Изобретение относится к радиолокационной метеорологии и может быть использовано для обнаружения областей с повышенной турбулентностью и количественной оценки и уровня турбулизации воздуха.
Известно устройство для определения состояния атмосферы, содержащее последовательно соединенные передатчик и антенный переключатель, антенну, генератор стандартных сигналов, последовательно соединенные приемник, блок стробирования, пиковый детектор, интегратор и вычислитель, причем вход приемника подключен ко второму выходу антенного переключателя, второй выход передатчика подключен ко второму входу блока стробирования, а выход генератора стандартных сигналов подключен к входу приемника; в устройство также введены вращающаяся секция круглого волновода со встроенной четвертьволновой фазовой пластинкой и последовательно соединенные блок управления и исполнительный механизм, вал которого соединен механической зубчатой передачей 1:1 с вращающейся секцией круглого волновода с встроенной четвертьволновой фазовой пластинкой, причем выход антенного переключателя подключен к входу антенны через вращающуюся секцию круглого волновода со встроенной четвертьволновой пластинкой, SU 1128211 А.
Данное устройство позволяет определять состояние атмосферы в отношении количественной оценки интенсивности осадков, однако с его помощью невозможно выявить атмосферные области с повышенной турбулентностью.
Известно устройство для определения состояния атмосферы, содержащее блок синхронизации, блок запуска, передатчик, циркулятор, антенну с блоком управления, приемник, блок стробирования, аналого-цифровой преобразователь, блок вычисления коэффициента автокорреляции временной последовательности принятых отраженных радиолокационных сигналов, блок пороговой селекции по значению коэффициента корреляции, блок представления информации (индикации), при этом второй выход синхронизатора соединен с первым входом блока стробирования, выход которого соединен с первым входом аналого-цифрового преобразователя, третий выход синхронизатора соединен со вторым входом аналого-цифрового преобразователя, выход блока запуска соединен со входом передатчика, выход которого соединен с первым плечом циркулятора, второе плечо которого соединено с первым входом антенны, второй вход которой соединен с первым выходом блока управления, третье плечо циркулятора соединено со входом приемника, выход аналого-цифрового преобразователя соединен с первым входом блока памяти, RU 2128847.
Принцип работы данного устройства, принятого за прототип настоящей полезной модели, основан на вычислении коэффициента корреляции амплитуды принятого сигнала. Данное устройство позволяет определить состояние атмосферы и, в частности, также обнаруживать атмосферные зоны с повышенным уровнем турбулентности, однако достоверность обнаружения таких зон низка, поскольку на работу устройства значительное влияние оказывают внутренние шумы приемника, приводящие к смещению оценки мощности принятого сигнала, на которое нормируются значения корреляционной функции при вычислении коэффициента корреляции амплитуды принятого сигнала. Кроме того, следует отметить, что количественная оценка турбулентности с помощи данного устройства, практически, невозможна из-за того, что уровень турбулентности оценивается исходя из ширины корреляционной функции амплитуды принятых радиолокационных сигналов, которая хотя и связана со средним квадратическим отклонением скорости ветра, но связь эта неоднозначна и не может быть положена в основу количественной оценки уровня турбулентности.
