Область техники
Настоящее изобретение относится к способу определения положения утечек и, в частности, к способу многопозиционного определения положения утечек на основе улучшенной вариационной модовой декомпозиции (ВМД).
Описание связанного уровня техники
Городские трубопроводы стали необходимым инструментом для развития современных городов. С непрерывным увеличением масштаба городских трубопроводов, количество случаев отказа трубопроводов также увеличивается из-за таких воздействий, как естественное старение устройства, климат, окружающая среда и вызванное человеком повреждение. В частности, когда в газовом трубопроводе возникает утечка, это легко вызывает серьезные аварии, такие как пожар, взрыв, отравление и загрязнение окружающей среды. Таким образом, способ эффективного определения небольшой утечки в трубопроводе на ранней стадии и точного обнаружения место утечки имеет важное экономическое и общественное значение.
В последние годы с развитием компьютерных технологий технология определения утечки в трубопроводе развивается в направлении объединения программного и аппаратного обеспечения. Различные новые способы определения утечки в трубопроводе все еще остаются передовым исследовательским направлением в различных странах, а анализ и исследования нестационарных сигналов всегда являются проблемными местами исследований, например, декомпозиция по вейвлетам, эмпирическая модовая декомпозиция (ЭМД) и декомпозиция локального среднего значения (ДЛСЗ). Однако они также имеют свои собственные недостатки. Например, в декомпозиции по вейвлетам нельзя проводить адаптивный отбор, а ЭМД и ДЛСЗ являются способами адаптивного частотно-временного анализа, но оба имеют проблемы, такие как модальное наложение, сверх-огибающая и суб-огибающая. Вариационная модовая декомпозиция (ВМД) является новым адаптивным способом диагностики неисправностей, предложенным Dragomiretskiy и др. в 2014 г. По сравнению со способами ЭМД и ДЛСЗ, способ ВМД имеет преимущества, заключающиеся в прочной теоретической базе, высокой скорости сходимости и очевидных характеристиках результата декомпозиции. ВМД в качестве алгоритма декомпозиции подобен способам ЭМД и ДЛСЗ, и может выполнять декомпозицию сигнала о неисправности согласно высоким и низким частотам на несколько внутренних модовых функций (ВМФ). Однако в ВМД перед выполнением декомпозиции необходимо определить число k уровней декомпозиции. Если число уровней декомпозиции слишком большое, то компоненты после декомпозиции могут содержать ошибку, а если число уровней декомпозиции слишком малое, то компоненты после декомпозиции содержат меньше информации об утечке, что влияет на результат определения положения. Однако в текущих исследованиях, связанных с ВМД, например, «СПОСОБЕ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ УТЕЧЕК НА ОСНОВЕ АНАЛИЗА ЭНТРОПИИ ОТНОСИТЕЛЬНО ВМД-КОМПОНЕНТА», число K уровней декомпозиции определяется по существу согласно опыту человека, что, вероятно, вызывает проблемы, такие как неточная декомпозиция и чрезмерная ошибка определения положения. Таким образом, перед использованием способа ВМД необходимо проводить специальное уменьшение шума сигнала для выбора оптимального параметра K.
Настоящее изобретение создано исходя из таких предпосылок. Перед выполнением ВМД на исходном сигнале об утечке, число декомпозиций ВМД оптимизируют и выбирают путем анализа результата декомпозиций локального среднего по множеству (ДЛСМ) для определения оптимального параметра. В процессе декомпозиции добавляют белый шум для снижения ошибки при восстановлении, и сохраняют компонент с относительно высоким коэффициентом корреляции, тем самым улучшая эффективность декомпозиции. Для оценки сигнала используют способ слепого разделения источников на основе анализа независимых компонентов, и на этом сигнале и исходном сигнале об утечке выполняют расчет взаимной корреляция для того, чтобы в конечном итоге завершить точное многопозиционное определение положения утечек в трубопроводе.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в преодолении проблем, таких как сложное извлечение характеристик сигнала и неточное определение положения, в существующем способе многопозиционного определения положения утечек, а также представление способа многопозиционного определения положения утечек на основе улучшенной ВМД, в котором число уровней декомпозиции в способе ВМД анализируют и выбирают путем расчета коэффициента корреляции каждого компонента результата декомпозиции ДЛСМ, ем самым извлекая сигнал об утечке более эффективно, улучшая точность определения положения утечки, а также повышая реализуемость и достоверность способа.
Техническое решение, внедренное в настоящем изобретении, представляет собой способ определения положения утечек на основе улучшенной ВМД, включающий следующие этапы, на которых:
S1: размещают акустический датчик на детектируемом трубопроводе для сбора исходного сигнала об утечке в трубопроводе;
S2: выполняют ДЛСМ на исходном сигнале об утечке с получением ряда компонентов функции-произведения (ФП);
S3: вычисляют коэффициент корреляции каждого компонента ФП, выбирают эффективный компонент ФП, включающий относительно большое количество информации об исходном сигнале об утечке, выполняют восстановление сигнала согласно выбранному компоненту ФП и выполняют вычисление и анализ согласно коэффициенту корреляции компонента ФП для определения оптимального значения k декомпозиции ВМД;
S4: выполняют ВМД на восстановленном сигнале с получением ряда компонентов ВМФ и выбирают компонент ВМФ путем вычисления многомасштабной энтропии (ММЭ) каждого компонента ВМФ; и
S5: выполняют восстановление сигнала на выбранном компоненте ВМФ с получением наблюдаемого сигнала и получают, путем отделения, сигнал каждой точки утечки путем использования способа слепого разделения источников на основе анализа независимых компонентов (оцененный сигнал об утечке представляет собой оцененный сигнал после слепого разделения источников, исходный сигнал об утечке отделяют путем использования способа слепого разделения источников, и сигнал конкретной точки утечки отличают путем вычисления коэффициента корреляции между оцененным сигналом об утечке и исходным сигналом об утечке, и после отличения получают сигнал каждой точки утечки), и выполняют определение положений утечки в трубопроводе путем использования алгоритма определения положения взаимной корреляцией.
Кроме того, на этапе S2 декомпозицию ДЛСМ выполняют на исходном сигнале об утечке x(t), причем конкретный процесс включает следующие этапы, на которых:
S2.1: определяют число M раз усреднения по множеству и уровень добавленного белого шума, добавляют белый шум nm(t) определенного уровня к сигналу x(t), причем сигнал об утечке представлен как:
xm(t)=x(t)+nm(t) (1),
где m представляет собой число декомпозиций, t представляет собой время, nm(t) представляет собой сигнал белого шума, а xm(t) представляет собой смешанный сигнал об утечке после добавления белого шума;
S2.2: выполняют декомпозицию ДЛСЗ на смешанном сигнале об утечке xm(t) и далее выполняют усреднение по множеству с получением конечного компонента ФП, представленного формулой (2):
 (2),
(2),
где εn.m (n = 1, 2, …, N), N представляет собой положительное целое число, εn.m представляет собой nый исходный компонент ФП, полученный после mой декомпозиции, а средний yn (n = 1, 2, …, N), полученный путем выполнения M декомпозиций на N исходных компонентов ФП, используют как конечный компонент ФП, который используют как компонент ФП, используемый на следующем этапе S3.
