Изобретение относится к методам и устройствам обработки данных в широкополосной радиосвязи и радионавигации, где этапу приема информационных сигналов с расширенным спектром (СРС), манипулированных некоторой псевдослучайной последовательностью (ПСП), обязательно предшествует этап синхронизации. Сущность этапа синхронизации в определении на приемной стороне временной задержки принимаемого сигнала относительно опорного - формируемого в корреляционном обнаружителе (т.е. поиск сигнала по задержке) а также в определении истинной частоты сигнала [1, 2].
Требуемым результатом при реализации поиска СРС следует считать обеспечение комплекса признаков [1, 2]:
- минимизация временных и аппаратных затрат на реализацию способа поиска сигнала.
- обеспечение требуемых (приемлемых для достоверной обработки) корреляционных и имитостойких свойств используемых ПСП.
Известны способы поиска СРС по задержке, использующие для сокращения среднего времени поиска априорную информацию о расположении и структуре сегментов ПСП [2]. Текущая задержка сигнала может быть определена по пороговому обнаружению значения взаимокорреляционной функции между некоторой короткой опорной последовательностью и закономерно расположенным сегментом аналогичной структуры принимаемого сигнала [2].
Наиболее близким к заявляемому является способ поиска СРС, существенными признаками которого являются весовое суммирование откликов нескольких цифровых согласованных фильтров, настроенных на несколько различных сегментов ПСП с априорно известной структурой, обладающих минимальной взаимной корреляцией по отношению друг к другу и неравномерно расположенных по длине принимаемой манипулирующей последовательности [3]. Веса суммирования определяются порядком расположения сегментов, а текущая задержка сигнала определятся по факту превышения порогового значения взвешенной суммой откликов согласованных фильтров.
Сходным признаком данного способа [3] с заявляемым является использование априорной информации о соотношении значений номера такта текущей задержки принимаемого сигнала и такта обнаружения суммарных значений взаимной корреляции между принимаемыми и опорными последовательностями.
С точки зрения обеспечения вышеуказанного технического результата известный способ обладает рядом недостатков:
- сокращение среднего времени поиска лишь при близких к идеальным помеховых условиях, когда вероятность ложного обнаружения или пропуска сегмента ПСП очень мала;
- применение ограниченного класса ПСП, подробно изученных с точки зрения взаимокорреляционных свойств составляющих сегментов;
- значительные аппаратные затраты на построение блока цифровых согласованных фильтров для поиска ПСП большой длины.
Известно устройство для синхронизации шумоподобных сигналов [4], решающее задачу поиска сигнала с использованием двух каналов квадратурной обработки с аналого-цифровыми и цифроаналоговыми преобразователями, циклическими накопителями и вычислителями корреляционной функции, что позволяет считать данное устройство наиболее близким аналогом к заявляемому устройству поиска как по составу, так и решаемой задаче. Однако данное устройство повышает скорость поиска сигнала лишь за счет повышения помехозащищенности этапа обнаружения состояния синхронизма, но при этом не реализуется алгоритм ускоренного поиска, оптимизирующий порядок анализа области неопределенности сигнала по задержке либо, как в заявляемом устройстве, учитывающий особенности и закономерности структуры используемых манипулирующих псевдослучайных последовательностей.
Заявляемый способ ускоренного поиска и реализующее его устройство решают задачу быстрого поиска по задержке сигналов, манипулированных производными нелинейными последовательностями (ПНП) [5]. Этот класс последовательностей в сравнении с традиционно используемыми линейными ПСП (М-последовательности и производные от них) обладает существенными потенциальными преимуществами: большим числом длин, для которых они существуют, высокой структурной скрытностью, особыми корреляционными свойствами, позволяющими успешно реализовывать как традиционные, так и новые эффективные алгоритмы обработки сигналов на их основе. Использование свойств именно ПНП заложено в основу заявляемого способа поиска по задержке и обеспечивает достижение комплекса характеристик, определяющих лучший технический результат, а именно:
- обусловленная правилом построения кодовая структура ПНП позволяет реализовать заявляемый способ быстрого поиска и обеспечивает сокращение времени поиска СРС по задержке;
- за счет применения ПНП корреляционные свойства СРС при больших и сверхбольших длинах близки к оптимальным;
- обеспечивается высокая имитостойкость синхросигналов и наиболее уязвимого для помех этапа поиска СРС в радиолинии;
- реализация способа не требует выбора ПСП на основе знания структуры их различных сегментов - в качестве опорных сегментов используются отрезки сигнала, длины которых определяются длинами двух производящих компонент, а структура неуправляемо изменяется с каждым тактом обработки в реальном времени;
- реализующее поиск устройство может быть построено с применением элементов акустоэлектронной техники, удовлетворяющих жестким требованиям на энергоемкие, временные и массогабаритные показатели [6].
В основе реализации заявляемого способа и устройства лежат особенности кодовой структуры ПНП, обусловленные их правилом формирования.
Согласно [5] ПНП 2-го порядка (называемыми также двукратными производными нелинейными рекуррентными последовательностями - ПНЛРП) вида W длины L называются последовательности, которые образуются из 2-х производящих линеек (ПЛ) - повторяющихся производящих компонент (простых нелинейных рекуррентных последовательностей - НЛРП) длин L1 и L2 (L1<L2) вида Vi, j=1,2 по правилу (1):

V1 и V2 - производящие линейки НЛРП;
 - двоичный символ (0 или 1) с номером i, взятым по модулю длины L1 периодически повторяющейся НЛРП.
