Изобретение относится к космической технике и может быть применено для поддержания температурных режимов бортового оборудования (БО) космических аппаратов, функционирующих на геостационарных и круговых солнечно-синхронных орбитах, с периодически повторяющимися режимами работы. Предлагаемый способ может быть использован для поддержания заданных температур в пределах допустимых диапазонов в зонах радиационных панелей космических аппаратов. К указанным космическим аппаратам могут быть отнесены, например, спутники Земли, обеспечивающие связь, телекоммуникацию, телевещание, дистанционное зондирование Земли.
Одной из важнейших задач, решаемых на борту космического аппарата (КА), является поддержание заданного температурного режима его БО, поскольку даже кратковременное отклонение указанной температуры от допустимых пределов может привести к выходу из строя всего КА. На температуру БО КА и его частей во время его полета по орбите влияют, в основном, внешнее излучение Солнца и планет, ориентация КА относительно направления указанного излучения, а также величина собственного тепловыделения БО при смене режимов работы. Различные части БО на освещенном участке орбиты, в зависимости от ориентации КА относительно направления излучения на Солнце и планеты, подвергаются нагреву в различной степени. В то же время на теневом участке орбиты все оборудование КА подвергается охлаждению. Кроме того, на температуру частей БО влияет изменение их тепловыделения при изменении режимов работы. Заданный температурный режим БО КА может обеспечиваться пассивными и активными способами.
При пассивных способах терморегулирования для защиты БО от внешних излучений предусматривается использование, например, теплоизоляционных материалов, специальных покрытий, уменьшающих нагрев БО за счет препятствования проникновению внешнего излучения. Кроме того, пассивное терморегулирование может обеспечиваться за счет геометрической формы блоков КА, а также за счет его ориентации относительно источника излучения. Выполнение задачи сброса тепла в условиях вакуума может осуществляться путем излучения избытка тепла в космическое пространство, для чего, как известно, используются излучающие радиаторы и радиационные панели (РП). К недостаткам способов пассивного терморегулирования относятся низкая точность поддержания температуры, а также невозможность точного подвода, отвода или перераспределения тепла от отдельных элементов БО.
При активных способах терморегулирования с целью стабилизации температуры на борту КА осуществляется принудительный нагрев или охлаждение отдельных элементов БО. В этом случае используются системы с циркуляцией хладагента, имеющие электрические нагревательные элементы, которые преобразуют электрическую энергию на борту КА, получаемую, например, от солнечных батарей, в тепловую. Для подвода тепла используются теплообменные трубы с циркуляцией жидкости. Точность поддержания температуры в этом случае гораздо выше, чем при пассивном терморегулировании. В системах терморегулирования, выполненных на основе теплообменных труб, тепло от охлаждаемых источников передается к жидкости, которая затем охлаждается на специальных радиаторах, сбрасывающих тепло путем излучения в космическое пространство. В состав таких систем, как правило, входит имеющая низкие показатели термического сопротивления РП с размещенными на ней блоками бортового оборудования, тепловые трубы с нагревательными элементами, датчики температур, расположенные в зонах воздействия указанных нагревателей, а также радиаторы, обеспечивающие сброс тепла в космическое пространство. РП делится на зоны, на которых располагаются блоки бортового оборудования, то есть служебные системы. Недостатками активных систем терморегулирования является относительно низкая отказоустойчивость по отношению к пассивным системам, обусловленная большим количеством элементов, обеспечивающих выполнение указанной задачи.
Автоматическое управление терморегулированием осуществляется, как правило, бортовыми системами управления, выполненными на базе вычислительных комплексов, которые обеспечивают автоматическое регулирование температуры при помощи алгоритмов, реализуемых в виде программного обеспечения. РП разбивается на зоны, в которых размещаются датчики температуры, информация от которых в виде телеметрической информации поступает в наземный комплекс управления. В свою очередь, из наземного комплекса управления в бортовую систему управления КА поступают команды, позволяющие управлять настройками контура управления терморегулированием, а также осуществлять управление терморегуляторами. Система управления в соответствии с информацией, полученной от датчиков температур, обеспечивает автоматическое поддержание температурного режима БО путем включения нагревателей на время, необходимое для достижения необходимого значения температуры.
Наиболее близким является способ терморегулирования радиационных панелей КА, включающий измерение температур в зонах панелей датчиками температур и поддержание температур в пределах допустимого диапазона. При этом изменяют температуры на интервалах времени, определяемых ориентацией КА относительно Солнца и планет. После каждого из изменений температур в зоне измеряют температуру в прилегающих к ней зонах, фиксируя разность измеренных температур. Определяют температурные зависимости между зонами с учетом количества тепла, подводимого от установленных рядом с зонами смежных элементов. Дальнейшее терморегулирование в зонах производят с учетом определенных зависимостей, при этом в случае выхода текущих температур в зонах за пределы допустимого диапазона их увеличивают или уменьшают за счет регулирования количества тепла, подводимого к зонам от смежных элементов. В случае отказа элементов системы обеспечения теплового режима, терморегулирование в зоне производят путем подвода к ней тепла от соседних зон с работоспособными элементами. При этом обеспечивают выполнение условий, при которых были ранее определены температурные зависимости в зонах панели [1].
К недостаткам известного способа терморегулирования относятся следующие. Сбои и искажения информации, поступающей от датчиков температур в бортовую систему управления, вызываемые, например, статическими разрядами либо наводками в кабельной сети или аппаратуре, связанные с излучением Солнца, могут приводить к ошибкам управления трактом. В то же время выявление температурных зависимостей между зонами РП при отказах датчиков температур, принадлежащих одной из зон, во время функционирования КА является сложной задачей, так как указанные зависимости могут изменяться, например, ввиду деградации указанных датчиков. При отказах всех датчиков температур, размещенных на взаимно зависимых зонах РП и задействованных в контуре автоматического управления, поддержание температурного режима не представляется возможным.
Технической задачей предлагаемого изобретения является расширение функциональных возможностей известного способа управления системой терморегулирования КА путем повышения надежности и живучести за счет автоматического поддержания температурного режима при отказах датчиков температур, задействованных в контуре управления системы терморегулирования.
Указанный технический результат достигается тем, что в известном способе управления системой терморегулирования радиационных панелей космического аппарата, заключающемся в том, что измеряют температуру в i-x зонах радиационных панелей датчиками температур, где i=1, 2…n - номер зоны радиационной панели, изменяют температуру каждой зоны посредством терморегуляторов, разбивают период оборота космического аппарата вокруг Земли на фиксированные интервалы времени, которые определяются ориентацией космического аппарата относительно Солнца и планет, дополнительно разбивают каждый из фиксированных интервалов времени в каждой из зон на локальные интервалы времени, на которых соблюдаются повторяющиеся на витках орбиты одинаковые температурные условия, учитывающие изменение режимов работы установленных в них служебных систем, определяют по паспортным данным на установленные в зонах служебные системы соответствующие допустимые диапазоны температур, при которых обеспечивается их работоспособность, а также величины разбросов характеристик датчиков температур в каждой зоне, обусловленные точностью измерения, задают для каждой i-той зоны поддерживаемый диапазон температур, для которого должны выполняться соотношения:




где: i=1, 2, …n - номер зоны радиационной панели;







задают для каждой i-той зоны верхнюю и нижнюю границы допустимого отклонения температуры от границ поддерживаемого диапазона температур, измеренной в моменты окончания нагрева, как:


при этом 
где 

где: j=1, 2, …n1 - номер локального интервала времени в одном периоде оборота КА по орбите;
k=1, 2, …n2 - номер витка орбиты;
Δτijk, Δτij(k+1) - длительности включения нагрева на k-том и (k+1)-ом витках орбиты в i-той зоне на j-том локальном интервале времени;

КА, имеющие круговые орбиты, вращаются вокруг Земли практически с постоянной угловой скоростью и фиксированным периодом оборота, при этом каждой точке указанной орбиты может быть поставлен в соответствие фиксированный момент времени указанного периода.
В зависимости от положения КА относительно Солнца и Земли, например, на освещенной или теневой части орбиты изменяются температурные условия, воздействующие на установленное БО. Кроме того, как правило, на определенных участках орбиты выполняются типовые изменения ориентации КА относительно направления излучения Солнца. При этом температурные условия для зон РП с установленным на них БО, находящихся на освещенной стороне КА, отличаются от условий для зон, находящихся на теневой стороне КА. В течение некоторого фиксированного интервала времени после изменения ориентации КА температурные воздействия на БО, установленного в зонах РП, обусловленные интенсивностью излучения Солнца, не изменяются. При этом на указанных интервалах времени в соответствии с возложенными на КА задачами осуществляется переключение режимов функционирования БО, в связи с чем может происходить изменение его тепловыделения, которое может привести, в свою очередь, к изменению температуры в соответствующих зонах РП. Таким образом, орбита КА может быть разбита на фиксированные интервалы времени с одинаковыми температурными условиями, обусловленные внешними воздействиями, которые, в свою очередь, могут быть разбиты на локальные интервалы, соответствующие установившимся режимам тепловыделения БО.
Например, КА, выполняющие функции дистанционного зондирования Земли на солнечно-синхронных орбитах, могут изменять ориентацию и переключение режимов аппаратуры в моменты времени, жестко связанные с определенными точками орбиты, например, для фотосъемки поверхности Земли. КА, функционирующие на геостационарных орбитах, обеспечивают связь или трансляцию теле- или радиосигналов, при этом они в фиксированные моменты времени осуществляют переключение приемопередающей аппаратуры. Указанные действия приводят к изменениям температур в зонах РП, повторяющимся на каждом витке орбиты.
Для реализации способа управления системой терморегулирования РП КА разбивают период оборота КА вокруг Земли на фиксированные интервалы времени, на каждом из которых внешние температурные воздействия на зоны РП приблизительно одинаковы и зависят, в основном, от положения КА относительно Солнца и Земли. В свою очередь, каждый фиксированный интервал разбивают на локальные интервалы, на которых повторяются одинаковые температурные условия, обусловленные режимами работы БО на каждом витке орбиты КА.