Далее, на этапе S3 конкретный процесс анализа результата декомпозиции ДЛСМ и определения значения параметра k ВМД является следующим:
В традиционном способе, например, в патенте «СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ УТЕЧЕК НА ОСНОВЕ АНАЛИЗА ЭНТРОПИИ ОТНОСИТЕЛЬНО ВМД-КОМПОНЕНТА», K определяют путем использования способа наблюдения за средней частотой. Путем наблюдения за соответствующими средними частотами мод, которые соответствуют различным значениям K, когда возникают два модальных компонента с подобными средними частотами, число модальных уровней предыдущего уровня определяют, как значение K. В этом способе значение K выбирают вручную, наблюдая за средними частотами, что может дать декомпозицию эффективного сигнала об утечке и менее точный результат извлечения, что приводит к относительно большой погрешности восстановления после декомпозиции ВМД. Таким образом, в настоящем изобретении коэффициент корреляции r между yn каждого компонента ФП и исходным сигналом об утечке x(t) вычисляют путем использования коэффициента Пирсона для корреляции по смешанным моментам. Диапазон значений коэффициента корреляции r составляет [–1,1]. Если абсолютное значение коэффициента корреляции больше, то степень линейной корреляции между двумя образцами выше. Коэффициент эксцесса является безразмерным параметром, его используют для описания величины пика формы волны сигнала, и он является более чувствительным к шоковому сигналу. Основной компонент в сигнале об утечке является шоковым компонентом, а другой компонент рассматривается, как сигнал интерференционного шума. Если коэффициент эксцесса равняется 3, то считается, что сигнал, значение коэффициента эксцесса которого составляет менее 3, является сигналом помех. Более того, при утечке в трубопроводе большее значение коэффициента эксцесса показывает большую информацию сигнала об утечке. Таким образом, получают коэффициент корреляции между каждым компонентом ФП и исходным сигналом об утечке. Из определения коэффициента корреляции можно понять, что компонент, абсолютное значение поправочного коэффициента которого составляет более 0,5, является сильным компонентом корреляции. Таким образом, выбирают компонент ФП, абсолютное значение поправочного коэффициента которого составляет более 0,5, и вычисляют значение коэффициента эксцесса компонента ФП. Компонент ФП со значением коэффициента эксцесса менее 3 выбирают для снижения помех от некоррелированного компонента, когда собирают сигнал об утечке в трубопроводе. Выбранный компонент ФП анализируют для определения числа (значения k) компонентов в декомпозиции ВМД. Далее выполняют восстановление сигнала на выбранном компоненте ФП с получением восстановленного сигнала x'(t). В отличие от патента «СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ УТЕЧЕК ПРИРОДНОГО ГАЗА», выданного Wang Xiufang и др., в настоящем изобретении получают коэффициент корреляции каждого компонента ФП, выбирают компонент ФП, абсолютное значение которого составляет более 0,5, согласно коэффициенту корреляции, а затем определяют то, содержит ли компонент ФП сигнал шума, путем вычисления значения коэффициента эксцесса компонента для определения значения числа K уровней декомпозиции ВМД.
Далее, на этапе S4 конкретный процесс выполнения декомпозиции ВМД на восстановленном сигнале x'(t) и выбор компонента ВМФ включает следующие этапы, на которых:
S4.1: выполняют декомпозицию восстановленного сигнала x'(t) путем использования ВМД на k компонентов ВМФ, как показано в следующей формуле:
 (3),
(3),
где uk представляет kый компонент ВМФ, а k = 1, 2, …, n, где
суть алгоритма ВМД заключается в решении вариационной задачи, и его процесс является следующим:
для uk(t) каждого компонента ВМФ его аналитический сигнал  может быть получен путем использования преобразования Гилберта:
может быть получен путем использования преобразования Гилберта:
 (4),
(4),
где δ(t) представляет собой функцию Дирихле, j представляет собой символ мнимого числа, среднюю частоту ωk оценивают для каждого модального аналитического сигнала, выполняют смешивание, и спектр частот каждой моды модулируют в соответствующую основную полосу для формирования нового аналитического сигнала, записываемого, как  , как показано далее:
, как показано далее:
 (5),
(5),
вычисляют квадрат L2 нормы градиента вышеуказанного демодулированного сигнала и оценивают полосу пропускания каждого модального компонента, где установленная ограниченная вариационная модель Y представляет собой:
 (6),
(6),
где {uk} = {u1, u2, …, uk} представляет собой k компонентов ВМФ, полученных посредством декомпозиции, {ωk} = { ω1, ω2, …, ωk} представляет собой среднюю частоту каждого компонента, а s.t. представляет собой английскую аббревиатуру условия ограничения;
для решения вышеуказанной ограниченной вариационной модели Y вводят вторичный поправочный коэффициент α и множитель Лагранжа λ(t), и расширенное выражение Лагранжа формулируют следующим образом:
 ,
,
где компонент ВМФ и его средние частоты:  ,
,  , и λn+1 непрерывно обновляют при помощи алгоритма переменного направления множителей, где uk представляет собой kый компонент ВМФ, ωk представляет собой среднюю частоту, соответствующую uk, λ представляет собой множитель Лагранжа, n представляет собой положительное целое число, а f представляет собой максимальное отклонение средней частоты ωk, до тех пор, пока не будет удовлетворено следующее условие остановки итерации:
, и λn+1 непрерывно обновляют при помощи алгоритма переменного направления множителей, где uk представляет собой kый компонент ВМФ, ωk представляет собой среднюю частоту, соответствующую uk, λ представляет собой множитель Лагранжа, n представляет собой положительное целое число, а f представляет собой максимальное отклонение средней частоты ωk, до тех пор, пока не будет удовлетворено следующее условие остановки итерации:
 ,
,
где точность определения θ > 0, седельная точка полученной в конечном итоге формулы (7) является оптимальным решением, и получают k {uk};
S4.2: выбирают k компонентов ВМФ путем вычисления ММЭ, где большая ММЭ показывает, что ее компонент содержит больше информации об утечке, устанавливают исходную временную последовательность компонента ВМФ от uk до {u1, u2, …, uk}, длительность до N, устанавливают их размерность вложения до w, а также допуск сходства до z, и выполняют грубое преобразование на исходной временной последовательности с получением новой временной последовательности:
 ,
,
где k = 1, 2, …, s/τ, где μ, k являются положительными целыми числами, и μ ≠ k, s является длительностью дискретной временной последовательности, τ представляет собой коэффициент масштаба, исходная временная последовательность сегментирована на τ сегментов, где каждый сегмент представляет грубую последовательность с длительностью s/τ, и когда τ = 1, новая временная последовательность представляет собой исходную временную последовательность; w-размерный вектор временной последовательности формируют путем использования размерности w и допуска сходства z, и его записывают, как xμ(w) = { xμ, xμ+1, ..., xμ+w−1}, где xμ является вектором конкретной размерности во временной последовательности, μ = (k − 1) τ + 1, и xμ представляет собой значение в исходной временной последовательности;
вычисляют энтропию образца для каждой грубой временной последовательности с длительностью s/τ по отдельности с получением ее значения энтропии образца, и вычерчивают значение энтропии образца в зависимости от коэффициента масштаба для значения ММЭ согласно формуле (10):
 ,
,
где MSE представляет собой ММЭ, SampE представляет собой энтропию образца, w представляет собой размерность вложения, k представляет собой положительное целое число, τ представляет собой коэффициент масштаба, z представляет собой допуск сходства, s представляет собой длительность временной последовательности, uk представляет собой компонент ВМФ, φk представляет собой конкретный момент временной последовательности, ukτ относится к выполнению многомасштабного преобразования компонента ВМФ, а коэффициентом масштаба является τ; и
S4.5: выбирают оптимальную ММЭ MSEn на каждой шкале и, наконец, вычисляют значения ММЭ соответствующих компонентов ВМФ: MSE1, MSE2, MSE3, …, MSEn, причем по сравнению с патентом «УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ УТЕЧКИ В ТРУБОПРОВОДЕ, ИСПОЛЬЗУЯ АЛГОРИТМ PSO-ВМД», в настоящем изобретении число уровней декомпозиции, то есть значение K, в ВМД оптимизируют при помощи ДЛСМ, и после декомпозиции выполняют анализ в каждой размерности на компоненте ВМФ согласно значению ММЭ, так что по сравнению с энтропией информации может быть извлечена более эффективная информация об утечке; и для выполнения анализа достоверности способ сравнивают со способом на основе одной декомпозиции ВМД для проверки.
