Изобретение относится к космической технике и может использоваться в системах терморегулирования космических аппаратов (КА).
Известны способы терморегулирования КА в местах установки бортовой аппаратуры (БА) на радиационных поверхностях, см. [1], стр.199-202, за счет поддержания на указанных поверхностях заданных радиационных характеристик. Указанные способы и системы, их реализующие, относятся к пассивным методам терморегулирования.
Основными пассивными элементами систем терморегулирования (СТР) являются терморегулирующие покрытия и экранно-вакуумная теплоизоляция (ЭВТИ), см. [1], стр.200-201.
Пассивное терморегулирование с использованием поверхностей с определенными радиационными характеристиками и высокоэффективной ЭВТИ позволяет снизить внешние теплопритоки внутрь БА (или тепловые потери в космос). Оно также позволяет уменьшить тепловую нагрузку на активную часть БА, включающую в себя чувствительные элементы (ЧЭ), электронные блоки (ЭБ), индивидуальные средства прецизионного терморегулирования (ИСПТ) и другие элементы приборных устройств, входящих в состав БА.
Главными критериями при выборе наружных терморегулирующих покрытий для их использования на КА являются коэффициенты поглощения солнечного излучения AS и степень черноты ε. Наиболее эффективной термоизоляцией в космических условиях является многослойная ЭВТИ, см. [1], набранная из радиационных экранов и теплоизоляционных прокладок.
Терморегулирование достигается за счет обеспечения стабильности характеристик терморегулирующих покрытий и радиационных экранов, выполненных с ЭВТИ. При этом последние могут выполняться в виде защитных шторок, см. [2], конструкция которых позволяет эффективно перераспределять внутренние и внешние тепловые потоки, обеспечивая заданную изотермичность по всему объему приборного отсека, включая расположенную в нем БА.
Терморегулирование КА БА осуществляется путем подвода тепловой энергии в зону установки БА и во внутрь БА в случае достижения измеренными значениями температур нижнего предельного уровня допустимого диапазона. И отвода тепловой энергии из зон установки БА и от БА в случае достижения измеренными значениями температур верхнего предельного уровня допустимого диапазона. Таким образом, обеспечивается режим внешнего радиационного теплообмена БА с космической средой.
Недостаток пассивных способов терморегулирования заключается в том, что их использование в известной мере определяется результатами, достигнутыми в разработке стойких к внешним факторам космического пространства (ФКП) терморегулирующих покрытий.
Изменения и погрешности тепловых радиационных характеристик при эксплуатации увеличивают разброс величин расчетной температуры для БА. Это приводит к созданию более сложных устройств внутреннего терморегулирования, тем самым увеличивается масса БА, понижается надежность ее работы и т.д. Указанные ограничения позволяют также осуществлять терморегулирование только в узком температурном диапазоне.
Активные способы и системы терморегулирования способны поддерживать необходимый тепловой режим при изменении внешних и внутренних тепловых нагрузок в широком диапазоне. Причем точность поддержания температуры значительно выше, чем у пассивных систем.
Регулирование величины сбрасываемого тепла осуществляется с помощью специальных устройств - байпасных линий с клапанами, вспомогательных теплообменников, радиаторов с регулируемым расходом теплоносителя, тепловых труб переменной теплопроводности и других устройств.
В качестве прототипа к предлагаемому изобретению рассмотрим способ терморегулирования в зонах установки БА КА с помощью тепловых труб (ТТ), см. [2].
Обычная ТТ переменной теплопроводности способна поддерживать собственную температуру на постоянном уровне, несмотря на то, что подводимая тепловая мощность и окружающие условия изменяются. Если тепловое сопротивление между ТТ и тепловым источником мало, то температура источника будет также примерно постоянной. На практике это сопротивление нередко оказывается достаточно большим, вследствие чего температура источника будет изменяться в более широком диапазоне, чем температура ТТ.
Эти колебания температуры источника могут быть значительно уменьшены при использовании ТТ переменной теплопроводности при регулировании по обратной связи.
Системы терморегулирования с электрической обратной связью включают в себя термистор, электронный блок и электронагреватель (ЭН), установленный на газовой емкости ТТ. Таким образом, в ТТ с обратной связью управляющим параметром является температура источника тепла, которым в [2] является БА.
В качестве прототипа принимается способ активного терморегулирования БА, установленной на КА, содержащий терморегулирование как в зонах установки, так и внутри аппаратуры.
Способ-прототип включает в себя измерение температуры в зонах установки БА, к которым подведены ТТ. Управление тепловыми потоками в указанных зонах за счет включения ЭН и тем самым подвода тепла в зоны установки БА в случае достижения измеренными значениями температур нижнего предельного уровня. При достижении верхнего предельного температурного уровня производится отключение ЭН или их перенастройка на работу на более низком температурном уровне. Таким образом, осуществляется внешнее терморегулирование БА в зоне ее установки.
Указанный температурный диапазон между верхним и нижним уровнями терморегулирования является расчетным для системы внутреннего терморегулирования. По нему настраивается работа указанной системы. При этом производится измерение внутренних температур БА в зонах терморегулирования БА, по которому непосредственно осуществляется терморегулирование в допустимых диапазонах - при достижении измеренными значениями температур нижнего предельного уровня производится подвод тепловой энергии внутрь БА и отвод тепла от БА в случае достижения измеренными значениями температур верхнего предельного уровня.
Недостаток способа-прототипа заключается в том, что терморегулирование осуществляется без учета выходных характеристик БА.
