Область техники
Настоящее изобретение относится к определению местоположения точечного источника визуализированной утечки газа. В частности, изобретение касается автоматического определения местоположения точечного источника утечки, визуализированной, например, с использованием газового корреляционного фильтра.
Обзор известных технических решений
При использовании систем визуализации для контроля утечек на газоперерабатывающем предприятии существует потребность в быстром и автоматическом определении местоположения источника утечки на территории предприятия, чтобы принять соответствующие меры. Если утечка представляет угрозу безопасности, то предпочтительно выполнить аварийную остановку производства автоматически, без человеческого вмешательства. Если местоположение точечного источника утечки неизвестно, то для борьбы с утечкой должно быть остановлено все предприятие. Очевидно, что экономически целесообразно использовать аварийную остановку только поврежденных подсистем предприятия.
Если решение об аварийной остановке должно приниматься оператором, то полезно преобразовать оптическую информацию, содержащуюся в изображении газа, в схематическую информацию на электронном обзорном плане предприятия.
Большое значение для безопасности и охраны окружающей среды имеет обнаружение утечки газа и ее количественная оценка, с определением ее массового потока. Большинство способов определения массового потока используют предварительную информацию о том, где расположен точечный источник утечки. Иногда, например в случае использования лидара (лазерного локатора инфракрасного диапазона), достаточно знать, что эта точка находится слева или справа от заданного места, но иногда необходимо знать ее точное местоположение. Положение места утечки на изображении газа требуется для автоматического определения массового потока.
Способ, используемый в настоящее время для определения местоположения источника утечки, визуализированного методами визуализации газа, опирается на решение оператора. Человеческий мозг не встречает значительных проблем при определении источника утечки, если располагает информацией о газе, объединенной с визуальной картиной.
Согласно способу, применяемому в настоящее время для поиска утечки без визуализации газа, используют точечные детекторы присутствия газа. Чтобы определить местоположение источника утечки, требуется обходить предприятие с точечными детекторами присутствия газа или наблюдать вторичные эффекты утечки, такие как охлаждение трубы при падении давление газа.
Техника лазерной локации может использоваться для обнаружения утечек и определения их полного массового потока. Определение источников этих утечек обычно занимает недели или месяцы после измерений. Измерения лидаром, требующие использования больших и тяжелых приборов, обычно выполняют только раз в два года, если их вообще используют.
Сущность изобретения
Таким образом, задачей настоящего изобретения является улучшение определения местоположения точечного источника визуализированной утечки газа. Конечная цель этого улучшения состоит в том, чтобы обеспечить автоматическое определение местоположения точечного источника визуализированной утечки газа, используя, например, технику корреляционных газовых фильтров, при минимальном человеческом участии.
Другой задачей настоящего изобретения является предоставление оператору газоперерабатывающего или нефтеперерабатывающего предприятия информации, которая облегчает принятие решений. Такой информацией может быть, например, информация о местоположении точечного источника визуализированной утечки газа относительно физической структуры предприятия, благодаря чему оператору будет легче решить, останавливать ли отдельную подсистему предприятия или все предприятие, чтобы устранить утечку газа.
Для достижения вышеупомянутых целей настоящее изобретение предлагает способ, оборудование, систему контроля и компьютерную программу согласно независимым пунктам формулы изобретения. Предпочтительные формы осуществления изобретения охарактеризованы в зависимых пунктах формулы изобретения.
На чертежах и в подробном описании изобретения показаны и описаны главным образом только предпочтительные формы осуществления изобретения. Как будет понятно специалистам в данной области техники, изобретение может иметь другие формы осуществления, и некоторые детали могут подвергаться изменениям в различных отношениях без отступления от концепции изобретения. Соответственно, чертежи и подробное описание должны рассматриваться только как имеющие иллюстративный характер и не предназначенные для ограничения объема настоящего изобретения.
