Предложенный способ и устройство позволяют реализовать трехмерный рентгеновский контроль и диагностику технических и биологических объектов в режиме реального времени, в том числе путем модернизации имеющегося рентгеновского оборудования.
Применение данного способа и устройства трехмерного рентгеновского контроля особенно эффективно в тех случаях, когда нарушители сознательно размешают недозволенные вложения в багаже или ручной клади за другими предметами, препятствуя обнаружению по двухмерному рентгеновскому изображению. Распознавание недозволенных вложений в таких случаях с использованием объемного изображения может выполняться более надежно, за меньшее время или при меньшей квалификации персонала, обеспечивая тем самым, по предварительной оценке, высокую экономическую эффективность разработанных методов и технических средств для решения актуальных задач оперативного досмотра транспортных средств и грузов, направленных на борьбу с терроризмом и незаконным перемещением через границу или по территории страны оружия, наркотиков, обнаружения взрывчатых веществ и др.
В области медицины данное предложение можно эффективно использовать для выполнения трехмерной рентгеновской диагностики (том числе ангиографии), а также для выполнения целого ряда медицинских операций, в том числе современных неинвазивных хирургических операций.
Большинство существующих методов и серийно выпускаемой аппаратуры для рентгеновского анализа структуры объектов основываются, в основном, на регистрации и обработке статических двухмерных изображений объектов, полученных в диапазоне рентгеновского излучения.
Примером такой аппаратуры для медицины является установка типа РУМ-20М, ее более современный аналог РДК-50 (или установка «Электрон» на базе УРИ-612), которыми оснащены большинство лечебных учреждений России.
Примером аппаратуры для таможенного досмотра является аппаратура фирмы Hermann, которая установлена в большинстве пунктов досмотра России.
Для получения трехмерных изображений внутренней структуры объектов применяется аппаратура компьютерной томографии. Компьютерные томографические системы выпускаются целым рядом фирм для применения в области медицины и техники.
Например, аппаратура, выпускаемая компанией Imatro Inc. для таможенного досмотра сканирует багаж узким веерным пучком рентгеновского излучения и детектирует прошедшее излучение с помощью линейки (или полукольца) из большого числа дискретных детекторов. В результате математической обработки большого количества измеренных проекций получается полное трехмерное распределение плотности контролируемого объекта.
Вследствие длительного процесса предварительного сканирования и последующего компьютерного синтеза (реконструкции) трехмерного изображения, компьютерный томограф не позволяет анализировать процессы, происходящие внутри объектов, в режиме реального времени, при этом требуются значительные затраты на аппаратуру. Время компьютерного синтеза (восстановления) трехмерного изображения в такого рода аппаратуре составляет 15-30 и более минут.
Фирма SIEMENS и целый ряд других фирм выпускают более дешевые по сравнению с компьютерными томографами установки для компьютерного синтеза (восстановления) трехмерных рентгеновских изображений на основе множества двухмерных изображений, полученных на поворотном рентгеновском аппарате типа "Аркоскоп" (С-арк).
В ГОСНИИАС (Москва) и за рубежом активно ведутся работы по реконструкции трехмерных сцен на основе двумерных телевизионных изображений. В частности, используется метод стереофотограмметрии и локализации градиентных областей на основе т.н. теории катастроф. В ГОИ, НИИТ, ЛЭТИ и других организациях Санкт-Петербурга, а также за рубежом проводятся работы по средствам визуализации объемных изображений, включая объемные дисплеи, лазерные системы, а также компьютерные системы, обеспечивающие эффект восприятия, аналогичный наблюдению голограмм.
Наиболее близким, принятым за аналог, является патент WO 03039213 А2, VREX INC, SWIFT DAVID, FARIS SADEG M, 08.05.2003 «Трехмерная стереоскопическая рентгеновская система».
В нашем аналоге рассматривается его реализация только при таможенном досмотре, а возможность реализации их рентгеновской системы в медицинских рентгеновских аппаратах не раскрыта совсем, а только упоминается.
Также в аналоге не раскрывают способ и устройство реализации специального 3D процессора, ссылаясь на его известность. У нас вместо процессора используется формирователь сигналов записи и коммутации. В нашем случае, в отличие от аналога, рассматривается непрерывный процесс получения трехмерных рентгеновских изображений в режиме реального времени.
Заранее задают интервал перемещения излучателя, перемещают излучатель относительно объекта исследований и в моменты времени, соответствующие границам заданного интервала перемещения, выполняют запись пары рентгеновских изображений, после регистрации второго изображения совмещают два изображения по характерным точкам на объекте исследований, ориентируют пару изображений таким образом, чтобы линия направления смещения на изображениях была параллельна линии, соединяющей центры глаз наблюдателя, после чего наблюдают объемное рентгеновское изображение.
