Предпосылки изобретения
Настоящее изобретение относится к дисковому носителю записи, такому как оптический диск, способу изготовления дисков, предназначенному для производства дисковых носителей записи, устройству привода диска, предназначенному для привода дискового носителя записи, и способу воспроизведения, предназначенному для воспроизведения данных с дискового носителя записи. В частности, настоящее изобретение относится к диску, каждая из дорожек которого модулирована в виде предварительно записанной канавки.
В качестве техники записи и воспроизведения цифровых данных была разработана техника записи данных с использованием носителя записи на оптических дисках, включая магнитооптические диски. Оптический диск может быть выполнен в виде CD (компакт-диск), MD (минидиск) или DVD (универсальный цифровой диск). Термин оптический диск представляет собой обобщенное название дискообразной металлической тонкой пластины, служащей в качестве носителя записи, с которой данные считываются в виде изменений, полученных при отражении лазерного луча, которым облучают носитель записи.
Более конкретно, оптический диск может представлять собой диск, предназначенный только для чтения, или может быть перезаписываемым диском, на который можно записывать данные пользователя. Оптические диски, предназначенные только для воспроизведения, включают CD, CD-ROM и DVD-ROM, с другой стороны, оптические диски с возможностью перезаписи включают диски типа MD, CD-R, CD-RW, DVD-R, DVD-RW, DVD+RW и DVD-RAM. Данные записывают на диск с возможностью перезаписи с использованием, в частности, способа магнитооптической записи, способа записи с изменением фазы и способа записи с изменением пленки пигмента. Способ записи на основе изменения пленки пигмента также называется способом однократной записи, с помощью которой данные могут быть записаны на оптический диск только один раз, и после того, как данные были записаны на диск, на этот же диск больше не могут быть записаны другие данные. Таким образом, способ записи с изменением пленки пигмента пригоден для записи с целью сохранения данных. С другой стороны, способ магнитооптической записи и способ записи с изменением фазы пригоден для множества различных вариантов применения, включая запись данных различного вида и содержания, таких как музыкальные данные, видео-данные, игры и программные приложения.
Для записи данных на диск с использованием способа магнитооптической записи, способа записи с изменением фазы и способа записи и с изменением пленки пигмента необходимо использовать направляющее средство, предназначенное для отслеживания дорожки записи данных. С этой целью на диске заранее формируются канавки, которые называются предварительно размеченными канавками. Канавки и ровные площадки используются в качестве дорожек для записи данных. Площадка - это плоский элемент, расположенный между двумя соседними канавками.
Кроме того, на диск должна быть записана информация адреса так, чтобы можно было записывать данные в любом заранее заданном положении на дорожке данных. Однако в некоторых случаях информацию адреса записывают путем вобулирования канавок.
Предположим, что на диске заранее была сформирована дорожка для записи данных в виде предварительно размеченной канавки. При этом боковые стенки предварительно размеченной канавки формируют извилистыми настолько, чтобы вобулирование этих стенок представляло информацию адреса.
Благодаря таким предварительно размеченным канавкам, можно считывать адрес по информации вобулирования, записанной во время операций записи и воспроизведения, и эта информация передается через отраженный луч. Таким образом, данные могут быть записаны в требуемое положение на или воспроизводиться с него без предварительной записи информации, например, в виде питов, представляющей адрес.
Благодаря использованию записи информации адреса в виде вобулирования формы канавки, отпадет необходимость выделять, например, отдельные области адреса на дорожке и записывать адреса в областях адреса, как обычно, в виде данных, записанных в форме питов. Таким образом, часть областей адреса может использоваться для записи полезной информации, за счет этого может быть увеличена емкость записи данных.
Следует отметить, что информация абсолютного времени и информация адреса, каждая из которых записана в виде вобуляции канавки, обозначается здесь как ATIP (абсолютное время в предварительно размеченных канавках) и ADIP (адрес в предварительно размеченных канавках), соответственно.
Таким образом, в случае диска с возможностью перезаписи, может возникнуть ситуация, когда для производителя желательно, чтобы на поставляемых дисках содержалась предварительно записанная информация различного вида, относящаяся к времени поставки. Информация времени поставки представляет собой информацию, предварительно записываемую на диск перед поставкой этого диска.
Обычно информация времени поставки включает информацию о диске и системную информацию. Информация о диске обычно включает линейную скорость записи и рекомендуемую величину мощности лазерного луча. С другой стороны, системная информация представляет данные, исключающие возможность использования данного диска на устройстве хакера.
Информация времени поставки должна быть надежной, должна иметь достаточно большой размер, и должна быть исключена возможность ее фальсификации.
Если информация времени поставки не будет надежной, то есть, если информация времени поставки диска не будет, например, точной, может возникнуть проблема, связанная с невозможностью обеспечить правильные условия записи в устройстве пользователя.
В ходе выполнения операции записи данных содержания, данные могут быть закодированы для защиты авторских прав. Если ключ, используемый для кодирования, не будет точно получен по системной информации, закодированные данные нельзя будет декодировать так, чтобы содержание было невозможно использовать. Это также делает невозможным кодирование данных содержания во время их записи.
По описанной выше причине информация диска и системная информация, которые записаны в виде информации времени поставки, должны иметь более высокий уровень надежности, чем записанные и воспроизводимые данные пользователя.
Информация времени поставки должна иметь достаточно большой размер по следующим причинам.
Рассмотрим случай, когда в системе требуется произвести обновление главного ключа, из-за того, что произошла утечка ключа во время атаки хакера. В этом случае информация о типе системы (или продукта) или подобная информация может использоваться в качестве блока исключения работы на устройстве хакера. Таким образом, для обновления главного ключа требуется достаточно большой объем информации, используемой в качестве массы информации для ключа, предназначенной для идентификации главного ключа для каждого блока. По этой причине системная информация неизбежно должна иметь сравнительно большой размер.
Кроме того, если учитывать возможность наличия дефекта, такого как повреждения или загрязнение диска, важно обеспечить возможность считывания информации времени поставки с высокой степенью точности и надежности. По этой причине информацию диска и системную информацию записывают с повторением. То есть, одни и те же данные записывают множество раз. Естественно, что при этом количество информации времени поставки увеличивается.
Необходимо предотвратить возможность фальсификации информации, поскольку, если системная информация, используемая для исключения возможности работы на устройстве хакера, как описано выше, не будет защищена от фальсификации, использование системной информации утратит смысл. Функция системной информации не может быть выполнена до тех пор, пока не будет обеспечено эффективное предотвращение фальсификации системной информации.
Важно отметить, что информация времени поставки в виде заранее записанной информации должна удовлетворять вышеприведенным требованиям. Также требуется разработать способ записи, пригодный для записи информации времени поставки.
Следует отметить, что известен способ создания тисненных питов на диске, используемый в качестве способа предварительной записи информации времени поставки на диск.
Однако для выполнения операций записи данных с высокой плотностью на оптический диск и воспроизведения с него при использовании способа предварительной записи в виде тисненных питов возникает ряд проблем.
Для записи данных с высокой плотностью на оптический диск и при воспроизведении с него требуется использовать канавку с небольшой глубиной. В случае изготовления диска путем одновременного формирования канавок и тисненных питов с использованием матрицы чрезвычайно сложно сформировать такие канавки и тисненные питы так, чтобы глубина канавок отличалась от глубины тисненных питов. При этом невозможно решить проблему, состоящую в том, что глубина канавок и глубина тисненных питов становятся равными друг другу.
Проблема использования тисненных питов с небольшой глубиной состоит в том, что с помощью таких тисненных питов не может быть получен сигнал с высоким качеством.
Предположим, например, что данные в количестве 23 Гб (гигабайт) могут быть записаны и могут воспроизводиться с оптического диска диаметром 12 см и толщиной покрытия (подложки) 0,1 мм с помощью оптической системы, в которой используется лазерный диод, генерирующий лазерное излучение с длиной волны 405 нм, и линзы объектива с числовой апертурой 0,85, путем записи и воспроизведения меток с изменением фазы с шагом дорожек 0,32 мкм и линейной плотностью 0,12 мкм/бит.
В этом случае метки с изменением фазы записывают в спиральной канавке, размечаемой на диске, и затем воспроизводят с нее. Для подавления шумов носителя, образующихся из-за высокой плотности меток с изменением фазы, требуется формировать канавку глубиной приблизительно 20 нм, что составляет диапазон от λ/13 до λ/12, где λ - длина волны.
С другой стороны, для получения сигнала с высоким качеством с использованием тисненных питов требуется формировать канавку с глубиной в диапазоне от λ/8 до λ/4. Таким образом, невозможно найти хорошее решение проблемы обеспечения одинаковой глубины для канавки и для рельефных выемок.
В этой ситуации потребовалось разработать способ формирования заранее записанной информации времени поставки, который позволил бы заменить использование тисненных питов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на проблемы, описанные выше, для создания нового дискового носителя записи с использованием соответствующей техники предварительной записи, предназначенной для повышения емкости дискового носителя записи и для улучшения рабочих характеристик записи и воспроизведения дискового носителя записи, для разработки способа изготовления дисков, предназначенного для производства дисков, для построения устройства привода диска, предназначенного для привода дискового носителя записи, а также способа воспроизведения данных с дискового носителя записи.
Для достижения вышеописанной цели настоящее изобретение направлено на дисковый носитель записи, включающий:
область записи/воспроизведения, в которой могут быть записаны первые данные и из которой они могут воспроизводиться с использованием способа записи с возможностью перезаписи и в которой были ранее записаны вторые данные, причем эти вторые данные остаются записанными в этой области и могут воспроизводиться из нее с использованием способа вобуляции канавки; и
область, предназначенную только для воспроизведения, позволяющую воспроизводить третьи данные, записанные в ней, путем использования способа вобуляции канавки, в котором:
- первые данные записывают с использованием первого способа модуляции и содержат структуру первого блока коррекции ошибки;
- вторые данные записывают с использованием второго способа модуляции; и
- третьи данные записывают с использованием третьего способа модуляции и содержат структуру второго блока коррекции ошибки, основанную на тех же кодах коррекции, что и в структуре первого блока коррекции ошибки, основанную на тех же кодах коррекции, что и в структуре первого блока коррекции ошибки.
Первый блок коррекции ошибки включает структуру первого фрейма, структуру первого подблока, включающую первые коды коррекции ошибки, и структуру второго подблока, включающую вторые коды коррекции ошибки. С другой стороны, второй блок коррекции ошибки включает структуру второго фрейма, структуру третьего подблока, включающего первые коды коррекции ошибки, и структуру четвертого подблока, включающую вторые коды коррекции ошибки.
Кроме того, вторые данные и третьи данные записывают в виде вобуляции заранее сформированных канавок. Способ записи с возможностью перезаписи, используемый для записи первых данных, представляет собой способ записи на дорожку отметок с изменяющейся фазой в виде вобуляции канавки, описанных выше.
В качестве альтернативы вторые данные и третьи данные записывают в виде вобуляции дорожки, размеченной заранее, принимая во внимание, что способ записи с возможностью перезаписи, используемый для записи первых данных, представляет собой способ записи на дорожку магнитооптических меток в виде вобуляции канавки, описанных выше.
Кроме того, третьи данные, записанные в область, предназначенную только для воспроизведения, включают информацию адреса.
Кроме того, плотность записи третьих данных выбирают меньшей, чем плотность записи первых данных, и количество кодов коррекции ошибки в первом блоке коррекции ошибки устанавливают кратным числу m, а количество кодов коррекции во втором блоке коррекции ошибки устанавливают равным n/m от количества кодов коррекции в первом блоке коррекции ошибки так, чтобы подсчет участка данных во втором блоке коррекции ошибки составлял n/m раз от подсчета участков данных в первом блоке коррекции ошибки, где переменные n и m представляют положительные целые числа.
Кроме того, плотность записи третьих данных выбирают так, чтобы она была меньше, чем плотность записи первых данных, и количество первых кодов коррекции, составляющих первый подблок, устанавливают кратным m, а количество первых кодов коррекции, составляющих третий подблок, устанавливают равным n/m от количества кодов коррекции, составляющих первый подблок, так, чтобы подсчет участка данных в третьем подблоке также составлял n/m раз от подсчета участков данных в первом подблоке, где переменные n и m представляют положительные целые числа.
Кроме того, количество вторых кодов коррекции, составляющих второй подблок, устанавливают кратным р, а количество вторых кодов коррекции, составляющих четвертый подблок, устанавливают кратным q/p от количества кодов коррекции, составляющих второй подблок так, чтобы подсчет участков данных в четвертом подблоке также составлял величину q/p раз от подсчета участка данных во втором подблоке, где переменные р и q обозначают положительные целые числа.
В этих случаях целое число m представляет собой степень 2 и целое число n равно 1.
Кроме того, длины блоков первого блока коррекции ошибки и второго блока коррекции ошибки устанавливают равными такому значению, чтобы блок мог быть записан в круг дорожки на диске.
Кроме того, количество фреймов в первом блоке коррекции ошибки и количество фреймов во втором блоке коррекции ошибки устанавливают равным значению, по меньшей мере, приблизительно равному подсчету участков данных в кодах коррекции ошибки.
Кроме того, количество фреймов в первом блоке коррекции ошибки и количество фреймов во втором блоке коррекции ошибки также может быть установлено равным значению, по меньшей мере, приблизительно равному сумме количества слов в первом коде коррекции и количества слов во втором коде коррекции.
Кроме того, второй фрейм включает сигнал синхронизации в части данных, соответствующей третьему подблоку. Второй фрейм также включает номер блока адреса в части данных, соответствующей четвертому подблоку.
Кроме того, к первому блоку коррекции ошибки, а также ко второму блоку коррекции ошибки добавлен соединительный фрейм.
В качестве альтернативы соединительный фрейм добавляют к первому блоку коррекции ошибки, а ко второму блоку коррекции ошибки соединительный фрейм не добавляют.
Первый способ модуляции, описанный выше, называется техникой RLL (1, 7) РР (кодирование с ограничением длины поля записи), второй способ модуляции представляет собой технику модуляции MSK (манипуляция с минимальным сдвигом), и третий способ модуляции представляет собой технику двухфазной модуляции.
Кроме того, в качестве первой техники модуляции может использоваться такая же техника модуляции, как и третья. В этом случае первый и третий способы модуляции представляют собой технику RLL (1, 7) РР, в то время, как второй способ модуляции представляет собой технику модуляции MSK.
Настоящее изобретение также направлено на устройство привода диска, предназначенное для записи данных и воспроизведения данных с дискового носителя записи, включающего:
область записи/воспроизведения, в которой могут быть записаны первые данные и из которой они могут воспроизводиться с использованием способа, позволяющего производить повторную запись или однократную запись, и в которой остаются записанными вторые данные, и могут воспроизводиться из нее с использованием способа вобуляции канавки; и
область, предназначенную только для воспроизведения, позволяющую воспроизводить третьи данные, записанные в ней, путем использования вобуляции канавки, в котором:
первые данные записывают с использованием первого способа модуляции и содержат структуру первого блока коррекции ошибки;
вторые данные записывают с использованием второго способа модуляции; и
третьи данные записывают с использованием третьего способа модуляции и содержат структуру второго блока коррекции ошибки, основанную на тех же кодах коррекции, что и в структуре первого блока коррекции ошибки.
Кроме того, устройство привода диска содержит:
головку, предназначенную для излучения луча лазера на дорожку, сформированную в виде канавки, и для приема сигнала отраженного луча;
средство выделения вобуляции, предназначенное для выделения сигнала, представляющего форму вобуляции дорожки, из сигнала отраженного луча;
средство выделения сигнала первых данных, предназначенное для выделения сигнала, представляющего первые данные, из сигнала отраженного луча;
средство демодуляции вторых данных, предназначенное для демодуляции сигнала, представляющего форму вобуляции дорожки, при воспроизведении из области записи/воспроизведения с использованием второго способа модуляции;
средство демодуляции первых данных, предназначенное для демодуляции сигнала, представляющего первые данные при воспроизведении из области записи/воспроизведения с использованием первого способа модуляции;
средство демодуляции третьих данных, предназначенное для демодуляции при воспроизведении из области, предназначенной только для воспроизведения, при этом сигнал представляет форму вобуляции дорожки, сформированной с помощью третьего способа модуляции;
средство коррекции ошибки, предназначенное для выполнения обработки коррекции ошибки на основе кодов коррекции ошибки по результату модуляции, полученному на выходе средства демодуляции первых данных, и по результату модуляции, полученному на выходе средства демодуляции третьих данных; и
средство управления, предназначенное для управления средством демодуляции вторых данных, для выполнения обработки демодуляции в ходе записи/воспроизведения в области записи/воспроизведения, запроса средства коррекции ошибки для выполнения обработки коррекции ошибки на основе первого блока коррекции ошибки в ходе записи/воспроизведения, в области записи/ воспроизведения, управления средством демодуляции третьих данных для выполнения обработки демодуляции в ходе воспроизведения из области, предназначенной только для воспроизведения, запроса средства коррекции ошибки для выполнения обработки коррекции ошибки на основе второго блока коррекции ошибки в ходе воспроизведения из области, предназначенной только для воспроизведения.
Кроме того, средство коррекции ошибки позволяет осуществлять кодирование и декодирование первого блока коррекции ошибки, включая структуру первого фрейма, структуру первого подблока, состоящего из первых кодов коррекции, и структуру второго подблока, состоящего из вторых кодов коррекции, и позволяет осуществлять декодирование второго блока коррекции ошибки, включая структуру второго фрейма, структуру третьего подблока, состоящего из первых кодов коррекции, и структуру четвертого подблока, состоящего из вторых кодов коррекции.
Кроме того, средство управления осуществляет управление головкой для обеспечения доступа к области записи/воспроизведения в месте положения, задаваемом информацией адреса, выделяемой в виде вторых данных, и осуществляет управление головкой для обеспечения доступа к области, предназначенной только для воспроизведения, в месте, задаваемом информацией адреса, включенной в третьи данные.
Кроме того, средство коррекции ошибки осуществляет обработку коррекции ошибки путем установки количества кодов коррекции, составляющих первый блок коррекции ошибки, равного величине, кратной m, и количества кодов коррекции, составляющих второй блок коррекции ошибки, равного величине, кратной n/m, от количества кодов коррекции, составляющих первый блок коррекции ошибки, где переменные n и m обозначают положительные целые числа.
Кроме того, средство коррекции ошибки осуществляет обработку коррекции ошибки путем установки количества первых кодов коррекции, составляющих первый блок коррекции ошибки, равного величине, кратной m, причем количество первых кодов коррекции, составляющих третий блок коррекции ошибки, составляет величину, кратную n/m, от количества кодов коррекции, составляющих первый блок коррекции ошибки, где величинами n и m обозначены положительные целые числа, причем количество вторых кодов коррекции, составляющих второй блок коррекции ошибки, устанавливают кратным р, и количество вторых кодов коррекции, составляющих четвертый блок коррекции ошибки, устанавливают кратным q/p от количества кодов коррекции, составляющих второй блок коррекции ошибки, где величины р и q обозначают положительные целые числа.
В этих случаях целое число m представляет собой степень 2, и целое число n равно 1.
Кроме того, обработка демодуляции осуществляется на основании предположения, что первый способ модуляции, описанный выше, представляет собой технику RLL (1, 7) РР, второй способ модуляции представляет собой технику модуляции MSK, и третий способ модуляции представляет собой технику двухфазной модуляции.
В качестве альтернативы требуемая обработка демодуляции осуществляется так, что первую технику модуляции принимают совпадающей с третьей техникой модуляции.
В еще одном альтернативном варианте обработка демодуляции осуществляется таким образом, что в качестве первого и третьего способа модуляции принимают модуляцию RLL (1, 7) РР, в то время как второй способ модуляции представляет собой технику модуляции MSK.
Настоящее изобретение также направлено на способ воспроизведения, предназначенный для воспроизведения данных с дискового носителя записи, включающего:
область записи/воспроизведения, в которой могут быть записаны первые данные и из которой они могут воспроизводиться с использованием техники, позволяющей производить повторную запись или однократную запись, и в которой остаются записанными вторые данные, и могут воспроизводиться с нее с использованием способа вобуляции канавки; и
область, предназначенную только для воспроизведения, в которой обеспечивается возможность записи с использованием способа вобуляции канавки третьих данных, предназначенных для воспроизведения, в которой:
первые данные записывают с использованием первого способа модуляции и содержат структуру первого блока коррекции ошибки;
вторые данные записывают с использованием второго способа модуляции; и
третьи данные записывают с использованием третьего способа модуляции и содержат структуру второго блока коррекции ошибки, основанную на тех же кодах коррекции, что и в структуре первого блока коррекции ошибки.
Кроме того, для выполнения операции воспроизведения, осуществляемой из области записи/воспроизведения, способ воспроизведения дополнительно содержит следующие этапы:
излучение луча лазера на дорожку, размеченную в виде канавки, и прием сигнала отраженного луча;
выделение сигнала, представляющего форму вобуляции дорожки, и сигнала, представляющего первые данные, из сигнала отраженного луча;
демодуляция выделенного сигнала, представляющего форму вобуляции дорожки, с использованием второго способа модуляции и выполнение процесса декодирования для получения информации адреса;
демодуляция выделенного сигнала, представляющего первые данные, на основании принятия того, что способ модуляции соответствует первому способу модуляции, используемому для модуляции сигнала, представляющего первые данные; и
выполнение обработки коррекции ошибки на основе кодов коррекции ошибки первого блока коррекции ошибки для воспроизведения первых данных.