На фиг. 1 представлен полет КА по орбите Земли, разбитой на локальные интервалы времени, с установленной на нем РП, на фиг. 2 - график изменения температуры на локальных интервалах времени для одной зоны РП, соответствующий участкам полета КА, на фиг. 3 - РП с установленным на ней оборудованием системы терморегулирования, на фиг. 4 - структурная схема взаимодействия контура управления терморегулированием одной зоны РП КА с наземным комплексом управления, на фиг. 5 - графики управления терморегулированием.
Способ управления системой терморегулирования радиационной панели космического аппарата осуществляется следующим образом.
На фиг. 1 представлен пример деления орбиты КА с установленной на нем РП на фиксированные и локальные участки полета, где:
1 - КА;
2 - РП, разбитая на зоны;
3 - круговая орбита КА;
4 - Земля;
5, 6, 7, 8, 9, 10 - точки смены локальных участков полета;
11 - направление излучения Солнца;
12 - тень Земли.
ΚΑ 1 с установленной на нем РП 2 вращается по орбите 3 вокруг Земли 4 с постоянной угловой скоростью ω. Орбита 3 в точках 5, 10 разбита на два фиксированных участка, которым соответствует освещенная и теневая ее части. Каждому из указанных участков орбиты поставлены в соответствие фиксированные интервалы времени. Фиксированные участки орбиты, в свою очередь, разбиты на локальные участки 5-6, 6-7, 7-8, 8-9, 9-10, 10-5, соответствующие локальным интервалам времени, на каждом из которых повторяются температурные условия, зависящие от положения КА и режимов работы БО. Локальные интервалы характеризуются степенью нагрева зон РП 2, зависящей от положения указанной панели относительно направления излучения Солнца 11, а также от тепловыделения установленного в ней БО, то есть служебных систем. Периодически КА проходит через тень Земли 12. Участок орбиты между точками 5 и 6 соответствует изменению режимов работы БО, установленного в зонах РП 2, а следовательно, и его тепловыделения перед началом выполнения возложенных на КА 1 задач. Участок орбиты между точками 6 и 7 соответствует изменению ориентации ΚΑ 1 относительно направления излучения Солнца 11 при выполнении возложенных на KA 1 задач, а следовательно, изменению температурных условий в зонах РП 2. Участок орбиты между точками 7 и 8 соответствует максимальной степени нагрева РП 2 излучением Солнца 11. Участок орбиты между точками 8 и 9 соответствует изменению ориентации KA 1, а следовательно, и воздействующих на зоны РП 2 температурных условий относительно направления на Солнце при завершении выполнения возложенных на KA 1 задач. Участок орбиты между точками 9 и 10 соответствует изменению режимов работы БО, установленного в зонах РП 2, а следовательно, и его тепловыделения при завершении выполнения возложенных на KA 1 задач перед входом в тень Земли 12. На участке орбиты между точками 10 и 5 KA 1, а следовательно, и БО в зонах РП 2 находятся в тени Земли 12, при этом РП 2 подвергается наибольшему охлаждению.
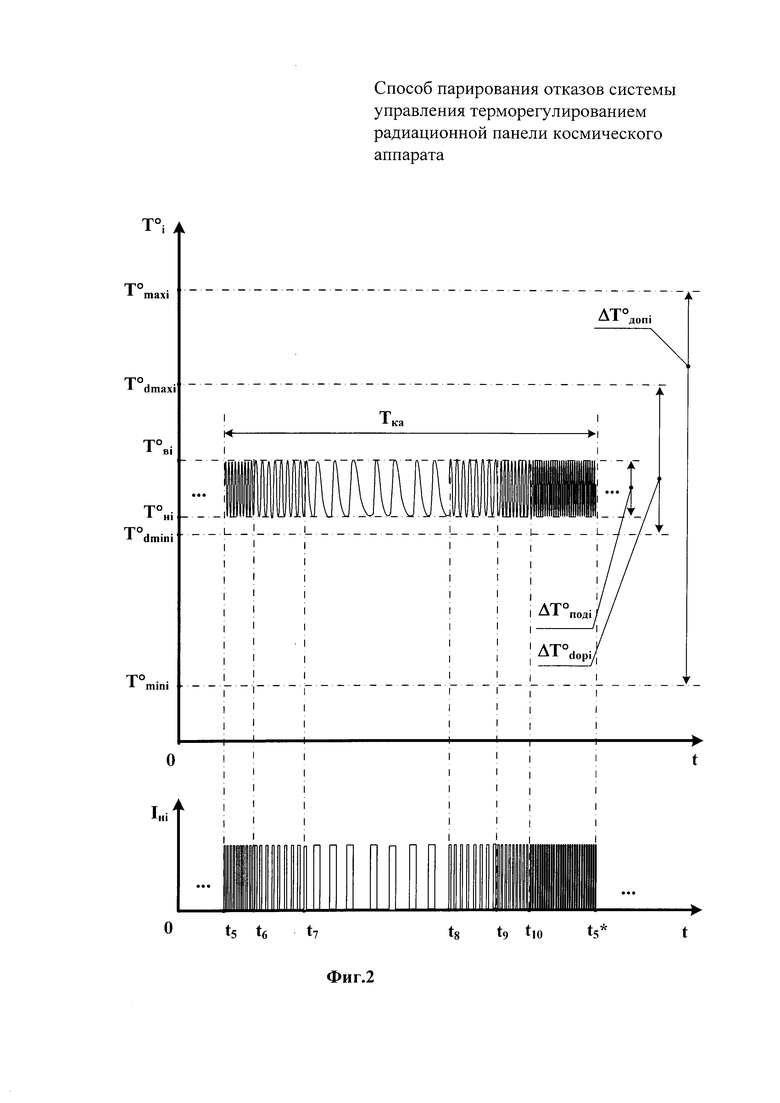
На фиг. 2 представлен график изменения температуры на локальных интервалах времени для одной зоны РП, соответствующий участкам полета КА, где:

i=1, 2, …n - номер зоны РП;
Iнi - ток нагревателей i-той зоны РП;
t - время;
Tка - период оборота КА вокруг Земли.