Перечень чертежей
Настоящее изобретение будет описано со ссылкой на приложенные чертежи, на которых:
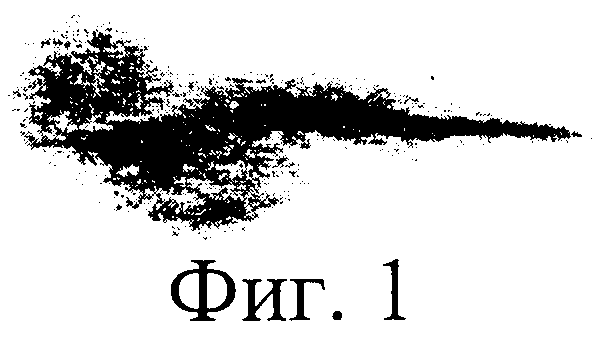
на фиг.1 показано изображение, полученное усреднением ряда кадров по времени;
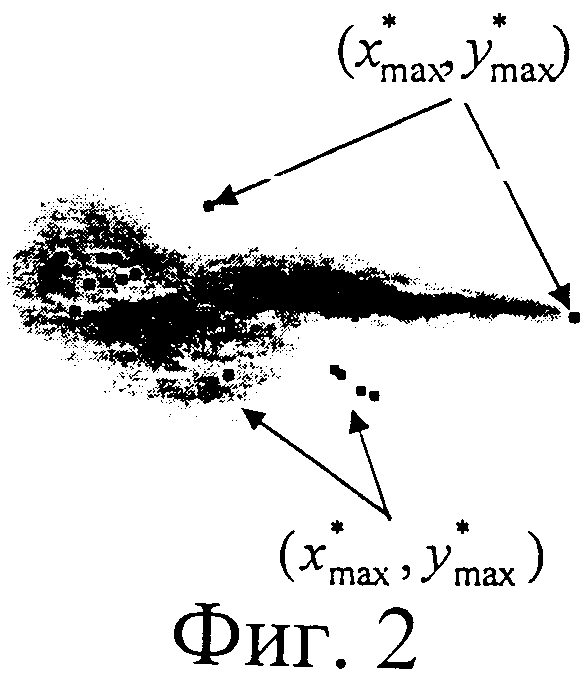
на фиг.2 показано изображение фиг.1 с обнаруженным местоположением всех локальных максимумов функции отклика угла;
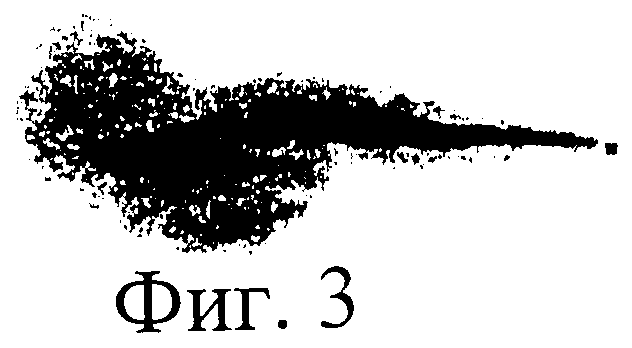
на фиг.3 показано изображение фиг.2, на котором удалены все точки, имеющие отклик угла, в заданное число раз меньший, чем наибольший отклик угла;
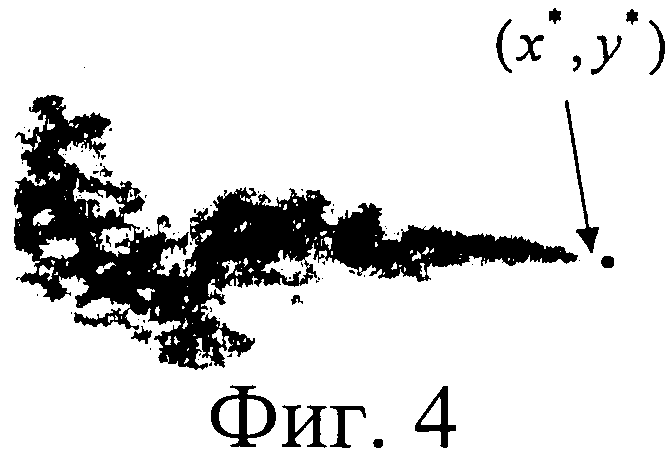
на фиг.4 показано изображение фиг.3, на котором удалены все точки, неустойчивые во времени;
на фиг.5 показана форма выполнения оборудования для определения местоположения точечного источника с использованием корреляционного газового фильтра и двойной телескопической оптической системы;
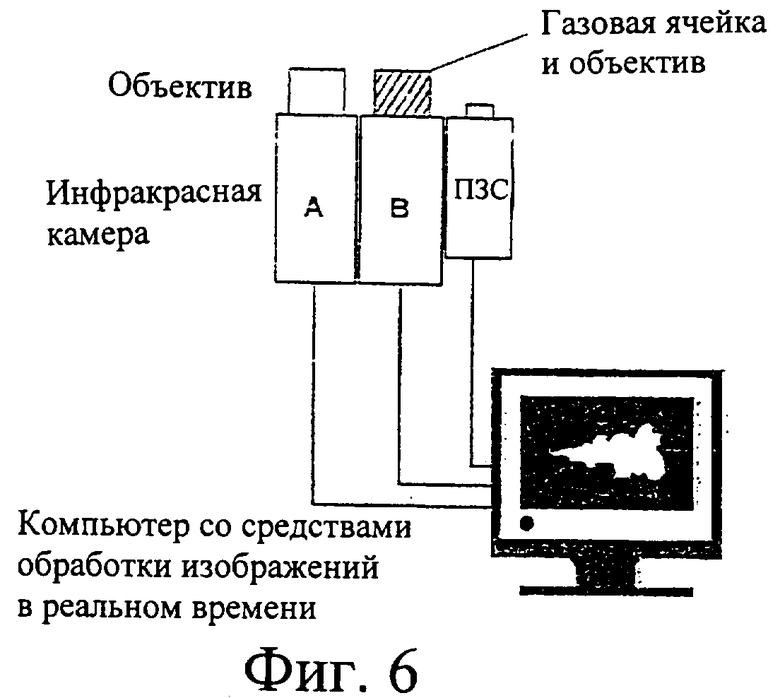
на фиг.6 показана форма выполнения оборудования для определения местоположения точечного источника с использованием корреляционного газового фильтра и двух инфракрасных камер, в одной из которых газовая ячейка и объектив установлены вместе;
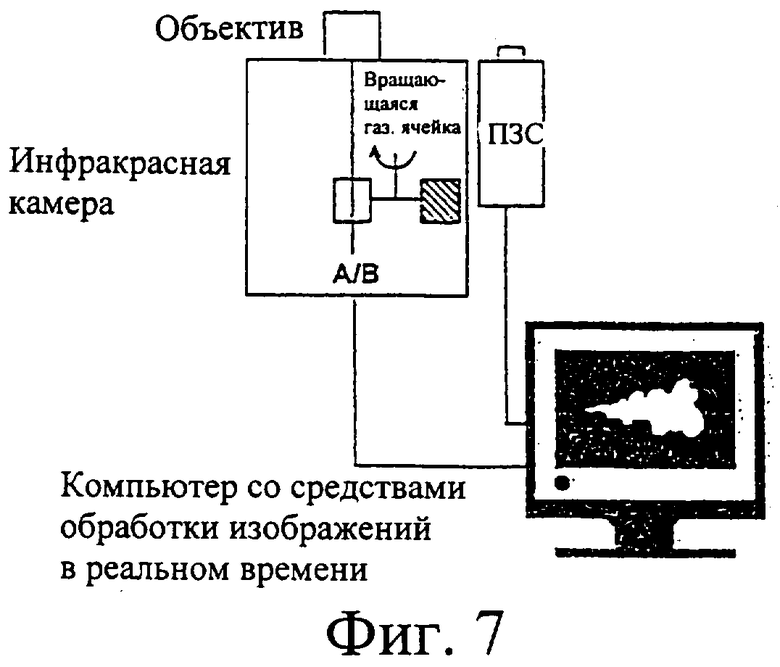
на фиг.7 показана форма выполнения оборудования для определения местоположения точечного источника с использованием корреляционного газового фильтра с расщепителем луча в инфракрасной камере. Газовая ячейка расположена перед приемником В;
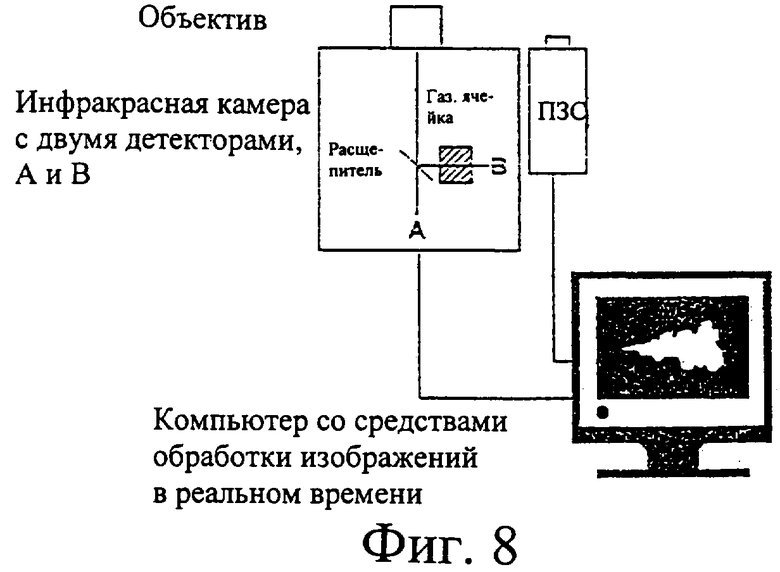
на фиг.8 показана форма выполнения оборудования для определения местоположения точечного источника с использованием корреляционного газового фильтра, где газовая ячейка установлена на обтюраторе в инфракрасной камере. Изображения последовательно фиксируются одним детектором.
Подробное описание изобретения