Кроме того, для осуществления воспроизведения из области, предназначенной только для воспроизведения, способ воспроизведения дополнительно содержит следующие этапы:
излучение луча лазера на дорожку, сформированную в виде канавки, и прием сигнала отраженного луча;
выделение сигнала, представляющего форму вобуляции дорожки, из сигнала отраженного луча;
демодуляция выделенного сигнала, представляющего форму вобуляции дорожки, с использованием третьего способа модуляции; и
выполнение обработки коррекции ошибки на основе кодов коррекции ошибки второго блока коррекции ошибки для воспроизведения третьих данных.
Кроме того, для осуществления воспроизведения из области записи/воспроизведения способ воспроизведения дополнительно содержит этап осуществления обработки коррекции ошибки на основе первого блока коррекции ошибки, включающего структуру первого фрейма, структуру первого подблока, состоящего из первых кодов коррекции, и структуру второго подблока, состоящего из вторых кодов коррекции, в то время как для осуществления операции воспроизведения из области, предназначенной только для воспроизведения, способ воспроизведения дополнительно содержит этап осуществления обработки коррекции ошибки на основе второго блока коррекции ошибки, включающего структуру второго фрейма, структуру третьего подблока, состоящего из первых кодов коррекции, и структуру четвертого подблока, состоящего из вторых кодов коррекции.
Кроме того, для осуществления операции воспроизведения из области записи/воспроизведения, способ воспроизведения дополнительно содержит этап осуществления доступа к области записи/воспроизведения в месте положения, задаваемом информацией адреса, выделенной в виде вторых данных, и для осуществления операции воспроизведения из области, предназначенной только для воспроизведения, способ воспроизведения дополнительно содержит этап обеспечения доступа к области, предназначенной только для воспроизведения, в месте положения, задаваемом информацией адреса, включенной в третьи данные.
Кроме того, при проведении обработки коррекции ошибки, количество кодов коррекции, составляющих первый блок коррекции ошибки, устанавливают кратным m, и количество кодов коррекции, составляющих второй набор блока коррекции ошибки, устанавливают кратным n/m от количества кодов коррекции, составляющих первый блок коррекции ошибки, где переменные n и m обозначают положительные целые числа.
Кроме того, при обработке коррекции ошибки количество первых кодов коррекции, составляющих первый блок коррекции ошибки, устанавливают кратным m, количество первых кодов коррекции, составляющих третий блок коррекции ошибки, устанавливают кратным n/m от количества кодов коррекции, составляющих первый блок коррекции ошибки, где величины n и m обозначают положительные целые числа, при этом количество вторых кодов коррекции, составляющих второй блок коррекции ошибки, устанавливают кратным р, и количество вторых кодов коррекции, составляющих четвертый блок коррекции ошибки, устанавливают кратным q/p от количества кодов коррекции, составляющих второй блок коррекции ошибки, где переменные р и q обозначают положительные целые числа.
В этих случаях целое число m представляет собой степень 2 и целое число n равно 1.
Кроме того, обработка демодуляции осуществляется на основе принятия в качестве первого способа модуляции, описанной выше, техники RLL (1, 7) РР, при этом второй способ модуляции представляет собой технику модуляции MSK и третий способ модуляции представляет собой технику двухфазной модуляции.
В качестве альтернативы требуемая обработка демодуляции осуществляется на основе принятия того, что первая техника модуляции совпадает с третьей техникой модуляции.
В другом альтернативном варианте обработка демодуляции осуществляется на основании принятия положения, что первая и третья техники модуляции представляют собой технику RLL (1, 7) РР, в то время как вторая техника модуляции представляет собой технику модуляции MSK.
В соответствии с настоящим изобретением, на диске, представляющем устройство накопления информации с возможностью однократной записи, или на диске с возможностью перезаписи, информацию времени поставки (предварительно записанная информация) записывают в виде третьих данных способом вобуляции канавки. При обработке для записи предварительно записываемых данных плотность записи (и технику записи так же, как и технику модуляции) выбирают с меньшей плотностью. Кроме того, коды коррекции ошибки используют с применением той же техники, что и для данных, предназначенных для однократной записи, или данных, для которых возможна перезапись, которые обрабатывает так же, как и первые данные. Количество данных на блок коррекции ошибки при этом также уменьшают, например, до величины 1/m.
В качестве техники для записи первых данных (или данных пользователя) в область записи/воспроизведения используется техника записи с изменением фазы или техника магнитооптической записи.
С точки зрения экономии трудозатрат и стоимости на формирование информации времени поставки на диске, предпочтительно использовать технологию обработки, которая применяется для записи данных, предназначенных только для воспроизведения, которые формируются способом штамповки, поскольку в этом случае отсутствует необходимость записывать информацию времени поставки в виде третьих данных.
Кроме того, запись информации предварительно записанного адреса (ADIP) производят в виде вторых данных с использованием вобуляции канавки без формирования выемок. Таким образом, в записи диска, предназначенного для однократной записи/перезаписи, также предпочтительно не использовать выемки для записи информации времени поставки, а осуществлять процесс записи с помощью вобуляции канавки.
Информация времени поставки, записанная как третьи данные, содержит необходимое свойство, отличающее ее от информации предварительно записанного адреса, используемой в качестве вторых данных.
Таким образом, плотность записи информации предварительно записанного адреса, записываемого как вторые данные, может быть низкой, что позволяет обеспечить низкое значение частоты появления ошибки при использовании интерполяционной защиты или подобной методики. Кроме того, если вторые данные записаны в области записи/воспроизведения в виде вобуляции канавки, первые данные могут быть наложены на такую дорожку, выполненную в виде канавки.
С другой стороны, информация времени поставки может быть записана как третьи данные с более низкой плотностью записи, чем используется для первых данных. Если, однако, требуется учитывать время считывания, невозможно обеспечить плотность записи приблизительно на таком же уровне, как и в случае вторых данных (то есть для информации предварительно записанного адреса). Кроме того, предпочтительно обеспечить уровень частоты появления ошибки, не превышающий его значение для первых данных. Кроме того, поскольку область, предназначенная только для воспроизведения, используемая для записи информации времени поставки, представляет собой область, сформированную с помощью матрицы, то есть, область, содержащую данные, записанные в форме вобуляции канавки, информация адреса может быть включена в информацию времени поставки так, что при этом не требуется использовать наложение информации предварительного адреса.
При этом становится возможным использовать технику модуляции для третьих данных (то есть, для информации времени поставки), отличающуюся от используемой для вторых данных (или ADIP).
Рассмотрим случай, в котором третьи данные записывают с помощью вобуляции канавки. В процессе записи, осуществляемом путем вобуляции канавки, амплитуду вобуляции обычно выбирают небольшой, и отношение с/ш (S/N) (сигнал-шум) сигнала будет недостаточно высоким.
По этой причине для того, чтобы обеспечить надежность третьих данных (или информации времени поставки), важно снизить плотность записи до гораздо меньшей величины, чем используется для первых данных.
Кроме того, первые данные включают относительно большой блок коррекции ошибки (или, строго говоря, относительно большой первый блок коррекции ошибки), включающий большое количество кодов коррекции ошибки для обеспечения возможности коррекции ошибки и избыточности, и с выполнением глубокого процесса чередования. При этом, однако, учитывая влияние пыли и повреждений на диске, длину первого блока коррекции ошибки устанавливают как можно большей по величине, при условии, что это значение будет находиться в таком диапазоне, чтобы блок мог быть записан без выхода за пределы круга дорожки.
Кроме того, для уменьшения плотности записи третьих данных, третьи данные рассматриваются так же, как и первые данные. То есть, устанавливают такую длину второго блока коррекции ошибки для третьих данных, чтобы блок мог быть записан без выхода за пределы круга дорожки.
Кроме того, для уменьшения плотности записи третьих данных, устанавливают длину первого блока коррекции ошибки для первых данных, отличающуюся от длины второго блока коррекции ошибки для третьих данных.
Кроме того, коды коррекции ошибки третьих данных выполнены так же, как и множество кодов коррекции ошибки первых данных, количество которых выбирают большим для обеспечения возможности коррекции ошибки и избыточности кода.
Поскольку нежелательно использовать такое же количество кодов коррекции ошибки, что и количество участков данных в фрейме, связанных с кодами коррекции ошибки, значение подсчета участков данных в фрейме задают приблизительно таким же или меньшим, как и количество чередований, то есть, количество кодов.
Таким образом, поскольку размер первого блока коррекции ошибки отличается от размера второго блока коррекции ошибки, структура фрейма изменяется.
В случае первых данных первый блок коррекции ошибки включает m кодов коррекции ошибки. Когда размер блоков коррекции ошибки, принятый для первых данных, изменяется для третьих данных в соответствии с уменьшением плотности записи третьих данных, второй блок коррекции ошибки для третьих данных строят с использованием n/m кодов коррекции ошибки.
В этом случае, по существу, предпочтительно установить значение подсчета участков данных первого блока коррекции ошибки кратным числу, равному степени 2, например, такому как значение, кратное 2048 байт.
Кроме того, по существу, также предпочтительно установить значение подсчета участков данных второго блока коррекции ошибки для третьих данных кратным числу, равному степени 2, например, такому как значение, кратное 2048 байт.
Если добавляют EDC (код обнаружения ошибки) или подобный код, в некоторых случаях эффективное значение подсчета участков данных может быть установлено равным величине, отличающейся от степени 2. Для того чтобы как эффективный подсчет участков данных для первого блока коррекции ошибки, так и эффективный подсчет участков данных для второго блока коррекции ошибки были кратны степени 2, необходимо величину m также установить равной степени 2.
Более того, когда эффективные значения подсчета участков данных для первого блока коррекции ошибки и эффективного подсчета участков данных для второго блока коррекции ошибки будут равны степени 2, то есть, n=1, можно упростить доступ к данным.
Если структура фрейма третьих данных (то есть, информации времени поставки) будет отличаться от структуры фрейма первых данных (то есть, данных пользователя), способ ввода сигнала синхронизации, сигнала управления DC (так называемого dcc) и других вспомогательных сигналов, также изменится.
В случае третьих данных нет необходимости учитывать наложение вторых данных (то есть, информации предварительного адреса), которое используется с первыми данными. Кроме того, не требуется использовать такую же высокую плотность записи, как и для первых данных. По этим причинам может использоваться простой способ модуляции такой, как техника модуляции, применяемая для третьих данных.
Если, с другой стороны, описанные выше условия отсутствуют, в качестве способа модуляции третьих данных может использоваться такая же модуляция, как модуляция, используемая для первых данных.
Поскольку третьи данные, записанные в форме вобуляции канавки, формируют заранее с использованием матрицы, информация адреса также может быть записана одновременно с ними, что позволяет устройству привода диска осуществлять доступ к данным с использованием такой информации адреса.
В этом случае структура синхронизации и идентификатор синхронизации располагают в части фрейма третьих данных, в то время как номер блока адреса записывают в определенной части фрейма.
Поскольку информация предварительно записанного адреса заранее записана в области записи/воспроизведения в виде вторых данных, доступ фактически может осуществляться, даже если присутствует только минимальная структура синхронизации. При этом, однако, даже если структура синхронизации, идентификатор синхронизации и номер блока адреса будут присутствовать, не возникает никаких проблем.
Кроме того, поскольку первые данные представляют собой данные, предназначенные для перезаписи, фреймы, обычно обозначаемые как фреймы входа и фреймы выхода, требуется располагать, соответственно, перед и после кластера, используемого в качестве блока перезаписи. Фреймы входа и фреймы выхода используются для соединения. Например, фрейм входа перед конкретным кластером включает область работы схемы АУМ (АРС) (автоматического управления мощности) для управления мощностью лазера, структуру ГПЧ (VFO) (генератора с перестраиваемой частотой) для ввода фазовой автоподстройки частоты ФАПС (PLL), структуру синхронизации для ввода синхронизации и область зазора между данным кластером и кластером, непосредственно предшествующим данному кластеру.
С другой стороны, фрейм выхода обычно включает структуру завершающей группы (postamble) и область зазора.
Однако, поскольку никакие другие данные в область, предназначенную только для воспроизведения, используемую для записи третьих данных, не записывают, область АУМ, область зазора и т.п. не требуются. Кроме того, поскольку последовательность данных, включающая информацию синхронизации и информацию адреса, формируется непрерывно с использованием матрицы, структура ГПЧ для ввода ФАПС также не требуется. Таким образом, синхронизация фрейма, синхронизация, основанная на номерах фреймов, и даже синхронизация адреса может быть установлена даже без фреймов входа.
Кроме того, поскольку после этого сразу же начинается следующий кластер, последовательность данных будет продолжаться и завершающая группа (postamble), то есть, фрейм выхода также не требуется.
Таким образом, в случае, когда третьи данные записаны в область, предназначенную только для воспроизведения, соединительные фреймы, известные как фреймы входа и выхода, могут быть исключены.
Как следует из приведенного выше описания, в соответствии с настоящим изобретением, с помощью способа записи, способа модуляции и оптимально используемой плотности записи для первых данных, вторых данных и третьих данных в том виде, как они представлены, возможно получить диск с однократной записью или с возможностью перезаписи, имеющий большую емкость для записи данных пользователя в виде первых данных, и обеспечить правильную запись информации времени поставки, служащей в качестве третьих данных.
Таким образом, настоящее изобретение обеспечивает возможность записи требуемого количества третьих данных, служащих в качестве предварительно записанной информации или информации времени поставки, которая не может быть сфальсифицирована, при обеспечении высокой ее надежности.
Кроме того, для использования диска, в соответствии с настоящим изобретением, не требуется существенно изменять устройство и схему, используемые в устройстве привода диска, так, что может быть реализована простая конфигурация без повышения стоимости.
Более подробно, настоящее изобретение содержит следующие свойства:
Для первых данных и для третьих данных используются одни и те же коды коррекции ошибки. При этом первые данные и третьи данные проходят процесс ЕСС (автоматической коррекции ошибки), осуществляемый с помощью общих аппаратных средств, что позволяет уменьшить стоимость устройства привода диска и упростить конфигурацию устройства.
Кроме того, первые данные содержат структуру первого блока коррекции ошибки, в то время как третьи данные содержат структуру второго блока коррекции ошибки. То есть, первые данные и третьи данные имеют соответствующие им структуры блоков коррекции ошибки.
В частности, плотность записи третьих данных меньше, чем плотность записи первых данных, и количество кодов коррекции в первом блоке коррекции ошибки устанавливается кратным m, в то время как количество кодов коррекции во втором блоке коррекции ошибки устанавливается кратным n/m от количества кодов коррекции в первом блоке коррекции ошибки, и количество данных во втором блоке коррекции ошибки устанавливают кратным n/m от количества данных в первом блоке коррекции ошибки, так что первые данные и третьи данные имеют не только собственные структуры блоков коррекции ошибки, но структуры коррекции ошибки также доступны обработке коррекции ошибки.
Кроме того, даже если первый блок коррекции ошибки включает структуру первого фрейма, структуру первого подблока, включающую первые коды коррекции ошибки, такие как LDC (код с большим расстоянием), и структуру второго подблока, включающую вторые коды коррекции ошибки, такие как BIS (подкод, индицирующий пакет), в то время как второй блок коррекции ошибки включает структуру второго фрейма, структуру третьего подблока, включающую первые коды коррекции ошибки, такие как LDC, и структуру четвертого подблока, включающую вторые коды коррекции ошибки, такие как BIS, для первых данных и третьих данных, используются одни и те же коды коррекции ошибки, и, кроме того, первые данные и третьи данные имеют соответствующие им блоки коррекции ошибки.
В частности, в этом случае, плотность записи третьих данных выбирают меньшей, чем плотность записи первых данных, количество первых кодов коррекции, составляющих первый подблок, устанавливается кратным m, в то время как количество первых кодов коррекции, составляющий третий подблок, устанавливают кратным n/m, количество кодов коррекции, составляющих первый подблок, и, кроме того, количество вторых кодов коррекции, составляющих второй подблок, устанавливают кратным р, в то время как количество вторых кодов коррекции, составляющих четвертый подблок, устанавливают кратным q/p от количества кодов коррекции, составляющих второй подблок, так, чтобы первые данные и третьи данные не только содержали соответствующие им структуры блока коррекции ошибки, но структуры коррекции ошибки также были доступны обработке коррекции ошибки.
В этих случаях оптимальные значения целых чисел n и m равны степени двух и единице, соответственно.
Кроме того, область, предназначенная только для воспроизведения, используется в качестве области для записи третьих данных способом качания канавки. При этом больше не нужно записывать третьи данные с использованием рельефных углублений. Кроме того, поскольку нет необходимости производить запись в виде рельефных углублений, глубина канавки может быть уменьшена. Глубина канавки может быть установлена на оптимальном значении для обеспечения высокой плотности записи без учета характеристик воспроизведения рельефных углублений. Таким образом, становится возможным сформировать канавку, пригодную для высокой плотности записи.
Кроме того, в устройстве привода диска третьи данные могут воспроизводиться при использовании той же системы воспроизведения с качанием канала, что и для вторых данных или информации адреса ADIP. Воспроизведение третьих данных означает выделение информации о форме качания канавки, в которой записаны третьи данные.
Кроме того, поскольку плотность записи третьих данных, записанных в форме качания канавки, может быть менее плотной, чем плотность записи первых данных, может быть обеспечено воспроизведение третьих данных с высокой плотностью, даже при плохом отношении сигнал-шум, поскольку третьи данные воспроизводятся как сигнал качания.
Кроме того, третьи данные записаны после выполнения процесса двухфазной модуляции, такой как FM кодовая модуляция (частотная манипуляция). Таким образом, сигнал может рассматриваться как узкополосный сигнал, что позволяет улучшить отношение сигнал-шум. Кроме того, при этом цепи ФАПС и цепи детектирования могут быть построены с помощью простых аппаратных средств.
В качестве альтернативы третьи данные модулируют с помощью той же техники, что и первые данные. Даже в этом случае для первых данных и третьих данных может использоваться конфигурация общей цепи демодуляции, так что устройство привода диска может быть упрощено.
Кроме того, третьи данные включают информацию адреса. Таким образом, устройство привода диска позволяет правильно осуществлять доступ к области, предназначенной только для воспроизведения, и правильно выполнять операцию воспроизведения данных из области, предназначенной только для воспроизведения, на основе адресов, включенных в третьи данные.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1А и 1В показаны пояснительные схемы, изображающие канавки, сформированные на диске, в соответствии с одним из вариантов воплощения настоящего изобретения;
на фиг.2 изображена пояснительная схема, представляющая конфигурацию областей всего диска, в данном варианте воплощения;
на фиг.3А и 3В представлены пояснительные схемы, изображающие способ вобуляции, используемый для канавки, сформированной на диске, в данном варианте воплощения;
на фиг.4 изображена пояснительная схема, представляющая блок ЕСС и структуры фреймов данных, записанных в виде отметок с изменением фазы, в данном варианте воплощения;
на фиг.5А - 5С показаны пояснительные схемы, представляющие структуры блоков ЕСС, записанных как отметки с изменением фазы, в данном варианте воплощения;
на фиг.6 показана пояснительная схема, представляющая структуру фрейма RUB отметки с изменением фазы, в данном варианте воплощения;
на фиг.7А - 7С представлены поясняющие схемы, изображающие способ модуляции информации ADIP, в данном варианте воплощения;
на фиг.8А и 8В изображены пояснительные схемы, представляющие блоки адреса в RUB, в данном варианте воплощения;
на фиг.9А и 9В изображены пояснительные схемы, представляющие часть синхронизации, в данном варианте воплощения;
на фиг.10А - 10Е изображены пояснительные схемы, представляющие структуры битов синхронизации, в данном варианте воплощения;
на фиг.11А - 11В изображены пояснительные схемы, представляющие часть данных, в данном варианте воплощения;
на фиг.12А - 12С изображены пояснительные схемы, представляющие структуры битов ADIP, в данном варианте воплощения;
на фиг.13 изображена пояснительная схема, представляющая структуру ЕСС информации ADIP, в данном варианте воплощения;
на фиг.14А - 14К представлены пояснительные схемы, изображающие способ модуляции предварительно записанной информации, в данном варианте воплощения;
на фиг.15 изображена пояснительная схема, представляющая блок ЕСС предварительно записанной информации фреймов данных, в данном варианте воплощения;
на фиг.16А - 16D изображены пояснительные схемы, представляющие структуры блоков ЕСС предварительно записанной информации, в данном варианте воплощения;
на фиг.17 изображена пояснительная схема, представляющая структуру фрейма кластера предварительно записанной информации, в данном варианте воплощения;
на фиг.18 изображена пояснительная схема, представляющая структуру фрейма кластера предварительно записанной информации, в данном варианте воплощения;
на фиг.19 изображена пояснительная схема, используемая для описания процесса преобразования последовательности данных подблока LDC, в данном варианте воплощения;
на фиг.20 изображена пояснительная схема, используемая для описания процесса преобразования последовательности данных подблока LDC, в данном варианте воплощения;
на фиг.21 изображена пояснительная схема, используемая для описания процесса преобразования последовательности данных подблока LDC, в данном варианте воплощения;
на фиг.22А и 22В изображены пояснительные схемы, представляющие конфигурацию подблока BIS, в данном варианте воплощения;
на фиг.23 изображена пояснительная схема, используемая для описания процесса преобразования последовательности данных подблока BIS, в данном варианте воплощения;
на фиг.24 изображена пояснительная схема, используемая для описания процесса преобразования последовательности данных подблока BIS, в данном варианте воплощения;
на фиг.25 изображена пояснительная схема, используемая для описания процесса преобразования последовательности данных подблока BIS, в данном варианте воплощения;
на фиг.26 изображена пояснительная схема, используемая для описания структуры фрейма, которая выполняется при записи данных подблоков LDC и BIS на диск;
на фиг.27 изображена пояснительная схема, представляющая блок ЕСС предварительно записанной информации и фреймов данных, в данном варианте воплощения;
на фиг.28 изображена пояснительная схема, представляющая структуру фрейма кластера предварительно записанной информации, в данном варианте воплощения;
на фиг.29 изображена пояснительная схема, представляющая структуру фрейма кластера предварительно записанной информации, в данном варианте воплощения;
на фиг.30 изображена пояснительная схема, представляющая синхронизации фреймов предварительно записанной информации, в данном варианте воплощения;
на фиг.31 изображена пояснительная схема, представляющая структуру синхронизации фреймов предварительно записанной информации, в данном варианте воплощения;
на фиг.32 изображена блок-схема, представляющая типичную конфигурацию устройства привода диска, в данном варианте воплощения;
на фиг.33 изображена блок-схема, представляющая типичную конфигурацию цепи вобуляции, используемой в устройстве привода диска, в соответствии с данным вариантом воплощения; и
на фиг.34 изображена блок-схема, представляющая типичную конфигурацию устройства нарезки, предназначенного для производства диска, в соответствии с данным вариантом воплощения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Далее в разделах, расположенных в порядке, представленном ниже, описаны оптический диск, выполненный в соответствии с одним из вариантов воплощения настоящего изобретения, устройство привода диска (или устройства записи/воспроизведения) для оптического диска и способ изготовления оптического диска.