t5, t6, t7, t8, t9, t10 - моменты смены локальных интервалов времени в зоне РП на текущем периоде оборота КА вокруг Земли;

Для реализации предлагаемого способа по паспортным данным на служебные системы, то есть на установленные в каждой зоне РП блоки БО, определяют максимальную и минимальную температуры допустимого диапазона температур, при которых обеспечивается их работоспособность. Величина допустимого диапазона температур i-той зоны РП вычисляют как:

Экспериментально исследуют температурные условия в каждой i-той зоне РП с установленными на ней нагревателями и тепловыми трубами. Значительные перепады температур, выходящие за границы допустимого диапазона температур, могут приводить к отказам установленного на борту КА электронного оборудования, а вследствие расширения и сжатия конструктивных элементов к нарушениям контактных, паяных, сварных, механических соединений, что, в свою очередь, вызывает сбои и отказы указанного оборудования. В связи с этим целесообразно минимизировать изменения температуры в границах указанного допустимого диапазона температур. По паспортным данным определяют величины разбросов характеристик датчиков температур в каждой зоне, обусловленные точностью измерения. В границах допустимого диапазона температур в каждой i-той зоне РП задают поддерживаемый диапазон температур, для которого должны выполняться соотношения:

где: 
Для минимизации колебаний температур в i-той зоне РП в середине допустимого диапазона задают поддерживаемый диапазон температур.
Для каждой зоны задают верхнюю и нижнюю границы допустимого отклонения температуры от границ поддерживаемого диапазона температур, измеренной в моменты окончания нагрева, как:

при этом
где
Экспериментально для каждого локального интервала в каждой зоне РП определяют необходимый фиксированный ток нагревателей, количество включений, а также суммарную длительность включения нагрева. В процессе проектирования и экспериментов для каждого локального интервала i-той зоны РП задают характеристики нагревательных элементов, которые обеспечивают изменение температуры в границах поддерживаемого диапазона при отсутствии излучения Солнца и минимально возможном тепловыделении установленного в i-той зоне БО. Ток потребления нагревательных элементов каждой i-той зоны РП имеет, как правило, фиксированную величину. С целью минимизации затрат электроэнергии на борту КА, как правило, на РП в i-той зоне РП устанавливают нагревательные элементы, потребляющие фиксированные токи, близкие к минимально необходимым значениям.
Во время функционирования КА на орбите, начиная с первого локального интервала времени, отсчитывают орбитальное время в диапазоне от 0 до Tка.
Система управления периодически осуществляет включение нагрева, обеспечивающего повышение температуры, путем подачи тока на нагреватели. Моменты смены локальных интервалов времени, t5, t6, t7, t8, t9, t10, 
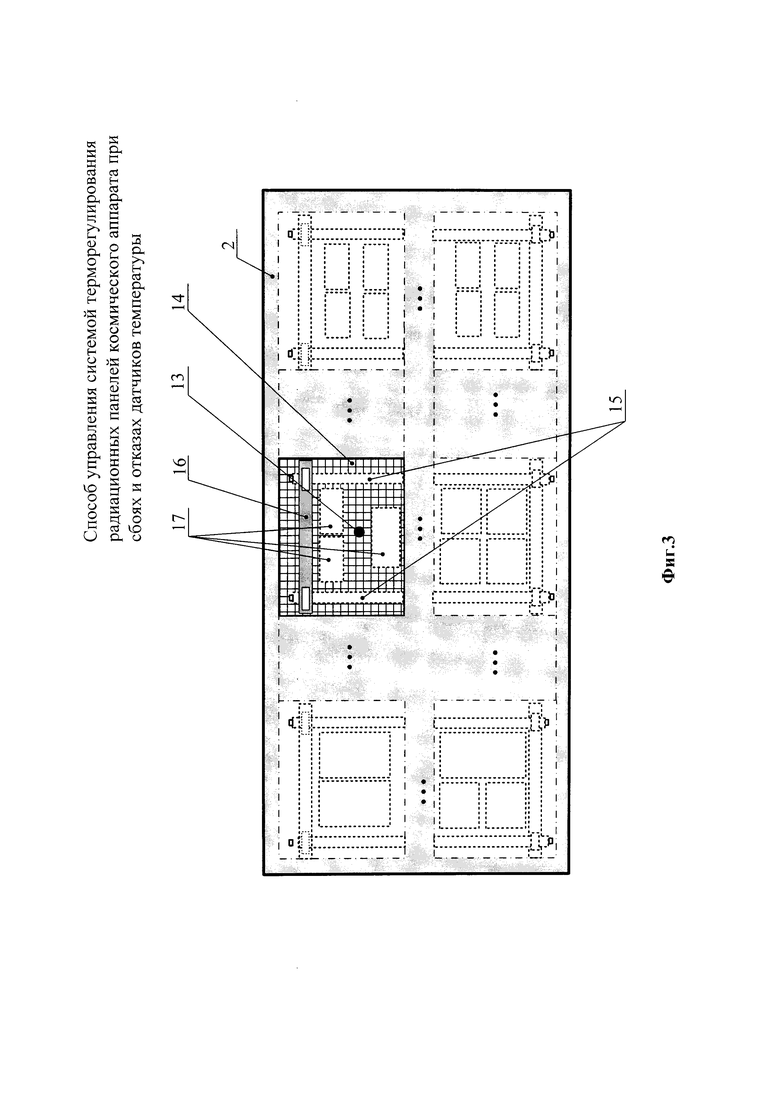
На фиг. 3 представлена РП с установленным на ней оборудованием системы терморегулирования, где:
13 - датчик температуры, установленный в зоне РП;
14 - зона РП;
15 - тепловые трубы, установленные в зоне РП;
16 - нагревательные элементы, установленные в зоне РП;
17 - места установки служебных систем в зоне РП.
РП 2 разделена на несколько зон с установленными на них служебными системами 17, которые являются блоками БО. В зоне 14 РП 2 установлен датчик температуры 13, тепловые трубы 15 с нагревательными элементами 16. Для служебных систем 17 должны быть обеспечены требуемые температурные условия.
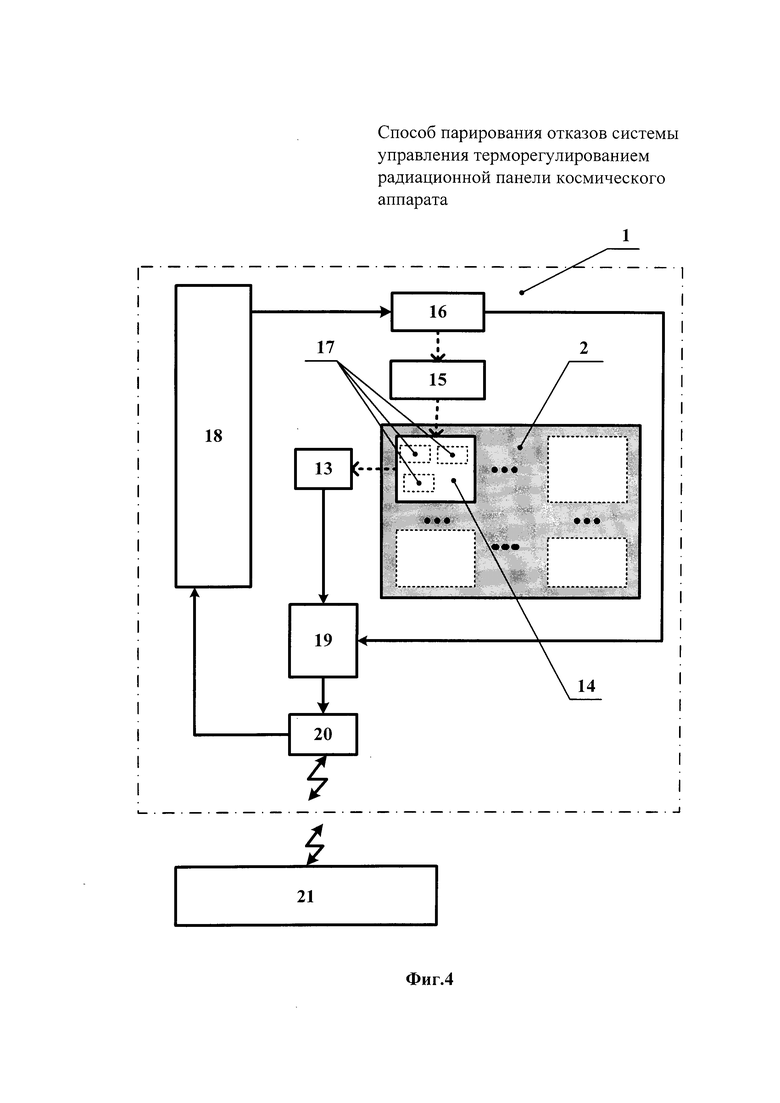
На фиг. 4 представлена структурная схема взаимодействия контура управления терморегулированием одной зоны РП КА с наземным комплексом управления, где:
18 - бортовая система управления;
19 - система телеметрических измерений КА;
20 - бортовой радиотехнический комплекс;
21 - наземный комплекс управления.