Выполняют действия, указанные выше, непрерывно в процессе движения излучателя и получают объемное рентгеновское изображение объекта исследования в режиме реального времени.
При этом в отличие от бинокулярной (стереосистемы) используется только один канал регистрирующей аппаратуры. Для перспективы внедрения предложенного способа это очень важно, т.к. стоимость аппаратуры в основном определяется ценой рентгеновской регистрирующей системы (УРИ).
При наблюдении трехмерных рентгеновских изображений, по сравнению с анализом двумерных изображений, как показывает практика, существенно сокращается время распознавания внутренних деталей объекта и значительно возрастает надежность идентификации, например, недозволенных вложений
Круг решаемых прикладных проблем с использованием нашего предложения чрезвычайно широк. Одной из них является изучение методов обнаружения и идентификации взрывчатых веществ.
Использование предложенного способа и устройства для целей организации оперативного досмотра транспортных средств, багажа и ручной клади позволит разработать принципиально новую технологию таможенного контроля, основанную на комплексе портативных приборов автоматизированного рентгеновского контроля.
В области рентгеновской интроскопии предложенный способ и устройство могут быть в определенной мере использованы для других типов неразрушающего контроля, в том числе изотопного и ультразвукового.
Весьма актуально автоматизировать контроль динамики изменений в объектах или процессах, например, для процессов лазерной сварки и резки материалов.
Для оперативного наблюдения трехмерных рентгеновских изображений на фоне реальных объектов в процессе диагностики дополнительно применены стерео очки-дисплеи типа «See-Throw, надеваемые на голову человека-оператора, непосредственно выполняющего оперативную диагностику или контроль объектов по трехмерным рентгеновским изображениям в режиме реального времени.
Новизна нашего предложения состоит в том, что формирование трехмерного рентгеновского изображения производится в режиме реального времени непосредственно во время диагностики, на основе фрейм структурированной модели объекта с отображением трехмерного изображения на мониторе компьютера или нашлемном дисплее.
Для определения моментов времени регистрации двух исходных рентгеновских изображений используется структурная трехмерная модель объекта, инвариантная к изменениям масштаба и поворотам. В процессе формирования объемного изображения выполняется непрерывное уточнение и дополнение модели на основе текущих рентгеновских изображений, основанное на принципах, подобных механизмам работы нижнего уровня визуальной коры мозга.
Максимальное сохранение исходной информации и возможность получения объемных изображений в режиме реального времени обусловлены тем, что в предложенном способе получения объемных изображений используются простые геометрические преобразования только двух рентгеновских изображений, параметры которых рассчитываются по структурной трехмерной модели объекта регистрации.
Для диагностики биологических объектов из-за большей сложности и неопределенности их внутренней структуры, по сравнению с техническими объектами, гораздо сильнее проявляются преимущества разработанных методов трехмерной рентгеновской диагностики, особенно для оперативной диагностики подвижных (живых) организмов в медицине и ветеринарии.
Следует отметить, что оперативность получения информации, а также ее достоверность определяют во многих случаях своевременность и правильность выбора лечебной тактики и саму возможность проведения операции, а в ряде случаев и судьбу пациента.
Основная цель предложенного способа и устройства анализа пространственной структуры объекта по рентгеновским изображениям состоит в получении объемного (стереоскопического) изображения, позволяющего врачу рентгенологу оперативно в режиме реального времени выполнять диагностику различных заболеваний внутренних органов или проводить оперативное вмешательство непосредственно под контролем по трехмерному рентгеновскому изображению.
Кроме того, известные методы не позволяют выполнять позиционирование по трем координатам хирургических инструментов относительно зоны интереса в режиме рентгеноскопии, непосредственно во время проведения операции.
Наши исследования и многочисленные эксперименты на фантомах доказали на практике принципиальную возможность обеспечения надежной и высокоточной локализации зоны интереса объекта и совмещения с ней медицинских инструментов по трем координатам непосредственно в ходе операции.
Были проведены экспериментальные исследования с использованием различных фантомов и стандартного рентгеновского оборудования отечественного производства (рентгеновский аппарат РУМ 20М и усилитель рентгеновского изображения УРИ М2) без изменения его конструкции, с использованием методов и технических средств, позволяющих получать рентгеновское изображение на мониторе в объемном виде в реальном масштабе времени.
Сравнительный анализ точности позиционирования инструмента по глубине и времени на выполнение операции по обычному (двумерному) изображению и трехмерному рентгеновскому изображению, наблюдаемому в реальном масштабе времени, подтвердил эффективность предложенного способа и устройства.