Таким образом, изобретение относится к определению местоположения одного или нескольких точечных источников визуализированной утечки газа. В частности, изобретение относится к автоматическому определению местоположения одного или нескольких точечных источников визуализированной утечки газа с использованием, например, корреляционного газового фильтра.
Изобретение опирается на ряд физических свойств утечек газа. Из них самыми важными являются турбулентная структура газа на различных расстояниях от источника газа и неподвижное положение источника утечки газа в пространстве. Используется также возникновение сильного градиента концентрации, который на изображениях газа около источника утечки характеризуется структурой, похожей на угол.
Распределение концентрации газа является четырехмерной функцией времени и пространства. Методы визуализации газа проецируют эту функцию на трехмерную функцию интегрированием по одной из пространственных координат или, более точно, интегрированием вдоль линий, соответствующих одной и той же точке в проективном преобразовании. В этом описании трехмерная функция распределения газа обозначена как g(x, y, t). Точечные источники представляют собой структуры, которые имеют стабильность по всем трем координатам. Здесь координаты х и y относятся к системе координат, независимой от вращения и сдвига камеры.
В целом, настоящее изобретение можно рассматривать как поиск для функции отклика угла crf(х*, y*, τ), вычисляемой на основе ряда кадров изображения утечки газа, максимальных значений функции для переменных (х*, y*), которые не перемещаются при изменении переменной времени τ, то есть устойчивы в течение какого-то времени, при этом точка (х*, y*) считается точечным источником, если функция отклика угла crf(x*, y*, τ) имеет в точке (х*, y*) максимальное значение и эта точка (х*, y*) устойчива во времени.