РП 2 имеет несколько зон с установленными на них служебными системами, которые являются блоками БО. В зоне 14 РП 2 установлены тепловые трубы 15 с нагревательными элементами 16, а также служебные системы 17, для которых должны быть обеспечены требуемые температурные условия. Температура в зоне 14 измеряется при помощи датчика температуры 13. Измеренная датчиком 13 температура, а также значения тока нагревательных элементов 16 поступают в систему телеметрических измерений 19 и далее в бортовой радиотехнический комплекс 20. Бортовая система управления 18 осуществляет включение и отключение нагревательных элементов 16, которые осуществляют, в свою очередь, нагрев тепловых труб 15. Тепловые трубы 15 обеспечивают распределение тепла в зоне 14 РП. После отключения нагрева охлаждение зоны осуществляется путем сброса тепла РП в космическое пространство. Информация из системы телеметрических измерений 19 через бортовой радиотехнический комплекс 20 передается в наземный комплекс управления 21. Из наземного комплекса управления 21 через бортовой радиотехнический комплекс 20 по радиоканалу в бортовую систему управления 18 поступают команды непосредственного включения и отключения нагревателей, а также команды, позволяющие корректировать периоды и длительности включения указанных нагревателей.
В реальных условиях функционирования КА температура зоны РП может выходить за границы поддерживаемого диапазона температур, что обуславливается, например, изменением плоскости орбиты КА относительно направления излучения Солнца в течение года, неравномерным характером указанного излучения, нештатной работой БО, изменением ориентации КА, отличающейся от ориентации на предыдущих витках орбиты, и другими факторами.
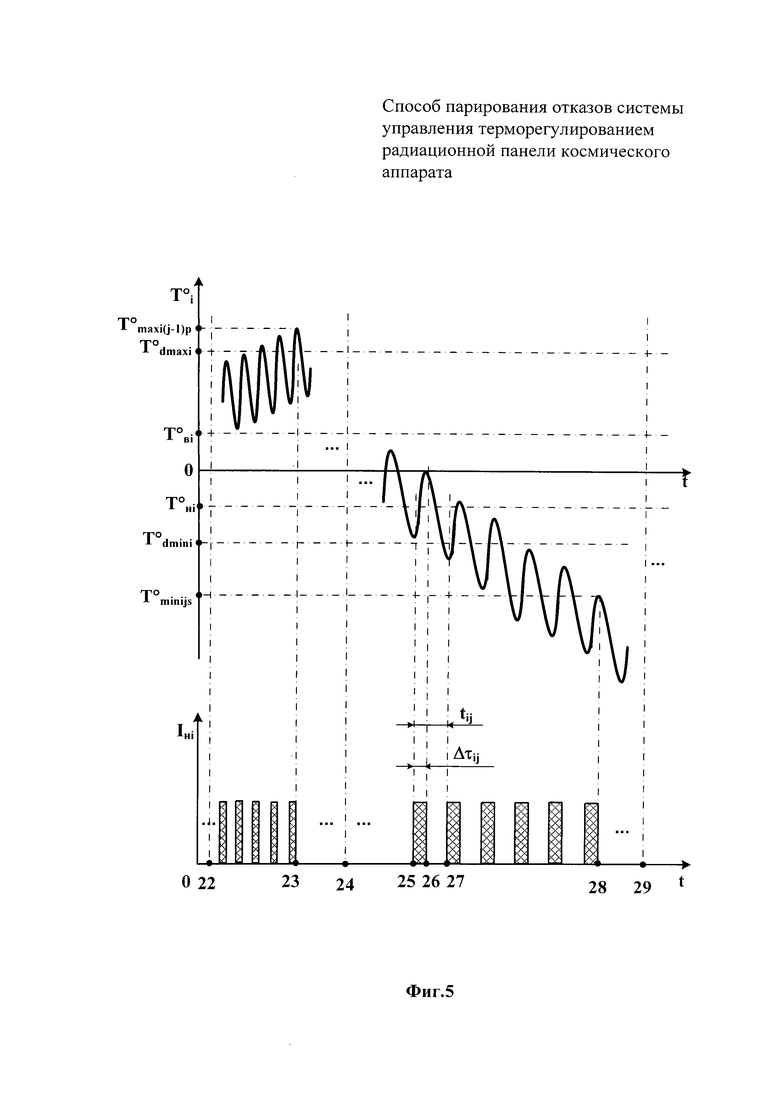
На фиг. 5 представлены графики управления терморегулированием, где: 22, 24, 29 - моменты смены локальных интервалов i-той зоны РП;
23 - момент третьего превышения верхней границы допустимого отклонения температуры, измеренной на j-том локальном интервале в i-той зоне;
25 - момент начала нагрева i-той зоны РП на j-том локальном интервале;
26 - момент окончания нагрева i-той зоны РП на j-том локальном интервале;
27 - момент окончания периода нагрева i-той зоны РП на j-том локальном интервале;
28 - момент третьего выхода температуры за нижнюю границу допустимого отклонения поддерживаемого диапазона температур на j-том локальном интервале в i-той зоне в момент окончания нагрева;
j - номер локального интервала времени, j=1, 2, …m, m - количество локальных интервалов в одном периоде оборота КА по орбите;
Δτij - длительность нагрева в i-той зоне на j-том локальном интервале;
Δtij - период нагрева в i-той зоне на j-том локальном интервале;


p - номер периода нагрева на (j-1)-ом локальном интервале, p=1, 2, …m1, m1 - количество периодов нагрева на (j-1)-ом локальном интервале;
s - номер периода нагрева на j-том локальном интервале, s=1, 2, …m2, m2 - количество периодов нагрева на j-том локальном интервале.
Период формирования токов нагрева i-той зоны на j-том локальном интервале составляет Δtij, длительность включения нагрева время Δτij. В моменты 23 и 28 температура i-той зоны РП в моменты окончания нагрева



Во время полета КА на каждом k-том витке орбиты по окончании каждого j-того локального интервала времени вычисляют усредненное приращение температур, измеренных в моменты окончания нагрева в каждой i-той зоне РП, как:

где: 




s - номер периода нагрева на j-том локальном интервале, s=1, 2, …m2, m2 - количество периодов нагрева на j-том локальном интервале.
В случае если на k-том витке орбиты в моменты окончания нагрева температура i-той зоны на j-том локальном интервале не менее трех раз выходит за верхнюю или нижнюю границы ее допустимого отклонения, то есть 
где: k - номер витка орбиты, k=1, 2, …n2, n2 - количество витков орбиты;
Δτijk, Δτij(k+1) - длительности включения нагрева на k-том и (k+1)-том витках орбиты в i-той зоне на j-том локальном интервале времени.
Предлагаемый способ может быть использован при сбоях или отказах в трактах передачи информации в бортовую систему управления от датчиков температур, непосредственно задействованных в контуре управления системой терморегулирования, что позволяет повысить надежность и живучесть системы терморегулирования, а следовательно, увеличить сроки эксплуатации КА в целом.
Источники информации
1. Патент РФ №2310587, кл. B64G 1/50, 20.11.2007 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ТЕРМОРЕГУЛИРОВАНИЯ РАДИАЦИОННЫХ ПАНЕЛЕЙ КОСМИЧЕСКОГО АППАРАТА ПРИ СБОЯХ И ОТКАЗАХ ДАТЧИКОВ ТЕМПЕРАТУР | 2015 |
|
RU2586783C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ВОЗДУХА НА БОРТУ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2739649C1 |
| СПОСОБ ТЕРМОРЕГУЛИРОВАНИЯ РАДИАЦИОННЫХ ПОВЕРХНОСТЕЙ КОСМИЧЕСКИХ АППАРАТОВ | 2003 |
|
RU2262468C2 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСИНХРОННОЙ 24-ЧАСОВОЙ ОРБИТЕ | 2013 |
|
RU2535353C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА ПО ВЫРАБАТЫВАЕМОМУ ТОКУ | 2014 |
|
RU2578416C1 |
| СПОСОБ ТЕРМОРЕГУЛИРОВАНИЯ РАДИАЦИОННЫХ ПАНЕЛЕЙ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2310587C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РАСПОЛОЖЕННЫХ ПОД УГЛАМИ К ОСЯМ СВЯЗАННОГО БАЗИСА РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2341418C2 |
| СПОСОБ ТЕРМОРЕГУЛИРОВАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2262469C2 |
| СПУТНИКОВАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ МЕЖДУ СПУТНИКАМИ-АБОНЕНТАМИ И НАЗЕМНЫМ ПУНКТОМ | 1999 |
|
RU2155447C1 |

