Настоящее изобретение относится к области радиоизмерений и может быть использовано для высокоточных измерений коэффициента усиления крупноапертурных активных ФАР в режимах "Прием" и "Передача" в ближней зоне излучения в условиях завода-изготовителя и технической позиции заказчика.
Известны методы измерения КУ антенных устройств методом замещения в сравнении с эталоном, изложенные в монографии А.Ф. Страхова "Автоматизированные антенные измерения", Москва, Радио и связь, § 1, 3, стр. 17÷19.
В методе замещения при ориентации измеряемой антенны главным максимумом ДН на зонд измеряют амплитуду сигнала Ан на выходе антенно-фидерного тракта. Затем, не меняя уровня излучаемой мощности, чувствительности измерителя амплитуды и параметров согласования трактов, на место измеряемой антенны устанавливают и включают эталонную (образцовую) антенну с аттестованными Gэ. Образцовую антенну ориентируют главным максимумом ДН на зонд, и на выходе антенно-фидерного тракта измеряют новое значение амплитуды сигнала Аэ. При идентичности характеристик согласования неизвестное значение КУ измеряемой антенны определяют из соотношения:
Gu=Gэ[Ан/Аэ]2.
Методы измерений и технические средства измерений КУ антенн в ближней зоне излучения описаны в монографии под редакцией А.Д. Бахраха "Методы измерений параметров излучающих систем в ближней зоне излучения". Наука, Ленинград, 1985, стр. 196.
В принципиальном отношении метод дальней и ближней зоны измерения КУ отличаются между собой лишь способом получения и вычисления отношения 
Относительная погрешность расчета КУ, определяемого методом сравнения с образцовой антенной, при линейной поляризации поля обеих антенн и малых погрешностях ограничения и дискретизации оценивается величиной:
где 

Аппаратурно метод измерения КУ в БЗ реализуется комплексам, описанным в вышеупомянутой монографии, функциональное построение которого следующее: планарный сканер, управляемый координатным приводом, осуществляет последовательный обход расчетных точек матрицы. Измерительный зонд с помощью подвижной линии связи, подключенный к выходу генератора зондирующих сигналов, облучает раскрыв измеряемой АУ. Отклики АУ на сигналы по всей совокупности точек матрицы измеряются амплифазометром и фиксируются регистратором амплитудно-фазовых распределений.
В соответствии с накопленным массивом отсчетов осуществляется вычисление пространственных параметров направленности АУ и КУ в соответствии с известными вычислительными алгоритмами.
Именно такой комплекс может быть выбран в качестве прототипа для заявляемого устройства.
К числу недостатков известных методик и устройств измерения ВУ применительно к активным ФАР, осуществляющих преобразование сигнала с СВЧ на ПЧ в раскрыве, необходимо отнести следующие: обычно стабильность спецраспределения, формируемого диаграммообразующими элементами активной ФАР, во время работы и в процессе многочасовых измерений параметров направленности ФАР в ближней зоне излучения может гарантироваться двумя принципиально возможными способами - встроенной системой автофазировки, периодически контролирующей параметры сформированного АФР по калибрующему пилот-сигналу, вводимому в закрытый тракт, либо по эфиру, и поддерживающей параметры АФР в допуске по предварительно выбранному критерию, например, гарантируя заданное значение средне-квадратического отклонения амплитуд и фаз сигналов подрешеток, свидетельствующих о нахождении в допуске пространственных параметров направленности ФАР в режиме "Прием", "Передача";
- аппаратурной избыточностью числа и параметрами надежности подрешеток ФАР, когда исходное спецраспределение формируется таким образом, чтобы даже при выходе из строя определенного числа подрешеток (до 15÷20% от общего количества) пространственные параметры направленности ФАР находились в допуске, оговоренном ТУ. Т.е., по сути, принимается гипотеза о стабильности поддержания АФР как в процессе работы, так и измерений, в промежутке между двумя циклами встроенного контроля, частота и длительность которых соотносятся с основными рабочими режимами на уровне 10-3÷10-4.
Учитывая, что процесс самофазирования также требует временных затрат и связан с возникновением кратковременных переходных процессов установления АФР в раскрыве, совмещение его с измерениями параметров направленности ФАР в ближней зоне излучения требует не только жесткой временной синхронизации циклов перестройки и отсчетов параметров поля, но и жесткой привязки каждого съема к конкретному значению реально отслеживаемого АФР. Следует отметить, что на современном этапе чаще всего приходится иметь дело с активными ФАР, не располагающими возможностями оперативной самофазировки, укладывающейся во временные интервалы, соизмеримые с циклами отсчета двух соседних значений параметров поля в БЗ, при реально существующих скоростях перемещения вертикальной каретки сканера на уровне 10÷20 см/сек. Т.е. аппаратурная избыточность ФАР и долгопериодный встроенный контроль являются реальными техническими решениями, которые приходится принимать во внимание в процессе синтеза систем оперативной и достоверной регистрации КУ АФАР в БЗ.
В связи с тем что рабочие циклы измерений параметров АФАР в БЗ даже в случае использования метода смещенных матриц составляют единицы часов, приходится ставить и решать задачу контроля стабильности реальных значений АФР спецраспределений в раскрыве, в связи с тем что возможные флуктуации АФР АФАР приведут к неоднозначным результатам измерений КУ, которые трудно будет соотнести с параметрами, отраженными в ТУ.