Кроме того, на этапе S5 конкретный процесс получения оцененного сигнала об утечке посредством слепого разделения источников на основе анализа независимого компонента и выполнения определения положений путем взаимной корреляции на оцененном сигнале об утечке и исходном сигнале об утечке включает следующие этапы, на которых:
S5.1: получают значение ММЭ MSEn каждого компонента ВМФ посредством вышеуказанного процесса и выполняют выбор, где каждый компонент ВМФ представляет собой модальный компонент, включающий информацию об утечке различных степеней на множестве масштабов, и извлекают временной интервал и спектр частот каждого выбранного компонента ВМФ для восстановления с получением наблюдаемого сигнала  причем наблюдаемый сигнал представляет собой математическое выражение для сигнала и временной функции, и его получают путем восстановления временного интервала и спектра частот компонента ВМФ при помощи MATLAB, и созданный многомерный наблюдаемый сигнал решает проблему недоопределенного слепого источника, то есть когда число датчиков меньше, чем число источников сигнала;
причем наблюдаемый сигнал представляет собой математическое выражение для сигнала и временной функции, и его получают путем восстановления временного интервала и спектра частот компонента ВМФ при помощи MATLAB, и созданный многомерный наблюдаемый сигнал решает проблему недоопределенного слепого источника, то есть когда число датчиков меньше, чем число источников сигнала;
S5.2: вычисляют матрицу коэффициентов корреляции  наблюдаемого сигнала путем выполнения разделения на наблюдаемом сигнале
наблюдаемого сигнала путем выполнения разделения на наблюдаемом сигнале  где
где  представляет собой диагональную матрицу затем оценивают число j оцененных сигналов об утечке согласно значению признака, центрируют наблюдаемый сигнал и выполняют процесс придания свойств белого шума для того, чтобы, наконец, получить j оцененных сигналов об утечке
представляет собой диагональную матрицу затем оценивают число j оцененных сигналов об утечке согласно значению признака, центрируют наблюдаемый сигнал и выполняют процесс придания свойств белого шума для того, чтобы, наконец, получить j оцененных сигналов об утечке  в трубопроводе после слепого разделения источников, и далее выполняют вычисление коэффициента корреляции на оцененных сигналах об утечке и исходном сигнале об утечке для определения конкретных исходных сигналов, с которыми оцененные сигналы об утечке, соответственно, имеют соответствие «один к одному»;
в трубопроводе после слепого разделения источников, и далее выполняют вычисление коэффициента корреляции на оцененных сигналах об утечке и исходном сигнале об утечке для определения конкретных исходных сигналов, с которыми оцененные сигналы об утечке, соответственно, имеют соответствие «один к одному»;
S5.3: вычисляют временную задержку △t оцененных сигналов об утечке выше и ниже по потоку (t) и  после слепого разделения источников путем взаимной корреляции, и определяют место утечки в трубопроводе согласно способу определения положения по разности во времени:
после слепого разделения источников путем взаимной корреляции, и определяют место утечки в трубопроводе согласно способу определения положения по разности во времени:
 ,
,
где в формуле d представляет собой оцененное значение определения положения утечки, l представляет собой расстояние между находящимися выше и ниже по потоку датчиками, v представляет собой скорость распространения сигнала акустического излучения утечки в трубопроводе, а Δt представляет собой временную задержку.
S5.3: вычисляют временную задержку △t оцененных сигналов об утечке выше и ниже по потоку  и после слепого разделения источников путем взаимной корреляции, получая скорость распространения v в случае определения таких параметров, как давление, диаметр отверстия и среда, определяя место точки утечки в трубопроводе согласно способу определения положения по разности во времени:
и после слепого разделения источников путем взаимной корреляции, получая скорость распространения v в случае определения таких параметров, как давление, диаметр отверстия и среда, определяя место точки утечки в трубопроводе согласно способу определения положения по разности во времени:
 ,
,
где в формуле d представляет собой оцененное значение определения положения утечки, а именно расстояние от точки утечки до находящегося выше по потоку датчика давления, l представляет собой расстояние между находящимися выше и ниже по потоку датчиками, v представляет собой скорость распространения сигнала акустического излучения утечки в трубопроводе, и Δt представляет собой временную задержку, а (t) и соответственно представляют собой исходный сигнал об утечке, полученный выше по потоку, и исходный сигнал об утечке, полученный ниже по потоку, после слепого разделения источников.