Оптический диск, выполненный в соответствии с одним из вариантов воплощения настоящего изобретения, обычно известен как диск DVR (диск для записи данных и видеоинформации) и принадлежит к категории дисков, разработанных в последние годы.
1. Обзор варианта воплощения диска DVR, в соответствии с настоящим изобретением
2. Физические характеристики диска
3. Структура блока ЕСС данных пользователя
4. Адреса ADIP
5. Предварительно записанная информация (информация времени поставки)
6. Устройство привода диска
7. Способ изготовления дисков
8. Модифицированные версии
1. Обзор варианта воплощения диска DVR, в соответствии с настоящим изобретением
Прежде всего следует отметить, что в приведенном ниже описании показано, как технические формулировки, используемые в формуле изобретения настоящего изобретения, связаны с техническими формулировками, используемыми в пояснении варианта воплощения системы DVR. Само собой разумеется, что значения технических формулировок, используемых в формуле изобретения настоящего изобретения, не ограничиваются значениями технических формулировок, используемых в пояснении варианта воплощения.
Формулировка первых данных, используемая в формуле изобретения, соответствует формулировке данных пользователя, используемой при пояснении варианта воплощения. Данные пользователя представляют собой основные данные, служащие в качестве главного объекта записи и воспроизведения. Данные пользователя записывают в область записи/воспроизведения в виде меток с изменяемой фазой.
Вторые данные, используемые в формуле изобретения, соответствуют ADIP, используемым в пояснении варианта воплощения. ADIP представляет собой информацию предварительного адреса, записанную в форме вобулирования канавки в области записи/воспроизведения.
Третьи данные, используемые в формуле изобретения, соответствуют понятию "информация времени поставки", используемому в пояснениях настоящего варианта воплощения. Информация времени поставки представляет собой заранее записанную информацию в форме вобулирования канавки в области, предназначенной только для воспроизведения.
Первая техника модуляции, используемая в формуле изобретения, соответствует технике модуляции RLL (1, 7) РР, используемой в пояснении настоящего варианта воплощения.
Вторая техника модуляции, используемая в формуле изобретения, соответствует технике модуляции MSK, используемой в пояснении настоящего варианта воплощения.
Третья техника модуляции, используемая в формуле изобретения, соответствует технике двухфазной модуляции, используемой в пояснении настоящего варианта воплощения.
Термин "код коррекции", используемый в формуле изобретения, соответствует понятиям LDC (код с большим расстоянием) и BIS (подкод, индицирующий пакет), используемым при пояснении настоящего варианта воплощения.
Первый код коррекции, используемый в формуле изобретения, соответствует LDC (код с большим расстоянием).
Второй код коррекции, используемый в формуле изобретения, соответствует BIS.
Блок коррекции ошибки, используемый в формуле изобретения, соответствует блоку ЕСС, в котором используются LDC и BIS, как описано в пояснении данного варианта воплощения.
Первый и третий подблоки, используемые в формуле изобретения, соответствуют термину подблок LDC, используемому в пояснении настоящего варианта воплощения.
Термины второй и четвертый подблоки, используемые в формуле изобретения, соответствуют термину подблок BIS, используемому в пояснении данного варианта воплощения.
Блок данных пользователя, записанных на диск DVR в виде меток с изменением фазы, включает подблок собственно данных и подблок данных управления пользователя. Под собственно данными подразумевают данные пользователя. Данные управления пользователя представляют собой информацию дополнения и управления, предусмотренную для данных пользователя. Информация адреса, записываемая в данные отдельно от предварительной информации адреса, обозначаемая как ADIP, также может быть включена как часть информации дополнения и управления.
Для обеспечения возможности исправления ошибки во всем блоке данных используют коды коррекции ошибки, необходимые для подблоков. Этот вопрос будет более подробно описан ниже.
Таким образом, для данных пользователя создается подблок LDC, включающий LDC, каждый из которых используется как код коррекции ошибки. Для данных управления пользователя, с другой стороны, создается подблок BIS, который включает BIS, каждый из которых используется в качестве кода коррекции ошибки.
Фрейм данных создается для сжатия участков данных, для которых созданы подблок LDC и подблок BIS.
Поскольку нежелательно использовать одинаковое количество кодов коррекции ошибки, количество участков данных в фрейме данных, для которых были созданы подблоки LDC и BIS, содержащие коды коррекции ошибки, подсчет участков данных в фрейме данных выполнен приблизительно равным или меньшим сумме подсчета чередования кодов коррекции ошибки или сумме подсчета кода.
Под тем же обозначением блок данных или информация времени поставки включает подблок предварительно записанных данных и подблок предварительно записанных данных управления. Предварительно записанные данные представляют собой собственно данные, предварительно записанные в качестве информации времени поставки. С другой стороны, предварительно записанные данные управления представляют собой информацию дополнения и управления, предварительно записанную для информации времени поставки.
Для обеспечения возможности исправления ошибки во всем блоке данных используют коды коррекции ошибки, необходимые для подблоков. То есть, в этом варианте воплощения для собственно данных, предварительно записанных в виде информации времени поставки, создается подблок LDC, который включает каждый LDC, используемый в качестве кода коррекции ошибки. С другой стороны, для предварительно записанных данных управления создается подблок BIS, который включает BIS, каждый из которых используется в качестве кода коррекции ошибки.
Кроме того, для блока информации времени поставки создается фрейм данных для сжатия участков данных, для которых созданы подблок LDC и подблок BIS. Кроме того, подсчет участка данных в фрейме данных сформирован приблизительно равным или меньше, чем сумма подсчетов чередований кодов коррекции ошибки или сумма подсчетов кода.
Так в подблоках собственно данных используются одни и те же коды коррекции ошибки, а именно, LDC, независимо от того, являются ли собственно данные данными пользователей или предварительно записанными данными. С другой стороны, в подблоках информации дополнения и управления используются одни и те же коды коррекции ошибки, а именно, BIS, независимо от того, является ли информация дополнения и управления данными управления пользователя или предварительно записанными данными управления.
В соответствии с этим способом, подблок собственно данных в блоке данных пользователя включает m кодов коррекции ошибки LDC. В попытке сделать размер блока данных, предварительно записанных как информация поставки, отличающимся от размера блока данных пользователей для соответствия уменьшению плотности записи предварительно записанных данных как информации времени поставки, в блоке предварительно записанных данных создается такой подблок собственно данных, что он включает n/m кодов коррекции ошибки LDC.
В этом случае предпочтительно устанавливать эффективное значение подсчета частей данных подблока собственно данных в блоке данных пользователя кратным степени двух, например, равным 2048 байт.
Аналогично, предпочтительно устанавливать эффективное значение подсчета частей данных подблока собственно данных в блоке данных, предварительно записанных как информация времени поставки, также кратным степени двух, например, равным 2048 байт.
Если добавляется EDC или аналогичный код, подсчет эффективного значения участков данных в некоторых случаях может стать равным величине, отличающейся от степени двух. Тем не менее, для того, чтобы эффективный подсчет участков данных подблока собственно данных в блоке данных пользователя и эффективный подсчет участков данных в подблоке собственно данных в блоке данных, предварительно записанных в качестве информации времени поставки, был кратным степени двух, необходимо, чтобы значение m было равно степени двух.
Кроме того, если эффективный подсчет участков данных подблока, собственно данных в блоке данных пользователя и эффективный подсчет участков данных в подблоке собственно данных в блоке данных, предварительно записанных как информация времени поставки, равны степени двух, то есть, n=1, легко обеспечивается доступ к данным.
Подблок информации дополнения и управления в блоке данных пользователей составляет р кодов коррекции ошибки BIS. В попытке изменить размер блока данных, предварительно записанных как информация поставки, и размер блока данных пользователей для соответствия уменьшению плотности записи данных, предварительно записанных как информация времени поставки, создается подблок собственно данных в блоке данных, предварительно записанных как информация времени поставки, так что он содержит q/p кодов коррекции ошибки BIS.
Поскольку информация дополнения и управления представляет собой просто информацию, сформированную для собственно данных, нет необходимости устанавливать значение р равным степени двух и q=1.
Поскольку данные создаются в области, предназначенной только для воспроизведения, используемой для записи информации времени поставки с помощью матрицы, одновременно с этим может быть записана информация адреса как часть информации времени поставки. При этом устройство привода диска позволяет осуществлять доступ с использованием этой информации адреса.
Синхрогруппа и идентификатор синхронизации сформированы для части фрейма информации времени поставки, в то время как номер блока адреса сформирован для определенной части фрейма.
Более конкретно, в системе DVR синхрогруппа и идентификатор синхронизации сформированы в части данных, соответствующих подблоку собственно данных в фрейме информации времени поставки, в то время как номер блока адреса сформирован для части данных, соответствующей подблоку дополнения и управления в фрейме информации времени поставки.
Поскольку информация предварительного адреса (или ADIP) записана заранее в области записи/воспроизведения, предназначенной для записи данных пользователя, доступ, собственно говоря, может обеспечиваться даже, если существует минимальная синхрогруппа. Тем не менее, наличие синхрогруппы, идентификатора синхронизации и номера блока адреса не создает проблему, даже если они будут сформированы.
Кроме того, для данных пользователя требуются фреймы, обычно обозначаемые как фреймы входа и фреймы выхода, размещаемые, соответственно, перед кластером, служащим в качестве блока перезаписи, и после него. Фреймы входа и выхода используются для соединения. Фрейм входа перед конкретным кластером включает область работы АУМ, предназначенную для управления мощностью лазера, структуру ГПЧ для захвата ФАПС, синхрогруппу для синхронизации ввода и области зазора (GAP) между конкретным кластером и кластером, непосредственно предшествующим данному кластеру. С другой стороны, выходной фрейм обычно включает структуру завершающей группы (postamble) и область зазора (GAP).
Однако, поскольку никакие другие данные не записывают в область, предназначенную только для воспроизведения, которая используется для записи информации времени поставки, область АУМ, область GAP и т.п., не требуются. Кроме того, поскольку последовательности данных, включая информацию синхронизации и информацию адреса, создаются следующими непрерывно с использованием матрицы, структура ГПЧ для захвата ФАПС также не требуется. Таким образом, даже без использования фрейма входа могут быть установлены синхронизация фрейма, синхронизация, основанная на номерах фреймов, и даже синхронизация адреса.
Кроме того, поскольку следующий кластер также начинается непосредственно после данного кластера, последовательность данных будет непрерывной, и завершающая группа (postamble), то есть, фрейм выхода, также не требуется.
Таким образом, в случае информации времени поставки, записанной в области, предназначенной только для воспроизведения, соединительные фреймы, известные как фреймы входа и выхода, могут быть исключены.
2. Физические характеристики диска
Вариант воплощения подробно поясняется следующим образом:
Прежде всего описаны физические характеристики диска, используемые в данном варианте воплощения, и вобулированная дорожка, формируемая на диске.
Оптический диск, в соответствии с данным вариантом воплощения, обычно известен как диск DVR (диск для записи данных и видеоинформации) и принадлежит к категории дисков, разработанных в последние годы. В частности, в данном оптическом диске используется новая техника вобуляции в качестве техники записи DVR.
Оптический диск, в соответствии с данным вариантом воплощения, представляет собой оптический диск, на который данные записывают с помощью способа изменения фазы. Оптический диск имеет следующие размеры: диаметр 120 мм и толщину 1,2 мм. С точки зрения внешнего вида, что касается диаметра и толщины, оптический диск, в соответствии с данным вариантом воплощения, выглядит так же, как система CD-диска (компакт-диска) или система диска DVD (универсальный цифровой диск).
Луч лазера для записи и воспроизведения данных имеет длину волны 405 нм. Такой луч лазера представляет собой так называемый синий лазер. Числовая апертура (NA) оптической системы установлена на значении 0,85.
Дорожки, вдоль которых записаны метки с изменяющейся фазой, имеют шаг дорожки 0,32 мкм и линейную плотность 0,12 мкм.
При этом реализована емкость записи данных пользователя, составляющая приблизительно 23 Гб.
Для записи используется техника записи канавки. То есть, на диске предварительно размечается дорожка в виде канавки, и данные записывают вдоль этой канавки.
На фиг.1А показана пояснительная схема, представляющая модель канавки GV, создаваемой на диске. Как показано на этой фигуре, канавка GV создается так, что она формируется в виде спиральной формы по поверхности диска, проходящей от внутренней окружности к внешней окружности. В качестве альтернативы канавка GV может быть сформирована в виде концентрических окружностей.
Данные записывают и воспроизводят при вращении диска в условиях ПЛС (CLV) (постоянной линейной скорости). Таким образом, поскольку канавка GV также вращается в условиях ПЛС, количество волн вобулирования на круг дорожки увеличивается, если рассматривать его для точки, перемещающейся в радиальном направлении от внутренней окружности к внешней окружности.
На фиг.1В показана поясняющая схема, представляющая канавки GV, каждая из которых имеет вобулированную форму, указывающую физические адреса.
Как показано на фигуре, левая и правая стенки канавки GV изогнуты так, что они представляют сигнал, генерируемый на основе информации адреса или подобной информации.
Площадка L представляет собой зазор между двумя соседними канавками GV. Как описано выше, данные записывают вдоль канавки GV. То есть, канавка GV представляет собой дорожку данных. Следует отметить, что данные также могут быть записаны вдоль площадки L. В этом случае площадка L будет представлять собой дорожку данных. В качестве другой альтернативы данные записывают вдоль канавки GV, а также вдоль площадки L, так что в данном случае оба этих элемента будут представлять собой дорожки данных.
На фиг.2 изображена пояснительная схема, представляющая структуру конфигурации областей всего диска.
Область диска физически разделена на подобласти, называемые, начиная с внутренней стороны, вводной зоной, зоной данных и выходной зоной.
С другой стороны, с точки зрения функционирования, поверхность диска разделена на зону РВ (или зону, предназначенную только для воспроизведения) и зону RW (или зону записи/воспроизведения). Зона РВ расположена на стороне внутренней окружности вводной зоны, и зона RW занимает область, проходящую от стороны внешней окружности вводной зоны до выходной зоны.
Вводная зона представляет собой зону на внутренней стороне внутри окружности с радиусом 24 мм. Зона предварительно записанных данных представляет собой область вводной зоны между окружностями с радиусом 22,3 мм и с радиусом 23,1 мм.
Зона предварительно записанных данных используется для предварительной записи информации времени поставки (или предварительно записанной информации) с использованием вобулированной канавки, создаваемой на диске в виде спирали. Информация времени поставки представляет собой информацию, предназначенную только для воспроизведения, которая не может быть перезаписана. Зона предварительно записанных данных представляет собой зону РВ (или область, предназначенную только для воспроизведения), как указано выше.
Область вводной зоны между окружностью с радиусом 23,1 мм и окружностью с радиусом 24 мм используется в качестве области проверки записи и области управления дефектами.
Область проверки записи обычно используется как область пробной записи для установки условий записи и воспроизведения меток с изменением фазы. Условия включают мощность луча лазера, используемого при операциях воспроизведения и записи.
Область управления дефектами используется для записи и воспроизведения данных, включающих информацию управления дефектами, имеющимися на диске.
Зона между окружностью с радиусом 24,0 мм и окружностью с радиусом 58,0 мм используется как зона данных. Зона данных - это область, в которой, собственно, записывают и воспроизводят данные пользователя на основе меток с изменяемой фазой.
Зона между окружностью с радиусом 58,0 мм и окружностью с радиусом 58,5 мм представляет собой выходную зону. Во многом, так же как и вводная зона, выходная зона включает область управления дефектами и буферную зону, которая позволяет устранять последствия переполнения при поиске.
Область, проходящая от окружности с радиусом 23,1 мм, то есть, от начала области проверки записи до выходной зоны, представляет собой зону RW (или зону записи/воспроизведения), описанную выше.
На фиг.3 показаны пояснительные схемы, представляющие соответственно дорожку, используемую в зоне RW, и дорожку, используемую в зоне РВ. В частности, на фиг.3А показана схема, изображающая форму вобулированной канавки в зоне RW, и на фиг.3В показана схема, изображающая форму вобулированной канавки в зоне РВ.
В зоне RW информацию адреса (или ADIP) записывают заранее путем вобулирования создаваемой на диске канавки для формирования спиральной формы с целью обеспечения отслеживания дорожки.
В канавке записывают и воспроизводят информацию, которая включает внедренную информацию адреса с помощью меток с изменением фазы.
Как показано на фиг.3А, канавка в зоне RW, то есть, дорожка в виде канавки, включающая внедренную информацию адреса ADIP, имеет шаг дорожек ТР 0,32 мкм.
На этой дорожке записываются метки с изменением фазы, каждая из которых служит в качестве метки записи. При использовании техники модуляции RLL (1, 7) РР или подобной, метки с изменением фазы записывают с линейной плотностью 0,12 мкм/бит или 0,08 мкм/бит канала. RLL означает кодирование с ограничением длины поля записи, и РР - сохранение четности/запрет RMTR (повторяемая минимальная передача длины поля записи).
Пусть IT представляет бит одного канала. В этом случае длина метки представляет значение в диапазоне от 2Т до 8Т, то есть, минимальная длина метки равна 2Т.
Как описано выше, информацию адреса записывают в виде формы вобуляции канавки с периодом вобуляции 69Т и амплитудой вобуляции WA, составляющей приблизительно 20 нм (от пика до пика).
Полосу частот информации адреса устанавливают таким образом, чтобы она не перекрывалась полосой частот меток с изменением фазы так, чтобы детектирование информации адреса и меток с изменением фазы не влияли друг на друга.
В ширине полосы пропускания 30 кГц информация адреса, записанная в виде вобуляции, имеет CNR (отношение мощности сигнала несущей к шуму) 30 дБ после записи, и частоту появления ошибки в адресе, не превышающую 1×10-3. Частота появления ошибки в адресе получается с учетом помех, таких как перекос диска, состояние расфокусировки и внешнее возмущение.
С другой стороны, дорожки, сформированные в виде канавки в зоне РВ, которая показана на фиг.3В, имеют больший шаг, чем у дорожек, сформированных в виде канавки в зоне RW, показанной на фиг.3А, и амплитуда вобуляции у них также больше, чем амплитуда вобуляции дорожки, созданной в виде канавки в зоне RW, показанной на фиг.3А.
Точнее говоря, дорожка, показанная на фиг.3В, имеет шаг дорожки ТР, равный 0,35 мкм; период вобуляции, равный 36Т, и амплитуду вобуляции WA, равную 40 нм (от пика до пика). Период вобуляции 36Т подразумевает, что линейная плотность записи предварительно записанной информации выше, чем линейная плотность записи информации адреса ADIP. Кроме того, поскольку минимальная длина метки для меток с изменением фазы равна 2Т, линейная плотность записи предварительно записанной информации ниже, чем линейная плотность записи меток с изменением фазы.
Дорожка в зоне РВ не используется для записи меток с изменением фазы.
Колебания, представляющие записанные данные в зоне RW, имеют синусоидальную форму, в то время как колебания, представляющие записанные данные в зоне РВ, имеют синусоидальную или прямоугольную форму.
При работе в ходе записи или воспроизведения меток с изменением фазы, при использовании ЕСС (кодов коррекции ошибки), прикрепленных к данным, частота возникновения ошибки символа после коррекции ошибки может составлять 1×10-16, при условии, что сигнал имеет высокое качество такое, как CNR 50 дБ при полосе пропускания 30 кГц. Такое использование меток с изменением фазы известно для записи и воспроизведения данных.
