Изобретение относится медицинской технике, в частности к способам и устройствам визуализации на основе рентгеновской стереоскопии, и может быть использовано в кардиохирургии для объемной визуализации внутренних камер сердца, сосудов, хирургического эндокардиального инструмента и карт электрической активности миокарда при лечении аритмий сердца методом катетерной аблации.
Хирургическое вмешательство при лечении аритмий методом катетерной аблации предусматривает следующую последовательность операций: в камеры сердца под рентгеноскопическим контролем вводят эндокардиальные электроды, проводят манипуляцию электродами, регистрируют и изучают последовательности сигналов электрического возбуждения миокарда для поиска местоположения источников аритмии. При нахождении таких источников их активность подавляют воздействием тепла, образованного, к примеру, прохождением токов высокой частоты. Для этого необходимо выполнить манипуляции по установке лечебного электрода в зону источника аритмии. Особенностью метода катетерной аблации является отсутствие прямого визуального контроля за инструментом при выполнении манипуляций. В ходе операции для контроля положения электродов традиционно применяют рентгеноскопию (Н.М. Федотов, А.И. Оферкин, А.А. Шелупанов. Метод комплексирования данных ротационной рентгенографии и электрической локации для визуализации анатомических структур сердца и хирургического инструмента // Доклады ТУСУРа. - 2012. - №2 (26), часть 2. - С. 231-236.). Но обычная рентгеноскопия представляет возможность отчетливо наблюдать только за положением в пространстве электродов на плоскости и имеет ограничения в связи с невозможностью объемного восприятия области обследования и невозможностью дифференцировать участки патологической и здоровой ткани миокарда. В настоящее время в дополнение к рентгеновским системам визуализации в клинической практике применяют и системы нерентгеноскопической визуализации (Carto ХР, NavX, Биоток), позволяющие создавать виртуальные трехмерные поверхности внутренних структур сердца и визуализировать на них характеристики миокарда в виде изохронных карт активации. Такие системы позволили также сократить время рентгеноскопии и обеспечили возможность наблюдения за положением виртуальных образов эндокардиальных электродов в реальном времени. Для улучшения восприятия операционного пространства такие системы имеют возможность совмещения заранее подготовленных с помощью КТ или МРТ 3D объектов с пространством системы навигации. Но наличие 3D объектов еще не означает наличие объемного восприятия, трехмерные объекты визуализируются на плоскости и в этом случае трехмерная информация изображения показывается только с помощью специальных методов визуализации объема: модели освещения, эффекты тени. Есть проблемы и с качеством совмещения объектов, созданных в разное время и на разном оборудовании. Системы нерентгеноскопической визуализации подвержены влияниям артефактов сердечных сокращений и дыхания. Системы с использованием метода электрической локации обладают искажениями, связанными с неоднородностью электрической проводимости тканей тела пациента. Кроме того, совсем исключить рентгеноскопию из технологического процесса лечения нельзя, так как не будет обеспечен достоверный контроль за положением инструмента.
Объемное восприятие исследуемого объекта может обеспечить стереовизуализация, в том числе рентгеновская. И хотя рентгеновская стереовизуализация известна с самого начала развития медицинской и дефектоскопической рентгеновской техники, она активно развиваться стала только в последние десятилетия, когда получили массовое развитие эффективные средства визуализации стереоизображений в реальном времени. К тому же в медицине способ получения трехмерных изображений с помощью рентгеноскопии вытеснила томография, а рентгеновские аппараты совершенствовались только в визуализации динамических объектов и по пути получения более высокого разрешения изображений (такие, как, например, ангиографические системы Allura Xper FD20). Недостатки томографии в целом заключаются в отсутствие реального времени и высокой дозе облучения (в случае рентгеновской томографии). Рентгеновская же стереовизуализация для восприятия операционного поля - это фактически 3D томография реального времени, при этом отлично воспринимается в объеме позиция инструмента. Преимущество такой визуализации достигается, в первую очередь, при манипуляциях и позиционировании инструмента, т.е. для наблюдения за динамическими высококонтрастными объектами в объеме в реальном времени с дозами облучения, как при обычной рентгеноскопии. Недостатком же рентгеновской стереоскопии, как и обычной моноплановой рентгеноскопии, является отсутствие возможности дифференцировать участки патологической и здоровой ткани миокарда, что для применения в кардиохирургии при лечении аритмий сердца недостаточно, так как невозможно выполнять операции по совмещению инструмента и мишени для лечебного воздействия.
Из ближайших аналогов предлагаемого изобретения представляют интерес следующие технические решения.
Например, способ визуализации и устройство в виде рентгеновской системы и связанной с ней системой магнитной локации электродов MediGuide™ (Piorkowski, С. and Hindricks, G. Nonfluoroscopic sensor-guided navigation of intracardiac electrophysiology catheters within prerecorded cine loops. Circ Arrhythm Electrophysiol. 2011; 4: e36-e38).
Устройство содержит: рентгеновский блок для просвечивания области обследования как минимум в двух проекциях, с возможностью записи и хранения последовательности рентгеноскопических изображений сердечного цикла в двух проекциях; блок магнитной локации (блок непрерывного слежения за текущим положением конструктивно связан с приемником рентгеновского излучения) содержит генератор магнитного поля, миниатюрный датчик магнитного поля, располагаемый в инструменте; устройство сбора и хранения текущих данных сенсора, опорного сенсора и ЭКГ; средства для синхронизации цикла воспроизведения рентгеновской записи с ЭКГ; устройство визуализации (монитор).
Способ функционирования данного устройства заключается в следующем: записывают последовательность рентгеноскопических изображений сердечного цикла, например, в двух проекциях; вычисляют текущие трехмерные координаты сенсора, размещенного внутри электрода, с помощью системы магнитной локации; сопоставляют координаты электродов с их положением относительно приемника рентгеновского излучения; создают 3D объекты изображений электродов; выполняют операцию рендеринга по обработке 3D объектов изображений электродов для получения их двумерных изображений и совмещают полученные двумерные изображения электродов с изображениями циклических рентгеноскопических записей для двух проекций в динамическом режиме; визуализируют полученные последовательности совмещенных изображений двух проекций синхронно с реальным сердечным циклом; при необходимости по одной из проекций вместо записанной последовательности включают реальное рентгеновское излучение; сигналы опорного сенсора, размещенного на груди, и ЭКГ используют для изоляции реального перемещения электрода от артефактов сокращения сердца и дыхания.