- двоичный символ (0 или 1) с номером i, взятым по модулю длины L1 периодически повторяющейся НЛРП.
Правило формирования двукратных ПНП иллюстрирует фиг.1.
В качестве производящих компонент (ПК) используются НЛРП двух типов: известные коды квадратичных вычетов (ККВ) с числом символов L1∈l и L2∈l: где l=4х+1 (тип К1), l=4х+3 (тип К3), а также характеристические коды (ХК) с числом символов l=4х (тип Х0), l=4х+2 (тип Х2), х=1, 2, 3,... [7]. Типы ПНП определяются сочетанием типов производящих компонент.
Способ поиска основан на свойстве ПНП, установленном в результате машинного имитационного моделирования и состоящем в том, что периодическая взаимокорреляционная функция (ПВКФ) ПНП различных типов с производящими линейками, составленными из повторяющихся ККВ или ХК одного типа и длины, имеет до 3-х фиксированных уровней в зависимости от рассматриваемых ПСП. Их значения приведены в таблице на фиг.2. На фиг.3 а и б соответственно приведены подтверждающие справедливость соотношений таблицы фиг.2 графики зависимости ПВКФ ПНП типа К3К3 длины L=77 с производящей линейкой, составленной из ККВ L2=11 (а) и ПВКФ ПНП типа К3К1 длины L=221 с производящей линейкой, составленной из ККВ L2=17 (б).
Наличие выраженной взаимной корреляции ПНП с их ПК при взаимных сдвигах, кратных периодам L1 и L2 этих производящих компонент, используется для установления синхронизма по задержке с ПНП с точностью до единиц длин L1 и L2 сегментов, порожденных в ПНП соответствующими ПК согласно правила (фиг.1). Как видно из таблицы фиг.2, для реализации способа поиска СРС по задержке, основанного на установлении синхронного во времени состояния с каждой ПК по ярко выраженным значениям ПВКФ с ней, целесообразно использовать ПНП, построенные из производящих компонент типа К3 и К1. Это объясняется наличием выраженной взаимной корреляции ПНП с обеими ПЛ этих типов. Из правила построения ПНП (фиг.1) очевидно, что по сочетанию номеров тактов синхронизма ПНП отдельно с каждой из двух ПЛ, определенных на одном периоде обработки сигнала, может быть установлена текущая задержка всей ПНП (т.е. номер текущего такта взаимного сдвига принимаемой и опорной последовательностей).
Однако в результате воздействия помех структура принимаемого сигнала может быть искажена настолько, что вероятность правильного выбора выраженных значений ПВКФ с ПЛ в тактах сдвига, кратных длинам ПК, за один период анализа будет очень мала. Для ее повышения требуется реализовать накопление ПВКФ с периодом L1 и L2 относительно L1 и L2 начальных сдвигов соответственно. При этом следует ожидать, что в тактах, кратных L1 и L2, будет происходить накопление ПВКФ, а в остальных тактах за счет случайных колебаний ПВКФ вокруг некоторого среднего значения накопления не произойдет.
Заявляемый способ поиска СРС характеризуется приведенной в алгоритме фиг.4 и описанной ниже совокупностью действий.
Поиск начинается со случайного взаимного сдвига l0 опорных ПЛ относительно начала ПНП, при этом накопленная ПВКФ ПНП с каждой ПЛ равна нулю (R∑1i=0 и R∑2j=0 для всех i и j начальных сдвигов относительно l0; i=0,1, ...L1-1; j=0,1,...L2-1), номер текущего такта l=1, номерам текущих сдвигов i и j присваиваются нули (блок 1).
С 1-м тактом (блок 2) в устройстве поиска получают значения ПВКФ как результаты корреляции сегментов длин L1 (для ПЛ-1) и L2 (для ПЛ-2) принимаемого и опорных сигналов, и сохраняют их с номерами i и j.
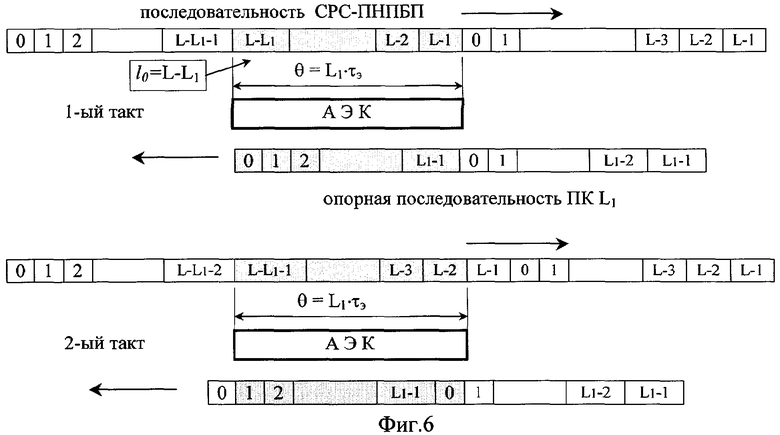
Со 2-м тактом встречного движения принимаемого и опорных сигналов получают и сохраняют с номерами i=i+1 и j=j+1 результаты корреляции сегментов, сдвинутых в противоположные стороны на 1 такт относительно сегментов, обрабатываемых на предыдущем такте (на фиг.6 а и б, в качестве согласованного фильтра рассматривается АЭК). Подобная процедура реализуется до i=L1-1 и j=L2-1.
