Область техники, к которой относится изобретение
Настоящее изобретение относится к способу изготовления оптического диска, оптическому диску, способу воспроизведения оптического диска, устройству воспроизведения оптического диска и устройству записи оптического диска.
Уровень техники
Оптические диски (включая магнитооптические диски), такие как, например, компакт-диск (CD), минидиск (MD), цифровой универсальный диск (DVD), диск BLU-RAY (зарегистрированный товарный знак) и т.п., известны как носители записи, на которых записывают и с которых воспроизводят цифровые данные.
"Оптический диск" представляет собой обобщенное название для носителя записи в форме круглого диска, на котором тонкая металлическая пластина покрыта пластиком и с которого может быть считан сигнал путем освещения лазерным лучом диска и считывания изменений в отраженном луче.
Раскрытие изобретения
В последние годы было достигнуто значительное увеличение емкости благодаря записи с высокой плотностью, такой как можно видеть на диске Blu-ray.
Среди современных дисков Blu-ray известны диски с одним слоем записи и с двумя слоями записи, имеющие емкость записи приблизительно 25 гигабайт (Gb) и 50 Гбайт, и их используют для записи видеосодержания и программ приложения.
Использование записи с высокой плотностью, многослойных структур и т.п. исследуют как способы дополнительного увеличения емкости формата диска Blu-ray.
Однако были установлены различные типы спецификаций оборудования, которые совместимы с современной версией диска Blu-ray (ниже называется диском Версии 1.0), и существует беспокойство, что новая версия создаст проблемы с устройствами привода диска, которые уже коммерчески доступны в настоящее время (ниже называются приводами Версии 1.0).
Например, если новая версия диска Blu-ray, которая содержит многослойную структуру, содержащую, по меньшей мере, три слоя (ниже называется диском Версии 2.0), станет коммерчески доступной в будущем, может случиться, что пользователь загрузит диск Версии 2.0 в привод Версии 1.0.
В принципе, поскольку формат диска Blu-ray является одинаковым, запись и воспроизведение диска Версии 2.0 в приводе Версии 1.0 не являются абсолютно невозможными. Однако если диск Версии 2.0 будет получен с использованием более высокой плотности и с большим количеством слоев, можно предположить, что различные типы спецификаций, в соответствии с которыми построен привод Версии 1.0, станут неадекватными.
Поэтому в случае когда запись и воспроизведение диска Версии 2.0 будут выполнены на приводе Версии 1.0, возникает беспокойство в связи с возникновением с большей частотой ошибок при записи и ошибок при воспроизведении.
Настоящее изобретение выполнено с учетом описанной выше проблемы и делает запись и воспроизведение невозможными для диска Версии 2.0, загруженного в привод Версии 1.0. Другими словами, вместо обеспечения возможности записи и воспроизведения неприемлемым способом настоящее изобретение делает диск Версии 2.0 несовместимым с приводом Версии 1.0. И, наоборот, это повышает удобство и простоту использования системы диска Blu-ray для пользователя.
В соответствии с настоящим изобретением, как описано выше, кодированную информацию адреса коррекции ошибок записывают на носитель записи второй версии после преобразования таким образом, что декодирование адреса не может быть выполнено устройством воспроизведения, которое не совместимо со второй версией носителя записи. Поэтому декодирование адреса для носителя записи второй версии не может быть выполнено с использованием несовместимого устройства воспроизведения (например, устройство воспроизведения, которое было изготовлено так, чтобы оно было совместимым только с первой версией носителя записи).
Другими словами, ту же обработку кодирования коррекции ошибки используют как для первой версии, так и для второй версии, но в результате кодированная информации адреса коррекции ошибки, преобразованной путем инвертирования определенных битов или тому подобное, создают состояние, в котором ошибки в адресе не могут быть скорректированы, поэтому декодирование адреса становится невозможным. Поскольку декодирование адреса не может быть выполнено, если носитель записи второй версии будет загружен в несовместимое устройство воспроизведения, оно может быть переведено в состояние, в котором доступ к диску будет невозможным (запись и воспроизведение невозможны).
В соответствии с настоящим изобретением на носителе записи в соответствии с настоящим изобретением (носитель записи второй версии) становится возможным сформировать состояние, в котором декодирование адреса не может быть выполнено, что делает невозможными запись и воспроизведение в известном устройстве записи и в известном устройстве воспроизведения, которые совместимы только с первой версией носителя записи, в котором используется тот же формат данных и та же обработка коррекции ошибки, что и во второй версии. Таким образом, даже при том что носитель записи второй версии в соответствии с настоящим изобретением является носителем записи того же типа, что и носитель записи первой версии, становится возможным сделать только носитель записи второй версии непригодным для использования в известном устройстве записи и в известном устройстве воспроизведения, что позволяет исключить возникновение нестабильного рабочего состояния. Таким образом, улучшаются удобство и простота использования всей системы.
Краткое описание чертежей
На фиг.1 показан пояснительный чертеж канавки на диске в соответствии с вариантом осуществления настоящего изобретения.
На фиг.2 показан пояснительный чертеж структуры области диска в соответствии с вариантом осуществления.
На фиг.3 показан пояснительный чертеж структуры ЕСС основных данных в соответствии с вариантом осуществления.
На фиг.4 показан пояснительный чертеж структуры ЕСС предварительно записанной информации в соответствии с вариантом осуществления.
На фиг.5 показан пояснительный чертеж структуры фрейма в соответствии с вариантом осуществления.
На фиг.6 показан пояснительный чертеж адреса в данных в соответствии с вариантом осуществления.
На фиг.7 показан пояснительный чертеж структуры ЕСС адреса в данных в соответствии с вариантом осуществления.
На фиг.8 показан пояснительный чертеж структуры BIS в соответствии с вариантом осуществления.
На фиг.9 показан чертеж для пояснения записи и воспроизведения адреса в данных в соответствии с вариантом осуществления.
На фиг.10 показан чертеж для пояснения адреса в качаниях в соответствии с вариантом осуществления.
На фиг.11 показан чертеж для пояснения блока адреса для RUB в соответствии с вариантом осуществления.
На фиг.12 показан чертеж для пояснения структуры ЕСС информации ADIP в соответствии с вариантом осуществления.
На фиг.13 показан чертеж для пояснения записи и воспроизведения адреса качания в соответствии с вариантом осуществления.
На фиг.14 показан чертеж для пояснения установки инверсного положения символа в соответствии с вариантом осуществления.
На фиг.15 показана блок-схема устройства привода диска в соответствии с вариантом осуществления.
На фиг.16 показана блок-схема устройства мастеринга, на котором изготовляют диск в соответствии с вариантом осуществления.
На фиг.17 показана блок-схема последовательности операций, представляющая процесс детектирования, является ли диск трехслойным/четырехслойным диском, и выполнения соответствующей последующей обработки.
На фиг.18 показана блок-схема, представляющая модули обработки, для избирательной обработки перед обработкой ЕСС в зависимости от того, определен ли диск как однослойный/двухслойный диск или трехслойный/четырехслойный диск.
Описание вариантов осуществления
Ниже будут подробно описаны предпочтительные варианты осуществления настоящего изобретения со ссылкой на приложенные чертежи. Следует отметить, что в данном описании и на приложенных чертежах структурные элементы, которые имеют, по существу, одинаковую функцию и конфигурацию, обозначены одинаковыми номерами ссылочных позиций, и повторное пояснение этих структурных элементов исключено.
Ниже вариант осуществления настоящего изобретения поясняется в следующем порядке.
1. Диск
2. Запись и воспроизведение адреса в данных
3. Запись и воспроизведение адресов в качаниях
4. Устройство привода диска
5. Устройство мастеринга
1. Диск
Вначале поясняются физические характеристики и качания дорожек диска, которые представляют собой настоящий вариант осуществления.
Оптический диск в соответствии с настоящим примером принадлежит к категории диска Blu-ray. Для диска Blu-ray в соответствии с настоящим вариантом осуществления используют формат данных, в котором информация адреса кодирована с коррекцией ошибок, так же как и в существующем диске Blu-ray, и во время воспроизведения, используемая обработка коррекции ошибки является той же, что используется для современного диска Blu-ray.
Следует отметить, что ниже современный диск Blu-ray, на который была сделана ссылка выше, называется диском Версии 1.0, и диск Blu-ray, который соответствует диску в соответствии с настоящим вариантом осуществления, будет называться диском Версии 2.0.
Кроме того, устройство записи и устройство воспроизведения для существующего диска Blu-ray называется приводом Версии 1.0. В соответствии с этим устройство записи и устройство воспроизведения в соответствии с настоящим вариантом осуществления, то есть устройства привода диска, которые совместимы с диском Версии 2.0, называются в некоторых случаях приводами Версии 2.0.
Вначале будут описаны основная физическая структура и структура данных диска Blu-ray.
Диск Blu-ray включает в себя два типа: тип, предназначенный только для воспроизведения, который известен как BD-ROM, и тип, который выполнен с возможностью записи данных пользователя.
В типе, предназначенном только для воспроизведения, запись информации выполняют, используя то, что называется рядами рельефных углублений.
В диске, выполненном с возможностью записи, данные могут быть записаны, используя один из способа записи с изменением пигментного покрытия и способа записи с изменением фазы.
Способ записи с изменением пигментного покрытия также называется способом записи с однократной записью и является предпочтительным для носителей данных и т.п., поскольку данные могут быть записаны один раз и не могут быть перезаписаны. В отличие от этого способ записи с изменением фазы позволяет перезаписывать данные и используется для различных вариантов применения начиная с записи различных типов содержания, такого как музыка, видеоданные, игры, прикладные программы и т.п.
Диаметр диска Blu-ray составляет 120 миллиметров. Толщина диска составляет 1,2 миллиметра. Таким образом, если рассматривать снаружи, с этой точки зрения диск Blu-ray является таким же, как и компакт-диск (CD) и цифровой универсальный диск (DVD).
Длина волны излучения лазера для записи и воспроизведения составляет 405 нанометров, и используется то, что называют синим лазером. NA (цифровая апертура) оптической системы составляет 0,85.
Дорожки, которые сформированы рядами рельефных углублений, и дорожки из канавок, в которых записаны метки с изменением пигмента и метки с изменением фазы, имеют шаг дорожки 0,32 микрометра и линейную плотность 0,12 микрометров.
Кроме того, емкость данных пользователя может быть достигнута приблизительно от 23 до 25 Гбайт на слой.
Для записи данных на диске, предназначенном для записи, используя способ записи с изменением пигментного покрытия, способа записи с изменением фазы или тому подобное, требуется использовать способ направления, выполняющий отслеживание дорожек данных. С этой целью канавки формируют заранее как предварительно сформированные канавки и одна из канавок и площадок (более высокие области между канавками) определены как дорожки данных.
Требуется информация адреса, которая позволяет записывать данные в определенных положениях на дорожках данных, и эту информацию адреса записывают, используя качания (изгибы) канавки.
Как схематично показано на фиг.1-1а, канавка GV сформирована на диске 100 в виде спирали начиная от самой внутренней стороны до внешней стороны. Следует отметить, что в случае диска, предназначенного только для воспроизведения, канавку не формируют, но дорожку формируют из ряда рельефных углублений в виде такой спиральной формы.
Кроме того, запись данных и воспроизведение выполняют при приводе диска во вращение с использованием системы с постоянной линейной скоростью (CLV), и CLV также относится к канавке GV. Поэтому количество волн качаний в канавке GV за один оборот вокруг дорожки увеличивается по мере того как дорожка перемещается в направлении внешней кромки диска.
Как показано на фиг.1-1b, физический адрес в канавке GV выражен путем формирования качаний (извилин). Другими словами, стенки левой и правой сторон канавки GV качаются в соответствии с сигналом, который генерируют на основе адреса или тому подобное.
Область между канавкой GV и соседней канавкой GV представляет собой площадку L, и запись данных, которая описана выше, выполняют в канавках GV. Другими словами, канавки GV представляют собой дорожки данных. Следует отметить, что также возможно использовать площадку L как дорожку данных, при выполнении записи данных на площадке L и что как канавки GV, так и площадку L можно использовать как дорожки данных.
Заранее формируя предварительно сформированные канавки как дорожки, в которые будут записаны данные таким образом и формируя качания на боковых стенках предварительно сформированных канавок в соответствии с информацией адреса, можно считывать адреса на основе информации качания, которую получают во время записи и во время воспроизведения в форме информации отраженного луча. Например, доступ к требуемому местоположению может быть получен, и данные могут быть записаны и могут быть воспроизведены, даже если данные углублений или тому подобное обозначают, что адреса не были сформированы на диске заранее.
Следует отметить, что информация адреса, которая выражена в канавках, которые качаются таким образом, называется одним из абсолютного времени в предварительно сформированной канавке (ATIP) и адреса в предварительно сформированной канавке (ADIP).
На фиг.2 показана компоновка (конфигурация зоны) всего диска. Следует отметить, что на фиг.2 показан пример диска, предназначенного для записи.
Вводная зона, зона данных и выводная зона предусмотрены как зоны на диске начиная с внутренней стороны.
Кроме того, если рассматривать конфигурацию зоны в отношении записи и воспроизведения, внутренний участок вводной зоны обозначен как зона РВ (зона, предназначенная только для воспроизведения) и зона от внешнего участка вводной зоны до выводной зоны обозначена как зона RW (зона записи и воспроизведения).
Вводная зона расположена на внутреннем участке диска в пределах радиуса 24 миллиметра от центра. Область, которая находится в диапазоне от 22,3 до 23,1 миллиметров от центра, обозначена как зона предварительно записанных данных.
В зоне предварительно записанных данных информация (предварительно записанная информация), которая используется для защиты от копирования и т.п., записана заранее путем формирования качаний канавки, которая сформирована в виде спиральной формы на диске. Эта информация предназначена только для воспроизведения и не может быть перезаписана. Другими словами, зона предварительно записанных данных представляет собой зону РВ (зону, предназначенную только для воспроизведения), которая описана выше.
В предварительно записанной зоне данных может быть записана информация защиты от копирования, например как предварительно записанная информация, и эта информация защиты от копирования может использоваться, например, при выполнении задач, описанных ниже.
В системе оптического диска в соответствии с настоящим примером зарегистрированные изготовитель устройства привода и изготовитель диска могут заниматься бизнесом и имеют ключ носителя и ключ привода, которые обозначают, что они зарегистрированы.
Один из ключа привода и ключа носителя записан как информация защиты от копирования для защиты от неавторизованного доступа. Носители информации и приводы, которые имеют ключ носителя и ключ привода, могут быть сделаны недоступными для записи и воспроизведения, используя информацию защиты от копирования.
Во вводной зоне предусмотрена область тестовой записи и область управления дефектами в диапазоне от 23,1 до 24 миллиметров от центра диска. Область тестовой записи используется для теста, когда устанавливают условия для записи и воспроизведения меток с изменением фазы, такие как, например, мощность лазера во время записи и воспроизведения.
Информация для информации управления дефектами на диске записана и воспроизводится из области управления дефектами.
Область в диапазоне от 24,0 до 58,0 миллиметров от центра диска обозначена как зона данных. Зона данных представляет собой область, в которой данные пользователя были записаны с использованием меток изменения фазы и из которой воспроизводят данные пользователя.
Область в диапазоне от 58,0 до 58,5 миллиметров от центра диска обозначена как выводная зона. Область управления дефектами того же типа, как и во вводной зоне, предусмотрена в выводной зоне, и во время поиска дорожки область управления дефектами используется как зона буфера, которая обеспечивает возможность работы при переполнениях.
Область от 23,1 миллиметров от центра диска, то есть от области тестовой записи, до выводной зоны обозначена как зона RW (зона записи и воспроизведения), где записаны метки изменения фазы и откуда они воспроизводятся.
На фиг.2 также показана область прорезания (ВСА), расположенная рядом с центральным отверстием. ВСА в случае необходимости включает в себя информацию, которая может быть записана во время мастеринга таким образом, чтобы сделать диск идентифицируемым как диск определенного типа. ВСА также может быть индивидуально записана с помощью лазера для "вырезания" информации в отражающем слое законченного диска. В компоновке диска, показанной на фиг.2, зона ВСА включает в себя флаг, обозначающий, является ли диск однослойным диском или двухслойным диском (одиночный/двойной диск), или трехслойным, или четырехслойным диском (тройной/четверной). Однослойный или двухслойный диск представляет собой пример диска более раннего поколения, в то время как трехслойный или четырехслойный диск представляет собой пример диска второго или более позднего поколения. Устройство воспроизведения, которое вначале считывает зону ВСА, проверяет "флаг слоя", записанный в зоне ВСА. Если этот флаг присутствует, диск распознают как трехслойный или четырехслойный диск. Этот процесс более подробно описан со ссылкой на фиг.17. Пример, который описан выше, представляет диск записываемого типа, но вводная зона, зона данных и выводная зона также расположены точно так же на диске, предназначенном для только для воспроизведения. Однако область тестовой записи и область управления дефектами не предусмотрены, и весь диск представляет собой зону, предназначенную только для воспроизведения, в которой воспроизведение основано на рельефных углублениях.