В процессе эксплуатации БА в условиях космического полета происходят постепенные температурные изменения в работе ЭБ, ЧЭ, ИСПТ и других частях БА, связанные с выработкой ресурса и воздействием внешних ФКП (солнечной ультрафиолетовой радиации, ионного излучения и др.). Указанные воздействия приводят, в свою очередь, к изменениям выходных характеристик БА. В целом измерения, которые производят ЧЭ БА, не должны по техническим условиям на эксплуатацию выходить за номинальные значения. Однако измеренные физические величины могут не иметь оптимальных (по точным показателям) значений как для непосредственно БА, производящей эти измерения, так и для работающей с ней аппаратуры. Например, для гироскопического измерителя вектора угловой скорости (ГИВУС) увеличивается ошибка измерений, которая приводит к необходимости более частого включения всех измерительных каналов прибора для коррекции бесплатформенной инерциально-навигационной системы (БИНС) КА и дополнительного включения датчиков внешней информации (солнечного, звездного и др.) для работы в паре с ГИВУС. В конечном результате это приводит к более быстрому расходу ресурса указанных приборов, что, в свою очередь, сокращает срок эксплуатации спутника в целом.
Задачей, решаемой в предлагаемом изобретении, является продление срока эксплуатации КА за счет уменьшения расхода ресурса БА по числу включений и продолжительности ее работы при выполнении программы полета.
Для достижения технического результата в способе терморегулирования бортовой аппаратуры космического аппарата, включающем измерение температуры в зоне установки БА, измерение внутренних температур БА, подвод тепловой энергии в зону установки БА и во внутрь БА в случае достижения измеренными значениями температур нижнего предельного уровня допустимого диапазона и отвод тепловой энергии из зон установки БА и от БА в случае достижения измеренными значениями температур верхнего предельного уровня допустимого диапазона, в отличие от известного в начале полета КА производят тестовые измерения выходных характеристик БА un(t), где n=1, 2, 3 ..., - число тестовых измерений, на протяжении всего допустимого диапазона температур в зонах установки БА [TZ1, TZ2], фиксируют полученные наиболее точные измеренные значения  при одновременной фиксации диапазонов температур в зонах установки БА
при одновременной фиксации диапазонов температур в зонах установки БА  и внутри БА
и внутри БА  , далее в процессе полета КА, измеряют текущие выходные характеристики БА u(t), сравнивают их с для выполнения условия
, далее в процессе полета КА, измеряют текущие выходные характеристики БА u(t), сравнивают их с для выполнения условия
 ,
,
где Δu - допустимое значение расхождений между измеренными и точными значениями выходной характеристики БА,
и, если условие (1) выполняется, производят терморегулирование БА в зонах установки в пределах температурного диапазона  , в противном случае проверяют выполнение условия
, в противном случае проверяют выполнение условия

где TB(tX) - текущее измеренное значение внутренней температуры в момент времени tX выхода за допустимое значение расхождений между измеренными и точными значениями выходной характеристики БА Δu и, если условие (2) не выполняется, производят изменение условий терморегулирования в зоне установки БА до выполнения условия (2), при этом фиксируют вновь определенный диапазон температур  в зоне установки БА, для которого выполняется условие (2), далее производят проверку соответствия условию (1) и в случае его выполнения производят терморегулирование БА в зонах установки в пределах вновь определенного температурного диапазона
в зоне установки БА, для которого выполняется условие (2), далее производят проверку соответствия условию (1) и в случае его выполнения производят терморегулирование БА в зонах установки в пределах вновь определенного температурного диапазона  , а в случае если условие (1) не выполняется при выполнении условия (2), производят повторные тестовые измерения выходных характеристик БА
, а в случае если условие (1) не выполняется при выполнении условия (2), производят повторные тестовые измерения выходных характеристик БА  на протяжении всего допустимого диапазона температур [TZ1, TZ2], повторно фиксируют полученные наиболее точные значения измерений
на протяжении всего допустимого диапазона температур [TZ1, TZ2], повторно фиксируют полученные наиболее точные значения измерений  при одновременной фиксации диапазонов температур в зонах установки БА
при одновременной фиксации диапазонов температур в зонах установки БА  и внутри БА
и внутри БА  далее в процессе полета КА продолжают измерение текущих выходных характеристик БА u(t) и проверяют выполнение условия
далее в процессе полета КА продолжают измерение текущих выходных характеристик БА u(t) и проверяют выполнение условия

при его выполнении продолжают терморегулирование БА в зоне ее установки в диапазоне температур , в противном случае повторяют вышеуказанным образом цикл определения нового диапазона температур для терморегулирования БА в зоне ее установки с учетом выполнения условия

далее терморегулирование осуществляют во вновь определенном диапазоне температур, а в случае невыполнения условия (3) и выполнения при этом условия (4), производят новые тестовые измерения выходных характеристик БА вышеуказанным образом, по результатам которых определяют диапазоны температур для последующего терморегулирования в местах установки БА, и производят терморегулирование до завершения полета КА.
В техническом предложении, заложенном в способе терморегулирования, определяется оптимальная по точности выходная характеристика БА, зависящая от управляемых тепловых потоков в зонах ее установки.
Полученный технический результат позволяет выполнять программу полета КА с меньшим расходом ресурса БА по числу включений и по продолжительности ее работы. Это приводит к продлению сроков эксплуатации КА.