Положительные эффекты настоящего изобретения заключаются в следующем: Настоящее изобретение обеспечивает способ многопозиционного определения положения утечек на основе улучшенной ВМД. В способе, сигнал об утечке в трубопроводе собирают посредством прибора для акустического излучения, и на сигнале выполняют уменьшение шума при помощи ДЛСМ и ВМД. Результат после декомпозиции ДЛСМ анализируют путем использования коэффициента корреляции. Оптимизируют и выбирают число K уровней декомпозиции в способе ВМД. Далее, компонент ВМФ, содержащий большое количество информации об утечке, в конечном итоге выбирают путем расчета ММЭ компонента ВМФ. На компоненте ВМФ выполняют восстановление и уменьшение шума путем использования слепого разделения источников на основе анализа независимых компонентов. Наконец, определяют положение оцененного сигнала об утечке, полученного после слепого разделения источников, путем использования взаимной корреляции. В настоящем изобретении сигнал об утечке в трубопроводе может быть извлечен эффективным образом, при этом исключается воздействие компонента с низкой корреляцией и шума в исходном сигнале об утечке, так что конечный результат определения места является более точным.
КРАТКОЕ ОПИСАНИЕ ФИГУР
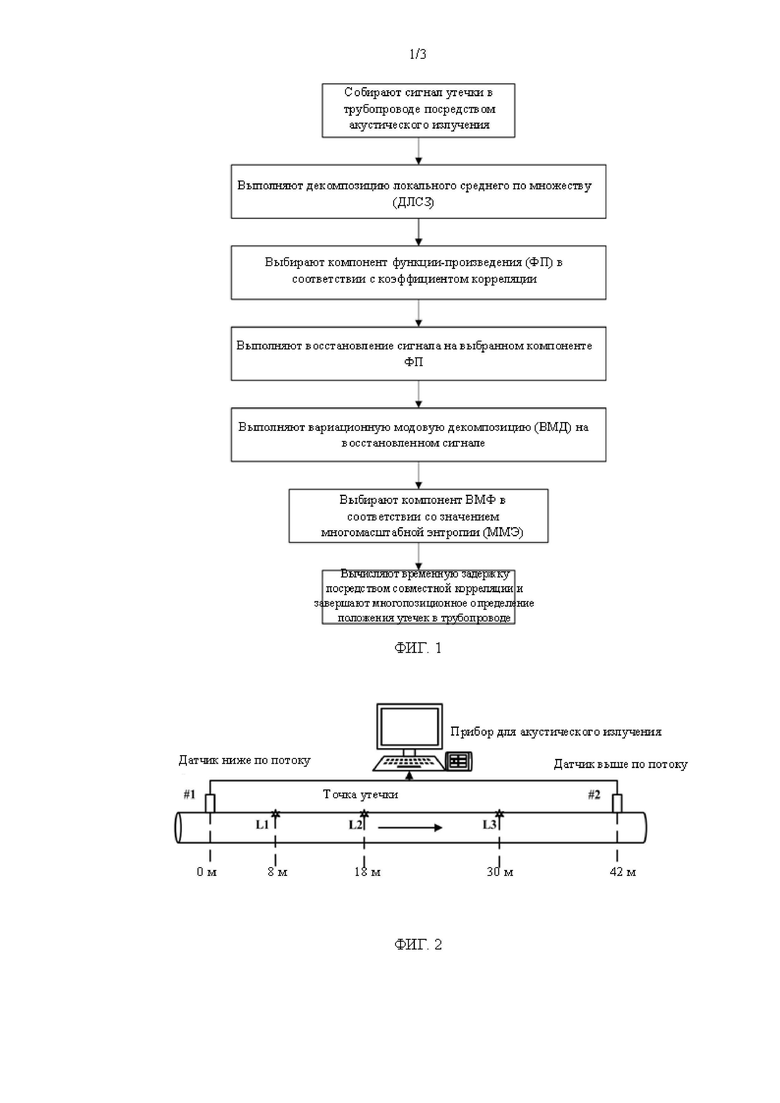
ФИГ. 1 представляет собой схематическую принципиальную схему оптимального варианта реализации настоящего изобретения;
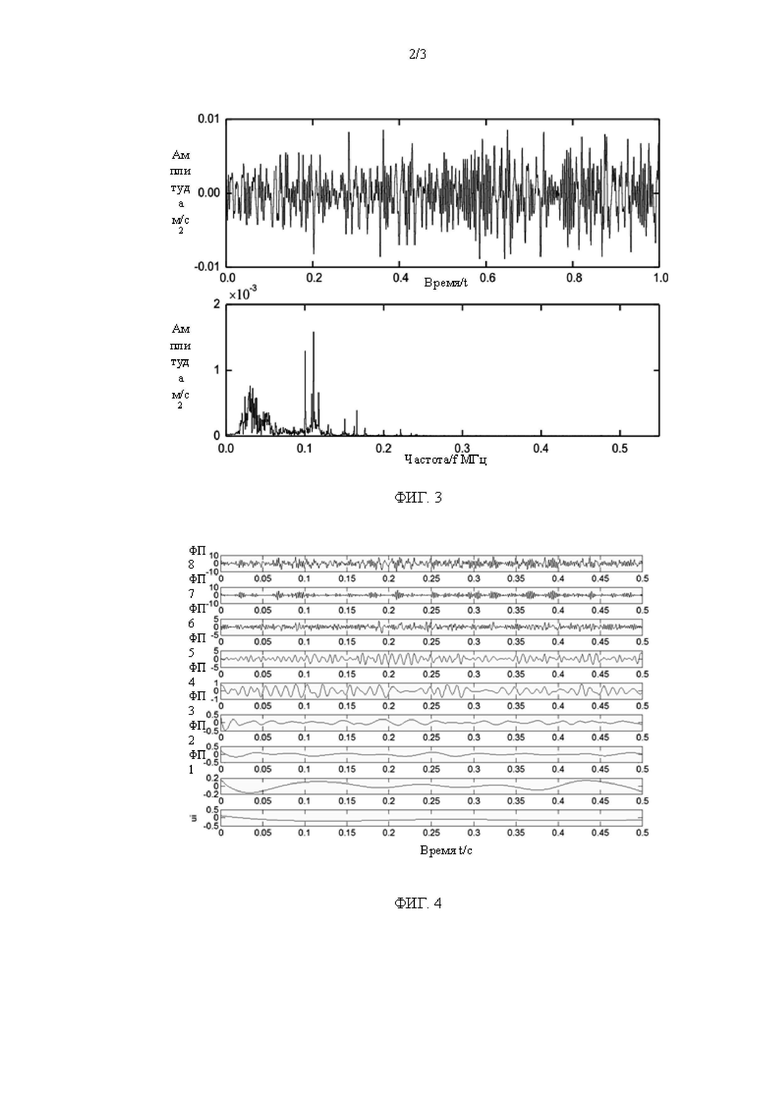
ФИГ. 2 представляет собой схематическую диаграмму расположения утечек в трубопроводе;
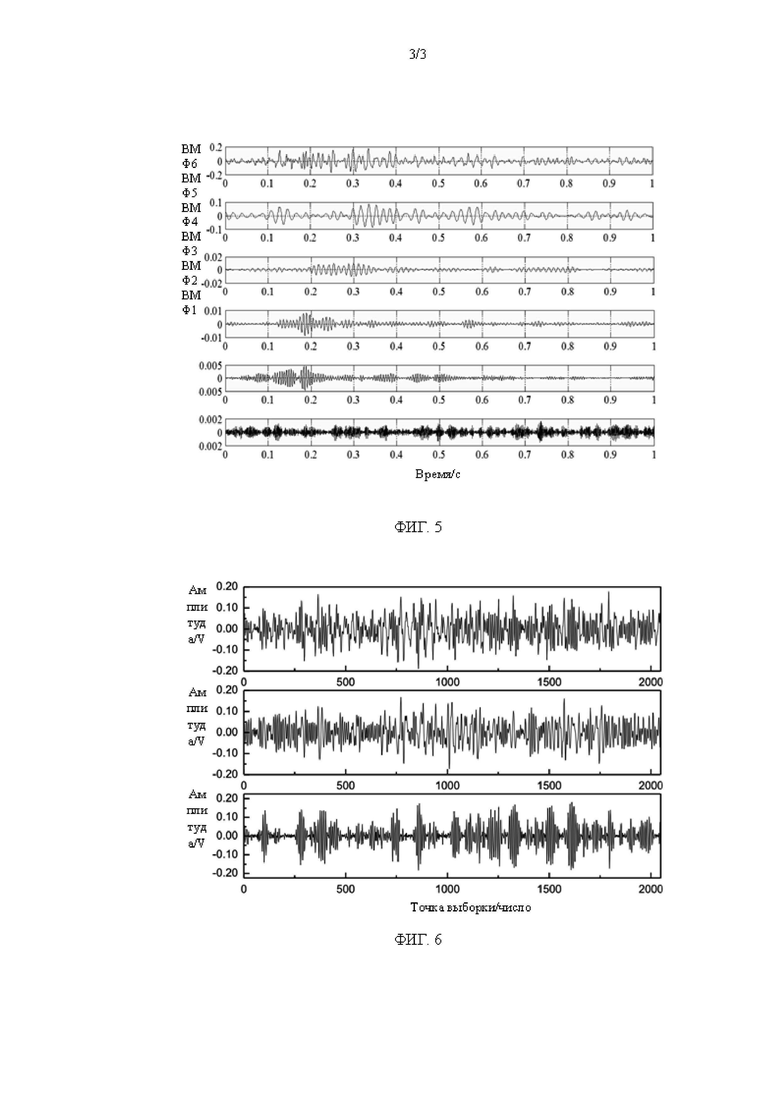
ФИГ. 3 представляет собой частотно-временную диаграмму исходного сигнала об утечке выше по потоку;
ФИГ. 4 представляет собой диаграмму результата декомпозиции ДЛСМ;
ФИГ. 5 представляет собой диаграмму результата декомпозиции ВМД; и
ФИГ. 6 представляет собой частотно-временную диаграмму оцененного сигнала об утечке после слепого разделения источников.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение подробно описано ниже со ссылкой на сопроводительные чертежи. Фигуры представляют собой краткие схематические изображения и используются лишь для описания базовой структуры настоящего изобретения, и, следовательно, на них показана структура, относящаяся только к настоящему изобретению.
В настоящем изобретении представлен способ многопозиционного определения положения утечек на основе улучшенной ВМД. Например, ФИГ. 1 представляет собой конкретную принципиальную схему настоящего изобретения. Ссылаясь на способы, такие как алгоритм ДЛСМ, алгоритм ВМД, ММЭ, слепое разделение источников на основе анализа независимых компонентов, конкретными этапами являются следующие этапы, на которых:
1. Используют следующие экспериментальные параметры: длина трубопровода составляет 50 м, исходное давление трубопровода составляет 0,3 МПа, расстояние между двумя датчиками составляет 42 м, причем два датчика расположены выше и ниже по потоку в трубопроводе, соответственно, а точки утечки, соответственно, расположены на расстоянии 8 м, 18 м и 30 м от находящегося выше по потоку датчика, и диаметр отверстия утечки составляет 1 мм. Экспериментальное расположение трубопровода показано на ФИГ. 2. 4-канальный цифровой детектор модели 6006, произведенный компанией «American PAC», использовали в качестве прибора для акустического излучения. Низкочастотный датчик использовали в качестве датчика акустического излучения, причем его моделью была DP3I, диапазоны частот отклика составляли от 20 до 100 кГц, резонансная частота составляла 30 кГц, частота выборки составляет 1 млн. выборок в секунду, а коэффициент усиления встроенного усилителя составляет 40 дБ. Сигналы об утечке в трубопроводе собирают путем использования прибора для акустического излучения, и полученные сигналы об утечке ниже и выше по потоку, соответственно, записывают, как x1(t) и x2(t). Исходный сигнал акустического излучения утечки x1(t), собранный находящимся выше по потоку датчиком, использовали в качестве примера. На ФИГ. 3 показано распределение временного интервала и спектра частот x1(t).
2. Выполняют ДЛСМ на сигнале об утечке x1(t), и выполняют усреднение числа раз, то есть 100 раз, согласно опыту, для снижения воздействия добавленного шума на реальный ФП. Однако, если амплитуда добавленного белого шума слишком мала, то эффект изменения распределения предельных точек не может быть получен. Если амплитуда добавленного белого шума слишком большая, то, безусловно, воздействие добавленного шума может быть уменьшено, однако декомпозиция является слишком медленной. Таким образом, амплитуду добавленного белого шума устанавливают, как такую, которая в 0,15 раз меньше стандартного отклонения исходного сигнала об утечке. Операцию усреднения по множеству выполняют отдельно на компонентах ФП соответствующих порядков всего остаточного шума. Конечный полученный результат декомпозиции ДЛСМ показан на ФИГ. 4.
Из ФИГ. 4 можно увидеть, что восемь компонентов ФП и один остаточный компонент ui получены посредством декомпозиции ДЛСМ на исходном сигнале об утечке x1(t), а также можно увидеть, что шум составляет серьезные помехи для компонентов исходного сигнала об утечке x1(t), и форма исходного сигнала об утечке не может быть надежно извлечена. Кроме того, амплитуды компонентов ФП7-ФП8 сильно изменяются. Таким образом, способ ДЛСМ имеет специфическую шумоподавляющую способность, однако при декомпозиции может происходить явление модального наложения.
