Изобретение относится к радиотехнике, в частности к радиолокации, и может быть использовано для повышения точности измерения параметров поля коллиматора на компактных радиоизмерительных комплексах (РИК).
Известны способы измерения поля коллиматора, заключающиеся в формировании сферического поля в фокальной плоскости коллиматора, облучении им коллиматора и регистрации параметров поля с помощью приемной антенны (зонда) при ее движении в плоскости параллельной фокальной плоскости коллиматора [1. Страхав А.Ф. Автоматизированные антенные измерения. - М.: Радио и связь, 1985. - 136 стр., ил., стр.25, 106-107, а также 2. Майзельс Е.И., Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей/ под ред. М.А.Колосова, М.: Советское радио, 1972, 232 стр., стр.102].
Эти способы измерения основаны на использовании имеющейся в составе РИК измерительной системы с планарным сканированием зонда в раскрыве коллиматора. Такая регистрирующая система (называемая координатно сканирующим устройством (КСУ)) со временем сама подвержена воздействию дестабилизирующих факторов, и ее использование для измерения амплитудно-фазового распределения (АФР) поля коллиматора приводит к дополнительным погрешностям измерений. При этом если случайные погрешности могут быть уменьшены за счет усреднения результатов многократных измерений, то систематические погрешности КСУ этим способом не устраняются.
В процессе измерений поля коллиматора всегда присутствуют погрешности измерений, обусловленные различными источниками (неточность позиционирования КСУ, погрешность регистрации параметров поля аппаратурой регистрации и др.).
Введем функции Е(r) и G(r). E(r) описывает АФР поля коллиматора в плоскости сканирования, a G(r) учитывает систематические погрешности КСУ, связанные с отклонением зонда от планарного движения. Опишем их с помощью комплексных функций в виде:
E(r)=(E0(r))exp(-i{ϕE(r)})
G(r)=G0(r)exp(-ik(m(r)-l(r)))
где Е0(r) и ϕE(r) распределение амплитуды и фазы поля коллиматора в точке r(х, у) плоскости измерения, G0(r) - амплитудная весовая функция КСУ, m(r) и l(r) систематическое и случайное отклонение КСУ от плоскости измерения, k=2π - волновое число.
При регистрации АФР поля с помощью КСУ, при движении зонда по раскрыву коллиматора, результатом измерений будет произведение двух функций

E(r)G(r)=(E0(r)G0(r)exp(-i(kl(r)+km(r)+ϕE(r)))
Выражение (1) записано без учета погрешностей регистрации амплитуды и фазы. Если их дополнительно учесть, то (1) следует записать в виде:

где ΔY0 и Δϕ погрешности измерений амплитуды и фазы соответственно.
В свою очередь погрешности измерений амплитуды и фазы складываются из следующих составляющих, обусловленных следующими факторами: неточность позиционирования КСУ (систематическая (ξ1) и случайная (η1)), неточность регистрации амплитуды (случайная (η21)), неточность регистрации фазы (случайная (η22)).
ΔE0=|ξ1|+|η1|+η21

Из формул видно, что в измеренных существующим методом значениях поля присутствуют все составляющие погрешностей измерений.
Наиболее близким по технической сущности к предлагаемому способу является способ измерения поля коллиматора, включающий формирование сферического поля в фокальной плоскости коллиматора, облучение им коллиматора и измерение поля отраженного коллиматором с помощью КСУ [Страхав А.Ф. Автоматизированные антенные измерения. - М.: Радио и связь, 1985. - 136 с., ил., стр.25, 106-107]. Основной недостаток способа состоит в том, что при измерении АФР поля коллиматора описанным выше образом не учитываются систематические погрешности измерений, обусловленные отклонением движения зонда от планарного.
Техническим результатом данного изобретения является повышение точности измерений АФР поля коллиматора.