Т.о. одним из наиболее существенных недостатков известных устройств и методов измерения КУ является отсутствие возможности оперативного контроля точности поддержания АФР АУ в процессе измерений, осуществляемых в БЗ.
Известно, однако, что достоверность и точность измерений параметров АУ в БЗ с активно формируемыми спецраспределениями обусловлено суммой погрешностей поддержания АФР в раскрыве и ошибок измерений матриц параметров поля, осуществляемых планарной зондовой системой и амплифазометрическим комплексом в целом.
В связи с этим результирующая точность расчетных интегральных параметров АФАР представляется, как правило, в вероятностной форме, отражающей статистическую природу модели составляющих ошибок, принятых в виде поправок в процессе вычислений. Т.е. достоверность полученных результатов при измерении КУ в БЗ базируется на гипотезе стабильности поддержания спецраспределения раскрыва АФАР и нахождении в допуске составляющих ошибок амплифазометрических измерений.
Средства самодиагностики такой большой системы как АФР совместно с комплексом генераторно-гетеродинного оборудования и амплифазометрического комплекса, управляемого ЭВМ, не обеспечивают оперативного контроля непосредственно в процессе измерений в сквозном режиме как собственно аппаратуры формирования исходного поля, так и средств оперативной регистрации фиксированной матрицы отсчетов.
Проблемы достоверности измерения КУ АФАР существенно усложняются в случае использования для его измерения метода БЗ, специфика которого также ориентирована на последовательное замещение АФАР эталоном. В связи с тем что крупноапертурные АФАР требуют достаточно сложных систем инженерного обеспечения, охлаждения, подвода питающих напряжений и СВЧ сигналов, их переустановка в процессе измерения КУ для строгого замещения эталоном в БЗ излучения, как правило, не производится. В связи с этим для максимального совмещения раскрывов АФАР и эталона прибегают либо к эквивалентному расширению области сканирования, либо к установке специальных линейных зондов, эквивалентов спецраспределений непосредственно над АФАР.
В том и другим случае области сканирования измерительным зондом для АФАР и эталона являются геометрически сложными плоскостями, что еще больше усугубляет проблему достоверности полученных результатов измерений. Будучи обязательно разнесенными во времени, строго говоря, результаты измерений КУ эталона и АФАР могут относиться как к разным состояниям исходного АФР, так и к различным моделям ошибок измерений планарного сканера, связанных с разнесением областей сканирования. Подобные технические приемы измерения КУ не только физически существенно увеличивают область сканирования и время измерений, но и приводят к существенному удорожанию амплифазометрического комплекса, поскольку стоимость планарного сканера, начиная от области сканирования в 2×3 м, растет пропорционально квадрату приращения площади сканирования, не гарантируя требуемой достоверности измерений.
Весьма непросто решается проблема синтеза однородного измерительного тракта КУ, обладающего идентичным с АФАР способом преобразования сигнала с СВЧ на ПЧ. Т.к. известно, что большинство существующих и аттестуемых в установленном порядке вторичных эталонов, используемых в процессе измерения КУ, представляют собой зеркально-линзовые АУ либо рупорные АУ, имеющие выход на СВЧ сигнале. В то же самое время приходится ставить и решать задачу синтеза эталона КУ, имеющего выход на ПЧ сигнал, и преобразующего СВЧ сигнал точно так же, как это осуществляют основные и компенсационные подрешетки ФАР.
В связи со значительным повышением требований к точности и достоверности амплифазометрических комплексов, используемых для настройки и съема параметров АФАР со сверхнизкими уровнями боковых лепестков (см., например, работу Near fields measurements for ultra-lon side-lobe for phased array antenna Hoh. Tanaka, Procudings of ISAP′s′ 85 p.p. 165÷172), авторами синтезированы настоящие предложения по рационализации измерения ВУ крупноапертурных АФАР, изложенные в материалах настоящей заявки, позволяющей при заданном уровне точности планарного сканера обеспечить максимально достижимую достоверность и точность измерения КУ в режиме работы на "Прием", существенно сохраняя общий цикл измерительных процедур без удорожания комплекса.
Цель заявляемого устройства - повышение точности, оперативности и достоверности измерений коэффициента усиления активных ФАР амплифазометрическим методом в ближней зоне излучения.