Для объяснения сути предлагаемого технического решения введены фиг.1 - фиг.3.
На фиг.1 представлена структурная схема тепловой системы прибора.
На фиг.2, 3 представлены в виде графиков зависимости выходных характеристик ГИВУС от различных условий терморегулирования в зоне установки прибора.
Определенный состав БА, установленный на КА, содержит внутренние системы терморегулирования. Как правило, например, такими устройствами обладают большинство измерителей вектора угловой скорости, которые демпферными термоустройствами осуществляют прецизионное терморегулирование в зонах установки ЧЭ (см. [3], стр.41).
На фиг.1 введены обозначения:
1 - основание прибора;
2 - чувствительный элемент (например, поплавковый гироскоп);
3 - опора чувствительного элемента;
4 - система прецизионного терморегулирования чувствительного элемента;
5 - опора системы прецизионного терморегулирования;
6 - блоки электроники системы прецизионного терморегулирования;
7 - кожух прибора;
8 - установочные прокладки для кожуха прибора;
9 - корпус прибора;
10 - опора основания;
11 - система терморегулирования основания;
12 - блоки электроники системы терморегулирования основания;
13 - ЭВТИ;
14 - теплопроводящая паста;
15, 16 - верхняя и нижняя обкладки радиационной панели;
17 - наполнитель радиационной панели;
18 - ТТ;
19 - термодатчик системы прецизионного терморегулирования чувствительного элемента;
20 - термодатчик системы терморегулирования основания;
21 - термодатчик терморегулирования в зоне установки прибора.
Описание тепловой системы прибора (см. фиг.1).
Терморегулируемые элементы устанавливаются на основании 1, в том числе: чувствительный элемент 2 через опору 3 с надлежащей тепловой проводимостью; система прецизионного терморегулирования 4 с хорошим тепловым контактом через опорные поверхности 5; блоки электроники системы прецизионного терморегулирования 6.
Тепло, выделяемое в терморегулируемых элементах, отводится на основание 1, теплоизолированное от влияния окружающих конструкций алюминиевым кожухом 7. Кожух 7 закреплен на основании 1 через текстолитовые прокладки 8. Основание 1 крепится на корпусе прибора 9 через теплоизолирующие опоры 10.
Отвод тепла с основания 1 осуществляется через систему терморегулирования 11 на корпус прибора 9.
На корпус прибора 9 с хорошим тепловым контактом установлены блоки электроники 12, не требующие точного термостатирования. Кожух прибора 7 вместе с корпусом 9 снаружи закрыт ЭВТИ 13, защищающей прибор от внешних потоков тепла.
Тепло из корпуса прибора 9 через теплообменные поверхности прибора и через зазор, заполненный теплопроводящей пастой 14, передаются на обкладку 15 радиационной панели. Панель состоит из верхней 15 и нижней 16 обкладок с пространством между ними, заполненным наполнителем 17. Внутри, между обкладками панели, проложены тепловые трубы 18.
Система прецизионного терморегулирования 4 является системой подогревного типа, осуществляющей вывод на рабочую температуру Трч корпуса чувствительного элемента и поддержание температуры в заданном диапазоне [TЧ1, TЧ2].
Управление ведется по термодатчикам 19, исполнительными элементами системы являются нагревательные элементы (НЭ). Термодатчики 19 и НЭ соединяются в систему терморегулирования через усилитель терморегулирования (УТС), обеспечивающий автоматическое регулирование мощности, выделяемой в НЭ по сигналам термодатчиков 19. УТС расположен в блоке 6.
Система терморегулирования 11 основания 1 представляет собой реверсивную систему терморегулирования, работающую в режиме подогрева основания в диапазоне температур [T01, T02] и в режиме охлаждения основания в диапазоне температур [T02, Т03].
Управление системой терморегулирования 11 производится по термодатчикам 20, установленным на основании 1 прибора, подключенным к входным цепям регулятора, расположенного в блоке 12.
Исполнительными элементами системы являются термоэлектрические микроохладители, расположенные между основанием 1 и корпусом прибора 9 с хорошим тепловым контактом с обеих сторон.
Терморегулирование в зоне установки прибора осуществляется по термодатчикам 21, установленным на верхней обкладке 15, являющейся внутренней для КА. Управление производится от нижнего температурного предельного уровня TZ1 до верхнего предельного уровня ТZ2. При этом подвод и отвод тепла может осуществляться как по тепловым трубам 18, так и через нижнюю обкладку 16 радиационной панели, являющейся наружной на КА. В первом случае для управления тепловыми потоками используются ЭН ТТ, в другом, например, управляемые механические шторки, см. [2].
В начале полета КА предлагается произвести тестовую температурную настройку на условия эксплуатации прибора. Для этого производится его тестирование, суть которого заключается в последовательном установлении в зоне термодатчиков 21 различных диапазонов температур [TZ1, T′Z1]1, (T′Z1, T′Z2]1, (T′Z2, T′Z3]1, ..., (T'Zn, TZ2]1, где n=1, 2, 3, ... - число диапазонов для отрезка [TZ1, TZ2]. Значения температуры в указанных диапазонах обеспечивается путем подвода и отвода тепловой энергии на радиационную панель. Далее, в процессе поддержания температуры в каждом диапазоне, измеряем значение выходных характеристик  ЧЭ, где n - число тестовых измерений. При этом продолжительность поддержания температур в каждом диапазоне сначала определяется и затем задается с учетом выравнивания тепловых потоков в приборе. Для этого в процессе еще наземных его испытаний определяется «временной интервал выхода прибора на режим до установившегося теплового состояния» по результатам оценки тепловых режимов работы элементов прибора в различных условиях эксплуатации. Указанная продолжительность может определяться также математическим моделированием тепловой системы прибора.
