Изобретение относится к области гидроакустики и может быть использовано для определения пространственных координат и кинематических характеристик движущегося шумящего подводного объекта (ПО).
Известен шумопеленгатор, содержащий несколько (например, три) векторных приемника (например, градиентных гидрофона), ориентированных своими характеристиками направленности (ХН) по декартовой системе координат, выходы которых через соответствующие последовательно соединенные усилители и полосовые фильтры подключены к входам трехканального блока обработки информации, соединенного своими выходами с входами компьютера, причем выходы каждого из усилителей подключены к первым трем входам компьютера.
/Патент США №4279027, кл. 367-125 (G 01 S 3/80), 1981/.
Данный шумопеленгатор принят за прототип.
Недостатком прототипа является ограниченность его применения случаем определения местоположения источника шумоизлучения без определения кинематических характеристик движущегося ПО (траектории движения, скорости, траверзного расстояния).
Техническим результатом, получаемым от внедрения изобретения, является получение информации о кинематических характеристиках движущегося ПО, таких как траектория движения ПО относительно неподвижного гидроакустического приемника, скорости движения ПО, траверзное расстояние между ПО и акустическим приемником.
Данный технический результат достигают за счет того, что в известном шумопеленгаторе, содержащем три векторных приемника (ВП), ориентированных своими ХН по декартовой системе координат, выходы которых через соответствующие последовательно соединенные усилители и полосовые фильтры подключены к входам трехканального блока обработки информации (БОИ), соединенного своими выходами с входами компьютера, причем выходы каждого из усилителей подключены к первым трем входам компьютера, принимающим сигналы подводного шума от соответствующего канала, компьютер выполнен с возможностью определения соответствующих углов, траверзного расстояния и скорости тонального гидроакустического сигнала, каждый из каналов трехканального БОИ выполнен в виде частотного детектора, дифференцирующего устройства, первого и второго нуль-индикаторов, управляемого множительного устройства, блока опорных напряжений и таймера, при этом в каждом канале БОИ выход полосового фильтра соединен через последовательно соединенные частотный детектор, дифференцирующее устройство и первый нуль-индикатор с управляемым входом множительного устройства, первый вход подключен к выходу частотного детектора, второй - к выходу блока опорных напряжений, а выход в каждом из каналов - соответственно к четвертому, пятому и шестому входам компьютера, принимающим значения скорости источника, измеренные в соответствующем канале, седьмой, восьмой и девятый входы, принимающие значения доплеровских частот соответствующего канала, соединены в каждом из каналов БОИ с выходами соответствующего частотного детектора, подключенного также выходом через второй нуль-индикатор к управляемому входу таймера, выход которого в каждом из каналов БОИ соединен соответственно к десятым, одиннадцатым и двенадцатым входами компьютера, принимающим значения траверзного времени соответствующего канала.
В частном случае ВП могут быть выполнены с возможностью поворота вокруг начала осей декартовой системы координат.
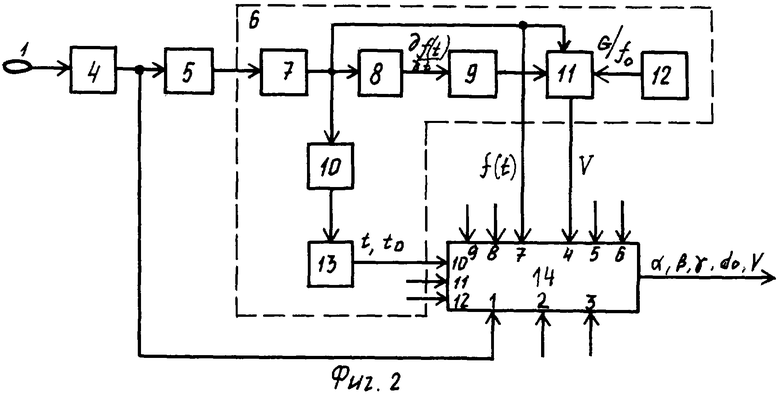
Изобретение поясняется чертежами. На фиг.1 представлена общая схема расположения ВП шумопеленгатора к ПО; на фиг.2 - электронная схема шумопелегнатора; на фиг.3 - временные и время-частотные диаграммы для пояснения работы шумопеленгатора.