Со следующим тактом значения i и j обнуляют (блоки 6, 7), а полученные на них ПВКФ суммируют с уже хранящимися в памяти для нулевых i и j.
Накопление значений ПВКФ (блоки 2, 4, 5) на каждом l-м такте, следующем с периодами ПК L1 и L2 относительно каждого из L1 значений i и L2 значений j, производят до выполнения условия l=L·Р, где Р - число периодов накопления ПВКФ (блок 3).
Из L1 и L2 накопленных в каналах значений ПВКФ производят выбор максимальных значений R∑1imax и R∑2jmax (блок 8) и фиксируют соответствующие им номера сдвигов imax и jmax относительно начальных нулевых, соответствующих l0.
Для формирования опорной ПНП с некоторым циклическим сдвигом С, устраняющим рассогласование во времени принимаемой и опорной ПНП, значения ЦС c1 и с2 ПК-1 и ПК-2 определяют (блок 9) по полученным imax и jmax с использованием следующих соотношений:

Значения С, c1 и с2 связаны следующими установленными в ходе моделирования соотношениями:

где C(modL1) - операция взятия числа С по модулю числа L1.
Затем на этапе контроля синхронизма по задержке формируют опорный СРС, манипулированный ПНП с требуемым ЦС С (блок 10), измеряют степень его корреляции с принимаемым сигналом (блок 11), и в случае обнаружения по порогу RПОР главного пика ПВКФ принимают решение о захвате сигнала по задержке. В ином случае поиск продолжают с новым периодом принимаемого СРС.
Существенными отличительными признаками заявляемого способа является следующая совокупность действий:
использование в качестве манипулирующей ПСП искомого СРС производной нелинейной последовательности (ПНП), формируемой в соответствии с правилом (1) из кодов квадратичных вычетов;
использование в качестве опорных сигналов, манипулированных производящими линейками (ПЛ), составленными из кодов квадратичных вычетов;
осуществление параллельного накопления ПВКФ с периодичностью L1 и L2 тактов обработки с использованием значений корреляции двух разных сегментов принимаемого и опорных сигналов длин L1 и L2, структура которых (сегментов) динамично изменяется в реальном времени с каждым тактом поступления принимаемого сигнала и определяет перестройку корреляторов;
предварительное одновременное сокращение числа ячеек неопределенности по задержке принимаемого сигнала до L1 и L2 ячеек относительно первой и второй опорных производящих линеек;
на этапе контроля установления синхронизма по задержке реализуется формирование опорного сигнала без непосредственного определения текущей временной задержки принимаемого сигнала с использованием выражения (2) по сочетанию номеров тактов синхронизма с производящими линейками.
Схема устройства поиска СРС, манипулированных ПНП, реализующая метод ускоренного поиска, представлена на фиг.5.
Поиск по задержке реализуется двумя схожими по строению каналами поиска по первой и второй производящим компонентам (ПК-1 и ПК-2), в которых обнаружение такта синхронизма с соответствующей производящей линейкой осуществляется по максимуму накопленной ПВКФ.
Каналы поиска по ПК-1 и ПК-2 содержат: корреляторы 1, использующие в качестве динамически перестраиваемых согласованных фильтров акустоэлектронные конвольверы (АЭК) с временами интегрирования θ1 и θ2 (θ1=L1·τэ и θ2=L2·τэ, τэ - длительность элементарного символа ПСП); генераторы 4 опорных последовательностей производящих компонент; усилители 5; аналого-цифровые преобразователи 6 (АЦП); накопители ПВКФ, включающие цифровой параллельный сумматор 7 и оперативное запоминающее устройство (ОЗУ), состоящее из элементов памяти 8; схемы совпадения 9; схемы выбора такта синхронизма (СВТС), содержащие счетчик 10 тактовых импульсов (ТИ) с переполнением, ключ 11, цифровой компаратор 12 (ЦК), счетчик 13, регистр 14, вычислитель 15 сдвигов с1 и c2. Также схема содержит генератор 3 опорного производного сигнала и схему контроля 2.
Итогом работы каждого канала является определение значения c1 и с2 циклических сдвигов ПК, использование которых на этапе контроля синхронизма обеспечит формирование в генераторе 3 опорного производного сигнала с результирующим ЦС С, устраняющим рассогласование по задержке.
В каждом из каналов на АЭК 1 поступает принимаемый сигнал Sвх в виде повторяющихся инвертированных во времени СРС, манипулированных ПНП (СРС-ПНП), и опорный сигнал (ОС) Sопор, манипулированный соответствующей производящей линейкой. С каждым тактом с АЭК 1 снимается напряжение, пропорциональное энергии сверток сегментов длин L1 и L2 движущихся навстречу друг другу опорных линеек (Sопор), формируемых генераторами опорных линеек 4 первой и второй производящих компонент, и Sвх.