Изобретение относится к системам терморегулирования космических аппаратов (КА). Способ заключается в том, что измеряют температуру в зонах радиационных панелей (РП) датчиками температур, изменяют температуру каждой зоны посредством терморегуляторов, разбивают период оборота КА вокруг Земли на фиксированные интервалы времени, которые определяют ориентацией КА относительно Солнца и планет. Разбивают каждый из фиксированных интервалов времени в каждой из зон на локальные интервалы времени, на которых соблюдаются повторяющиеся на витках орбиты одинаковые температурные условия. Определяют по паспортным данным на установленные в зонах служебные системы соответствующие допустимые диапазоны температур, при которых обеспечивается их работоспособность, а также величины разбросов характеристик датчиков температур в каждой зоне. Для каждого локального интервала в каждой i-той зоне определяют количество включений и суммарную длительность включений нагрева, вычисляют период включения нагрева, а также длительность включения нагрева на каждом периоде. Техническим результатом изобретения является повышение надежности и живучести системы терморегулирования КА. 5 ил.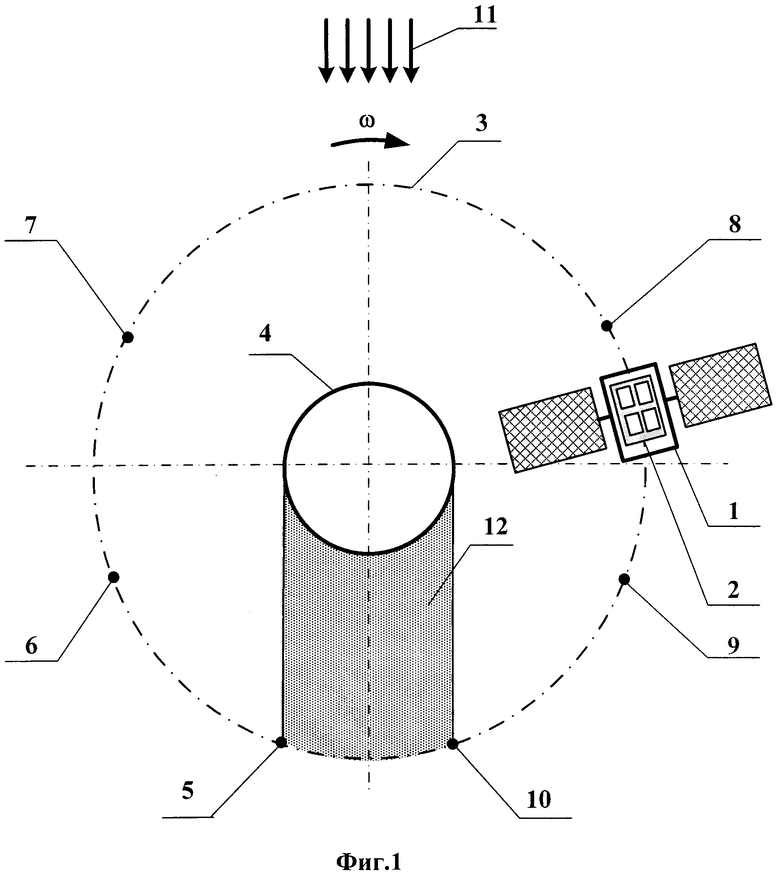
Способ управления системой терморегулирования радиационной панели космического аппарата, заключающийся в том, что измеряют температуру в i-x зонах радиационных панелей датчиками температур, где i=1,2…n - номер зоны радиационной панели, изменяют температуру каждой зоны посредством терморегуляторов, разбивают период оборота космического аппарата вокруг Земли на фиксированные интервалы времени, которые определяются ориентацией космического аппарата относительно Солнца и планет, отличающийся тем, что разбивают каждый из фиксированных интервалов времени в каждой из зон на локальные интервалы времени, на которых соблюдаются повторяющиеся на витках орбиты одинаковые температурные условия, учитывающие изменение режимов работы установленных в них служебных систем, определяют по паспортным данным на установленные в зонах служебные системы соответствующие допустимые диапазоны температур, при которых обеспечивается их работоспособность, а также величины разбросов характеристик датчиков температур в каждой зоне, обусловленные точностью измерения, задают для каждой i-той зоны поддерживаемый диапазон температур, для которого должны выполняться соотношения:
ΔT°допi=(T°imax-T°imin),
ΔT°подi=(T°iв-T°iн),
ΔT°дтi<ΔT°подi<0,1·ΔT°допi,
(T°maxi-T°вi)=(T°нi-T°mini),
где: i=1,2,…n - номер зоны радиационной панели;
Δ°Tдопi - допустимый диапазон температур;
T°maxi, T°mini - соответственно максимальная и минимальная граница допустимого диапазона температур в i-той зоне;
ΔТ°подi - поддерживаемый диапазон температур в i-той зоне;
Т°вi, T°нi - соответственно верхняя и нижняя границы поддерживаемого диапазона температур в i-той зоне;
ΔТ°дтi - разброс характеристик датчика температуры, установленного в i-той зоне РП, обусловленный точностью измерения,
задают для каждой i-той зоны верхнюю и нижнюю границы допустимого отклонения температуры от границ поддерживаемого диапазона температур, измеренной в моменты окончания нагрева, как:
(T°maxi-ΔT°подi)>T°dmaxi>(ΔT°подi+T°вi);
(T°вi-ΔT°подi)>T°dmini>(ΔT°mini+T°подi);
при этом (T°dmaxi-T°вi)=(T°вi-T°dmini),
где T°dmaxi, T°dmini - соответственно верхняя и нижняя границы допустимого отклонения температуры, измеренной в моменты окончания нагрева, от границ поддерживаемого диапазона температур в i-той зоне, экспериментально, при имитации реальных условий функционирования системы для каждого локального интервала в каждой i-той зоне, определяют количество включений и суммарную длительность включений нагрева, вычисляют для каждого локального интервала каждой i-той зоны период включения нагрева как отношение длительности локального интервала к количеству включений нагрева, а также длительность включения нагрева на каждом периоде как отношение суммарной длительности включения нагрева к количеству указанных включений, во время полета космического аппарата по орбите на локальных интервалах в каждой i-той зоне включают нагрев в соответствии с вычисленными периодами и длительностями включения, по окончании каждого локального интервала вычисляют усредненное приращение температуры как отношение суммы приращений температур, измеренных в моменты окончания нагрева относительно значения температуры, достигнутой в момент окончания нагрева на последнем периоде предыдущего локального интервала, к количеству включений нагрева, в случае, если температура i-той зоны, измеренная на локальном интервале в моменты окончания нагрева, выходит за верхнюю или нижнюю границы ее допустимого отклонения не менее трех раз, то после окончания указанного локального интервала прекращают периодическое включение нагрева до установки температуры в границах поддерживаемого диапазона температур, после чего продолжают периодическое включение нагрева на следующем локальном интервале, на новом витке орбиты для локального интервала времени, на котором произошло превышение температуры, измеренной в моменты окончания нагрева, не менее трех раз за пределы границ ее допустимого отклонения, задают новые период и длительность включения нагрева как:

где: j=1,2,…n1 - номер локального интервала времени в одном периоде оборота КА по орбите;
k=1,2,…n2 - номер витка орбиты;
Δτijk, Δτij(k+1) - длительности включения нагрева на k-том и (k+1)-ом витках орбиты в i-той зоне на j-том локальном интервале времени;
ΔT°ijk - усредненное приращение температур, измеренных в i-той зоне РП, в моменты окончания нагрева на k-том витке орбиты на j-том локальном интервале.
| СПОСОБ ТЕРМОРЕГУЛИРОВАНИЯ РАДИАЦИОННЫХ ПАНЕЛЕЙ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2310587C2 |
| СИСТЕМА ТЕРМОРЕГУЛИРОВАНИЯ | 1999 |
|
RU2168690C2 |
| JP 2003015746 A, 17.01.2003. | |||

