона и высокие динамические характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНО-ИНЕРЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285997C1 |
| ЭЛЕКТРОПРИВОД ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2024 |
|
RU2828907C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ (ВАРИАНТЫ) | 2007 |
|
RU2340994C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2303536C2 |
| МОТОР-ГЕНЕРАТОР С МАГНИТНЫМИ КОНЦЕНТРАТОРАМИ | 2019 |
|
RU2708635C1 |
| ПРИВОДНОЕ УСТРОЙСТВО | 1998 |
|
RU2129965C1 |
| НИЗКОВОЛЬТНЫЙ КВАНТОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2022 |
|
RU2800228C1 |
| МОТОР-КОЛЕСО | 1990 |
|
RU2035115C1 |
| МОТОР-КОЛЕСО | 1991 |
|
RU2038985C1 |
| МОТОР-КОЛЕСО | 1990 |
|
RU2035114C1 |



Изобретение относится к области электроприводных транспортных средств, включая автомобили, мотоциклы, скутеры, электропоезда и т.д. Полноприводное транспортное средство содержит, по крайней мере, два безредукторных электромотора, источник электропитания и блок управления питанием электромоторов. По крайней мере, один из этих электромоторов будет являться разгонным, а другой - маршевым. Каждый из названных электромоторов содержит, крайней мере, один круговой магнитопровод, на котором закреплено четное количество постоянных магнитов с одинаковым шагом, круговую раму, отделенную от магнитопровода воздушным промежутком и несущую четное число электромагнитов, расположенных попарно, напротив друг друга, а также средство переключения полярности питания электромагнитов. Каждая пара электромагнитов, расположенных напротив друг друга, образует фазу электромотора, причем количество фаз m1 разгонного электромотора и количество фаз m2 маршевого электромотора удовлетворяет соотношению m1>m2. Также предпочтительно, чтобы количество постоянных магнитов n1 разгонного электромотора и количество постоянных магнитов n2 маршевого электромотора удовлетворяли соотношению n1>n2. Блок управления питанием электромоторов имеет возможность подавать питание на каждый из электромоторов независимо. Технический результат заключается в улучшении динамических характеристик и упрощении схемы управления электродвигателями. 13 з.п. ф-лы, 8 ил., 1 табл.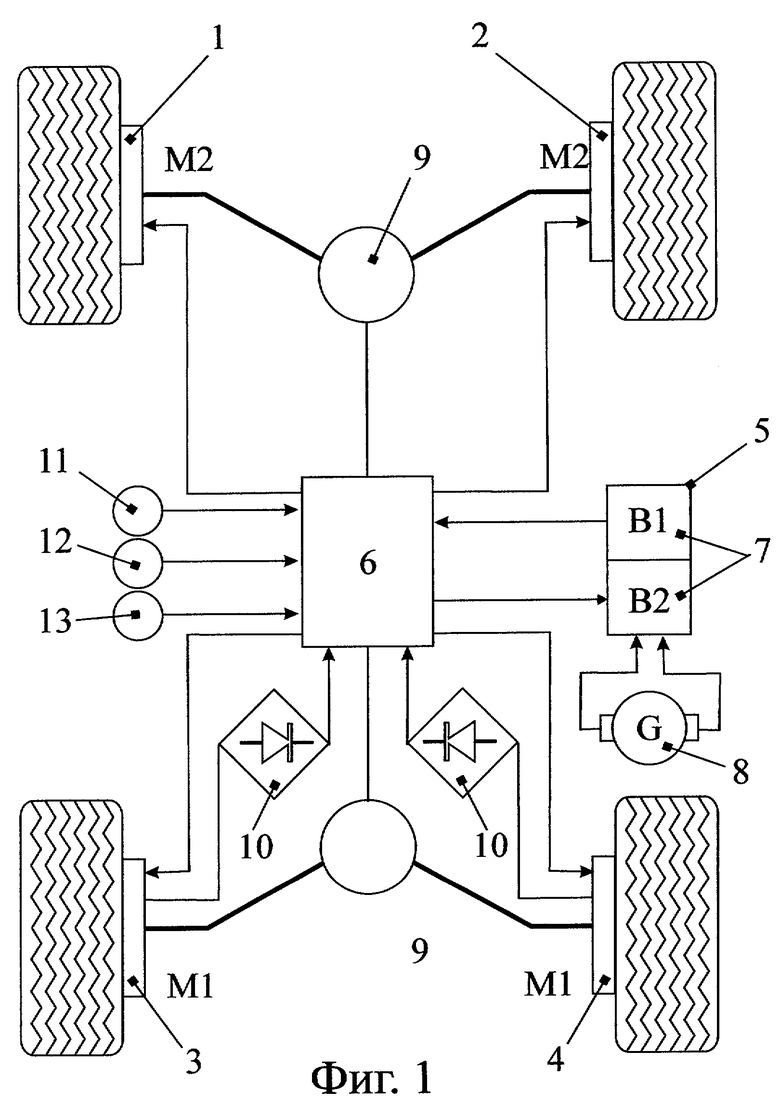
n=10+4k,
где k - целое число, принимающее значения 0, 1, 2, 3 и т.д.
m=2+L,
где L - любое целое число, удовлетворяющее условию 0≤L≤k.
| 0 |
|
SU217226A1 | |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| DE 4011291 A, 17.10.1991. | |||