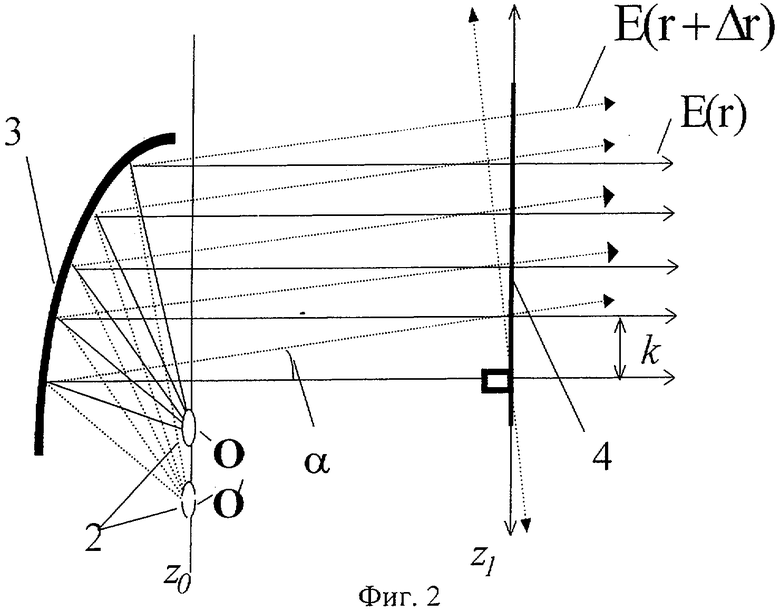
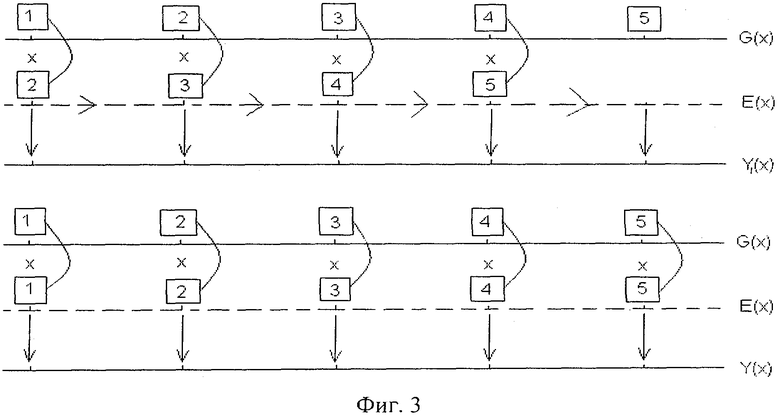
Указанный результат достигается тем, что в способе измерения поля коллиматора, включающем: формирование сферического поля в фокальной плоскости коллиматора, облучение им коллиматора и измерение поля, отраженного коллиматором с помощью координатно-сканирующего устройства (КСУ), дополнительно формируют сферическую волну с другой точки фокальной плоскости коллиматора (см. фиг.2), так, чтобы смещение поля в плоскости измерения (см. фиг.3) было кратным шагу сканирования, повторно измеряют отраженное от коллиматора поле, на основе двух измерений решают систему разностных уравнений
Y(r)=E(r)G(r)

r - координата точки измерения,
Y(r) - функция, описывающая результаты измерения поля, отраженного коллиматором 8,
E(r) - функция описывает АФР поля коллиматора в плоскости сканирования 6,
G(r) - учитывает систематические погрешности КСУ, связанные с его отклонением от планарного движения 7,
Y1(r) - функция, описывающая результаты измерения поля отраженного коллиматором при смещенном коллиматоре,
Е(r+Δr) - описывает АФР поля коллиматора в плоскости сканирования при смещенном в фокальной плоскости коллиматора облучателе,
Δr - приращение координаты точки измерения,
и проводят оценку амплитудно-фазового распределения поля коллиматора с компенсацией систематических погрешностей вносимых КСУ по формуле:
E(rn-1)=E(r1)A1...An-2
где Е(rn) - значение поля коллиматора в n-ой точке регистрации,
An=E(rn)/E(rn+1).