Более конкретно, определение местоположения источника утечки согласно одной из форм осуществления изобретения достигается с помощью четырех основных этапов, а именно: 1) усреднения во времени посредством определения частного интеграла по координате времени, то есть вычислением временного среднего для ряда кадров из зарегистрированного ряда изображений газа, 2) определения местоположений точек возможных источников путем вычисления функции отклика угла (crf) для усредненного по времени изображения, 3) определения одной или нескольких точек локальных максимумов функции отклика угла (crf), эти точки локальных максимумов рассматриваются в качестве возможных точек утечки, и 4) определения устойчивости этих возможных точек утечки во времени. Ниже эти четыре этапа будут описаны более подробно.
Первым этапом способа определения местоположения точечного источника визуализированной утечки газа является вычисление усредненного по времени изображения для ряда кадров из множества изображений концентрации газа, которые зарегистрированы последовательно во времени посредством устройства для формирования изображения распределения газа, использующего оптические методы. А именно, усредненное по времени изображение получают из ряда кадров, окружающих тот кадр, в котором должен быть найден источник утечки. Если источник должен быть найден в реальном времени, усредненное изображение должно быть получено из предыдущих кадров. Это усреднение по времени выполняется для того, чтобы уменьшить эффекты турбулентности, которые появляются далеко от источника и значительно изменяются во времени. Более устойчивые структуры вблизи источника газа усиливаются вследствие этой операции. Этот этап является необязательным, но улучшает рабочие характеристики.
Таким образом, первым этапом является усреднение по времени и оно выполняется вычислением частного интеграла по временной координате. Временное среднее обозначается как f(x, y, τ) и определяется как  Усреднение по времени будет сглаживать удаленные от источника пространственные области с большой турбулентностью. Фиг.1 иллюстрирует пример усредненного по времени изображения для ряда кадров; на этом чертеже области струи газа вдали от источника сглажены, а область вблизи источника сохраняет свою форму.
Усреднение по времени будет сглаживать удаленные от источника пространственные области с большой турбулентностью. Фиг.1 иллюстрирует пример усредненного по времени изображения для ряда кадров; на этом чертеже области струи газа вдали от источника сглажены, а область вблизи источника сохраняет свою форму.
В результирующем усредненном по времени изображении с уменьшенной турбулентностью источник газа имеет структуру, похожую на острый угол. Вторым этапом является вычисление функции отклика угла (crf). Все локальные максимумы функции отклика угла (crf) рассматриваются как возможные источники утечки газа и сохраняются в списке кандидатов, хранящемся в запоминающем устройстве.
Таким образом, на втором этапе функция отклика угла вычисляется в пространственных направлениях, чтобы определить местоположение возможных точечных источников. Это осуществляется путем оценки вырожденных ковариационных матриц пространственного градиента f(x, y, τ). Эта матрица определяется как  , где
, где  . Пространственное среднее от m(х, y, τ) вычисляется как
. Пространственное среднее от m(х, y, τ) вычисляется как  , где N(x*, y*) - малая область вокруг точки (х*, y*). Это пространственное среднее может взвешиваться с коэффициентом, зависящим от расстояния до точки (х*, y*). Затем вычисляются собственные значения (λ1(x*, y*, τ), λ2(x*, y*, τ)) для m*(х*, y*, τ) и определяется функция отклика угла
, где N(x*, y*) - малая область вокруг точки (х*, y*). Это пространственное среднее может взвешиваться с коэффициентом, зависящим от расстояния до точки (х*, y*). Затем вычисляются собственные значения (λ1(x*, y*, τ), λ2(x*, y*, τ)) для m*(х*, y*, τ) и определяется функция отклика угла  , где с - константа. Константа с может быть вычислена как (cf+1/cf), где cf - положительное число. Таким образом, константа с больше или равна 2. В идеальном случае при отсутствии структуры, похожей на угол, одно собственное значение равно 0, а другое собственное значение имеет большую величину, что дает в результате отрицательную функцию отклика угла. Угол, в идеальном случае, характеризуется двумя одинаково большими собственными значениями, и тогда функция отклика угла будет тем большей, чем больше константа с. В действительности, даже умеренные углы будут усилены при большом значении константы с.
, где с - константа. Константа с может быть вычислена как (cf+1/cf), где cf - положительное число. Таким образом, константа с больше или равна 2. В идеальном случае при отсутствии структуры, похожей на угол, одно собственное значение равно 0, а другое собственное значение имеет большую величину, что дает в результате отрицательную функцию отклика угла. Угол, в идеальном случае, характеризуется двумя одинаково большими собственными значениями, и тогда функция отклика угла будет тем большей, чем больше константа с. В действительности, даже умеренные углы будут усилены при большом значении константы с.
Если градиент значительно не изменяется, то матрица m*(х*, y*, τ) будет близка к вырожденной с одним собственным значением, близким к нулю, и функция отклика угла crf(x*, y*, τ) будет отрицательной. Однако если градиент изменяется значительно, то матрица будет иметь два собственных значения, отличных от нуля, и при правильно выбранной величине с функция отклика угла crf(x*, y*, τ) будет большой. Чем больше градиент, тем больше будет функция отклика угла crf(x*, y*, τ), так что функция отклика угла crf(x*, y*, τ) будет большой в областях, где среднее по времени f(x, y, τ) имеет большой градиент, который значительно изменяется.