ЧЭ, где n - число тестовых измерений. При этом продолжительность поддержания температур в каждом диапазоне сначала определяется и затем задается с учетом выравнивания тепловых потоков в приборе. Для этого в процессе еще наземных его испытаний определяется «временной интервал выхода прибора на режим до установившегося теплового состояния» по результатам оценки тепловых режимов работы элементов прибора в различных условиях эксплуатации. Указанная продолжительность может определяться также математическим моделированием тепловой системы прибора.
Выравнивание тепловых потоков внутри прибора можно также определить по измеренным значениям температур внутреннего терморегулирования. Если в системе терморегулирования измеренные значения температур прошли полный цикл изменений, значит выравнивание тепловых потоков в приборе произошло. Указанное утверждение соответствует работе схем управления мощностью НЭ в системах терморегулирования, в которых происходит периодическое подключение и отключение НЭ при достижении температурных границ, установленных для терморегулирования.
Дискретность температурных диапазонов «снизу» (по минимальным значениям диапазона) ограничивается возможностями систем управления тепловыми потоками. Например, при использовании ЭН, установленных на ТТ, ограничения будут накладывать средства, обеспечивающие автоматическое включение-выключение нагревателей, настроенных на работу по номинальным температурным значениям («управляющим вставкам»), см. [4], задаваемым, например, по командам с Земли.
Ограничения указанных интервалов «сверху» производятся, исходя из чувствительности систем внутреннего терморегулирования прибора к изменению тепловых потоков в месте его установки. Кроме того, указанная чувствительность определяется по тепловой проводимости теплообменных поверхностей прибора, которая определяется либо путем математического моделирования тепловой системы прибора, либо в процессе дополетных его испытаний.
После установившегося теплового состояния прибора наступает его «точностная готовность», под которой, в данном случае для ГИВУС, понимается готовность измерительных каналов к обеспечению измерений приращений интегралов от проекций угловой скорости КА с заданной точностью. Далее по определенным для каждого температурного интервала выходным характеристикам определяем наиболее точные значения  . Если взять для примера в качестве ЧЭ поплавковый гироскоп, измеряющий угловые перемещения, то оптимальным будет выходной сигнал, соответствующий минимальной погрешности измеренной угловой скорости, которая после интегрирования преобразуется в минимальное угловое рассогласование базисов БИНС.
. Если взять для примера в качестве ЧЭ поплавковый гироскоп, измеряющий угловые перемещения, то оптимальным будет выходной сигнал, соответствующий минимальной погрешности измеренной угловой скорости, которая после интегрирования преобразуется в минимальное угловое рассогласование базисов БИНС.
Поиск значений целесообразен по нескольким причинам. Во-первых, приборы, входящие в состав БА при выведении в составе КА на орбиту, подвергаются дополнительным динамическим и другим видам нагрузок. Во-вторых, расчетные условия эксплуатации могут отличаться от реальных условий после выведения КА на орбиту. В-третьих, температурный отрезок [TZ1, TZ2] определен, исходя из всего срока эксплуатации КА с учетом изменения условий в течение всего указанного срока (например, изменения коэффициентов AS и ε на ЭВТИ прибора, накопления дозы радиационного облучения и т.д.).
Таким образом, температурная настройка для сложившихся условий эксплуатации прибора имеет существенное значение.
Далее, для полученных значений фиксируем температурный диапазон в зоне управления тепловыми потоками  , при этом, например,
, при этом, например,  и соответствующие ему: интервал температур внутри прибора на его основании
и соответствующие ему: интервал температур внутри прибора на его основании

где [T01, Т03] - отрезок допустимых температур на основании прибора и интервал температур системы прецизионного терморегулирования ЧЭ

где [ТЧ2, ТЧ3] - отрезок допустимых температур в системе прецизионного терморегулирования ЧЭ.
Указанных внутренних контрольных температур прибора может быть несколько, при этом их число часто соответствует числу внутренних систем терморегулирования. Для обобщения рассматриваемого случая введем понятие внутренней температуры прибора и установим для нее диапазон  , где [TB1, ТB2] - отрезок допустимых внутренних температур прибора, за который можно принять
, где [TB1, ТB2] - отрезок допустимых внутренних температур прибора, за который можно принять
[TB1, ТB2]:=[T01, Т03] [ТЧ1, ТЧ2]
[ТЧ1, ТЧ2]
В процессе полета производим терморегулирование на верхней обкладке 15 радиационной панели в пределах температурного диапазона  . При этом по мере выработки ресурса прибора при его эксплуатации на борту КА происходят изменения в его тепловой системе. К ним можно отнести нижеследующее.
. При этом по мере выработки ресурса прибора при его эксплуатации на борту КА происходят изменения в его тепловой системе. К ним можно отнести нижеследующее.