Далее со ссылкой фиг.3, фиг.4 и фиг.5 поясняются структуры кода коррекции ошибки (ЕСС) для данных, которые записаны как основные данные в форме меток изменения фазы, рельефных углублений или тому подобное, и для данных, которые записаны как информация ADIP в форме качаний в дорожках.
Следует отметить, что данные, которые записаны в дорожках в форме одних из меток изменения фазы, меток изменения пигмента и виде рядов рельефных углублений, называются основными данными, и, таким образом, их отличают от данных, которые записаны в форме качаний дорожек, которые называются данными качания.
Вначале формат ЕСС для основных данных (данных пользователя) показан на фиг.3.
Два кода, код большого расстояния (LDC) и подкод индикатора пакета (BIS), используются как ЕСС основных для данных размером 64-килобайта (2048 байтов на сектор ×32 сектора).
Основные данные размером 64-килобайта, которые показаны на фиг.3-3а, кодируют с ЕСС, как показано на фиг.3-3b. Таким образом, 4-байтовый код детектирования ошибок (EDC) присоединяют к 2048 байтам в каждом секторе, и LDC кодируют для 32 секторов. LDC представляют собой коды Рида-Соломона (RS) с RS (248, 216, 33), где длина кодового слова составляет 248, длина данных составляет 216 и расстояние составляет 33. Существуют 304 кодовых слова.
В отличие от этого BIS кодирует ЕСС, как показано на фиг.3-3d для 720 байтов данных, которые показаны на фиг.3-Зс. Таким образом, они представляют собой коды Рида-Соломона (RS) с RS (62, 30, 33), где длина кодового слова равна 62, длина данных равна 30 и расстояние равно 33. Существуют 24 кодовых слова.
Структура фрейма для основных данных показана на фиг.5-5а.
Данные LDC и данные BIS, описанные выше, конфигурируют структуру фрейма, которая показана на чертеже. Таким образом, один фрейм состоит из 155 байтов, расположенных как данные (38 байтов), BIS (1 байт), данные (38 байтов), BIS (1 байт) и данные (38 байтов). Другими словами, один фрейм состоит из 152 байтов данных (32 байта ×4) с 1-байтными BIS, вставленными для каждых 38 байтов данных.
Сигнал FS синхронизации фрейма размещен вначале 155-байтного фрейма. Существуют 496 фреймов в одном блоке.
В данных LDC кодовые слова с четным номером 0, 2 и т.п. помещены в фреймах с четными номерами 0, 2 и т.п., в то время как кодовые слова 1, 3 и т.п. с нечетными номерами размещены в фреймах с нечетными номерами 1, 3 и т.п.
BIS представляет собой код, который обладает намного большей корректирующей способностью, чем код LDC, и корректирует практически все ошибки. Другими словами, код, для которого расстояние составляет 33, используется для длины 62 кодового слова.
Поэтому символ BIS, для которого детектируют ошибку, можно использовать, как описано ниже.
Когда выполняют декодирование ЕСС, вначале декодируют BIS. В структуре фрейма, которая показана на фиг.5-5а, в случае когда возникают две ошибки между последовательными BIS или между BIS и сигналом FS синхронизации фрейма, 38 байтов данных, которые связаны последовательными BIS или BIS и сигналом FS синхронизации фрейма, рассматривают как пакет ошибок. Указатели ошибки прилагают к ошибкам в 38 байтах данных. Используя LDC, указатели ошибки используют для выполнения коррекции стирания указателя.
Это позволяет повысить корректирующую способность путем коррекции только LDC.
Информация адреса и т.п. включены в BIS. Информацию адреса используют в случае, когда информация адреса не доступна из качающихся канавок, как в случае диска типа ROM или тому подобное. Конечно, информацию адреса также можно использовать для получения адреса во время воспроизведения диска, предназначенного для записи.
Следует отметить, что единичный блок записи (RUB), кластер записи и воспроизведения, который представляет собой минимальную единицу записи, состоит из 498 фреймов, которые включают в себя 496 фреймов блока ЕСС основных данных, которые показаны на фиг.5-5а, плюс две соединительных области по одному фрейму каждая, прикрепленные вначале и в конце для PLL и т.п.
Далее будет описан формат ЕСС для данных качания, показанных на фиг.4.
В этом случае два кода, код большого расстояния (LDC) и подкод индикатора пакета (BIS), используют как ЕСС для данных размером 4-килобайта (2048 байт на сектор ×2 сектора).
Данные качания размером 4-килобайта, которые показаны на фиг.4-4а, кодируют ЕСС, как показано на фиг.4-4b. Таким образом, код (EDC) детектирования ошибки размером 4-байта прикреплен к 2048 байтам в каждом секторе, и LDC кодируют для 2 секторов. LDC представляют собой коды Рида Соломона (RS) с RS (248, 216, 33), где длина кодового слова равна 248, длина данных равна 216 и расстояние составляет 33. Существуют 19 кодовых слов.
В отличие от этого BIS кодирует ЕСС, как показано на фиг.4-4d для 120 байтов данных, которые показаны на фиг.4-4 с. Таким образом, они представляют собой коды Рида Соломона (RS) с RS (62, 30, 33), где длина кодового слова равна 62, длина данных равна 30 и расстояние равно 33. Существуют 4 кодовых слова.
Структура фрейма для данных качания показана на фиг.5-5b.
Данные LDC и BIS, описанные выше, образуют структуру фрейма, которая показана на чертеже. Таким образом, один фрейм состоит из 21 байта, расположенных как сигнал FS синхронизации фрейма (1 байт), данные (10 байт), BIS (1 байт) и данные (9 байтов). Другими словами, один фрейм состоит из 19 байт данных со вставленным 1-байтовым BIS.
Сигнал FS синхронизации фрейма размещен в начале фрейма. Существуют 248 фреймов в одном блоке.
В этом случае BIS также представляет собой код, который обладает гораздо большей корректирующей способностью, чем код LDC, и корректируются практически все ошибки. Поэтому символ BIS, для которого детектируется ошибка, можно использовать, как описано ниже.
Когда выполняют декодирование ЕСС, вначале декодируют BIS. В случае, когда две ошибки возникают между последовательными BIS или между BIS и сигналом FS синхронизации фрейма, один из 10 байтов данных и 9 байтов данных, которые связаны последовательными BIS или с помощью BIS и сигнала FS фрейма синхронизации, обрабатывают как пакет ошибок. Указатели ошибки прикрепляют к ошибкам в одном из 10 байтов данных и 9 байтов данных. С помощью LDC указатели ошибки используются для выполнения коррекции удаления указателя.
Это позволяет повысить корректирующую способность путем коррекции только LDC.
Как можно видеть на фиг.5 и фиг.6, одни и те же коды и структуры используются как в формате ЕССС, как для данных в форме меток изменения фазы, так и для заранее записанной информации.
Это означает, что обработка декодирования ЕСС для заранее записанной информации может быть выполнена с помощью системы цепей, которая выполняет обработку декодирования ЕСС во время воспроизведения данных в форме меток изменения фазы, поэтому можно более эффективно использовать аппаратную конфигурацию как устройство привода диска.
2. Запись и воспроизведение адреса в данных
В настоящем примере поясняется запись и воспроизведение адреса в данных на диске (диск Версии 2.0). Адрес в данных представляет собой информацию адреса, которая включена в BIS структуры блока ЕСС основных данных, которая показана на фиг.3 и на фиг.5-5а.
На фиг.6-6а и 6b показаны структуры номера единичного адреса (AUN) для диска Версии 1.0 и для диска Версии 2.0 (диск в соответствии с настоящим вариантом осуществления).
Вначале, как показано на фиг.6-6а, в диске Версии 1.0, AUN из четырех символов (в котором один символ составляет восемь битов) формируют с помощью AUN0-AUN3. Эти четыре символа обозначены битами А0-A31.
Пять битов А0-А4 представляют собой номер в кластере. Кластер представляет собой структурный модуль единичного блока записи (RUB), кластер записи и воспроизведения, который представляет собой единичный модуль записываемых данных.
Девятнадцать битов А5-А23 представляют собой адрес кластера.
Три бита А24-А26 представляют собой количество слоев (количество слоев записи). Биты А27-А31 зарезервированы.
В отличие от этого структура AUN для диска Версии 2.0 выполнена так, как показано на фиг.6-6b.
В пределах битов А0-A31, которые используются как AUN0-AUN3 из четырех символов, пять битов А0-А4 представляют собой номер в кластере. Двадцать битов А5-А24 представляют собой адрес кластера. Три бита А25-А27 представляют собой количество слоев. Биты А28-A31 зарезервированы.
Другими словами, количество битов адреса кластера было увеличено до двадцати в соответствии с увеличением общего количества кластеров ввиду увеличения емкости.
Кодирование коррекции ошибки (кодирование ЕСС) информации адреса выполняют в единицах модулей, составляющих единицы адреса, которые показаны на фиг.7.
На фиг.7-7а показаны единицы адреса AU0-AU15, каждая из которых состоит из девяти байтов.
Единица AU0 адреса выполнена из полей AF0,0-AF8,0 адреса.
Единица AU1 адреса выполнена из полей AF0,1-AF8,1 адреса.
Каждая из единиц адреса вплоть до AU15 составлена из девяти байтов одинаковым образом.
Одиночное поле AF адреса составляет один байт (один символ).
Кодирование ЕСС выполняют в единицах из девятибайтных единиц адреса. Единица AU адреса содержит AUN, которые показаны на фиг.6, а также байты проверки на четность. Например, если единица AU0 адреса используется как пример, она выполнена так, как показано на фиг.7-7b.
Номера AUN3, AUN2, AUN1 и AUN0 единиц адреса соответственно выделены для полей AF0,0, AF1,0, AF2,0, AF3,0 адреса в единице AU0 адреса. Поле AF4,0 адреса используется как бит флага.
Байты проверки на четность (проверка на четность 3 - проверка на четность 0) выделены для полей AF5,0 к AF8,0 адреса.
Поскольку четыре символа из девяти символов имеют проверку на четность, коррекция ошибок, в которой используется кодирование ЕСС в единицах, состоящих из единиц адреса, обладает возможностью коррекции ошибок вплоть до двух символов.
Данные, кодированные с коррекцией ошибки, которые уже были сформированы как единицы адреса, представляют собой коды RS с RS (9, 5,5), где длина кодового слова равняется 9, длина данных равняется 5 и расстояние составляет 5.
Размещение единиц адреса в основном блоке данных показано на фиг.8. Основной блок данных представляет собой блок, который показан на фиг.5-5а.
В пределах 496 фреймов основного модуля данных единицы адреса разделены на единицы по 31 фрейму каждая с помощью BIS.
BIS для одного фрейма занимает три байта таким образом, что BIS для 31 фрейма занимают 93 байта, но единицы адреса размещены в первых девяти байтах по 93 байта. Данные управления и т.п. размещены в остальных байтах BIS.
Как показано на фиг.8, поля AF0,0-AF8,0 адреса, которые составляют модуль AU0 адреса, размещены в девяти байтах BIS в первой единице из 31 фрейма.
Кроме того, поля от AF0,1 до AF8,1 адреса, которые составляют единицу AU1 адреса, размещены в девяти байтах BIS во второй единице из 31 фрейма.
После этого единицы AU2-AU15 адреса помещены в байтах BIS в каждой единице из 31 фрейма таким же образом.
BIS, которые были описаны выше, обладают возможностью строгой коррекции, но коррекцию ошибок для модулей адреса выполняют в единицах, составляющих единицы адреса. Это выполняют, поскольку при коррекции с использованием блока BIS, которая показана на фиг.3-3d, декодирование адреса, для которого требуется высокая скорость, выполняется слишком медленно.
Поэтому способность коррекции информации адреса зависит от возможности коррекции модуля AU адреса, поэтому возможно корректировать вплоть до двух символов, как описано выше.
Другими словами, ошибки, составляющие более чем два символа, невозможно скорректировать. Кроме того, если ошибки возникают в более чем двух символах, нельзя декодировать адрес.
В настоящем варианте осуществления диск Версии 2.0 выполнен таким образом, что он не может быть записан и воспроизведен в приводе Версии 1.0. Невозможность декодировать адрес представляет собой хороший способ сделать невозможной запись и воспроизведение диска Версии 2.0 в приводе Версии 1.0. Это связано с тем, что доступ к диску не может быть выполнен для записи и воспроизведения, если информация адреса не может быть декодирована.
В соответствии с этим запись и воспроизведение информации адреса, которая была кодирована ЕСС как единица AU адреса, которая была описана выше, выполняют путем такой обработки, как описана ниже.
Когда информацию записывают на диск Версии 2.0 в соответствии с настоящим примером, вначале выполняют кодирование коррекции ошибки информации адреса, используя то же кодирование коррекции ошибки, которое использовалось для диска Версии 1.0. Другими словами, кодирование коррекции ошибки выполняют в единицах, составляющих единицы AU адреса, которые показаны на фиг.7.
Однако информацию адреса не выделяют в ее существующей форме для BIS в основном блоке данных на фиг.8. Некоторые из девяти символов (девяти полей адреса) единицы AU адреса преобразуют. В частности, один из всех и некоторые из битов в указанных символах инвертируют. Затем данные, кодированные с коррекцией ошибок (единицы адреса), в которых были инвертированы некоторые из битов, выделяют для BIS, как показано на фиг.8, для формирования основного блока данных, который затем записывают.
В свою очередь; привод Версии 2.0 (устройство воспроизведения в соответствии с настоящим вариантом осуществления), который совместим с диском Версии 2.0, также совместим с обработкой преобразования, которая описана выше, таким образом, что привод Версии 2.0 выполняет обработку восстановления, которая противоположна обработке преобразования, в ходе которой были инвертированы биты. Например, исходное поле адреса может быть восстановлено путем повторного выполнения инверсии битов в положениях, где расположены инвертированные биты. Декодирование коррекции ошибки затем выполняют в единицах, составляющих единицы AU адреса, которые были составлены из восстановленных полей адреса.
На фиг.9 показан поток обработки адреса для случая, когда запись осуществляют на диске Версии 2.0 в настоящем примере и воспроизведение выполняют на диске Версии 2.0.
Обработка на этапах S1-S6 обозначает поток обработки вплоть до момента, когда данные записывают на диск Версии 2.0.
Обработка на этапе S1 генерирует номера (AUN0-AUN3) единичного адреса и данные флага, которые должны быть записаны.
Во время обработки на этапе S2 выполняют кодирование ЕСС. Таким образом, четыре символа проверки на четность (Parity3-Parity0) генерируют для пяти символов AUN0-AUN3 и данных флага, которые были сгенерированы во время обработки на этапе S1. Другими словами, девять символов формируют для образования единичного AU адреса.
Обработка на этапе S3 выполняет обработку преобразования для символов. Из девяти символов выполняют обработку инверсии битов на этом этапе для четырех символов AUN0, AUN1, Parity3 и Parity2. Следует отметить, что инверсия бита для символов может инвертировать все из восьми битов, которые формируют символы, и может также инвертировать только определенный поднабор битов.
В отличие от этого, обработку инверсии не выполняют для пяти символов AUN2, AUN3, битов флага, Parity1 и Parity0.
Обработку на этапе S4 выполняют для формирования полей адреса.
Таким образом, единичный AU адреса, который показан на фиг.1-1 г, сформирован путем выделения AUN0, AUN1, Parity3 и Parity2, которые были инвертированы, и AUN2, AUN3, биты флага, Parity1 и Parity0, которые не были инвертированы, в полях AF0-AF8 адреса, как показано на фиг.7-7b.
Обработку на этапе S5 выполняют для кодирования, которое формирует записанные данные (модулированные данные). В случае диска типа Blu-ray используемый способ модуляции представляет собой способ модуляции RLL (1, 7) РР (где RLL означает "с ограниченной длиной серии" и РР означает "защита проверки на четность/запрет RMTR (минимальная повторная длина серии при переходе)").