Чтобы можно было обнаружить возможные источники утечки газа без предварительного знания величины утечки, на третьем этапе определяется местоположение самой сильной угловой особенности. Это достигается тем, что список кандидатов сортируется по величине отклика угла и находится самый сильный кандидат. Величина обнаруженного отклика угла является динамической мерой того, насколько большие типичные значения отклика угла имеются в конкретном случае. Порог, основанный на величине отклика угла самого сильного кандидата, используется для того, чтобы удалить возможные источники утечки, имеющие слишком низкую величину отклика угла, то есть всех кандидатов, имеющих в заданное число раз меньшую величину, чем самый сильный отклик угла, удаляют из списка.
Таким образом, на третьем этапе все значения пространственных локальных максимумов функции отклика угла crf(х*, y*, τ) вычисляют для каждого значения времени τ. В полученном наборе точек для каждого τ находят точку  с наибольшим значением функции отклика угла crf(x*, y*, τ). На фиг.2 показано изображение, соответствующее изображению фиг.1. Однако на фиг.2 определены местоположения всех локальных максимумов функции отклика угла, которые показаны как несколько маленьких черных квадратов. Порог, основанный на наибольшем значении отклика угла, используется для удаления некоторых точек из набора. То есть для каждого τ все точки с величиной отклика угла, меньшей, чем
с наибольшим значением функции отклика угла crf(x*, y*, τ). На фиг.2 показано изображение, соответствующее изображению фиг.1. Однако на фиг.2 определены местоположения всех локальных максимумов функции отклика угла, которые показаны как несколько маленьких черных квадратов. Порог, основанный на наибольшем значении отклика угла, используется для удаления некоторых точек из набора. То есть для каждого τ все точки с величиной отклика угла, меньшей, чем  , удаляют. Здесь k - константа от 0 до 1. Полученное в результате изображение показано на фиг.3.
, удаляют. Здесь k - константа от 0 до 1. Полученное в результате изображение показано на фиг.3.
Константа k может быть установлена в зависимости от числа возможных источников утечки, которые хотят получить. Например, если желательно оставить только один возможный источник, должно быть выбрано высокое значение k. Напротив, низкое значение k должно быть выбрано, если необходимо найти все возможные источники, даже если какие-то из них окажутся ложными.
Четвертый этап способа согласно изобретению основан на том, что источник утечки не движется в течение какого-то времени. Исследуется временная стабильность всех возможных источников. Это выполняется путем поиска в списке кандидатов таких возможных источников, которые имели то же самое местоположение в пространстве в ряде предыдущих кадров. Если среди существующих возможных источников некоторая точка достаточно устойчива, то есть за какое-то время ее местоположение не изменяется или изменяется минимально, то она рассматривается как источник утечки. Таким образом, точка, которая является устойчивой при изменении переменной времени τ, представляет собой возможный источник утечки. Для точки  , которая будет сочтена устойчивой по τ, в момент τ1 должна существовать по меньшей мере одна точка в каждом ряду точек между [τ1-Δτ, τ1], которая принадлежит открытому шару
, которая будет сочтена устойчивой по τ, в момент τ1 должна существовать по меньшей мере одна точка в каждом ряду точек между [τ1-Δτ, τ1], которая принадлежит открытому шару  , где r - постоянное расстояние, измеренное с помощью некоторой нормы, например нормы L2, L1 или L∞. Ситуация, когда оставлены только точки, стабильные во времени, показана на фиг.4. Как видно из фиг.4, найдена только одна точка, то есть крайняя справа точка, обозначенная (х*, y*), и поэтому эту точку рассматривают как точечный источник утечки газа.
, где r - постоянное расстояние, измеренное с помощью некоторой нормы, например нормы L2, L1 или L∞. Ситуация, когда оставлены только точки, стабильные во времени, показана на фиг.4. Как видно из фиг.4, найдена только одна точка, то есть крайняя справа точка, обозначенная (х*, y*), и поэтому эту точку рассматривают как точечный источник утечки газа.
Если требование режима реального времени не является жестким, то стабильность точек в течение какого-то времени может быть исследована как для предшествующих, так и для последующих кадров, то есть для кадров, зарегистрированных в моменты времени после кадра, в котором должен быть найден источник, или до него.
Если известна другая априорная информация, эта информация может использоваться для того, чтобы другим способом ранжировать точки в списке кандидатов, включающем найденные точки локальных максимумов. Такой априорной информацией является, например, геометрическая конфигурация предприятия.
Формы осуществления изобретения могут включать также подавление шумов. Изображения концентрации газа при его утечке могут содержать шумы многих различных видов. Некоторая часть шумов может исходить от детектора, то есть от оптического оборудования, формирующего изображения утечки газа, а некоторая - из самой процедуры измерений. Предпочтительно, прежде чем выполнять вычисления для изображений, следует в максимально возможной степени удалить из них шумы. Удаление шумов может быть выполнено на различных этапах. Шум может быть удален, например, путем использования фильтрации с переменным порогом, медианной фильтрации с морфологическими операциями, с помощью фильтра Гаусса и/или фильтра Винера.