Устройство предназначено для применения в кардиохирургии для улучшения качества восприятия области обследования при манипулировании инструментом на фоне циклической рентгеноскопической предварительно выполненной записи и сокращения времени рентгеноскопии. Обеспечивается динамический режим визуализации. Система магнитной локации конструктивно связана с приемником рентгеновского излучения, что позволяет с высокой точностью связать системы координат системы локации и устройства рентгеноскопии и позволяет автоматически привязывать координаты и траектории перемещения электродов к рентгеновскому изображению. Так как на поверхности груди пациента есть опорный сенсор, случайное смещение позиции приемника излучения не приводит к смещению изображения электрода относительно записи.
Недостатком данного способа и устройства его реализующего является то, что: требуются специальные электроды с датчиками магнитного поля, что ограничивает возможности врача по выбору тактики лечения; нет стереовизуализации и, следовательно, объемного восприятия области обследования, все объекты визуализируются в итоге как двухмерные в двух независимых проекциях; нет карт активации миокарда, следовательно, устройство самостоятельно не определяет зоны патологии и не позволяет решить задачу по совмещению лечебного электрода с областью лечебного воздействия. Кроме того, у пациентов с ожирением или пациентов с дряблой кожей возможно смещение опорных датчиков на коже, движение которых влияет на точность слеживания за инструментом. Могут быть пропущены эпизоды проколов камер сердца, вызванные механическими усилиями на катетер, и лечение может быть начато с запозданием.
Известно также устройство обработки медицинских изображений (см. патент США 9036777 Ohishi, et al. «Medical image processing apparatus». Опубл. 19.05.2015) и способ его функционирования. Устройство обработки медицинских изображений содержит: блок визуализации, выполненный с возможностью визуализации пораженного участка в двух направлениях с использованием рентгеновских лучей; блок генерации рентгеноскопических изображений, сконфигурированный для создания двух рентгеновских изображений, соответствующих двум направлениям, на основе сигналов изображений, выводимых из блока визуализации; блок рендеринга, выполненный с возможностью проецирования данных трехмерных изображений области обследования, полученных заранее, по двум направлениям в соответствии с той же геометрией, которая используется для визуализации пары рентгеновских изображений, чтобы таким образом генерировать два изображения области обследования; и блок совмещения изображений, выполненный с возможностью объединения рентгеновских изображений с изображениями рендеринга области обследования для каждого соответствующего направления, чтобы таким образом генерировать изображения в двух направлениях, связанных параллаксом, и для вывода двух сгенерированных изображений, связанных параллаксом, на стереомониторное устройство.
Способ функционирования устройства обработки медицинских изображений заключается в следующем: 3D объекты области обследования подготавливают заранее, например, с помощью КТ (или МРТ), но в тоже время 3D объект может создаваться во время операции, для этого сосуды заполняют рентгеноконтрастным веществом, затем выполняют субтракцию и реконструкцию 3D объектов методом Фельдкампа. Совмещают изображения, путем объединения рентгеновских изображений с изображениями рендеринга 3D объектов области обследования для каждого соответствующего направления, чтобы таким образом генерировать изображения в двух направлениях, связанных параллаксом, и выводят два сгенерированных изображения, связанные параллаксом на стереомониторное устройство. Слежение за инструментом в 3D объекте осуществляют путем совмещения изображений реальной рентгеновской стереоскопии с соответствующими проекциями 3D объектов.
Данное изобретение предназначено для применения в хирургии головы с целью улучшения качества восприятия области обследования методом стереоскопической визуализации. Стереоскопическое изображение решает задачу точной манипуляции катетером без каких-либо ошибок вокруг пораженного участка аневризмы в голове пациента, даже в области, в которой кровеносные сосуды расположены сложным и запутанным образом, и позволяет оператору легко воспринимать в пространстве позиционное соотношение кровеносных сосудов.
Недостатком изобретения является отсутствие возможности визуализации электрофизиологических параметров области обследования, что ограничивает его применение в хирургии аритмий сердца для целей визуализации очагов аритмий и для точного совмещения с ними хирургического инструмента.
Прототипом предлагаемого изобретения является техническое решение на способ и устройство визуализации для медицины (см. патент США 7035371 Method and device for medical imaging. Опубл. 25.04.2006, заявл. 16.03.2005). В данном изобретении представлен способ и устройство визуализации для применения во время интервенционных или хирургических вмешательств. Способ и устройство позволяют улучшить ориентацию оператора в области исследования и ускорить манипуляции.
Способ характеризуется тем, что два рентгеноскопических изображения области исследования, полученных со стереоскопическим параллаксом как пара двумерных изображений, и два изображения с соответствующим стереоскопическим параллаксом, вычисленные из данных 3D изображения области исследования, отображают стереоскопически с наложением друг на друга. Двумерные изображения рентгеноскопии области исследования получают с помощью рентгеноскопической системы и привязывают к заранее записанным данным 3D изображения области исследования. Заранее записанные 3D изображения могут быть получены, например, с помощью известных методов 3D визуализации, таких как компьютерная томография, магнитно-резонансная томография, позитронно-эмиссионной томография или с помощью ультразвуковой 3D техники. Данные для получения 3D изображения также могут быть записаны с помощью используемого рентгеновского устройства, например, в виде 3D изображений ангиографии (с введением контраста).
Двумерные изображения рентгеноскопии каждой пары записывают с использованием двух рентгеновских трубок, отделенных друг от друга на определенное расстояние на общий детектор непосредственно друг за другом во времени, чтобы избежать артефактов движения.
