Изобретение относится к оптическим способам определения взаимного положения и взаимной ориентации объектов и может быть использовано при контроле и управлении стыковкой и разделением космических аппаратов - КА, сборкой крупногабаритных изделий в космосе, а также в иных областях техники, в которых необходим контроль взаимного положения изделий или их частей.
Известны оптические способы определения параметров взаимного положения и взаимной ориентации объектов по результатам измерения на одном объекте с помощью угломерного приемника углов визирования реперных точек, расположенных на другом.
Известен программный комплекс автоматизированного визуального мониторинга процесса стыковки КА с Международной космической станцией - МКС, позволяющий в автоматическом режиме и реальном времени определять движение КА относительно МКС (Автоматический мониторинг стыковки космического корабля с орбитальной станцией по видеоинформации. Богуславский А.А., Сазонов В.В., Соколов С.М., Смирнов А.И., Сайгираев Х.У. ИПМ им. М.В.Келдыша РАН, М., 2004 г. http://www.keldysh.ru/papers/2004/prep74/prep2004_74.html). Угломерным оптическим приемником в этом случае служит телевизионная камера (ТВ-камера), установленная на КА. Реперными точками являются белые метки в виде квадратов и прямоугольников, которые образуют окружность, расположенную рядом со стыковочным узлом МКС, и прямой крест на конце стержня, установленного в центре реперной окружности перпендикулярно ее плоскости. Телевизионное изображение МКС, полученное ТВ-камерой, передается на Землю, где производится его обработка - идентификация реперных точек на телевизионном изображении, определение их углов визирования и вычисление параметров взаимного положения и взаимной ориентации. К недостаткам данного способа относятся низкая надежность автоматического распознавания реперных точек на телевизионном изображении, а также невозможность получения телевизионного изображения, как при отсутствии освещения МКС, так и при интенсивной засветке ТВ-камеры внешними источниками, например при прямой солнечной засветке.
Признаки настоящего изобретения, совпадающие с признаками аналога:
- измерительную систему строят из комплекта реперных оптических точек, который устанавливают на первом объекте, и измерительного комплекта, который устанавливают на втором объекте;
- данные топологической привязки, т.е. координаты реперных точек в системе координат первого объекта и положение и ориентация измерительной системы координат измерительного комплекта в системе координат второго объекта, считают известными;
- в измерительной системе координат измеряют углы визирования реперных оптических точек;
- вычисление параметров взаимного положения и взаимной ориентации объектов производят с использованием результатов измерения углов визирования реперных точек и данных топологической привязки.
Известна оптоэлектронная измерительная система для определения параметров сближения двух КА (патент RU №2304288, 2004 г.) - наиболее близкая по технической сущности к патентуемому изобретению, которая принята за прототип изобретения. Известная система состоит из измерительного комплекта, который содержит объектив, расположенный в его фокальной плоскости, сканирующий узел в виде цифрового микрозеркального устройства, фотоприемник с проекционной системой, блок обработки сигналов с фотоприемника, блок управления сканирующим узлом, и комплекта реперных излучателей, который содержит источники оптического излучения (не менее двух) с высокочастотной модуляцией. Оптические излучатели устанавливаются на одном из КА и используются как реперные точки, а измерительный комплект - на другом КА. В измерительном комплекте происходит отделение полезного сигнала указанных источников света от возможных световых помех, создаваемых элементами конструкции КА.
Недостатком известной измерительной системы является то, что для однозначного определения параметров взаимного положения и взаимной ориентации КА при использовании комплекта реперных излучателей, содержащего менее четырех реперных излучателей, необходимо либо вводить ограничения на допустимые значения кинематических параметров, либо привлекать дополнительную внешнюю информацию о взаимном положении КА, поскольку для однозначного автономного определения параметров взаимного положения и взаимной ориентации объектов по результатам измерения углов визирования реперных точек необходимо не менее четырех реперных точек (Геометрические преобразования. П.С.Моденов, А.С.Пархоменко, 1961 г., М.: изд. МГУ, стр.144). Кроме того, не предусмотрены меры по обеспечению работоспособности измерительной системы в условиях прямой солнечной засветки фотоприемника (в частности, рекомендованный для использования в качестве примера лавинный фотодиод ЛФДГ-70 в условиях прямой солнечной засветки переходит в режим насыщения) и не определены меры по снижению погрешности измерений, возникающей при переотражениях излучения реперных излучателей от объектов.
Признаки настоящего изобретения, совпадающие с признаками прототипа:
- измерительную систему строят из комплекта реперных оптических точек, который устанавливают на первом объекте, и измерительного комплекта, который устанавливают на втором объекте;
- данные топологической привязки, т.е. координаты реперных точек в системе координат первого объекта и положение и ориентация измерительной системы координат измерительного комплекта в системе координат второго объекта считают известными;
- в качестве реперных точек используют источники оптического излучения с высокочастотной модуляцией;
- в измерительной системе координат измеряют углы визирования реперных оптических излучателей;
- вычисление параметров взаимного положения и взаимной ориентации объектов производят с использованием результатов измерения углов визирования реперных точек и данных топологической привязки.