3. Вычисляют коэффициент корреляции каждого компонента ФП согласно правилу коэффициента корреляции для выбора компонента ФП. Коэффициент корреляции отражает близость корреляции между вариантами. Коэффициент корреляции r между каждым компонентом ФП и исходным сигналом об утечке x(t), а также значение коэффициента эксцесса, вычисляют путем использования коэффициента корреляции Пирсона по смешанным моментам, как показано в Таблице 1:
Таблица 1: Коэффициент корреляции и значение коэффициента эксцесса каждого компонента ФП
Согласно результатам, полученным в Таблице 1, коэффициенты корреляции компонентов ФП1-ФП7 составляют больше 0,5, а коэффициент корреляции ФП8 составляет меньше 0,5. Из определения коэффициента корреляции можно понять, что компонент, коэффициент корреляции которого составляет более 0,5, является сильным компонентом корреляции. Таким образом, компонент ФП8 отбрасывают. Затем значение коэффициента эксцесса ФП7 составляет менее 3. Таким образом, определено, что число компонентов в декомпозиции ВМД составляет 6, а именно k = 6. Для удаления компонента с низкой корреляцией из восстановленного сигнала, ФП1-ФП6 выбирают для восстановления с получением восстановленного сигнала, записанного, как  .
.
4. Выполняют декомпозицию ВМД на восстановленном сигнале , где k = 6, α = 3000, при этом результат декомпозиции показан на ФИГ. 5. На ФИГ. 5 можно увидеть, что после уменьшения шума посредством ДЛСМ, сигнал подвергается декомпозиции посредством ВМД с получением шести компонентов ВМФ и одного остаточного компонента. Для дальнейшего выбора компонента ВМФ вычисляли значения ММЭ соответствующих компонентов ВМФ при 0,3 МПа, 0,25 МПа и 0,2 МПа, при этом результаты показаны в Таблице 2.
Таблица 2: Значения ММЭ соответствующих компонентов ВМФ при различных значениях давления
Из Таблицы 2 можно понять, что значения ММЭ ВМФ1, ВМФ2, ВМФ3 и ВМФ4 являются относительно большими, а значения ММЭ компонентов ВМФ5 и ВМФ6 являются относительно маленькими. Таким образом, в компонентах ВМФ, полученных после декомпозиции сигнала посредством ВМД, ВМФ1, ВМФ2, ВМФ3 и ВМФ4 включают в себя большое количество характерной информации сигнала об утечке, а другие компоненты фактически не включают в себя эффективную информацию об утечке. Таким образом, в настоящем раскрытии ВМФ1, ВМФ2, ВМФ3 и ВМФ4 выбирают в качестве основных компонентов для восстановления. Таким образом, воздействие фонового шума и остаточных компонентов на сигнал об утечке может быть существенно снижено.
5. Выбирают компоненты ВМФ1-ВМФ4 посредством вышеуказанного процесса, извлекают временной интервал и спектр частот каждого компонента ВМФ для восстановления с получением наблюдаемого сигнала где созданный многомерный наблюдаемый сигнал решает проблему недоопределенного слепого источника надежным образом, вычисляют значение признака матрицы коэффициентов корреляции Rx и оценивают число источников для наблюдаемого сигнала. Значения признаков, соответствующие компонентам ВМФ1-ВМФ4, составляют 1,4393, 1,0558, 1,0265 и 0,497 соответственно. Первые три значения признаков являются относительно большими. Таким образом, число оцененных сигналов об утечке составляет 3. Три оцененных сигнала об утечке выше по потоку Yμ(t) в трубопроводе получают при помощи способа слепого разделения источников на основе анализа независимых компонентов, как показано на ФИГ. 6. Подобным образом, может быть получено три оцененных сигнала об утечке ниже по потоку  . При фактическом определении положения утечки в нескольких местах, поскольку все сигналы, отделенные после слепого разделения источников, являются сигналами об утечке, конкретные соответствия между оцененными сигналами об утечке и местами утечки нельзя различить согласно диаграмме временных интервалов после разделения. Таким образом, вычисляют коэффициент корреляции между каждыми двумя из трех отделенных сигналов выше по потоку и тремя отделенными сигналами ниже по потоку, при этом результаты показаны в Таблице 3. Сигналы с корреляцией имеют относительно большой коэффициент корреляции, так что выполняют отличение того, исходят ли сигналы из одного и того же места утечки, и получают соответствующие сигналы об утечке ниже и выше по потоку.
. При фактическом определении положения утечки в нескольких местах, поскольку все сигналы, отделенные после слепого разделения источников, являются сигналами об утечке, конкретные соответствия между оцененными сигналами об утечке и местами утечки нельзя различить согласно диаграмме временных интервалов после разделения. Таким образом, вычисляют коэффициент корреляции между каждыми двумя из трех отделенных сигналов выше по потоку и тремя отделенными сигналами ниже по потоку, при этом результаты показаны в Таблице 3. Сигналы с корреляцией имеют относительно большой коэффициент корреляции, так что выполняют отличение того, исходят ли сигналы из одного и того же места утечки, и получают соответствующие сигналы об утечке ниже и выше по потоку.
Таблица 3: Таблица коэффициентов корреляции между оцененными сигналами об утечке выше и ниже по потоку



Из Таблицы 3 можно увидеть, что Y1 и , Y2 и , и Y3 и соответственно исходят из одних и тех же мест утечки. Таким образом, анализ взаимной корреляции проводят на Y1 и  с получением того, что частота, соответствующая значению пика временного спектра его функции взаимной корреляции, составляет 27,1945 кГц, а время задержки, соответствующее значению пика, соответствует 0,01749 с. Согласно эмпирическому значению, скорость волны сигнала акустического излучения под действием гидродинамической нагрузки составляет 1500 м/с. Путем временной замены задержки и скорости звука в формуле определения положения с зависимостью от времени, расстояние от находящегося выше по потоку датчика до места утечки можно определить, как 7,88 м, тогда как фактическое расстояние составляет 8 м. Таким образом, абсолютная погрешность определения положения составляет 0,12 м, а относительная погрешность составляет 1,5%. По аналогии можно рассчитать местоположения и относительные погрешности оставшихся двух мест утечки. Для проверки эффективности способа, способ сравнивают с прямой взаимной корреляцией и определением положения утечек в трубопроводе на основе декомпозиции ВМД. Результаты показаны в Таблице 4.
с получением того, что частота, соответствующая значению пика временного спектра его функции взаимной корреляции, составляет 27,1945 кГц, а время задержки, соответствующее значению пика, соответствует 0,01749 с. Согласно эмпирическому значению, скорость волны сигнала акустического излучения под действием гидродинамической нагрузки составляет 1500 м/с. Путем временной замены задержки и скорости звука в формуле определения положения с зависимостью от времени, расстояние от находящегося выше по потоку датчика до места утечки можно определить, как 7,88 м, тогда как фактическое расстояние составляет 8 м. Таким образом, абсолютная погрешность определения положения составляет 0,12 м, а относительная погрешность составляет 1,5%. По аналогии можно рассчитать местоположения и относительные погрешности оставшихся двух мест утечки. Для проверки эффективности способа, способ сравнивают с прямой взаимной корреляцией и определением положения утечек в трубопроводе на основе декомпозиции ВМД. Результаты показаны в Таблице 4.