Поставленная цель достигается тем, что в устройство, содержащее активную ФАР, образованную N×M подрешетками, обеспечивающих преобразование СВЧ сигнала на промежуточную частоту, соединенную своими входами с генераторно-гетеродинным оборудованием, коммутатором подрешеток и системой управления лучом, связанной по выходу с регистратором амплитудно-фазовых распределений, планарный сканер, размещенный в ближней зоне излучения ФАР, параллельно ее раскрыву, обеспечивающий, с помощью механически сочлененного с ним координатного привода, сканирования по плоскости измерительного зонда, связанного с выходом линий передачи сигнала, при этом каретка вертикального перемещения планарного сканера оптически связана с датчиком текущих координат зонда, а также эталонный рупор, дополнительно введены: второй измерительный зонд, размещенный на вертикальной каретке, соосно с первым, схема поразрядного сравнения, приемно-преобразующий модуль подрешетки ФАР, СВЧ переключатель и СВЧ коммутатор, счетчик текущего номера подрешетки, аналоговый коммутатор, промчастотный измеритель амплитуды и фазы сигнала, генератор кодов разметки матрицы, полирупорный облучатель, размещенный по 4-м углам грани активной ФАР и счетчик (N×M+1) импульсов, при этом второй измерительный зонд подключен параллельно к выходу линии передачи сигнала и развернут относительно раскрыва первого на 180°, а плоскости поляризации первого и второго измерительных зондов взаимно ортогональны, раскрыв эталонного рупора, плоскость поляризации которого совпадает с плоскостью поляризации второго измерительного зонда, размещенного на эквидистантном расстоянии зеркально симметрично по отношению к раскрыву ФАР, а их электрические и оптические оси совмещены в пространстве и лежат на одной прямой, выход эталонного рупора связан с сигнальным входом приемно-преобразующего модуля подрешетки ФАР, второй преобразующий вход которого соединен с соответствующим выходом генераторно-гетеродинного оборудования, параллельно подключенным ко входам зондирующих сигналов СВЧ переключателя и коммутатора, первый и второй входы аналогового коммутатора подключены к промчастотному выходу ФАР и выходу приемно-преобразующего модуля подрешеток, управляющий вход аналогового коммутатора связан с выходом счетчика (N×M+1) импульсов, параллельно подключенного ко второму входу промчастотного измерителя амплитуды и фазы сигнала и входу заполнения счетчика текущего номера подрешетки, выход которого соединен со входами регистратора амплитудно-фазовых распределений, коммутатора подрешеток и управляющим входами СВЧ переключателя и коммутатора, по выходам сопряженный соответственно со входом линии передачи сигнала, закрепленной на неподвижной опоре, и с помощью волноводного тракта с полирупорным облучателем, первый и второй входы схемы поразрядного сравнения соответственно связаны с выходами датчика текущих координат зонда и генератора кодов разметки матрицы, параллельно подключенного ко входам координатного привода и регистратора амплитудно-фазовых распределений, выход схемы поразрядного сравнения подключен к первому входу запуска промчастотного измерителя амплитуды и фазы сигналов, сигнальный и опорный входы которого соответственно подключены к выходам аналогового коммутатора и генераторно-гетеродинного оборудования, а его выход параллельно подключен ко входу заполнения счетчика (N×M+1) импульсов и информационному входу регистратора амплитудно-фазовых распределений.
Заявляемое устройство содержит ряд новых узлов, а именно: второй измерительный зонд, размещенный на вертикальной каретке соосно с первым и развернутый по отношению к нему на 180°, параллельно подключенный к выходу линии передачи сигнала, приемно-преобразующий модуль подрешетки ФАР, включенный в рассечку между выходом эталонного рупора и аналогового коммутатора, СВЧ переключатель и СВЧ коммутатор, сопряженный с полирупорным облучателем, размещенным по 4-м углам грани АФАР, счетчик текущего номера подрешетки, подключенный по выходу к счетчику (N×M+1) импульсов, генератор кодов разметки матрицы и ПЧ измеритель амплитуды и фазы сигнала.
Причем их введение в состав устройства, в данной совокупности и функциональном взаимодействии обеспечило достижение положительного эффекта, а именно повышение точности, оперативности и достоверности измерения коэффициента усиления активной ФАР в ближней зоне излучения амплифазометрическим методом.
Кроме того, использование заявляемого устройства позволяет оперативно контролировать точность функционирования амплифазометрического комплекса и исходное АФР АФАР в процессе измерений, используя единообразный измерительный тракт как для съема АФР в раскрыве, так и отсчетов параметров поля. Положительный эффект заявляемого устройства обусловлен максимально достоверными результатами измерения КУ АФАР в сочетании с высокими технико-экономическими параметрами и существенной экономией времени измерений.
Указанная совокупность признаков авторам ранее не была известна. Все признаки во взаимосвязи являются существенными для достижения положительного эффекта и соответствуют критерию "существенные отличия".
Функциональная схема заявляемого устройства изображена на чертеже.
Устройство содержит активную ФАР - 1, образованную N×M подрешетками - 2, осуществляющих преобразование входного СВЧ сигнала на промежуточную частоту. По четырем углам грани АФАР - 1 расположен полирупорный облучатель - 23, ориентированный под углом в направлении к плоскости раскрыва ФАР. Входы АФАР - 1 соответственно сопряжены с выходами системы управления лучом - 3, коммутатора подрешеток - 4 и генераторно-гетеродинного оборудования - 5.
Параллельно раскрыву ФАР - 1 размещен в ближней зоне излучения планарный сканер - 6, механически сочлененный с координатным приводом - 7, обеспечивающим перемещение вертикальной каретки сканера - 8 с размещенным на ней первым измерительным зондом - 9, подключенным к выходу линии передачи сигнала - 10 по расчетным точкам матрицы отсчетов поля. Соосно с первым измерительным зондом - 9 на каретке вертикального перемещения - 8 размещен второй измерительный зонд - 11, развернутый своим раскрывом по отношению к первому на 180°, плоскость поляризации которого, совпадающая с плоскостью поляризации вибраторов ФАР - 1, ортогональна по отношению к плоскости поляризации второго измерительного зонда - 11, параллельно с первым подключенным к выходу линии передачи сигнала - 10. Координаты 1 и 2 измерительных зондов - 9, 11 отсчитываются с помощью датчика текущих координат - 12, например, оптически связанного с кареткой вертикального перемещения - 8.