Происходят изменения в тепловой проводимости пасты 14, которые могут быть связаны с естественным старением материала под действием внешних ФКП (солнечной радиации, облучения протонами и электронами высокой энергии и др.). К указанным изменениям приводит также термоциклирование пасты 14 в условиях изменяющихся температур на обкладке 15. При этом из-за различных значений коэффициентов линейного и объемного расширения пасты и контактирующих с ней элементов конструкции материал пасты по контактным поверхностям испытывает механические нагрузки, которые могут приводить к образованию микрозазоров. Это, в свою очередь, приводит к изменению тепловой проводимости пасты 14 и контактирующих с ней тепловых поверхностей. Аналогичные изменения тепловой проводимости (тепловых связей) возможны в опорах 3, 5, 10 и установочной прокладке 8, а также в местах их контакта с другими конструктивными элементами прибора.
Необходимо также отметить «старение ЭВТИ», приводящее к постепенному увеличению AS и, следовательно, к увеличению поглощения внешних тепловых потоков кожухом прибора. Особенно необходимо отметить влияние на изменение тепловых потоков в системе терморегулирования основания 11, построенного на термоэлектрических охладителях (ОТТ). Микроохладители конструктивно располагаются так, что поверхность одного спая контактирует с основанием, а поверхность другого - с корпусом прибора. Изменения величины питающего тока ОТТ позволяют регулировать направление и величину тепловых потоков между основанием 1 с установленным на нем ЧЭ2 и корпусом прибора 9.
Зависимость количества теплоты Джоуля и Пельтье, поступающей на холодный спай ОТТ (см. [5], стр.74), зависит от силы тока, регулируемого УТС, расположенного в блоке 12. Таким образом, обеспечивается реверсивность в системе терморегулирования основания 1.
Холодильный коэффициент батареи (см. [5], стр.78-81), составленной из ОТТ, может в процессе эксплуатации изменяться как за счет отказа отдельных элементов, так и изменения их свойств (электропроводности и теплопроводности). Все это также вносит нестабильность в работу тепловой системы прибора.
При длительной эксплуатации прибора допускаются также некоторые температурные влияния на работу его электронных блоков. В таких случаях в технических характеристиках параметров прибора оговариваются: максимальные значения отклонений масштабных коэффициентов, максимальные отклонения значений нулевого сигнала, не зависящего от нагрузки, и другие параметры прибора для заданных тепловых условий эксплуатации.
Для того чтобы контролировать изменяющиеся тепловые условия эксплуатации прибора, учитывая при этом их влияние на основную производящую функцию - измеряемую им физическую величину (характеристику прибора), предлагается нижеследующее.
Осуществляется постоянный контроль выходной характеристики БА u(t), для этого ее измеряем и сравниваем с . Результаты сравнения проверяем по выполнению условия
 ,
,
где Δu - допустимое значение расхождений между измеренными и точными значениями выходной характеристики БА.
Величина Δu устанавливается, исходя из технических характеристик прибора, определенных для различных режимов его работы. Для ГИВУС, например, за Δu принимается максимально допустимое отклонение нулевого сигнала (не зависящее от перегрузки) от паспортизованного значения за срок службы, Δu=(±0,120 угл.мин/час).
И, если условие (1) выполняется, производим терморегулирование в зоне установки БА в пределах температурного диапазона
 .
.
Для этого изменяем настройку работы ЭН, установленных на ТТ 18. Логика управления ЭН строится по следующему принципу: настройка номинального значения температуры ТН и допустимой зоны ее изменения ±ΔТН на включение-выключение ЭН.
В данном примере необходимо присвоить
 .
.
В случае если условие (1) не выполняется, производим проверку выполнения условия

где TB(tX) - текущее измеренное значение внутренней температуры в момент времени выхода tX за допустимое значение расхождений между измеренными и точными значениями выходной характеристики БА Δu.
Если условие (2) не выполняется, то наиболее вероятной причиной «повышенных уходов» измеряемой выходной физической величины (характеристики прибора) является изменение внутренних условий терморегулирования прибора. На этот внутренний тепловой процесс можно воздействовать внешними тепловыми потоками.
При изменении тепловых потоков внутри прибора, приводящих, например, к выходу температуры ТB(tX) за нижнее предельное значение 
 осуществляем подвод тепловой энергии из зоны установки БА в тепловую систему. Для этого последовательно с определенным интервалом ΔТ′H увеличиваем номинальное значение температуры ТH, тем самым, изменяя граничные температурные условия для систем внутреннего терморегулирования в сторону их увеличения.
осуществляем подвод тепловой энергии из зоны установки БА в тепловую систему. Для этого последовательно с определенным интервалом ΔТ′H увеличиваем номинальное значение температуры ТH, тем самым, изменяя граничные температурные условия для систем внутреннего терморегулирования в сторону их увеличения.
Указанные изменения могут приводить как к увеличению, так и к уменьшению пограничных величин температурного диапазона . Система внутреннего терморегулирования реверсивного типа в зависимости от настройки на номинальную температуру может в данном случае понижать температуру внутри прибора или ее повышать. В случае принадлежности номинальной внутренней температуры диапазону [T01, T02], соответствующему режиму подогрева основания, повышение температуры в зоне установки прибора будет приводить к изменению правой пограничной температуры  . В случае принадлежности указанной температуры диапазону охлаждения основания [T02, Т03] - левой пограничной температуре
. В случае принадлежности указанной температуры диапазону охлаждения основания [T02, Т03] - левой пограничной температуре  .
.
Понижение номинального значения ТH в зоне установки БА может также приводить к «сдвижке» левой или правой границ диапазона , в зависимости от режима работы системы терморегулирования 11 основания 1 (см. фиг.1).
Таким образом, для БА с системами внутреннего терморегулирования подвод и отвод тепловой энергии в зоны установки аппаратуры может в каждом из случаев приводить к понижению или повышению внутренней температуры.