Отношение мощности сигнала несущей к шуму CNR для вобулированного сигнала информации адреса ADIP составляет 35 дБ при полосе пропускания 30 кГц в состоянии отсутствия записанных меток с изменением фазы.
Для информации адреса качество сигнала такого порядка рассматривается как достаточное, если осуществляется защита интерполяции на основе так называемого распознавания непрерывности. Однако в случае заранее записанной информации в зоне РВ требуется обеспечить качество сигнала, эквивалентное или лучше, чем CNR 50 дБ для меток с изменением фазы. По этой причине в зоне РВ создается канавка, физически отличающаяся от канавки в зоне RW, как показано на фиг.3В.
Эти отличия состоят в том, что, во-первых, благодаря увеличению шага дорожек, подавляется перекрестная помеха от соседних дорожек. Во-вторых, путем увеличения амплитуды вобуляции вдвое, повышают CNR на +6 дБ.
Кроме того, благодаря формированию колебаний с прямоугольной формой, CNR дополнительно повышается на +2 дБ. В результате, суммарное улучшение CNR составляет 43 дБ (=35 дБ + 6 дБ + 2 дБ).
Разница в полосе записи вобуляции между зоной, предназначенной для записи меток с изменением фазы, и зоной, предназначенной для предварительно записанных данных, соответствует периоду вобуляции 18T, который составляет половину периода вобуляции 36Т. При минимальной длине метки 2Т для длины меток с изменением фазы достигается дополнительное улучшение CNR на 9,5 дБ.
В результате значение CNR предварительно записанной информации эквивалентно уровню 52,5 дБ (=43 дБ + 9,5 дБ). Таким образом, даже, если перекрестные помехи от соседних дорожек приведут к ухудшению уровня CNR на -2 дБ, уровень CNR все еще останется равным 50,5 дБ (52,5 дБ - 2 дБ). Таким образом, возможно обеспечить качество сигнала, эквивалентное или превышающее CNR 50 дБ для меток с изменением фазы для обеспечения достаточной степени пригодности вобулированного сигнала для использования при операциях записи и воспроизведения предварительно записанной информации.
3. Структура блока ЕСС данных пользователя
Структура блока ЕСС данных пользователя, записанных в зоне RW (или в зоне записи/воспроизведения) в виде меток с изменением фазы, поясняется со ссылкой на фиг.4.
Блок данных пользователя физически занимает приблизительно 32 сектора. С точки зрения содержания, блок данных включает подблок данных пользователя и подблок данных управления пользователя.
Как показано на фиг.4, подблок данных пользователя формирует модуль, имеющий размер 64 килобайта (=2048 байт ×32 сектора).
К каждому сектору добавляют 4 байта EDC (код обнаружения ошибки) для формирования модуля фрейма данных. 32 модуля фрейма данных формируют фрейм данных, имеющий размер 2052 байта ×32 сектора. Фрейм данных дополнительно скремблируют (шифруют путем перестановки участков групп символов) для получения скремблированного фрейма данных.
Затем скремблированный фрейм данных подвергают процессу кодирования Рида-Соломона (RS) для получения блока данных из 216 рядов и 304 колонок. К блоку данных дополнительно добавляют тридцать два ряда проверки на четность для генерирования подблока LDC (кода с большим расстоянием). LDC представляет собой блок коррекции для взаимного кода с большим расстоянием. Подблок LDC представляет собой блок RS (248, 216, 33)×304.
Затем из подблока LDC формируют кластер LDC, включающий 496 рядов ×152 байта.
На фиг.5А и 5В изображены схемы, представляющие процесс кодирования подблока данных пользователя в подблок LDC.
Данные пользователя размером 64 Кб, показанные на фиг.5А, подвергают процессу кодирования ЕСС для получения подблока LDC, который показан на фиг.5В. Более подробно, 4 байта EDC (код обнаружения ошибки) добавляют к каждому сектору размером 2048 байт основных данных (данных пользователя). 32 сектора данных пользователя затем кодируют в подблок LDC. Как указано выше, подблок LDC представляет собой код RS (Рида-Соломона) с RS (248, 216, 33) с длиной кода 248 полубайтов, с размером данных 216 полубайтов и с расстоянием кода 33 полубайта, и имеет размер блока 304 кодовых слова.
С другой стороны, подблок данных управления пользователя имеет размер 18 байт ×32 модуля (576 байт), как показано на фиг.4. Номера модулей адреса, имеющие размер 9 байт ×16 адресов (144 байта), добавляют к подблоку данных управления пользователя для генерирования модуля кодирования, имеющего размер 720 байт (=576 байт +144 байта).
720 байт подвергают процессу кодирования Рида-Соломона для получения блока доступа размером 30 рядов ×24 колонки.
Затем добавляют 32 ряда проверки на четность для формирования подблока BIS (подкод, индицирующий пакет). BIS представляет собой подкод, инициирующий положение пакета ошибки оптического диска. Подблок BIS представляет собой RS (62, 30, 33)×24 блока. Затем из подблока BIS формируют кластер BIS из 496 рядов ×3 бита.
На фиг.5С и 5D показаны схемы, изображающие процесс кодирования данных управления пользователя и номера модуля адреса, которые имеют общий размер 720 байт, в подблок BIS.
Таким образом, 720 байт данных, показанные на фиг.5С, подвергают процессу кодирования ЕСС для генерирования подблока BIS, изображенного на фиг.5D. Как указано выше, подблок BIS представляет собой код RS (Рида-Соломона) с RS (62, 30, 33), длиной кода 62 полубайта, размером данных 30 полубайт, расстоянием кода 33 полубайта и имеет размер блока 24 кодовых слова.
Как показано на фиг.4, каждый из кластеров LDC и BIS, которые используются в качестве модуля записи/воспроизведения, формирует 496 рядов, каждый из которых составляет фрейм данных. Фрейм данных кластера LDC формирует 152 байта, в то время как фрейм данных кластера BIS формирует 3 байта.
Таким образом, комбинированный фрейм данных составляет 155 байт (=152 байта +3 байта). Как показано на фигуре, в комбинированном фрейме данных четыре поля LDC, каждое из которых имеет размер 38 байт, и три поля BIS, каждое из которых имеет размер 1 байт, расположены поочередно так, что формируется фрейм данных размером 155 байт в одном ряду. 496 рядов или 496 фреймов данных, каждый из которых имеет размер 155 байт (=1240 бита), составляет блок ЕСС.
Каждый из фреймов данных подвергают процессу модуляции RLL (1, 7) РР, при котором биты DCC и синхронизацию фрейма добавляют для генерирования фрейма записи. Бит DCC - это бит, который позволяет удалить из фрейма компоненты DC. Более подробно, данные (1240 бит), полученные в результате процесса модуляции, делят на стартовую группу, размещенную в начале фрейма, размером 25 бит, и 27 групп, следующих после стартовой группы по 45 бит, и затем 1 бит DCC вводят в место положения справа, позади каждой из групп. С другой стороны, синхронизацию фрейма с размером 20 бит помещают в место положения перед стартовой группой для получения фрейма записи с размером 1288 бит (1240 бит исходного фрейма +20 бит фрейма синхронизации +28 бит DCC). 1288 бит фрейма записи подвергают процессу модуляции RLL (1, 7) РР для генерирования 1932 битов канала, модулированного фрейма записи. В процессе модуляции RLL (1, 7) РР каждые 2 бита данных фрейма записи преобразуют в 3 бита канала, модулированного фрейма записи.
Такие фреймы записи составляют структуру данных, которую записывают на дорожку в зоне RW на диске.
В случае диска DVR плотность записи должна составлять приблизительно 0,08 мкм на выходной бит канала при использовании процесса модуляции RLL (1, 7) PP.
Поскольку BIS представляет собой код, обладающий исключительной мощностью по коррекции ошибки по сравнению с кодом LDC, почти все возникающие ошибки корректируются. Таким образом, BIS представляет собой код с использованием расстояния кода 33 для длины кода 62.
Символы, служащие в качестве указателей ошибки, получаемых с помощью BIS с ошибками, могут использоваться следующим образом.
В процессе декодирования с использованием ЕСС сначала производят декодирование BIS. Предположим, что будут обнаружены две ошибки в последовательном коде BIS (или в фрейме синхронизации) в структуре фрейма данных, показанной на фиг.4. В этом случае данные размером 38 байт, размещенные между последовательными BIS, рассматриваются как пакет ошибки. Указатели ошибки добавляют к данным размером 38 байт. Затем выполняют процесс коррекции удаления указателя на основе LDC с использованием этих указателей ошибки.
Таким образом, мощность коррекции ошибки повышается по сравнению с мощностью коррекции ошибки при использовании только LDC.
BIS включает, кроме прочих данных, информацию адреса. Эти адреса могут использоваться для случая, в котором информация адреса не включена в канавку с вобуляцией, как в случае диска типа ROM (предназначенного только для воспроизведения).
На фиг.6 показана пояснительная схема, изображающая структуру кластера, включающего фреймы данных.
Каждый ряд, показанный на фигуре, соответствует фрейму данных размером 155 байт, как описано выше. Как пояснялось ранее, каждый фрейм данных модулируют для получения фрейма записи с размером 1932 бита на канал. 496 рядов или 496 фреймов составляют 1 блок ЕСС. Фрейм входа и фрейм выхода добавляют к блоку ЕСС, соответственно, перед 496 фреймами и после них для формирования RUB (блока модуля записи), содержащего 498 фреймов. RUB представляет собой кластер, описанный выше. Входной и выходной фреймы используют в качестве соединительных фреймов.
Кроме того, как описано выше, добавляют 16 адресов в качестве номера модуля адреса. Часть LDC кластера, исключая фреймы входа и выхода, включает 496 фреймов, которые разделены на 16 групп, каждая из которых содержит 31 фрейм, а именно, от фрейма 0 до фрейма 30. 16 адресов, а именно с номерами модуля от 0 до 15, назначают этим 16 группам по принципу один адрес для каждой группы.
4. Адреса ADIP
В приведенном ниже описании поясняются адреса ADIP, записанные в зоне RW в форме качания канавки.
На фиг.7 приведена пояснительная схема, представляющая использование техники MSK (манипуляция с минимальным сдвигом), которая представляет собой один из способов модуляции FSK (частотная манипуляция), которая используется для модуляции адресов ADIP при формировании качания канавки.
В качестве модуля детектирования данных используются два сегмента вобуляции. Следует отметить, что сегмент вобуляции представляет собой период вобуляции, определенный как период изменения несущей частоты с возвратом к исходному значению.
Данные, такие как адрес, подвергают процессу дифференциального кодирования перед процессом записи в модуль одной вобуляции (или модулей длины окна, показанных на фиг.7А). Более подробно, процесс дифференциального кодирования позволяет перед процессом записи закодировать входные данные, имеющие значение "единицы" в виде заранее записанных данных, также имеющих значение "единицы" в течение периода вобуляции между фронтами подъема и падения, как показано на фиг.7В.
Затем заранее записываемые данные подвергают процессу модуляции MSK для генерирования потока MSK, который показан на фиг.7С. Более подробно, заранее записываемые данные, имеющие значение "ноль", модулируют с преобразованием в значение несущей cos ωt или -cos ωt. С другой стороны, заранее записываемые данные, имеющие значение "единицы", модулируют с преобразованием в значение несущей cos 1,5ωt или -cos 1,5ωt с частотой в 1,5 раза выше, чем частота несущей, полученной в результате процесса модуляции MSK заранее записываемых данных, имеющих значение "ноль".
Предположим, что бит одного канала записываемых и воспроизводимых данных с изменением фазы соответствует одному каналу. В этом случае период несущей вмещает 69 каналов, как показано на фиг.7С.
Следует отметить, что 1 бит данных ADIP, в соответствии с процессом модуляции MSK, занимает 56 периодов вобуляции, в то время как в периоде вобуляции можно разместить 69 битов канала, полученных в результате процесса модуляции RLL (1, 7) РР для данных пользователя, как пояснялось выше со ссылкой на фиг.3А.
Таким образом, плотность записи битов данных ADIP составляет 1/2576 часть плотности записи данных пользователя, получаемую в результате процесса модуляции RLL (1, 7) PP.
В случае такого варианта воплощения для одного RUB (блока модуля записи) или одного кластера записи, который используется в качестве модуля записи данных пользователя, описанного выше, в качестве адреса ADIP могут быть включены три адреса.
На фиг.8 изображена пояснительная схема, представляющая состояние включения 3 блоков адреса, включающих 3 адреса, в 1 RUB. Как показано на фиг.6, RUB (или кластер записи) включает 496 фреймов, которые формируют блок ЕСС, и 2 фрейма, а именно, фрейм входа и фрейм выхода. При этом RUB содержит всего 498 фреймов, служащих в качестве модуля записи.
Как показано на фиг.8А, в сегменте, соответствующем 1 RUB, включены 3 блока адреса ADIP. Блок адреса состоит из 83 битов.
На фиг.8В показана схема, изображающая конфигурации блоков адреса. Блок адреса, состоящий из 83 битов, включает часть синхронизации (или часть сигнала синхронизации) с размером 8 бит и часть данных, имеющую размер 75 битов.
Часть синхронизации с размером 8 бит включает четыре модуля, каждый из которых состоит из 1 монотонного бита и 1 бита синхронизации.
С другой стороны, часть данных, имеющая размер 75 бит, включает 15 модулей блока ADIP, каждый из которых состоит из 1 монотонного бита и 4 битов ADIP.
Один монотонный бит, один бит синхронизации и один бит ADIP занимают 56 периодов вобуляции. В начале бита расположена метка MSK, которая служит в качестве синхронизации бита.
Каждый из периодов вобуляции определен как переключение несущей частоты на другое значение с возвратом в исходное значение для монотонного бита, следующего после метки MSK монотонного бита. Ниже будет описано устройство бита синхронизации и бита ADIP. В любом случае периоды вобуляции в форме модуляции MSK создают для бита синхронизации, который следует после метки MSK бита синхронизации. Другими словами, периоды вобуляции с формой колебания, в соответствии с модуляцией MSK, создаются для бита ADIP, который следует после метки MSK бита ADIP.
На фиг.9 приведена пояснительная схема, представляющая конфигурацию части синхронизации.
Как очевидно следует из фиг.9А и 9В, часть синхронизации, имеющая размер 8 бит, включает четыре блока синхронизации, а именно, блоки синхронизации "0", "1", "2" и "3", каждый из которых состоит из двух битов, а именно, монотонного бита и бита синхронизации.
Более конкретно,
блок синхронизации "0" состоит из монотонного бита и бита синхронизации "0",
блок синхронизации "1" состоит из монотонного бита и бита синхронизации "1",
блок синхронизации "2" состоит из монотонного бита и бита синхронизации "2" и
блок синхронизации "3" состоит из монотонного бита и бита синхронизации "3".
Как описано выше, монотонный бит в каждом блоке синхронизации представляет собой вобуляции, занимающие несколько периодов колебаний несущей с одной частотой. Более подробно, монотонный бит включает 56 периодов колебаний, как показано на фиг.10А. В начале 56 периодов колебаний помещают отметку bs MSK, которая служит в качестве синхронизации бита bs. Каждый из остальных периодов колебаний на одной частоте несущей создается для монотонного бита, который следует после метки MSK монотонного бита. Следует отметить, что структура метки MSK показана за пределами периода колебаний на каждой из фиг.10А - 10Е.
Как описано выше, существует 4 вида битов синхронизации, а именно, бит синхронизации "0", бит синхронизации "1", бит синхронизации "2" и бит синхронизации "3". Бит синхронизации "0", бит синхронизации "1", бит синхронизации "2" и бит синхронизации "3" преобразуются в структуру формы качания, показанную на фиг.10В, 10С, 10D и 10Е, соответственно.
В случае структуры формы вобуляции для бита синхронизации "0", показанной на фиг.10В, в начале присутствует отметка MSK, которая служит в качестве синхронизации бита bs. После начальной отметки MSK следует вторая отметка MSK, отделенная от ведущей MSK на 16 периодов колебаний. После этого последующие отметки MSK следуют за второй отметкой MSK через интервал 10 периодов колебаний.
В случае структуры формы вобуляции для синхронизации "n" вторая отметка MSK находится в положении со сдвигом по отношению ко второй отметке MSK бита синхронизации "n-1" на 2 периода колебаний, и после этого последующие отметки следуют в местах положения со сдвигом после соответствующих последовательных отметок MSK бита синхронизации "n-1" на два периода колебаний, где n = от 1 до 3.
Более конкретно, в случае структуры формы вобуляции для бита синхронизации "1", которая показана на фиг.10С, отметка MSK, находящаяся в начале, служит в качестве синхронизации бита bs, после ведущей отметки MSK bs следует вторая отметка MSK, отделенная от ведущей MSK на 18 периодов колебаний. Последующие периоды метки MSK следуют после второй метки MSK через интервалы 10 периодов колебаний.
Другим словами, в случае структуры формы вобуляции для бита синхронизации "2", которая показана на фиг.10D, существует метка MSK в начале, которая служит в качестве синхронизации бита. После ведущей метки MSK следует вторая метка MSK, которая отделена от ведущей MSK на 20 периодов колебаний. После этого за второй меткой MSK следует последующая метка MSK через интервал 10 периодов колебаний.
Точно так же в случае структуры формы вобуляции для бита синхронизации "3", которая показана на фиг.10Е, вначале расположена метка MSK, которая служит в качестве синхронизации бита bs. После ведущей метки MSK следует вторая метка MSK, отделенная от ведущей метки MSK на 22 периода колебаний. После этого за второй меткой MSK следуют последующие метки MSK через интервалы 10 периодов колебаний.
Каждая структура синхронизации включает уникальную структуру для монотонного бита и бита синхронизации, а также битов ADIP, которые будут описаны ниже. Как описано выше, существуют четыре различные структуры синхронизации. Благодаря включению каждой из таких различных структур бита синхронизации в каждый блок синхронизации части синхронизации для устройства привода диска, обеспечивается возможность детектирования и распознавания любой из таких структур бита синхронизации, включенных в блоки синхронизации, а также устанавливать синхронизацию.
Ниже приведено описание со ссылкой на фиг.11, поясняющее часть данных блока адреса со ссылкой на фиг.11. Как показано на фиг.11А и 11В, часть данных включает 15 блоков ADIP, а именно, блоки ADIP от "0" до "14", каждый из которых состоит из 5 битов.
Каждый из блоков ADIP длиной 5 битов включает один монотонный бит и 4 бита ADIP.
Практически так же, как и блок синхронизации, 1 монотонный бит блока ADIP занимает 56 периодов колебаний. В начале бита находится метка MSK, которая служит в качестве синхронизации бита bs. Периоды колебаний, определяемые как колебания несущей частоты, создаются для монотонных битов, следующих после метки MSK монотонного бита. Форма колебаний, представляющая метку MSK и следующие периоды колебаний, показана на фиг.12А.
Поскольку блок ADIP включает 4 бита ADIP, 15 блоков ADIP могут содержать 60 битов ADIP информации адреса.
Структуры формы вобуляции битов ADIP "1" и "0" показаны на фиг.12В и 12С, соответственно.
Как показано на фиг.12В, в случае структуры формы вобуляции бита ADIP "1", в начале расположена метка MSK и служит в качестве синхронизации бита bs. После ведущей метки MSK следует вторая метка MSK, отделенная от ведущей метки MSK на 12 периодов колебаний.
Как показано на фиг.12С, в случае структуры "0" формы вобуляции бита ADIP, в начале также расположена метка MSK, которая служит в качестве бита bs. Однако после ведущей метки MSK следует вторая метка MSK, отделенная от ведущей метки MSK на 14 периодов колебаний.
Как описано выше, данные, модулированные MSK, записывают вдоль вобулированной канавки. На фиг.13 изображена схема, представляющая формат адреса информации ADIP, записанной в соответствии с приведенным выше описанием.
На фиг.13 также показан способ коррекции ошибки в информации адреса ADIP.
Собственно информация адреса ADIP имеет размер 36 бит, к которым добавляют 24 бита проверки на четность.
Информация адреса ADIP, размер которой составляет 36 битов, включает 3 бита номера слоя (а именно, от бита 0 номера слоя до бита 2 номера слоя), которые используются для многослойной записи, 19 битов RUB (блоков модулей записи) (а именно, от бита 0 RUB до бита 18 RUB), 2 бита номера адреса (а именно, от бита 0 номера адреса до бита 1 номера адреса) и 12 вспомогательных битов данных. 2 бита номера адреса используются для идентификации 3 блоков адреса для 1 RUB. Вспомогательные данные включают идентификатор диска, содержащий записанные условия записи, такие как мощность лазера при записи/воспроизведении.
Блок ЕСС данных адреса представляет собой блок, состоящий всего из 60 бит (36 битов + 24 бита проверки на четность), описанных выше. Как показано на чертеже, 60 битов составляют 15 полубайт, а именно, от полубайта 0 до полубайта 14, где полубайт состоит из 4 битов.
В качестве техники коррекции ошибки используют технику кодирования Рида-Соломона RS (15, 9, 7), основанную на полубайте.
В соответствии с этой техникой, 4 бита обрабатываются как символ. Обозначения (15, 9, 7) означают длину кода 15 полубайтов, размер данных 9 полубайтов и расстояние кода 6 полубайтов.