Таблица 4: Сравнение результатов определения положения трех способов
Согласно результатам определения положения и погрешностей определения положения трех способов в Таблице 4, может быть получено, что средняя погрешность результата прямой взаимной корреляции составляет 7,45%, средняя погрешность определения положения способом ВМД составляет 4,3%, а минимальная погрешность определения положения способом, представленным в настоящем изобретении, составляет лишь 1,28%. Из таблицы можно ясно увидеть, что погрешность результата определения положения прямой взаимной корреляцией намного больше, чем у двух других способов. Поскольку в способе ВМД сигнал может подвергаться адаптивной декомпозиции, и могут быть удалены конкретные помехи, способ, представленный в настоящем изобретении, обеспечивает возможность извлечения большего количества информации об утечках после декомпозиции исходного сигнала об утечке посредством улучшенной ВМД, тем самым исключая воздействие числа уровней декомпозиции, а именно значения K, в ВМД на результат декомпозиции, снижая погрешность восстановления после декомпозиции ВМД и обеспечивая возможность точного многопозиционного определения положения утечки в трубопроводе. Вышеуказанные результаты доказывают эффективность способа.
В свете идеальных вариантов реализации настоящего изобретения, в вышеуказанное описание могут быть внесены различные изменения и модификации, не выходя за рамки объема настоящего изобретения. Технический объем настоящего изобретения не ограничен содержанием описания, и его технический объем следует определять согласно объему формулы изобретения.
Настоящее изобретение относится к способу многопозиционного определения положения утечек на основе улучшенной вариационной модовой декомпозиции (ВМД), включающему следующие этапы, на которых: собирают исходный сигнал об утечке в трубопроводе; выполняют декомпозицию локального среднего по множеству (ДЛСМ) на исходном сигнале об утечке с получением нескольких компонентов функции-произведения (ФП); вычисляют коэффициент корреляции каждого компонента ФП, выбирают необходимый компонент ФП согласно коэффициенту корреляции, выполняют восстановление сигнала согласно выбранному компоненту ФП и определяют значения k ВМД; выполняют ВМД на восстановленном сигнале с получением нескольких компонентов внутренней модовой функции (ВМФ), вычисляют значение многомасштабной энтропии (ММЭ) каждого компонента ВМФ и выбирают компонент ВМФ согласно значению ММЭ каждого компонента ВМФ; и выполняют восстановление сигнала на выбранном компоненте ВМФ и завершают определение положения утечки в трубопроводе путем выполнения вычисления для определения положения взаимной корреляцией на каждом сигнале об утечке после слепого разделения источников. В настоящем изобретении сигнал об утечке в трубопроводе может быть эффективным образом извлечен, а воздействие компонента с низкой корреляцией и шума в исходном сигнале об утечке исключается, так что конечный результат определения места является более точным. 6 з.п. ф-лы, 6 ил., 4 табл.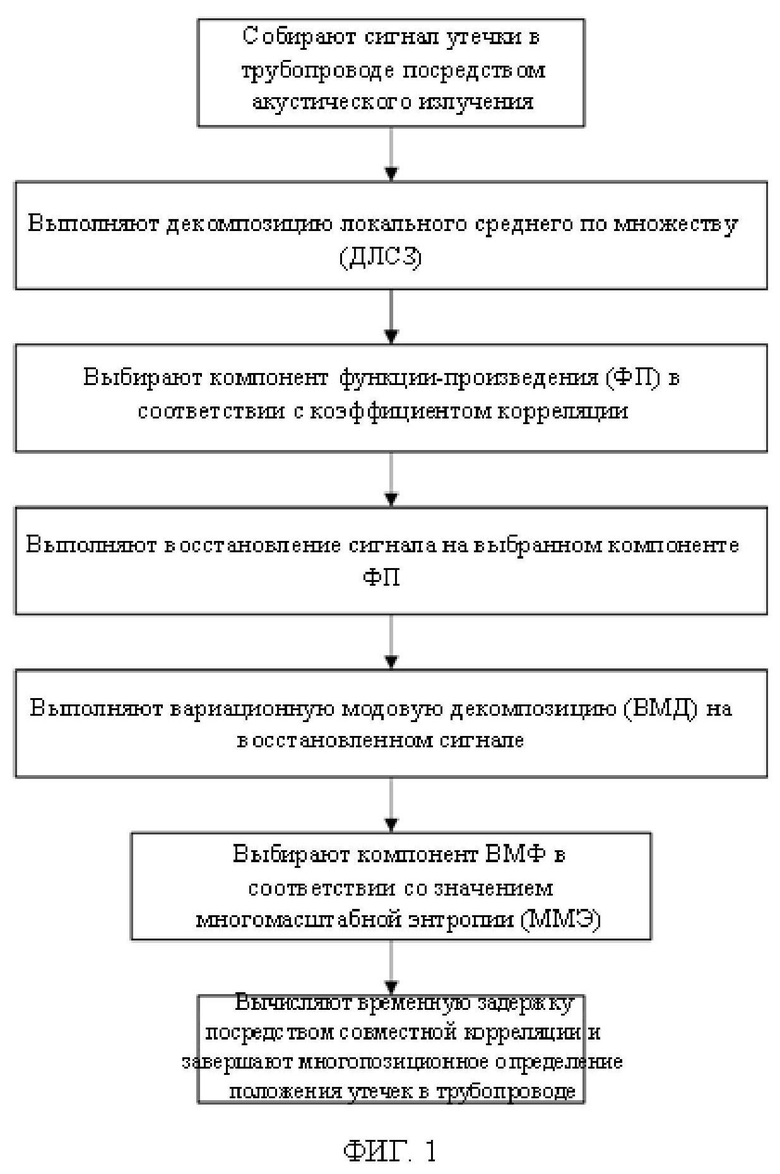
1. Способ многопозиционного определения положения утечек в трубопроводе на основе улучшенной вариационной модовой декомпозиции (ВМД), включающий следующие этапы, на которых:
S1: собирают исходный сигнал об утечке в трубопроводе;
S2: выполняют декомпозиции локального среднего по множеству (ДЛСМ) на исходном сигнале об утечке с получением нескольких компонентов функции-произведения (ФП);
S3: вычисляют коэффициент корреляции каждого компонента ФП, выбирают необходимый компонент ФП согласно коэффициенту корреляции, выполняют восстановление сигнала согласно выбранному компоненту ФП и определяют значение k ВМД;
S4: выполняют ВМД на восстановленном сигнале с получением нескольких компонентов внутренней модовой функции (ВМФ), вычисляют значение многомасштабной энтропии (ММЭ) каждого компонента ВМФ и выбирают компонент ВМФ согласно значению ММЭ каждого компонента ВМФ; и
S5: выполняют восстановление сигнала на выбранном компоненте ВМФ с получением наблюдаемого сигнала, и выполняют процесс декомпозиции на наблюдаемом сигнале путем использования способа слепого разделения источников на основе анализа независимых компонентов с получением оцененного сигнала об утечке, и выполняют определение положения утечки в трубопроводе согласно оцененному сигналу об утечке путем использования алгоритма определения положения взаимной корреляцией.