Поэтому, проводя изменение настроек ТH для ЭН, по результатам сравнения внутренних измеренных значений температур постепенно добиваемся выполнения условия (2). Для этого используем итерационный метод последовательного изменения тепловых потоков путем настройки ЭН, зависящий от конкретных особенностей работы СТР, расположенных внутри прибора.
В данном случае постепенно понижаем температуру в зоне установки прибора, контролируя процесс по измерениям с термодатчиков 21, затем - постепенно производим там же повышение температуры.
Как правило, за счет указанных действий удается добиться выполнения условия (2). В противном случае ситуацию необходимо рассматривать как нештатную, требующую диагностического контроля и заключения от разработчиков прибора и, возможно, изменения допустимого диапазона температур [TZ1, TZ2].
После того, как условие (2) будет выполнено, фиксируем вновь определенный диапазон температур в зоне установки БА, в пределах которого указанное условие выполняется.
Далее, в пределах вновь определенного температурного диапазона  осуществляем терморегулирование в зоне установки БА, контролируя при этом выполнение условия (1). Если условие (1) выполняется, то продолжаем эксплуатацию прибора без изменений условий терморегулирования.
осуществляем терморегулирование в зоне установки БА, контролируя при этом выполнение условия (1). Если условие (1) выполняется, то продолжаем эксплуатацию прибора без изменений условий терморегулирования.
Невыполнение условия (1) при выполнении условия (2) по-новому характеризует произошедшие изменения в тепловой системе прибора. После выработки определенной части ресурса внутри прибора произошли какие-то физические изменения, связанные, а возможно и не связанные с тепловыми процессами, однако, повлиявшие на точность его выходных характеристик.
Следовательно, необходимо уточнить степень влияния произошедших изменений на выходные характеристики прибора и произвести его настройку на вновь сложившиеся условия эксплуатации.
Для этого производим повторные тестовые проверки БА на протяжении всего допустимого диапазона температур [TZ1, TZ2] с измерением выходной характеристики u(t). Далее фиксируем наиболее точные измеренные значения при одновременной фиксации диапазонов температур в зонах установки БА и внутри БА .
Последующую эксплуатацию БА производим с поддержанием температур в зоне установки аппаратуры в пределах диапазона

Далее в процессе полета КА продолжаем измерение текущих выходных характеристик БА u(t) и проверяем выполнение условия

При выполнении условия (3) производим терморегулирование в зоне установки аппаратуры в диапазоне температур .
В случае невыполнения условия (3) повторяем вышеуказанным образом цикл определения нового диапазона температур для терморегулирования БА в зоне ее установки с учетом выполнения условия

Далее, терморегулирование осуществляем во вновь определенном указанном диапазоне температур. В случае невыполнения условия (3) и выполнения при этом условия (4) производим новые тестовые измерения выходных характеристик БА. По результатам измерений фиксируем  , переходим к проверке условия (3) для вновь определенного диапазона
, переходим к проверке условия (3) для вновь определенного диапазона  и таким образом повторяем циклы терморегулирования до завершения полета КА.
и таким образом повторяем циклы терморегулирования до завершения полета КА.
На фиг.2, 3 показано в графическом виде влияние терморегулирования на выходные характеристики ГИВУС КА «Ямал», при этом по оси абсцисс введено обозначение текущего полетного времени КА. А по оси ординат:
TZ - температура в зоне установки прибора, °С;
T0S - температура основания прибора (в соответствии со схемой тепловой системы прибора на фиг.1), °С;
ϕX.Y,Z - углы рассогласования осей чувствительности гироблоков прибора от их номинального положения в приборной системе координат КА, построенной на принципах БИНС, угл. мин. Углы представлены по трем осям управления КА - тангажу, рысканию и крену соответственно.
Допустимый диапазон температур в зоне установки прибора [0,35°С].
В случае, представленном на фиг.2, текущая температура в зоне поддерживалась в диапазоне TZ˜8,5±0,5°С и ей соответствовала температура основания TOS˜44,2±0,5°С. При этом средний уход измеряемых параметров за 1,5 часа составил 0,09 угл. мин.
В случае, представленном на фиг.3, текущая температура в зоне поддерживалась в диапазоне от ˜18,8°С до ˜20,2°С и ей соответствовала температура TOS˜45,2±0,5°С. При этом средний уход измеряемых параметров составил за 1,5 часа ˜0,27 угл. мин.
Температура в зоне установки TZ представлена двумя графиками, полученными по телеметрической информации (ТМИ) с двух датчиков 21 (см. фиг.1). Остальная информация также представлена по результатам обработки ТМИ КА «Ямал».
Оба случая получены в процессе проведения тестовых измерений выходных характеристик ГИВУС для различных температур в зоне установки. Для примера на графиках представлены случаи получения оптимальных значений (на фиг.2) и максимального рассогласования осей чувствительности прибора относительно приборного базиса КА (на фиг.3). Для остальных значений TZ∈[TZ1, TZ2] были получены промежуточные значения ϕX.Y,Z.
Оба случая соответствуют необходимой точности для управления КА, так как максимальное отклонение погрешности выходного сигнала по каждому из каналов управления допускает 6 угл. мин на измерительной базе 12 часов. Однако, если в первом случае из-за оптимальных выходных характеристик ГИВУС можно «удержать связанный базис КА вместе с приборным от ухода», не прибегая к коррекции приборного базиса при помощи датчиков внешней информации примерно 60 часов полетного времени, то во втором случае указанное время составит примерно 20 часов.