5. Предварительно записанная информация (Информация времени поставки)
На фиг.14А - 14К изображена пояснительная схема, представляющая способ модуляции предварительно записанной информации (или информации времени поставки), предназначенной для формирования канавки качания в зоне предварительно записанных данных.
В качестве техники модуляции используется техника двухфазной модуляции, такая как техника модуляции с FM кодом.
На фиг.14А показаны биты данных и на фиг.14В показан сигнал синхронизации канала. На фиг.14С показаны коды FM и на фиг.14D показаны формы качания.
Один бит данных составляет 2ch (2 импульса синхронизации канала). Код FM для бита данных "1" представлен частотой, составляющей 1/2 частоты блока канала.
Код FM для бита данных "0" представлен частотой 1/2 частоты кода FM для бита данных "1".
Форма вобуляции, записанная в виде вобулированной канавки, может быть прямоугольной формой, непосредственно представляющей код ЕМ. В качестве альтернативы форма вобуляции, записанная в виде вобулированной канавки, может представлять собой синусоидальную форму, показанную на фиг.14D.
Следует отметить, что полярности структуры кода FM и формы вобуляции, которые показаны на фиг.14С и 14D, соответственно, могут быть инвертированы, в результате чего получаются структуры, показанные на фиг.14Е и 14F, соответственно.
Предположим, что правила модуляции кода FM, описанные выше, будут применены к потоку битов данных "10110010", который показан на фиг.14G. В этом случае в результате модуляции получается форма кода FM и форма колебаний (синусоидальной формы), которые показаны на фиг.14Н и 14I, соответственно.
Следует отметить, что модуляция может также привести к получению формы колебаний в виде кода FM и колебаний синусоидальной формы, которые показаны на фиг.14J и 14К, соответственно, при инвертировании полярности структуры кода FM и формы качания, показанных на фиг.14Н и 14I, соответственно.
Структура блока ЕСС информации времени поставки описана со ссылкой на фиг.15. Блок данных ЕСС информации времени поставки физически содержит приблизительно два сектора. С точки зрения содержания, блок данных содержит подблок собственно информации времени поставки (или предварительно записанных данных) и подблок данных управления, связанных с собственно информацией времени поставки (предварительно записанных данных управления).
Как показано на фиг.15, подблок предварительно записанных данных содержит два модуля, каждый из которых занимает сектор, имеющий размер 2 килобайта. Два модуля формируют подблок, имеющий размер 4 килобайта (=2048 байт/сектор × 2 сектора).
4 байта EDC (кода обнаружения ошибки) добавляют в каждый сектор для формирования модуля фрейма данных. 2 модуля фрейма данных формируют фрейм данных, имеющий размер 2052 (=2048+4) байта/модуль фрейма данных ×2 модуля фрейма данных. Фрейм данных дополнительно скремблируют для получения скремблированного фрейма данных.
Затем скремблированный фрейм данных подвергают процессу кодирования Рида-Соломона для генерировании блока данных, состоящего из 216 рядов и 19 колонок. 32 ряда проверки на четность дополнительно добавляют к блоку данных для генерирования подблока LDC (кода с большим расстоянием), состоящего из (216+32) рядов и 19 колонок.
Подблок LDC представляет собой блок RS (248, 216, 33)×19.
Затем кластер LDC, состоящий из 248 рядов × 19 колонок (19 байт), формируют из подблоков LDC.
На фиг.16А и 16В показаны схемы, представляющие процесс кодирования подблока предварительно записанных данных в подблок LDC.
4 Кбайта, предварительно записанных данных, показанные на фиг.16А, подвергают процессу кодирования ЕСС для получения подблока LDC, который показан на фиг.16В. Более подробно, 4 байта EDC (код обнаружения ошибки) добавляют к каждому сектору длиной 2048 байт предварительно записываемых данных. Два сектора предварительно записываемых данных затем кодируют в подблок LDC. Как указано выше, подблок LDC представляет собой блок RS (248, 216, 33)×19. Блок RS (248, 216, 33)×19 представляет собой блок, который состоит из кода RS (Рида-Соломона) с длиной кода 248 полубайт, размером данных 216 полубайт и расстоянием кода 33 полубайта и имеет размер блока 19 кодовых слов.
С другой стороны, подблок предварительно записанных данных управления имеет размер 48 байт (=24 байта/модуль × 2 модуля), как показано на фиг.15. Номера модулей адреса, имеющие размер 72 байта (9 байт/адрес × 8 адресов), добавляют к подблокам предварительно записываемых данных управления для генерирования модуля кодирования с размером 120 байт (=48 байт + 72 байта).
120 байт подвергают процессу кодирования Рида-Соломона для получения блока доступа из 30 рядов на 4 колонки.
Затем 32 ряда проверки на четность добавляют для формирования подблока BIS (подкод, индицирующий пакет), подблок BIS представляет собой блок RS (62, 30, 33)×4. Затем из подблока BIS формируют кластер размером 248 рядов × 1 колонку (1 байт).
На фиг.16С и 16D показаны схемы, представляющие процесс кодирования предварительно записываемых данных управления и номер модуля адреса, который имеет общий размер 120 байт, в подблок BIS.
Таким образом, 120 байт данных, показанный на фиг.16С, подвергают процессу кодирования ЕСС для генерирования подблока BIS, который показан на фиг.16D. Как отмечено выше, подблок BIS представляет собой блок RS (62, 30, 33)×4. Блок RS (62, 30, 33)×4 представляет собой блок, который состоит из кода RS (Рида-Соломона) с длиной кода 62 полубайта, размером данных 30 полубайт и расстоянием кода 33 полубайта и имеют размер блока - четыре кодовых слова.
Как показано на фиг.15, кластеры LDC и BIS, каждый из которых состоит из 248 рядов, составляет фрейм данных. Фрейм данных кластера LDC содержит 19 байт, в то время как фрейм данных кластера BIS содержит 1 байт.
Таким образом, комбинированный фрейм данных содержит 20 байт (=19 байт + 1 байт). Как показано на чертеже, BIS, имеющий размер 1 байт, расположен в начале фрейма комбинированных данных. После BIS следует LDC с размером 19 байт. 248 рядов или 248 фреймов данных, каждый с размером 20 байт (=160 бит) составляет блок ЕСС.
Каждый из фреймов данных подвергают процессу двухфазной модуляции, в котором для генерирования фрейма записи добавляют фрейм синхронизации. Более подробно, фрейм синхронизации с размером 8 бит вводят в начало 20-байтных (160 битов) данных, получаемых в результате процесса двухфазной модуляции, для получения структуры, состоящей из 336 битов канала, которая представляет собой конечный результат процесса двухфазной модуляции.
Следует отметить, что, поскольку в случае двухфазной модуляции отсутствует компонент DC, нет необходимости добавлять биты DCC к фрейму данных.
Такие фреймы записи составляют структуру данных, которую записывают на дорожку в виде качания канавки в зоне РВ на диске.
Более подробно, предварительно записанную информацию, используемую в качестве информации времени поставки, записывают в зону РВ, которая представляет собой область между окружностью с радиусом 22,3 мм и окружностью с радиусом 23,1 мм в случае диска с диаметром 12 см, как описано выше, со ссылкой на фиг.2.
Для учета простого условия, требующего, чтобы блок данных информации времени поставки был записан в описанном выше формате в область зоны РВ, не выходя за пределы окружности на диске, плотность записи битов канала может быть меньше приблизительно 1,72 мкм.
Таким образом, плотность записи битов канала может быть уменьшена до величины приблизительно 1/28 плотности записи данных пользователя, получаемой в результате модуляции с использованием техники RLL (1,7) PP. В результате может быть улучшено отношение сигнал/шум сигнала, представляющего биты канала.
Поскольку BIS представляет собой код, имеющий чрезвычайно хорошую мощность коррекции ошибки по сравнению с LDC, практически все ошибки исправляются. Таким образом, символы, служащие в качестве указателей ошибки, получаемых из BIS, содержащих ошибки, могут использоваться следующим образом.
В процессе декодирования с использованием ЕСС, сначала производят декодирование BIS. Предположим, что в последовательных BIS обнаружены две ошибки. В этом случае эти две ошибки рассматриваются как ошибки пакета данных размером 19 байтов, расположенных между последовательными BIS. Указатели ошибки, каждый из которых указывает на одну из ошибок, добавляют к данным размером 19 байт. Затем выполняют процесс коррекции стирания указателя на основе LDC с использованием этих указателей ошибки.
Таким образом, увеличивают степень коррекции ошибки по сравнению со степенью коррекции ошибок с использованием только LDC.
BIS включает, среди прочих данных, информацию адреса. В зоне предварительно записанных данных предварительно записываемая информация записывается в форме вобулирования канавки. Таким образом, поскольку форма вобуляции канавки не выражает информацию адреса, информация адреса, включенная в BIS, может использоваться при осуществлении доступа.
Как очевидно следует из фиг.15 (или фиг.16А - 16D) и фиг.4 (или фиг.5А - 5D), в формате ЕСС данных пользователя, записанных в виде отметок с изменением фазы, используются те же коды, что и в формате ЕСС информации времени поставки.
Тот факт, что в форматах ЕСС используются одинаковые коды, подразумевает, что процесс декодирования ЕСС информации времени поставки (или предварительно записанной информации) может осуществляться с помощью схемы, предназначенной для процесса декодирования ЕСС при воспроизведении данных пользователя, записанных в виде меток с изменением фазы, и также означают, что конфигурация аппаратных средств устройства привода диска может быть выполнена более эффективной.
На фиг.17 показана пояснительная схема, представляющая структуру кластера, содержащего фреймы данных.
Каждый ряд, показанный на фигуре, соответствует фрейму данных с размером 20 байт, как описано выше. Как поясняется выше, каждый фрейм данных модулируют для получения фрейма записи с размером 336 битов канала. 248 рядов, или 248 фреймов составляют блок ЕСС. К блоку ЕСС добавляют входной фрейм входа и фрейм выхода до и после 248 фреймов для формирования вышеуказанного кластера размером 250 фреймов. Фрейм входа и фрейм выхода используют в качестве соединительных фреймов.
Кроме того, как описано выше, 8 адресов добавляют в качестве номера модуля адреса. Часть LDC кластера, исключая фрейм входа и фрейм выхода, содержит 248 фреймов, которые разделены на восемь групп, каждая из которых содержит 31 фрейм, а именно, от фрейма 0 до фрейма 30. 8 адресов, а именно, адреса, имеющие номера модулей от 0 до 7, назначают восьми группам: каждой группе по одному адресу.
Следует отметить, что структура кластера предварительно записанных данных, показанная на фиг.17, является типичной структурой кластера, получаемой путем добавления соединительных фреймов, в соответствии со структурой кластера данных пользователя. Структура кластера предварительно записанных данных, соответствующая структуре кластера данных пользователя, используется для построения конфигурации цепи системы обработки декодирования в устройстве привода диска.
Однако не всегда требуется строить структуру кластера предварительно записанных данных (или информацию времени поставки) в соответствии со структурой кластера данных пользователя, если несоответствие не будет создавать какую-либо проблему.
То есть, поскольку информация времени поставки представляет собой информацию, предназначенную только для воспроизведения, которую никогда не перезаписывают, в ней не требуется использовать соединительные фреймы. Таким образом, при исключении соединительных фреймов, также может использоваться кластер, содержащий только 248 фреймов, как показано на фиг.18.
Ниже приведено описание, поясняющее обработку преобразования последовательности данных, такую как процесс чередования, осуществляемый в отношении подблоков LDC и BIS со ссылкой на фиг.19-26.
На фиг.19-21 показаны пояснительные схемы, используемые для описания обработки преобразования, осуществляемой в отношении подблока LDC.
С другой стороны, на фиг.22А-25 показаны пояснительные схемы, используемые для описания обработки преобразования, осуществляемой в отношении подблока BIS. На фиг.26 изображена пояснительная схема, используемая для описания обработки преобразования, которая осуществляется, когда подблоки LDC и BIS записывают на диск.
На фиг.19 показана пояснительная схема, используемая для описания процесса преобразования предварительно записываемых данных С(g, h), используемых в качестве собственно информации времени поставки, в данные D (i, j), записанные в память, где индекс g находится в диапазоне 0≤g<2 и обозначает номер модуля, и индекс h находится в диапазоне 0≤g<2052 и обозначает номер предварительно записываемых данных. Обработка преобразования осуществляется на основе уравнений преобразования с использованием номера g модуля и номера h предварительно записанных данных следующим образом:
i=(g×2052+h) % 216
j=(g×2052+h)/216
где символ "/" обозначает оператор деления для получения частного j, и символ "%" обозначает оператор деления для получения остатка i деления.
Коды от С(g, 2048) до С(g, 2051) представляют собой EDC (коды обнаружения ошибки) для кодов от С (g, 0) до С (g, 2047).
Предварительно записанные данные размером (2052×2) байта, включая EDC, как показано на фиг.15, преобразуются в данные D (i, j), загруженные в память, как показано на фиг.19, где 0≤i≤215 и 0≤j≤18. Обозначения "0, 0" до 1, 2051", показанные на фиг.19, обозначают предварительно записанные данные С (g, h).
На фиг.20 показана схема, представляющая коды предварительно записываемых данных, содержащихся в памяти D (i, j), как описано выше, где индекс i представляет собой номер кода и индекс j представляет номер байта.
Заштрихованный участок, соответствующий значениям индекса i в диапазоне 216≤i≤247, представляет 32 добавленных ряда проверки на четность.
На фиг.21 показана схема, представляющая положения b(s, t, u), полученные в результате процесса преобразования, осуществляющегося в отношении данных D(i, j), содержащихся в памяти, таких как показаны на фиг.20, где индекс s представляет собой AUN (Номер модуля адреса), индекс t представляет номер фрейма, и индекс u представляет номер байта.
Процесс преобразования осуществляется на основе уравнений преобразования с использованием номера s адреса модуля, номера t фрейма и номера u байта в следующем виде:
i=(s×31+t)
j=(s×31+t+u-1) % 19,
где 0≤s <8, 0 ≤ t <31 и 1 ≤ u <20.
На фиг.22-25 представлены пояснительные схемы, используемые для описания обработки преобразования, осуществляющейся в отношении предварительно записанных данных, используемых как информация дополнения и управления для информации времени поставки.
На фиг.22 показана пояснительная схема, представляющая информацию, включенную в подблок BIS.
Как описано выше, информация BIS содержит информацию адреса и предварительно записанные данные управления.
Информация адреса в информации BIS показана на фиг.22А. Как показано на чертеже, адрес в одном блоке ЕСС содержит восемь полей адреса, а именно, от поля адреса №0 до поля адреса №7. Каждое из полей адреса содержит 9 байт. Например, поле адреса №0 содержит 9 байт, а именно, от байта 0-0 до байта 0-8.
4 байта MSB (байты старших разрядов) каждого поля адреса используются для записи значения адреса, представляющего адрес блока ЕСС, который называется AUN (номер модуля адреса).
3 бита LSB (биты младших разрядов) 5-го байта в каждом поле адреса используют для записи номера поля адреса.
Получаемые в результате 4 LSB (байта младших разрядов) каждого поля адреса используют для записи битов проверки на четность для поля адреса.
С другой стороны, предварительно записанные данные управления в информации BIS показаны на фиг.22В. Как показано на чертеже, предварительно записанные данные управления в одном блоке ЕСС содержат 2 модуля, а именно, от модуля №0 до модуля №1, каждый из которых состоит из 24 байт. Например, модуль №0 состоит из 24 байт, а именно, от байта 0-0 до байта 0-23.
Эти предварительно записываемые данные управления зарезервированы для использования в будущем.
На фиг.23 показана пояснительная схема, используемая для описания обработки по преобразованию информации адреса подблока BIS I(s, v) и предварительно записанных данных управления U(g, h) в данные B(i, j) памяти.
В информации I(s, v) адреса индекс s представляет собой AUN (номер модуля адреса) в диапазоне от №0 до №7, и индекс v представляет собой номер адреса, то есть, номер байта в диапазоне от 0 до 8.
В предварительно записанных данных U(g, h) управления, с другой стороны, индекс g представляет собой номер модуля в диапазоне от №0 до №1, и индекс h представляет собой номер данных, то есть, номер байта в диапазоне от 0 до 23.
Обработка преобразования для информации адреса осуществляется на основе уравнений преобразования с использованием номера модуля адреса s и номера v байта следующим образом:
i=((s×31+v) % 31)×2+((s×31+v)/124)
=(v % 31)×2+(s/4)
j=(s×31+v) % 4
где 0≤s<8 и 0≤v<9. Информацию адреса загружают в память с чередованием в диапазоне 18 рядов, то есть, в диапазоне 0≤i≤17.
В качестве предварительно записанных данных управления, обработка преобразования осуществляется на основе уравнений преобразования с использованием номера g модуля и номера h байта следующим образом:
i-(g×24+h) % 12+18
j=(g×24+h)/12
где 0≤g <2 и 0≤h<24. Предварительно записанные данные управления загружают в память в диапазоне 12 рядов, то есть в диапазоне 18≤i≤29.
На фиг.24 показана схема, изображающая информацию адреса и предварительно записанные данные управления, которые загружены в память, как описано выше, в отношении данных в памяти B(i, j), где индексы i и j представляют собой номер кода и номер байта, соответственно.
Заштрихованная часть, соответствующая значению индекса i в диапазоне 30≤i≤61, представляет 32 добавленных ряда проверки на четность.
На фиг.25 показана схема, представляющая обработку для преобразования данных, содержащихся в памяти B(i, j), аналогично показанным на фиг.24 в положениях b(s, t, u) на диске, где индексы s, t и u представляют собой AUN (номер модуля адреса), номер фрейма и номер байта, соответственно.
Обработка преобразования осуществляется на основе уравнений преобразования с использованием номера s модуля адреса, номера t фрейма и номера u байта, установленного в 0, следующим образом:
i=((s×31+t) % 31)×2+((s×31+t)/124)
=(t % 31)×2+(s/4)
j=(s×31+t) % 4, где 0≤s<8, 0≤t<3l и u=0.
Данные в положениях b(s, t, u), которые показаны на фиг.21 и представляют результаты обработки для преобразования подблока LDC, и данные в положениях b(с, t, u), показанные на фиг.25, представляющие результаты обработки для преобразования подблока BIS, совместно формируют фреймы, записанные на диск, как показано на фиг.26.
Следует отметить, что правила преобразования обработки данных для преобразования информации времени поставки также используются для данных пользователя.
Таким образом, вышеприведенное описание поясняет типичный случай информации времени поставки, в которой блок ЕСС состоит из модулей по 4 килобайта, предварительно записанных данных. Однако также может использоваться блок ЕСС, состоящий из модулей по 8 килобайт предварительно записанных данных.
Структура блока ЕСС, состоящего из модулей по 8 килобайт предварительно записанных данных, поясняется со ссылкой на фиг.27.
В данном случае блок данных ЕСС информации времени поставки физически содержит приблизительно четыре сектора.
Таким образом, подблок предварительно записанных данных включает четыре фрейма, каждый из которых занимает сектор с размером 2 килобайта. Четыре фрейма формируют подблок, имеющий размер 8 килобайт (=2048 байт/сектор × 4 сектора).
Код EDC (код обнаружения ошибки) размером 4 байта добавляют в каждый сектор для формирования модуля фрейма данных. 4 модуля фрейма данных формируют фрейм данных с размером 2052 (=2048+4) байта/модуль фрейма данных × 4 модуля фрейма данных. Фрейм данных дополнительно скремблируют для получения скремблированного фрейма данных.
Затем скремблированный фрейм данных подвергают процессу кодирования Рида-Соломона для генерирования блока данных, состоящего из 216 рядов и 38 колонок. 32 ряда проверки на четность дополнительно добавляют к блоку данных для генерирования подблока LDC (кода с большим расстоянием), состоящего из (216+32) ряда и 38 колонок.
Подблок LDC представляет собой блок RS (248, 216, 33)×38, который состоит из кода RS (Рида-Соломона) с длиной кода 248 полубайт, размером данных 216 полубайт и расстоянием кода 33 полубайта и имеет размер блока 38 кодовых слов.
Затем из подблока LDC формируют кластер LDC из 496 рядов × 19 колонок (19 байт).
С другой стороны, подблок предварительно записанных данных управления имеет размер 96 байт (=24 байта/модуль × 4 модуля). Номера блоков адреса с размером 144 байта (9 байт/адрес × 16 адресов) добавляют к подблоку предварительно записываемых данных управления для генерирования модуля кодирования с размером 240 байт (=96 байт + 144 байта).
240 байт подвергают процессу кодирования Рида-Соломона для получения блока доступа размером 30 рядов × 8 колонок.
Затем 32 ряда проверки на четность добавляют для формирования подблока BIS (подкода, индицирующего пакет). Количество кодовых слов равно 8. Подблок BIS представляет собой блок RS (62, 30, 33) × 8, который состоит из кода RS (Рида-Соломона) с длиной кода 62 полубайта, размером данных 30 полубайт и расстоянием кода 33 полубайта и имеет размер блока восемь кодовых слов. Затем кластер BIS из 496 рядов × 1 колонку (1 байт) формируют из подблока BIS.
Каждый кластер LDC и BIS содержит 498 рядов, каждый из которых составляет фрейм данных. Фрейм данных кластера LDC содержит 19 байт, в то время как фрейм данных кластера BIS содержит 1 байт.