Первый и второй входы схемы поразрядного сравнения - 13 соответственно связаны с выходами датчика текущих координат - 12 и генератора кодов разметки матрицы - 14, параллельно соединенного со входами регистратора амплитудно-фазовых распределений - 15 и координатного привода - 7.
Эталонный рупор - 16, плоскость поляризации которого параллельна плоскости поляризации второго измерительного зонда - 11, расположен на эквидистантном расстоянии, зеркально симметрично по отношению к раскрыву ФАР - 1. При этом электрические и оптические оси ФАР - 1 и эталонного рупора - 16 совмещены в пространстве и лежат на одной прямой. Выход схемы поразрядного сравнения - 13 соединен с первым входом запуска ПЧ измерителя амплитуды и фазы сигналов - 24, сигнальный и опорный входы которого соответственно связаны с выходами аналогового коммутатора - 17 и генераторно-гетеродинного оборудования - 5. Первый и второй выходы аналогового коммутатора - 17 соответственно соединены с выходами ФАР - 1 и приемно-преобразующим модулем подрешетки - 18, связанным с выходами эталонного рупора, генераторно-гетеродинного оборудования - 5, выход зондирующего сигнала которого параллельно подключен к сигнальным входам СВЧ переключателя - 19 и СВЧ коммутатора - 20. Выход счетчика (M×N+1) импульсов - 21 параллельно подключен ко входу заполнения счетчика текущего номера подрешетки - 22, второму входу запуска ПЧ измерителя амплитуды и фазы сигнала - 24 и управляющему входу аналогового коммутатора - 17. Выход промчастотного измерителя амплитуды и фазы сигнала - 27 параллельно соединены со входом заполнения счетчика (M×N+1) импульсов - 21 и входом регистратора амплитудно-фазовых распределений - 15. В свою очередь, выход счетчика текущего номера подрешетки - 22 параллельно подключен к информационному входу регистратора амплитудно-фазовых распределений - 15 и управляющим входам СВЧ переключателя - 19 и СВЧ коммутатора - 20, выходы которых соответственно связаны с помощью волноводных трактов со входом линии передачи сигналов - 10, закрепленной этим концом на неподвижной опоре, и полирупорным облучателем - 23.
Выход системы управления лучом - 3 подключен ко входу регистратора амплитудно-фазовых распределений - 15.
Устройство работает следующим образом.
Как следует из проведенного анализа, заявляемое устройство базируется на следующих основных принципах: измерение параметров поля эталона и испытуемой ФАР производится строго синхронно в идентичных точках матрицы, одним и тем же измерителем, при этом в промежутке между двумя независимыми отсчетами для двух смежных точек матрицы осуществляется контроль соответствия реального АФР в раскрыве АФАР штатному с тем, чтобы каждый отсчет параметров поля был соотнесен с достоверно контролируемым состоянием АФАР.
Для практической реализации подобной концепции выполняются следующие технологические операции: предварительно построенная АФАР - 1 со всем комплексом вспомогательного оборудования монтируется на рабочем месте. Относительно привалочных плоскостей АФАР - 1 юстируется планерный сканер - 6 с заданной точностью.
С тыльной стороны сканера монтируется эталонный рупор - 10 таким образом, чтобы обеспечить взаимную компланарность плоскости раскрыва с АФАР - 1. При этом выдерживаются следующие основные условия - электрическая и оптическая оси эталонного рупора - 15 и АФАР - 1 должны лежать на одной прямой, а удаление полотна АФАР - 1 от области сканирования первого измерительного зонда - 9 должно в точности соответствовать удалению d раскрыва эталонного рупора - 16 от области сканирования второго измерительного зонда - 11. При этом, естественно, подразумевается, что величина d соответствует критерию ближней зоны, т.е. составляет величину d=(2÷10)λ, где λ - длина волны, на которую рассчитана РЛС с АФАР - 1.
Подготовительный этап работы также включает: многократный контроль параметров поля эталонного рупора - 16 с помощью планарного сканера - 6 в расчетных точках матрицы и сравнение его с расчетными либо паспортными данными эталона КУ, полученными с помощью образцовых средств поверки. Результатом таких измерений являются выводы о достоверности и точности функционирования амплифазометрического комплекса, а также таблица систематических ошибок, поправок, используемых в процессе синтеза реальной матмодели распределения интегральных погрешностей отсчетов параметров поля по раскрыву. В случае стационарного характера погрешностей практически полученные таблицы поправок могут быть эффективно использованы для корректировки результатов измерений матрицы отсчетов параметров поля АФАР - 1 и повышения точности вычисления интегральных параметров. Следует также отметить, что на подготовительном этапе работы комплекса оптимизируется также подвеска линии передачи сигнала - 10, представляющая собой свободно висящую петлю коаксиального кабеля, раскрепленного в плоскости, параллельной области сканирования, между вертикальной кареткой - 8 и опорой - 24, высота которой выбрана таким образом, чтобы исключить касание кабеля о поверхность поля и в то же время минимизировать кратность радиусов изгибов при минимальном и максимальном удалении горизонтальной каретки от опоры в области сканирования, гарантирующих минимум дополнительных фазовых набегов.
Практически высота опоры может быть выбрана из следующего соотношения: Hо=h(0,1÷0,15)D,
где h - область сканирования по вертикали, D - область сканирования по горизонтали.