Таким образом, в первом случае необходимо примерно в три раза реже включать датчики внешней информации для коррекции БИНС, чем во втором случае.
Учитывая то, что при помощи одних только датчиков внешней информации можно управлять ориентацией КА (см. [6]), уменьшение расхода их ресурса на коррекцию БИНС создает дополнительный резерв на выполнение определяющей динамической операции - поддержания заданной ориентации КА. Возможность решения указанной задачи на борту аппарата определяет его срок службы на орбите.
Таким образом, за счет предлагаемого терморегулирования в зоне установки прибора, можно продлить срок эксплуатации КА на орбите.
Рассмотренный случай не является единичным. На борту КА существует целый ряд БА, для которой требуется температурная настройка на реальные условия эксплуатации. Так, например, при радиоконтроле орбиты частотные характеристики бортовой аппаратуры служебного канала управления (модуляционные составляющие спектра передатчика) удавалось значительно улучшить за счет температурной настройки на реально сложившиеся условия эксплуатации. Информационно-телеметрические средства (ИТС) КА также требуют периодической аналогичной температурной настройки. В результате можно уменьшить число сбойной информации, получаемой с локальных коммутаторов дискретных и аналоговых параметров ИТС и т.д.
Литература
1. Космические аппараты. Под общей редакцией проф. К.П.Феоктистова. М., Военное издательство, 1983.
2. Космический аппарат блочно-модульного исполнения. Патент RU 2092398.
3. Навигация, наведение и стабилизация в космосе. Москва, Машиностроение, 1970 г.
4. Система обеспечения теплового режима КА «Ямал». Техническое описание. РКК «Энергия» им. С.П.Королева, 2002 г.
5. Е.И.Антонов, В.Е.Ильин, Е.А.Коленко, Ю.В.Петровский, А.И.Смирнов. Устройства для охлаждения приемников излучения. Ленинград, Машиностроение, 1969 г.
6. Л.А.Мирошниченко, В.А.Раевский, Г.М.Маркелов. Система ориентации и стабилизации спутника телевизионного вещания «Экран». Техническая кибернетика, №7, 1977 г., стр.18-26.


Изобретение относится к космической технике и может быть использовано для обеспечения теплового режима космических аппаратов. Согласно предлагаемому способу, в начале полета космического аппарата производят тестовые измерения выходных характеристик бортовой аппаратуры на протяжении всего допустимого диапазона температур в зоне ее установки. Фиксируют одновременно наиболее точные измеренные значения выходных характеристик и диапазоны температур в зоне установки и внутри бортовой аппаратуры. Во время полета космического аппарата измеряют текущие выходные характеристики бортовой аппаратуры, сравнивают их с наиболее точными и проверяют выполнение условия, согласно которому расхождение между измеренными и точными значениями выходных характеристик должно быть меньше допустимого значения. При выполнении этого условия производят терморегулирование в зоне установки бортовой аппаратуры в пределах зафиксированного ранее температурного диапазона. При невыполнении упомянутого условия проверяют выполнение второго условия, согласно которому текущее значение внутренней температуры бортовой аппаратуры в момент прекращения выполнения первого условия должно находиться в пределах зафиксированного ранее температурного диапазона внутри бортовой аппаратуры. При невыполнении второго условия определяют и фиксируют новый диапазон температур в зоне установки бортовой аппаратуры, для которого второе условие выполняется. При этом в случае выполнения первого условия производят терморегулирование в зоне установки бортовой аппаратуры в пределах нового температурного диапазона, а в случае невыполнения первого условия при выполнении второго условия повторяют тестовые измерения выходных характеристик бортовой аппаратуры и определяют новые диапазоны температур для терморегулирования бортовой аппаратуры указанным выше образом. Операции способа повторяют до завершения полета космического аппарата. Изобретение позволяет продлить срок эксплуатации космического аппарата за счет снижения расхода ресурса бортовой аппаратуры. 3 ил.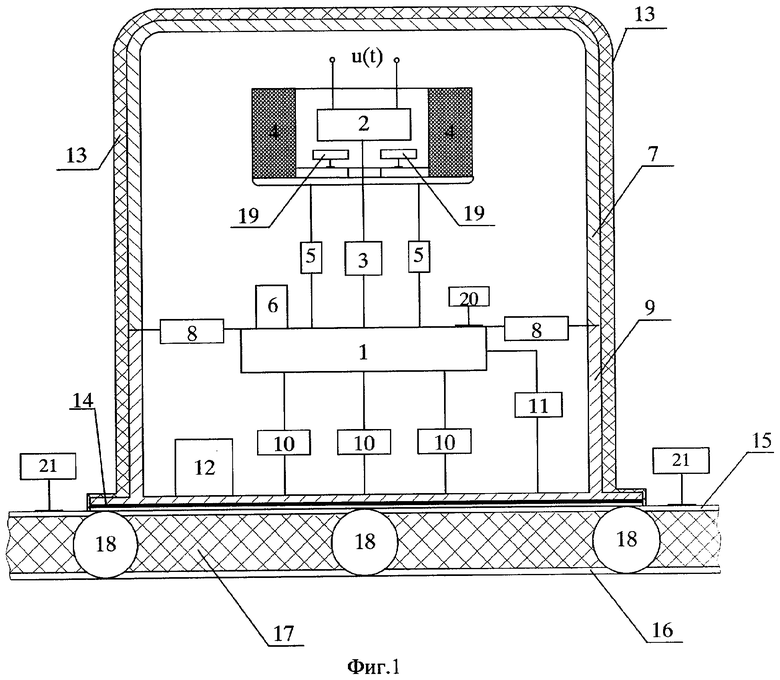
Способ терморегулирования бортовой аппаратуры космического аппарата, включающий измерение температуры в зоне установки бортовой аппаратуры, измерение внутренних температур бортовой аппаратуры, подвод тепловой энергии в зону установки бортовой аппаратуры и внутрь бортовой аппаратуры в случае достижения измеренными значениями температур нижнего предельного уровня допустимого диапазона и отвод тепловой энергии из зон установки бортовой аппаратуры и от бортовой аппаратуры в случае достижения измеренными значениями температур верхнего предельного уровня допустимого диапазона, отличающийся тем, что в начале полета космического аппарата производят тестовые измерения выходных характеристик бортовой аппаратуры un(t), где n=1, 2, 3, ... - число тестовых измерений, на протяжении всего допустимого диапазона температур [TZ1, TZ2] в зоне установки бортовой аппаратуры, фиксируют одновременно наиболее точные измеренные значения выходных характеристик бортовой аппаратуры  и диапазоны температур в зоне установки бортовой аппаратуры