Сущность изобретения заключается в том, что дополнительно формируют сферическую волну с другой точки фокальной плоскости коллиматора так, чтобы смешение поля в плоскости измерения было кратным шагу сканирования, повторно измеряют отраженное от коллиматора поле, на основе двух измерений составляют и решают систему разностных уравнений. Предлагаемая последовательность действий при измерении поля коллиматора позволяет провести оценку амплитудно-фазового распределения поля коллиматора с компенсацией систематических погрешностей, вносимых КСУ, что позволяет повысить точность измерения поля коллиматора.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ измерения поля коллиматора, включающий формирование сферической волны с двух точек фокальной плоскости коллиматора так, чтобы смещение поля в плоскости измерения было кратным шагу сканирования, повторное измерение отраженного от коллиматора поле, решение системы разностных уравнений, составленных на основе двух измерений, позволяющий повысить точность измерения АФР поля коллиматора.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что измерение поля коллиматора, включающее формирование сферической волны с двух точек фокальной плоскости коллиматора, так, чтобы смешение поля в плоскости измерения было кратным шагу сканирования, повторное измерение отраженного от коллиматора поле, решение системы разностных уравнений составленных на основе двух измерений приводит к повышению точности измерения АФР поля.
Предлагаемое техническое решение промышленно применимо, так как для реализации предлагаемого способа измерения поля коллиматора, могут быть использованы измерительные процедуры, не требующие дополнительных материальных затрат и научных исследований. Данное изобретение может быть использовано при измерении поля коллиматора на РИК.
Пояснить принципа повышения точности измерения АФР поля коллиматора можно следующим образом. При сканировании с помощью КСУ поля коллиматора в некоторой плоскости z, которая может быть выбрана произвольно, экспериментально получают результаты измерений.
Результатом измерений будет функция Y(r) (произведение Е(r) и G(r)).
Y(r)=E(r)G(r)
Затем, получив результаты измерений, производится повторное измерение параметров поля, со смещением облучателя в фокальной плоскости так, чтобы смещение поля в плоскости регистрации было равно (кратно) шагу сканирования k. Перемещение облучателя в фокальной плоскости коллиматора из точки О в точку О' приведет к смещению волнового фронта облучающего поля и дополнительного поворота поля на угол α, который
 где
где
d - величина смещения облучателя (расстояние между точками О и О');
f - фокусное расстояние коллиматора
легко учесть и пересчитать поле в плоскость регистрации.
В результате второго измерения получим уравнение вида:
Y1(r)=E(r+Δr)G(r)
Объединим уравнения в систему:
Y(r)=E(r)G(r)

Решая систему (5) возможно оценить поле с учетом погрешностей вносимых КСУ с точностью до некоторого постоянного коэффициента Е(r1).
В результате обработки получим следующие известные данные:
Y(r1)=E(r1)G(r1) Y(r2)=Е(r2)G(r2)......Y(rn)=E(rn)G(rn)
Y1(r1)=E(r2)G(r1) Y1(r2)=Е(r3)G(r2)......Y1(rn)=E(rn+1)G(rn)
Если найти отношение между соседними отсчетами для случаев со сдвигом облучателя в фокальной плоскости коллиматора и без сдвига Y1(r1)/Y(r1), то получим:
E(r1)/E(r2)=A1;
E(r2)/E(r3)=A2;
............

Из ряда значений (6) можно выразить коэффициенты Е(ri) через Е(r1):
Е(r2)=Е(r1)А1;
E(r3)=E(r2)A2=E(r1)A1A2
............
E(rn-1)=E(r1)A1A2...An-2
Таким образом, становится понятен принцип повышения измерения поля коллиматора.