Настоящее изобретение - способ определения взаимного положение объектов решает задачу построения измерительной системы и процедуры обработки результатов измерений, обеспечивающих однозначное определение параметров взаимного положения и взаимной ориентации двух объектов при автономном использовании этой измерительной системы.
Технический результат настоящего изобретения - обеспечение однозначного определения параметров взаимного положения и взаимной ориентации двух объектов, минимизация требуемого для обеспечения однозначности числа реперных излучателей, возможность проведения измерений в условиях прямой солнечной засветки оптического измерительного приемника и повышение точности измерений при возникновении переотражений сигналов реперных оптических излучателей от объектов.
Сущность патентуемого способа определения взаимного положения объектов поясняется описанием примеров его реализации и чертежами, на которых представлены:
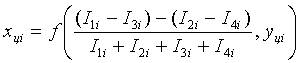
Фиг.1. Взаимосвязь векторов R, ti, d и ui.
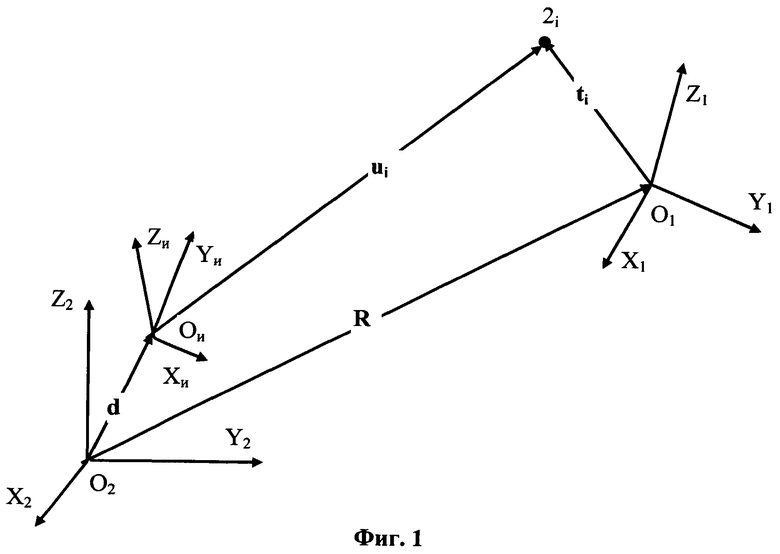
Фиг.2. Схема измерительной системы.
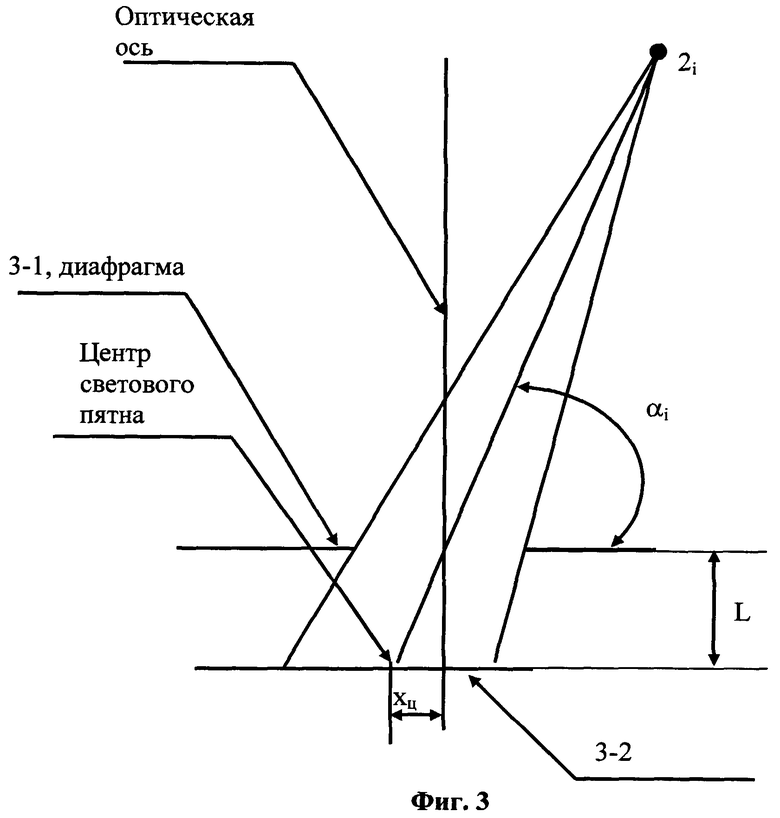
Фиг.3. Оптическая схема измерений.
Фиг.4. Расположение оптического пятна.
На фиг.1÷4 введены следующие обозначения:
(X1,Y1,Z1) - система координат СК1, связанная с первым объектом; (X2,Y2,Z2) - система координат СК2, связанная со вторым объектом; (Хи,Yи,Zи) - измерительная система координат ИСК оптического измерительного приемника; 1 - синтезатор; 2i - реперный оптический излучатель по номером i; F1,…, Fi,…, FN - частоты модуляции реперных оптических излучателей; 3 - оптический измерительный приемник; 3-1 -оптический узел; 3-2 - М-элементный координатно-чувствительном фотоприемник; 3-3 - М-канальный усилитель; 4 - блок анализа и вычислений; I, II, III, IV - номера элементов четырехэлементного координатно-чувствительного фотоприемника.