Шумопеленгатор содержит три ВП 1, 2, 3, ориентированных своими ХН по декартовой системе координат (фиг.1).
Выходы каждого ВП через соответствующие последовательно соединенные усилитель 4 и полосовой фильтр 5 на частоту f0 подключены к входам трехканального БОИ 6 (фиг.2).
(На фиг.2 приведено выполнение электронной схемы на базе одного векторного приемника и одного канала БОИ. Две другие части электронной схемы шумопеленгатора полностью совпадают с описанной ниже).
Каждый из каналов трехканального БОИ 6 выполнен в виде частотного детектора 7, дифференцирующего устройства 8, нуль-индикаторов 9, 10, управляемого множительного устройства 11, блока 12 опорных напряжений и таймера 13. Все выходы каждого из трех БОИ подключены к входам компьютера 14.
Схема электрических соединений электронной схемы шумопеленгатора представлена на фиг.2.
Выход усилителя 4, а также соответствующие усилители двух других ВП подключены к первым трем входам компьютера 14. (Для ясности входы компьютера 14 оцифрованы маленькими арабскими цифрами).
Выход полосового фильтра 5 в каждом из трех каналов БОИ соединен через последовательно соединенные частотный детектор 7, дифференцирующее устройство 8, нуль-индикатор 9 с управляемым входом множительного устройства 11, первый основной вход которого подключен к выходу частотного детектора 7, второй - к выходу блока 12 опорных напряжений, а выход (в каждом из каналов БОИ) соответственно - к четвертому, пятому и шестому входам компьютера 14.
Седьмой, восьмой и девятый входы компьютера 14 соединены с соответствующим частотным детектором (на фиг.2 - частотным детектором 7).
Частотные детекторы каждого из каналов подключены также через свой нуль-индикатор к управляющему входу соответствующего таймера (на фиг.2 - через нуль-индикатор 10 - к таймеру 13).
Выходы таймеров каждого БОИ соединены соответственно с десятым, одиннадцатым и двенадцатым входами компьютера 14.
Принцип работы шумопеленгатора основан на том, что при условиях равномерного прямолинейного движения источника тонального гидроакустического сигнала относительно неподвижных приемников наблюдаются мгновенные доплеровские частоты f(t), описываемые следующим параметрическим уравнением:
где f0 - частота тонального источника, (Гц); V - скорость источника, (м/с); с - скорость звука в воде, (м/с); t - текущее время, (с); d0 - траверзная дистанция, (м), получаемая соответственно на траверзном времени t0, (с).
Таким образом, зависимость (1) наблюдаемых доплеровских частот f(t) содержит четыре параметра t0, d0, t, V, которые можно определить экспериментально с помощью предлагаемого шумопеленгатора (при известных значениях f0 и с).
При этом если значение функции (1) каким-либо образом оценены для ряда временных отсчетов ti, то оценки кинематических параметров движения тонального источника могут быть получены на основе решения задачи нелинейной регрессии методом наименьших квадратов [Д.Дж.Уайлд. "Методы поиска экстремума". М., Изд-во "Наука", 1967, с.17-27].
Модель регрессии задается уравнением (1). Функционал метода наименьших квадратов имеет вид:

где Wi - весовые функции;  - измеренные значения частот [Ф.Гилл и др. "Практическая оптимизация". М., "Мир", 1985, с.104-110].
- измеренные значения частот [Ф.Гилл и др. "Практическая оптимизация". М., "Мир", 1985, с.104-110].