После завершения подготовительных процедур переходят собственно к рабочему режиму, с этой целью, с помощью СУЛ - 3 задают угловые координаты электрической оси АФАР - 1 в пространстве, устанавливают штатное амплитудно-фазовое распределение и внешней командой запускают генератор кодов разметки матрицы - 14, который, в принципе, может быть выполнен в виде счетчика, работающего по основанию шага измерений.
Первый код координаты с выхода генератора, поступив на вход координатного привода - 7, приведет к выходу в заданную точку кареток горизонтального и вертикального перемещения планарного сканера - 6.
Заданные генератором - 14 текущие координаты первого и второго измерительных зондов - 9, 11, измеряемые датчиком текущих координат зонда - 12, поступив на первый и второй входы схемы поразрядного сравнения - 13, динамически сравниваются и в момент совпадения на ее выходе появится импульс, признак равнозначности, в соответствии с которым будет сформирован сигнал "Запуск измерения", поступающий на первый вход промчастотного измерителя амплитуды и фазы сигнала - 24.
Измерительный сигнал, на котором осуществляется измерение параметров поля, формируется следующим образом: зондирующий сигнал с предварительных каскадов возбудителя РЯС с выхода генераторно-гетеродинного оборудования - 5 поступает через СВЧ переключатель - 19 и линию передачи сигнала - 10 непосредственно к первому и второму измерительным зондам - 9, 11 которые синхронно облучают раскрывы АФАР - 1 и эталона КУ - 16.
Назначение СВЧ переключателя - 19 - разрыв тракта передачи ЗС на вход линии - 10 в моменты завершения отсчетов параметров поля в данной точке матрицы АФАР - 1 и эталона КУ - 16. Взаимная ортогональность плоскостей поляризации первого и второго измерительного зондов 9, 11 использована для исключения взаимного влияния измерительных сигналов, возникающих из-за вторичных переотражений, например сигнала, отраженного от диаграммо-образующего экрана ФАР - 1 и безэховой камеры. Развязка по поляризации такое влияние исключает, не сказываясь на точности обмера параметров эталона КУ - 16, поскольку он ориентирован таким образом, что плоскости поляризации 2-го измерительного зонда - 11 и эталона совпадают между собой.
Алгоритм работы заявляемого устройства выбран таким образом, что в данной точке матрицы первым всегда осуществляется измерение параметров поля эталона КУ - 16, поскольку это позволяет использовать дополнительные средства контроля достоверности измерений, предшествующие основному отсчету параметров поля АФАР - 1 путем сравнения с эталонным значением. Сигнал с выхода эталона поступает на одноименный вход приемно-преобразующего модуля подрешетки ФАР - 18.
Использование такого модуля в составе устройства предложено для того, чтобы гарантировать идентичность условий преобразования сигнала с СВЧ на ПЧ с теми, в которых осуществляется эта процедура N×M подрешетками - 2 АФАР - 1. Т.о., приемно-преобразующий модуль подрешетки - 18 является, по сути, эталонным блоком усиления и переноса сигнала с СВЧ на ПЧ, функционирующим в точности в тех же условиях, что и все остальные N×M модулей подрешеток АФАР - 1, т.е. фиксированном и идентичном спектральном составе, уровнях мощности сигналов первого и второго гетеродинов, а также зондирующих сигналов. Именно такое сочетание эталона параметров поля и эталона активного тракта усиления-преобразования, выполненного на базе одного из модулей подрешетки ФАР, гарантирует возможность нормировки интегральных параметров АФАР - 1 и эталона - 16 в процессе вычисления КУ. Как это вытекает из схемы, преобразование сигнала с выхода эталонного рупора - 16 осуществляется с помощью модуля, на преобразующие входы которого поступают сигналы первого, второго гетеродина и зонда с выхода генераторно-гетеродинного оборудования - 5, параллельно подключенного к аналогичным входам подрешеток АФАР - 1. Преобразованный сигнал с выхода модуля - 18 на ПЧ, пропорциональный параметрам поля эталона - 16 в первой точке отсчета, поступает на второй вход аналогового коммутатора - 17, который в исходном состоянии транслирует сигнал со второго выхода непосредственного на сигнальный вход промчастотного измерителя амплитуды и фазы сигнала - 24, опорный вход которого подключен к выходу ПЧ зондирующего сигнала генераторно-гетеродинного оборудования - 5 (ГГО). В соответствии с импульсом запуска (ИЗ), поступившим с выхода схемы поразрядного сравнения - 15 по первому входу ПЧ измерителя - 24, будет осуществлено преобразование параметров входного ПЧ сигнала в цифровой эквивалент, который поступит на первые информационные входы регистратора амплитудно-фазовых распределений - 15, на которые параллельно поступает код угловых координат положений луча АФАР - 1, для которого производится обмер параметров поля, и текущие координаты измерительного зонда, к которым относится выполненное измерение. После завершения измерения параметров поля эталона - 16, на выходе измерителя - 24 наряду с информацией появится признак (импульс) конца кодирования, который по входу заполнения запустит счетчик (N×M+1) импульсов, формирующий второй и последующие импульсы запуска измерителя - 24, поступающий параллельно на второй запускающий вход и управляющий вход коммутатора - 17, переключающего сигнал с