Настоящее изобретение имеет различные варианты реализации. Выбор конкретной реализации настоящего изобретения обусловлен функциональными задачами, областью и условиями его практического использования.
1. Способ определения взаимного положения объектов включает создание измерительной системы, состоящей из установленного на первом объекте комплекта оптических реперов, включающего реперные оптические излучатели, для которых известны векторы ti, задающие положение i-го реперного оптического излучателя в системе координат СК1, связанной с первым объектом, и из установленного на втором объекте оптического измерительного комплекта, включающего блок анализа и вычислений - БАВ и оптический измерительный приемник - ОИП, для измерительной системы координат - ИСК которого известны вектор d, задающий начало ИСК в системе координат СК2, связанной со вторым объектом, и матрица поворота - Ри из ИСК в СК2.
Задачей настоящего изобретения является определение вектора R, задающего начало СК1 в СК2, и матрицы поворота - Р из СК1 в СК2 - параметров, которые однозначно задают взаимное положение и взаимную ориентацию двух объектов.
R и Р определяют из решения системы уравнений оптических измерений, каждое из которых выражает взаимосвязь векторов R, ti, d и ui (см. фиг.1):
R+Pti-Pиui-d=0, i=1, 2,…, N,
где ui - векторы, задающие положение i-го реперного оптического излучателя в ИСК.
Способ определения взаимного положения объектов реализуют по схеме фиг.2.
В комплект оптических реперов включают N, но не менее трех, реперных оптических излучателей 2i и синтезатор 1, в состав оптического измерительного приемника 3 вводят оптический узел 3-1, М-элементный координатно-чувствительный фотоприемник 3-2 и М-канальный усилитель 3-3.
С помощью синтезатора 1 модулируют мощность излучения каждого реперного оптического излучателя 2i на отличной от других частоте повторения Fi, периодически вырабатывая одновременно на всех частотах временные метки.
Временные метки можно вырабатывать различными способами. Например, если в качестве опорной частоты синтезатора выбрать частоту F1, остальные частоты формируют по правилу Fi=F1+k(i-1), где k - целое число. Тогда через периоды времени T=1/k на каждой из частот сигналы будут совпадать по фазе. В момент совпадения фаз на каждой частоте Fi вырабатывается временная метка, например кодовая группа импульсов.
Из пришедшего излучения от каждого реперного оптического излучателя 2i в оптическом измерительном приемнике 3 с помощью оптического узла 3-1 (см. фиг.3) на М-элементном координатно-чувствительном фотоприемнике 3-2 формируют световое пятно. Возникающие в элементах координатно-чувствительного фотоприемника 3-2 фототоки
 ,
,
где j - номер фоточувствительного элемента координатно-чувствительного фотоприемника, iji - составляющая ij, определяемая мощностью Pji, пришедшей на этот элемент от реперного оптического излучателя 2i.
Фототоки ij усиливают М-канальным усилителем 3-3, из выходных сигналов которого Ij в блоке анализа и вычислений 4 формируют две группы сигналов: пропорциональные iji сигналы Iji, которые выделяют из Ij с помощью частотной селекции, и сигналы  .
.
Сигналы Iji измеряют. По значениям Iji для каждого реперного оптического излучателя 2(i) определяют величину смещения энергетического центра светового пятна - xцi, yцi в плоскости фоточувствительного слоя координатно-чувствительного фотоприемника 3-2 относительно оптической оси оптического измерительного приемника 3. По полученным значениям xцi, yцi и известному значению L - расстоянию между задней главной плоскостью оптического узла 3-1 и плоскостью фоточувствительного слоя фотодиодов координатно-чувствительного фотоприемника 3-2 вычисляют углы визирования αi, βi реперных оптических излучателей по формуле:
αi=arctg(xцi/L),
βi=arctg(yцi/L).
Например, при использовании в качестве координатно-чувствительного фотоприемника 3-2 двухкоординатного четырехэлементного фотоприемника, состоящего из четырех плоских изолированных друг от друга фотодиодов, обозначенных на фиг.4 номерами I, II, III, IV, а в качестве оптического узла 3-1 - диафрагмы (см. фиг.3) величины xцi, yцi определяют по градуировочным характеристикам:
 ,
,  ,
,
которые вычисляют или снимают экспериментально, а при вычислении углов визирования αi, βi в качестве L берут расстояние между плоскостью диафрагмы и плоскостью фоточувствительного слоя фотодиодов.
Сигналы Si используют для определения в ИСК величин δuki - разностей расстояния uk до произвольно выбранного опорного реперного оптического излучателя 2k и расстояний ui=|ui| до остальных реперных оптических излучателей 2i, для чего из сигналов Si выделяют временные метки и измеряют их временные сдвиги τki относительно временных меток сигнала Sk, а величины δuki вычисляют по формуле:
δuki=Cτki, где С - скорость света.
