Предлагаемое изобретение относится к технике вооружения в может быть использовано при создании пусковых установок (ПУ) для переносных ракетных комплексов преимущественно управляемого вооружения.
Известна тренога для легкого автоматического оружия и ПУ под управляемые ракеты (см. патент ФРГ №1553985 от 25.04.1967 г.), принятая за аналог. Указанная тренога, в частности, использована в составе известного противотанкового ракетного комплекса (ПТРК) средней дальности стрельбы (до 2000 м) "Милан", в т.ч. и его некоторых модификаций. Тренога содержит подставку с тремя складными ножками, механизмы пуска и наведения ракеты, пусковую трубу, ручные приводы вертикального и горизонтального наведения.
В указанной треноге при варианте стрельбы из положения оператора "лежа", в связи с относительно короткими ножками, линия визирования цели и выстрела расположена близко к грунту огневой позиции и может создавать при выстреле пылевое (снеговое, песчаное) облако, резко снижающее видимость цели и ракеты в момент выстрела и полета, что является отрицательным показателем надежности применения оружия по линии системы наведения.
Кроме того, тренога не имеет средств защиты основных элементов конструкции от механических повреждений в случае ее несанкционированного падения с высоты при служебном обращении, а также при погрузке через малоразмерные люки в бронетехнику.
Известен ПТРК "ТОУ" с повышенной дальностью стрельбы (см. журнал "Техника и вооружение №1, 1983 г., стр.36 и 37), принятый за прототип. Комплекс (в т.ч. и его некоторые модификации) включает ракету в контейнере, которая при заряжании присоединяется к пусковой трубе установки, съемно-возимую треногу с установленными на ней прибором визирования цели и наведения ракеты, а также тепловизионным прицелом и приводы ручного наведения ракеты.
К недостатку указанного технического решения прототипа относится то, что транспортирование треноги в условиях эксплуатации предусмотрено отдельно от ПУ комплекса. Это требует наличия отдельной упаковки и определенного времени на выполнение операций по отстыковке-пристыковке треноги, а также укладке-изъятию ее из упаковки. Хранение же самой упаковки создает дополнительные трудности в процессе эксплуатации комплекса. Кроме того, тренога не имеет защитных устройств от повреждений ответственных элементов ПУ в процессе боевой эксплуатации комплекса.
Задачей предлагаемого изобретения является создание универсальной ПУ для ракет с расширенными тактическими возможностями и повышение надежности устройства при различных условиях эксплуатации, в т.ч. и транспортирования всеми видами транспорта на дальние расстояния со ступенчатого штыря, жестко закрепленного в вертлюге через ступенчатую втулку с зубьями на нижнем торце буртика и ступицу зубчатого колеса и поворотной гайки с продольными шлицами на наружной цилиндрической поверхности с ограниченным продольным перемещением, которая по шлицам концентрично соединена с кольцевой обоймой, имеющей ответные продольные шлицы на внутренней цилиндрической поверхности, причем к наружной цилиндрической поверхности кольцевой обоймы жестко закреплен рычаг, в котором выполнен сквозной продольный паз, при этом концентрично кольцевой обойме, вокруг ее наружной цилиндрической поверхности, размещена пружина кручения, взаимодействующая одним концом со сквозным продольным пазом, выполненным в рычаге, а второй конец пружины кручения взаимодействует с Г-образным зацепом, выполненным на одной из проушин основания треножного станка, кроме того, во внутренней втулке основания треножного станка выполнено сквозное отверстие с диаметром, равным диаметру штыря вертлюга с обеспечением посадки движения, а внутренняя втулка в верхней части выполнена с удлинением в виде цилиндрического пояска, на верхнем торце которого выполнены зубья, взаимодействующие с ответными зубьями, выполненными на нижнем торце буртика ступенчатой втулки вертлюга, а на внешней цилиндрической поверхности пояска выполнена резьба, взаимодействующая с ответной резьбой, выполненной на внутренней цилиндрической поверхности поворотной гайки, а шаг резьбы в поворотной гайке и глубина зубчатого зацепления на торцевых поверхностях в паре ступенчатая втулка вертлюга - цилиндрический поясок внутренней втулки основания треножного станка связаны между собою с обеспечением возможности полного расцепления указанных торцевых зубьев