Бортовой оптический локатор (ОЛ) для определения параметров сближения двух космических аппаратов (КА) предназначен для применения в системах управления движением (СУД) КА.
При сближении и последующей стыковке одного КА с другим КА могут использоваться для поиска и определения параметров сближения бортовой оптический локатор (ОЛ), устанавливаемый на одном КА, и источники света с заданной частотой модуляции, устанавливаемые на втором (кооперируемом) КА.
В состав известных бортовых ОЛ для СУД КА входит сканирующее устройство, установленное перед объективом ОЛ и обеспечивающее обзор заданного пространства предметов за счет соответствующего разворота оптических элементов (например, зеркал) с регистрацией углов разворота, фотоприемник (например, фотодиод, диссектор), а также блоки управления и обработки информации.
В процессе сканирования фотоприемник ОЛ фиксирует попадание в поле зрения объектива ОЛ источников света, установленных на кооперируемом КА. Обработка сигналов от фотоприемника и данных от датчиков углов разворота позволяет определить параметры сближения КА (расстояние и направление на кооперируемый КА, а также их производные по времени) для последующей выдачи сигналов управления на двигатели КА с целью сближения и стыковки (Лазерная локация, ред. Н.Д.Устинов, М. Изд. Машиностроение. 1984, стр.216).
К недостаткам таких оптических локаторов относятся значительные габаритно-массовые характеристики и повышенное энергопотребление, что объясняется необходимостью размещения перед объективом ОЛ сканирующего устройства с электромеханическими приводами и датчиками углов разворота. Кроме того, наличие в бортовом ОЛ сканирующего устройства с электромеханическими приводами, работающими в условиях воздействия различных факторов космического полета (глубокий вакуум, отсутствие конвективного теплообмена, значительные перепады температур на корпусе и т.п.), понижает надежность таких ОЛ.
Задачей данного предложения является создание бортового ОЛ с минимальными габаритно-весовыми характеристиками, с малым энергопотреблением и высокой надежностью для определения параметров сближения двух КА, а также повышение достоверности выделения полезного сигнала от установленных на втором КА источников света с высокочастотной модуляцией на фоне возможных световых помех, создаваемых элементами конструкции КА.
Указанная задача решается тем, что предлагаемый бортовой ОЛ для определения параметров сближения двух КА содержит на одном КА:
- объектив,
- сканирующий узел в виде цифрового микрозеркального устройства, расположенного в фокальной плоскости объектива,
- фотоприемник,
- проекционную систему фотоприемника,
- блок обработки сигналов с фотоприемника, связанный с блоком управления сканирующим узлом и вычисления параметров сближения,
а на другом КА установлены не менее двух модулированных источников света, взаимное положение изображений которых на цифровом микрозеркальном устройстве определяет взаимное расположение двух сближающихся КА в приборной системе координат оптического локатора.
Для выделения полезного сигнала с высокочастотной модуляцией применен фотоприемник с постоянной времени τфп, характеризующей инерционные свойства фотоприемника:
τфп«TFмод,
где τфп - постоянная времени фотоприемника,
ТFмод - период модуляции оптического излучения.
Селекция и обработка сигнала с фотоприемника, например, лавинного фотодиода (в частности - ЛФДГ-70) производится в блоке обработки сигналов, настроенном на частоту модуляции источников излучения.
На чертеже изображена схема бортового оптического локатора, установленного на одном КА, и источники света, установленные на другом КА.
На чертеже изображено:
1 - объектив оптического локатора;
2 - сканирующий узел в виде цифрового микрозеркального устройства;
3 - проекционная система фотоприемника;
4 - фотоприемник;
5, 6 - источники излучения;
7 - блок обработки сигналов (БОС);
8 - блок управления сканирующим узлом и вычисления параметров сближения (БУС ВПС);
9 - система управления движением космического аппарата (СУД КА).
В качестве сканирующего узла 2 применено цифровое микрозеркальное устройство, например Digital Micromirror Device (DMD) фирмы Texas Instruments, которое широко применяется в портативных мультимедийных проекторах.
DMD представляет собой устройство, которое является микроэлектронной механической системой и пространственным модулятором света.
В качестве примера ниже приведены параметры двух современных DMD:
1) 0.7XGA SDR 12 с диагональю 0,7 дюйма, количеством микрозеркал 1024×768, размером микрозеркал 13,8 мкм и углом разворота микрозеркала 12 градусов.