Используя значения углов визирования и временных сдвигов для опорного реперного оптического излучателя 2k и еще для любых двух произвольно выбранных реперных оптических излучателей, например 2m и 2р, определяют uk по формуле:

ui с i≠k определяют по формуле:
ui=uk+δuki,
где cosνij=hihj/|hi||hj|, hi T=(1, tgαi, tgβi), rij=|rij|, rij=ti-tj.
Векторы ui однозначно определяют по формуле:
ui=uihi/|hi|.
Единственность полученных значений ui следует из процедуры их определения.
Таким образом, в результате определения ui в системе уравнений оптических измерений стали известны все геометрические параметры - ui, ti, d, Ри, которые необходимы для однозначного определения R и Р.
R и Р находят, решая систему уравнений оптических измерений, например, методом минимизации невязок (Справочник по математике для научных работников и инженеров. Г.Корн, Т.Корн, 1984 г., М.: Наука, стр.659-662), заключающейся в определении значений R и Р, при которых достигается минимум следующей функции F(R,P):

2. Вторым вариантом патентуемого способа определения взаимного положения объектов является его модификация для случая прямой солнечной засветки оптического измерительного приемника 3, при которой применение собирающей оптики (объективов и линз) может привести к разрушению координатно-чувствительного фотоприемника 3-2 или к его переводу в режим насыщения, при котором величины Iji не зависят от величин Pji.
Для обеспечения измерений в условиях прямой солнечной засветки в измерительном оптическом приемнике в качестве оптического узла используют диафрагмы, которые сохраняют освещенность координатно-чувствительного фотоприемника 3-2 от внешних источников света на естественном уровне, а в качестве координатно-чувствительного фотоприемника используют координатно-чувствительные кремниевые p-i-n фотоприемники, у которых фототоки насыщения не наступают при уровнях падающей световой мощности, соответствующих уровням прямой солнечной засветки, при использовании в качестве усилителя 3-3 фототоков усилителей с малыми входными сопротивлениями.
3. Третьим перспективным направлением реализации патентуемого способа определения взаимного положения объектов является вариант, который позволяет повысить точность определения параметров взаимного положения и взаимной ориентации двух объектов при возникновении переотражений сигналов реперных оптических излучателей от объектов.
Переотражения сигналов реперных излучателей могут возникнуть, например, при измерениях на протяженных объектах сложной формы. При возникновении переотражений на оптический измерительный приемник 3 на одной и той же частоте пульсаций Fi будут приходить неразличимые для блока анализа и вычислений 4 сигналы: один полезный с направления на реперный оптический излучатель 2i и переотраженные сигналы помех с других направлений, которые будут искажать результаты измерения углов визирования реперного оптического излучателя 2i.
При использовании в реперных оптических излучателях в качестве излучающих элементов лазерных когерентных излучателей на входе оптического измерительного приемника будут интерферировать векторы напряженности электромагнитного поля полезного сигнала - Еc и сигнала помехи - Еп, т.е. вектор напряженности входного сигнала Евх будет равен:
 ,
,
где k - коэффициент ослабления сигнала за счет отражений от объектов и распространения, k<l; φ - фазовый сдвиг Еп относительно Еc.
Величина напряженности входного сигнала - Евх будет зависеть от величины фазового сдвига сигналов. Максимальное отличие Евх от величины напряженности полезного сигнала Ес будет, когда Еc и Еп будут в фазе или противофазе, т.е. при максимальном влиянии помехи Евх=(1±k)Ec, входной фототок iвx=ic+iп=µ[(1±k)]2Pc, где ic - фототок полезного сигнала, iп - фототок помех, µ - коэффициент пропорциональности, Pс - мощность полезного сигнала, а отношение помехи к сигналу  .
.
Согласно настоящему изобретению для уменьшения отношения помехи к сигналу в качестве излучающих элементов реперных оптических излучателей используют светодиодные излучатели, которые излучают широкополосные некогерентные неполяризованные оптические сигналы, для которых интерференция в принципе невозможна. В этом случае при приходе сигналов на вход оптического измерительного приемника 3 полезного сигнала и сигнала помехи будут складываться их мощности, т.е. при этом iвx=ic+iп=µ(1+k2) Pc, а отношение помехи к сигналу γ2=k2.
Таким образом, при возникновении переотражений сигналов реперных оптических излучателей от объектов использование в качестве излучающих элементов светодиодных излучателей, которые излучают широкополосные некогерентные неполяризованные оптические сигналы, снижает величину отношения помехи к сигналу по сравнению со случаем использования лазерных когерентных излучателей не менее чем в  раз и, следовательно, повышает точность определения параметров взаимного положения и взаимной ориентации объектов.
раз и, следовательно, повышает точность определения параметров взаимного положения и взаимной ориентации объектов.
4. Еще одним вариантом патентуемого способа определения взаимного положения объектов является его модификация для случая одновременного возникновения прямой солнечной засветки оптического измерительного приемника 3 и переотражений сигналов реперных оптических излучателей от объектов.