В основу настоящего изобретения положено решение задачи увеличения достоверности обнаружения атмосферных зон с повышенным уровнем турбулентности и обеспечение возможности его количественной оценки. Согласно изобретению эта задача решается за счет того, что в устройстве для определения состояния атмосферы, содержащем синхронизатор, блок запуска, передатчик, циркулятор, антенну с блоком управления, приемник, блок стробирования, аналого-цифровой преобразователь, блок памяти, блок индикации, при этом первый выход синхронизатора соединен со входом блока запуска, второй выход синхронизатора соединен с первым входом блока стробирования, выход которого соединен с первым входом аналого-цифрового преобразователя, третий выход синхронизатора соединен со вторым входом аналого-цифрового преобразователя, выход блока запуска соединен со входом передатчика, выход которого соединен с первым плечом циркулятора, второе плечо которого соединено с первым входом антенны, второй вход которой соединен с первым выходом блока управления, третье плечо циркулятора соединено со входом приемника, выход аналого-цифрового преобразователя соединен с первым входом блока памяти; дополнительно введены: амплитудный детектор, блок вычисления нулевого момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов, блок вычисления вектора отсчетов корреляционной функции амплитуды принятых радиолокационных сигналов, блок вычисления второго момента спектральной плотности мощности принятых радиолокационных сигналов, блок деления, блок умножения, блок вычисления квадратного корня, генератор масштабного коэффициента, блок сравнения, при этом второй выход синхронизатора соединен со вторым входом блока памяти, вход амплитудного детектора соединен с выходом приемника, а его выход соединен со вторым входом блока стробирования, второй выход блока управления соединен со вторым входом блока индикации, первый вход которого соединен с выходом блока сравнения, вход которого соединен с выходом блока вычисления квадратного корня, вход которого соединен с выходом блока умножения, второй вход которого соединен с выходом генератора масштабного коэффициента, а его первый вход соединен с выходом блока деления, первый вход которого соединен с выходом блока вычисления нулевого момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов, первый вход которого соединен с выходом блока вычисления вектора отсчетов корреляционной функции амплитуды принятых радиолокационных сигналов, который соединен также с первым входом блока вычисления второго момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов, выход которого соединен со вторым входом блока деления, а второй вход соединен с выходом блока памяти, причем выход блока памяти также соединен со входом блока вычисления вектора отсчетов корреляционной функции амплитуды принятых радиолокационных сигналов и со вторым входом блока вычисления нулевого момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов.
Заявителем не выявлены источники, содержащие информацию о технических решениях, идентичных настоящему изобретению, что позволяет сделать вывод о его соответствии критерию "новизна".
Благодаря реализации отличительных признаков изобретения достигается важный технический эффект, который состоит в значительном уменьшении влияния внутренних шумов приемника, поскольку исключается нулевой отчет корреляционной функции, в максимальной степени подверженный смещению в процессе работы устройства. Кроме того, благодаря определению вектора отчетов корреляционной функции в равностоящие друг от друга интервалы времени обеспечивается возможность измерения моментов спектральной плотности мощности амплитуды принятых радиолокационных сигналов, на основании которых с высокой точностью определяется среднее квадратическое отклонение скорости ветра.
Заявителем не обнаружены какие-либо источники информации, содержащие сведения о влиянии заявленных отличительных признаков на достигаемый вследствие их реализации технический результат. Это, по мнению заявителя, свидетельствует о соответствии данного технического решения критерию «изобретательский уровень».
Сущность изобретения поясняется чертежом, на котором приведена блок-схема устройства.
Устройство для определения состояния атмосферы содержащит синхронизатор 1, блок 2 запуска, передатчик 3, циркулятор 4, антенну 5 с блоком 6 управления, приемник 7, блок 9 стробирования, аналого-цифровой преобразователь 10 (АЦП), блок 11 памяти; первый выход синхронизатора 1 соединен со входом 2 блока запуска, второй выход синхронизатора 1 соединен с первым входом блока 9 стробирования и вторым входом блока памяти 11; выход блока 9 стробирования соединен с первым входом АЦП 10, третий выход синхронизатора 1 соединен со вторым входом АЦП 10; выход блока 2 запуска соединен со входом передатчика 3, выход которого соединен с первым плечом циркулятора 4, второе плечо которого соединено с первым входом (фидером) антенны 5, второй вход которой соединен с первым выходом блока 6 управления, третье плечо циркулятора 4 соединено со входом приемника 7, выход АЦП 10 соединен с первым входом блока 11 памяти; устройство также содержит: амплитудный детектор 8, блок 12 вычисления нулевого момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов, блок 13 вычисления вектора отсчетов корреляционной функции (КФ) амплитуды принятых радиолокационных сигналов, блок 14 вычисления второго момента спектральной плотности мощности принятых радиолокационных сигналов, блок 15 деления, блок 16 умножения, блок 17 вычисления квадратного корня, генератор 18 масштабного коэффициента, блок 19 сравнения, блок 20 индикации. Вход амплитудного детектора 8 соединен с выходом приемника 7, а его выход соединен со вторым входом блока 9 стробирования, второй выход блока 6 управления соединен со вторым входом блока 20 индикации, первый вход которого соединен с выходом блока 19 сравнения, вход которого соединен с выходом блока 17 вычисления квадратного корня, вход которого соединен с выходом блока 16 умножения, второй вход которого соединен с выходом генератора 18 масштабного коэффициента, а его первый вход соединен с выходом блока 15 деления, первый вход которого соединен с выходом блока 12 вычисления нулевого момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов, первый вход которого соединен с выходом блока 13 вычисления вектора отсчетов корреляционной функции амплитуды принятых радиолокационных сигналов, который соединен также с первым входом блока 14 вычисления второго момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов, выход которого соединен со вторым входом блока деления, а второй вход соединен с выходом блока 11 памяти, причем выход блока 11 памяти также соединен со входом блока 13 вычисления вектора отсчетов КФ амплитуды принятых радиолокационных сигналов и со вторым входом блока 12 вычисления нулевого момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов.