ПЧ выхода АФАР непосредственно на сигнальный вход измерителя. Точно так же, как и для эталона, измеритель - 14 осуществит точное вычисление кодов амплитуды и фазы сигнала отсчетов параметров поля АФАР - 1 в БЗ в той же самой точке, что параметры эталона. Учитывая электронные скорости измерений и кодирования АФР, смещением геометрических координат зондов за время измерений можно пренебречь. Следует отметить, что измерение АФР в БЗ может осуществляться, как на непрерывном, так и на импульсном ЗС, практически не меняя алгоритм работы, только в этом случае осуществляется взаимная синхронизация процессов излучения и измерения. Вторая пара кодов значений амплитуды и фазы поля в данной точке матрицы с выхода измерителя - 24, поступив на вход регистратора - 15, будет накоплена в соответствующей ячейке памяти буферного накопителя. Достоинством предложенного решения является строгая идентичность и эквивалентность параметров измерительного тракта, обеспечивающего регистрацию параметров поля АФАР - 1, и эталона - 16. Немедленно после завершения такой регистрации устройство переключается в режим контроля спецраспределений АФАР - 1 по N×M подрешеткам - 2. С этой целью очередным счетным импульсом с выхода счетчика - 21, поступившим по входу заполнения счетчика текущего номера подрешетки - 22, переключит его в первое счетное состояние по основанию кода, эквивалентного адресу первой из N×M подрешеток. С выхода счетчика - 22 код текущего номера подрешетки - 22 поступит параллельно на вход коммутатора подрешеток - 4, обеспечивающего коммутацию выхода первой из подрешеток на общую шину, при всех остальных запертых. Т.е. на выходе ФАР - 1 в случае ее облучения ЗС будет присутствовать сигнал, пропорциональный комплексным коэффициентам (КП), который, поступив на управляющие входы СВЧ переключателя - 19 и СВЧ коммутатора - 20, обеспечит разрыв цепи передачи ЗС на вход линии передачи сигнала - 10 и разблокирование коммутатора - 20, который в соответствии с кодом номера подрешетки передает ЗС на вход того секториального рупора облучателя - 23, в зоне которого (квадранте) находится выбранная подрешетка. Сигнал, излученный секториальным рупором, зафиксированный измерителем - 24, поступит на вход регистратора - 15. Очередным импульсом конца кодирования счетчик - 21 переключит счетчик - 22 в очередное состояние, обеспечив коммутацию выхода и облучение соответствующей подрешетки, с последующим измерением и регистрацию ККП. Общее число измерений ПЧ сигналов с выхода ФАР-1 составит (N×M+1) раз, после чего счетчик 21 переключится в исходное нулевое состояние, обеспечив эквивалентное число раз разрешение прохождения сигналов через аналоговый коммутатор - 17. По завершении перебора всех подрешеток коммутатор - 17 перейдет в состояние, обеспечивающее подключение выхода модуля ПР-18 к сигнальному входу измерителя - 14, в ожидание формирования схемой поразрядного сравнения - 13 импульса, сигнализирующего о перемещении измерительного зонда в очередную точку. Смысл всех процедур контроля ККП N×M подрешеток - 2 в промежутке между двумя соседними точками матрицы - строго соотнести реальное динамически установившееся АФР в раскрыве ФАР с параметрами измеренного поля в БЗ излучения. В очередной точке матрицы весь цикл измерений параметров поля АФР и эталона будет повторен, в результате чего в буфере регистратора будут зафиксированы коды ККП всех N×М подрешеток и коды отсчетов параметров поля ФАР и эталона КУ - 16.
Циклы регистрации параметров АФР и ККП подрешеток будут продолжаться до тех пор, пока не будет завершен обход всей совокупности точек матрицы отсчетов планарным сканером, исходя из геометрических размеров и частотного диапазона ФАР-1.
В результате чего перед началом вычисления интегральных параметров направленности ФАР будет накоплен массив ККП для каждой точки матрицы, анализируя который путем сравнения их со штатными значениями, можно сделать гарантированно достоверное заключение о соответствии спецраспределений ФАР штатном, т.е. что обмеру подвергается динамически стабильная ФАР - 1 во всем периоде измерений и в каждой точке отсчета.
Дальнейшее функционирование устройства по своему алгоритму не отличается от других известных амплифазометрических комплексов, в т.ч. и тех, в которых осуществляется измерение КУ. Т.е., пользуясь рекомендациями, изложенными в ГОСТ 8.309-78 и монографии под ред. Л.Д. Бахраха "Методы измерений параметров излучающих систем в ближней зоне излучения". § 3.2, стр. 69÷75, Ленинград, Наука, 1985 г., осуществляют реализацию вычислительных алгоритмов по синтезу параметров объемных ДН ФАР и эталона, а пользуясь методом взаимонормировки, определяют реальное значение КУ ФАР.
В качестве примера расчетной формулы для вычисления КУ в БЗ по результатам измерений может быть использовано следующее выражение для определения КНД - К(θ) и последующего пересчета в КУ:

где Δx, Δy - шаги съема матрицы АФР в БЗ;
θ - угол отклонения луча ФАР от нормали;

λ - длина волны.
Следует отметить, что также может быть измерено КУ ФАР в режиме "Передача", только в этом случае на вход модуля - 18 подключают выход ФАР по СВЧ сигналу, хотя и работает она при этом в режиме "Прием", однако, в силу обратимости параметров вибраторов результаты получаются эквивалентными.