Таким образом, комбинированный фрейм данных содержит 20 байт (19 байт + 1 байт). Как показано на чертеже, BIS, имеющий размеры 1 байт, помещен в начало фрейма комбинированных данных. После BIS следует LDC с размером 19 байт. Каждый из 496 рядов или 496 фреймов данных, имеющий размера 20 байт, составляет 1 блок ЕСС.
Каждый из фреймов данных подвергают процессу двухфазной модуляции, в которой синхронизацию фрейма добавляют для генерирования фрейма записи. Более подробно, синхронизацию фрейма с размером 8 бит вводят в начало данных размером 20 байт (160 бит), полученных в результате процесса двухфазной модуляции, для получения структуры, состоящей из 336 битов канала в виде конечного результата процесса двухфазной модуляции.
Следует отметить, что, поскольку в случае двухфазной модуляции отсутствует компонент DC, нет необходимости добавлять биты DCC в фрейм данных.
Такие фреймы записи составляют структуру данных, предназначенных для записи в виде вобуляции канавки на дорожку в зоне РВ диска.
Более подробно, предварительно записанную информацию, используемую в качестве информации времени поставки, записывают в зону РВ, которая представляет собой область между окружностью с радиусом 22,3 мм и окружностью с радиусом 23,1 мм в случае диска с диаметром 12 см, как описано выше со ссылкой на фиг.2.
При учете простого условия, требующего, чтобы блок данных информации времени поставки был записан в формате, описанном выше, в область зоны РВ так, чтобы он не выходил за пределы окружности на диске, плотность записи битов канала может быть меньше, чем приблизительно 0,86 мкм. То есть, плотность записи битов канала может быть уменьшена до величины приблизительно 1/14 плотности записи данных пользователя, полученных в результате модуляции с использованием техники RLL (1,7) PP. В результате отношение сигнал/шум сигнала, представляющего биты канала, может быть улучшено.
Кроме того, в этом случае также для формата ЕСС данных пользователя, записанных в виде меток изменения фазы, используют те же коды, что и для формата ЕСС информации времени поставки.
На фиг.28 показана схема, изображающая структуру кластера, содержащего фреймы данных.
Каждый ряд, показанный на фигуре, соответствует фрейму данных с размером 20 байт, как описано выше. Как пояснялось ранее, каждый фрейм данных модулируют для получения фрейма записи с размером 336 битов канала. 496 рядов или 496 фреймов составляют блок ЕСС. Фрейм входа и фрейм выхода добавляют к блоку ЕСС, соответственно, перед и после 496 фреймов для формирования вышеуказанного кластера, содержащего 498 фреймов. Фрейм входа и фрейм выхода используются в качестве соединительных фреймов.
Кроме того, как описано выше, 16 адресов добавляют в качестве номера модуля адреса. Часть LDC кластера, исключая фрейм входа и фрейм выхода, содержит 496 фреймов, которые разделены на 16 групп, каждая из которых содержит 31 фрейм, а именно, от фрейма 0 до фрейма 30. 16 адресов, а именно, адреса с номерами модулей от 0 до 15, назначают 16 группам по принципу один адрес на одну группу.
Следует отметить, что структура кластера предварительно записанных данных, показанная на фиг.28, является типичной структурой кластера, получаемой путем добавления соединительных фреймов в соответствии со структурой кластера данных пользователя. Структура кластера предварительно записанных данных, соответствующая структуре кластера данных пользователя, пригодна для построения цепи системы декодирования, используемой в устройстве привода диска.
Однако не всегда требуется строить конструкцию структуры кластера предварительно записанных данных (или информации времени поставки) в соответствии со структурой кластера данных пользователя, если несоответствие не создает какие-либо проблемы.
То есть, поскольку информация времени поставки представляет собой информацию, предназначенную только для воспроизведения, которая никогда не перезаписывается, в ней не требуются использовать соединительные фреймы. Таким образом, при исключении соединительных фреймов также может использоваться кластер, содержащий только 496 фреймов, как показано на фиг.29.
На фиг.30 и 31 изображены пояснительные схемы, представляющие синхронизации фреймов, состоящие из блоков ЕСС размером 4 Кбайта или 8 Кбайт информации времени поставки.
Как показано на фиг.30, существует семь типов синхронизации фрейма FS, а именно, от FS0 до FS6. Каждая из синхронизации FS0 - FS6 фрейма представляет собой структуру, не соответствующую правилам модуляции FM кода. Структура состоит из 16 битов канала. Восемь из 16 битов канала представляют собой "11001001", которые служат в качестве тела синхронизации. Остальные 8 битов канала формируют идентификатор синхронизации, идентифицирующий синхронизацию фрейма.
Если выразить в виде битов данных, например, идентификатор синхронизации, синхронизирующий фрейм FS0, имеет 3 бита "000" и 1 бит проверки на четность, который в данном случае устанавливается в 0. Эти 3 бита данных и бит проверки на четность подвергают процессу модуляции кода FM для получения в результате 8 битов канала "10101010".
8 битов канала для каждой другой синхронизации фрейма от FS1 до FS7 получают таким же образом, что и синхронизацию фрейма FS0. То есть, 3 бита данных "000" и 1 бит проверки на четность каждой синхронизации фрейма подвергают процессу модуляции кода FM для получения в результате 8 битов канала для синхронизации фрейма.
Таким образом, расстояние кода битовых данных становится равным 2 полубайта или больше так, что ошибка в 1 бит не создает вероятность интерпретации идентификатора синхронизации как другого идентификатора синхронизации.
При записи синхронизации FS фрейма синхронизация FS фрейма перед записью подвергается преобразованию NRZI (без возвращения к нулю и с инверсией).
На фиг.31 показана схема, представляющая структуру синхронизации фрейма.
Как описано выше, в случае блока ЕСС, построенного как модуль из 4 Кбайт, один блок ЕСС, включающий 248 фреймов, делят на восемь групп, каждая из которых содержит 31 фрейм. В случае блока ЕСС, построенного как модули по 8 Кбайт, с другой стороны, один блок ЕСС, включающий 496 фреймов, делят на 16 групп, каждая из которых содержит 31 фрейм. В любом случае, один блок ЕСС делят на группы, каждая из которых содержит 31 фрейм.
Номера от 0 до 30 фреймов назначают, соответственно, по 31 фрейму в каждой группе. Для номера 0 фрейма используют FS0 в качестве специальной синхронизации фрейма, которая не используется для других номеров фрейма. Таким образом, синхронизация FS0 фрейма позволяет определять начало фрейма адреса и, следовательно, устанавливать синхронизацию адреса.
Синхронизации от FS1 до FS6 фреймов назначают номерам от 1 до 30 фреймов, как показано на фиг.31. Такое назначение синхронизации FS1 - FS6 фреймов позволяет определять начало фрейма адреса, даже если синхронизация FS0 фрейма не будет определена.
6. Устройство привода диска
В следующем ниже описании поясняется устройство привода диска, которое позволяет записывать данные на диск и воспроизводить данные с диска, описанного выше.
На фиг.32 показана блок-схема, изображающая конфигурацию устройства привода диска. Диск 100, показанный на фиг.32, представляет собой диск, сформированный в соответствии с вариантом воплощения, описанным выше.
Диск 100 установлен на платформе привода вращения, которая не показана на чертеже. При выполнении операции записи и воспроизведения, диск 100 приводится во вращение с помощью шпинделя двигателя 2, обеспечивающего работу с постоянной линейной скоростью (ПЛС).
Затем оптический блок 1 считывает информацию ADIP, записанную из зоны RW на диске 100 в виде вобуляции канавки дорожки. Кроме того, оптический блок 1 также считывает предварительно записанную информацию из зоны РВ диска 100 в виде вобуляции канавки дорожки.
При выполнении операции записи оптический блок 1 записывает данные пользователя в зону RW в виде меток с изменением фазы. С другой стороны, при выполнении операции воспроизведения, оптический блок 1 считывает записанные метки с изменением фазы.
Оптический блок 1 включает лазерный диод, фотодетектор, линзы объектива и оптическую систему, которая не показана на фигуре. Лазерный диод служит в качестве источника луча лазера. Фотодетектор производит детектирование отраженного луча. Линзы объектива служат в качестве выходного устройства лазерного луча. Оптическая система позволяет облучать лазерным лучом поверхность записи диска 100 через линзы объектива и направляет отраженный луч на фотодетектор.
Лазерный диод генерирует, так называемый, синий лазерный луч, имеющий длину волны 405 нм. Оптическая система имеет числовую апертуру 0,85.
Линзы объектива удерживаются в оптическом блоке 1 с помощью 2-осевого механизма таким образом, что линзы могут перемещаться в направлении отслеживания дорожки и в направлении фокусировки. Весь оптический блок 1 может перемещаться с помощью винтового механизма 3 в радиальном направлении диска 100. Питание лазерного диода, используемого в оптическом блоке 1, производится от сигнала управления, то есть, током управления, который поступает с выхода устройства 13 управления лазером для генерирования луча лазера.
Информация, передаваемая лучом, отражающимся от диска 100, определяется фотодетектором, который преобразует эту информацию в электрический сигнал и подает в виде выходного сигнала на схему 4 матрицы. Схема 4 матрицы включает схему преобразования тока в напряжение и схему преобразования матрицы/усиления. Схема преобразования тока в напряжение преобразует токи, поступающие от множества устройств приема света, каждое из которых служит в качестве средства фотодетектора, в напряжение. Схема преобразования матрицы/усиления осуществляет матричную обработку сигналов напряжения, поступивших из схемы преобразования тока в напряжение для генерирования требуемых сигналов, таких как высокочастотный сигнал (или сигнал воспроизводимых данных), сигнал ошибки фокусировки и сигнал ошибки отслеживания дорожки. Высокочастотный сигнал представляет воспроизводимые данные. Сигнал ошибки фокусировки и сигнал ошибки отслеживания дорожки используются для выполнения сервоуправления. Кроме того, схема преобразования матрицы/усиления также генерирует сигнал, представляющий форму качания канавки, то есть двухтактный сигнал, получаемый в результате детектирования формы качания канавки.
С выхода схемы 4 матрицы сигнал воспроизводимых данных поступает в схему 5 считывания/записи, сигнал ошибки фокусировки, а также сигнал ошибки отслеживания дорожки поступают на схему 11 сервоуправления, и двухтактный сигнал подается в схему 8 вобуляции.
Схема 5 считывания/записи осуществляет обработку сигналов воспроизводимых данных для воспроизведения данных, считываемых по отметкам с изменением фазы и выводит эти данные в схему 6 модуляции/демодуляции. Процесс включает обработку двоичного преобразования и обработку генерирования сигнала синхронизации воспроизведения на основе способа ФАПС.
Схема 6 модуляции/демодуляции включает функциональный элемент, служащий в качестве декодера при выполнении операции воспроизведения, и функциональный элемент, служащий в качестве кодирующего устройства при выполнении операции записи. При выполнении операции воспроизведения схема 6 модуляции/демодуляции осуществляет процесс демодуляции кодов с ограничением длины поля на основе сигнала синхронизации воспроизведения, осуществляя процесс декодирования.
Устройство 7 кодирования/декодирования ЕСС осуществляет процесс кодирования ЕСС, добавляя коды коррекции ошибок к данным, предназначенным для записи, при выполнении операции записи. С другой стороны, при выполнении операции воспроизведения, устройство 7 кодирования/декодирования ЕСС осуществляет процесс декодирования ЕСС для исправления ошибок воспроизводимых данных. Более подробно, при операции воспроизведения данные, демодулированные схемой 6 модуляции/демодуляции, записываются во внутреннем запоминающем устройстве. Данные, записанные во внутреннем запоминающем устройстве, затем подвергают процессам обработки таким, как обработка обнаружения/коррекции ошибок и обработка, исключения чередования, для генерирования воспроизводимых данных.
Воспроизводимые данные, после процесса декодирования ЕСС, осуществляемого с помощью устройства 7 кодирования/декодирования ЕСС, наконец, считываются с последующим переносом в систему 20 AV (аудио-визуальную систему) по команде системного контроллера 10.
Двухтактный сигнал, поступающий со схемы 4 матрицы, в виде сигнала, представляющего форму вобуляции канавки, обрабатывают в схеме 8 вобуляции. Более конкретно, в схеме 8 вобуляции двухтактный сигнал, несущий информацию ADIP, подвергают процессу демодуляции MSK для генерирования потока данных, составляющих в результате демодуляции адрес ADIP. Поток данных передают в декодер 9 адреса.
Декодер 9 адреса производит декодирование принятого потока данных, получая, таким образом, значение адреса, и передает его в системный контроллер 10.
Схема 8 вобуляции также осуществляет процесс генерирования сигнала тактовой частоты на основе техники ФАПС с использованием двухтактного сигнала, представляющего форму вобуляции канавки для генерирования сигнала тактовой частоты. Например, генерируемый сигнал тактовой частоты представляет собой сигнал тактовой частоты, передаваемый в множество компонентов, используемых при операции записи.
Двухтактный сигнал, выводимый со схемы 4 матрицы, в схему 8 вобуляции в виде сигнала, представляющего форму вобуляции канавки, представляет собой двухтактный сигнал, несущий предварительно записанную информацию, считываемую из зоны РВ. В схеме 8 вобуляции такой двухтактный сигнал подвергают процессу полосовой фильтрации и процессу демодуляции кода FM перед подачей в схему 5 считывания/записи в виде потока кода FM. В схеме 5 считывания/записи поток кода FM подвергают процессу изменения формы перед подачей в устройство 7 кодирования/декодирования ЕСС, в котором осуществляются процессы декодирования ЕСС и процесс исключения чередования, для выделения предварительно записанной информации (то есть, информации времени поставки). Выделенную информацию времени поставки, в конце концов, передают в системный контроллер 10.
Системный контроллер 10 осуществляет обработку такую, как различные установки, и обеспечивает защиту авторских прав на основе считанной предварительно записанной информации.
Системный контроллер 10 также выводит управляющий сигнал СТ в схему 8 вобуляции. Управляющий сигнал СТ управляет схемой 8 вобуляции, переключая обработку с процесса демодуляции информации ADIP на процесс демодуляции информации времени поставки и наоборот.
На фиг.33 показана блок-схема, представляющая типичную конфигурацию схемы 8 вобуляции.
Двухтактный сигнал РР, принятый из схемы 4 матрицы, передается в блок 64 ФАПС через полосовой фильтр 61. Как правило, блок 64 ФАПС осуществляет процесс двоичного преобразования в отношении компонента несущей двухтактного сигнала РР, проходящего через полосовой фильтр 61, перед обработкой ФАПС для получения сигнала CLK тактовой частоты на основе формы вобуляции канавки. Как указано выше, двухтактный сигнал РР представляет форму вобуляции канавки.
Однако, как указано выше со ссылкой на фиг.3, период вобуляции зоны RW составляет 69Т, в то время как период вобуляции зоны РВ составляет 36Т. То есть, частота несущей вобуляции зоны RW отличается от частоты несущей зоны РВ.
По этой причине системный контроллер 10 вырабатывает управляющий сигнал СТ для переключения полосового фильтра 61 с полосы пропускания, предназначенной для работы при записи или воспроизведении данных в зоне RW, или на полосу пропускания, предназначенную для работы при воспроизведении данных из зоны РВ, или наоборот.
В результате блок 64 ФАПС генерирует сигнал CLK тактовой частоты с частотой, соответствующей периоду вобуляции 69Т при записи или воспроизведении данных в зоне RW, или с частотой, соответствующей периоду вобуляции 36Т, при воспроизведении данных из зоны РВ.
Двухтактный сигнал РР, принятый из схемы 4 матрицы, также поступает в полосовой фильтр 62 для выделения компонента, имеющего частоту несущей, и компонента, имеющего частоту в 1,5 раз больше частоты несущей. Эти компоненты поступают в демодулятор 65 MSK. Демодулятор 65 MSK осуществляет обработку демодуляции MSK, выполняя, помимо прочих процессов, процесс умножения сигнала модулированного MSK на компонент несущей и процесс фильтрации. В результате обработки демодуляции MSK с выхода демодулятора 65 MSK получают модулированные данные, несущие информацию адреса ADIP, которые поступают в декодер 9 адреса, который производит декодирование данных для получения значения адреса ADIP. Следует отметить, что обработка демодуляции MSK основана на сигнале CLK тактовой частоты, имеющего частоту, соответствующую периоду вобуляции 69Т.
Двухтактный сигнал РР, принятый из схемы 4 матрицы, также поступает в полосовой фильтр 63 для выделения компонента сигнала с двухтактной модуляцией (FM модулированного), который поступает в демодулятор 66 FM кода, который затем производит демодуляцию компонента сигнала. Полученный в результате сигнал демодуляции поступает в схему 5 считывания/записи. Следует отметить, что обработка демодуляции MSK основана на сигнале CLK тактовой частоты, с частотой, соответствующей периоду вобуляции 36Т.
Как описано выше, с выхода системного контроллера 10 сигнал СТ управления поступает на схему 8 вобуляции, имеющую такую конфигурацию, которая производит управление работой для переключения сигнала CLK тактовой частоты с частоты, соответствующей периоду вобуляции 36Т, на частоту, соответствующую периоду вобуляции 69Т, и наоборот. То есть, при воспроизведении данных из зоны РВ с диска 100, демодулятор 66 кода FM управляется таким образом, что он осуществляет процесс демодуляции для воспроизведения информации времени поставки. С другой стороны, для воспроизведения данных из зоны RW диска 100, демодулятор 65 MSK управляется таким образом, чтобы он осуществлял процесс демодуляции для воспроизведения адреса ADIP.
При выполнении операции записи устройством привода диска, которое показано на фиг.32, данные, предназначенные для записи, поступают из системы 20 AV. Данные, предназначенные для записи, записываются в буфер, сформированный в устройстве 7 кодирования/декодирования ЕСС.
Устройство 7 кодирования/декодирования ЕСС производит кодирование данных буфера, которые предназначены для записи, путем выполнения обработки, включающей процесс добавления кодов коррекции ошибки, процесс чередования и процесс добавления подкодов. То есть, устройство 7 кодирования/декодирования ЕСС осуществляет процесс кодирования для генерирования блока ЕСС, который был описан выше со ссылкой на фиг.4.
Затем данные после обработки кодирования ЕСС подвергают процессу модуляции с использованием техники RLL (1, 7) РР в схеме 6 модуляции/демодуляции перед подачей их в схему 5 считывания/записи.
Кодирующий сигнал тактовой частоты, который служит в качестве опорного сигнала тактовой частоты в этом процессе кодирования, осуществляемом при операции записи, представляет собой сигнал тактовой частоты, генерируемый из двухтактного сигнала, представляющего форму вобуляции канавки, как описано выше.
В схеме 5 считывания/записи результат процесса кодирования, представляющий данные, предназначенные для записи, подвергают обработке компенсации повторного кодирования, включая процесс точной регулировки мощности записи до оптимального значения, которое является характерным для слоя записи диска 100, формы пятна луча лазера, линейной скорости при записи и подобным параметрам, и процессу регулировки формы вобуляции импульсов, управляющих лазером. Затем данные, предназначенные для кодирования, поступают в привод 13 лазера в виде импульсов управления лазером.
Привод 13 лазера передает импульсы управления лазером на лазерный диод, используемый в оптическом блоке 1 для управления диодом и генерирования луча лазера. В результате, на диске 100 создаются углубления - питы (или отметки с изменением фазы), представляющие записанные данные.
Следует отметить, что привод 13 лазера содержит так называемую схему АУМ (автоматического управления мощности) для управления выходной мощностью лазера для поддержания ее на постоянном уровне, независимо от окружающей температуры и других факторов, путем отслеживания выходной мощности лазера по выходному сигналу, генерируемому детектором отслеживания мощности лазера, который установлен в оптическом блоке 1. Более подробно, схема АУМ регулирует выходную мощность лазера до целевого значения, установленного для операции записи или воспроизведения. Целевые значения выходной мощности лазера для операций записи и воспроизведения устанавливаются в системном контроллере 10.
Схема 11 сервоуправления генерирует множество сигналов сервоуправления, таких как отслеживание фокусировки, отслеживание дорожки и сигналы шага резьбы на основе сигнала ошибки фокусировки и сигнала ошибки отслеживания дорожки, которые поступают из схемы 4 матрицы при выполнении операции сервоуправления.
Более подробно, схема 11 сервоуправления генерирует сигнал управления фокусом и сигнал управления отслеживанием дорожки в соответствии с сигналом ошибки фокусировки и сигналом ошибки отслеживания дорожки для управления соответственно катушкой фокусировки и катушкой отслеживания дорожки, которые используются в двухосевом механизме оптического блока 1. Таким образом, оптический блок 1, схема 4 матрицы, схема 11 сервоуправления и двухосевой механизм формируют петлю сервоуправления отслеживания дорожки и петлю сервоуправления фокусировкой.
Кроме того, схема 11 сервоуправления выключает петлю сервоуправления отслеживания дорожки и формирует сигнал управления переходом для осуществления операции перехода дорожки в соответствии с командой перехода дорожки, получаемой из системного контроллера 10.