Устройство для выполнения данного способа содержит систему рентгеноскопии, в частности моноплановую или биплановую рентгеновскую систему, для записи двумерных рентгеноскопических изображений области исследования со стереоскопическим параллаксом; блок памяти для хранения данных 3D изображений области исследования; блок геометрической привязки записанных двумерных изображений рентгеноскопии с данными 3D изображения; блок рендеринга для вычисления двух двумерных изображений из данных 3D изображения, соответствующих геометрии двумерных изображений рентгеноскопии; устройство совмещения для взвешенного наложения на вычисленные изображения геометрически связанных с ними рентгеноскопических изображений и стереоскопического дисплея для стереоскопической визуализации совмещенных изображений. Термин «рендеринг» понимается как вычисление двумерного представления трехмерного набора данных изображения.
Недостатки прототипа: сложная для оператора процедура геометрической привязки изображений, которые находятся в несвязанных между собой системах координат и масштабах. Для этого необходимо заранее предусматривать рентгеноконтрастные опорные точки или другие процедуры, которые затягивают время операции; сами по себе трехмерные изображения области исследования, подготовленные заранее, не содержат информации об электрофизиологическом нарушении и, следовательно, не решают задачу управления по наведению хирургического инструмента на мишень для воздействия; для решения этой задачи требуется, чтобы трехмерное изображение было жестко привязано к системе координат рентгеноскопической системы и на нем можно было визуализировать параметры электрической активности миокарда, с возможностью визуализации мишеней для воздействия.
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в повышении точности и сокращении времени на выполнение манипуляций при совмещении хирургического инструмента с мишенью для аблации в условиях, когда нет возможности прямого визуального наблюдения как инструмента, так и области аритмии в миокарде.
Названный технический результат достигается реализацией способа стереоскопической визуализации области обследования путем взвешенного совмещения стереопар рентгеновских изображений области обследования, которые получают с помощью рентгеновского стереоскопического устройства, для чего просвечивают область обследования с двух направлений, соответствующих углам стереоскопического зрения, со стереопарами изображений, полученных путем рендеринга 3D объектов, принадлежащих той же области обследования для направлений, соответствующих углам просвечивания рентгеновскими лучами, причем 3D объекты создают непосредственно в процессе обследования и выполнения кардиохирургической операции на том же рентгеновском стереоскопическом устройстве путем определения координат теневых отметок эндокардиальных электродов на рентгеновских изображениях, в виде трехмерной поверхности внутреннего пространства камеры сердца с визуализацией на ней карт электрической активности миокарда. Карта электрической активности миокарда формируется с помощью устройства регистрации электрограмм по электрическим сигналам на внутрисердечных электродах.
Стереоскопическая визуализация с совмещением изображений дает врачу оптимальную ориентацию при манипуляции инструментом в области исследования во время хирургического вмешательства. Кроме того, 3D объекты получают в виде трехмерных поверхностей по ограниченному набору позиций эндокардиальных электродов непосредственно во время вмешательства, на одном и том же рентгеновском оборудовании, что позволяет автоматически и с высокой точностью выполнить совмещение 3D объектов и изображений рентгеновской стереоскопии. Далее на полученном 3D объекте визуализируется карта активации миокарда, что позволяет быстро и с высокой точностью выполнить совмещение инструмента с точкой лечебного воздействия.
Построение 3D объектов в виде трехмерных поверхностей по ограниченному набору позиций известно из уровня техники по использованию в ряде серийных устройств нерентгеноскопической визуализации (например, Carto ХР), также известны способы визуализации карт активации миокарда на трехмерных поверхностях (там же).
Стереоскопическая визуализация с совмещением изображений может быть реализована различными способами. Стереоскопические методы отображения известны в частности из области компьютерного зрения, например, для того, чтобы оператор мог воспринимать стереоскопический эффект, используют затворные очки. С помощью данного способа и соответствующего устройства оператору представлены данные 3D-изображения с двух разных направлений стереоскопического просмотра таким образом, чтобы с помощью стереомонитора у оператора формировалось пространственное впечатление трехмерного набора данных. Поскольку двухмерные изображения рентгеноскопии также записаны из этих двух направлений наблюдения, инструменты, отображаемые в этих изображениях, могут быть представлены в пространстве.
Предлагаемое изобретение иллюстрируется с помощью схем и изображений.
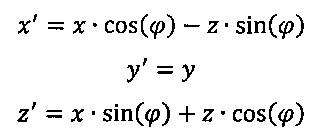
На фиг. 1 представлена структурная схема устройства визуализации.
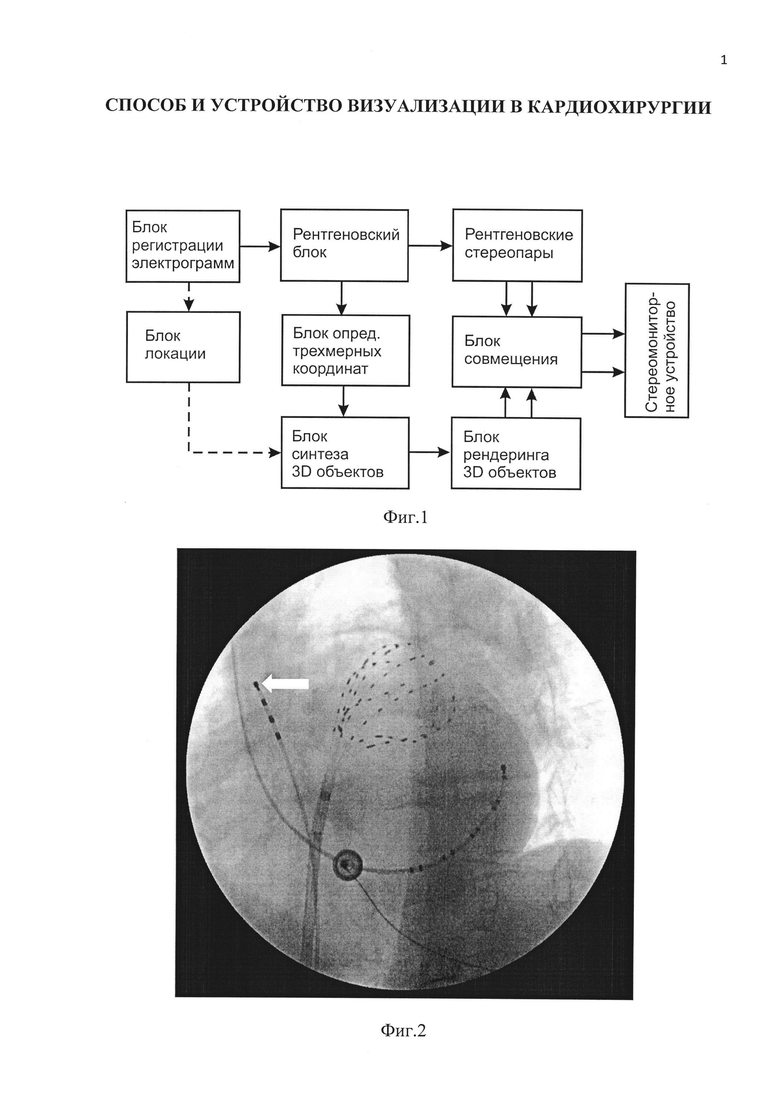
На фиг. 2 показан пример теневых отметок эндокардиальных электродов на рентгеновских изображениях, стрелка указывает на положение дистального полюса электрода.