При применении принципа, описанного выше, возможно исключить погрешности, связанные с неточностью позиционирования КСУ, и тем самым повысить точность измерения параметров поля коллиматора, тогда выражения (3) для ΔY0 и Δϕ примут вид:
ΔY0=η21
Δϕ=η1+η22
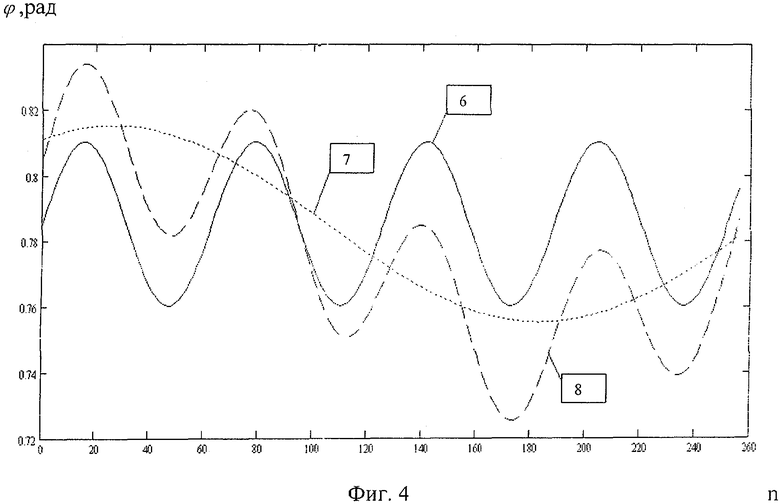
На фиг.1 представлена структурная схема устройства, реализующего заявленный способ измерения поля коллиматора. На фиг.2 графически представлен принцип измерения поля коллиматора. На фиг.3 схематически пояснен процесс измерений поля коллиматора предложенным методом. На фиг.4 графически представлены результаты моделирования проведенного авторами. На фиг.5 представлена структурная схема алгоритма обработки результатов измерений в вычислительном устройстве, состоящая из 3-х последовательно выполняемых блоков.
Устройство, реализующее заявленный способ измерения поля коллиматора и представленное на фиг.1, содержит последовательно соединенные устройство смещения облучателя - 1, облучатель - 2, коллиматор - 3, координатно-сканирующее устройство - 4, вычислительное устройство - 5.
На фиг.2 изображены: облучатель - 2, коллиматор - 3, КСУ - 4.
На фиг.4 графически представлены моделируемое фазовое распределение (ФР) поля коллиматора - 6, функция, учитывающая погрешности, вносимые КСУ в измерения ФР поля - 7, ФР поля, получаемое при существующем методе измерения поля коллиматора - 8.
Устройство, реализующее предложенный способ, работает следующим образом. Облучатель 2 облучает коллиматор 3 сферическим полем. Поле, отраженное коллиматором 3, регистрируется КСУ 4, и результаты поступают на вычислительное устройство 5. Потом облучатель 2 смещается, с помощью устройства смещения облучателя 1 в фокальной плоскости коллиматора, так, чтобы смещение поля в плоскости сканирования было кратно шагу сканирования, и на вычислительное устройство 5 поступают результаты измерения поля при смещенном облучателе. Вычислительное устройство 5 обрабатывает результаты измерения и рассчитывает АФР поля коллиматора с учетом систематических погрешностей вносимых КСУ.
Для оценки технического результата предложенного способа измерения параметров поля коллиматора, по сравнению с известным, можно привести следующие соображения. В известном способе измерение АФР поля коллиматора производится с помощью КСУ входящей в состав РИК. При этом не принимается во внимание тот факт, что регистрирующая система подвержена воздействию дестабилизирующих факторов. То есть можно заключить, что эффективность мероприятий, используемых в известном способе измерения поля облучения РИК, ограничена. Предлагаемый способ направлен на повышение точности измерения АФР поля облучения в рабочем объеме измерительных комплексов. Последнее достигается тем, что определяются и компенсируются систематические погрешности измерений, связанные с движением КСУ в плоскости сканирования.
Моделирование, проведенное авторами на математической модели, показало возможность разделения АФР поля коллиматора и систематических погрешностей вносимых КСУ и повышение точности измерения поля коллиматора.
Эффективность предлагаемого способа моделировалось на примере РИК. Условия моделирования по исходным данным (длине волны и шагу сканирования) совпадали с типовыми, принятыми на РИК (λ=3.2 см; шаг сканирования 1.6 см; размер массива данных 256 комплексных точек).