После усиления в усилителе 5 выходной сигнал АЭК подвергается преобразованию в аналого-цифровом преобразователе 6 с частотой дискретизации, равной частоте ПСП. Первое оцифрованное значение ПВКФ (для нулевых сдвигов i=0 и j=0 относительно начального взаимного сдвига l0) через параллельный сумматор 7 без изменений (так как к этому моменту с выхода ОЗУ на другие входы сумматора еще ничего не поступает) параллельно записывается в первые разряды (элементы памяти 8) сдвиговых регистров ОЗУ. Общее число регистров должно соответствовать числу разрядов максимально возможного накопленного значения ПВКФ. Количество разрядов N в регистрах равно числу сдвигов, для которых будет накапливаться ПВКФ, т.е. L1 и L2 в каналах 1 и 2 соответственно. С каждым тактом ячейки регистров ОЗУ параллельно заполняются новыми оцифрованным значением огибающей выходов АЭК. По прошествии L1 тактов в канале 1 (и L2 - в канале 2), ячейки 1...N ОЗУ каналов заполнены L1 и L2 значениями ПВКФ, полученной для всех сдвигов i и j (i=0,1...L1-1; j=0,1...L2-1). Co следующим тактом на входы сумматоров 7 поступают значения ПВКФ, полученные в АЦП 6 для сдвигов, расположенных на удалении L1 и L2 тактов относительно нулевых начальных сдвигов i=0 и j=0. Они суммируются со значениями ПВКФ для i=0 и j=0, поступающими по тактовому импульсу (ТИ) через схемы совпадения 9 на другие входы сумматора 7 с последних ячеек (N) регистров ОЗУ, после чего записываются в первые разряды регистров ОЗУ.
Таким образом, через число тактов анализа, для канала 1 равное l1=P·L-L1 и для канала 2 l2=P·L-L2 (где Р - заданное число периодов принимаемого сигнала, на которых производится накопление ПВКФ) в ОЗУ каналов поиска ПК-1 и ПК-2 окажутся записанными L1 и L2 значений Rε1i; ПВКФ, накопленной для L1 и L2 значений i и j взаимных сдвигов, следующих с периодичностью длин опорных ПК.
При достижении числом тактов анализа значений l1 и l2 в счетчиках 10 наступает переполнение, и за L1 и L2 тактов до окончания заданного времени анализа (общее число тактов анализа равно Р·L), открываются ключи 11, разрешающие прохождение следующей суммы ПВКФ с сумматора 7 в цифровой компаратор (ЦК) 12. Также по сигналу переполнения счетчиков 10 запускаются счетчики 13 количества последних L1 и L2 тактов сдвига, для которых в ЦК будет выбираться максимум накопленной ПВКФ. Поступающее в ЦК 12 первое значение ПВКФ сохраняется в нем в качестве порогового.
Со следующим тактом с сумматоров в ЦК поступят (i+1)-е и (j+1)-е значения накопленной ПВКФ. В случае их превышения над предыдущим (полученным для сдвига i=0 или j=0) с ЦК 12 на буферный регистр 14 поступит сигнал, разрешающий запись со счетчика 13 номера сдвига i (или j), для которого на данный момент накопленная в канале ПВКФ максимальна. С каждым тактом сравнения в ЦК 12 каналов поиска в качестве порога остается большее из двух текущих значение суммарной ПВКФ.
В результате выполнения операции сравнения за L1 и L2 последних такта анализа будут выделены и записаны в регистры 14 значения сдвигов imax и jmax, соответствующих максимумам накопленной в каналах ПВКФ.
По сигналу переполнения по значениям L1 и L2 счетчиков 13 запускаются вычислители 15 циклических сдвигов, использующие для расчета с1 и с2 значения imax и jmax. Вычислитель 15 реализует операции выражения (2).
Полученные значения с1 и с2 поступают в генераторы 4 опорных последовательностей производящих компонент, которые формируют ПК с циклическими сдвигами с1 и с2. Символы формируемых ПК поступают в генератор 3 опорного производного сигнала и обеспечивают получение опорного СРС-ПНП (Sопор) с результирующим сдвигом С, устраняющим рассогласование по задержке между принимаемым Sвх и опорным Sопор сигналами при проверке факта синхронизма в схеме контроля 2.
Существенными отличительными признаками заявляемого устройства является следующая совокупность признаков: использование для получения свертки принимаемого и опорного сигналов акустоэлектронного конвольвера (АЭК) в качестве динамически перестраиваемого согласованного фильтра, с выхода которого напряжение поступает на аналого-цифровой преобразователь, а затем оцифрованный сигнал поступает в параллельный сумматор, в который для реализации цифрового некогерентного накопления также поступает полученное ранее и хранимое в ОЗУ значение отклика АЭК для соответствующего такта взаимного сдвига, при этом по прошествии требуемого числа периодов накопления каждое из полученных суммарных значений поступает в схему выбора такта синхронизма (СВТС), где значение такта синхронизма по задержке с каждой из двух производящих линеек определяется путем потактового выбора максимального из всех суммарных значений ПВКФ и установление соответствующего ему номера такта сдвига, который затем поступает в вычислитель сдвига, а с него на генератор опорной последовательности производящей компоненты, формирующий опорный сигнал для передачи в АЭК на этапе поиска либо формирующий производящие компоненты для генератора опорной ПНП, который подает манипулированный ПНП опорный сигнал в схему контроля синхронизма.