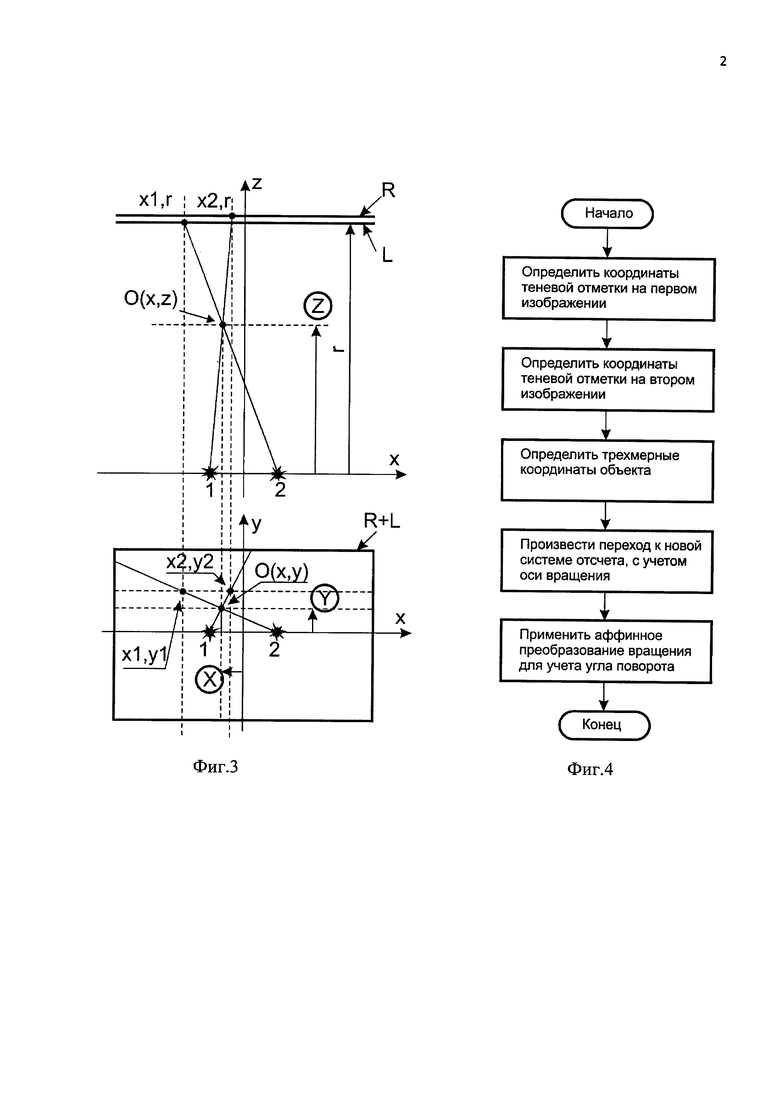
На фиг. 3 изображена схема расположения рентгеновских излучателей 1 и 2, приемника, формирующего правое R и левое L рентгеновские изображения, объекта О, линий направления излучения через объект О до плоскости приемника, теневых отметок объекта на приемнике. Обозначения: x1, y1, c2, y2 - координаты теневых отметок объекта на правом R и левом L рентгеновских изображениях; r - расстояние от излучателей до плоскости приемника. На схеме в верхней части правое R и левое L рентгеновские изображения показаны раздельно для наглядности, на самом деле они находятся в одной плоскости, так как получаются с помощью одного приемника.
На фиг. 4 представлена последовательность операций для измерения координат электродов по их теневым отметкам.