Например, изображения могут содержать периодический шум, который проявляется как горизонтальные линии, которые перемещаются вверх и вниз по изображению. Такой шум наиболее вероятно, создается детектором. Так как этот шум не имеет никакого отношения к действительному распределению газа, то, если это возможно, он должен быть удален.
Периодический шум может быть удален путем анализа изображения в Фурье-плоскости и вычисления средней величины абсолютных значений коэффициентов Фурье для последовательности изображений. Явно выраженные пятна высших частот могут присутствовать и на изображениях, содержащих газ, и на изображениях, содержащих только шумы, являясь результатом нежелательных шумов. На некоторых изображениях может быть особо отмечена большая концентрация частот на вертикальной линии, проходящей через начало координат. Эти частоты соответствуют горизонтальным строкам и представляют собой шум, который должен быть устранен.
Чтобы устранить этот шум, частоты, где он существует, могут быть определены путем усреднения многих изображений. Среднее от абсолютного значения в несколько большей области вокруг этих частот было рассчитано для каждого кадра. Частоты шумов могут масштабироваться по этому значению, если они являются большими, чем среднее значение. Этим способом частоты шумов удаляют только тогда, когда они присутствуют и доминируют, и был выбран подходящий уровень восстановления. Это должно причинять как можно меньший ущерб данным полезного сигнала.
Когда на изображениях существует шум, то, если возможно, лучше всего определить физическую причину шума и устранить ее как можно ближе к источнику шума. Это может потребовать замены детектора.
Процедуры измерения могут опираться на тот факт, что имеется разница температур между газом и фоном. Если газ и фон имеют почти одинаковую температуру, тогда полученное значение будет очень зашумленным. Так как инфракрасное изображение, отфильтрованное с помощью газа, может быть видно как тепловое изображение фона, и температура воздуха известна, можно вычислить количество шума в каждом пикселе изображения. Исходя из этого, может быть сформирован переменный порог, который выше в областях, имеющих малую разность температур, и ниже там, где разность является большой.
Даже после того, как был применен переменный порог, на изображении все еще может оставаться шум. Этот шум может быть моделирован как шум типа "соль и перец" (белые и черные точки на изображении), который может быть удален медианным фильтром. Шум типа "соль и перец" является шумом, который дает экстремальные значения пикселов, равные нулю или максимальному значению. Так как медианный фильтр может также искажать форму газовой струи, он предпочтительно используется только для создания маски. Эта маска используется для удаления всего шума вне газовой струи.
Так как интерес представляет большая газовая струя, некоторые морфологические операции выполняются на этой маске, чтобы удалить малые структуры, а также увеличить и "связать" структуру основной струи. Это могут быть некоторые эрозии и дилатации маски. После этого маска прикладывается к изображению, чтобы получить только струю. Так как точно не известно, насколько распространилась газовая струя, эта маска должна быть растянута с небольшим избытком.
Неизвестно, сколько малых структур на изображении являются шумом, а сколько - турбулентностями. Но так как наименьшие турбулентные структуры имеют самое короткое время существования, маловероятно, что они сохранятся между двумя кадрами видеопоследовательности. Это делает эти структуры менее интересными по двум причинам. Прежде чем выполнять любые дальнейшие вычисления, их удаляют. Это выполняется фильтром Гаусса, который сглаживает изображения. Фильтр Гаусса имеет свойство оставлять постоянным общее количество газа на изображении.
Если известны статистические свойства сигнала, то для фильтрации изображений может использоваться также фильтр Винера.
Далее, некоторые формы осуществления изобретения могут также включать пост-фильтрацию, то есть фильтрацию изображения после того, как было определено местоположение точечного источника. Пост-фильтрация может быть желательной. Например, если имеются сотни правильно классифицированных утечек и меньше десяти ошибочных, тогда ошибочные утечки могут быть удалены. Аналогично, если утечка не найдена в нескольких кадрах, но найдена во многих кадрах перед ними и после них, то можно предположить, что утечка существует также и в этих кадрах. После обработки с использованием таких фильтров может быть получена последовательность кадров с источником утечки, правильно классифицированным во всех кадрах, за исключением самых первых, как описано выше. Однако эти виды фильтров не могут использоваться в режиме реального времени.
Должно быть понятно, что описанный способ применим для многих различных масштабов утечки газа. Некоторые ограничения, однако, могут изменяться для случаев различных величин утечки. Например, при сравнении двух структур число пикселов, достаточное для того, чтобы рассматривать эти структуры как близкие, может изменяться. Кроме того, одним из путей использовать способ в том виде, как он есть, для различных масштабов утечек, является поиск с использованием гауссовой пирамиды.
Так как все или многие из описанных выше этапов и вычислений могут быть выполнены на компьютере с использованием последовательности цифровых видеокадров, все вычисления должны выполняться в дискретной области. Это может быть осуществлено заменой всех интегралов суммами и всех непрерывных функций - их дискретными аналогами.