На фиг.1 изображено правило формирования производных нелинейных последовательностей.
На фиг.2 изображена таблица значений периодической взаимокорреляционной функции (ПВКФ) ПНП различных типов с производящими линейками (ПЛ).
На фиг.3 изображены графики зависимости ПВКФ ПНИ типа К3К3 длины L=77 с производящей линейкой, составленной из ККВ L2=11 (а) и ПВКФ ПНП типа К3К1 длины L=221 с производящей линейкой, составленной из ККВ L2=17 (б).
На фиг.4 изображен алгоритм ускоренного поиска СРС, манипулированных ПНП.
На фиг.5 изображена схема устройства поиска СРС, манипулированных ПНП.
На фиг.6 изображен порядок корреляции сегментов принимаемого и опорного сигналов в АЭК на двух смежных тактах обработки.
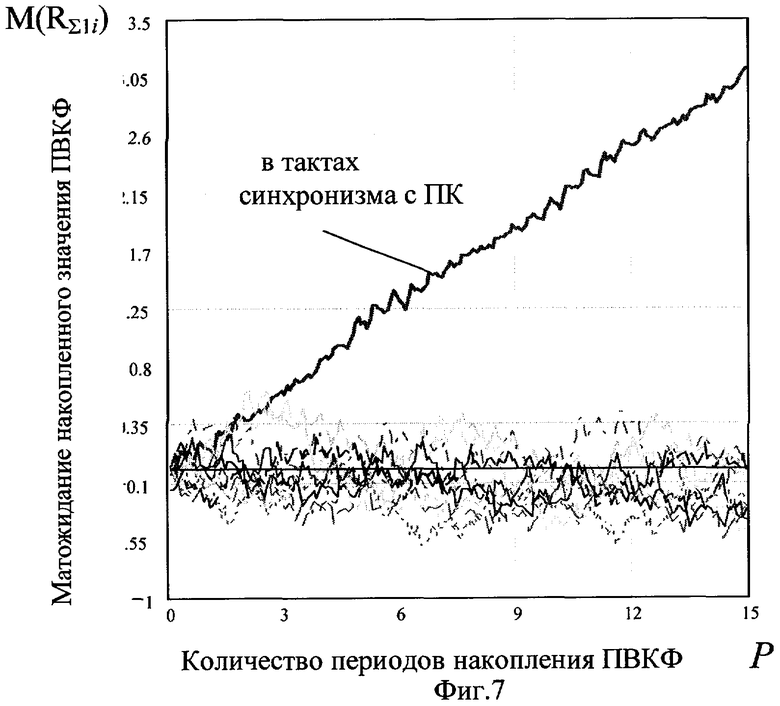
На фиг.7 изображена зависимость среднего выборочного накопленного значения ПВКФ от количества периодов накопления при 25 процентах искаженных символов принимаемого сигнала.
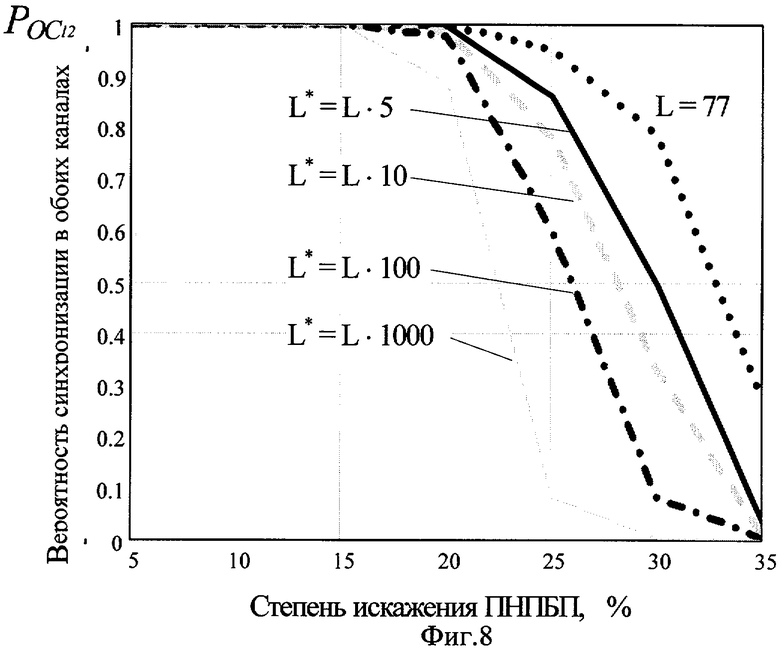
На фиг.8 изображены зависимости вероятности успешной синхронизации по задержке от степени искажения принимаемого сигнала (в процентах от общего числа символов ПСП) для ПНП длин L-77, 385, 770, 7700, 77000 при 32-х периодах накопления ПВКФ принимаемого и опорных сигналов.