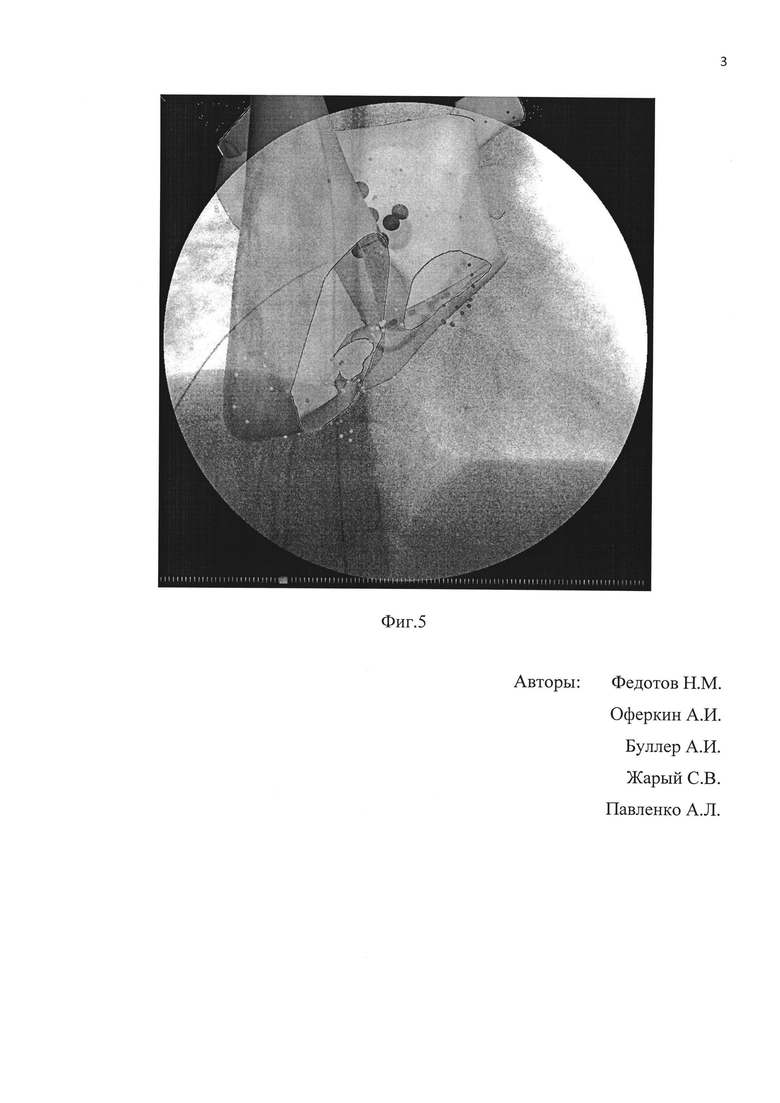
На фиг. 5 приведено изображение скриншота с монитора результирующего изображения области исследования левого предсердия с картой активации миокарда.
Предлагаемый способ визуализации реализуется следующим образом. Совмещают с заданными весовыми коэффициентами и визуализируют с помощью стереомониторной системы стереопары рентгеновских изображений области обследования, которые получают с помощью рентгеновского блока при просвечивании области обследования с двух направлений, соответствующих углам стереоскопического зрения, со стереопарами изображений, которые получают путем рендеринга 3D объектов, принадлежащих той же области обследования для направлений, соответствующих углам просвечивания рентгеновскими лучами. 3D объекты получают в виде трехмерных поверхностей, соответствующих внутренним поверхностям камер сердца и сосудов, принадлежащих области обследования. 3D объекты получают непосредственно в процессе обследования и выполнения кардиохирургической операции. Для этого в камеры сердца и сосуды вводят хирургические инструменты, представляющие собой эндокардиальные электроды, проводят манипуляцию электродами внутри камер сердца и сосудов и одновременно получают стереопары рентгеновских изображений области обследования, на которых присутствуют теневые отметки позиций электродов, по которым вычисляют и запоминают трехмерные координаты множества позиций электродов в различных положениях. По запомненному множеству позиций создают трехмерную поверхность исследуемого органа, на которой визуализируют параметры электрограмм. Для этого каждой запомненной позиции сопоставляют электрограмму, зарегистрированную электродом в соответствующей позиции.
На трехмерной поверхности исследуемого органа визуализируют в виде карт параметры электрограмм, которые получают путем интерполяции данных, принадлежащих соответствующим запомненным позициям электродов, при этом упомянутые карты представляют собой электрическую активность миокарда в виде изохронной карты, либо карты распределения амплитуд электрограмм, либо карты фазового анализа электрограмм, либо карты скорости проведения электрического возбуждения, либо карты распределения доминантных частот электрограмм.
Рентгеновские стереопары предпочтительно получают в одну и ту же фазу сердечного цикла, для чего момент получения рентгеновской стереопары синхронизируют с R-зубцом сигнала ЭКГ по команде блока регистрации электрограмм.
Формируют также виртуальный 3D объект дистальной части электрода, совмещают его с данными 3D объекта исследуемого органа и путем рендеринга получают стереопары, соответствующие углам просвечивания рентгеновскими лучами.
Во время пауз рентгеновского излучения возможен контроль текущего положения дистальной части электрода с помощью устройства электрической локации, для чего по текущим координатам устройства электрической локации формируют 3D объект дистальной части электрода, синхронизируют в пространстве с 3D объектом дистальной части электрода, сформированным по координатам, которые определяют по теневым отметкам в последнем стереоскопическом рентгеновском изображении.
Предлагаемое устройство визуализации содержит рентгеновский блок (см. фиг. 1), позволяющий создавать стереопары рентгеновских изображений области исследования, блок рендеринга 3D объектов, позволяющий создавать стереопары изображений из 3D объектов, принадлежащих той же области обследования и с угловыми направлениями, определяемыми углами просвечивания рентгеновского блока, блок совмещения рентгеновских стереопар со стереопарами блока рендеринга 3D объектов, создающий в виде взвешенной суммы два совмещенных изображения, пригодных для передачи и визуализации с помощью стереомониторного устройства, блок синтеза 3D объектов, позволяющий создавать 3D объекты в виде трехмерных поверхностей органов, принадлежащих области исследования, блок определения трехмерных координат электродов по положению теневых отметок упомянутых электродов на изображениях рентгеновских стереопар и блок регистрации электрограмм, имеющий возможность электропроводного соединения с эндокардиальными электродами, размещаемыми во внутреннем пространстве органов, принадлежащих области исследования.
Дополнительно к выходу блока регистрации электрограмм может быть подключен вход, а ко входу блока синтеза 3D объектов - выход блока электрической локации электродов, представляющего собой генератор электрических сигналов локации, имеющий выходы для соединения с пациентом для формирования в теле пациента градиентных электрических полей и имеющий средства для вычисления координат по электрическим сигналам электродов, размещенных в камерах сердца пациента, и передачи координат электродов в блок синтеза 3D объектов.
В состав рентгеновского блока входят двухфокусный излучатель и общий приемник, причем фокусы рентгеновских трубок двухфокусного излучателя разнесены на такое расстояние, которое обеспечивает угол стереоскопического зрения (параллакс), не более 12 градусов.
Предлагаемое устройство визуализации работает в соответствии с описанным выше способом.
Предложенная группа изобретений является новой и промышленно применимой.