2) 1.1 SXGA SDR с диагональю 1,1 дюйма, количеством микрозеркал 1280×1024, размером микрозеркал 17,0 мкм и углом разворота микрозеркала 10 градусов.
Каждое микрозеркало может занимать два положения путем его разворота на определенный угол, например 12 град (или 10 град). При одном положении (рабочем) попавшее через объектив ОЛ на микрозеркало излучение отражается и через проекционную систему фотоприемника 3 попадает на чувствительную поверхность фотоприемника 4. При другом положении микрозеркала (исходном) отраженное излучение проходит мимо системы 3 и поглощается в конструкции ОЛ.
При расположении в фокальной плоскости объектива ОЛ 1 сканирующего узла 2, представляющего собой микрозеркальное цифровое устройство, каждому микрозеркалу будет соответствовать определенное направление в пространстве предметов, т.е. по номеру микрозеркала можно определить направление в пространстве предметов. Очевидно, что погрешность определения направления будет зависеть от размеров микрозеркал и фокусного расстояния объектива ОЛ:
σ≈arctg(Lpix/F0),
где σ - погрешность определения направления на источник излучения,
Lpix - размер микрозеркала,
F0 - фокусное расстояние объектива ОЛ.
ОЛ работает следующим образом.
ОЛ, установленный на одном КА, производит обзор заданного пространства с целью поиска источников света 5 и 6, установленных на другом КА (кооперируемом), путем переключения каждого микрозеркала сканирующего узла 2 из исходного положения в рабочее положение и обратно в исходное. Управление микрозеркалами производится по специальным алгоритмам БУС ВПС 8. При переключении в рабочее положение микрозеркала, на котором объективом ОЛ 1 построено изображение источника света, отраженный свет через проекционную систему фотоприемника 3 попадет на фотоприемник 4. Сигнал с фотоприемника 4 после усиления, селекции и преобразования в цифровой код в блоке обработки сигнала 7 поступает в блок управления сканирующим узлом и вычисления параметров сближения 8, где с учетом алгоритмов управления микрозеркалами определяется номер микрозеркала, отразившего свет от источника на фотоприемник, и таким образом определяется направление на источник в приборной системе координат. Полученные направления на источники света, установленные на известном расстоянии между собой на кооперируемом КА, позволяют определить параметры сближения двух КА (направление, расстояние и их производные по времени).
Для обеспечения поиска в зоне±15 град и использовании, например, DMD типа 0.7 XGA SDR 12 с размером микрозеркал L=13,8 мкм и объектива ОЛ 1 с фокусным расстоянием F0≈35 мм направление на источник света может быть определено с погрешностью:
σ=arctg(0,0138/35)≈1,4 угл. мин.
Указанные зона обзора и погрешность измерения направлений вполне удовлетворяют требованиям, которые предъявляются к бортовым оптическим локаторам для определения параметров сближения КА.
Полученные в блоке БУС ВПС 8 данные передаются по соответствующему каналу обмена в систему управления движением космического аппарата 9 для выполнения необходимых расчетов и проведения последующих динамических операций с целью сближения и стыковки КА.