Для обеспечения измерений в этих условиях в измерительном оптическом приемнике 3 в качестве оптического узла 3-1 используют диафрагмы, в качестве координаточувствительного фотоприемника 3-2 используют координатно-чувствительные кремниевые p-i-n фотоприемники, в качестве усилителей 3-3 - усилители с малыми входными сопротивлениями, а в качестве излучающих элементов реперных оптических излучателей 2i используют светодиодные излучатели, которые излучают широкополосные некогерентные неполяризованные оптические сигналы.
Отличительные признаки изобретения
В комплект оптических реперов включают не менее трех реперных оптических излучателей и синтезатор, в состав оптического измерительного приемника вводят оптический узел, М-элементный координатно-чувствительном фотоприемник и М-канальный усилитель.
С помощью синтезатора модулируют мощность излучения каждого реперного оптического излучателя - РОИi на отличной от других частоте повторения Fi периодически вырабатывая одновременно на всех частотах временные метки.
Из пришедшего на оптический измерительный приемник излучения от каждого РОИi с помощью оптического узла на М-элементном координатно-чувствительном фотоприемнике формируют световое пятно. Возникающие в элементах координатно-чувствительного фотоприемника фототоки  (N - число реперных оптических излучателей, j - номер фоточувствительного элемента координатно-чувствительного фотоприемника; iji - составляющая ij, определяемая мощностью Pji, пришедшей на этот элемент от РОИi) усиливают М-канальным усилителем, из выходных сигналов которого Ij формируют две группы сигналов: пропорциональные iji сигналы Iji, которые выделяют из Ij с помощью частотной селекции и измеряют, и сигналы
(N - число реперных оптических излучателей, j - номер фоточувствительного элемента координатно-чувствительного фотоприемника; iji - составляющая ij, определяемая мощностью Pji, пришедшей на этот элемент от РОИi) усиливают М-канальным усилителем, из выходных сигналов которого Ij формируют две группы сигналов: пропорциональные iji сигналы Iji, которые выделяют из Ij с помощью частотной селекции и измеряют, и сигналы 
По измеренным значениям Iji и известному значению расстояния L между задней главной плоскостью оптического узла и плоскостью фоточувствительного слоя фотодиодов координатно-чувствительного фотоприемника вычисляют углы визирования αi, βi РОИi.
Сигналы Si используют для определения разностей δuki между расстоянием uk=|uk| до произвольно выбранного опорного реперного оптического излучателя - POHk и расстояниями ui=|ui| до остальных РОИi.
Используя значения углов визирования и временных сдвигов для РОИk и еще для любых двух произвольно выбранных реперных излучателей, например РОИm и РОИр, определяют uk по формуле:

ui с i≠k определяют по формуле:
ui=uk+δuki,
где cosνij=hihj/|hi||hj|, hi T=(1, tgαi, tgβi), rij=|rij|, rij=ti-tj.
Векторы ui определяют по формуле:
ui=uihi/|hi|.
R и Р находят из системы уравнений оптических измерений:
R+Pti-Pиui-d=0, i=1, 2,…, N
Модифицируют оптический измерительный приемник, используя в качестве оптического узла диафрагму, в качестве координаточувствительного фотоприемника - координатно-чувствительный кремниевый p-i-n фотоприемник, а в качестве усилителя фототоков - усилитель с малым входным сопротивлением.
Модифицируют реперный оптический излучатель, используя в качестве излучающих элементов светодиодные излучатели, которые излучают широкополосные некогерентные неполяризованные оптические сигналы.
Модифицируют оптический измерительный приемник, используя в качестве оптического узла диафрагму, в качестве координаточувствительного фотоприемника - координатно-чувствительный кремниевый p-i-n фотоприемник, а в качестве усилителя фототоков - усилитель с малым входным сопротивлением, и реперный оптический излучатель, используя в качестве излучающих элементов светодиодные излучатели, которые излучают широкополосные некогерентные неполяризованные оптические сигналы.
Реализация способа определения взаимного положения объектов
Измерительная система, реализующая патентуемый способ, может быть построена на основе хорошо освоенных элементов. В качестве излучающих элементов реперных оптических излучателей могут использоваться широко распространенные лазерные или светодиодные излучатели. В оптическом измерительном приемнике в качестве оптического узла могут быть использованы объективы, линзы или диафрагмы, в качестве координатно-чувствительного фотоприемника может быть, например, использован фотоприемник УФД16М на основе кремниевых p-i-n фотодиодов, а в качестве усилителей фототоков с малыми входными сопротивлениями - хорошо освоенные трансимпедансные усилители. Для создания синтезаторов частот, анализаторов и вычислителей существует развитая элементная база.
