Изобретение относится к области гидроакустики и может быть использовано для шумопеленгования и лоцирования подводного объекта (ПО) в натурном водоеме.
Известен волоконно-оптический шумопелегнатор (ВОШ), содержащий источник когерентного света, фотоприемник, три последовательно соединенные предметные волоконные катушки и три последовательно соединенные опорные волоконные катушки, оптически согласованные в интерферометр, снабженный фазосдвигающим устройством, размещенным в одной из волоконных катушек, при этом каждая из предметных волоконных катушек намотана с натягом на боковую поверхность пьезоцилиндра, каждый из которых подключен к своему генератору гармонических колебаний, и расположена на определенном расстоянии от соответствующей опорной волоконной катушки вдоль осей декартовой системы координат, выход фотоприемника через усилитель фототока подключен к трехканальному блоку обработки информации (БОИ), соединенному с компьютером, причем каждый канал БОИ включает в себя последовательно соединенные резонансный фильтр на частоту соответствующего генератора гармонических колебаний и демодулятор, при этом входы резонансных фильтров подключены к выходу усилителя фототока /патент РФ №2105992, кл. G01S 3/80, 1998/.
Данный шумопеленгатор принят за прототип.
Недостатком прототипа является ограниченность его применения для шумопеленгования и лоцирования ПО без определения кинематических характеристик движения ПО.
Техническим результатом, получаемым от внедрения изобретения, является расширение эксплуатационных возможностей известного ВОШ на случай измерения скорости движения ПО, а также определение траектории его движения и траверзного расстояния между ПО и ВОШ.
Данный технический результат достигают за счет того, что в известном ВОШ, содержащем источник когерентного света, фотоприемник, три последовательно соединенные предметные волоконные катушки и три последовательно соединенные опорные волоконные катушки, оптически согласованные в интерферометр, снабженный фазосдвигающим устройством, при этом каждая из предметных волоконных катушек намотана с натягом на боковую поверхность пьезоцилиндра, каждый из которых подключен к своему генератору гармонических колебаний, и расположена на определенном расстоянии от соответствующей опорной волоконной катушки вдоль осей декартовой системы координат, выход фотоприемника через усилитель фототока подключен к трехканальному БОИ, соединенному с компьютером, причем каждый канал БОИ включает в себя последовательно соединенные резонансный фильтр на частоту соответствующего генератора гармонических колебаний и демодулятор, при этом входы резонансных фильтров подключены к выходу усилителя фототока, каждый канал трехканального БОИ содержит дополнительный резонансный фильтр на частоту, много меньшую частот генераторов гармонических колебаний, частотный детектор, дифференцирующее устройство, два нуль-индикатора, управляемое множительное устройство, блок опорных напряжений, управляемый таймер и управляемый экстрематор, причем выход демодулятора соединен через последовательно соединенные дополнительный резонансный фильтр, частотный детектор, дифференцирующее устройство и первый нуль-индикатор с управляемым входом множительного устройства, первый основной вход которого подключен к выходу частотного детектора, второй - к блоку опорных напряжений, а выход - к первому входу компьютера, выход частотного детектора параллельно соединен также со вторым входом компьютера и входом второго нуль-индикатора, управляемый вход которого подключен к выходу управляемого экстрематора, а выход - к таймеру, соединенному выходом с третьим входом компьютера, четвертый вход которого подключен к выходу демодулятора, при этом дополнительно введены блок управления и управляемый переключатель, установленный в каждом из каналов между частотным детектором и дифференцирующим устройством, а опорные волоконные катушки помещены в смещаемый акустический экран с исполнительным механизмом, управляемый вход которого соединен с выходом блока управления, подключенным также выходом к управляемому входу экстрематора и управляемому входу переключателя.
Пары предметных и опорных волоконных катушек выполнены с возможностью поворота вокруг начала координат.