Информация адреса в модулях AU0-AU15 адреса на фиг.7 расположена в основном блоке данных, как показано на фиг.8. Поток данных, который конфигурирует основной блок данных, модулировали как RLL (1, 7), PP.
Обработка на этапе S6 выполняет запись данных на диск (диск Версии 2.0) путем облучения лучом лазера в соответствии с модулированными данными.
Обработку на этапах S1-S6, описанную выше, выполняют с использованием привода Версии 2.0 (устройство записи) в соответствии с настоящим вариантом осуществления.
Если диск представляет собой диск предназначенного для записи типа, например, обработку адресов, которая описана выше, выполняют, используя запись в приводе Версии 2.0, который представляет собой устройство записи.
Кроме того, в случае когда предполагают, что диск представляет собой диск типа, предназначенного только для воспроизведения, обработку адресов, которая описана выше, выполняют в процессе мастеринга для изготовления мастер-диска (описан ниже). В этом случае устройство мастеринга, которое будет описано ниже, используется как устройство записи, которое представляет собой привод Версии 2.0 в соответствии с настоящим вариантом осуществления.
Обработка на этапах S7-S11 представляет обработку адреса, в случае когда диск Версии 2.0, для которого была выполнена запись, описанная выше, воспроизводят в приводе Версии 2.0 (устройство воспроизведения в соответствии с настоящим вариантом осуществления).
Обработка на этапе S7 выполняет демодуляцию информации, которую считывают с диска Версии 2.0. Другими словами, демодулируют данные, модулированные RLL (1, 7) PP.
Начиная с информации адреса эта обработка позволяет получить данные для каждого из полей адреса, которые составляют единицы AU0-AU15 адреса, показанные на фиг.7-7а.
Однако обработка инверсии бита была выполнена для данных в определенных областях адреса в результате обработки преобразования на этапе S3 во время записи.
В соответствии с этим, обработка на этапе S8 выполняет обработку восстановления.
Из девяти символов, которые составляют единицу AU адреса, обработку инверсии бита на этом этапе выполняют для четырех символов AUNO, AUN1, Parity3 и Parity2. Другими словами, биты, которые были инвертированы в результате обработки на этапе S3, снова инвертируют для восстановления их в их исходные значения символов.
С другой стороны, пять символов AUN2, AUN3, биты флага, Parity1, и Parity0 не были инвертированы в результате обработки на этапе S3 таким образом, что обработка инверсии бита на этом этапе для них не выполняется.
Обработка восстановления позволяет получить данные для исходных полей адреса.
Обработка на этапе S9 позволяет получить AUN0-AUN3 данные флага и Parity0-Parity3 как данные для восстановленных полей адреса. Другими словами, она формирует девять символов единицы AU адреса.
Обработка на этапе S10 выполняет декодирование коррекции ошибки для единицы AU адреса. В этом случае выполняют декодирование коррекции ошибки данных для единицы адреса, которая была кодирована ЕСС при обработке на этапе S2 и была восстановлена в результате обработки восстановления на этапе S8. Поэтому выполняют нормальное декодирование коррекции ошибки и информацию адреса (AUN0-AUN3) правильно декодируют при обработке на этапе S11.
Это позволяет соответствующим образом считывать адреса в данных с помощью привода Версии 2.0 во время воспроизведения диска Версии 2.0. Поэтому обычный доступ для воспроизведения и доступ для записи могут быть выполнены, используя адреса в данных таким образом, что операция воспроизведения и операция записи могут быть выполнены правильно.
С другой стороны, обработка на этапах S7 и S12-S14 представляет обработку адреса в случае, когда диск Версии 2.0, для которого была выполнена запись, описанная выше, воспроизводят в приводе Версии 1.0 (известное устройство воспроизведения).
При обработке на этапе S7 выполняют демодуляцию информации, считанную с диска Версии 2.0. Другими словами, демодулируют данные, модулированные RLL (1, 7) PP.
Начиная с информации адреса, которая была получена таким образом, обработка на этапе S12 позволяет получить данные для каждого из полей адреса, которые составляют единицы AU0-AU15 адреса на фиг.7-7а. Однако обработка инверсии бита была выполнена для данных в определенных полях адреса (поля адреса, которые соответствуют AUN0, AUN1, Parity3 и Parity2) в результате обработки преобразования на этапе S3 во время записи. Инвертированные данные в каждом из полей адреса затем подают для декодирования коррекции ошибки при обработке на этапе S13.
Когда выполняют декодирование коррекции ошибки для каждой из единиц AU адреса, некоторые из данных в полях адреса, которые составляют единицы AU адреса, имеют значения, которые отличаются от тех, которые были при выполнении кодирования ЕСС (при обработке на этапе S2). В случае единицы AU0 адреса поля AF2,0, AF3,0, AF5,0 адреса и AF6,0, которые соответствуют AUN0, у AUN1, Parity3 и Parity2, имеют значения символа, которые представляют собой результат инверсии бита, выполненной при обработке преобразования.
Хотя модуль AU адреса обладает возможностью коррекции ошибок вплоть до двух символов, как было описано выше, в данном случае существует состояние, в котором ошибки возникли в четырех символах.
Поэтому результат коррекции ошибки состоит в неудачном декодировании (DF), неудачной коррекции ошибок.
Другими словами, информация (AUN0-AUN3) адреса не может быть правильно декодирована при обработке на этапе S14.
Таким образом, во время воспроизведения диска Версии. 2.0 с использованием привода Версии 1.0, адреса в данных не могут быть считаны правильно. Поэтому обычный доступ для воспроизведения и доступ для записи не могут быть выполнены, поэтому выполняется обработка ошибки и операцию воспроизведения и операцию записи не начинают.
Другими словами, становится возможным сделать невозможными запись и воспроизведение диска Версии 2.0 в приводе Версии 1.0.
В случае диска Версии 2.0, предназначенного только для воспроизведения типа, канавки не существуют, поэтому невозможность считывать адреса в данных, как описано выше, позволяет сделать невозможным воспроизведение этого диска в приводе Версии 1.0.
В случае диска Версии 2.0, предназначенного для записи типа, даже при том что адреса в данных нельзя считать, запись и воспроизведение возможны, поскольку могут быть считаны адреса в качаниях. Поэтому адреса в качаниях также делают нечитаемыми с помощью привода Версии 1.0, как будет описано ниже.
Следует отметить, что в примере по фиг.9 при обработке преобразования на этапе S3 инверсию бита выполняют для четырех символов среди девяти символов, которые составляют единицу AU адреса. В настоящем примере возможность коррекции единицы AU адреса такова, что ошибки в более чем двух символах не могут быть скорректированы, поэтому при обработке на этапе S3 достаточно, чтобы обработка инверсии бита была выполнена, по меньшей мере, для трех символов.
Кроме того, в случае когда инверсию бита выполняют для четырех символов, например, цель обработки не ограничивается AUNO, AUN1, Parity3 и Parity2. Однако, как и в настоящем примере, считается, что желательно, чтобы символы информации адреса и два символа четности были использованы для исключения смещения. Конечно, в случае когда выполняют обработку инверсии для четырех символов, можно рассмотреть пример, в котором обработку инверсии выполняют для четырех символов в адресе, пример, в котором обработку инверсии выполняют для битов флага и т.п.
Кроме того, для информации адреса считается целесообразным, чтобы инверсия бита была выполнена для символов нижнего порядка. Это связано с тем, что существуют приводы, которые не выполняют декодирование ЕСС адресов, и в приводах такого типа не выполняют последовательное приращение адресов, поэтому могут возникнуть ошибки.
Конечно, также возможно рассмотреть пример, в котором символы AUN2, AUN3 более высокого порядка в информации адреса представляют собой объекты инверсии.
3. Запись и воспроизведение адреса в качаниях
Далее поясняется запись и воспроизведение адреса в качаниях на диске (диске Версии 2.0) в настоящем примере.
На фиг.10-10а и 10b показаны структуры адресов в качаниях на диске Версии 1.0 и на диске Версии 2.0 (диск в соответствии с настоящим вариантом осуществления).
Вначале, как показано на фиг.10-10а, адрес в качаниях на диске Версии 1.0 формируют из 24 битов А0-А23. Следует отметить, что в адресе в качаниях четыре бита обрабатывают как один символ, но четырехбитный символ ниже называется полубайтом. 24-битный адрес в качаниях включает в себя шесть полубайтов.
Два бита А0, А1 затем представляют собой число в кластере.
Девятнадцать битов А2-А20 представляют адрес кластера.
Три бита А21-А23 представляют собой количество слоев.
В отличие от этого структура адреса в качаниях в случае диска Версии 2.0 является такой же, как показано на фиг.10-10b.
Среди битов А0-А23 в шести полубайтах, два бита А0, А1 представляют собой числа в кластере.
Двадцать битов А2-А21 представляют собой адрес кластера. Количество битов адресов кластера было увеличено до двадцати в соответствии с увеличением общего количества кластеров, что связано с увеличением емкости.
Два бита А22-А23 представляют собой номер слоя.
В настоящем примере три адреса включены в адреса ADIP для записи единичных блоков (RUB) записи и воспроизведения кластера, которые представляют собой единицу записываемых данных.
На фиг.11 показан RUB. RUB (кластер записи и воспроизведения), который представляет собой единицу записи и воспроизведения, выполнен из 498 фреймов, которые включают в себя 496 фреймов блока ЕСС, и данные, которые показаны на фиг.5-5а, плюс две области связей из одного фрейма, каждая из которых прикреплена вначале и в конце для PLL и т.п. Как показано на фиг.11-11а, три блока адреса ADIP содержатся на интервале, который соответствует одному RUB. Один блок адреса сформирован из 83 битов.
На фиг.11-11b показана конфигурация одного блока адреса. 83-битовый блок адреса включает в себя восьмибитовую часть синхронизации (часть сигнала синхронизации) и 75-битную часть данных.
Восемь битов части синхронизации разделены на четыре блока синхронизации, каждый из которых сформирован из монотонного бита (один бит) и бита синхронизации (один бит).
75 битов части данных разделены на пятнадцать блоков ADIP, каждый из которых сформирован из монотонного бита (один бит) и битов ADIP (четыре бита).
Монотонные биты, биты синхронизации и биты ADIP сформированы в качаниях на интервалах из 56 качаний. Метка минимальной манипуляции (MSK) помещена в начале каждого из битов для синхронизации битов.
В каждом из монотонных битов после метки MSK следует последовательность качаний, которые сформированы последовательно в соответствии с несущей частотой. В бите синхронизации и в каждом из битов ADIP после метки MSK следуют качания, которые сформированы в соответствии с формой колебания модуляции MSK и формой колебаний модуляции пилообразных качаний (STW).
Информация адреса записана с использованием шестидесяти битов, которые состоят из пятнадцати блоков битов ADIP (четыре бита) в части данных.
Формат адреса (структура блока коррекции ошибок), который сформирован из шестидесяти битов, показан на фиг.12. Модуль ЕСС, который используется как данные адреса, таким образом, представляет собой модуль из, в сумме, шестидесяти битов, составленных из пятнадцати полубайтов: полубайт 0 - полубайт 14 (один полубайт имеет четыре бита), как показано на фиг.12. Структура блока коррекции ошибок включает в себя девять полубайтов (36 битов) данных с шестью полубайтами (24 бита) информации четности, прикрепленной к ним.
В пределах девяти полубайтов (36 битов) данных шесть полубайтов (24 бита): полубайт 0 - полубайт 5, используются как информация адреса ADIP, то есть как 24 битный адрес качаний, который показан на фиг.10.
Три полубайта (12 битов): полубайт 6 - полубайт 8, используются как вспомогательные данных, такие как ID диска и т.п., в которых содержатся условия записи, такие как мощность лазера при записи и воспроизведении.
24 бита, полубайт 9 - полубайт 14, используются для проверки на четность.
Способ коррекции ошибок представляет собой код Рида-Соломона на основе полубайтов с RS (15, 9, 7), для которых один полубайт имеет четыре бита. Другими словами, длина кодового слова составляет 15 полубайт, длина данных составляет девять полубайт, и длина проверки на четность составляет шесть полубайт.
На фиг.12 полубайт 0 - полубайт 5 включают в себя три бита для адреса слоя, двадцать битов для номера RUB (адреса кластера) и два бита для номера адреса (адреса в кластере), но этот формат предназначен для диска Версии 1.0, который показан на фиг.10-10а.
Для диска Версии 2.0, который показан на фиг.10-10b, соответствующие 24 бита состоят из двух битов для адреса слоя, 21 бита для номера RUB (адреса кластера), и двух битов для номера адреса (адреса внутри кластера).
На фиг.13 показан поток обработки адреса в случае, когда...
Поток обработки адреса в случае, когда запись выполняют для диска Версии. 2.0 в настоящем примере и воспроизведение выполняют для диска Версии 2.0, показан на фиг.13.
Обработка на этапах S20-S21 обозначает поток обработки вплоть до момента записи адресов в качаниях на диске Версии 2.0. Следует отметить, что то, что называется записью адресов в качаниях, возникает, когда канавки качания сформированы в процессе мастеринга для мастер-диска. Поэтому устройство записи в данном случае представляет собой устройство мастеринга.
Обработка на этапе S20 генерирует данные адреса, которые должны быть записаны. Другими словами, генерируют 24 бита (шесть полубайтов) для адресов в качаниях, как показано на фиг.10-10b.
При обработке на этапе S21 выполняют кодирование ЕСС. Таким образом, три полубайта вспомогательных данных и шесть полубайтов информации проверки на четность генерируют для шести полубайтов адресов качаний, которые были сгенерированы при обработке на этапе S20. Другими словами, формируют данные, кодированные с использованием коррекции ошибок, имеющие структуру, показанную на фиг.12.
При обработке на этапе S22 выполняют обработку преобразования для полубайтов.
Данные, кодированные с коррекцией ошибок, как показано на фиг.2, включают в себя пятнадцать полубайтов (полубайт 14 - полубайт 0). Обработку инверсии битов выполняют для полубайтов в определенных положениях в пределах пятнадцати полубайтов. Следует отметить, что инверсия бита для любого из полубайтов позволяет инвертировать все четыре бита в полубайте и также может инвертировать только определенный поднабор битов.
На фиг.13 на этапе S22 представлено число "11110010000100".
Здесь 1 обозначает, что обработка инверсии бита будет выполнена, и 0 обозначает, что обработка инверсии бита не будет выполнена, и каждое из положений соответствует одному из пятнадцати полубайтов.
Другими словами, "11110010000100" показывает, будет или нет обработка инверсии бита выполнена для каждого из пятнадцати полубайтов (полубайт 14 - полубайт 0).
В этом случае обработка инверсии бита будет выполнена для полубайта 14, полубайта 13, полубайта 12, полубайта 11, полубайта 7 и полубайта 2, которые соответствуют единицам, и обработка инверсии бита не будет выполнена для других полубайтов.
Запись на диск выполняют при обработке на этапе S23. В этом случае мастеринг (нарезку мастер-диска) выполняют на основе информации ADIP после обработки на этапе S22, и формирование волнистых качающихся канавок (в результате экспонирования светом) в мастер-диске выполняют на основе модулированного сигнала информации ADIP.
После этого выполняют проявление изображения мастер-диска, формирование штампа и изготовление диска, используя штамп, хотя это будет описано ниже.
Изготовленный диск представляет собой диск, предназначенный для записи, такой как диск Версии 2.0.
На этапах S24-S26 показана обработка адреса, которую выполняют для диска Версии 2.0, на котором были сформированы канавки качаний, как описано выше, когда выполняют одну из записи и воспроизведения для привода Версии 2.0 (устройство записи и воспроизведения в соответствии с настоящим вариантом осуществления).
При обработке на этапе S24 выполняют обработку восстановления информации, которая была считана из качающихся канавок диска Версии 2.0.
Обработку восстановления выполняют, поскольку обработка инверсии бита была выполнена в результате обработки преобразования на этапе S22 во время мастеринга для данных в указанных полубайтах в информации ADIP.
Здесь также "11110010000100" показано на этапе S24.
Таким же образом, как описано выше, 1 обозначает, что обработка инверсии бита будет выполнена, и 0 обозначает, что обработка инверсии бита не будет выполнена в каждым из положений, соответствующих одному из пятнадцати полубайтов. Поэтому таким же образом, как и при обработке на этапе S22, обработка инверсии бита будет выполнена для полубайта 14, полубайта 13, полубайта 12, полубайта 11, полубайта 7 и полубайта 2, которые соответствуют единицам, и обработка инверсии бита не будет выполнена для других полубайтов.