Шумопеленгатор работает следующим образом. Шумящий ПО 15 (фиг.1) движется со скоростью V относительно ВП 1, 2, 3. ПО 15 излучает подводный шум W, принимаемый ВП 1, 2, 3 под углами α, β, γ.
При этом после усиления в усилителе 4 (а также соответствующих усилителях ВП 2 и 3) сигналы W1, W2, W3 направляются на компьютер 14, который после соответствующей обработки выдает на выходе значения углов α, β, γ, задающих пространственное положение ПО 15.
С помощью полосового фильтра 5 из шумоизлучения ПО 15 выделяется дискретная составляющая f0 и с помощью БОИ 6 прослеживаются изменения доплеровской частоты f(t) во времени t.
Частотный детектор 7 выделяет доплеровскую частоту f(t) и направляет ее значение на компьютер 14 (входы 7, 8, 9), на дифференцирующее устройство 8 и на нуль-индикатор 10.
Согласно уравнения (1), когда значение производной доплеровской частоты равно нулю, то значение
Это происходит на временах t0≪t≪t0, когда значение доплеровской частоты постоянно.
Отсюда из уравнения (3) можно найти скорости ПО 15

поскольку V≪с.
Множительное устройство 11 перемножает значения f(t) и c/f0 в момент, когда нуль-индикатор 9 подает на его управляющий вход нулевой сигнал.
Очевидно, что все ВП 1, 2, 3 выдадут одно и то же значение V, но с различной погрешностью. Наиболее точное значение V выдает ВП, имеющий наибольшую весовую компоненту W шумоизлучения. Что и учитывается при обработке сигналов на компьютере 14.
Дифференцирующее устройство 10 в момент t0 выдает на таймер 13 командный сигнал. В этот момент ПО 15 проходит траверзное расстояние d0 между ПО 15 и ВП 1, 2, 3. Значение доплеровской частоты в данный момент f(t)=0, согласно уравнения (1). Значения траверзного времени t0 подается на компьютер по трем каналам. Аналогично компьютером 14 выбирается значение времени t0, измеренное с наибольшей точностью.
Затем по алгоритму (1) компьютер 14 вычисляет значение траверзного расстояния d0, являющегося важнейшим параметром для принятия дальнейших решений по отношению к запеленгованному ПО.
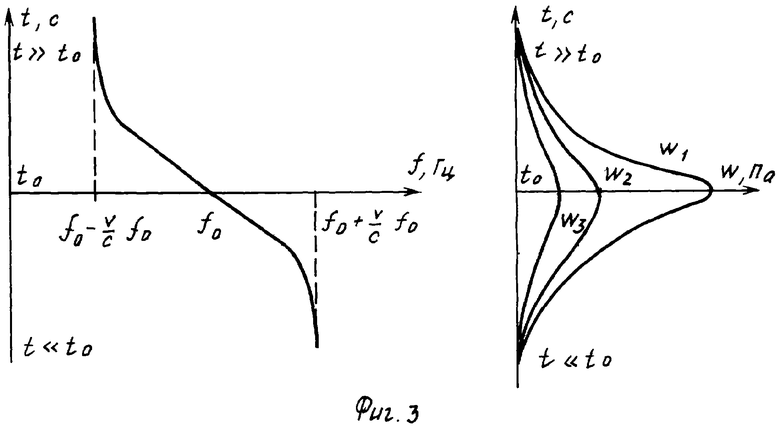
На фиг.3 представлен типичный ход частотно-временного следа (ЧВС), зафиксированного тремя ВП 1,2,3 (слева), и кривые прохода W1, W2, W3 (справа) ПО 15 векторных приемников 1, 2, 3, по которым определяется положение объекта.
Для увеличения точности измерений ВП 1, 2, 3 выполняют с возможностью контролируемых угловых поворотов приемников вокруг каждой оси.
ВП поворачивают таким образом, чтобы ХН одного из них была бы направлена на ПО 15. При этом выходной сигнал этого ВП будет максимальным, что приводит к увеличению точности измерений требуемых параметров: α, β, γ, d0, V.