и диапазоны температур в зоне установки бортовой аппаратуры  и внутри бортовой аппаратуры
и внутри бортовой аппаратуры  , далее в процессе полета космического аппарата измеряют текущие выходные характеристики бортовой аппаратуры u(t), сравнивают их с наиболее точными и проверяют выполнение условия
, далее в процессе полета космического аппарата измеряют текущие выходные характеристики бортовой аппаратуры u(t), сравнивают их с наиболее точными и проверяют выполнение условия

где Δu - допустимое значение расхождений между измеренными и точными значениями выходных характеристик бортовой аппаратуры, и, если условие (1) выполняется, производят терморегулирование в зоне установки бортовой аппаратуры в пределах температурного диапазона  , в противном случае проверяют выполнение условия
, в противном случае проверяют выполнение условия

где TB(tX) - текущее измеренное значение внутренней температуры бортовой аппаратуры в момент времени tX выхода за допустимое значение Δи расхождений между измеренными и точными значениями выходных характеристик бортовой аппаратуры, и, если условие (2) не выполняется, производят изменение условий терморегулирования в зоне установки бортовой аппаратуры до выполнения условия (2), при этом вновь определяют и фиксируют диапазон температур  в зоне установки бортовой аппаратуры, для которого выполняется условие (2), далее производят проверку выполнения условия (1) и в случае его выполнения производят терморегулирование в зоне установки бортовой аппаратуры в пределах вновь определенного температурного диапазона
в зоне установки бортовой аппаратуры, для которого выполняется условие (2), далее производят проверку выполнения условия (1) и в случае его выполнения производят терморегулирование в зоне установки бортовой аппаратуры в пределах вновь определенного температурного диапазона  , а в случае, если условие (1) не выполняется при выполнении условия (2), производят повторные тестовые измерения выходных характеристик бортовой аппаратуры
, а в случае, если условие (1) не выполняется при выполнении условия (2), производят повторные тестовые измерения выходных характеристик бортовой аппаратуры  на протяжении всего допустимого диапазона температур [TZ1, TZ2] в зоне установки бортовой аппаратуры, снова одновременно фиксируют наиболее точные измеренные значения выходных характеристик бортовой аппаратуры
на протяжении всего допустимого диапазона температур [TZ1, TZ2] в зоне установки бортовой аппаратуры, снова одновременно фиксируют наиболее точные измеренные значения выходных характеристик бортовой аппаратуры  и диапазоны температур в зоне установки бортовой аппаратуры
и диапазоны температур в зоне установки бортовой аппаратуры  и внутри бортовой аппаратуры
и внутри бортовой аппаратуры  , далее в процессе полета космического аппарата продолжают измерение текущих выходных характеристик бортовой аппаратуры u(t) и проверяют выполнение условия
, далее в процессе полета космического аппарата продолжают измерение текущих выходных характеристик бортовой аппаратуры u(t) и проверяют выполнение условия

при его выполнении продолжают терморегулирование в зоне установки бортовой аппаратуры в диапазоне температур  , в противном случае повторяют указанным выше образом цикл определения нового диапазона температур для терморегулирования в зоне установки бортовой аппаратуры с учетом выполнения условия
, в противном случае повторяют указанным выше образом цикл определения нового диапазона температур для терморегулирования в зоне установки бортовой аппаратуры с учетом выполнения условия

далее терморегулирование осуществляют во вновь определенном диапазоне температур, а в случае невыполнения условия (3) и выполнении при этом условия (4) производят новые тестовые измерения выходных характеристик бортовой аппаратуры указанным выше образом, по результатам которых определяют диапазоны температур для последующего терморегулирования в зоне установки бортовой аппаратуры и производят терморегулирование до завершения полета космического аппарата.
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 1995 |
|
RU2092398C1 |
| КОСМИЧЕСКИЙ АППАРАТ | 2003 |
|
RU2252178C1 |
| СОЛНЕЧНЫЙ ЗОНД | 1994 |
|
RU2076832C1 |
| US 6566633 В2, 20.05.2005 | |||
| JP 2003015746 А, 17.01.2003 | |||
| US 5823476 А, 20.10.1998. | |||