В результате этого формируется информация ADIP, которая показана на фиг.12 как данные, кодированные с коррекцией ошибки в момент времени, когда кодирование ЕСС было выполнено во время мастеринга при обработке на этапе S21.
При обработке на этапе S25 выполняют декодирование коррекции ошибки для информации ADIP (данные, кодированные с коррекцией ошибки в 60-битных единичных модулях на фиг.12). В этом случае выполняют декодирование коррекции ошибки данных для информации ADIP, которые были кодированы ЕСС при обработке на этапе S21 и были восстановлены в результате обработки восстановления на этапе S24 таким образом, что информация адреса в качаниях (А0-А23 на фиг.10-10b) будет правильно декодирована.
Адреса в качаниях могут быть, таким образом, правильно считаны во время записи и воспроизведения диска Версии 2.0 с помощью привода Версии 2.0. Поэтому обычный доступ для воспроизведения и доступ для записи могут быть выполнены с использованием адресов качаний, так что операция воспроизведения и операция записи могут быть выполнены правильно.
С другой стороны, обработка на этапах S27-S29 показывает обработку адреса в случае, когда диск Версии 2.0, для которого были сформированы канавки качания, как описано выше, записывают и воспроизводят в приводе Версии 1.0 (известное устройство воспроизведения).
При обработке на этапе S27 выполняют обработку инверсии битов для информации, которая была считана из канавок качаний для диска Версии 2.0.
Однако обработка не является тем, что называют обработкой восстановления в настоящем примере, которая представляет собой противоположность обработке преобразования на этапе S22, но скорее представляет собой обработку, которую выполняют с помощью известного устройства записи и воспроизведения.
Что касается обработки адреса в соответствии с канавками качания, обработку, которая инвертирует шесть полубайтов среди пятнадцати полубайтов, выполняют во время мастеринга и когда считывают адреса в качаниях.
Это выполняют для того, чтобы исключить случай, в котором результат коррекции ошибки неправильно считают положительным, если информация ADIP, которую вводят в обработку декодирования ЕСС, будет вся равна нулям, как и тогда, когда, например, информацию адреса не подают.
Для диска Версии 1.0, как показано на фиг.13, инверсия для пятнадцати полубайтов описана как "000000000111111" (инверсия полубайта 5 - полубайта 0) и ее выполняют во время мастеринга и когда считывают адреса в качаниях.
Когда информацию адреса декодируют с помощью привода Версии 1.0, обработку инверсии такого вида выполняют, как обработку на этапе S27. Затем обработку декодирования ЕСС выполняют, как обработку на этапе S28 для информации адреса, для которой была выполнена обработка инверсии.
В этот момент для диска Версии 2.0, была выполнена обработка инверсии бита "11110010000100" в результате обработки преобразования на этапе S22.
Поэтому информация ADIP, которая предусмотрена для декодирования ЕСС, находится в состоянии "111100010111011", поскольку обработка инверсии со структурой "000000000111111" на этапе S27 была добавлена к результату обработки инверсии "11110010000100" на этапе S22.
Другими словами, информация ADIP, которая была кодирована ЕСС в результате обработки на этапе S21, находится в состоянии, в котором полубайт 14, полубайт 13, полубайт 12, полубайт 11, полубайт 7, полубайт 5, полубайт 4, полубайт 3, полубайт 1 и полубайт 0 были инвертированы.
Декодирование коррекции ошибки не может быть выполнено для этого вида информации ADIP, поэтому результат коррекции ошибки представляет собой неправильное декодирование (DF), неправильную коррекцию ошибок.
Другими словами, адреса (А0-А23) качаний не могут быть правильно декодированы при обработке на этапе S29.
Таким образом, во время записи и воспроизведения диска Версии 2.0, используя привод Версии 1.0, адреса в качаниях в данных не могут быть считаны правильно. Поэтому обычный доступ воспроизведения и доступ записи не могут быть выполнены, поэтому выполняют обработку ошибки и операцию воспроизведения и операцию записи не начинают. Другими словами, становится возможным сделать невозможной запись и воспроизведение диска Версии. 2.0 на приводе Версии 1.0.
Следует отметить, что, как описано выше, адреса в данных диска Версии 2.0 также не могут быть считаны с помощью привода Версии 1.0.
В случае диска, предназначенного для записи типа, если запись основных данных была закончена и если адреса в данных могут быть считаны, воспроизведение может быть возможным, даже если адреса в качаниях не могут быть считаны. Однако если сделать так, что ни адреса в качаниях, ни адреса в данных не могут быть считаны, становится возможным сделать совершенно невозможным для привода Версии 1.0 выполнять запись и воспроизведение с использованием диска Версии 2.0, предназначенного для записи.
В частности, при обработке преобразования на этапе S22 и при обработке восстановления на этапе S24 выполняют инверсию пятнадцати полубайтов (полубайт 14 - полубайт 0) в соответствии с положениями "11110010000100".
Такие положения инверсии полубайтов были выбраны так, чтобы коррекция ошибки определенно не могла быть выполнена в приводе Версии 1.0.
Во время воспроизведения данные не всегда воспроизводятся правильно, и это является основной причиной выполнения коррекции ошибок.
В связи с этим даже если обработка инверсии бита будет выполнена как обработка преобразования, данные иногда находятся в неинвертированном состоянии, из-за ошибки декодирования. Это означает, что в зависимости от типа возникновения ошибки декодирования существует вероятность того, что результат коррекции ошибки будет ОК (в порядке) в приводе Версии 1.0 несмотря на тот факт, что была выполнена обработка преобразования. Такое случается, поскольку преобразование участка данных в результате инверсии битов не будет выполнено из-за ошибки декодирования.
Поэтому необходимо соответствующим образом выбирать обработку преобразования таким образом, чтобы ошибка декодирования определенно возникала в приводе Версии 1.0, даже если возникла ошибка декодирования. В этом случае адреса в качаниях положения полубайтов, для которых была выполнена инверсия бита, являются существенными.
Информацию ADIP, как описано со ссылкой на фиг.12, корректируют на основе полубайтов RS (15, 9, 7) с символом, использующим девять полубайтов, и информацией проверки на четность с использованием шести полубайтов, из которых три полубайта могут быть скорректированы.
Даже если ошибки декодирования возникают в трех полубайтах, проблема не возникает, если DF (неспособность корректировать ошибку) может возникнуть в приводе Версии 1.0.
Другими словами, не возникают какое-либо проблемы, если структура такого рода может быть найдена как структура положений инверсии в пятнадцати полубайтах.
В соответствии с этим положения инверсии были установлены путем определения вначале всех структур, которые можно было рассмотреть как структуры инверсии для пятнадцати полубайтов, с последующей проверкой для всех структур положения инверсии независимо от того, возникает или нет невозможность коррекции ошибки в случае, когда возникла ошибка при декодировании бита.
В случае, когда одиночная ошибка (ошибка декодирования бита) возникает среди положений инверсии в пятнадцати полубайтах, структура возникновения ошибки будет одной из пятнадцати структур. При этом можно обеспечить невозможность коррекции ошибок в приводе Версии 1.0 для всех пятнадцати структур, когда возникает одна ошибка.
Существуют 1575 возможных структур, когда возникают две ошибки, и при этом также можно обеспечить возникновение невозможности коррекции ошибки для всех этих структур.
Однако когда проверку выполняют для 102375 структур, которые возможны, когда возникает три ошибки, также можно обеспечить невозможность коррекции ошибки только для 95717 структур, и результат коррекции ошибки ОК будет получен для оставшихся 6658 структур. Другими словами, вероятность того, что коррекция ошибки невозможна, падает до уровня приблизительно 95%.
Таким образом, для общего количества 103965 структур ошибок невозможность коррекции ошибки возникает для 97307 структур, и результат коррекции ошибки ОК будет получен для оставшихся структур.
Другими словами, когда возникают более чем две ошибки, трудно надежно обеспечить невозможность коррекции ошибки. Однако детектирование последовательности адреса также обычно используют при декодировании адреса.
Например, если предположить, что значения 00, 01, 02 и т.п. адреса определены как последовательные, тогда даже если заданное значение адреса будет декодировано, возникает ошибка в адресе, если значение не является последовательным со значениями, которые предшествуют ему и следуют за ним. Например, в случае непоследовательности значений, таких как 00, 01, 85, возникает ошибка для значения 85 адреса, даже если результат коррекции ошибки будет ОК.
Поскольку детектирование последовательности адресов обычно выполняют, даже в приводе Версии 1.0, в конечном итоге не возникает проблема, если только ошибка в адресе будет получена как результат детектирования последовательности, даже если результат коррекции ошибки будет ОК.
Поэтому целесообразно выбрать структуру для положений инверсии для пятнадцати полубайтов, которые образуют большую часть случаев невозможности коррекции ошибок.
В конечном итоге определили, что шестнадцать структур (1)-(16), которые показаны на фиг.14, представляют собой структуры, которые позволяют обеспечить большую часть случаев невозможности коррекции ошибок в приводе Версии 1.0. ("1" обозначает, что полубайт был инвертирован).
Эти шестнадцать структур имеют наибольшую вероятность получения невозможности коррекции ошибки в отношении возникновения различных типов декодирования ошибок, когда выполняют обработку декодирования ЕСС с помощью привода Версии 1.0 в состоянии, в котором инверсия была применена для данных в пятнадцати ЕСС кодированных полубайтах.
В примере, который показан на фиг.13, используется структура (16), "111100010111011".
Как описано выше, обработку инверсии со структурой "000000000111111" выполняют с помощью привода Версии 1.0 как обработку на этапе S27. Поэтому для выполнения декодирования ЕСС с данными в состоянии, которые были инвертированы в соответствии со структурой (16), "111100010111011", инверсия в соответствии со структурой "11110010000100", которую получают в результате операции исключающее "ИЛИ" по структурам "111100010111011" и "000000000111111", может быть применена заранее. Другими словами, выполнение обработки инверсии бита на этапе S22 для полубайтов, положения которых обозначены единицами в структуре "11110010000100", позволяет надежно создать состояние в приводе Версии 1.0, в котором невозможна запись и воспроизведение из-за ошибок в адресе, даже в случае возникновения ошибки декодирования.
Следует отметить, что структуры (1)-(15) на фиг.14 также можно использовать. Таким образом, структура, которая получается в результате операции исключающее "ИЛИ" по любой одной из структур (1)-(15) и "000000000111111", может использоваться как структура для обработки инверсии битов на этапе S22.
В этих случаях также возможно надежно формировать состояние в приводе Версии 1.0, в котором запись и воспроизведение невозможны.
4. Устройство привода диска
Конфигурация устройства привода диска (привод Версии 2.0), который представляет собой вариант осуществления устройства записи и устройства воспроизведения в соответствии с настоящим изобретением, показана на фиг.15. Другими словами, это устройство привода диска выполняет обработку на этапах S1-S6 на фиг.9 во время записи, и во время воспроизведения, выполняет обработку на этапах S7-S11 на фиг.9 и обработку на этапах - S24-S26 на фиг.13.
Диск 100 (диск Версии 2.0) помещают на поворотный стол, который не показан на чертежах, и во время операций записи и воспроизведения приводят во вращение с постоянной линейной скоростью (CLV) с помощью двигателя 2 шпинделя.
В случае когда диск 100 представляет собой диск типа, пригодного для записи, информацию ADIP, которая внедрена в форме качаний в дорожках в виде канавок на диске 100, считывают с помощью блока 1 оптической головки.
Во время записи основные данные записывают в дорожках с помощью блока 1 оптической головки в форме либо меток с изменением фазы, либо в виде меток изменения пигмента, и во время воспроизведения записанные метки (данные пользователя, адреса в данных и т.п.) считывают с помощью блока 1 оптической головки.
В случае когда диск 100 представляет собой диск типа, предназначенного только для воспроизведения, данные пользователя, адреса в данных и т.п. считывают из дорожек с помощью блока 1 оптической головки в форме рядов рельефных углублений на диске 100.
Лазерный диод, который используется как источник лазерного луча, фотодетектор для детектирования отраженного луча, полевая линза на выходной стороне луча лазера и оптическая система (не показана на чертежах), которая направляет луч лазера через полевую линзу на поверхность записи диска и которая направляет отраженный луч в фотодетектор, предусмотрены в блоке 1 оптической головки. Лазерный диод выводит то, что называется светом синего лазера, который имеет длину волны 405 нанометров. NA оптической системы составляет 0,85.
Полевая линза удерживается в блоке 1 оптической головки с помощью двухосевого механизма, таким образом, что ее можно перемещать в направление дорожки и в направлении фокусирования.
Кроме того, весь блок 1 оптического головки можно перемещать в радиальном направлении диска с помощью механизма 3 салазок.
Лазерным диодом в блоке 1 оптической головки управляют для излучения лазерного луча с использованием сигнала управления (ток возбуждения) от привода 13 лазера.
Информацию луча, отраженного от диска 100, детектируют с помощью фотодетектора, преобразуют в электрический сигнал в соответствии с количеством полученного света, и подают в схему 4 матрицы.
Схема преобразования ток-напряжение, схема расчета/усиления матрицы и т.п. предусмотрены в схеме 4 матрицы, и требуемые сигналы генерируют с помощью обработки расчета матрицы в ответ на выходное напряжение из множества элементов приема света, которые используются как фотодетектор.
Например, генерируют высокочастотный сигнал (сигнал данных воспроизведения), который соответствует данным воспроизведения, сигнал ошибки фокусирования для сервоуправления, сигнал ошибки отслеживания дорожки и т.п.
Двухтактный сигнал также генерируют как сигнал, который относится к качаниям канавок, то есть как сигнал детектирования качания.
Сигнал данных воспроизведения, который выводят из схемы 4 матрицы, подают в схему 5 считывания/записи, сигнал ошибки фокусирования и сигнал ошибки отслеживания дорожки подают в схему 11 сервоуправления и двухтактный сигнал подают в схему качания.
При выполнении обработки преобразования в двоичную форму для сигнала данных воспроизведения, обработки генерирования тактовой частоты воспроизведения с использованием PLL и т.п. схема 5 считывания/записи воспроизводит данные, которые были считаны блоком 1 оптической головки, затем подает эти данные в схему 6 модуляции/демодуляции. В схеме 6 модуляции/демодуляции предусмотрен функциональный участок, который используется декодером во время воспроизведения, и функциональный участок, который используется как кодер во время записи.
Во время воспроизведения выполняют обработку демодуляции как обработку декодирования в отношении модуляции RLL (1, 7) РР на основе тактовой частоты воспроизведения.
Кодер/декодер 7 ЕСС выполняет обработку кодирования ЕСС, которая прикрепляет коды коррекции ошибки во время записи, и обработку декодирования ЕСС, которая выполняет коррекцию ошибок во время воспроизведения.
Во время воспроизведения данные, которые были демодулированы схемой 6 модуляции/демодуляции, отбирают во внутреннее запоминающее устройство и данные воспроизведения формируют путем выполнения обработки детектирования /коррекции ошибки, устранения перемежения и т.п.
Данные, которые были декодированы в данные воспроизведения с помощью кодера/декодера 7 ЕСС, считывают на основе команды из системного контроллера 10 и передают в аудиовизуальную (AV) систему 20.
Кроме того, адреса в данных (AUN0-AUN3), которые были декодированы кодером/декодером 7 ЕСС, подают в системный контроллер 10 и используют для обработки доступа и т.п.
Двухтактный сигнал, который выводят из схемы 4 матрицы как сигнал, который относится к качаниям в канавках, обрабатывают с помощью схемы 8 качаний. Двухтактный сигнал используется как информация ADIP, и для него выполняют демодуляцию MSK и демодуляцию STW в схеме 8 качаний так, что он становится демодулированным в виде потока данных, который образует адреса ADIP, и который подают в декодер 9 адреса.
Декодер 9 адреса формирует значения адреса для адресов качаний путем выполнения декодирования подаваемых в него данных, затем подает эти значения адреса в системный контроллер 10.
Декодер 9 адреса также выполняет обработку PLL, используя сигнал качаний, который подают с помощью схемы 8 качаний для генерирования сигнала тактовой частоты, который подают в различные участки для использования, например, в качестве сигнала тактовой частоты кодирования во время записи.
Во время записи данные записи передают из AV системы 20, но данные записи накапливают в буфере путем передачи в запоминающее устройство в кодере/декодере 7 ЕСС.