Сами вычислительные процедуры диагностики состояния АФАР и амплифазометрического комплекса по накопленным массивам отсчетов параметров поля эталона КУ в данной заявке детально не приводятся, т.к. являются очевидными по своей сути:
- сравнение текущих значений ККП подрешеток АФАР со штатными значениями каждой точки матрицы с формированием результирующих оценок о нахождении в допуске технического состояния контролируемой АФАР;
- сравнение отсчетов параметров АФР эталона КУ в расчетных точках матрицы с их паспортными значениями, полученными в процессе метрологической аттестации, с последующим вычислением коэффициентов поправок, связанных с флуктуациями метрологических характеристик амплифазометрического комплекса, а также анализ нахождения их в допуске.
Практически заявляемое устройство было реализовано в процессе синтеза комплекса ИКАР-4, предназначенного для отработки изделия К-20. При этом была подтверждена высокая эффективность подобной технологии измерений КУ, осуществляемых при любых угловых положениях луча и рабочих частотах.
Основные технико-экономические преимущества заявляемого устройства: существенное повышение достоверности, точности и оперативности измерений КУ, осуществляемых практически в каждом цикле измерений, при весьма экономичном использовании рабочих площадей и 100% использовании времени намерений. По сравнению с известными методами, время измерений КУ уменьшается в 2 раза с учетом вспомогательных операций, стоимость сканера сокращается на 30% из-за возможности уменьшения области сканирования, результативностью достоверность измерений приближается при этом к 100%, а точность измерений КУ при учете систематики моделей ошибок повышается на 20÷25%.
Применение устройства наиболее эффективно в процессе синтеза заводских АИК, используемых для настройки серийных АФАР.
Техническая реализация заявляемого устройства может быть осуществлена следующим образом:
счетчики импульсов, кодов номера подрешеток и генераторы кодов разметки матрицы - серийные ИМС типа 133 ИЕ6, ИЕ2, ИЕ7 и др., схема поразрядного сравнения - ИМС типа 133 КП5, КП7.
Аналоговый коммутатор - аналоговые ИМС типа 590 КН1; 543 КН2 и др.
СВЧ переключатели, СВЧ коммутаторы - электроуправляемые p-i-n-диоды, сочлененные с элементами волноводных трактов, антенные переключатели и др.
Промчастотные измерители амплитуды и фазы сигнала - серийные ПЧ фазометры, например, типа ФК 2-29, Ф5126 и др.
Система управления лучом, коммутатор подрешеток, генераторно-гетеродинное оборудование - штатное оборудование РЛС с ФАР.
Регистратор АФР - серийная персональная ЭВМ типа ЕС 1841, CM 1810 и др. соответствующих объемов памяти и быстродействием.
Планарный сканер совместно с сопряженными приборами - аппаратура измерительного комплекса, проектируемая для АФАР данного типа.
Эталонный рупор (антенна) - эталон КУ, изготавливаемый и аттестуемый в установленном порядке.
Приемно-преобразующий модуль подрешетки ФАР - как и следует из названия, штатный модуль РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ СХЕМЫ РАЗВЕДЕНИЯ ПЕЛЕНГАЦИОННЫХ ЛУЧЕЙ | 1989 |
|
SU1841118A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУДНО-ФАЗОВОГО РАСПРЕДЕЛЕНИЯ ПОЛЯ АНТЕННЫ | 1991 |
|
SU1841106A1 |
| Многоканальное устройство для измерения амплитудно-фазового распределения поля фазированной антенной решетки | 1986 |
|
SU1474563A1 |
| ПЛАНАРНЫЙ СКАНЕР | 1989 |
|
SU1841123A1 |
| ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА С УПРАВЛЯЕМОЙ ШИРИНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2012 |
|
RU2507647C1 |
| Способ определения комплексных амплитуд возбуждения каналов фазированной антенной решетки по измерениям в ближней зоне | 2018 |
|
RU2682585C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ВЫСОКОГО РАЗРЕШЕНИЯ С АКТИВНОЙ ФАЗИРОВАННОЙ РЕШЕТКОЙ ДЛЯ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2429990C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| Способ настройки фазированной антенной решетки | 1990 |
|
SU1774290A1 |
| УСТРОЙСТВО КОНТРОЛЯ СВЧ СОЕДИНИТЕЛЕЙ СЕКЦИОНИРОВАННОЙ ФАР | 1985 |
|
SU1841057A1 |