Таким образом, описанный шумопеленгатор позволяет помимо определения пространственного положения ПО, определить также его кинематические характеристики, чем достигается поставленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2004 |
|
RU2297012C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ХОДОМ СОРЕВНОВАНИЙ ПОДВОДНЫХ ПЛОВЦОВ (ВАРИАНТЫ) | 2004 |
|
RU2284547C2 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| Приемник тональных сигналов | 1987 |
|
SU1510109A1 |
| СПОСОБ ПРОВЕДЕНИЯ ПРОСТРАНСТВЕННО-ВРЕМЕННОГО МОНИТОРИНГА СОРЕВНОВАНИЙ САМОДВИЖУЩИХСЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАТУРНОМ ВОДОЕМЕ | 2004 |
|
RU2284546C1 |
| ПАНОРАМНЫЙ АСИНХРОННЫЙ РАДИОПРИЕМНИК | 2008 |
|
RU2380717C1 |
| Устройство для измерения комплексных коэффициентов передачи и отражения СВЧ-устройств с преобразованием частоты | 2018 |
|
RU2687980C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ ВХОДНОГО СИГНАЛА ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2007 |
|
RU2344430C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ ВХОДНОГО СИГНАЛА ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2004 |
|
RU2279097C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ ТОНАЛЬНОГО НАБОРА | 2000 |
|
RU2178950C2 |
Изобретение относится к области гидроакустики и может быть использовано для определения пространственных координат и кинематических характеристик движущегося шумящего подводного объекта (ПО). Технический результат заключается в получении информации о кинематических характеристиках движущегося ПО. Технический результат достигается тем, что в известном шумопеленгаторе, содержащем три векторных приемника, ориентированных своими характеристиками направленности по декартовой системе координат, усилители, полосовые фильтры, трехканальный блок обработки информации и компьютер, компьютер выполнен с возможностью определения соответствующих узлов, траверзного расстояния и скорости источника тонального гидроакустического сигнала, каждый из каналов трехканального блока обработки информации выполнен в виде частотного детектора, дифференцирующего устройства, первого и второго нуль-индикаторов, управляемого множительного устройства, блока опорных напряжений и таймера. 1 з.п. ф-лы, 3 ил.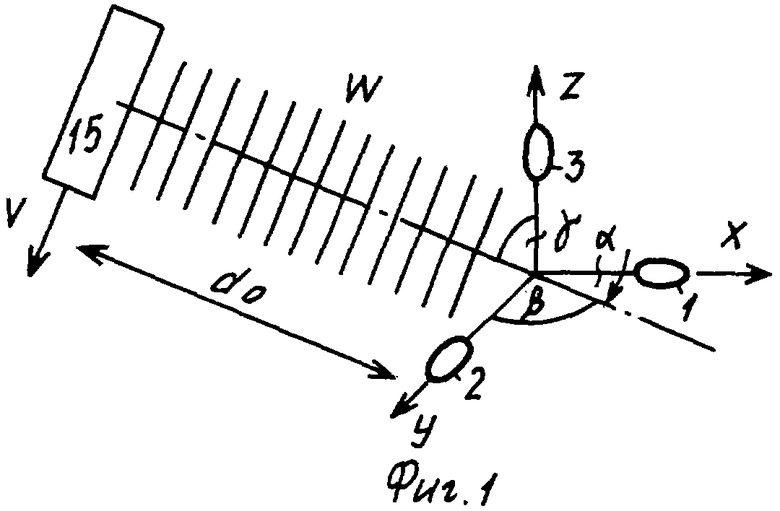
| US 4279027, 14.07.1981 | |||
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| 0 |
|
SU157550A1 | |
| US 4594694, 10.06.1986 | |||
| JP 3257331, 15.11.1991 | |||
| JP 59108972, 23.06.1983. | |||