В том случае, когда нам известно линейное смещение камеры относительно неподвижного объекта, расстояние до объекта вычисляется по известной формуле:
где di - расстояние (дальность) до объекта;
Δl - смещение регистрирующего устройства (РУ);
ΔXi - смещение изображения объекта;
f - фокусное расстояние объектива телекамеры (ТК).
На фиг.1 упрощенно представлена схема определения расстояния до составных частей наблюдаемых объектов, используемая в предложенном способе.
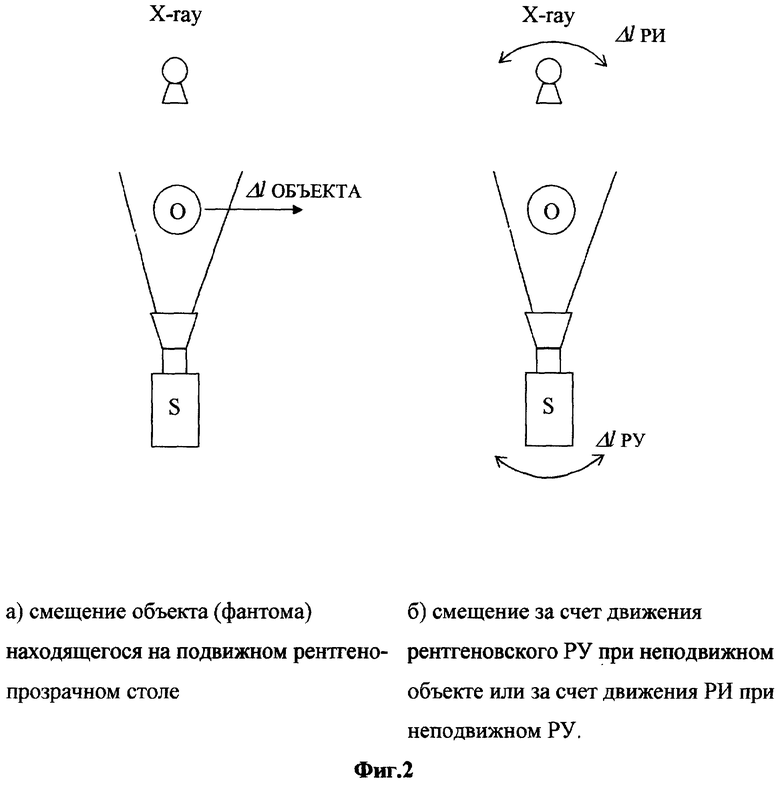
При смещении регистрирующего устройства S на расстояние А1 изображение составных частей объекта О1 и О2, находящихся на разной дальности от камеры, смещаются на расстояние ΔХ1 и ΔХ2 соответственно. Были экспериментально исследованы на фантомах несколько случаев взаимного движения "Объект - РУ":
- перемещение объекта относительно неподвижного РУ (фиг.2а);
- наблюдение неподвижного объекта подвижным РУ (фиг.2б);
- наблюдение неподвижного объекта неподвижным РУ при перемещении РИ (фиг.2б).
Кроме того, исследованы различные способы измерения взаимного движения "Объект - РУ", в том числе с использованием специальных маркеров или реперов, селекцией характерных точек (признаков), а также - при использовании поля векторов движения без распознавания каких-либо признаков формы объекта.
В последнем случае параметры движения (скорость, направление) и пространственные градиенты распределения векторов скорости определяются, например, с использованием пространственного спектра изображения объекта, в данном случае рентгеновского, проанализированного с помощью специального процессора.
Точность измерений перемещений пациента или оборудования определяется, как показали предварительные исследования, не столько погрешностью датчиков механизмов перемещения, сколько возможностью динамической коррекции смещений органов пациента во время сеанса наблюдения.
Это обусловлено тем, что для предложенного способа получения двух изображений с разных положений необходимо компенсировать естественные смещения (пульсации сосудов, движений, связанных с дыханием и пр.) за время между двумя моментами времени регистрации, автоматически определяемыми непосредственно по рентгеновскому изображению либо по сигналам от датчика перемещения стола или механизма перемещения РУ и рентгеновского аппарата.
Предложены способ и устройство получения объемного рентгеновского изображения в динамике на основе принципа «видение в движении» (viewing-in-moving), позволяющие наблюдать объекты в режиме реального времени объемно и точно определять их пространственное положение.
Перемещают рентгеновский излучатель относительно объекта исследований, регистрируют рентгеновское изображение приемником и записывают кадры рентгеновского изображения в кадровую память с последующим отображением на дисплее.