В этом случае кодер/декодер 7 ЕСС выполняет прикрепление кодов коррекции ошибки путем прикрепления кодов перемежения, подкодов и т.п. в качестве обработки кодирования для помещенных в буфер данных записи.
Данные, кодированные ЕСС, модулируют с помощью RLL (1, 7) РР в схеме 6 модуляции/демодуляции и подают в схему 5 считывания/записи.
Сигнал тактовой частоты, генерируемый из сигнала качаний, как описано выше, используют как сигнал тактовой частоты кодирования, который используется как опорный сигнал тактовой частоты для обработки кодирования данных во время записи.
Данные записи, генерируемые в процессе кодирования, передают, как импульсы света лазера, в привод 13 лазера после того, как схема 5 считывания/записи выполнит обработку компенсации записи, которая включает в себя тонкую настройку оптимальной мощности записи, регулирование формы колебаний импульса возбуждения лазера и т.п., с учетом характеристик слоя записи, формы пятна лазерного луча, линейной скорости записи и т.п.
Привод 13 лазера выполняет возбуждение излучения лазерного луча путем передачи поданного в него импульса возбуждения лазера в лазерный диод в блоке 1 оптической головки. В результате на диске 100 формируются метки в соответствии с данными записи.
Следует отметить, что в приводе 13 лазера предусмотрено то, что называется схемой автоматического управления мощностью (АРС), которая отслеживает выходную мощность лазера на основе выхода из детектора монитора мощности лазера, который предусмотрен в блоке 1 оптической головки и удерживает выход лазера постоянным независимо от выходной температуры лазера и т.п. Целевые значения для выхода лазера во время записи и во время воспроизведения предоставляются системным контроллером 10, при этом уровнями выхода лазера во время записи и во время воспроизведения управляют таким образом, чтобы были достигнуты соответствующие целевые значения.
Схема 11 сервоуправления выполняет операции сервоуправления путем генерирования различных типов сигналов привода сервоуправления для фокусирования для отслеживания дорожек и перемещения салазок на основе сигнала ошибки фокусирования и сигнала ошибки отслеживания дорожки из схемы 4 матрицы.
Другими словами, схема 11 сервоуправления генерирует сигнал управления фокусом и сигнал управления отслеживанием в соответствии с сигналом ошибки фокусирования и сигнал ошибки отслеживания, который, в свою очередь, выполняет привод катушки фокусирования и катушки отслеживания дорожки в двухосевом механизме блока 1 оптической головки. Таким образом, формируется контур сервоуправления отслеживанием дорожки и контур сервоуправления фокусирования в блоке 1 оптической головки, схеме 4 матрицы, в схеме 11 сервоуправления и в двухосевом механизме.
Схема 11 сервоуправления также выполняет операцию перехода дорожки в соответствии с командой перехода дорожки из системного контроллера 10 путем отключения контура сервоуправления отслеживанием дорожки и выхода сигнала привода перехода.
Схема 11 сервоуправления также осуществляет управление механизмом 3 салазок, генерируя сигнал привода салазок на основе сигнала ошибки салазок, который формируется как компонент низкой частоты сигнала ошибки отслеживания дорожки, а также на основе управления исполнением доступа из системного контроллера 10 и т.п. Механизм 3 салазок включает в себя механизм, не показанный на чертежах, который выполнен из основной оси, на которой установлен блок 1 оптической головки, двигателя салазок, зубчатой передачи и т.п., и этот механизм выполняет скользящее движение блока 1 оптической головки путем привода двигателя салазок в соответствии с сигналом управления салазками.
Схема 12 сервопривода шпинделя выполняет управление, которое обеспечивает вращение двигателя 2 шпинделя с постоянной линейной скоростью.
Схема 12 сервопривода шпинделя генерирует сигнал ошибки шпинделя, используя сигналы тактовой частоты, генерируемые при PLL обработке сигнала качаний, используя сигналы тактовой частоты как информацию о текущей скорости вращения двигателя 2 шпинделя и сравнивая этот сигнал тактовой частоты с установленной информацией об опорной скорости CLV.
Во время воспроизведения данных сигнал ошибки шпинделя также может быть сгенерирован, используя сигнал тактовой частоты воспроизведения, который генерируется в результате PLL в схеме 5 считывания/записи (сигнал тактовой частоты, который используется как опорный для обработки декодирования), который также используется как информация о текущей скорости вращения двигателя 2 шпинделя, и сравнения сигнала тактовой частоты воспроизведения с указанной информацией опорной скорости CLV. Схема 12 сервопривода шпинделем также выводит сигнал управления шпинделем, который генерируется в соответствии с сигналом ошибки шпинделя и обеспечивает вращение двигателя 2 шпинделя с постоянной линейной скоростью.
Схема 12 сервопривода шпинделем также генерирует сигнал привода шпинделя в соответствии с сигналом управления ускорением/замедлением шпинделя из системного контроллера 10, причем сигнал управления шпинделем обеспечивает выполнение двигателем 2 шпинделя таких операций, как запуск, остановка, ускорение, замедление и т.п.
Различными типами операций системы сервоуправления и системы записи и воспроизведения, которые описаны выше, управляют с помощью системного контроллера 10, который выполнен на основе микропроцессора.
Системный контроллер 10 выполняет различные типы обработки в соответствии с командами из AV системы 20.
Например, когда AV система 20 выводит команду записи, системный контроллер 10 вначале перемещает блок 1 оптической головки по адресу, где должна быть выполнена запись. Затем кодер/декодер 7 ЕСС использует схему 6 модуляции/демодуляции для выполнения ранее описанной обработки кодирования для данных, переданных из AV системы 20 (например, видеоданных, аудиоданных и т.п. в форматах различных типов, таких как MPEG2 и т.п.). Затем выполняют запись, как описано выше, путем подачи импульса привода лазера из схемы 5 считывания/записи в привод 13 лазера.
Кроме того, в случае когда команда считывания, например, поступает из AV системы 20 и она требует передачи определенных данных, которые записаны на участке 10 носителя данных (видеоданные MPEG2 или тому подобное), вначале выполняют управление операцией поиска, для которой обозначенный адрес является целевым. Таким образом, команду выводят в схему 11 сервоуправления, обеспечивая выполнение блоком 1 оптической головки операции доступа, для которой цель представляет собой адрес, который обозначен командой поиска дорожки.
После этого выполняют управление операцией, которая необходима для передачи данных в обозначенный интервал данных в AV системе 20. Другими словами, считывание данных с диска 100, декодирование, размещение в буфере и т.п. выполняют в схеме 5 считывания/записи, в схеме 6 модуляции/демодуляции и в кодере/декодере 7 ЕСС и передают запрашиваемые данные.
Следует отметить, что во время записи и воспроизведения данных системный контроллер 10 выполняет управление доступом и операциями записи и воспроизведения путем использования адресов качаний, которые были детектированы схемой 8 качаний и декодером 9 адреса, а также адреса данных, которые были получены с помощью кодера/декодера 7 ЕСС.
В этом случае кодер/декодер 7 ЕСС выполняет обработку на этапах S1-S4 на фиг.9 во время записи.
Таким образом, при обработке на этапе S1 кодер/декодер 7 ЕСС генерирует номера единиц адреса (AUN0-AUN3) и данные флага для записи адресов в данных. Затем при обработке на этапе S2 кодер/декодер 7 ЕСС выполняет кодирование ЕСС. Четыре символа проверки на четность (Parity0-Parity3) генерируют для пяти символов, которые содержат AUN0-AUN3 и данные флага.
Затем кодер/декодер 7 ЕСС выполняет обработку инверсии битов как обработку преобразования на этапе S3 для четырех символов AUNO, AUN1, Parity3 и Parity2. Символы, которые представляют собой результат обработки инверсии, используют для формирования полей адреса, которые используются как блок кодирования ЕСС.
Данные, кодированные ЕСС, подают в схему 6 модуляции/демодуляции, где их модулируют как RLL (1, 7) РР в результате обработки на этапе S5. Затем в ходе обработки на этапе S6 выполняют запись данных, используя схему 5 считывания/записи и привод 13 лазера для возбуждения излучения луча лазера на основе модулированного сигнала.
Кроме того, кодер/декодер 7 ЕСС выполняет обработку на этапах S8-S11 на фиг.9 во время воспроизведения.
Информацию, которую считывают с диска 100, демодулируют с помощью схемы 4 матрицы, схемы 5 считывания/записи и схемы 6 модуляции/демодуляции, как описано выше (этап S7).
Таким образом, что касается информации адреса, данные в разных полях адреса, которые составляют единицы AU0-AU15 адреса на фиг.7-7а, получают и передают в кодер/декодер 7 ЕСС.
Однако поскольку обработка инверсии бита была выполнена для данных в указанных полях адреса в результате обработки преобразования на этапе S3 во время записи, кодер/декодер 7 ЕСС выполняет обработку декодирования, как обработку на этапе S8. Например, кодер/декодер 7 ЕСС может выполнять обработку инверсии битов для четырех символов AUNO, AUN1, Parity3 и Parity2 из девяти символов, которые составляют модуль AU адреса. Обработка декодирования позволяет получать исходные данные в полях адреса (этап S9).
Кодер/декодер 7 ЕСС затем выполняет обработку декодирования ЕСС в качестве обработки на этапе S10. Информацию адреса (AUN0-AUN3), таким образом, декодируют, и кодер/декодер 7 ЕСС передает информацию адреса в системный контроллер 10.
Во время записи и воспроизведения на диск 100, предназначенный для записи, обработку на этапах S24-S26 по фиг.13 выполняют с помощью декодера 9 адреса.
Декодер 9 адреса выполняет обработку декодирования, предназначенную для информации, которую считывают из канавок качаний диска 100, как обработку на этапе S24. Например, в случае на фиг.13, когда информация показана как "111100010000100", обработку инверсии битов выполняют для полубайта 14, полубайта 13, полубайта 12, полубайта 11, полубайта 7 и полубайта 2.
Таким образом, формируют информацию ADIP во время кодирования ЕСС. В этом состоянии выполняют декодирование ЕСС, как обработку на этапе S25, и декодируют адреса в качаниях (этап S26). Адреса в качаниях передают в системный контроллер 10.
В результате выполнения обработки, которая была описана выше, устройство привода диска в настоящем примере может правильно считывать адреса в данных и адреса в качаниях на диске Версии 2.0 во время записи и воспроизведения. Это позволяет правильно выполнять операцию воспроизведения и операцию записи.
Следует отметить, что в примерной конфигурации на фиг.15 представлено устройство привода диска, которое подключено к AV системе 20, но устройство привода диска в соответствии с настоящим вариантом осуществления также может быть подключено, например, к персональному компьютеру или тому подобное.
Кроме того, также возможна конфигурация, в которой устройство привода диска не подключено к другим модулям. В этом случае могут быть предусмотрены участок операций и участок дисплея и конфигурация интерфейса ввода данных может отличаться от показанной на фиг.15. Другими словами, запись и воспроизведение могут быть выполнены в соответствии с операцией пользователя и могут быть предусмотрены разъемы для ввода и вывода различных типов данных.
Множество других примеров конфигурации также могут быть, очевидно, рассмотрены, и также можно рассмотреть примеры устройства, предназначенного только для записи, и устройства, предназначенного только для воспроизведения.
5. Устройство мастеринга
Устройство мастеринга, которое представляет собой вариант осуществления устройства записи в соответствии с настоящим изобретением, поясняется ниже.
Процессы изготовления диска можно приблизительно разделить на то, что называется процессами мастер-диска и процессами тиражирования. Процессы мастер-диска представляют собой процессы вплоть до получения металлического мастер-диска (штампа), который используется в процессах тиражирования, и процессы тиражирования представляют собой процессы, в которых штамп используется для производства большого объема оптических дисков, которые представляют собой копии.
Более конкретно процессы мастер-диска включают в себя покрытие полированной стеклянной подложки фоторезистом и то, что называется вырезанием, при котором формирует углубления и канавки путем экспонирования светочувствительной пленки лазерным лучом.
В случае настоящего примера вырезание канавок выполняют с использованием качаний, которые основаны на предварительно записанной информации в области, которая соответствует зоне РВ (см. фиг.2) на самой внутренней кромке диска. Вырезание канавок также выполняют с помощью качаний, которые основаны на адресах ADIP в области, которая соответствует зоне RW. Предварительно записанную информацию, которую записывают, подготавливают в процессе подготовки, которая называется премастерингом.
После окончания вырезания и указанных процессов, таких как проявление, выполняют перенос информации на металлическую поверхность путем, например, электролитья и, таким образом, формируют штамп, необходимый для выполнения тиражирования диска.
Затем после переноса информации на подложку, например, способом формования под давлением или тому подобное и формирования отражающего свет покрытия на ее поверхности, выполняют необходимую обработку, такую как механическая обработка для придания формы диска и т.п., и получают завершенный конечный продукт. В настоящем примере им становится диск Версии 2.0.
В устройстве мастеринга предусмотрен участок 71 генерирования предварительно записанной информации, участок 72 генерирования адресов, участок 73 переключения, участок 74 нарезки и контроллер 70.
Участок 71 генерирования предварительно записанной информации выводит предварительно записанную информацию, которую подготавливают в процессе премастеринга.
Участок 72 генерирования адресов последовательно выводит значения как абсолютные адреса.
На участке 74 нарезки предусмотрены оптические участки (82, 83, 84), которые выполняют нарезку путем направления лазерного луча на стеклянную подложку 101, которая была покрыта неорганическим резистом или тому подобное.
Участок 74 нарезки также включает в себя участок 85 вращения/транспортирования подложки, который осуществляет привод стеклянной подложки 101 во вращение и перемещает ее посредством скольжения. В участке 74 нарезки также предусмотрен участок 81 обработки сигналов и датчик 86. Участок 81 обработки сигналов преобразует входные данные в данные записи и подает их в оптические участки. Датчик 86 позволяет различать, на основе положения участка 85 вращения/транспортирования подложки, является ли положение нарезки зоной РВ или зоной RW.
Источник 82 луча лазера, участок 83 модуляции и головка 84 нарезки предусмотрены как оптические участки, упомянутые выше. Луч, выводимый из источника 82 луча лазера, модулируют, используя участок 83 модуляции, на основе записываемых данных. Головка 84 нарезки концентрирует модулированный луч из участка 83 модуляции и направляет его на поверхность фоторезиста стеклянной подложки 101.
Участок 83 модуляции включает в себя акустооптический модулятор (АОМ) луча, который включает выходной луч из источника 82 луча лазера и выключает его, а также акустооптический дефлектор луча (AOD), который отклоняет выходной луч из источника 82 луча лазера на основе сигнала генерирования качаний.
Кроме того, участок 85 вращения/транспортирования подложки выполнен таким образом, что он включает в себя помимо прочих элементов двигатель вращения, который приводит во вращение стеклянную подложку 101, участок детектирования (FG), который детектирует скорость вращения двигателя вращения, двигателя скользящего транспортирования, предназначенный для перемещения со скольжением стеклянной подложки 101 в ее радиальном направлении, и сервоконтроллер, который управляет скоростью вращения двигателя вращения и двигателя скользящего транспортирования отслеживанием дорожек головки 84 нарезания и т.п.
Участок 81 обработки сигналов выполняет обработку генерирования модулированного сигнала, который формирует модулированный сигнал, путем выполнения обработки форматирования, которая формирует входные данные путем прикрепления кодов коррекции ошибки, например, к предварительно записанной информации и информации адреса, которую подают, например, через участок 73 переключения, и путем выполнения упомянутой обработки вычислений для данных, которые выводят из обработки форматирования.
Обработку привода также выполняют, при которой осуществляют привод модулятора луча и дефлектора луча в участке 83 модуляции на основе модулированного сигнала.
В участке 74 нарезания во время нарезания участок 85 вращения/транспортирования подложки приводит во вращение стеклянную подложку 101 с постоянной линейной скоростью и также выполняет транспортирование со скольжением стеклянной подложки 101 по мере ее вращения, таким образом что формируется дорожка в форме спирали с определенным шагом дорожки.
Одновременно с этим луч, который выводят из источника 82 луча лазера, преобразуют в модулированный луч с помощью участка 83 модуляции на основе сигнала модуляции, поступающего из участка 81 обработки сигналов, и направляют на поверхность фоторезиста стеклянной подложки 101 с помощью головки 84 нарезания таким образом, что фоторезист реагирует на луч на основе данных и канавок.