В конкретном примере реализации изобретения блоки 1-11, 20 представляют собой одноименные элементы, входящие в состав некогерентного метеорологического радиолокатора «Контур», выпускаемого ООО «Контур-НИИРС», Санкт Петербург. Блоки 12-19 могут быть реализованы либо с использованием сигнального процессора SHARK ADSP-21065LCS-240 (пр-во Analog Device), либо на основании микросхемы программируемой логики типа EP20K100QI240-2V (пр-во Altera) с использованием мегафункций фирмы производителя.
Устройство работает следующим образом.
Синхроимпульсы с первого выхода синхронизатора 1, следующие с периодом повторения зондирующих сигналов метеорологического радиолокатора Тr, подаются на блок 2 запуска, который формирует импульсы запуска передатчика 3. Высокочастотный импульсный зондирующий сигнал с выхода передатчика 3 поступает на первое плечо циркулятора 4. Пройдя во второе плечо циркулятора 4, этот сигнал подается в фидер антенны 5. Угловое положение антенны задается сигналом, поступающим с первого выхода блока 6 управления. Антенна 5 излучает радиолокационные импульсы в обследуемую зону атмосферы (разрешаемый объем). Отраженные от метеочастиц этой зоны сигналы принимаются антенной 5 и поступают на второе плечо циркулятора 4. Пройдя в плечо 3, эти сигналы приходят на вход приемника 7. Принятые сигналы в приемнике 7 подвергаются фильтрации, преобразованию частоты, усилению. Сигнал промежуточной частоты с выхода приемника поступает на амплитудный детектор 8. Выходной сигнал амплитудного детектора приемника 8 на видеочастоте поступает на первый вход АЦП 9, на синхронизирующий второй вход которого подаются импульсы со второго выхода синхронизатора 1. Частота повторения этих импульсов равна частоте дискретизации. В результате на выходе АЦП 9 образуется цифровой сигнал, который соответствует амплитуде принятого метеорологическим радиолокатором сигнала. Данный сигнал поступает на первый сигнальный вход блока 10 стробирования. На второй вход блока 10 стробирования поступают импульсы с третьего выхода синхронизатора 1. Благодаря этому обеспечивается селекция по дальности сигналов, отраженных от наблюдаемой области атмосферы. С выхода блока 10 стробирования отселектированные по дальности сигналы поступают в блок 11 памяти, который управляется синхроимпульсами с третьего выхода синхронизатора 1. Запомненные в блоке 11 памяти последовательности цифровых значений амплитуды А(mTr), m=0, 1,..., М, соответствующие одной дальности, вызываются по шине передачи данных в блок 13 вычисления КФ, где производится расчет КФ в соответствии с формулой

где K(nTr), n=1,..., N - значения корреляционной функции, N - количество рассчитываемых значений,  - среднее значение амплитуды принятого сигнала.
- среднее значение амплитуды принятого сигнала.
В итоге расчетов получается вектор отсчетов корреляционной функции амплитуды принятого сигнала k=(K(Тr),..., K(NTr))T, Т - оператор матричного транспонирования. Вектор k поступает на первые входы блоков 2 и 3, на вторые входы которых подаются соответственно векторы g0 и g2, которые равны первому и третьему столбцам матрицы: G=A(AHA)-1, где А - матрица размера N×N;  - элемент матрицы А, стоящий на пересечении m-й строки и n-го столбца m, n=1, 2,..., N, Н - оператор эрмитового сопряжения. В блоках 12 и 14 на основании соотношений
- элемент матрицы А, стоящий на пересечении m-й строки и n-го столбца m, n=1, 2,..., N, Н - оператор эрмитового сопряжения. В блоках 12 и 14 на основании соотношений  и
и  вычисляются нулевой и второй моменты спектральной плотности мощности амплитуды принятого сигнала. Далее моменты М2 и М0 поступают на входы блока 15 деления, где осуществляется вычисление их частного
вычисляются нулевой и второй моменты спектральной плотности мощности амплитуды принятого сигнала. Далее моменты М2 и М0 поступают на входы блока 15 деления, где осуществляется вычисление их частного  . Вычисленное частное подается последовательно на блок 16 умножения и блок 17 вычисления квадратного корня. На второй вход блока умножения 16 из блока 18 поступает масштабирующий коэффициент
. Вычисленное частное подается последовательно на блок 16 умножения и блок 17 вычисления квадратного корня. На второй вход блока умножения 16 из блока 18 поступает масштабирующий коэффициент  , где λ - рабочая длина волны метеорологического радиолокатора. В результате на выходе блока 17 образуется оценка среднеквадратического отклонения скорости ветра
, где λ - рабочая длина волны метеорологического радиолокатора. В результате на выходе блока 17 образуется оценка среднеквадратического отклонения скорости ветра 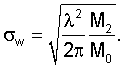
Вычисленное таким образом среднеквадратическое отклонение скорости ветра поступает в блок 19 сравнения, где производится сравнение вычисленного среднеквадратического отклонения скорости ветра σw с установленным пороговым уровнем σwnop. Для высокого уровня турбулизации исследуемой области атмосферы σwnop=5 м/с. Выход блока 19 сравнения подключен к входу 1 блока 20 индикации. На экране блока 20 осуществляется цветовая засветка элементов дальности, для которых σw превосходит установленный порог среднеквадратической скорости ветра σwnop=5 м/с. Положение высвечиваемых элементов дальности соответствует текущему положению антенного луча, информация о котором приходит на вход 2 блока 20 индикации из блока 6 управления.
Таким образом высвечиваемая на экране блока индикации 20 зона соответствует областям атмосферы, где уровень турбулентности воздуха превышает потенциально опасный порог.
Для реализации способа использовано известное оборудование, что обусловливает соответствие изобретения критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ АТМОСФЕРЫ | 2005 |
|
RU2293354C2 |
| СПОСОБ ОБНАРУЖЕНИЯ АТМОСФЕРНЫХ ОБЛАСТЕЙ С ВЫСОКИМ УРОВНЕМ ТУРБУЛЕНТНОСТИ С ИСПОЛЬЗОВАНИЕМ НЕКОГЕРЕНТНОГО МЕТЕОРОЛОГИЧЕСКОГО РАДИОЛОКАТОРА | 2005 |
|
RU2293353C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ШИРИНЫ СПЕКТРАЛЬНОЙ ПЛОТНОСТИ МОЩНОСТИ РАДИОСИГНАЛОВ КОГЕРЕНТНОГО МЕТЕОРОЛОГИЧЕСКОГО РАДИОЛОКАТОРА | 2005 |
|
RU2293351C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ АТМОСФЕРЫ | 1997 |
|
RU2128847C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| Способ измерения скорости полёта воздушного объекта и РЛС для его осуществления | 2015 |
|
RU2608748C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
| ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ ВЕТРА ДЛЯ ОБНАРУЖЕНИЯ СДВИГА ВЕТРА | 2011 |
|
RU2468387C1 |
Изобретение относится к радиолокационной метеорологии и может быть использовано для обнаружения областей с повышенной турбулентностью и количественной оценки и уровня турбулизации воздуха. Достигаемый технический результат - увеличение достоверности обнаружения атмосферных зон с повышенным уровнем турбулентности и обеспечение возможности его количественной оценки. Устройство содержит синхронизатор (1), блок запуска (2), передатчик (3), циркулятор (4), антенну (5), блок управления (6), приемник (7), блок стробирования (9), аналого-цифровой преобразователь (10), блок памяти (11), блок индикации (20), амплитудный детектор (8), блок вычисления нулевого момента (12), блок вычисления вектора отсчетов корреляционной функции (13), блок вычисления второго момента (14), блок деления (15), блок умножения (16), блок вычисления квадратного корня (17), генератор масштабного коэффициента (18), блок сравнения (19). 1 ил.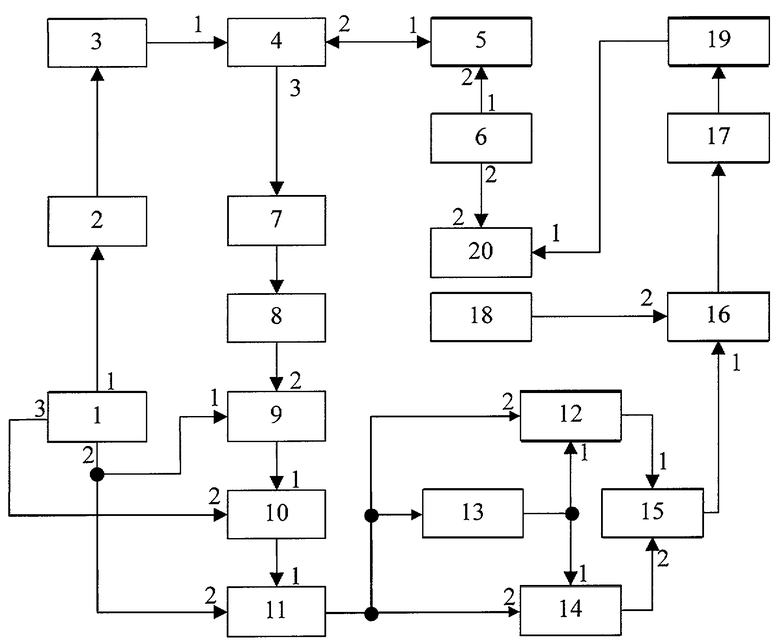
Устройство для определения состояния атмосферы, содержащее синхронизатор, блок запуска, передатчик, циркулятор, антенну с блоком управления, приемник, блок стробирования, аналого-цифровой преобразователь, блок памяти, блок индикации, при этом первый выход синхронизатора соединен со входом блока запуска, второй выход синхронизатора соединен с первым входом блока стробирования, выход которого соединен с первым входом аналого-цифрового преобразователя, третий выход синхронизатора соединен со вторым входом аналого-цифрового преобразователя, выход блока запуска соединен со входом передатчика, выход которого соединен с первым плечом циркулятора, второе плечо которого соединено с первым входом антенны, второй вход которой соединен с первым выходом блока управления, третье плечо циркулятора соединено со входом приемника, выход аналого-цифрового преобразователя соединен с первым входом блока памяти, отличающееся тем, что дополнительно введены амплитудный детектор, блок вычисления нулевого момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов, блок вычисления вектора отсчетов корреляционной функции амплитуды принятых радиолокационных сигналов, блок вычисления второго момента спектральной плотности мощности принятых радиолокационных сигналов, блок деления, блок умножения, блок вычисления квадратного корня, генератор масштабного коэффициента, блок сравнения, при этом второй выход синхронизатора соединен со вторым входом блока памяти, вход амплитудного детектора соединен с выходом приемника, а его выход соединен со вторым входом блока стробирования, второй выход блока управления соединен со вторым входом блока индикации, первый вход которого соединен с выходом блока сравнения, вход которого соединен с выходом блока вычисления квадратного корня, вход которого соединен с выходом блока умножения, второй вход которого соединен с выходом генератора масштабного коэффициента, а его первый вход соединен с выходом блока деления, первый вход которого соединен с выходом блока вычисления нулевого момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов, первый вход которого соединен с выходом блока вычисления вектора отсчетов корреляционной функции амплитуды принятых радиолокационных сигналов, который соединен также с первым входом блока вычисления второго момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов, выход которого соединен со вторым входом блока деления, а второй вход соединен с выходом блока памяти, причем выход блока памяти также соединен со входом блока вычисления вектора отсчетов корреляционной функции амплитуды принятых радиолокационных сигналов и со вторым входом блока вычисления нулевого момента спектральной плотности мощности амплитуды принятых радиолокационных сигналов.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ АТМОСФЕРЫ | 1997 |
|
RU2128847C1 |
| RU 94005004 А, 30.11.1994 | |||
| US 4835536, 30.05.1989 | |||
| US 3646555, 29.02.1972 | |||
| US 4015257, 29.03.1977. | |||