Кроме того, настоящее изобретение касается оборудования для автоматизированного определения местоположения точечного источника визуализированной утечки газа. Упомянутое оборудование включает или может подключаться к средствам, которые используют методику визуализации газа и выполняют описанные выше этапы определения местоположения точечного источника визуализированной утечки газа, см. фиг.5-8. Также можно дать ссылку на заявки заявителя WO 01/48459 и ЕР 1257807.
На фиг.5 показана форма выполнения оборудования для определения местоположения точечного источника с использованием корреляционного газового фильтра и двойной телескопической оптической системы. Вытекание газа из установок предприятия контролируется двойной телескопической оптической системой, в которой в один из оптических каналов включена газовая корреляционная ячейка и в которой два изображения помещаются рядом друг с другом в плоскости изображения чувствительной инфракрасной камеры.
Альтернативно, два изображения А и В могут создаваться двумя инфракрасными камерами, установленными вместе, как показано на фиг.6, или же единственной камерой с лучерасщепляющим блоком и газовой корреляционной ячейкой перед одним из двух детекторов в камере, как показано на фиг.7. Другое решение заключается в том, чтобы использовать единственную камеру датчика с газовой корреляционной ячейкой, установленной на обтюраторе перед датчиком, для последовательного ввода изображений А и В, как показано на фиг.8.
Настоящее изобретение относится также к системе контроля (не показана), включающей оборудование для определения местоположения точечного источника визуализированной утечки газа или соединяемой с таким оборудованием. Такой системой может быть, например, система контроля нефтеперерабатывающего или газоперерабатывающего предприятия. Система контроля содержит также средства, которые предоставляют информацию, например, оператору относительно того, какой компонент или подсистема предприятия имеет утечку газа, тем самым улучшая и упрощая принятие решения оператором. Так как оператор получает информацию о местоположении источника утечки газа, привязанную к физической структуре завода, ему будет легко принять соответствующие меры при утечке газа, например решить, остановить ли подсистему завода для замены или ремонта ее компонента или же остановить весь завод.
Однако система контроля может включать средства, обеспечивающие информацию об утечке газа, которая должна быть проанализирована, предпочтительно автоматически, посредством компьютеризированного устройства, связанного с системой контроля или включенного в ее состав. Кроме того, компьютеризированное устройство может конфигурироваться для управления работой нефтеперерабатывающего или газоперерабатывающего предприятия в зависимости от результатов анализа. То есть компьютеризированное устройство может быть конфигурировано так, чтобы автоматически останавливать завод или его часть, если обнаруживается утечка газа.
Хотя изобретение было описано со ссылкой на изображения поглощения в газе, должно быть понятно, что изобретение может быть применено также к изображениям концентрации газа, так как эти два вида изображений сильно связаны.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ И ВИЗУАЛИЗАЦИИ УПРУГОСТИ БИОЛОГИЧЕСКИХ ТКАНЕЙ В РЕАЛЬНОМ ВРЕМЕНИ | 2018 |
|
RU2723753C1 |
| СПОСОБ ВЫЧИСЛЕНИЯ СДВИГА В ДАТЧИКЕ ПЕРЕМЕЩЕНИЯ С ВЫСОКОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ | 2006 |
|
RU2328768C1 |
| УСТРОЙСТВО ПРЕДОБРАБОТКИ КАРТЫ ГЛУБИНЫ СТЕРЕОИЗОБРАЖЕНИЯ | 2013 |
|
RU2535183C1 |
| Разностно-дальномерный способ определения местоположения объектов | 2022 |
|
RU2790347C1 |
| СПОСОБ И УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ ЛОКАЛЬНЫХ ОСОБЕННОСТЕЙ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2535184C2 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ УТЕЧЕК В ТРУБОПРОВОДЕ НА ОСНОВЕ УЛУЧШЕННОЙ ВМД | 2020 |
|
RU2750516C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ЗОН ЛОКАЛИЗАЦИИ ДЕФОРМАЦИИ ПОВЕРХНОСТИ | 2009 |
|
RU2403536C1 |