2. Способ по п. 1, отличающийся тем, что способ ДЛСМ на этапе S2 включает следующие этапы, на которых:
S2.1: добавляют сигнал белого шума nm(t) определенного уровня в исходный сигнал об утечке x(t) с получением смешанного сигнала об утечке xm(t), причем сигнал об утечке представлен как:
 ,
,
где m представляет собой число декомпозиций, t представляет собой время, nm(t) представляет собой сигнал белого шума, а xm(t) представляет собой смешанный сигнал об утечке после добавления белого шума;
S2.2: выполняют декомпозицию ДЛСЗ на смешанном сигнале об утечке xm(t) и далее выполняют усреднение по множеству с получением конечного компонента ФП, записанного как:
 ,
,
где εn,m(n=1,2,…,N), N представляет собой положительное целое число, εn,m представляет собой n-й исходный компонент ФП, полученный после m-й декомпозиции, а средний yn (n=1,2,…,N), полученный путем выполнения M декомпозиций на N исходных компонентов ФП, используют как конечный компонент ФП.
3. Способ по п. 1, отличающийся тем, что этап S3 включает, в частности, следующие этапы, на которых:
S3.1: вычисляют коэффициент корреляции r между yn каждого компонента ФП и исходным сигналом об утечке x(t) путем использования коэффициента Пирсона для корреляции по смешанным моментам;
S3.2: выбирают, согласно коэффициенту корреляции r, компонент ФП, абсолютное значение поправочного коэффициента которого больше, чем a, затем вычисляют значение коэффициента эксцесса компонента ФП и получают выбранный компонент ФП путем отбрасывания компонента ФП, значение коэффициента эксцесса которого меньше, чем b; и
S3.3: наконец, определяют число k компонентов в декомпозиции ВМД, а затем выполняют восстановление сигнала на выбранном компоненте ФП с получением восстановленного сигнала x'(t).
4. Способ по п. 3, отличающийся тем, что значение a устанавливают как 0,5, а значение b устанавливают как 3.
5. Способ по п. 1, отличающийся тем, что этап S4 включает, в частности, следующие этапы, на которых:
S4.1: выполняют декомпозицию ВМД на восстановленном сигнале x'(t) с получением k компонентов ВМФ; и
S4.2: выбирают компонент ВМФ путем вычисления ММЭ, где способ получения ММЭ включает этапы, на которых:
(1) устанавливают исходную временную последовательность компонента ВМФ от uk до {u1, u2, …, uN}, длительность до N, устанавливают ее размерность вложения до w и допуск сходства до z и выполняют грубое преобразование на исходной временной последовательности с получением новой временной последовательности uk(τ):
 ,
,
где k=1,2,…,s/τ, где μ, k являются положительными целыми числами, и μ≠k, s является длительностью дискретной временной последовательности, τ представляет собой коэффициент масштаба, исходную временную последовательность сегментируют на τ сегментов, где каждый сегмент является грубой последовательностью с длительностью s/τ, и когда τ=1, новая временная последовательность является исходной временной последовательностью;
(2) вычисляют энтропию образца для каждой грубой временной последовательности с длительностью N/τ по отдельности с получением ее значения энтропии образца и вычерчивают значение энтропии образца в зависимости от коэффициента масштаба, где значение ММЭ MSE(uk, τ, w, z) получают согласно формуле (5):
 ,
,
где в формуле SampE{ukτ, w, z, s} представляет собой энтропию образца, а w представляет собой размерность вложения; ϕk представляет собой конкретный момент временной последовательности, ukτ относится к выполнению многомасштабного преобразования на компоненте ВМФ, а коэффициентом масштаба является τ; и
(3) выбирают оптимальный компонент ВМФ согласно величине значения ММЭ, чтобы в конечном итоге получить значения ММЭ соответствующих компонентов ВМФ, записанные как: MSE1, MSE2, MSE3, …, MSEn.
6. Способ по п. 1, отличающийся тем, что временную задержку Δt оцененных сигналов об утечке выше и ниже по потоку Yμ(t) и  после слепого разделения источников вычисляют путем использования алгоритма определения положения взаимной корреляцией и место утечки в трубопроводе определяют согласно формуле (11):
после слепого разделения источников вычисляют путем использования алгоритма определения положения взаимной корреляцией и место утечки в трубопроводе определяют согласно формуле (11):
 ,
,
где в формуле d представляет собой оцененное значение определения положения утечки, l представляет собой расстояние между находящимися выше и ниже по потоку датчиками, v представляет собой скорость распространения сигнала акустического излучения утечки в трубопроводе, и Δt представляет собой временную задержку.
7. Способ по п. 1, отличающийся тем, что стадия S5 специально включает следующие стадии:
S5.1: извлекают временной интервал и спектр частот каждого выбранного компонента ВМФ для восстановления с получением наблюдаемого сигнала
 ,
,
где в формуле bn(t) представляет собой функцию наблюдаемого сигнала относительно времени и входит в состав компонента ВМФ;
S5.2: вычисляют матрицу коэффициентов корреляции Rx=E[Nimƒ(t)NimƒH(t)] наблюдаемого сигнала путем выполнения декомпозиции на наблюдаемом сигнале Nimƒ(t), причем NimƒH(t) представляет собой диагональную матрицу Nimƒ(t), затем оценивают число j оцененных сигналов об утечке согласно значению признака, центрируют наблюдаемый сигнал Nimƒ(t) и выполняют процесс придания свойств белого шума, чтобы в конечном итоге получить j оцененных сигналов об утечке Yμ(t) в трубопроводе после слепого разделения источников, и далее выполняют вычисление коэффициента корреляции на оцененных сигналах об утечке и исходном сигнале об утечке для определения соответствующих мест утечки, соответствующих оцененным сигналам об утечке; и
S5.3: вычисляют временную задержку Δt оцененных сигналов об утечке выше и ниже по потоку (t) и после слепого разделения источников путем взаимной корреляции и определяют место утечки в трубопроводе согласно способу определения положения по разности во времени:
 ,
,
где в формуле d представляет собой оцененное значение определения положения утечки, l представляет собой расстояние между находящимися выше и ниже по потоку датчиками, v представляет собой скорость распространения сигнала акустического излучения утечки в трубопроводе, и Δt представляет собой временную задержку.
| CN 109469837 A, 15.03.2019 | |||
| CN 109630908 A, 16.04.2019 | |||
| CN 109654384 A, 19.04.2019 | |||
| Способ определения утечек в трубопроводах и устройство для его осуществления | 2018 |
|
RU2688903C1 |
| СПОСОБ ОБНАРУЖЕНИЯ УТЕЧЕК НЕФТИ И НЕФТЕПРОДУКТОВ | 2015 |
|
RU2610968C1 |