Контроллер 70 управляет характеристиками операций во время нарезания, выполняемого с помощью участка 74 нарезания и также управляет участком 71 генерирования предварительно записанной информации, участком 72 генерирования адресов и участком 73 переключения при отслеживании сигнала отдатчика 86.
Когда начинается нарезание, контроллер 70 определяет положение перемещения со скольжением участка 85 вращения/транспортирования подложки как исходное положение для участка 74 нарезания, таким образом, головка 84 нарезания начинает излучение луча лазера от самой внутренней кромки. Затем контроллер 70 начинает осуществлять привод стеклянной подложки 101 с постоянной линейной скоростью и скольжение стеклянной подложки 101 для формирования канавок с упомянутым шагом дорожки.
В этом состоянии предварительно записанную информацию выводят из участка 71 генерирования предварительно записанной информации и подают в участок 81 обработки сигналов через участок 73 переключения. Кроме того, начинается вывод лазера из источника 82 луча лазера, и участок 83 модуляции модулирует луч лазера на основе модулированного сигнала из участка 81 обработки сигналов, то есть модулированного сигнала, в котором закодирована предварительно записанная информация с использованием модуляции частоты, выполняя, таким образом, нарезку канавки на стеклянной подложке 101. Нарезку канавки выполняют, таким образом, в области, которая соответствует зоне РВ.
После этого, когда контроллер 70 детектирует на основе сигнала от датчика 86, что операция нарезки была выполнена до положения, которое соответствует зоне РВ, контроллер 70 переключает участок 73 переключения на сторону участка 72 генерирования адресов и вырабатывает команду для генерирования значения адреса последовательно от участка 72 генерирования адресов.
Информацию адреса, таким образом, передают из участка 72 генерирования адресов в участок 81 обработки сигналов через участок 73 переключения. Затем луч лазера из источника 82 луча лазера модулирует на участке 83 модуляции на основе модулированного сигнала из участка 81 обработки сигналов, то есть модулированного сигнала информации адреса, и выполняет нарезку канавки на стеклянной подложке 101 в соответствии с модулированным лучом лазера.
Таким образом, нарезку канавок, которые содержат адреса в виде качаний, выполняют в области, которая соответствует зоне RW.
Когда контроллер 70 детектирует на основе сигнала от датчика 86, что операция нарезки достигла конечной кромки выводной зоны, контроллер 70 прекращает операцию нарезки.
Операции такого вида формируют экспонированный участок на стеклянной подложке 101, который соответствует качанию канавок зоны РВ и зоны RW.
После этого формируют штамп путем проявления, электролитья и т.п. и получают диск, который был описан выше, используя этот штамп.
Здесь участок 81 обработки сигналов выполняет обработку на этапах S21 и S22 по фиг.13 в соответствии с информацией адреса, которую последовательно подают из участка 72 генерирования адресов.
Участок 72 генерирования адресов выполняет обработку на этапе S20 на фиг.13, при которой генерируют данные адреса. Другими словами, участок 72 генерирования адреса выводит 24 бита (шесть полубайтов) адреса в виде качаний, который показан на фиг.10-10b.
Участок 81 обработки сигналов выполняет кодирование ЕСС, как обработку, выполняемую на этапе S21. Другими словами, для шести полубайтов адреса в качаниях, которые были сгенерированы на этапе S20, участок 81 обработки сигналов формирует кодированные данные коррекции ошибки со структурой, которая показана на фиг.12, путем генерирования трех полубайтов из вспомогательных данных и шести полубайтов из информации проверки на четность. Участок 81 обработки сигналов затем выполняет обработку преобразования полубайта, как обработку на этапе S22. Другими словами, участок 81 обработки сигналов выполняет обработку инверсии битов для полубайта 14, полубайта 13, полубайта 12, полубайта 11, полубайта 7 и полубайта 2, как обработку инверсии бита, которая показана в виде последовательности "11110010000100" на фиг.13.
Участок 81 обработки сигналов управляет участком 83 модуляции путем генерирования модулированного сигнала в соответствии с информацией ADIP, которая была обработана таким образом.
Обработку экспонирования, показанную на фиг.13 таким образом, выполняют для адресов, представленных в виде качаний.
Следует отметить, что устройство мастеринга в случае, когда предполагается, что диск представляет собой диск типа, предназначенного только для воспроизведения, выполняет экспонирование для рядов углублений, без выполнения этой обработки для канавок с качаниями.
В этом случае, информацию адреса и данные пользователя кодируют, используя описанные выше структуры со ссылкой на фиг.3 и фиг.6-8, и луч лазера из источника 82 луча лазера модулируют в соответствии с кодированными данными.
В случае устройства мастеринга такого типа, участок генерирования данных пользователя предусмотрен вместо участка 71 генерирования предварительно записанной информации на фиг.16. Кроме того, кодирование ЕСС данных пользователя и информации адреса (AUN) из участка 72 генерирования адресов выполняют с помощью участка 81 обработки сигналов. Обработку на этапах S2-S5 по фиг.9 выполняют в это время.
Экспонирование ряда углублений мастер-диска для изготовления диска, предназначенного только для воспроизведения как диска в соответствии и с версией 2.0, выполняют, таким образом. После этого, изготовляют диск Версии 2.0 путем выполнения проявления, изготовления штампа, формирования подложки и формирования слоя для слоя записи, слоя покрытия и т.п.
В соответствии с настоящим вариантом осуществления пояснялся диск, так же как и устройство привода диска и устройство мастеринга, которые совместимы с диском, но настоящее изобретение не ограничено этими примерами, и различные модификации могут быть рассмотрены в пределах объема настоящего изобретения.
Для специалистов в данной области техники должно быть понятно, что различные модификации, комбинации, подкомбинации и изменения могут возникнуть в зависимости от конструктивных требований и других факторов, если только они находятся в пределах объема приложенной формулы изобретения или ее эквивалентов.
На фиг.17 показана блок-схема последовательности операций, представляющая выполняемый компьютером процесс для определения, является ли диск диском с одним слоем/двумя слоями, или диском с тремя/четырьмя слоями. Если привод обладает возможностью записи данных не только на диски с тремя/четырьмя слоями, но также и на диски с одним/двумя слоями, тогда привод должен распознавать эти диски для применения разной инверсии к данным адреса. Процесс начинается на этапе S1701, где диск вставляют в устройство воспроизведения, и затем на этапе S1702 детектируют присутствие диска и считывают данные в ВСА. На этапе S1702 в качестве альтернативы или в дополнение можно использовать сигнал вхождения в синхронизацию (PI) или ошибки фокусирования для физического определения количества слоев на диске. Пример физического детектирования раскрыт в патенте США 6,005,832, полное содержание которого приведено здесь в качестве ссылочного материала. Флаг слоя также можно считывать непосредственно из зоны ВСА, и при этом флаг обозначает, является ли диск однослойным/двухслойным диском (более раннее поколение), или трехслойным/четырехслойным диском (более позднее поколение). Например, отсутствие флага означает, что диск представляет собой однослойный/двухслойный диск. Наличие флага обозначает, что диск является трехслойным/четырехслойным диском. В качестве альтернативы флаг может обозначать количество слоев записи слоев непосредственно, например, как 1, 2, 3 или 4 слоя.