Таким образом, патентуемый способ определения взаимного положения объектов реализуем и обеспечивает объявленный технический результат - обеспечивает однозначное определение параметров взаимного положения и взаимной ориентации двух объектов, снижает минимально требуемое для обеспечения однозначности число реперных оптических излучателей до трех, обеспечивает возможность проведения измерений в условиях прямой солнечной засветки оптического измерительного приемника и повышает точность измерений при возникновении переотражений сигналов реперных оптических излучателей от объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДЛЯ ГРУППЫ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2016 |
|
RU2629758C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2168152C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| МИШЕНЬ СТРЕЛКОВОГО ТРЕНАЖЕРА С БЕГУЩИМИ ЛУЧАМИ | 1999 |
|
RU2147113C1 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| Устройство автоматической стыковки космических аппаратов в операциях орбитального обслуживания | 2017 |
|
RU2669763C1 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ | 1996 |
|
RU2099774C1 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ | 1996 |
|
RU2099775C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2424932C1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЕР С ОПТИКО-ЭЛЕКТРОННЫМ РЕГИСТРИРУЮЩИМ УСТРОЙСТВОМ | 1999 |
|
RU2168145C2 |

Способ определения взаимного положения объектов относится к оптическим способам определения взаимного положения и взаимной ориентации объектов и может быть использован при контроле и управлении стыковкой и разделением космических аппаратов, а также в иных областях техники, в которых необходим контроль взаимного положения изделий или их частей. Заявленный способ состоит в создании измерительной системы, состоящей из установленного на первом объекте комплекта оптических реперов, в который входят не менее трех реперных оптических излучателей, и из установленного на другом объекте оптического измерительного комплекта. Мощность излучения каждого реперного оптического излучателя модулируют на отличной от других частоте повторения, периодически вырабатывая одновременно на всех частотах временные метки. С помощью оптического измерительного комплекта определяют углы визирования каждого реперного оптического излучателя и разности между расстоянием до произвольно выбранного реперного оптического излучателя и расстояниями до остальных реперных оптических излучателей и по этим данным вычисляют параметры взаимного положения объектов. Достигаемый технический результат - однозначное определение параметров взаимного положения и взаимной ориентации двух объектов, минимизация требуемого для обеспечения однозначности числа реперных оптических излучателей, обеспечение возможности проведения измерений в условиях прямой солнечной засветки оптического измерительного приемника и повышение точности измерений при возникновении переотражений сигналов реперных оптических излучателей от объектов. 2 н. и 3 з.п. ф-лы, 4 ил.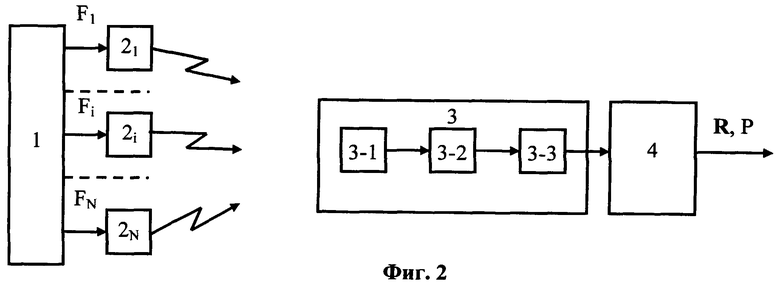
1. Способ определения взаимного положения объектов, включающий создание измерительной системы, состоящей из установленного на первом объекте комплекта оптических реперов, в который входят реперные оптические излучатели, для которых известны векторы ti, задающие положение i-гo реперного оптического излучателя РОИi в системе координат СК1, связанной с первым объектом, и из установленного на втором объекте оптического измерительного комплекта, в который входят блок анализа и вычислений БАВ и оптический измерительный приемник ОИП, для которого вектор d, задающий начало измерительной системы координат ИСК в системе координат СК2, связанной со вторым объектом, и матрица поворота Ри из ИСК в СК2 известны, отличающийся тем, что для определения взаимного положения объектов, заключающегося в определении вектора R, задающего начало СК1 в СК2, и матрицы поворота Р из СК1 в СК2, в комплект оптических реперов включают N, но не менее трех реперных оптических излучателей и синтезатор, в состав ОИП вводят оптический объектив, М-элементный координатно-чувствительный фотоприемник и М-канальный усилитель, с помощью синтезатора модулируют мощность излучения каждого РОИi на отличной от других частоте повторения Fi, периодически вырабатывая одновременно на всех частотах временные метки, из пришедшего на оптический измерительный приемник излучения от каждого РОИi с помощью оптического объектива формируют на М-элементном координатно-чувствительном фотоприемнике световое пятно, возникающие в элементах координатно-чувствительного фотоприемника фототоки  (j - номер фоточувствительного элемента координатно-чувствительного фотоприемника; iji - составляющая ij, определяемая мощностью Pji, пришедшей на этот элемент от РОИi) усиливают М-канальным усилителем, из выходных сигналов которого Ij в БАВ формируют две группы сигналов: пропорциональные iji сигналы Iji, которые выделяют из Ij с помощью частотной селекции и измеряют, и сигналы