Изобретение относится к области радиоизмерений и может быть использовано для автоматизированного счета параметров крупноапертурных фазированных активных решеток (ФАР) амплифазометрическим методом в условиях завода-изготовителя. Сущность: устройство содержит активную ФАР (1), образованную N×M подрешетками (2), обеспечивающими преобразование СВЧ сигнала на промежуточную частоту. По четырем углам грани ФАР (1) расположен полирупорный облучатель (23). Параллельно к раскрыву ФАР (1) в ближней зоне излучения размещен планарный сканер (6), механически сочлененный с координатным приводом (7), обеспечивающим перемещение вертикальной каретки (8) сканера (6) с размещенными на ней первым и вторым измерительными зондами (9, 11). Второй измерительный зонд (11) развернут своим раскрывом по отношению к первому зонду (9) на 180°, при этом плоскости поляризации измерительных зондов (9, 11) взаимно ортогональны. Первый и второй измерительные зонды (9, 11) подключены к линии передачи сигнала (10). Кроме того, устройство содержит систему (3) управления лучом, коммутатор (4) подрешеток, генераторно-гетеродинное оборудование (5), датчик (12) текущих координат зонда, схему (13) поразрядного сравнения, генератор (14) кодов разметки матрицы, регистратор (15) амплитудно-фазовых распределений, эталонный рупор (16), аналоговый коммутатор (17), приемно-преобразующий модуль (18) подрешетки ФАР, СВЧ переключатель (19), СВЧ коммутатор (20), счетчик (21) (N×M+1) импульсов, счетчик (22) текущего номера подрешетки, промчастотный измеритель (24) амплитуды и фазы сигнала. Эталонный рупор (16), плоскость поляризации которого параллельна плоскости поляризации второго измерительного зонда (11), размещен зеркально симметрично на равном расстоянии от раскрыва ФАР (1). При этом электрические и оптические оси ФАР (1) и эталонного рупора (16) совмещены в пространстве и лежат на одной прямой. Технический результат: повышение точности и оперативности измерений. 1 ил.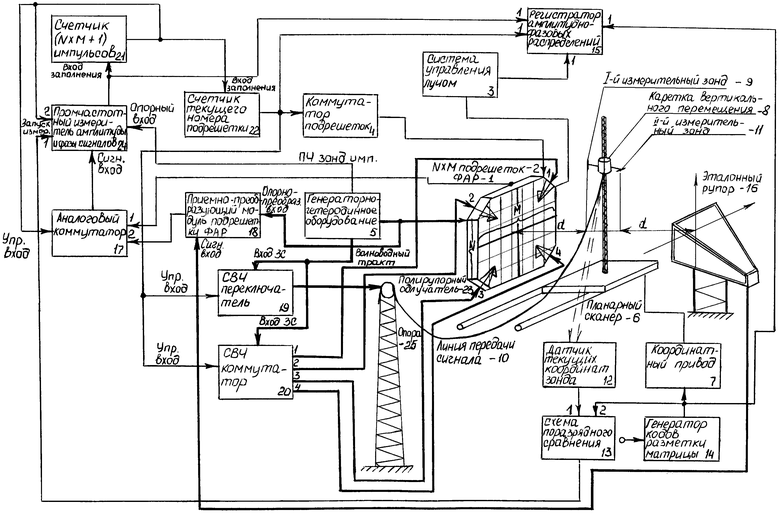
Устройство измерения коэффициента усиления активной ФАР, образованной N×M подрешетками, обеспечивающими преобразование СВЧ сигнала на промежуточную частоту, соединенной своими входами с генераторно-гетеродинным оборудованием, коммутатором подрешеток, системой управления лучом, связанной по выходу с регистратором АФР, содержащее планарный сканер в ближней зоне излучения ФАР, обеспечивающий с помощью механически сочлененного с ним координатного привода сканирование первого измерительного зонда, а также эталонный рупор, отличающееся тем, что, с целью повышения точности, оперативности и достоверности измерений, введены второй измерительный зонд, размещенный соосно с первым, схема поразрядного сравнения, приемно-преобразующий модуль подрешетки ФАР, СВЧ переключатель и СВЧ коммутатор, счетчик текущего номера подрешетки, аналоговый коммутатор, промчастотный измеритель амплитуды и фазы сигнала, генератор кодов разметки матрицы, полирупорный облучатель, размещенный по четырем углам, активной ФАР и счетчик (N×M+1) импульсов, при этом второй измерительный зонд подключен параллельно к выходу линии передачи сигнала и развернут относительно раскрыва первого на 180°, а плоскости поляризации первого и второго измерительных зондов взаимно ортогональны, раскрыв эталонного рупора, плоскость поляризации которого совпадает с плоскостью поляризации второго измерительного зонда, размещен зеркально симметрично на равном расстоянии от раскрыва ФАР, а их электрические и оптические оси совмещены в пространстве и лежат на одной прямой, выход эталонного рупора связан с сигнальным входом приемно-преобразующего модуля подрешетки ФАР, второй преобразующий вход которого соединен с соответствующими выходами генераторно-гетеродинного оборудования, параллельно подключенными ко входам зондирующих сигналов СВЧ переключателя и коммутатора, первый и второй входы аналогового коммутатора подключены к промчастотному выходу ФАР и выходу приемно-преобразующего модуля подрешеток, управляющий вход аналогового коммутатора связан с выходом счетчика (N×M+1) импульсов, параллельно подключенного ко второму входу запуска промчастотного измерителя амплитуды и фазы сигнала и входу заполнения счетчика текущего номера подрешетки, выход которого соединен со входами регистратора АФР, коммутатора подрешеток и управляющими входами СВЧ переключателя и коммутатора, по входам сопряженных, соответственно, с помощью волноводного тракта с полирупорным облучателем и со входом линии передачи сигнала, закрепленной на неподвижной опоре, первый и второй входы схемы поразрядного сравнения соответственно связаны с выходами датчика текущих координат зонда и генератора кодов разметки матрицы, параллельно подключенного ко входам координатного привода и регистратора АФР, выход схемы поразрядного сравнения подключен к первому входу запуска промчастотного измерителя амплитуды и фазы сигналов, сигнальный и опорный входы которого соответственно подключены к выходам аналогового коммутатора и генераторно-гетеродинного оборудования, а его выход параллельно подключен ко входу заполнения счетчика (N×M+1) импульсов и информационному входу регистратора АФР.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Страхов А.Ф | |||
| Автоматизированные антенны измерения | |||
| М., Радио и связь, 1986 г., стр | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |