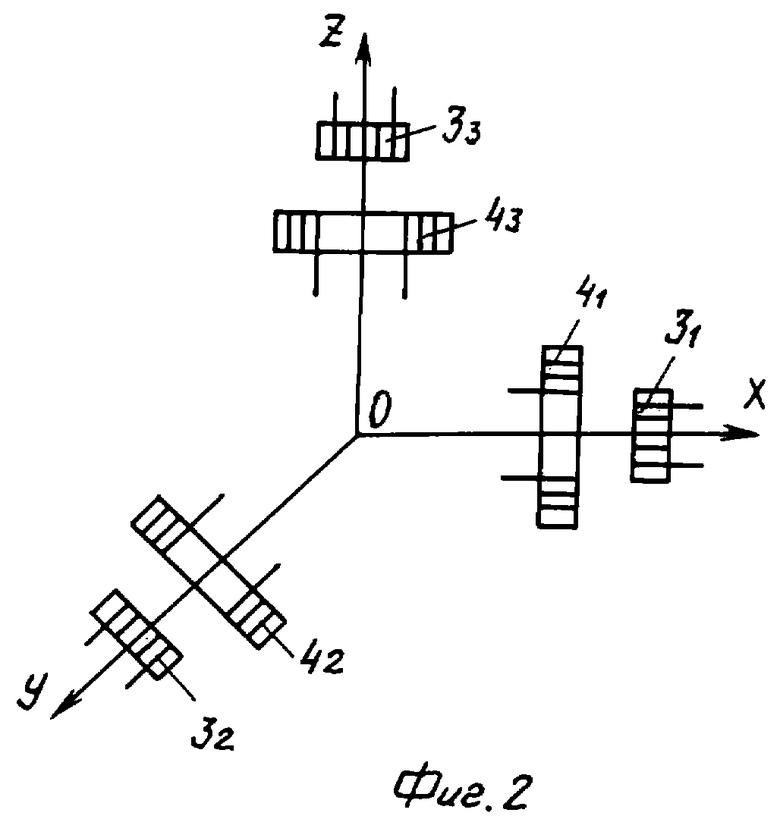
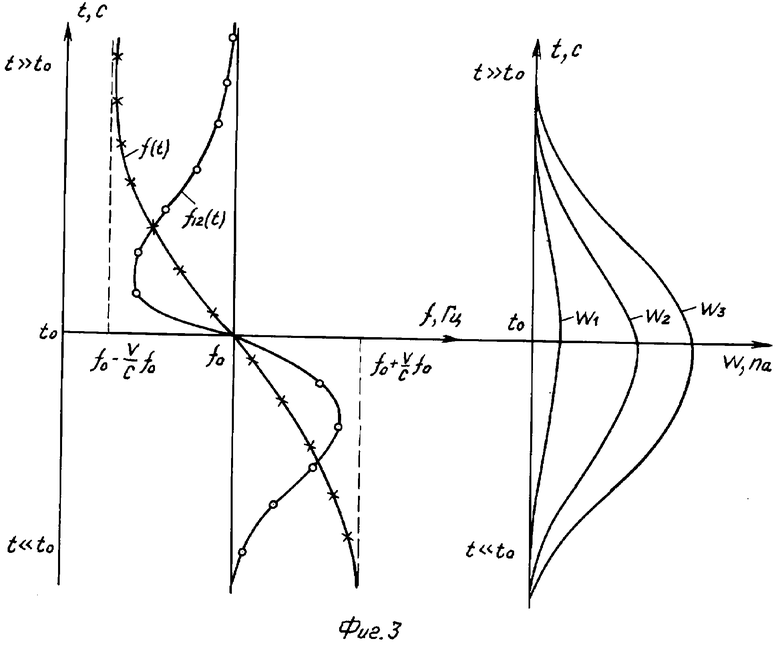
Изобретение поясняется чертежами. На фиг.1 представлена оптикоэлектронная схема ВОШ; на фиг.2 - пространственное расположение волоконных катушек; на фиг.3 - частотно-временные диаграммы для пояснения работ ВОШ.
ВОШ содержит (фиг.1) источник когерентного света 1, фотоприемник 2, три последовательно соединенные предметные волоконные катушки 31; 32; 33 и три последовательно соединенные опорные волоконные катушки 41; 42; 43.
Элементы 1, 2, 3, 4 оптически согласованы в интерферометр, с фазосдвигающим устройством 5, размещенным в одной из волоконных катушек (в одном из плеч интерферометра).
Каждая из предметных волоконных катушек 31, 32, 33 намотана с натягом на боковую поверхность пьезоцилиндров 61, 62, 63, подключенных к генераторам 71, 72, 73 гармонических электрических колебаний.
Предметные и опорные волоконные катушки 3 и 4 расположены на известном расстоянии друг от друга вдоль осей x, y, z декартовой системы координат (фиг.2).
Выход фотоприемника 2 подключен к усилителю 8 фототока, выход которого соединен с входом трехканального БОИ.
Каждый канал БОИ включает в себя последовательно соединенные резонансный фильтр 9 на частоту соответствующего генератора 7 гармонических колебаний, демодулятор 10, дополнительный резонансный фильтр 11, частотный детектор 12, дифференцирующее устройство 13 и нуль-индикатор 14. В каждый из каналов БОИ входят также множительное устройство 15, блок 16 опорных напряжений, нуль-индикатор 17, управляемый таймер 18, экстрематор 19. Причем управляемый вход множительного устройства 15 соединен с выходом нуль-индикатора 14, первый основной вход - выходом частотного детектора 12, а второй - с выходом блока 16 опорных напряжений.
Выход частотного детектора 12 подключен также к входу нуль-индикатора 17, управляемый вход которого соединен с выходом управляемого экстрематора 19, а выход с входом таймера 18.
ВОШ также включает в себя компьютер 20, блок 21 управления и в каждом из каналов БОИ управляемый переключатель (на чертеже не обозначен), установленный между частотным детектором 12 и дифференцирующим устройством 13. Управляемый вход переключателя соединен с выходом блока 21 управления, подключенного также к управляемому входу экстрематора 19.
Переключатель при этом отключает от электронной схемы канала блоки 13...16, обозначенные на фиг.1 в пунктирном квадрате. (Соединение блока 21 управления с управляемым входом переключателя показано путем соединения с этим пунктирным квадратом).
Опорные волоконные катушки 41, 42, 43 помещены в смещаемый акустический экран 22, состоящий из трех частей.
Каждая часть экрана (на чертеже не обозначена) соединена со своим исполнительным механизмом (на чертеже отсутствуют), управляемые входы которых подключены к выходу блока 21 управления.
Пары волоконных катушек 3, 4 выполнены с возможностью поворота вокруг начала координат.
Входы компьютера 20 подключены к выходам множительного устройства 15, к выходам частотного детектора 12, к выходам демодуляторов 10 и к выходам таймеров 18 каждого из каналов БОИ. (На фиг.1 показано выполнение только одного из каналов БОИ).
Существо работ ВОШ заключается в том, что при равномерном прямолинейном движении тонального гидроакустического источника частоты f0 относительно неподвижного приемника доплеровская зависимость частоты f(t) от времени t сигнала в точке наблюдения имеет вид:
где с - скорость звука в воде, м/с; V - скорость тонального источника, м/с; d0 - траверзное расстояние между тональным источником и гидроакустическим приемником (м) в момент времени t0(c) (траверзное время). То есть зависимость наблюдаемой частоты от времени является функцией, содержащей четыре параметра. Если значения функции f(t) каким-либо образом оценены для ряда временных отсчетов ti, то оценки параметров траектории могут быть получены на основе решения задачи нелинейной регрессии методом наименьших квадратов. /Д.Дж.Уайлд "Методы поиска экстремума". М.: "Наука", 1967, с.17-27/.
Модель регрессии задается выражением (1). Функционал метода наименьших квадратов имеет вид:

где Wi - весовая функция; f(ti) - измеренные значения частот /Ф.Гилл и др. "Практическая оптимизация". "Мир", 1985, с.104-110/.
Таким образом, задача получения оценок параметров траектории источника тонального сигнала разбивается на два этапа. На первом этапе выполняются измерения отсчетов функции частотной зависимости, затем - минимизация функционала (2) относительно параметров f0, V, d0, t0. Полученные в результате минимизации значения являются искомыми оценками.
В соответствии с выражением (1) f(t) при больших отклонениях t от t0, когда t0≪t≪t0, изменяется медленно. Поэтому, с точки зрения оптимизации точностных характеристик оценок и времени выполнения минимизации функционала (2) информативный участок частотной зависимости следует ограничить значениями t, при которых f(t) отличается от асимптотического значения на величину, сравнимую с погрешностями измерения частоты.
В момент времени t0 частота наблюдаемого сигнала равна f0. Это позволяет обнаружить момент траверза прохождения излучателем точки траверза. А в моменты времени t0≪t≪t0 появляется возможность определить скорость движения ПО по формуле:

И уже при известности f0, V, t0, с, f(t) появляется возможность определить по формуле (1) траверзное расстояние d0 между источником тонального сигнала и гидроакустическим приемником, т.е. между ПО и ВОШ.
Если тональный источник звука движется относительно двух гидроакустических приемников, образующих интерферометр, то мгновенная разностная доплеровская частота f12(t) будет иметь вид:

где d01 и d02 - траверзные расстояния между тональным источником и гидроакустическим приемником (у нас волоконными катушками 3 и 4), в моменты времени t01 и t02.
Двухточечный прием тонального сигнала в отличие от одноточечного позволяет более точно определить время траверза t0, а значит и траверзные расстояния d01, d02, d0, поскольку частотно-временная зависимость, называемая частотно-временным следом (ЧВС), в области траверза более крутая. Кроме того, при двухточечном приеме на результаты проводимых измерений меньше сказывается нестабильность выделенной тональной составляющей f0.
На частотно-временных диаграммах (фиг.3) представлены ЧВС для одноточечного и двухточечного приемов (слева).
Работа ВОШ осуществляется поочередно в двух режимах. Режимы работы задаются блоком управления 21, выполненным в виде генератора импульсов.
В первом режиме акустический экран 22 закрыт и на опорные катушки 4 исследуемый шум ПО не попадает. При этом предметные катушки 3 интерферометра работают как гидрофоны.
С помощью фазосдвигающего устройства 5 устанавливают начальную разность фаз, равную 90°. Подают на пьезоцилиндры 61, 62, 63 гармонические электрические колебания ω1, ω2, ω3 от генераторов 71, 72, 73 электрических колебаний. Данные частоты в качестве несущих воспринимаются предметными катушками 31, 32, 33, расположенными по осям х, у, z декартовой системы координат. Составляющие шума ПО W1, W2, W3 воспринимаются предметными катушками 31, 32, 33 как моделирующие сигналы на различных несущих частотах ω1, ω2, ω3.
С помощью резонансных фильтров 9, настроенных на несущие частоты, принятые сигналы воспринимаются по трем каналам БОИ, в которых сигналы W1, W2, W3 детектируются с помощью демодуляторов 10. Вид принятых сигналов представлен на фиг.3, справа.
Принятые сигналы в одноточечном приеме подаются на резонансные фильтры 11, настроенные на частоту f0≥500 Гц, но значительно меньшую несущих частот ω≅(20-100) кГц. Это обусловлено тем, что на низких частотах и малых скоростях движения ПО величина доплеровского сдвига частот мала.
Таким образом, резонансные фильтры 11 выделяют стабильную дискретную составляющую f0. Частотный детектор 12 каждого из каналов прослеживает изменение мгновенной доплеровской частоты f'(t)=f(t)- f0, которая одновременно направляется на дифференцирующее устройство 13, нуль-индикатор 17 и компьютер 20. Затем продифференцированный сигнал по доплеровской частоте направляется на нуль-индикатор 14 и управляемый вход множительного устройства 15, где перемножается с сигналом, пропорциональным величине  задаваемым блоком 16 опорных напряжений в момент, когда
задаваемым блоком 16 опорных напряжений в момент, когда  При этом реализуется алгоритм, задаваемый уравнением (3).
При этом реализуется алгоритм, задаваемый уравнением (3).
Полученное значение V подается на вход компьютера 20.
Значение V по всем каналам будет одно и то же, но получено с различной точностью. Компьютер 20 выбирает значение V, полученное в канале, в котором соотношение сигнал/шум было наибольшим (на фиг.3 - в третьем канале).
Одновременно с помощью нуль-индикатора 17 таймер 18 выдает время, при котором f'(t)=0, т.е. траверзное время, которое также направляется на вход компьютера 20, который по алгоритму (1) определяет траверзное расстояние d0.
Данное расстояние d0 является важнейшей характеристикой ПО, поскольку часто именно в момент времени t0 требуется принять соответствующее решение по отношению к ПО со стороны средств обнаружения.
Для уточнения полученного расстояния d0 интерферометр переводят в режим двухточечного приема тонального сигнала. Для этого с блока 21 управления на исполнительные механизмы акустических экранов 22 подают сигнал, устраняющий экраны.
ВОШ переходит в двухточечный режим работы с векторными приемниками. В этом режиме блок управления 21 включает экстрематор 19 и отключает блоки 13...16.
При этом на входы компьютера 20 поступает разностная доплеровская частота f12(t) и значения времен t01, t02. При известности остальных параметров по формуле (4) определяются траверзные расстояния d01, d02, что позволяет уточнить траекторию движения ПО.
На фиг.3, слева, представлен ход ЧВС движения тонального источника для двухточечного приема сигнала f12(t), полученная в моменты времени t, не совпадающие с моментами времени получения ЧВС для одноточечного приема f(t). (Точки и звездочки на частотно-временных следах имеют чередующуюся последовательность).
Таким образом, ВОШ позволяет расширить эксплуатационные возможности прототипа за счет измерения кинематических характеристик ПО. Дополнительный поворот пар катушек вокруг начала координат 0 позволяет настроить ВОШ на оптимальное соотношение сигнал/шум и тем самым повысить точность пеленгования ПО.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2284543C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ХАРАКТЕРИСТИКИ НАПРАВЛЕННОСТИ ГИДРОАКУСТИЧЕСКОГО ИЗЛУЧАТЕЛЯ (ВАРИАНТЫ) | 2004 |
|
RU2271618C2 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ АНТЕННА | 1995 |
|
RU2112248C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПОЛЕЙ СКОРОСТЕЙ МОРСКИХ ТЕЧЕНИЙ | 1995 |
|
RU2105986C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2105992C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ МОРСКОГО ТЕЧЕНИЯ | 2004 |
|
RU2297007C2 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК | 1996 |
|
RU2105990C1 |
| ЖИДКОСТНОЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2253872C1 |
| КОМПАС С ВОЛОКОННО-ОПТИЧЕСКИМИ СВЕТОВОДАМИ И ДИСТАНЦИОННЫМ СЪЕМОМ ПОКАЗАНИЙ | 2004 |
|
RU2296949C2 |
| СИСТЕМА ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ЗЕМЛЕТРЯСЕНИЯХ И ЦУНАМИ | 2007 |
|
RU2349939C1 |
Изобретение относится к области гидроакустики и может быть использовано для шумопеленгования и лоцирования подводного объекта (ПО) в натурном водоеме. Существо изобретения заключается в том, что три пары предметных и опорных волоконных катушек, расположенных локально вдоль координатных осей, объединены в один интерферометр. На предметные волоконные катушки подаются различные несущие частоты. Принимаемый шум демодулируется и подвергается обработке с целью определения координат ПО. Специальная электронная схема позволяет определить также скорость и траекторию движения ПО. Достигаемый технический результат заключается в расширении эксплуатационных возможностей. 1 з.п. ф-лы, 3 ил.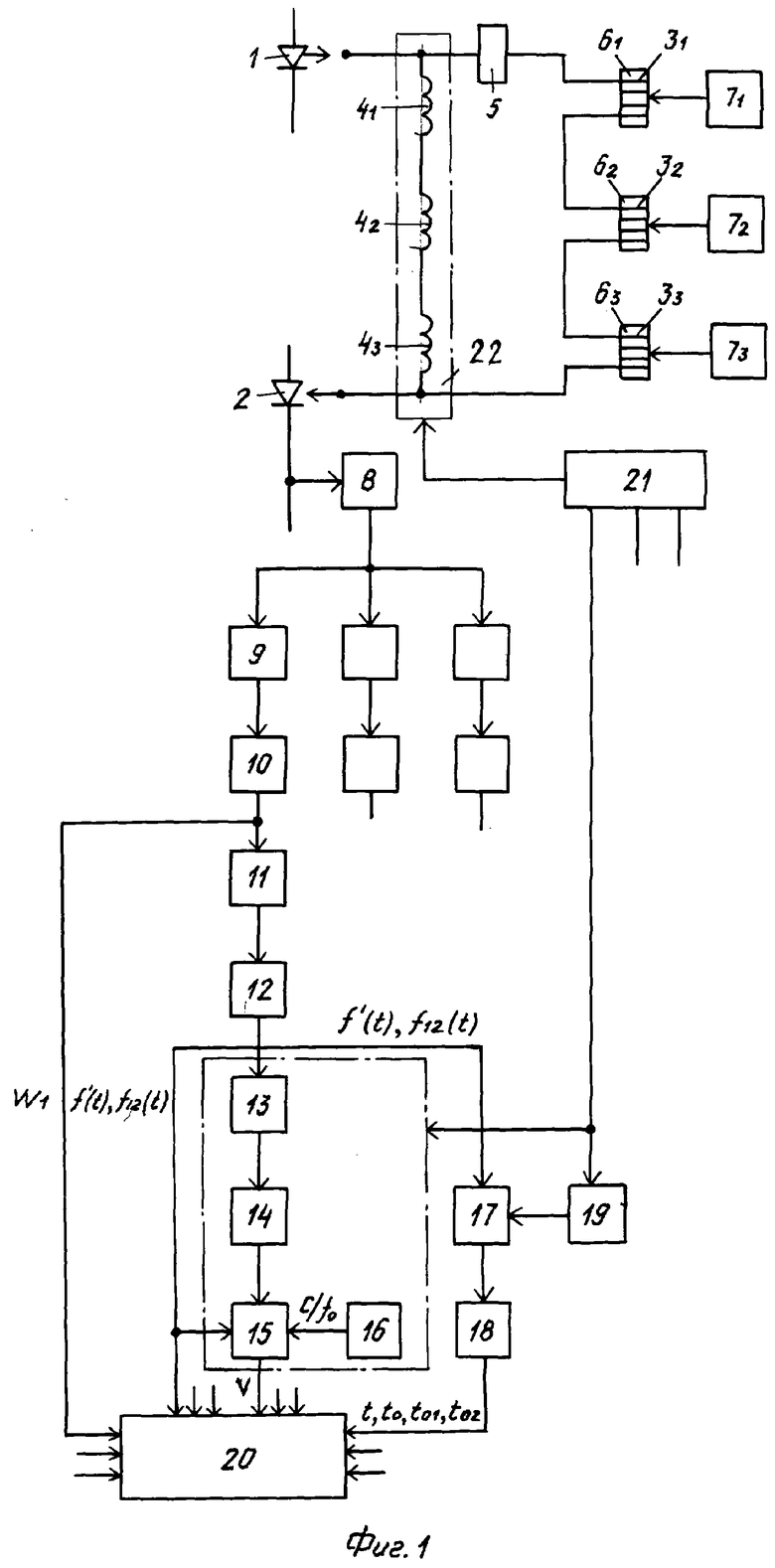
| ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2105992C1 |
| ПОРТАТИВНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2000 |
|
RU2176091C1 |
| ГИДРООПТИЧЕСКАЯ АППАРАТУРА ДЛЯ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2193213C1 |
| US 4279027, 14.07.1981 | |||
| US 5457662 А, 10.10.1995. | |||