Новизна способа визуализации заключается в том, что 3D объекты получают в виде трехмерных поверхностей, соответствующих внутренним поверхностям камер сердца и сосудов, принадлежащих области обследования, что 3D объекты получают непосредственно в процессе обследования и выполнения кардиохирургической операции, что для этого используют эндокардиальные электроды и вычисляют трехмерные координаты позиций электродов по их теневым отметкам на стереопарах рентгеновских изображений области обследования. Использование электродов для построения 3D объектов позволяет автоматически сопоставлять данные электрической активности миокарда с позицией электрода на получаемой трехмерной поверхности.
Новизна предлагаемого устройства визуализации заключается в отсутствие геометрических искажений, присущих 3D объектам систем нерентгеноскопической визуализации, что обусловлено линейностью распространения рентгеновских лучей в теле пациента. В построении трехмерной камеры сердца, основанной на определении позиций электродов с визуализацией на ней результатов топической диагностики, выполненной с помощью блока параллельной регистрации электрограмм. В комплексировании данных, полученных из стереопар рентгеновских изображений, координат электродов электрической локации и результатов топической диагностики для выполнения аблации и контроля совмещения позиций аблационного электрода и положения мишени для аблации.
Совокупность технических решений приводит в результате к повышению точности и сокращению времени на выполнение манипуляций при наведении хирургического инструмента на мишень для аблации в условиях, когда нет возможности прямого визуального наблюдения как инструмента, так и области аритмии в миокарде.
Областью применения способа и устройства визуализации являются медицинские комплексы, предназначенные для работы в кардиохирургических отделениях аритмологического профиля лечебных учреждений при проведении малоинвазивных хирургических операциях на сердце методами катетерной аблации.
Способ и устройство визуализации были реализованы на практике в виде медицинского комплекса, опытный образец которого изготовлен путем модификации и комплексирования серийных образцов медицинской техники производства ООО «Лаборатория медицинской электроники «Биоток» (Комплекс компьютеризированный для электрофизиологических исследований и наблюдения за режимами работы ЭКС и ДРЧ «БИОТОК», ТУ 9444-002-42371130-2007; Комплекс трехмерной локации электродов эндокардиальных катетеров «Биоток», ТУ 9444-005-42371130-2007; Электродеструктор проводящих путей сердца радиочастотный компьютеризированный ЭД-50-01-«БИОТОК», ТУ 9444-003-42371130-2010; Комплекс для интервенционных процедур рентгеновский ротационный «Биоток-XR», ТУ 9442-006-42371130-2011) и подготовленного программного обеспечения.
В серийный комплекс для интервенционных процедур рентгеновский ротационный «Биоток-XR» установлен дополнительный 15 кВт моноблок таким образом, что расстояние между фокусами рентгеновских трубок моноблоков составило 140 мм.
Технические характеристики рентгеновского блока. Рентгеновский генератор:
- тип два моноблочных;
- макс, мощность каждого генератора 15 кВт;
- рентгеновская трубка двухфокусная с вращающимся анодом с фокусными пятнами 0,3/0,6 мм;
- анодное напряжение 40-120 кВ;
- импульсная рентгеноскопия до 100 мА;
- частота кадров в импульсном режиме до 60 кадр/с;
- ширина импульса 10 мс.
Приемник:
- плоский детектор Dexela 2923 FPD фирмы PerkinElmer, Inc.;
- размер рабочей области 290×230 мм;
- размер пиксела 75 мкм;
- макс. разрешение 3888×3072 пикс;
- макс. частота кадров/сек (при разрешении 1536×1944) 60 кадр/с;
- динамический диапазон 74 дБ.
Приемник общий для двух генераторов. В комплексе реализован импульсный режим излучения с синхронизацией от R зубца ЭКГ. Импульсы при получении стереопары изображений формируются последовательно друг за другом, чтобы избежать артефактов движения тканей сердца и инструмента. При этом длительность импульсов составляла 10 мс с интервалом следования в паре не более 3 мс. Одновременно с импульсами излучения для формирования рентгеновской стереопары выполняется запоминание координаты точки в блоке электрической локации для использования в дальнейшем для привязки систем координат.
В качестве стереомониторной системы использован стереоскопический широкоформатный ЖК-монитор АОС 27'' D2769VH с поляризационной технологией и разрешением 1920×1080.
Для определения трехмерных координат рентгеноконтрастного объекта по его теневым отметкам (пример теневой отметки см. на фиг. 2) на рентгеновских стереопарах определяют двухмерные координаты объекта непосредственно на левом (x1,y1) и правом (x2,y2) рентгеновских изображениях области обследования (см. фиг. 3) и затем по полученным двухмерным координатам вычисляют трехмерные координаты (х,y,z).
Для вычисления трехмерных координат использовано уравнение прямой в канонической форме.
Чтобы определить координаты, нужно записать два уравнения прямых и составить из них систему уравнений.
За начало координат принята точка, расположенная между двумя излучателями на равном расстоянии (фиг. 3). Также определяется, что:
r - расстояние от точки, расположенной между двумя излучателями, до плоскости приемника;
dx - расстояние от излучателя до начала координат;
rc - расстояние от начала координат до оси вращения.
Таким образом: координаты рентгеновских излучателей 1 и 2 соответственно будут (-dx,0,0) и (dx,0,0) и координаты теневых отметок объекта на приемник правого и левого излучателей (x1,y1,r) и (z2,y2,r). Искомые координаты объекта обозначают как О (x,y,z).
Таким образом, система уравнений для определения координат (z,y,z) выглядит следующим образом:
Решение системы уравнений:


Для случая, когда штатив имеет возможность вращения, координата z перемещается в центр вращения:

В этом случае применяют аффинное преобразование вращения на угол ϕ вокруг оси y.
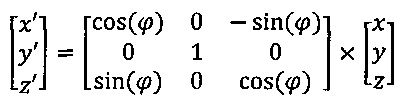
При умножении матрицы на вектор получаются следующие формулы вычисления координат:
Блок-схема алгоритма определения трехмерных координат объекта с использованием стереопары представлена на фиг. 4.