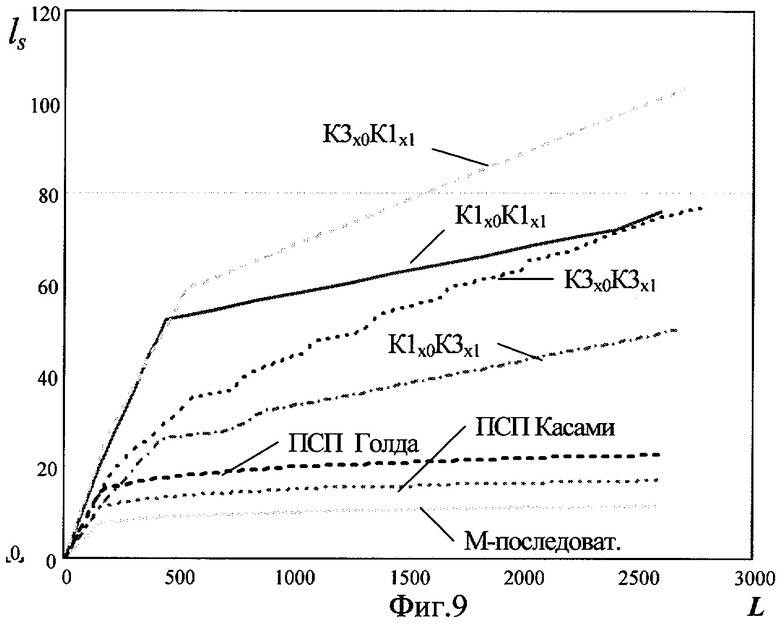
На фиг.9 изображены зависимости эквивалентной линейной сложности ls разных типов ПНП (К3К1, К3К3, К1К3, К1К1) и известных линейных ПСП (Голда, Касами, М-последовательности) от их длины.
Возможность реализации заявляемого способа поиска с использованием в качестве корреляторов акустоэлектронных конвольверов (АЭК) подтверждается результатами имитационного моделирования процесса накопления ПВКФ сегментов принимаемого СРС-ПНП с обновляющимися (с каждым тактом ПСП) сегментами опорной производящей линейки. Процесс взаимокорреляции в АЭК сегментов принимаемого и опорного сигналов на 2-х смежных тактах обработки поясняет фиг.6 (θ1 и θ2 - время интегрирования АЭК, τэ - длительность элементарного символа ПНП). Возможность достоверного выбора максимума накопленной ПВКФ ПНП с ПЛ, соответствующего синхронизму с данной ПК, подтверждается приведенными на фиг.7 зависимостями от числа периодов накопления Р нормированного среднего выборочного M(R∑1i) случайных значений накопленной ПВКФ ПНП L=143 (L1=11, L2=13) с ПК L1 для всевозможных значений i=0, 1...L1-1 их взаимных сдвигов в пределах периода ККВ. Ярко выраженный рост среднего выборочного M(R∑10) суммарной ПВКФ (фиг.7), накопленной на тактах сдвига, кратных L1, соответствует тактам синхронизма с первой производящей линейкой. Для других i независимо от количества периодов накопления значение M(R∑10) ПВКФ колеблется около нуля в некотором диапазоне значений. При этом средняя выборочная степень искажения принимаемой последовательности ПНП равна 25 процентам искаженных символов в ПСП, что подтверждает реализуемость способа в условиях помех.
Значения накопленной в каналах ПВКФ определяются выражениями:


где R(S[m], S1[q]) и R(S[m], S2[q]) - относительные значения ПВКФ между сегментами Sm длиной L1 и L2 принимаемого СРС-ПНП и сегментами S1q и S2q тех же длин опорных производящих линеек;
m и q - номера тактов начала сегмента относительно l0-го сдвига; R∑1i(l0) и R∑2j(l0) - суммарные значения ПВКФ (за Р периодов СРС-ПНП) для i-го и j-го тактов анализа при начале поиска со взаимного сдвига l0.
Вероятности Р∑1max и Р∑2max правильного выбора максимумов R∑1imax и R∑2jmax из L1 и L2 значений определяются для каждого канала накопления ПВКФ из выражений:


где f(R∑10) и f(R∑20) - плотности нормального распределения вероятностей накопленных в каналах 1 и 2 значений ПВКФ в тактах синхронизма с соответствующими производящими ККВ;
f(R∑1i) и f(R∑2j) - плотности нормального распределения вероятностей накопленных в каналах 1 и 2 значений ПВКФ в тактах сдвига, не соответствующих синхронному состоянию опорных ККВ с сегментами ПНП.
Общая вероятность  правильной синхронизации (т.е. правильного выбора максимумов накопленной ПВКФ в обоих каналах) определяется:
правильной синхронизации (т.е. правильного выбора максимумов накопленной ПВКФ в обоих каналах) определяется:

Возможность обеспечения быстрого поиска СРС с большой базой (для ПНП длин L=77, 385, 770, 7700, 77000) за малое число периодов накопления принимаемого сигнала (при 32-х периодах накопления ПВКФ) с высокой вероятностью синхронизации по задержке подтверждается полученными в результате имитационного моделирования и изображенными на фиг.8 зависимостями вероятности успешной синхронизации от степени искажения принимаемого сигнала (в процентах от общего числа символов ПСП). Сравнение (при равных базах СРС) значения достигаемого относительного времени поиска, выраженного в числе периодов анализа СРС, с аналогичным показателем для известных способов, свидетельствует о преимуществе заявляемого способа во времени поиска СРС по задержке примерно в 2-3 раза перед конвольверным поиском [2] с применением известных ПСП, в 10 и более раз перед многоэтапным поиском [2] и в 100 раз и более перед последовательным циклическим поиском [2].