Заранее задают интервал перемещения излучателя, перемещают излучатель относительно объекта исследований и в моменты времени, соответствующие границам заданного интервала перемещения, выполняют запись пары рентгеновских изображений, после регистрации второго изображения совмещают два изображения по характерным точкам на объекте исследований, ориентируют пару изображений таким образом, чтобы линия направления смещения на изображениях была параллельна линии, соединяющей центры глаз наблюдателя, после чего наблюдают объемное рентгеновское изображение.
Выполняют действия, указанные выше, непрерывно в процессе движения излучателя и получают объемное рентгеновское изображение объекта исследования в режиме реального времени.
Используют движение объекта исследования относительно излучателя для определения моментов записи пары рентгеновских изображений.
Выполняют автоматически управление записью пары изображений по результатам идентификации характерных точек рентгеновского изображения и измерению величины и направления их смещения на паре изображений.
Выполняют ручное перемещение излучателя или объекта исследований на заданный интервал перемещения.
Выполняют свободное перемещение излучателя или объекта исследований в пределах заданных направлений перемещения.
Корректируют геометрические (проективные) искажения и при необходимости корректируют масштабы (Zoom) пары рентгеновских изображений для улучшения качества наблюдаемых объемных рентгеновских изображений.
Корректируют геометрические искажения рентгеновского тракта: излучатель-приемник, для чего используют, например, сетку из рентгеноконтрастного материала, которую помещают вместо объекта исследования, регистрируют рентгеновское изображение сетки и вычисляют поправки для компенсации геометрических искажений рентгеновского тракта для улучшения точности совмещения и качества наблюдения объемного изображения.
Способ получения трехмерных рентгеновских изображений для оперативной диагностики и неразрушающего контроля технических и биологических объектов, при котором в процессе движения объекта исследования относительно рентгеновского излучателя получают и запоминают рентгеновские изображения, после чего формируют пару стереоскопического изображения и поочередно отображают их для наблюдения раздельно левым и правым глазами оператора-наблюдателя, отличающийся тем, что формирование серии стереоскопического изображения производится непрерывно, непосредственно во время движения рентгеновского излучателя относительно объекта исследования или движения объекта исследования относительно рентгеновского излучателя, при этом выполняется автоматическое управление запоминанием и отображением пар стереоскопического изображения по результатам автоматической идентификации характерных точек рентгеновского изображения и автоматическому измерению величины и направления их смещения на паре рентгеновских изображений.
Устройство получения трехмерных рентгеновских изображений для оперативной диагностики и неразрушающего контроля технических и биологических объектов (фиг.3) состоит из рентгеновского излучателя 1, создающего серию рентгеновских изображений, объекта исследования 2, с использованием механизма перемещения 4, имеющего датчик положения 9 и регистрирующее устройство (приемник) 3, которое через устройство запоминания (хранения) изображений 5 и коммутирующее устройство 6 на устройстве отображения 7 визуализирует для оператора-наблюдателя 8 серию трехмерных рентгеновских изображений объекта исследовании, при этом выход регистрирующего устройства 3 дополнительно соединен со вторым входом коммутирующего устройства. В устройстве предусмотрен формирователь сигналов записи и коммутации 10, вход которого соединен с выходом датчика положения 9 механизма 4, а два его выхода соединены соответственно со входом коммутатора 6 и устройства запоминания 5. Механизм 4 снабжен датчиком, а формирователь сигналов записи и коммутации изображений 10 выполнен в виде последовательно включенных измерителя интервалов перемещений и порогового устройства с двумя выходами: управления записью изображения в устройстве 5 и управления поочередной коммутацией изображения в устройстве 6.
Для оперативного наблюдения трехмерных рентгеновских изображений на фоне реальных объектов в процессе диагностики дополнительно применены стерео очки-дисплеи 11 типа "See-Throw", надеваемые на голову человека оператора, непосредственно выполняющего оперативную диагностику или контроль объектов по трехмерным рентгеновским изображениям в режиме реального времени.
Предложенный способ и устройство позволяют реализовать трехмерный рентгеновский контроль и диагностику технических и биологических объектов в режиме реального времени, в том числе путем модернизации имеющегося рентгеновского оборудования.
Источники информации
1. Рентгенотехника. Справочник в 2-х книгах. Под ред. чл.-корр. АН СССР В.В.Клюева. М.: Машиностроение, 1992 г.
2. Коновалов А.Н., Корниенко В.Н. Компьютерная томография в нейрохирургической клинике. М.: Медицина, 1985 г.
3. Стереоскопия и новые методы наблюдения трехмерных изображений. Сб. под ред. В.Л.Симонова. М.: Наука, 1989 г.