Обработка затем переходит на этап S1703, где подают запрос для определения, является ли диск однослойным/двухслойным диском, и затем обработка переходит на этап S1705, где обработку адреса устанавливают для трехслойного/четырехслойного диска. Однако если ответ на вопрос на этапе S1703 будет утвердительным, обработка переходит на этап S1704, где выполняют установку для обработки адреса для диска более раннего поколения (например, однослойного/двухслойного диска). После выполнения этапов S1705 и S1704 подают соответствующие запросы на этапах S1707 и S1706 для определения, была ли успешно выполнена коррекция ошибок, например, путем сравнения частоты появления ошибок с заданным пороговым значением, таким как, например, 1/100, 1/1000, 1/10000 или 1/100000. Если это не так, тогда обработка переходит на этап S1704 с этапа S1707 для попытки выполнения обработки адреса в соответствии с однослойным/двухслойным диском несмотря на вывод, полученный на этапе S1703, о том, что диск не является однослойным/двухслойным диском. После этого, если коррекция ошибки будет успешно выполнена на этапе S1706, на этапе S1709 определяют, что диск представляет собой однослойный/двухслойный диск.
С другой стороны, если на этапе S1706 получают отрицательный результат, обработка переходит на этап S1705, где установку обработки адреса осуществляют на основе предположения, что диск представляет собой трехслойный/четырехслойный диск, и если коррекция ошибки будет успешно выполнена на этапе S1707, тогда на этапе S1708 определяют, что диск представляет собой трехслойный/четырехслойный диск. На этом чертеже, хотя пояснялось, что привод может проверять данные ВСА (данные флага), нет необходимости проверять эти данные. Привод может приблизительно проверять количество слоев на основе физического детектирования (используя сигналы PI и/или сигналы коррекции ошибки фокусирования), и привод может установить селектор на основе определения физического детектирования. Кроме того, если схема коррекции ошибки не может правильно декодировать данные адреса (например, выше заданной частоты ошибок), привод может изменить установку, как отмечено стрелкой из этапа S1706 в этап S1705 и из этапа S1707 в этап S1704. Поэтому проверка флага для привода не всегда необходима для привода. Кроме того, проверка флага и физическая проверка могут быть выполнены в случае необходимости в качестве альтернативы и/или в качестве дополнения.
На фиг.18 показана блок-схема, аналогичная на фиг.15, но включающая в себя системный контроллер 1801, который используется как устройство определения, которое на основе входных сигнала из матрицы 4, а также на основе сигнала обратной связи из модуля 7 ЕСС управляет селектором 1802 для выбора между обработкой для однослойного/двухслойного диска или трехслойного/четырехслойного диска. В частности, если системный контроллер 1801 определяет, что диск представляет собой однослойный/двухслойный диск, селектор 1802 подключают к с первой схеме 1803 исключающее "ИЛИ". Такая первая 1803 схема исключающее "ИЛИ" инвертирует биты адреса в соответствии со стандартом диска первого поколения, который применим для однослойного или двухслойного диска. Выход первой схемы 1803 исключающее "ИЛИ" затем передают в модуль 7 ЕСС.
Однако если системный контроллер 1801 определяет, что диск представляет собой трехслойный/четырехслойный диск, контроллер 1801 системы устанавливает селектор 1802. который должен быть соединен со второй схемой 1804 исключающее "ИЛИ". Вторая схема 1804 исключающее "ИЛИ" инвертирует биты адреса в соответствии с диском второго поколения (трехслойный/четырехслойный диск) перед выполнением коррекции ошибки в модуле 7 ЕСС. Выход модуля 7 ЕСС передают в системный контроллер 1801 в форме сигнала PI или сигнала ошибки фокусирования. Поэтому когда в модуле 7 ЕСС детектируют возникновение ошибок, количество которых превышает заданный уровень, системный контроллер 1801 определяет, что текущее состояние селектора 1802 находится в неправильном положении, и изменяет это состояние селектора 1802.
Настоящая заявка содержит предмет изобретения, относящийся к тому, что раскрыто в приоритетной заявке JP 2009-114241 на японский патент, поданной в японское патентное ведомство 11 мая 2009 г., полное содержание которой приведено здесь в качестве ссылочного материала.
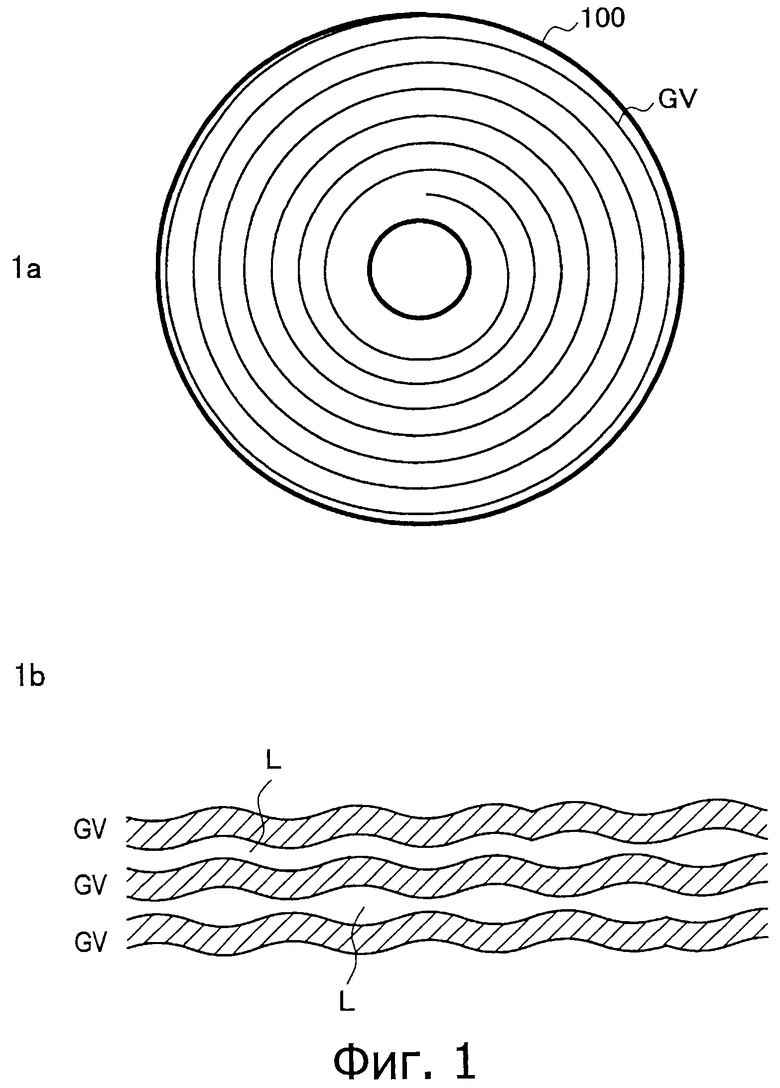
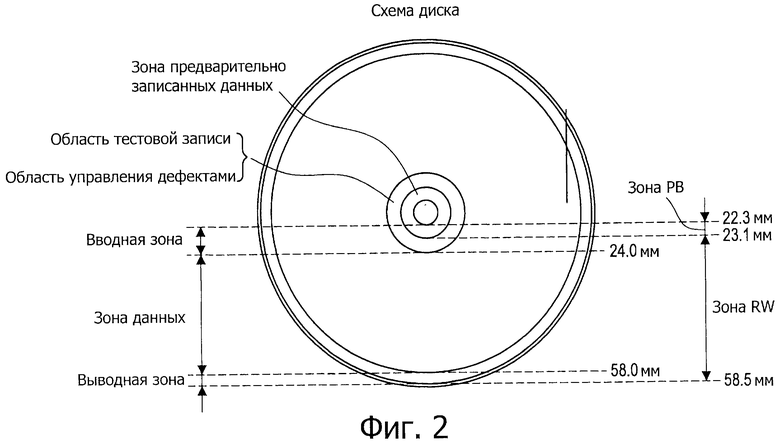
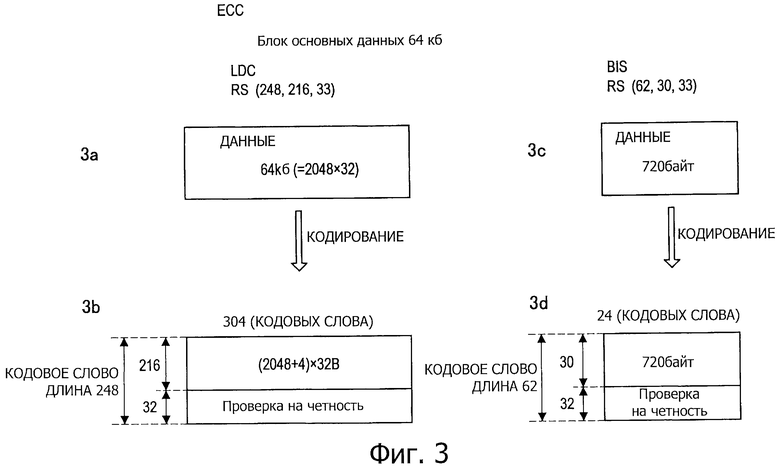
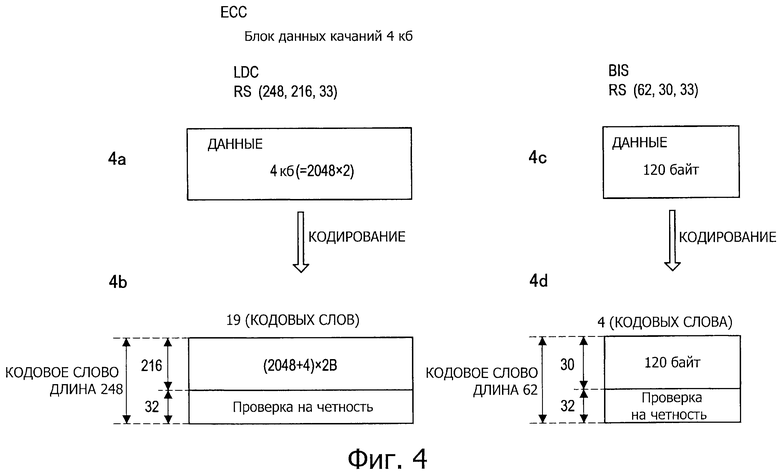
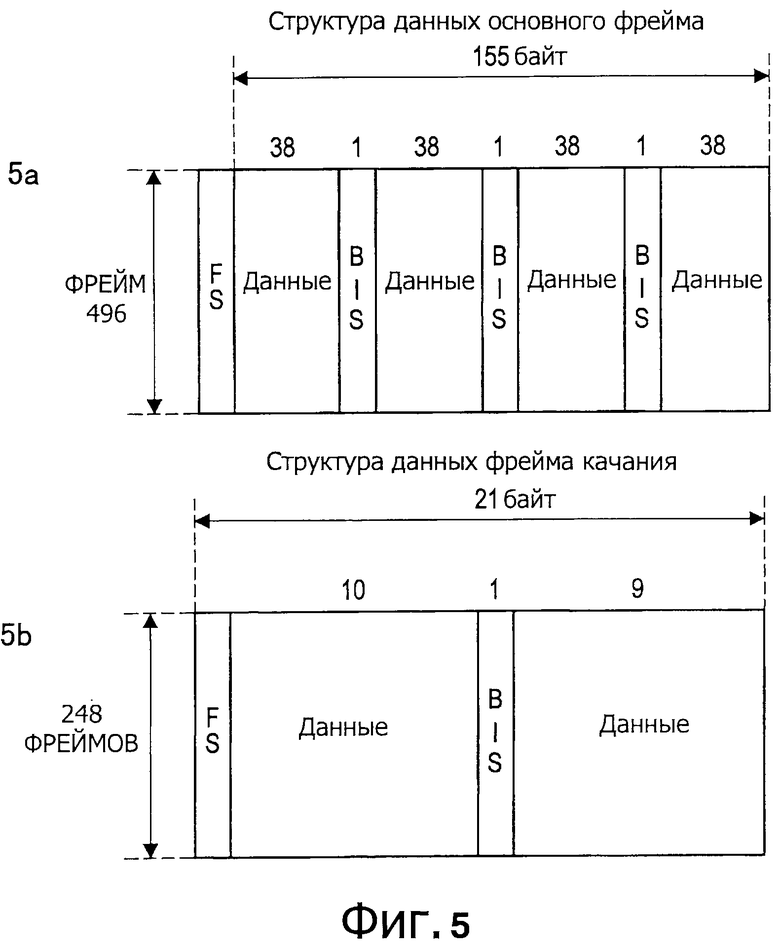
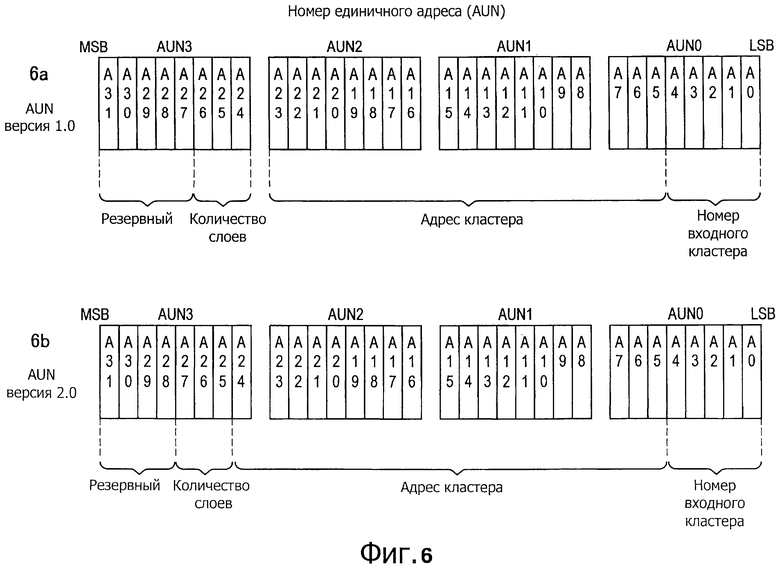
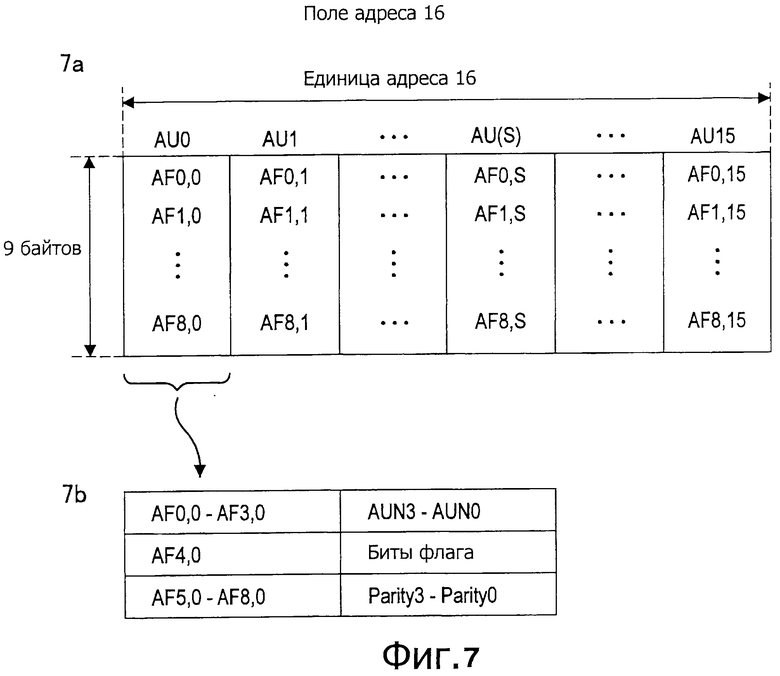
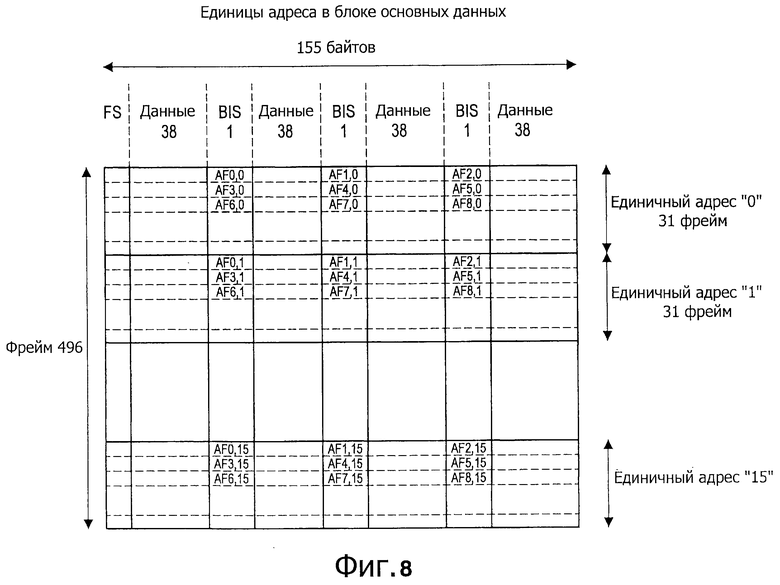
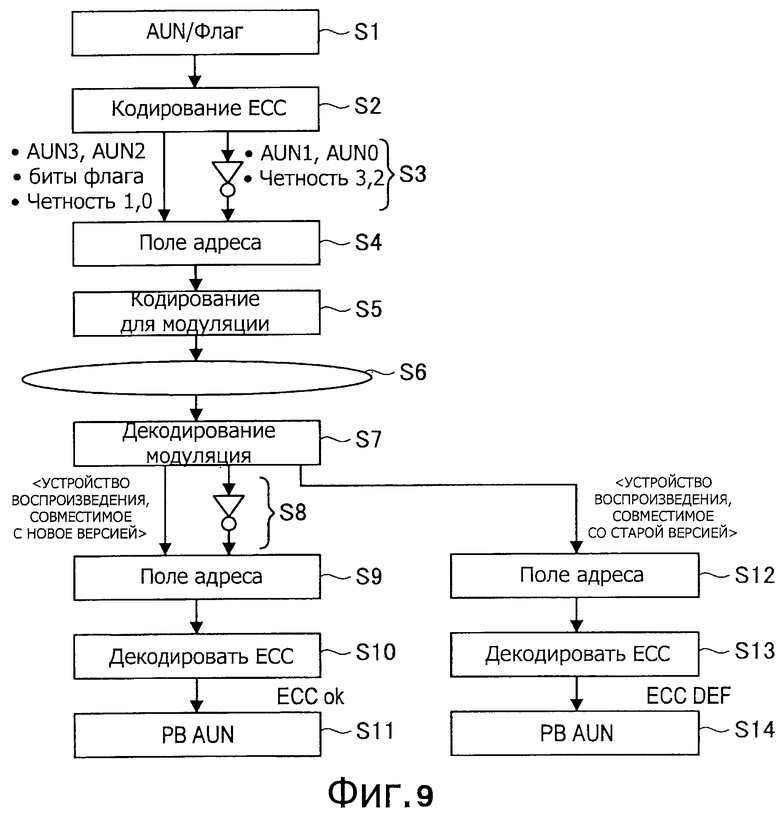
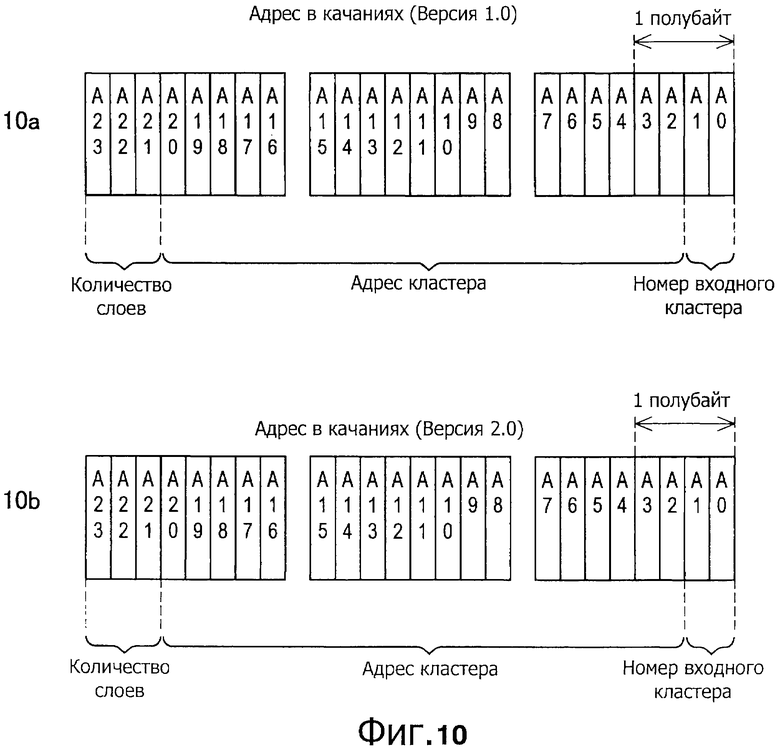
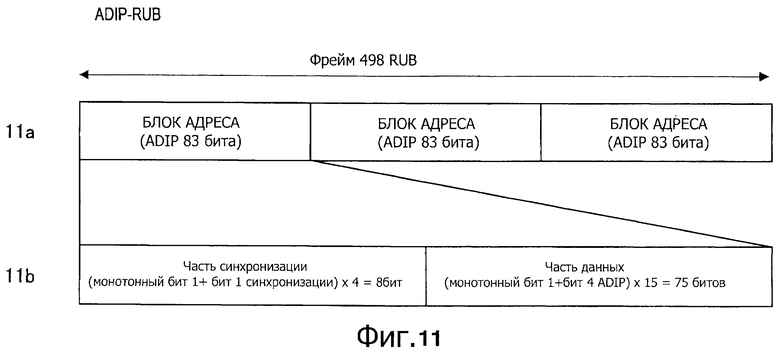
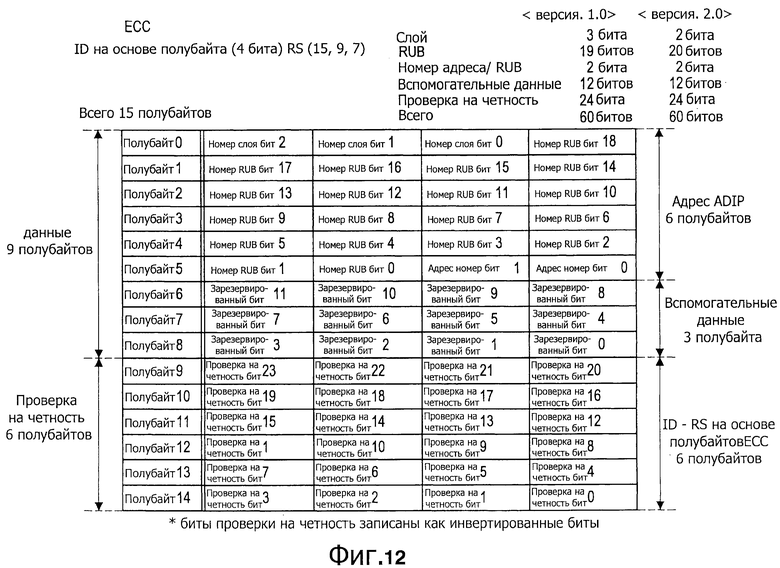
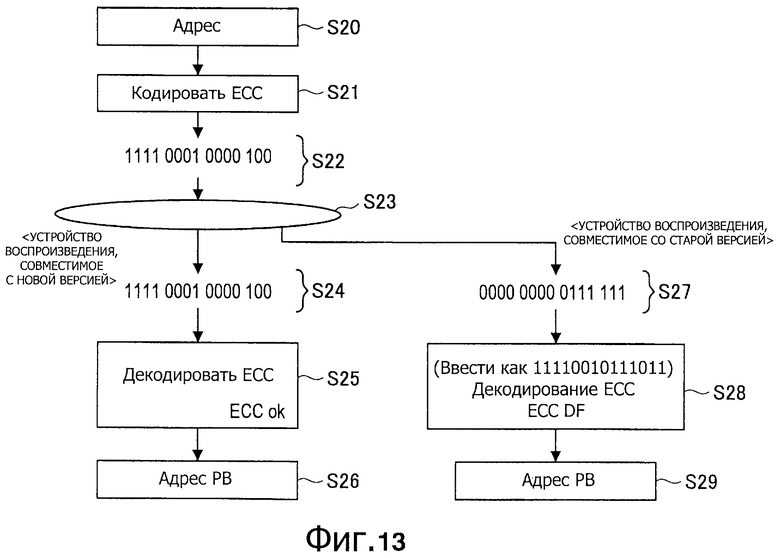
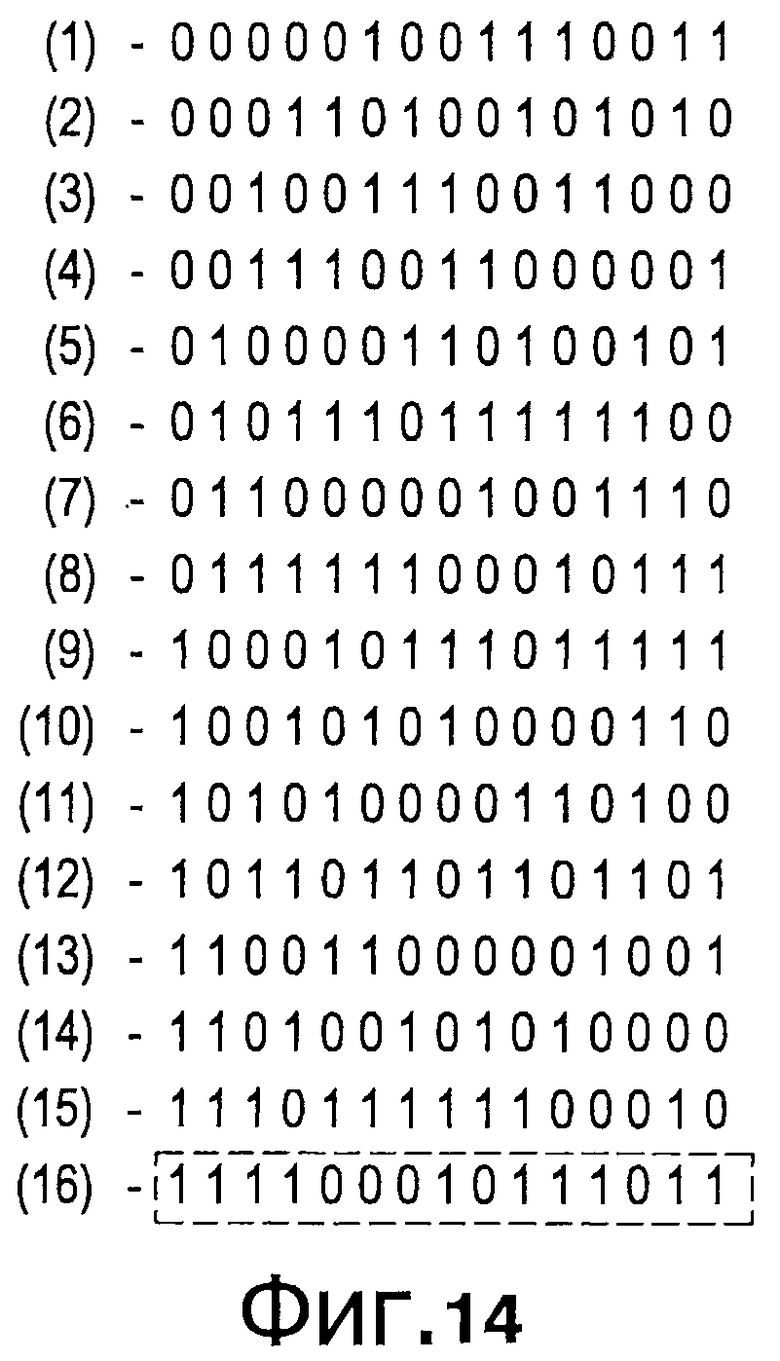
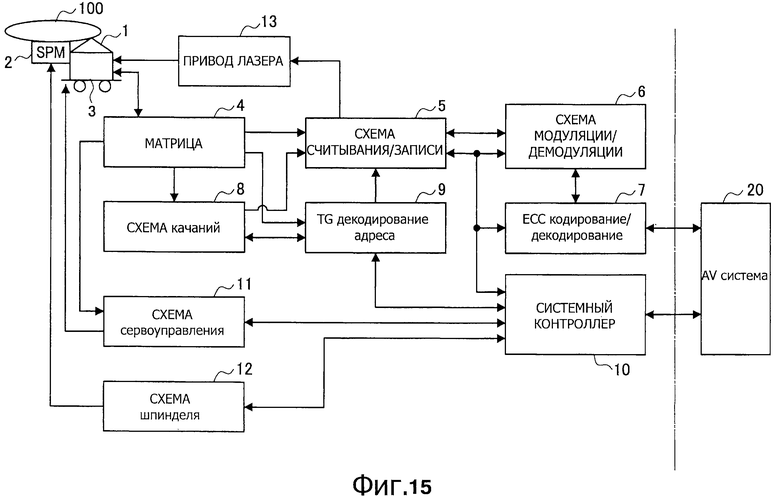
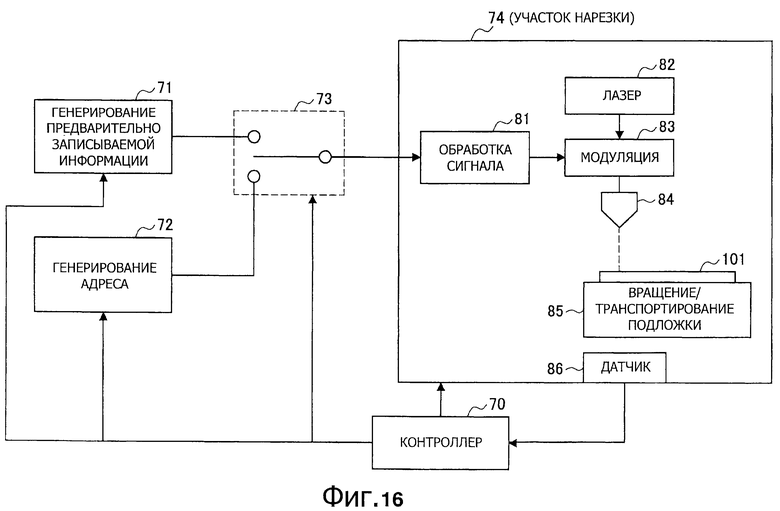
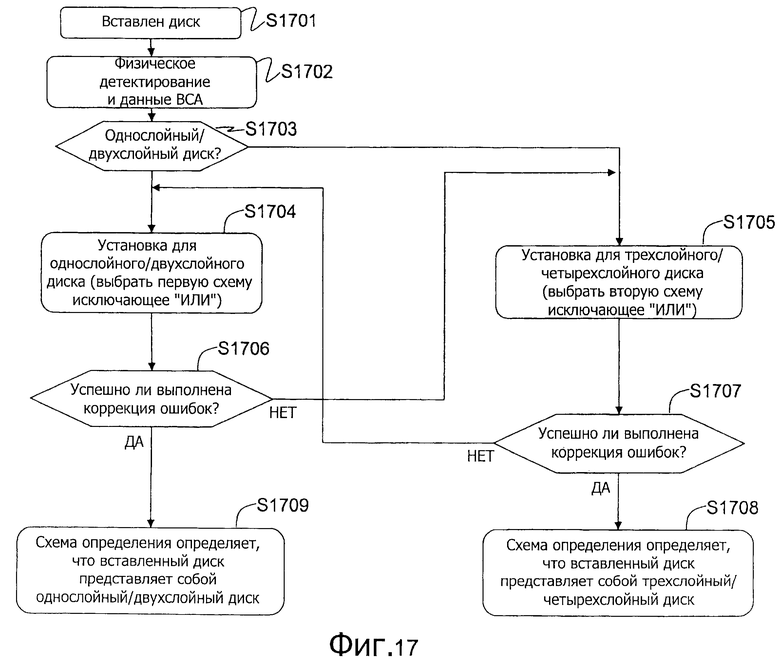
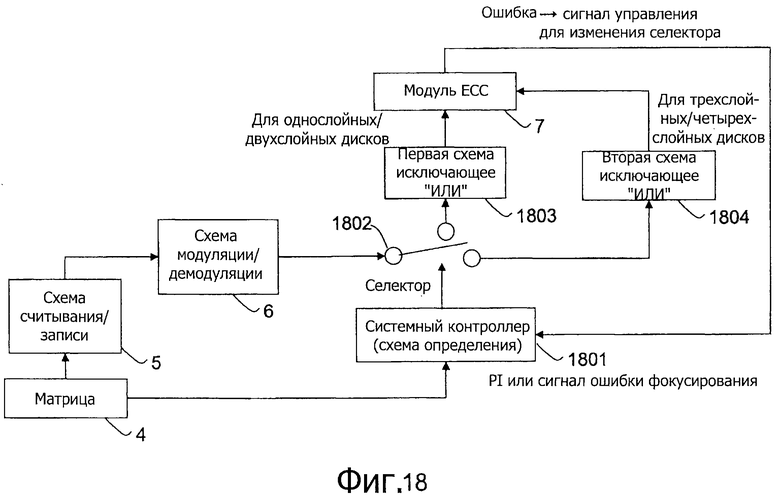
Предложены способ изготовления мастер-диска, оптический диск, способ воспроизведения и устройства записи и воспроизведения оптического диска. В способе изготовления мастер-диска кодируют (S21) исходную информацию адреса для формирования кодированной исходной информации адреса. Формат адреса кодированной исходной информации адреса структурируют для кода Рида-Соломона на основе полубайтов, в котором длина кодового слова составляет пятнадцать полубайтов: полубайт 0 - полубайт 14, каждый полубайт имеет четыре бита. Выполняют (S22) инверсию битов для заданных полубайтов из пятнадцати полубайтов кодированной исходной информации адреса для формирования частично инвертированной кодированной исходной информации адреса. Заданные полубайты, для которых выполнена инверсия битов, определяются вектором инверсии 111100010000100. Пятнадцать компонент вектора инверсии соответствуют пятнадцати полубайтам: полубайт 14 - полубайт 0 соответственно, и компоненты вектора с значением 1 определяют заданные полубайты. Техническим результатом является предотвращение возможности использования оптического носителя на воспроизводящем оборудовании другой версии. 5 н. и 3 з.п. ф-лы, 18 ил.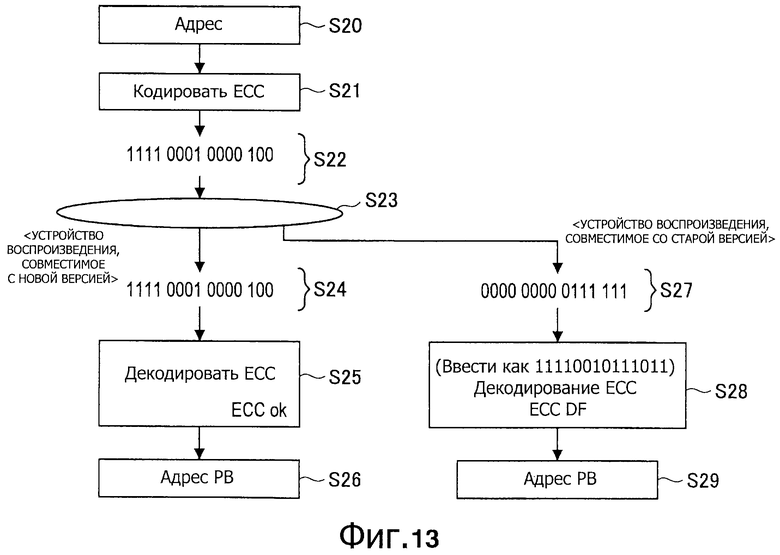