Реализация высокой имитостойкости используемых сигналов подтверждается приведенными на фиг.9 зависимостями эквивалентной линейной сложности разных типов ПНП (К3К1, К3К3, К1К3, К1К1) и известных линейных ПСП (Голда, Касами, М-последовательности) от их длины. Преимущество в эквивалентной линейной сложности составляет примерно от 5-ти раз и более для длин ПСП L≈2·103 и возрастает с ростом длины ПСП.
Построение заявляемого устройства, реализующего способ поиска сигнала, возможно в рамках сигнального процессора на современной быстродействующей элементной базе с высокой степенью интеграции. При высоких тактовых частотах ПСП fПСП, превышающих возможности АЦП по быстродействию, функции преобразования возможно распределить между несколькими (m) АЦП, чтобы каждый из них обеспечивал преобразование с частотой дискретизации fПСП/m. Цифровой компаратор может быть реализован с использованием микросхем типа полных сумматоров. Выполненное на основе регистров сдвига ОЗУ обладает достаточным быстродействием и не требует специальных распределительных и коммутационных устройств.
Заявляемое устройство поиска СРС, манипулированных ПНП, может использоваться как самостоятельно, так и для сокращения времени поиска при дополнении традиционных устройств, использующих для обнаружения факта синхронизма по задержке уровень корреляции по всей длине опорного и принимаемого сигналов и реализующих известные циклические, многоэтапные или иные методы поиска. Применимость данного способа и устройства поиска прежде всего связана с использованием СРС, манипулированных ПНП на основе кодов квадратичных вычетов. При этом обеспечивается высокая скрытность этапа синхронизации по задержке, а также возможность оперативной адаптации радиолинии к информационной и помеховой обстановке за счет изменения с малой дискретностью значения длины манипулирующей ПСП.
Источники информации:
1. Варакин Л.Е. Системы связи с шумоподобными сигналами [Текст] -М.: Радио и связь, 1985. - 384 с.
2. Журавлев В.И. Поиск и синхронизация в широкополосных системах. [Текст] / В.И. Журавлев - М.: Радио и связь, 1986. - 240 с.
3. Сныткин И.И. Синхронизация по задержке при цифровой обработке сверхдлинных рекуррентных последовательностей [Текст] / Сныткин И.И., Бурым В.И., Серобабин А.Т. / Известия высших учебных заведений. Радиоэлектроника, № 7, 1990 - стр.31-35.
4. Авторское свидетельство СССР № 1003372, кл. Н04L 7/02, 1983 г.(авторы А.С.Воробьев, А.В.Кузичкин, В.М.Куркин, Б.И.Просенков, В.В.Артюшин, В.М.Тарасов).
5. Сныткин И.И. Теория и практическое применение сложных сигналов нелинейной структуры. Часть 3. [Текст] / И.И.Сныткин. - МО: 1989 - 148 с.
6. Долгов В.И. Применение акустоэлектронных конвольверов для обработки сигналов в технике связи [Текст] / В.И. Долгов и др. // Зарубежная радиоэлектроника - 1990. - № 8 - с.58-66.
7. Свердлик М.Б. Оптимальные дискретные сигналы [Текст] / М.Б. Свердлик - М.: Сов. радио, 1975. - 200 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство третьей решающей схемы ускоренного поиска и эффективного приема широкополосных сигналов | 2023 |
|
RU2808721C1 |
| СПОСОБ УСКОРЕННОГО ПОИСКА ШИРОКОПОЛОСНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2514133C2 |
| Устройство третьей решающей схемы ускоренного поиска и эффективного приема широкополосных сигналов | 2019 |
|
RU2718753C1 |
| Способ третьей решающей схемы ускоренного поиска и эффективного приема широкополосных сигналов | 2023 |
|