(j - номер фоточувствительного элемента координатно-чувствительного фотоприемника; iji - составляющая ij, определяемая мощностью Pji, пришедшей на этот элемент от РОИi) усиливают М-канальным усилителем, из выходных сигналов которого Ij в БАВ формируют две группы сигналов: пропорциональные iji сигналы Iji, которые выделяют из Ij с помощью частотной селекции и измеряют, и сигналы  по измеренным значениям Iji определяют величину смещения энергетического центра светового пятна от РОИi - xцi, yцi в плоскости фоточувствительного слоя координатно-чувствительного фотоприемника относительно оптической оси ОИП, по полученным значениям xцi, yцi и известному значению расстояния L между задней главной плоскостью объектива и плоскостью фоточувствительного слоя фотодиодов координатно-чувствительного фотоприемника вычисляют углы визирования каждого POИi - αi, βi, по формулам: αi=arctg(xцi/L), βi=arctg(yцi/L), определяют значения δuki, которые равны разностям между расстоянием в ИСК - uk=|uk| до произвольно выбранного опорного реперного оптического излучателя РОИi и расстояниями ui=|ui| до остальных РОИi с i≠k, где ui - векторы, задающие положение РОИi в ИСК, для чего из сигналов Si выделяют временные метки, измеряют временные сдвиги τki сигналов Si с i≠k относительно временных меток сигнала Sk, а величины δuki вычисляют по формуле: δuki=Cτki (С - скорость света), определяют величину uk, используя данные для РОИk и еще для любых двух произвольно выбранных реперных оптических излучателей, например РОИm и РОИр, по формуле:
по измеренным значениям Iji определяют величину смещения энергетического центра светового пятна от РОИi - xцi, yцi в плоскости фоточувствительного слоя координатно-чувствительного фотоприемника относительно оптической оси ОИП, по полученным значениям xцi, yцi и известному значению расстояния L между задней главной плоскостью объектива и плоскостью фоточувствительного слоя фотодиодов координатно-чувствительного фотоприемника вычисляют углы визирования каждого POИi - αi, βi, по формулам: αi=arctg(xцi/L), βi=arctg(yцi/L), определяют значения δuki, которые равны разностям между расстоянием в ИСК - uk=|uk| до произвольно выбранного опорного реперного оптического излучателя РОИi и расстояниями ui=|ui| до остальных РОИi с i≠k, где ui - векторы, задающие положение РОИi в ИСК, для чего из сигналов Si выделяют временные метки, измеряют временные сдвиги τki сигналов Si с i≠k относительно временных меток сигнала Sk, а величины δuki вычисляют по формуле: δuki=Cτki (С - скорость света), определяют величину uk, используя данные для РОИk и еще для любых двух произвольно выбранных реперных оптических излучателей, например РОИm и РОИр, по формуле:

(rkm=|tk-tm|, rkp=|tk-tp|, rpm=|tp-tm|, δukm=Сτкm, δukp=Сτkр, cosνpm=hphm/|hp||hm|, cosνkm=hkhm/|hk||hm|, cosνkp=hkhp/|hk||hp|, hk T=(1, tgαk, tgβk), hm T=(1, tgαm, tgβm), hp T=(1, tgαp, tgβp), T - символ транспонирования), определяют остальные ui с i≠k по формуле ui=uk+δuki, определяют все векторы ui при i=1,2,…, N по формуле: ui=uihi/|hi|, где hi T=(1, tgαi, tgβi), а R и Р находят из системы уравнений оптических измерений: R+Pti-Pиui-d=0, i=l,2,…, N.
2. Способ по п.1, отличающийся тем, что в реперном оптическом излучателе в качестве излучающих элементов используют светодиодные излучатели, которые излучают широкополосные некогерентные неполяризованные оптические сигналы.
3. Способ определения взаимного положения объектов, включающий создание измерительной системы, состоящей из установленного на первом объекте комплекта оптических реперов, в который входят реперные оптические излучатели, для которых известны векторы ti, задающие положение i-гo реперного оптического излучателя РОИi в системе координат СК1, связанной с первым объектом, и из установленного на втором объекте оптического измерительного комплекта, в который входят блок анализа и вычислений БАВ и оптический измерительный приемник ОИП, для которого вектор d, задающий начало измерительной системы координат ИСК в системе координат СК2, связанной со вторым объектом, и матрица поворота Ри из ИСК в СК2 известны, отличающийся тем, что для определения взаимного положения объектов, заключающегося в определении вектора R, задающего начало СК1 в СК2, и матрицы поворота Р из СК1 в СК2, в комплект оптических реперов включают N, но не менее трех реперных оптических излучателей и синтезатор, в состав ОИП вводят диафрагму, М-элементный координатно-чувствительный фотоприемник и М-канальный усилитель, с помощью синтезатора модулируют мощность излучения каждого РОИi на отличной от других частоте повторения Fi, периодически вырабатывая одновременно на всех частотах временные метки, из пришедшего на оптический измерительный приемник излучения от каждого РОИi с помощью диафрагмы формируют на М-элементном координатно-чувствительном фотоприемнике световое пятно, возникающие в элементах координатно-чувствительного фотоприемника фототоки  (j - номер фоточувствительного элемента координатно-чувствительного фотоприемника; iji - составляющая ij, определяемая мощностью Pji, пришедшей на этот элемент от РОИi) усиливают М-канальным усилителем, из выходных сигналов которого Ij в БАВ формируют две группы сигналов: пропорциональные iji сигналы Iji, которые выделяют из Ij с помощью частотной селекции и измеряют, и сигналы