| Система уменьшения интенсивности рентгеновского излучения | 2013 |
|
RU2660944C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| Способ подавления временного шума сигналов изображений с тепловизионных оптико-электронных систем | 2023 |
|
RU2818667C1 |
Изобретение относится к определению местоположения точечного источника визуализированной утечки газа. Автоматизированное определение местоположения точечного источника визуализированной утечки газа осуществляется посредством поиска у функции отклика угла crf(х*, y*, τ), вычисляемой на основе ряда кадров изображения утечки газа, максимальных значений от переменных (х*, y*), устойчивых по отношению к переменной времени τ. Точка (х*, y*) рассматривается как точечный источник, если функция отклика угла crf(х*, y*, τ) имеет в указанной точке (х*, y*) максимальное значение и эта точка (х*, y*) является устойчивой во времени. Технический результат: улучшение определения местоположения точечного источника визуализированной утечки газа. 4 н. и 9 з.п. ф-лы, 8 ил.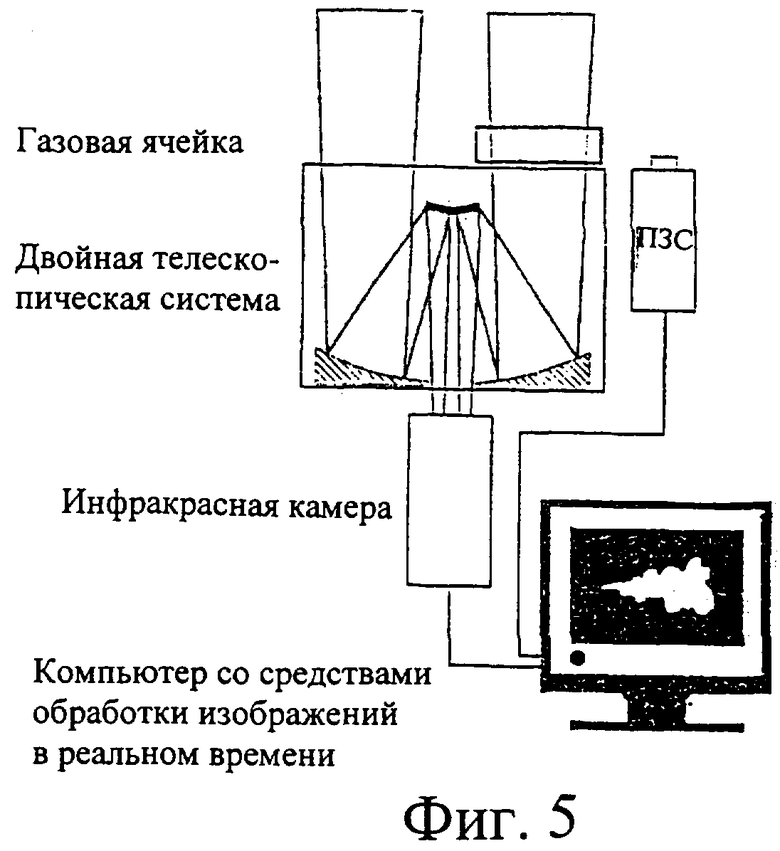
получение ряда кадров изображения указанной утечки газа, разнесенных во времени;
вычисление функции отклика угла (crf) на основе указанного ряда кадров;
определение одной или нескольких точек локальных максимумов функции отклика угла (crf), которые рассматривают в качестве возможных источников утечки, и
определение временной устойчивости указанных возможных источников утечки,
при этом один или несколько из указанных возможных источников, которые являются устойчивыми во времени, рассматривают в качестве указанного точечного источника визуализированной утечки газа.
где g(x, y, t) - трехмерная проекция четырехмерной функции распределения газа во времени и пространстве, чтобы сгладить пространственные области с большой турбулентностью, удаленные от источника утечки.
оценки вырожденных ковариационных матриц пространственного градиента функции f(x, y, τ), при этом матрицу определяют как m=аа*,
вычисления пространственного среднего от m(х, y, τ) как  где N(x*, y*) является малой областью вокруг точки (х*, y*);
где N(x*, y*) является малой областью вокруг точки (х*, y*);
вычисления собственных значений (λ1(x*, y*, τ), λ2(х*, y*, τ)) матрицы m*(х*, y*, τ);
определения функции отклика угла (crf) как crf(x*, y*, τ)=с|λ1λ2|-|λ1 2+λ2 2|, где с - константа, так что функция отклика угла crf(x*, y*, τ) будет иметь большие значения в тех областях, где временное среднее f(x, y, τ) имеет большой градиент, который значительно изменяется.
вычисление всех точек пространственных локальных максимумов функции crf(x*, y*, τ) для каждого значения τ;
поиск точки  с наибольшим значением функции crf(х*, y*, τ) для каждого момента времени τ;
с наибольшим значением функции crf(х*, y*, τ) для каждого момента времени τ;
использование порогового значения, основанного на найденном наибольшем значении функции crf(x*, y*, τ), для удаления точек, имеющих значение отклика угла, меньшее, чем  где k - константа в диапазоне от 0 до 1.
где k - константа в диапазоне от 0 до 1.
определение того, как точка  изменяется в зависимости от переменной τ;
изменяется в зависимости от переменной τ;
определение точки  в качестве устойчивой по отношению к переменной τ в момент времени τ1, если существует по меньшей мере одна точка в каждом ряду между [τ1-Δτ, τ1], которая принадлежит открытому шару
в качестве устойчивой по отношению к переменной τ в момент времени τ1, если существует по меньшей мере одна точка в каждом ряду между [τ1-Δτ, τ1], которая принадлежит открытому шару  , где r - постоянное расстояние, измеренное с помощью некоторой нормы.
, где r - постоянное расстояние, измеренное с помощью некоторой нормы.
| Способ изготовления рамок для сеток электронных ламп | 1961 |
|
SU148459A1 |
| СПОСОБ ОБНАРУЖЕНИЯ УТЕЧЕК ПРИРОДНОГО ГАЗА ИЗ ТРУБОПРОВОДОВ | 1990 |
|
RU2017138C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ УТЕЧЕК МЕТАНА В ПРОМЫШЛЕННЫХ ГАЗОПРОВОДАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2108597C1 |
| RU 2005298 C1, 30.12.1993. | |||