RU2821352C1 |
| Способ третьей решающей схемы ускоренного поиска и эффективного приема широкополосных сигналов | 2020 |
|
RU2782676C2 |
| Устройство третьей решающей схемы ускоренного поиска и эффективного приема широкополосных сигналов | 2020 |
|
RU2766859C1 |
| Способ третьей решающей схемы ускоренного поиска и эффективного приема широкополосных сигналов | 2019 |
|
RU2730389C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОДОВЫХ СЛОВАРЕЙ НЕЛИНЕЙНЫХ РЕКУРРЕНТНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2009 |
|
RU2439657C2 |
| СПОСОБ ТРАНСЛЯЦИОННОГО УСЛОЖНЕНИЯ НЕЛИНЕЙНЫХ РЕКУРРЕНТНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ В ВИДЕ КОДОВ КВАДРАТИЧНЫХ ВЫЧЕТОВ, СУЩЕСТВУЮЩИХ В ПРОСТЫХ ПОЛЯХ ГАЛУА GF(p), И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2669506C1 |
| СПОСОБ РАСКРЫТИЯ СТРУКТУРЫ НЕЛИНЕЙНЫХ РЕКУРРЕНТНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ В ВИДЕ КОДОВ КВАДРАТИЧНЫХ ВЫЧЕТОВ, СУЩЕСТВУЮЩИХ В ПРОСТЫХ ПОЛЯХ ГАЛУА GF(p), И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2661542C1 |
Изобретение относится к методам и устройствам обработки данных в широкополосной радиосвязи и радионавигации, где этапу приема информационных сигналов с расширенным спектром, манипулированных псевдослучайной последовательностью, обязательно предшествует этап синхронизации. Способ поиска реализуется применительно к сигналам, манипулированным имитостойкими производными нелинейными последовательностями, и включает параллельное накопление с выхода динамически перестраиваемых согласованных фильтров значений периодической взаимокорреляционной функции сегментов принимаемого сигнала с двумя опорными производящими линейками, из которых сформирована производная последовательность, а также определение номеров тактов их взаимного сдвига, соответствующих синхронизму по задержке. Далее по сочетанию номеров этих тактов определяется текущая задержка всего принимаемого сигнала. Причем в каналах поиска в качестве динамически перестраиваемых согласованных фильтров используются акустоэлектронные конвольверы. Технический результат - сокращение временных и аппаратных затрат на поиск широкополосных сигналов по задержке в сочетании с обеспечением их высокой имитостойкости. 2 н.п. ф-лы, 9 ил.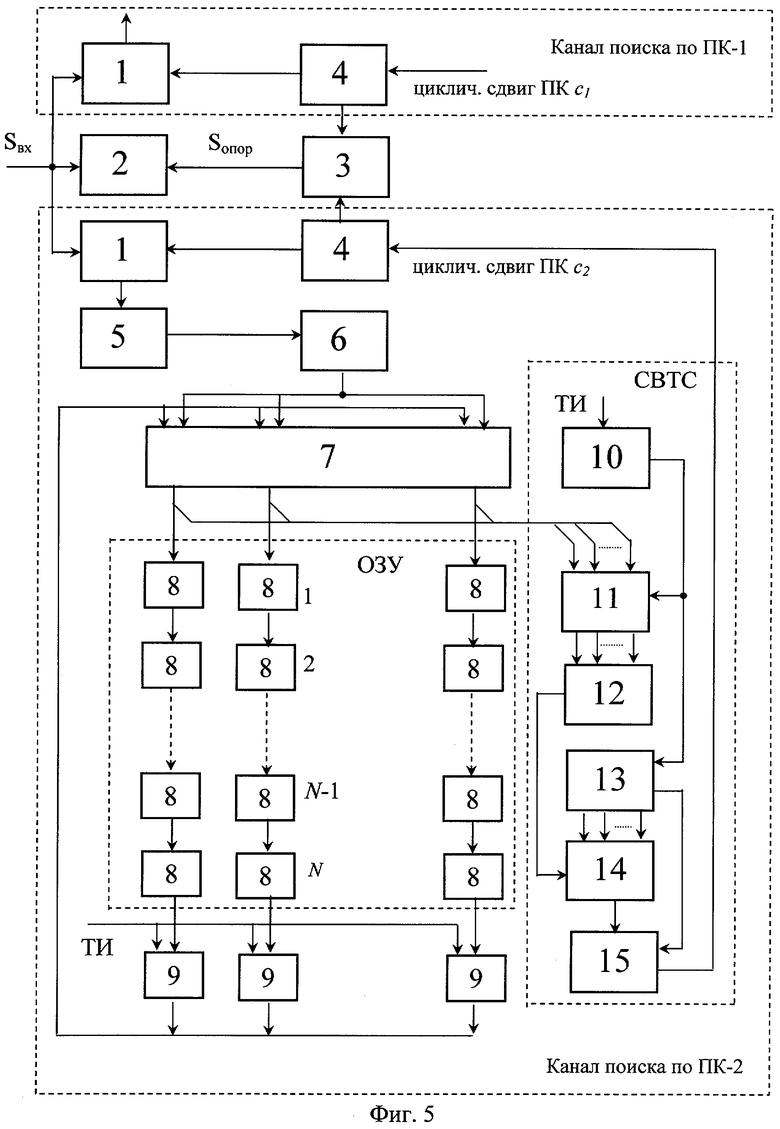

затем посредством параллельного формирования двух последовательностей повторяющихся производящих компонент длин L1 и L2, генерируемых с циклическими сдвигами c1 и c2 соответственно, а также посимвольного суммирования по модулю два этих последовательностей формируют опорную производную последовательность длиной L=L1·L2, получаемый циклический сдвиг С которой на этапе контроля устраняет рассогласование во времени принимаемого и опорного производных сигналов, а его значение С обусловлено значениями c1 и c2 в соответствии с выражениями c1=L1-С (mod L1), c2=L-C(mod L2), где C(mod L1) - операция взятия числа С по модулю числа L1, при этом решение о захвате сигнала по задержке принимают по факту превышения установленного порога значением взаимокорреляционной функции принимаемого и полученного опорного производного сигнала, иначе поиск продолжают.
| Устройство для синхронизации шумоподобных сигналов | 1981 |
|
SU1003372A2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Фунгицидная композиция | 1978 |
|
SU793357A3 |
| US 6453284 А, 17.09.2002 | |||
| Адаптивное устройство поиска широкополосного сигнала | 1986 |
|
SU1453601A2 |