(j - номер фоточувствительного элемента координатно-чувствительного фотоприемника; iji - составляющая ij, определяемая мощностью Pji, пришедшей на этот элемент от РОИi) усиливают М-канальным усилителем, из выходных сигналов которого Ij в БАВ формируют две группы сигналов: пропорциональные iji сигналы Iji, которые выделяют из Ij с помощью частотной селекции и измеряют, и сигналы  , по измеренным значениям Iji определяют величину смещения энергетического центра светового пятна от РОИi - xцi, уцi в плоскости фоточувствительного слоя координатно-чувствительного фотоприемника относительно оптической оси ОИП, по полученным значениям xui, yui и известному значению расстояния L между плоскостью диафрагмы и плоскостью фоточувствительного слоя фотодиодов координатно-чувствительного фотоприемника вычисляют углы визирования каждого РОИi - αi, βi, по формулам: α=arctg(xцi/L), βi=arctg(yцi/L), определяют значения δuki, которые равны разностям между расстоянием в ИСК - uk=|uk| до произвольно выбранного опорного реперного оптического излучателя РОИi и расстояниями ui=|ui| до остальных РОИi с i≠k, где ui - векторы, задающие положение РОИi в ИСК, для чего из сигналов Si выделяют временные метки, измеряют временные сдвиги τki сигналов Si с i≠k относительно временных меток сигнала Sk, а величины δuki вычисляют по формуле: δuki=Cτki (С - скорость света), определяют величину uk, используя данные для РОИk и еще для любых двух произвольно выбранных реперных оптических излучателей, например РОИm и РОИр, по формуле:
, по измеренным значениям Iji определяют величину смещения энергетического центра светового пятна от РОИi - xцi, уцi в плоскости фоточувствительного слоя координатно-чувствительного фотоприемника относительно оптической оси ОИП, по полученным значениям xui, yui и известному значению расстояния L между плоскостью диафрагмы и плоскостью фоточувствительного слоя фотодиодов координатно-чувствительного фотоприемника вычисляют углы визирования каждого РОИi - αi, βi, по формулам: α=arctg(xцi/L), βi=arctg(yцi/L), определяют значения δuki, которые равны разностям между расстоянием в ИСК - uk=|uk| до произвольно выбранного опорного реперного оптического излучателя РОИi и расстояниями ui=|ui| до остальных РОИi с i≠k, где ui - векторы, задающие положение РОИi в ИСК, для чего из сигналов Si выделяют временные метки, измеряют временные сдвиги τki сигналов Si с i≠k относительно временных меток сигнала Sk, а величины δuki вычисляют по формуле: δuki=Cτki (С - скорость света), определяют величину uk, используя данные для РОИk и еще для любых двух произвольно выбранных реперных оптических излучателей, например РОИm и РОИр, по формуле:

(rkm=|tk _tm|, rkp=|tk-tp|, rрm=|tp-tm|, δukm=Сτkm, δukp=Cτkp, cosνpm=hphm/|hp||hm|, cosνkm=hkhm/|hk||hm|, cosνkp=hkhp/|hk||hp|, hk T=(1, tgαk, tgβk), hm T=(1, tgαm, tgβm), hp T=(1, tgαp, tgβp), T - символ транспонирования), определяют остальные ui с i≠k по формуле ui-uk+δuki, определяют все векторы ui при i=1,2,…, N по формуле: ui=uihi/|hi|, где hi T=(1, tgaαi, tgβi), а R и Р находят из системы уравнений оптических измерений: R+Pti-Pиui-d=0, i=l,2,…, N.
4. Способ по п.3, отличающийся тем, что в оптическом измерительном приемнике в качестве координатно-чувствительного фотоприемника используют координатно-чувствительный кремниевый p-i-n фотоприемник, а в качестве усилителя фототоков - усилитель с малым входным сопротивлением.
5. Способ по п.3, отличающийся тем, что в оптическом измерительном приемнике в качестве координатно-чувствительного фотоприемника используют координатно-чувствительный кремниевый p-i-n фотоприемник, в качестве усилителя фототоков - усилитель с малым входным сопротивлением, а в реперном оптическом излучателе в качестве излучающих элементов используют светодиодные излучатели, которые излучают широкополосные некогерентные неполяризованные оптические сигналы.
| БОРТОВОЙ ОПТИЧЕСКИЙ ЛОКАТОР ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СБЛИЖЕНИЯ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ | 2004 |
|
RU2304288C2 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 1990 |
|
RU2078309C1 |
| US 2004178945 A1, 16.09.2004 | |||
| СПОСОБ ПРОФИЛАКТИКИ РАЗВИТИЯ ТРОМБОЦИТОПАТИИ В ПЕРВЫЕ ЧАСЫ ДИСПЕПСИИ У НОВОРОЖДЕННЫХ ТЕЛЯТ | 2006 |
|
RU2323730C1 |
| US 4209254 A, 24.06.1980. | |||