В результате расчетов с использованием разработанного алгоритма, в отсутствие случайных погрешностей измерений, измеренное поле совпадает с моделируемым ФР поля коллиматора 6 (см. фиг.4).
Таким образом, у заявляемого решения появляется новое свойство, заключающееся в компенсации систематических погрешностей, связанных с неточностью позиционирования КСУ, обеспечивающее повышение точности измерения поля облучения РИК.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный компактный полигон | 2018 |
|
RU2694636C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ И МНОГОПОЗИЦИОННЫЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516221C2 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЦЕЛЕЙ | 1997 |
|
RU2125275C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА УСИЛЕНИЯ АКТИВНЫХ ФАР | 1989 |
|
SU1841122A1 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИЧЕСКИХ ХАРАКТЕРИСТИК ОПТИЧЕСКИХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1993 |
|
RU2078307C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА И ФОКУСИРОВКИ ОПТИЧЕСКОЙ СИСТЕМЫ | 1991 |
|
RU2018101C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2325666C2 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЦЕЛЕЙ | 1994 |
|
RU2093852C1 |

Предложенное изобретение относится к радиотехнике, в частности к радиолокации, и может быть использовано для повышения точности измерения параметров поля коллиматора на компактных радиоизмерительных комплексах. Техническим результатом данного изобретения является повышение точности измерений амплитудно-фазового распределения поля коллиматора. Способ измерения поля коллиматора заключается в формировании сферического поля в фокальной плоскости коллиматора, облучении им коллиматора и измерении поля, отраженного коллиматором, с помощью координатно-сканирующего устройства (КСУ), после чего дополнительно формируют сферическую волну с другой точки фокальной плоскости коллиматора так, чтобы смешение поля в плоскости измерения было кратным шагу сканирования, повторно измеряют отраженное от коллиматора поле, на основе двух измерений производят оценку амплитудно-фазового распределения поля коллиматора с компенсацией систематических погрешностей, вносимых КСУ. 5 ил.
Способ измерения поля коллиматора, включающий формирование сферического поля в фокальной плоскости коллиматора, облучение им коллиматора и измерение поля, отраженного коллиматором, с помощью координатно-сканирующего устройства (КСУ), отличающийся тем, что дополнительно формируют сферическую волну с другой точки фокальной плоскости коллиматора так, чтобы смешение поля в плоскости измерения было кратным шагу сканирования, повторно измеряют отраженное от коллиматора поле, на основе двух измерений составляют и решают систему разностных уравнений
Y(r)=E(r)G(r);
Y1(r)=E(r+Δr)G(r);
где r - координата точки измерения;
Y(r) - функция, описывающая результаты измерения поля, отраженного коллиматором;
E(r) - функция, описывающая амплитудно-фазового распределения (АФР) поля коллиматора в плоскости сканирования;
G(r) - функция, учитывающая систематические погрешности КСУ, связанные с его отклонением от планарного движения;
Y1(r) - функция, описывающая результаты измерения поля, отраженного коллиматором при смещенном облучателе;
Е(r+Δr) - описывает АФР поля коллиматора в плоскости сканирования при смещенном в фокальной плоскости коллиматора облучателе;
Δr - приращение координаты точки измерения,
и проводят оценку амплитудно-фазового распределения поля коллиматора с компенсацией систематических погрешностей, вносимых КСУ, по формуле
E(rn-1)=E(r1)A1...An-2,
где E(rn) - значение поля коллиматора в n-й точке регистрации;
Аn=Е(rn)/Е(rn+1).
| Способ определения диаграммы направленности антенны | 1979 |
|
SU987537A1 |
| Устройство для измерения параметров антенн | 1988 |
|
SU1628016A1 |
| Многоканальное устройство для измерения амплитудно-фазового распределения поля фазированной антенной решетки | 1986 |
|
SU1474563A1 |
| Сучкорез | 1984 |
|
SU1240385A1 |
| US 4542470 A, 17.09.1985. | |||