Определять координаты проекций объекта на каждом из изображений, составляющих стереопару, можно вручную, автоматически или полуавтоматически. Для автоматического и полуавтоматического определения координат объекта могут быть использованы алгоритмы Хафа в различных вариантах, алгоритмы выделения контрастных объектов, методы машинного зрения.
Эффективность технического решения, достоверность и точность достигнутых результатов реализации подтверждены проверкой в клинических условиях. Комплекс с программным обеспечением был использован во время проведения катетерных операций на проводящей системе сердца в операционной отделения сосудистой хирургии клиник ГОУ ВПО «Сибирский государственный медицинский университет» Росздрава, г. Томск под руководством Оферкина А.И. Всем пациентам стандартно по методике Сельдингера через бедренные и подключичные сосуды вводились диагностические многополюсные электроды и под рентгеновским стереоскопическим и электрофизиологическим контролем устанавливались в стандартные позиции: коронарный синус, область пучка Гиса, правое и левое предсердия, правый и левый желудочки. После этого через бедренные сосуды по Сельдингеру вводился аблационный электрод и под рентгеновским стереоскопическим контролем устанавливался в полостях сердца. Затем выполнялось построение камеры сердца с одновременным выполнением картирования и стереоскопической визуализации рентгеновских изображений и совмещенного с ним трехмерного изображения построенной камеры сердца.
С использованием устройства прооперировано 3 пациента с нарушениями сердечного ритма. Устройство использовалось для стереоскопической визуализации и слежения за положением диагностических и аблационных катетеров во время манипуляций. Было построено несколько десятков объектов сердца. Для построения правого и левого предсердий измеряли координаты от 15 до 30 позиций электродов; для легочных, верхней и нижней полых вен, восходящей аорты - до 5; коронарного синуса - 6; левого и правого желудочков - по 16; легочного ствола и легочных вен - по 8. Отмечено хорошее визуальное соответствие геометрии построенных объектов реальным структурам сердца.
Устройство электрической локации электродов использовалось в паузах рентгеновского излучения. Так как данное устройство локации отличается высоким разрешением и высокой относительной точностью определения координат, но большой абсолютной погрешностью, была применена периодическая привязка координат к последнему значению, полученному с помощью рентгеновского стереоскопического блока. Это позволило поддерживать значение абсолютного отклонения в определении координат менее чем в 2 мм, а визуально различимое смещение электрода составило менее 1 мм. Такая точность определения координат является приемлемой для прецизионного совмещения лечебного электрода диаметром 2,5 мм и длиной 4 мм с аномальной зоной миокарда. При этом время рентгеноскопии не превысило 3-5 мин. Такое значительное снижение общего времени рентгеноскопии достигается при синхронизации импульсов излучения во время формировании рентгеновской стереопары с R зубцом ЭКГ. При этом создается квазистатическое рентгеновское стереоскопическое изображение, которое совмещается также со статическими изображениями, полученными путем рендеринга 3D объектов.
Комплекс показал высокую надежность в работе и отличное качество визуализации электродов, области исследования и трехмерных объектов камер сердца. К примеру, на фиг. 5 приведено изображение скриншота с монитора одного изображения стереопары области исследования левого предсердия с картой активации миокарда.
Группа изобретений относится медицинской технике, в частности к способам и устройствам визуализации на основе рентгеновской стереоскопии, и может быть использовано в кардиохирургии для объемной визуализации внутренних камер сердца, сосудов, хирургического эндокардиального инструмента и карт электрической активности миокарда при лечении аритмий сердца методом катетерной аблации. Способ визуализации заключается в том, что совмещают с заданными весовыми коэффициентами и визуализируют с помощью стереомониторной системы стереопары рентгеновских изображений области обследования, которые получают при просвечивании области обследования с двух направлений, соответствующих углам стереоскопического зрения, со стереопарами изображений, которые получают путем рендеринга 3D-объектов, принадлежащих той же области обследования для направлений, соответствующих углам просвечивания рентгеновскими лучами. При этом 3D-объекты получают непосредственно в процессе обследования и выполнения кардиохирургической операции в виде трехмерных поверхностей, соответствующих внутренним поверхностям камер сердца и сосудов, принадлежащих области обследования, для чего в камеры сердца и сосуды вводят хирургические инструменты, представляющие собой эндокардиальные электроды, проводят манипуляцию электродами внутри камер сердца и сосудов и одновременно получают стереопары рентгеновских изображений области обследования, на которых присутствуют теневые отметки позиций электродов, по которым вычисляют и запоминают трехмерные координаты множества позиций электродов в различных положениях. По запомненному множеству позиций создают трехмерную поверхность исследуемого органа, на которой визуализируют параметры электрограмм, для этого каждой запомненной позиции сопоставляют электрограмму, зарегистрированную электродом в соответствующей позиции. Устройство визуализации содержит рентгеновский блок, позволяющий создавать стереопары рентгеновских изображений области обследования, блок рендеринга 3D-объектов, блок совмещения рентгеновских стереопар со стереопарами блока рендеринга 3D-объектов, создающий в виде взвешенной суммы два совмещенных изображения для передачи и визуализации с помощью стереомониторного устройства. Дополнительно установлены блок синтеза 3D-объектов в виде трехмерных поверхностей органов, блок определения трехмерных координат эндокардиальных электродов и блок регистрации электрограмм, соединенный с эндокардиальными электродами, размещаемыми во внутреннем пространстве органов, принадлежащих области обследования. Использование изобретений позволяет повысить точность и сократить время на выполнение манипуляций при наведении хирургического инструмента на мишень для абляции в условиях, когда нет возможности прямого визуального наблюдения как инструмента, так и области аритмии в миокарде. 2 н. и 6 з.п. ф-лы, 5 ил.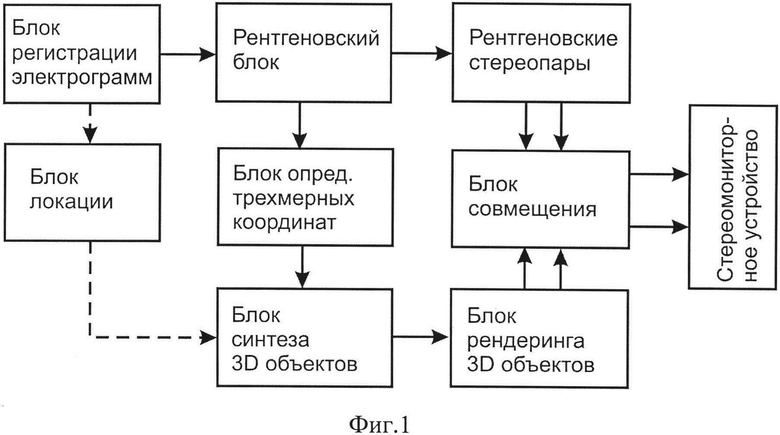