Кроме того, схема 11 сервоуправления генерирует сигнал привода шага винта на основе сигнала ошибки шага винта, получаемого в виде низкочастотного компонента сигнала ошибки отслеживания дорожки и сигнала управления осуществления доступа, принимаемого из системного контроллера 10. Сигнал привода шага винта осуществляет управление винтовым механизмом 3. Винтовой механизм 3 представляет собой механизм, содержащий основной вал, на котором установлен оптический блок 1, винтовой двигатель и передачу, которые не показаны на чертеже. Винтовой двигатель управляется в соответствии с сигналом привода шага винта для поступательного перемещения оптического блока 1 на требуемое расстояние.
Схема 12 сервоуправления шпинделем осуществляет управление вращением двигателя 2 шпинделя для обеспечения условий ПЛС.
В качестве информации о текущей скорости вращения двигателя 2 шпинделя, схема 12 сервоуправления шпинделем принимает сигнал тактовой частоты, получаемый в результате работы ФАПС, осуществляемой в отношении сигнала, представляющего форму вобуляции канавки. Схема 12 сервоуправления шпинделем производит сравнение информации о текущем значении скорости вращения с информацией заранее заданного опорного значения ПЛС для генерирования сигнала ошибки шпинделя.
Кроме того, при работе в режиме воспроизведения данных сигнал тактовой частоты воспроизведения, генерируемый блоком ФАПС, который используется в схеме 5 считывания/записи (то есть, сигнал тактовой частоты, служащий в качестве опорного сигнала в процессе декодирования), используется в качестве информации о скорости вращения двигателя 2 шпинделя. При сравнении этой информации о скорости вращения с информацией об опорной скорости ПЛС, также может генерироваться сигнал ошибки вращения шпинделя.
Затем схема 12 сервоуправления шпинделем подает на выход сигнал привода шпинделя в соответствии с сигналом ошибки шпинделя для осуществления вращения двигателя 2 шпинделя в условиях ПЛС.
Кроме того, схема 12 сервоуправления шпинделем также может генерировать сигнал привода шпинделя в соответствии с сигналом управления ускорением/торможением шпинделя, принимаемым из системного контроллера 10 для осуществления таких операций, как включение, остановка, ускорение, замедление и других команд управления двигателем 2 шпинделя.
Различные операции, осуществляемые системой сервоуправления и системой записи/воспроизведения, как описано выше, управляются с помощью системного контроллера 10 на основе микрокомпьютера.
Системный контроллер 10 осуществляет различного рода обработку в соответствии с командами, поступающими из системы 20 AV.
Когда система 20 AV вырабатывает команду записи для записи данных, поступающую, например, в системный контроллер 10, системный контроллер 10 сначала передвигает оптический блок 1 в место положения адреса, в котором должны быть записаны данные. Затем устройство 7 кодирования/декодирования ЕСС и схема 6 демодуляции управляются таким образом, чтобы они осуществляли процесс кодирования данных, принятых из системы 20 AV. Примеры данных включают видео и аудио данные, в соответствии с одной из множества техник, таких, как техника MPEG2 (стандарт сжатия движущегося изображения и звука). Наконец, импульсы управления лазером, генерируемые схемой 5 считывания/записи, подают на схему управления 13 лазером для записи данных.
Кроме того, система 20 AV вырабатывает команду на считывание, поступающую на системный контроллер 10, осуществляя запрос на передачу определенных данных, таких, как видеоданные MPEG2, записанных на диск 100, например, в систему 20 AV, при этом операция поиска, прежде всего, управляется на основе адреса, указанного в команде считывания, установленного как цель, от которого должны передаваться данные. То есть, команда поиска, в которой указывается адрес, вырабатывается для схемы 11 сервоуправления для управления оптическим блоком 1 при осуществлении им доступа к цели, обозначенной адресом, указанной в команде поиска.
Затем выполняется управление работой по передаче данных из сегмента, указанного в команде считывания системы 20 AV. Более подробно, запрошенные данные считывают с диска 100, подвергают обработке такой, как декодирование и запись в буфер, которая осуществляется схемой 5 считывания/записи, схемой 6 демодуляции и устройством 7 кодирования/декодирования ЕСС, и передаются в систему 20 AV.
Следует отметить, что при работе в режимах записи и воспроизведения данных, записанных в виде отметок с изменением фазы на диск 100 и с него, системный контроллер 10 осуществляет управление работой записи и воспроизведения с использованием адреса ADIP, детектируемого схемой 8 вобуляции и декодером 9 адреса.
Кроме того, системный контроллер 10 вырабатывает команду, подаваемую на устройство 7 кодирования/декодирования ЕСС для осуществления процесса декодирования коррекции ошибки в отношении блока ЕСС, содержащего структуру, описанную выше со ссылкой на фиг.4.
Кроме того, в заранее определенные моменты времени, такие как момент установки диска 100 в устройство привода диска, системный контроллер 10 осуществляет управление для считывания информации времени поставки (то есть, предварительно записанной информации), записанной в виде качания канавки в зоне РВ на диске 100.
В этом случае прежде всего выполняется управление операцией поиска в зоне РВ, которая установлена в качестве целевой зоны. То есть, вырабатывается команда для схемы 11 сервоуправления на перемещение оптического блока 1 для осуществления доступа к самой внутренней окружности диска 100.
Затем производится управление оптическим блоком 1 таким образом, чтобы переместить его вдоль дорожки воспроизведения для получения двухтактного сигнала, представленного информацией отраженного луча. Наконец, схема 8 вобуляции, схема 5 считывания/записи и устройство 7 кодирования/декодирования ЕСС управляются таким образом, чтобы осуществлялись процессы декодирования для получения воспроизводимых данных в виде предварительно записанной информации.
Следует отметить, что системный контроллер 10 также вырабатывает команду на устройство 7 кодирования/декодирования ЕСС для осуществления процесса декодирования коррекции ошибки в блоке ЕСС, имеющем структуру, описанную выше, со ссылкой на фиг.15 или фиг.27.
Кроме того, системный контроллер 10 также осуществляет такие процессы, как обработка установки мощности лазера и обработка защиты от копирования на основе предварительно записанной информации, считываемой с диска 100, как описано выше.
Следует отметить, что при работе в режиме воспроизведения предварительно записанной информации из зоны РВ, системный контроллер 10 осуществляет управление доступом и воспроизведением, используя информацию адреса, включенную в кластер BIS, считываемый как предварительно записанная информация.
Следует отметить, что в типичной конфигурации, показанной на фиг.32, система 20 AV подключена к устройству 30 привода диска. Однако можно заметить, что устройство привода диска, в соответствии с настоящим изобретением, также может быть соединено с персональным компьютером или другим оборудованием.
Кроме того, устройство привода диска, в соответствии с настоящим изобретением, также может работать отдельно без соединения с каким-либо другим оборудованием. В этом случае устройство привода диска содержит блок управления и блок дисплея. Конфигурация элемента, служащего в качестве интерфейса для ввода и вывода данных, также при этом отличается от показанной на фиг.32. В случае такого автономного устройства привода диска обработка в режимах записи и воспроизведения осуществляется в соответствии с операциями, выполняемыми пользователем, и с использованием блока терминала, предназначенного для ввода и вывода различного рода данных, который также должен быть установлен. Нет необходимости отмечать, что существует множество возможных конфигураций, кроме типичной конфигурации. Например, возможны варианты воплощения устройства привода диска, в соответствии с настоящим изобретением, работающего в устройстве, предназначенном только для записи и в устройстве, предназначенном только для воспроизведения.
7. Способ изготовления диска
В описании, приведенном ниже, поясняется способ изготовления диска, в соответствии с настоящим изобретением.
Процессы производства диска разделяют на две большие категории, а именно, так называемый процесс изготовления мастер-диска и так называемый процесс тиражирования. Процесс изготовления мастер-диска представляет собой последовательность обработки, завершающуюся изготовлением металлического мастер-диска, который называется матрицей и который используют в процессе тиражирования копий. С другой стороны, процесс тиражирования представляет собой процесс с использованием полученной матрицы для массового производства оптических дисков в виде копий матрицы.
Более конкретно, в процессе изготовления мастер-диска используют фоторезистивный материал в качестве светочувствительной пленки на подложке из матового стекла. Затем осуществляют так называемый процесс нарезки для создания углублений и канавок с использованием техники экспонирования этой светочувствительной пленки лазерным лучом.
В случае использования такого варианта воплощения, процесс нарезки осуществляют для разметки канавки, имеющей вобулированную форму на основе предварительно записанной информации в части, соответствующей зоне РВ, на стороне самой внутренней окружности диска, и канавки, имеющей вобулированную форму на основе адресов ADIP в части, соответствующей зоне RW диска.
Заранее записанную информацию, которая должна быть записана в зоне РВ, подготавливают при обработке, называемой предварительным процессом изготовления мастер-диска.
После того, как процесс нарезки будет закончен, осуществляют заранее определенную обработку, такую как обработку проявлением. После обработки проявлением информацию переносят на металлическую поверхность стеклянной подложки с использованием способа электроплавления или подобного способа, для создания матрицы, которая позже потребуется при изготовлении дисков в виде копий матрицы.
В процессе тиражирования, который следует после процесса изготовления мастер-диска, производят конечный продукт в виде диска путем осуществления обработки, включающей этапы переноса информации на подложку из полимерной смолы с применением обычного способа литья под давлением, с использованием этой матрицы, в результате которого формируется отражательная пленка на подложке из полимерной смолы, и подложке из полимерной смолы придают требуемую форму диска.
Как показано на фиг.34, устройство нарезки, предназначенное для осуществления процесса нарезки, включает генератор 71 предварительно записанной информации, генератор 72 адреса, блок 73 переключения, блок 74 нарезки и контроллер 70.
Генератор 71 предварительно записанной информации выводит предварительно записанную информацию, подготовленную в процессе предварительной подготовки процесса изготовления мастер-диска. Генератор 72 адреса последовательно генерирует абсолютные адреса.
Блок 74 нарезки включает компоненты 82, 83 и 84 оптического блока, ротатор/конвейер 85 подложки, процессор 81 сигнала и датчик 86. Оптический блок, состоящий из компонентов 82, 83 и 84, излучает лазерный луч на стеклянную подложку 101, покрытую фоторезистивным материалом, для осуществления процесса нарезки. Ротатор/конвейер 85 подложки осуществляет вращение стеклянной подложки 101 и перемещает подложку 101 для переноса ее с места на место. Процессор 81 сигнала преобразует входные данные в данные, предназначенные для записи, и подает эти данные, предназначенные для записи, в оптический блок. Датчик 86 вырабатывает сигнал, поступающий в контроллер 70, индицирующий, установил ли ротатор/конвейер 85 подложку в требуемое местоположения для нарезки зоны РВ или зоны RW.
Компоненты 82, 83 и 84, используемые в оптическом блоке, представляют собой источник лазерного луча, модулятор и головку нарезки, соответственно. Источник 82 лазерного луча обычно представляет собой He-Cd источник света лазера, генерирующий лазерный луч. Лазерный луч, излучаемый источником 82 лазерного луча, модулируют с использованием модулятора 83 на основе данных, предназначенных для записи. Головка 84 нарезки производит фокусировку выходного луча, модулированного с помощью модулятора 83, и излучает сходящийся луч на поверхность фоторезистивного материала, расположенную на стеклянной подложке 101.
Модулятор 83 включает АОМ (акустический оптический модулятор) и AOD (акустический оптический отражатель). АОМ включает и выключает излучаемый луч с использованием источника 82 лазерного луча. AOD отражает луч, излучаемый источником 82 лазерного луча, в соответствии с сигналом генерирования вобуляции.
Ротатор/конвейер 85 подложки включает двигатель вращения, детектор FG скорости, двигатель перемещения и сервоконтроллер. Двигатель вращения осуществляет вращение стеклянной подложки 101. Детектор FG скорости определяет скорость вращения двигателя вращения. Двигатель перемещения перемещает стеклянную подложку 101 в радиальном направлении стеклянной подложки 101. Сервоконтроллер осуществляет управление, включая регулировку скорости вращения двигателя вращения, скорости вращения двигателя перемещения и отслеживание положения дорожки головки 84 нарезки.
Процессор 81 сигнала осуществляет обработку предварительно записанной информации и информации адреса, которые принимаются через блок 73 переключения. Обработка включает процесс форматирования для добавления таких данных, как коды коррекции ошибки в предварительно записанную информацию и информацию адреса для формирования отформатированных данных, и путем выполнения заранее определенного процесса в отношении форматированных данных для создания модулирующего сигнала, то есть, сигнала, представляющего предварительно записываемую информацию и информацию адреса.
Кроме того, сигнал 81 процессора также осуществляет обработку для привода АОМ (акустического оптического модулятора) и AOD (акустического оптического отражателя), которые используются в модуляторе 83, на основе сигнала модуляции, путем подачи сигнала в модулятор 83.
В ходе процесса нарезки в блоке 74 нарезки, ротатор/конвейер 85 подложки осуществляет вращение стеклянной подложки 101 с постоянной линейной скоростью и при вращении стеклянной подложки 101 перемещает стеклянную подложку 101 на расстояние, соответствующее заранее определенному шагу дорожки для формирования спиральной дорожки на поверхности стеклянной подложки 101.
В то же время луч лазера, излучаемый источником 82 луча лазера, модулируется с помощью модулятора 83 с получением модулированного сигнала на основе сигнала модуляции, принятого из процессора 81 сигнала, и модулированный сигнал излучается на поверхность фоторезистивного материала, расположенную на поверхности стеклянной подложки 101, с использованием головки 84 нарезки. В результате осуществляется нарезка фоторезистивного материала с использованием его светочувствительности для формирования канавки с формой вобуляции, представляющей модулирующий сигнал.
Контроллер 70 осуществляет управление операцией нарезки блока 74 нарезки при одновременном отслеживании сигнала, генерируемого датчиком 86, осуществляет управление генератором 71 предварительно записанной информации, генератором 72 адреса и блоком 73 переключения.
В начале процесса нарезки контроллер 70 производит запрос блока 74 нарезки для использования положения перемещения ротатора/конвейера 85 подложки в качестве исходного значения так, чтобы головка 84 нарезки начала излучение лазерного луча с самой внутренней окружности. Затем контроллер 70 осуществляет управление блоком 74 нарезки для начала работы, для привода стеклянной подложки 101 во вращение в условиях ПЛС и для выполнения работы по перемещению стеклянной подложки 101 на расстояние, соответствующее шагу дорожки 0,35 мкм для формирования канавки.
При этом осуществляется управление генератором 71 предварительно записанной информации таким образом, чтобы он генерировал предварительно записанную информацию, используемую в качестве информации времени поставки, и передавал эту информацию на процессор 81 сигнала через блок 73 переключения. Кроме того, источник 82 лазерного луча управляется таким образом, чтобы включить его в режим генерирования лазерного луча, в то время как модулятор 83 управляется таким образом, чтобы он модулировал лазерный луч на основе модулирующего сигнала, принимаемого из процессора 81 сигнала для осуществления процесса нарезки, для формирования канавки на стеклянной подложке 101. Модулирующий сигнал представляет собой модулирующий сигнал FM кода, представляющий предварительно записанную информацию. Таким образом, процесс нарезки осуществляется для формирования дорожки, такой как показана на фиг.3В, в области, которая предназначена для использования в качестве зоны РВ.
Когда сигнал, генерируемый датчиком 86, указывает, что процесс нарезки по формированию канавки достиг области, которая должна использоваться в качестве зоны RW, завершается создание канавки в области, которая предназначена для использования в качестве зоны РВ, контроллер 70 переключает блок 73 переключения из положения включения генератора 71 предварительно записанной информации в положение генератора 72 адреса, и осуществляет управление генератором 72 адреса для последовательного генерирования адресов.
Кроме того, ротатор/конвейер 85 подложки управляется таким образом, чтобы уменьшить скорость перемещения стеклянной подложки 101 с тем, чтобы на поверхности стеклянной подложки 101 формировалась канавка с шагом дорожки 0,32 мкм.
В этом режиме работы, информация адреса, генерируемая генератором 72 адреса, поступает в процессор 81 сигнала через блок 73 переключения. Кроме того, модулятор 83 управляется таким образом, чтобы он модулировал лазерный луч, генерируемый источником 82 лазерного луча на основе модулирующего сигнала, принимаемого из процессора 81 сигнала, для выполнения процесса нарезки и формирования канавки на стеклянной подложке 101 с использованием модулирующего лазерного луча. В этом случае, однако, модулирующий сигнал представляет собой сигнал модуляции MSK, представляющий информацию адреса.
Таким образом, осуществляется процесс нарезки для формирования канавки, такой как показан на фиг.3А в области, которая предназначена для использования в качестве зоны RW.
Когда сигнал, генерируемый датчиком 86, указывает, что процесс нарезки по созданию канавки достиг конца выходной зоны, в момент завершения создания канавки в области, которая предназначена для использования в качестве области RW, контроллер 70 заканчивает процесс нарезки.
При выполнении операций, описанных выше, создается экспонированная часть, соответствующая вобулированным канавкам в зонах РВ и RW на стеклянной подложке 101.
После этого осуществляется такая обработка, как процесс проявления и процесс электроплавления для формирования матрицы, которая предназначена для использования при массовом производстве дисков, описанных выше.
8. Модифицированные версии
В приведенном выше описании были рассмотрены варианты воплощения диска, а также варианты воплощения устройства привода диска и способа производства диска. Однако объем настоящего изобретения не ограничивается данными вариантами воплощения. То есть, в его отношении возможно осуществить множество изменений, не отходящих от объема настоящего изобретения.
Хотя в варианте воплощения данные пользователя записывались в виде отметок с изменением фазы, может использоваться любая техника записи данных пользователя, если только такая техника будет техникой типа повторной записи или однократной записи. Например, настоящее изобретение также может использоваться с диском или устройством привода диска, в которых используется техника магнитооптической записи или техника записи в слой пигмента.
Кроме того, в варианте воплощения информация времени поставки подвергается процессу двухфазной модуляции. Однако модуляция времени поставки также может осуществляться с использованием такого же процесса модуляции, что и для данных пользователя. Например, в случае варианта воплощения, описанного выше, поскольку в процессе модуляции данных пользователя использовалась техника модуляции RLL (1, 7) PP, информация времени поставки также может модулироваться с использованием техники RLL (1, 7) PP.