1. Способ изготовления мастер-диска для создания оптического диска, включающий:
кодирование (S21) исходной информации адреса для формирования кодированной исходной информации адреса, при этом формат адреса кодированной исходной информации адреса структурируют для кода Рида-Соломона на основе полубайтов, в котором длина кодового слова составляет пятнадцать полубайтов: полубайт 0 - полубайт 14, причем каждый полубайт имеет четыре бита;
выполнение (S22) инверсии битов для заданных полубайтов из пятнадцати полубайтов кодированной исходной информации адреса для формирования частично инвертированной кодированной исходной информации адреса, и
формирование мастер-диска путем записи на нем частично инвертированной кодированной исходной информации адреса,
отличающийся тем, что заданные полубайты, для которых выполнена инверсия битов, определяются вектором инверсии, который является 111100010000100,
при этом пятнадцать компонент вектора инверсии соответствуют пятнадцати полубайтам: полубайт 14 - полубайт 0 соответственно, и компоненты вектора с значением 1 определяют заданные полубайты.
2. Оптический диск, имеющий записанную на нем считываемую компьютером информацию адреса, содержащий:
подложку; и
по меньшей мере 3 слоя данных, сформированных поверх подложки, причем по меньшей мере один из 3 слоев данных имеет частично инвертированную кодированную исходную информацию адреса, сформированную в нем, при этом формат адреса кодированной исходной информации адреса структурирован для кода Рида-Соломона на основе полубайтов, в котором длина кодового слова составляет пятнадцать полубайтов: полубайт 0 - полубайт 14, причем каждый полубайт имеет четыре бита;
при этом частично инвертированная кодированная исходная информация адреса соответствует кодированной исходной информации адреса, но имеет инвертированные биты в заданных полубайтах пятнадцати полубайт упомянутой первоначальной кодированной исходной информации адреса,
отличающийся тем, что заданные полубайты, для которых выполнена инверсия битов, определяются вектором инверсии, который является 111100010000100,
при этом пятнадцать компонент вектора инверсии соответствуют пятнадцати полубайтам: полубайт 14 - полубайт 0 соответственно, и компоненты вектора с значением 1 определяют заданные полубайты.
3. Оптический диск по п.2, в котором частично инвертированная кодированная исходная информация адреса сформирована в 3-м слое данных и/или 4-м слое оптического диска.
4. Оптический диск по п.2, в котором частично инвертированная кодированная исходная информация адреса сформирована путем качания канавки.
5. Способ воспроизведения для оптического диска, включающий этапы, на которых:
считывают с помощью блока оптической головки частично инвертированную кодированную исходную информацию адреса с оптического диска;
выполняют с использованием механизма обработки инверсии обработку инверсии для упомянутой частично инвертированной кодированной исходной информации адреса для получения кодированной исходной информации адреса, причем
формат адреса кодированной исходной информации адреса структурирован для кода Рида-Соломона на основе полубайтов, в котором длина кодового слова составляет пятнадцать полубайтов: полубайт 0 - полубайт 14, причем каждый полубайт имеет четыре бита;
при этом частично инвертированная кодированная исходная информация адреса соответствует кодированной исходной информации адреса, но имеет инвертированные биты в заданных полубайтах пятнадцати полубайт упомянутой первоначальной кодированной исходной информации адреса; и
декодируют упомянутую кодированную исходную информацию адреса для получения исходной информации адреса,
отличающийся тем, что заданные полубайты, для которых выполнена инверсия битов, определяются вектором инверсии, который является 111100010000100,
при этом пятнадцать компонент вектора инверсии соответствуют пятнадцати полубайтам: полубайт 14 - полубайт 0 соответственно, и компоненты вектора с значением 1 определяют заданные полубайты.
6. Устройство воспроизведения для оптического диска, содержащее:
блок оптической головки, выполненный с возможностью считывания информации с оптического диска, причем упомянутая информация включает частично инвертированную кодированную исходную информацию адреса;
механизм инверсии, выполненный с возможностью инвертировать заданные части частично инвертированной кодированной исходной информации адреса для предоставления кодированной исходной информации адреса, причем
формат адреса кодированной исходной информации адреса структурирован для кода Рида-Соломона на основе полубайтов, в котором длина кодового слова составляет пятнадцать полубайтов: полубайт 0 - полубайт 14, причем каждый полубайт имеет четыре бита;
при этом частично инвертированная кодированная исходная информация адреса соответствует кодированной исходной информации адреса, но имеет инвертированные биты в заданных полубайтах пятнадцати полубайт упомянутой первоначальной кодированной исходной информации адреса, и
декодер, выполненный с возможностью декодирования кодированной исходной информации адреса для предоставления исходной информации адреса, используемой для идентификации места расположения данных на упомянутом оптическом диске,
отличающийся тем, что заданные полубайты, для которых выполнена инверсия битов, определяются вектором инверсии, который является 111100010000100,
при этом пятнадцать компонент вектора инверсии соответствуют пятнадцати полубайтам: полубайт 14 - полубайт 0 соответственно, и компоненты вектора с значением 1 определяют заданные полубайты.
7. Устройство записи для оптического диска, содержащее:
кодер, выполненный с возможностью кодирования исходной информации адреса, для формирования кодированной исходной информации адреса; причем формат адреса кодированной исходной информации адреса структурирован для кода Рида-Соломона на основе полубайтов, в котором длина кодового слова составляет пятнадцать полубайтов: полубайт 0 - полубайт 14, причем каждый полубайт имеет четыре бита;
механизм инвертирования, выполненный с возможностью выполнять инверсию битов для заданных полубайтов из пятнадцати полубайтов кодированной исходной информации адреса для формирования частично инвертированной кодированной исходной информации адреса, и
механизм записи, выполненный с возможностью записи упомянутой частично инвертированной кодированной исходной информации адреса на оптическом диске,
отличающийся тем, что заданные полубайты, для которых выполнена инверсия битов, определяются вектором инверсии, который является 111100010000100,
при этом пятнадцать компонент вектора инверсии соответствуют пятнадцати полубайтам: полубайт 14 - полубайт 0 соответственно, и компоненты вектора с значением 1 определяют заданные полубайты.
8. Устройство по п.7, в котором механизмы записи выполнены с возможностью записывать частично инвертированную кодированную исходную информацию адреса в 3-й слой данных и/или 4-й слой оптического диска.
| WO 2009072305 A1, 11.06.2009 |