Таким образом использование микрозеркального цифрового устройства, расположенного в фокальной плоскости объектива ОЛ, позволяет организовать обнаружение источников света и определение параметров сближения двух КА, а использование быстродействующего фотоприемника (τфп«ТFмод) в сочетании с блоком обработки, настроенным на частоту модуляции источников света на кооперируемом КА, позволяет селектировать эти источники от световых помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ КОЛЛИМАТОР | 2016 |
|
RU2664542C2 |
| ПРОЕКЦИОННАЯ СИСТЕМА С ТОРЦЕВОЙ ПРОЕКЦИЕЙ И ВИДЕОПРОЕКТОР ДЛЯ ЭТОЙ СИСТЕМЫ | 2011 |
|
RU2606010C2 |
| КОЛЛИМАТОР | 2021 |
|
RU2766096C1 |
| ПРОЕКЦИОННАЯ СИСТЕМА И СПОСОБ С РЕГУЛИРОВКОЙ СКЛАДНОГО ЗЕРКАЛА И ИНТЕГРИРУЮЩЕГО СТЕРЖНЯ | 2021 |
|
RU2837799C1 |
| Способ и система защиты детектора канала оптической связи в системах космической оптической связи от засветки точечными и протяженными источниками света | 2020 |
|
RU2751989C1 |
| СТЕРЕОПРОЕКЦИОННАЯ СИСТЕМА | 2005 |
|
RU2322771C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С НИМ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2474844C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2468383C1 |
| ПРОЕКЦИОННАЯ ОПТИЧЕСКАЯ СИСТЕМА | 2005 |
|
RU2313813C2 |
| УСТРОЙСТВО ИМИТАЦИИ ДИНАМИЧЕСКОЙ СЦЕНЫ | 2022 |
|
RU2789277C1 |
Изобретение относится к измерительным средствам систем управления движением, в частности космических аппаратов (КА), и может быть использовано при сближении и стыковке КА. Предлагаемый локатор содержит объектив, расположенный в его фокальной плоскости, сканирующий узел в виде цифрового микрозеркального устройства, фотоприемник с проекционной системой, блок обработки сигналов с фотоприемника, блок управления сканирующим узлом и источники излучения с высокочастотной модуляцией. Данные источники (не менее двух) установлены на одном из КА, а остальные указанные элементы локатора - на другом КА. Блок управления сканирующим узлом объединен с блоком вычисления параметров сближения КА. Получаемые в этом блоке данные передаются в систему управления движением КА в процессе сближения. В предлагаемом локаторе происходит отделение полезного сигнала указанных источников света от возможных световых помех, создаваемых элементами конструкции КА. Это обеспечивается путем применения фотоприемника с постоянной времени, много меньшей периода модуляции принимаемого оптического излучения. Техническим результатом изобретения является создание бортового локатора минимальных габаритов и массы, с малым энергопотреблением и повышенной надежностью определения параметров сближения двух КА. 1 ил.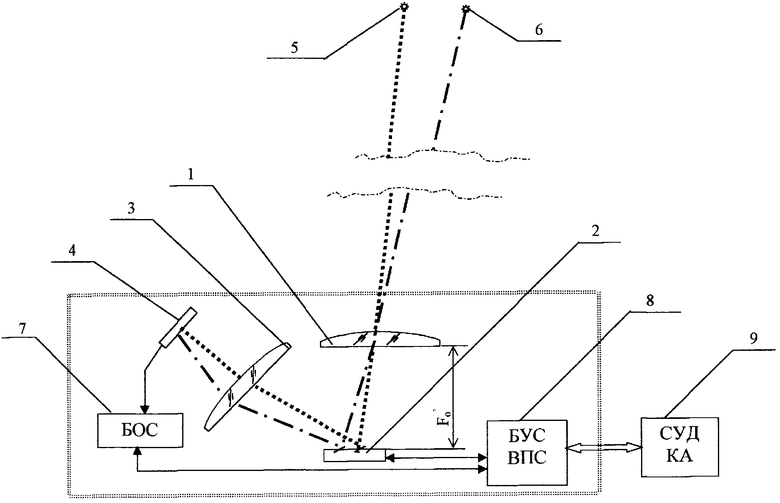
Бортовой оптический локатор для определения параметров сближения двух космических аппаратов, содержащий объектив, сканирующий узел в виде цифрового микрозеркального устройства, расположенного в фокальной плоскости объектива, фотоприемник, проекционную систему фотоприемника, блок обработки сигналов с фотоприемника, блок управления сканирующим узлом и источники излучения, свет которых отражается на фотоприемник, отличающийся тем, что не менее двух источников с высокочастотной модуляцией установлены на заданном расстоянии друг от друга на одном из космических аппаратов, а остальные указанные элементы локатора - на другом космическом аппарате, при этом блок управления сканирующим узлом объединен с блоком вычисления параметров сближения аппаратов, а получаемые в этом блоке данные передаются в систему управления движением космического аппарата в процессе сближения.
| US 5914783 А, 22.06.1999 | |||
| Лазерная локация./ Под ред | |||
| Н.Д.Устинова | |||
| - М.: Машиностроение, 1984, с.216 | |||
| Способ измерения коэффициентов пропускания оптических материалов и коэффициентов отражения зеркал | 1980 |
|
SU868375A1 |
| ВИКУЛИН И.М., СТАФЕЕВ В.И | |||
| Физика полупроводниковых приборов | |||
| - М.: Радио и связь, 1990, с.52, 58-59. | |||