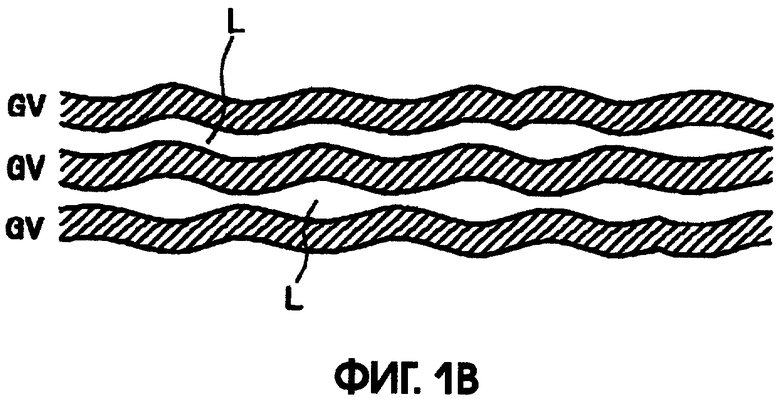

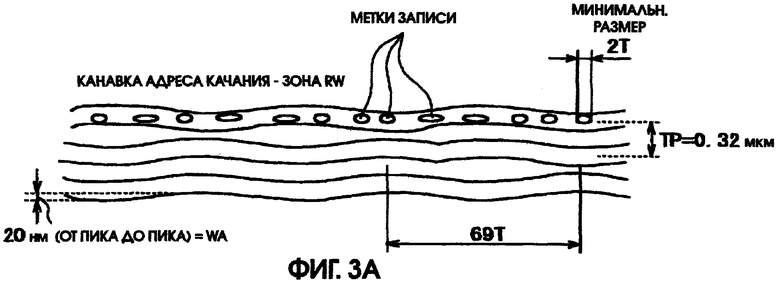
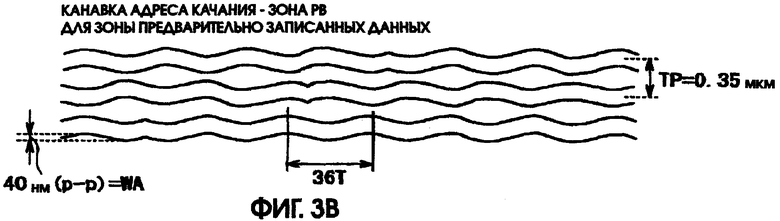
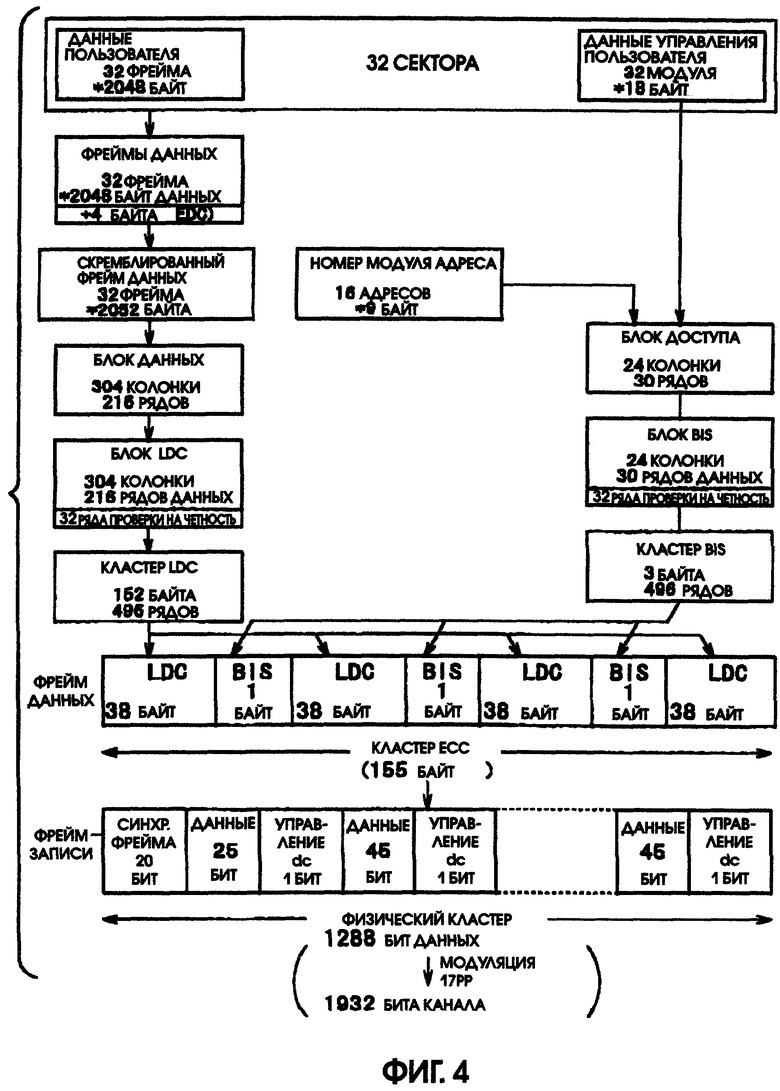


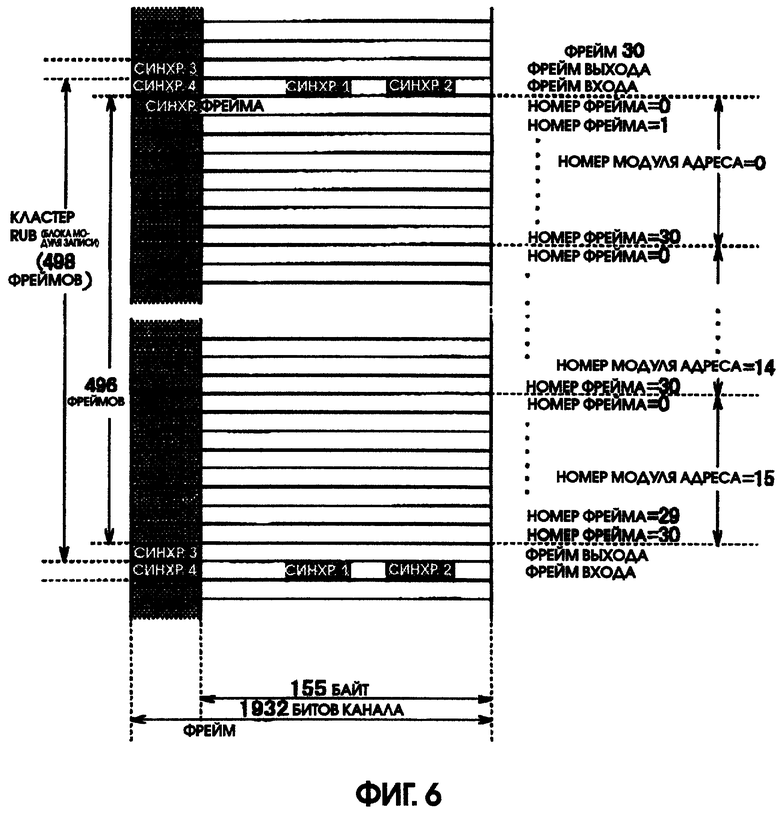



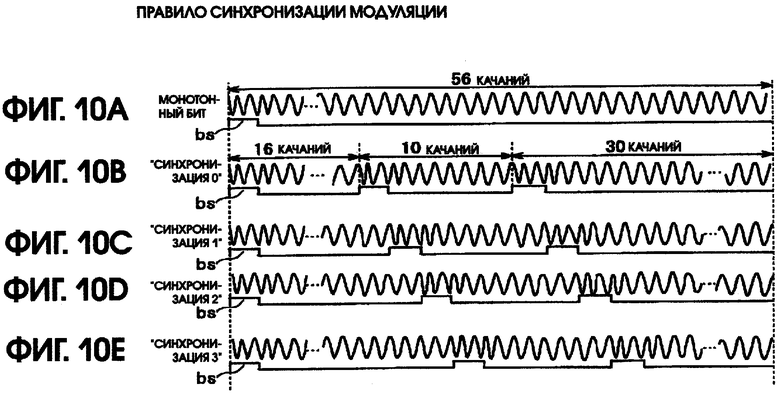


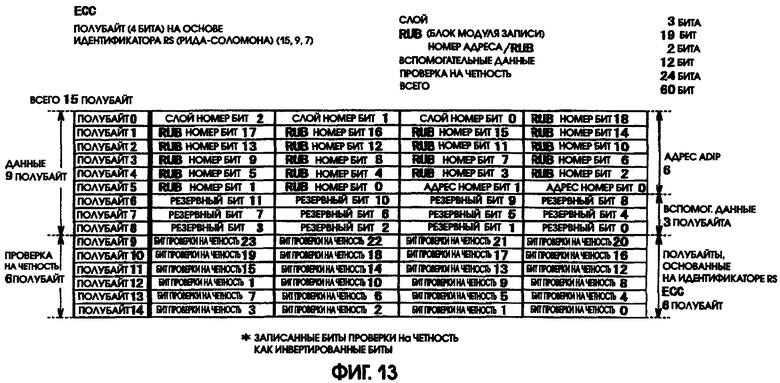
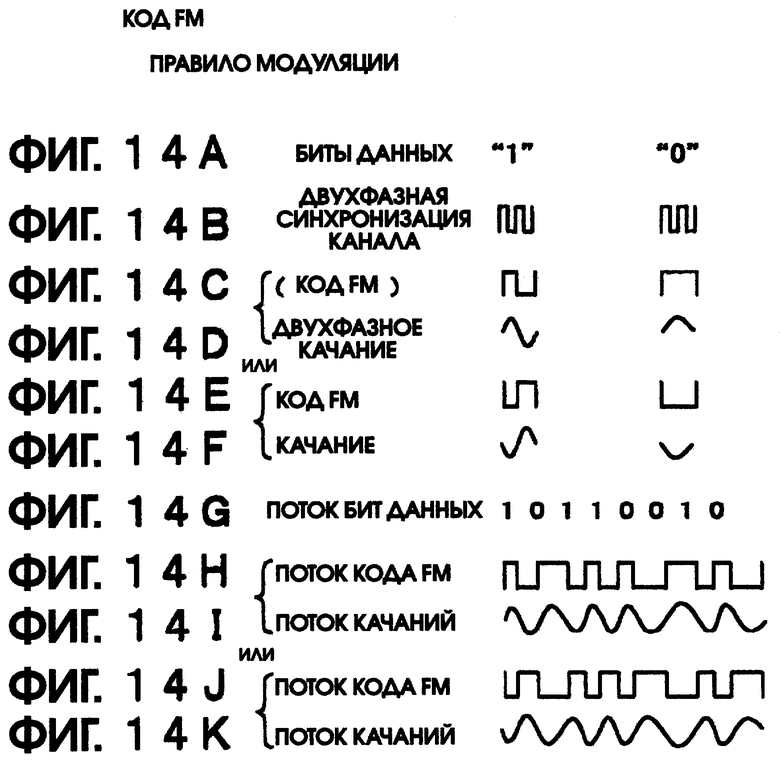



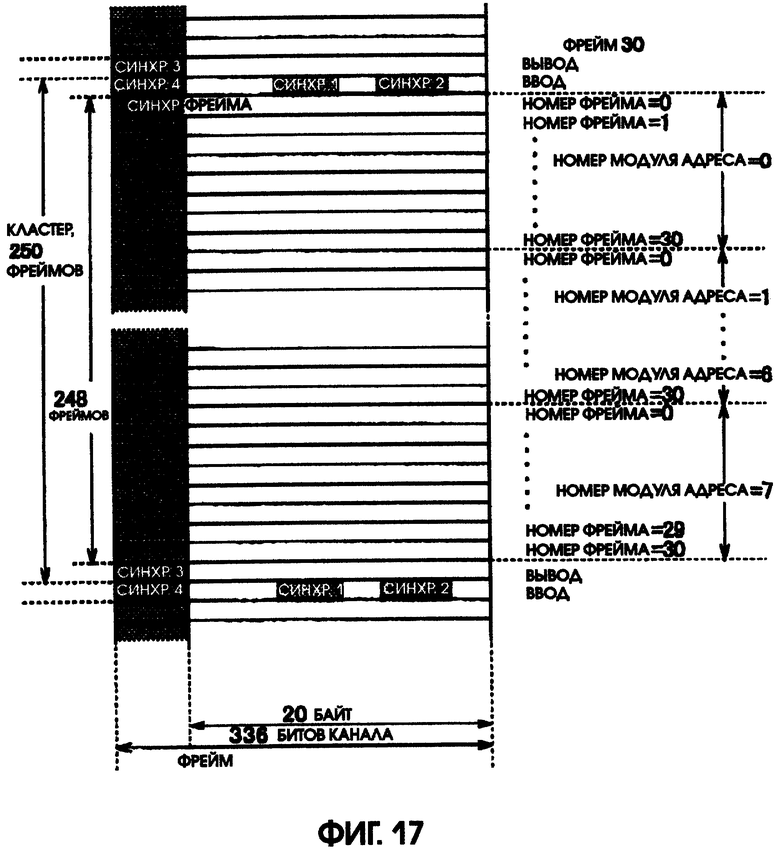

















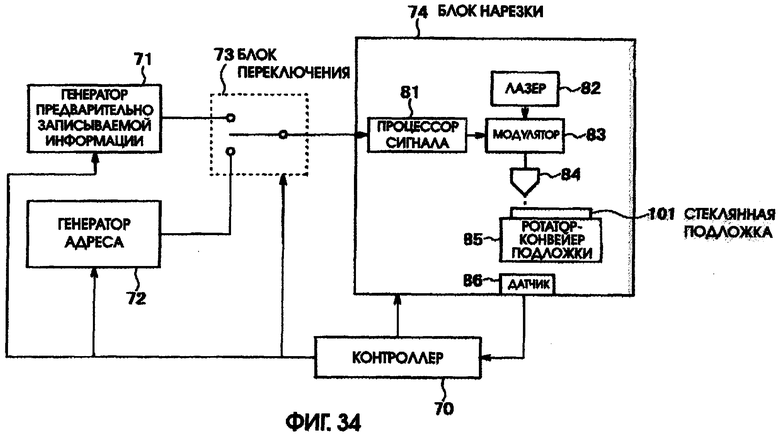
Изобретение относится к оптическому диску, имеющему запись в виде предварительно размеченной канавки. Диск содержит область для записи и воспроизведения и область только для воспроизведения. В первых данных, представляющих данные пользователя, и в третьих данных используют одинаковые коды коррекции ошибки. Первые данные содержат структуру первого блока коррекции ошибки, и третьи данные содержат структуру второго блока коррекции ошибки. Плотность записи третьих данных выбирают меньшей, чем плотность записи первых данных, и количество кодов коррекции в первом блоке коррекции ошибки устанавливают кратным m, в то время как количество кодов коррекции во втором блоке коррекции ошибки устанавливают кратным n/m от количества кодов коррекции в первом блоке коррекции ошибки так, чтобы подсчет участков данных во втором блоке коррекции ошибки также был кратным n/m от значения подсчета участков данных в первом блоке коррекции ошибки. В результате, возможно обеспечить хорошую технику записи информации, относящейся к времени изготовления диска с высокой плотностью записи. 3 н. и 43 з.п. ф-лы, 34 ил.
область записи/воспроизведения, в которую записывают и из которой воспроизводят первые данные с использованием способа обеспечения повторной записи или однократной записи и в которой остаются записанными и из которой воспроизводят вторые данные с использованием техники вобуляции канавки; и
область, предназначенную только для воспроизведения, в которую записывают третьи данные с использованием указанной техники вобуляции канавки, которые предназначены для воспроизведения, в котором:
указанные первые данные записывают с использованием первой техники модуляции и содержат структуру первого блока коррекции ошибки;
указанные вторые данные записывают с использованием второй техники модуляции и
указанные третьи данные записывают с использованием третьей техники модуляции и содержат структуру второго блока коррекции ошибки с таким же кодированием для коррекции, что и в указанной структуре первого блока коррекции ошибки.
указанный первый блок коррекции ошибки содержит структуру первого фрейма, структуру первого подблока, содержащую первые коды коррекции ошибки, и структуру второго подблока, содержащую вторые коды коррекции ошибки; и
указанный второй блок коррекции ошибки содержит структуру второго фрейма, структуру третьего подблока, содержащую первые коды коррекции ошибки, и структуру четвертого подблока, содержащую вторые коды коррекции ошибки.
вобулированной канавки, созданной предварительно;
указанная техника записи с возможностью перезаписи, используемая для записи указанных первых данных, представляет собой технику записи с записью меток с изменением фазы на дорожку, размеченную в виде указанной вобулированной канавки.
вобулированной канавки, созданной предварительно;
указанный способ записи с возможностью перезаписи, используемый для перезаписи указанных первых данных, представляет собой способ записи, в котором осуществляется запись магнитооптических меток на дорожку, размеченную в виде указанной вобулированной канавки.
количество кодов коррекции указанного первого блока ошибки устанавливают кратным m и
количество кодов коррекции указанного второго блока коррекции ошибок устанавливают кратным n/m от количества кодов коррекции в указанном первом блоке коррекции ошибки так, чтобы
подсчет участков данных в указанном втором блоке коррекции ошибки также был кратен n/m от значения подсчета участков данных в указанном первом блоке коррекции ошибки, где переменные m и n обозначают положительные целые числа.
плотность записи третьих данных выбирают меньшей, чем плотность записи первых данных;
количество первых кодов коррекции, составляющих первый подблок, устанавливают кратным m и
количество первых кодов коррекции, составляющих третий подблок, устанавливают кратным n/m от количества кодов коррекции, составляющих первый подблок, так, чтобы
подсчет данных в третьем подблоке также был кратен n/m от значения подсчета участков данных в первом подблоке, где переменные m и n обозначают положительное целое число, принимая во внимание, что
количество вторых кодов коррекции, составляющих второй подблок, устанавливают кратным р и
количество вторых кодов коррекции, составляющих четвертый подблок, устанавливают кратным q/p от количества кодов коррекции, составляющих указанный второй подблок, так, чтобы
подсчет участков данных в четвертом подблоке также был кратен q/p от значения подсчета участков данных во втором подблоке, где переменные р и q обозначают положительные целые числа.
второй фрейм включает сигнал синхронизации в части данных, соответствующей третьему подблоку;
сигнал синхронизации представляет один сигнал, выбираемый из множества типов так, чтобы последовательные вторые фреймы отличались друг от друга.
сигнал синхронизации включает
уникальную структуру синхронизации, содержащую строку битов, никогда не получаемую в результате процесса модуляции при использовании третьего способа модуляции;
идентификатор синхронизации, который представляет собой данные, получаемые в результате процесса модуляции с использованием третьего способа модуляции; и
поле проверки на четность, предназначенное для повышения расстояния кода между сигналами синхронизации.
область записи/воспроизведения, в которой могут быть записаны первые данные и из которой они могут воспроизводиться с использованием техники записи с возможностью перезаписи или однократной записи и в которой были ранее записаны вторые данные, причем эти вторые данные остаются записанными в этой области и могут воспроизводиться из нее с использованием вобуляции канавки; и
область, предназначенную только для воспроизведения, позволяющую воспроизводить третьи данные, записанные в ней, путем использования вобуляции канавки, в котором
указанные первые данные записывают с использованием первого способа модуляции и содержат структуру первого блока коррекции ошибки;
указанные вторые данные записывают с использованием второго способа модуляции и
указанные третьи данные записываются с использованием третьего способа модуляции и содержат структуру второго блока коррекции ошибки, основанную на тех же кодах коррекции, что и в указанной структуре первого блока коррекции ошибок,
указанное устройство привода диска содержит
головку, предназначенную для излучения луча лазера на дорожку, размеченную в виде канавки на указанном дисковом носителе записи, и для приема сигнала отраженного луча;
средство выделения вобуляции, предназначенное для выделения сигнала, представляющего форму вобуляции указанной дорожки из указанного сигнала отраженного луча;
средство выделения сигнала первых данных, предназначенное для выделения сигнала, представляющего указанные первые данные, из указанного сигнала отраженного луча;
средство демодуляции вторых данных, предназначенное для демодуляции при операции воспроизведения, осуществляемой из указанной области записи/воспроизведения, причем указанный сигнал представляет указанную форму вобуляции указанной дорожки с помощью второго способа модуляции;
средство демодуляции первых данных, предназначенное для демодуляции указанного сигнала, представляющего указанные первые данные при выполнении операции воспроизведения из указанной области записи/воспроизведения с использованием указанного первого способа модуляции;
средство демодуляции третьих данных, предназначенное для демодуляции при операции воспроизведения, осуществляемой из области, предназначенной только для воспроизведения, указанного сигнала, представляющего указанную форму вобуляции указанной дорожки, с использованием указанного третьего способа модуляции;
средство коррекции ошибки, предназначенное для осуществления обработки коррекции ошибки на основе указанных кодов коррекции ошибки результата модуляции с выхода указанного средства демодуляции первых данных и результата модуляции с выхода указанного средства демодуляции третьих данных; и
средство управления, предназначенное для управления указанным средством демодуляции вторых данных для осуществления обработки демодуляции и/или для обработки демодуляции при операции записи/воспроизведения, осуществляемой в указанной области записи/воспроизведения, которое производит запрос указанного средства коррекции ошибки для осуществления обработки коррекции ошибки на основе указанного первого блока коррекции ошибки при операции записи/воспроизведения, осуществляемой в указанной области записи/воспроизведения, с управлением указанного средства демодуляции третьих данных, для осуществления обработки демодуляции при операции воспроизведения, выполняемой из указанной области, предназначенной только для воспроизведения, с запросом указанного средства коррекции ошибки для осуществления обработки коррекции ошибки на основе указанного второго блока коррекции ошибки при операции воспроизведения, осуществляемой из указанной области, предназначенной только для воспроизведения.
область записи/воспроизведения, в которой могут быть записаны первые данные и из которой они могут воспроизводиться с использованием способа записи с возможностью перезаписи или однократной записи и в которой были ранее записаны вторые данные, причем эти вторые данные остаются записанными в этой области и могут воспроизводиться из нее с использованием вобуляции канавки; и
область, предназначенную только для воспроизведения, позволяющую воспроизводить третьи данные, записанные в ней, с использованием способа вобуляции канавки, с помощью которого
первые данные записывают с использованием первого способа модуляции и содержат структуру первого блока коррекции ошибки;
вторые данные записывают с использованием второго способа модуляции
и третьи данные записывают с использованием третьего способа модуляции и содержат структуру второго блока коррекции ошибки, основанную на тех же кодах коррекции, что и в структуре первого блока коррекции ошибки, для осуществления операции воспроизведения, выполняемой из области записи/воспроизведения, причем способ воспроизведения дополнительно содержит следующие этапы:
излучение луча лазера на дорожку, формируемую в виде канавки на указанном дисковом носителе записи, и прием сигнала отраженного луча;
выделение сигнала, представляющего указанную форму вобуляции дорожки, и сигнала, представляющего первые данные из сигнала отраженного луча;
демодуляцию выделенного сигнала, представляющего форму вобуляции дорожки, с использованием второго способа модуляции и осуществление процесса декодирования для получения информации адреса;
демодуляцию выделенного сигнала, представляющего первые данные, с использованием способа демодуляции, соответствующего первому способу модуляции, используемого для модуляции сигнала, представляющего первые данные; и
осуществление обработки коррекции ошибки на основе кодов коррекции ошибки первого блока коррекции ошибки для воспроизведения первых данных, в то время, как
для выполнения операции воспроизведения, осуществляемой из области, предназначенной только для воспроизведения, способ воспроизведения дополнительно содержит следующие этапы:
излучение луча лазера на дорожку, создаваемую в форме канавки, и прием сигнала отраженного луча;
выделение сигнала, представляющего указанную форму вобуляции дорожки, из сигнала отраженного луча;
демодуляцию выделенного сигнала, представляющего форму вобуляции дорожки, с помощью третьего способа модуляции и
осуществление обработки коррекции ошибки на основе кодов коррекции ошибки второго блока коррекции ошибки для воспроизведения третьих данных.
| US 6249508 А, 19.06.2001 | |||
| US 6058099 A, 02.05.2000 | |||
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА САМОХОДНОГОКРАНА | 1972 |
|
SU430042A1 |
| Застежка-молния и способ ее изготовления | 1974 |
|
SU517230A3 |
| Способ оптической записи информации на дисковый носитель | 1982 |
|
SU1053156A1 |
| RU 99118674 А, 10.07.2001. | |||