4. WO 03039213 A2, VREX INC, SWIFT DAVID, FARIS SADEG M, 08.05.2003 «Трехмерная стереоскопическая рентгеновская система».
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХМЕРНЫЙ РЕНТГЕНОВСКИЙ ПРОСМОТР В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2012 |
|
RU2622367C2 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛИЗАЦИИ В КАРДИОХИРУРГИИ | 2015 |
|
RU2607948C2 |
| СПОСОБ КОГНИТИВНОГО ВОСПРИЯТИЯ ПЛОСКИХ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2500004C2 |
| Оптическое устройство для объемного восприятия плоского изображения | 2017 |
|
RU2658579C1 |
| СПОСОБ ТРЕНИНГА КОГНИТИВНОГО ВОСПРИЯТИЯ | 2012 |
|
RU2489743C1 |
| ОБЪЕМНЫЙ ДИСПЛЕЙ И СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2526901C1 |
| СПОСОБ ФОРМИРОВАНИЯ И НАБЛЮДЕНИЯ СТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ ДЛЯ ПЕРЕМЕЩАЮЩЕГОСЯ НАБЛЮДАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1991 |
|
RU2116704C1 |
| ОБЪЕМНЫЙ ДИСПЛЕЙ | 2018 |
|
RU2718777C2 |
| СПОСОБ ФОРМИРОВАНИЯ СТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ НА ЭКРАНЕ ДИСПЛЕЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1991 |
|
RU2117414C1 |
| Устройство для формирования объёмного изображения в трёхмерном пространстве с реальными объектами | 2017 |
|
RU2664781C1 |

Использование: для получения трехмерных рентгеновских изображений. Сущность: заключается в том, что в процессе движения рентгеновского излучателя относительно объекта исследования получают и запоминают рентгеновские изображения, после чего формируют пары стереоскопического изображения и поочередно отображают их для наблюдения раздельно левым и правым глазом оператора-наблюдателя, отличающийся тем, что заранее задают интервал перемещения излучателя, перемещают излучатель относительно объекта исследований и непрерывно в процессе движения излучателя в моменты времени, соответствующие границам заданного интервала перемещения, выполняют запись пары рентгеновских изображений, после регистрации второго изображения совмещают два изображения по характерным точкам на объекте исследований, ориентируют пару изображений таким образом, чтобы линия направления смещения на изображениях была параллельна линии, соединяющей центры глаз наблюдателя, после чего наблюдают объемное рентгеновское изображение в режиме реального времени. Технический результат: получение объемного рентгеновского изображения объекта исследования в режиме реального времени. 2 з.п. ф-лы, 3 ил.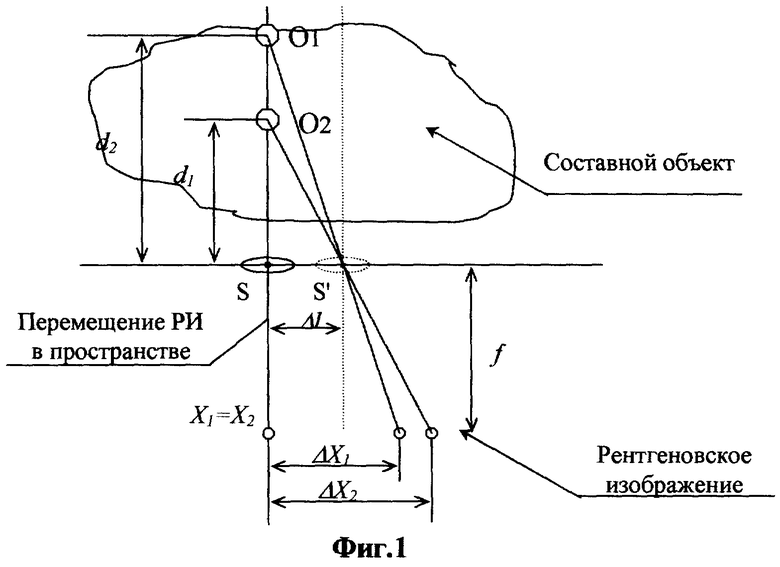
| WO 03039213 A2, 08.05.2003 | |||
| СПОСОБ ФОРМИРОВАНИЯ СТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ НА ЭКРАНЕ ДИСПЛЕЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1991 |
|
RU2117414C1 |
| СПОСОБ ФОРМИРОВАНИЯ СТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ НА ЭКРАНЕ ДИСПЛЕЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1991 |
|
RU2117414C1 |
| US 6206566 B1, 27.03.2001. | |||