1. Способ визуализации в кардиохирургии, для чего совмещают с заданными весовыми коэффициентами и визуализируют с помощью стереомониторной системы стереопары рентгеновских изображений области обследования, которые получают с помощью рентгеновского блока при просвечивании области обследования с двух направлений, соответствующих углам стереоскопического зрения, со стереопарами изображений, которые получают путем рендеринга 3D объектов, принадлежащих той же области обследования для направлений, соответствующих углам просвечивания рентгеновскими лучами, отличающийся тем, что упомянутые 3D объекты получают непосредственно в процессе обследования и выполнения кардиохирургической операции в виде трехмерных поверхностей, соответствующих внутренним поверхностям камер сердца и сосудов, принадлежащих области обследования, для чего в камеры сердца и сосуды вводят хирургические инструменты, представляющие собой эндокардиальные электроды, проводят манипуляцию электродами внутри камер сердца и сосудов и одновременно получают стереопары рентгеновских изображений области обследования, на которых присутствуют теневые отметки позиций электродов, по которым вычисляют и запоминают трехмерные координаты множества позиций электродов в различных положениях, по запомненному множеству позиций создают трехмерную поверхность исследуемого органа, на которой визуализируют параметры электрограмм, для этого каждой запомненной позиции сопоставляют электрограмму, зарегистрированную электродом в соответствующей позиции.
2. Способ по п. 1, отличающийся тем, что на трехмерной поверхности исследуемого органа визуализируют в виде карт параметры электрограмм, которые получают путем интерполяции данных, принадлежащих соответствующим запомненным позициям электродов, при этом упомянутые карты представляют собой электрическую активность миокарда в виде изохронной карты, либо карты распределения амплитуд электрограмм, либо карты фазового анализа электрограмм, либо карты скорости проведения электрического возбуждения, либо карты распределения доминантных частот электрограмм.
3. Способ по п. 1, отличающийся тем, что рентгеновские стереопары получают в одну и ту же фазу сердечного цикла, для чего момент получения рентгеновской стереопары синхронизируют с R-зубцом сигнала ЭКГ.
4. Способ по п. 1, отличающийся тем, что формируют 3D объект дистальной части электрода, совмещают его с данными 3D объекта исследуемого органа и путем рендеринга получают стереопары, соответствующие углам просвечивания рентгеновскими лучами.
5. Способ по п. 4, отличающийся тем, что во время пауз рентгеновского излучения контролируют текущее положение дистальной части электрода с помощью устройства электрической локации, для чего по текущим координатам устройства электрической локации формируют 3D объект дистальной части электрода, синхронизируют в пространстве с 3D объектом дистальной части электрода, сформированным по координатам, которые определяют по теневым отметкам в последнем стереоскопическом рентгеновском изображении.
6. Устройство визуализации в кардиохирургии, содержащее рентгеновский блок, позволяющий создавать стереопары рентгеновских изображений области обследования, блок рендеринга 3D объектов, позволяющий создавать стереопары изображений из 3D объектов, принадлежащих той же области обследования и с угловыми направлениями, определяемыми углами просвечивания рентгеновского блока, блок совмещения рентгеновских стереопар со стереопарами блока рендеринга 3D объектов, создающий в виде взвешенной суммы два совмещенных изображения, пригодных для передачи и визуализации с помощью стереомониторного устройства, отличающееся тем, что добавлены блок синтеза 3D объектов, позволяющий создавать 3D объекты в виде трехмерных поверхностей органов, принадлежащих области обследования, блок определения трехмерных координат эндокардиальных электродов по положению теневых отметок упомянутых электродов на изображениях рентгеновских стереопар и блок регистрации электрограмм, имеющий возможность электропроводного соединения с эндокардиальными электродами, размещаемыми во внутреннем пространстве органов, принадлежащих области обследования.
7. Устройство по п. 6, отличающееся тем, что к выходу блока регистрации электрограмм подключен вход, а ко входу блока синтеза 3D объектов - выход блока электрической локации электродов, представляющего собой генератор электрических сигналов локации, имеющий выходы для соединения с пациентом для формирования в теле пациента градиентных электрических полей и имеющий средства для вычисления координат по электрическим сигналам электродов, размещенных в камерах сердца пациента, и передачи координат электродов в блок синтеза 3D объектов.
8. Устройство п. 6, отличающееся тем, что в составе рентгеновского блока есть двухфокусный излучатель и общий приемник, причем фокусы рентгеновских трубок двухфокусного излучателя разнесены на такое расстояние, которое обеспечивает угол стереоскопического зрения (параллакс) не более 12 градусов.
| US 2013218024 A1, 22.08.2013 | |||
| US 2005207529 A1, 22.09.2005 | |||
| US 2010040196 A1, 18.02.2010 | |||
| US 2015087965 A1, 26.03.2015 | |||
| УСТРОЙСТВО ПОЛУЧЕНИЯ РЕНТГЕНОВСКИХ ИЗОБРАЖЕНИЙ | 2009 |
|
RU2480158C2 |
| ЦИФРОВОЙ СКАНИРУЮЩИЙ РЕНТГЕНОДИАГНОСТИЧЕСКИЙ АППАРАТ | 2002 |
|
RU2217055C1 |