при повороте выступающей П-образной скобы, жестко закрепленной своими концами к опоре и параллельной ей, размещенной по высоте зеркально на уровне прибора визирования цели и наведения ракеты и в створе с ним со стороны объектива при сложенной передней опоре вверх сошником, а по внутреннему обводу скоба выполнена не менее габаритных размеров корпуса прибора визирования цели и наведения ракеты со стороны объектива, другое ограждение выполнено преимущественно на левой задней опоре треножного станка в виде изогнутой, внешне выступающей скобы по форме внутреннего обвода и с размерами не менее размеров корпуса прибора визирования цели и наведения ракеты со стороны окуляра, третье ограждение выполнено в виде дугообразной скобы, жестко закрепленной своими концами между задними проушинами основания треножного станка со стороны устройства горизонтального наведения и параллельно горизонтальной плоскости треножного станка, причем все ограждения выполнены с зазором от смежных узлов при нулевом положении прибора визирования цели и наведения ракеты по углам наведения, устройство сопряжения треножного станка с вертлюгом выполнено в виде выступающего вниз от вертлюга пустотелого ступенчатого штыря, жестко закрепленного в вертлюге через ступенчатую втулку с зубьями на нижнем торце буртика и ступицу зубчатого колеса и поворотной гайки с продольными шлицами на наружной цилиндрической поверхности с ограниченным продольным перемещением, которая по шлицам концентрично соединена с кольцевой обоймой, имеющей ответные продольные шлицы на внутренней цилиндрической поверхности, причем к наружной цилиндрической поверхности кольцевой обоймы жестко закреплен рычаг, в котором выполнен сквозной продольный паз, при этом концентрично кольцевой обойме, вокруг ее наружной цилиндрической поверхности размещена пружина кручения, взаимодействующая одним концом со сквозным продольным пазом, выполненным в рычаге, а второй конец пружины кручения взаимодействует с Г-образным зацепом, выполненным на одной из проушин основания треножного станка, кроме того, во внутренней втулке основания треножного станка выполнено сквозное отверстие с диаметром, равным диаметру штыря вертлюга с обеспечением посадки движения, а внутренняя втулка в верхней части выполнена с удлинением в виде цилиндрического пояска, на верхнем торце которого выполнены зубья, взаимодействующие с ответными зубьями, выполненными на нижнем торце буртика ступенчатой втулки вертлюга, а на внешней цилиндрической поверхности пояска выполнена резьба, взаимодействующая с ответной резьбой, выполненной на внутренней цилиндрической поверхности поворотной гайки, а шаг резьбы в поворотной гайке и глубина зубчатого зацепления на торцевых поверхностях в паре ступенчатая втулка вертлюга - цилиндрический поясок внутренней втулки основания треножного станка связаны между собой с обеспечением возможности полного расцепления указанных торцевых зубьев при повороте рычага с гайкой на угол 50-60°, а в способе приведения в походное положение пусковой установки для ракет, включающем укладку ПУ в упаковку, перед укладкой ПУ в упаковку прибор визирования цели и наведения ракеты переводят в нулевое положение по углам наведения, опоры треножного станка поворачивают в сторону вертлюга до 180° от исходного, фиксируют их во взаимно параллельном положении, закрепляют рукоятками зажима шарниры опор и стягивают опоры у их концов совместно, в пределах упругой деформации, регулируемой эластичной стяжкой.
Предложенное техническое решение обеспечивает сохранение работоспособности ПУ в случае несанкционированного падения ее на грунт и при погрузке в бронетехнику через люки, в т.ч. и малоразмерные. Дополнительной возможностью является обеспечение ускоренного изменения направления стрельбы в горизонтальной плоскости (переброс), а также создание универсальности боевого использования ПУ как при стрельбе с треножного станка, так и без него, с подвижных и стационарных объектов спецтехники, установив вместо треножного станка, по крайней мере, одну или более ответных деталей (стойку) под штырь вертлюга в необходимом месте (местах) объекта, при незначительной затрате времени на отстыковку треножного станка и наоборот.
Предлагаемое изобретение поясняется графическими материалами, где на:
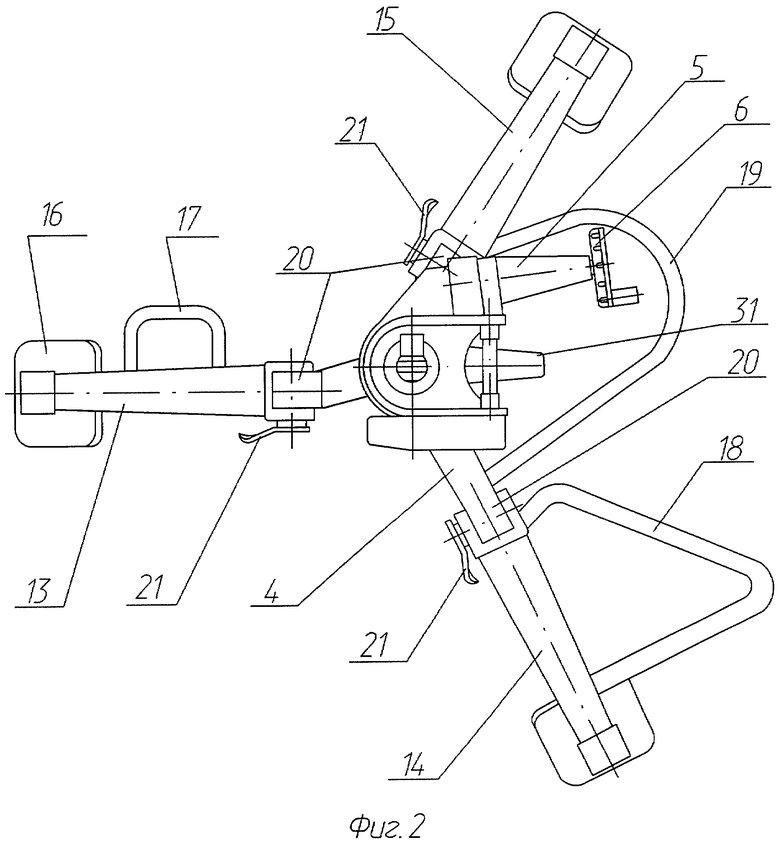
- фиг.1 изображен боковой вид ПУ для ракет в боевом положении;
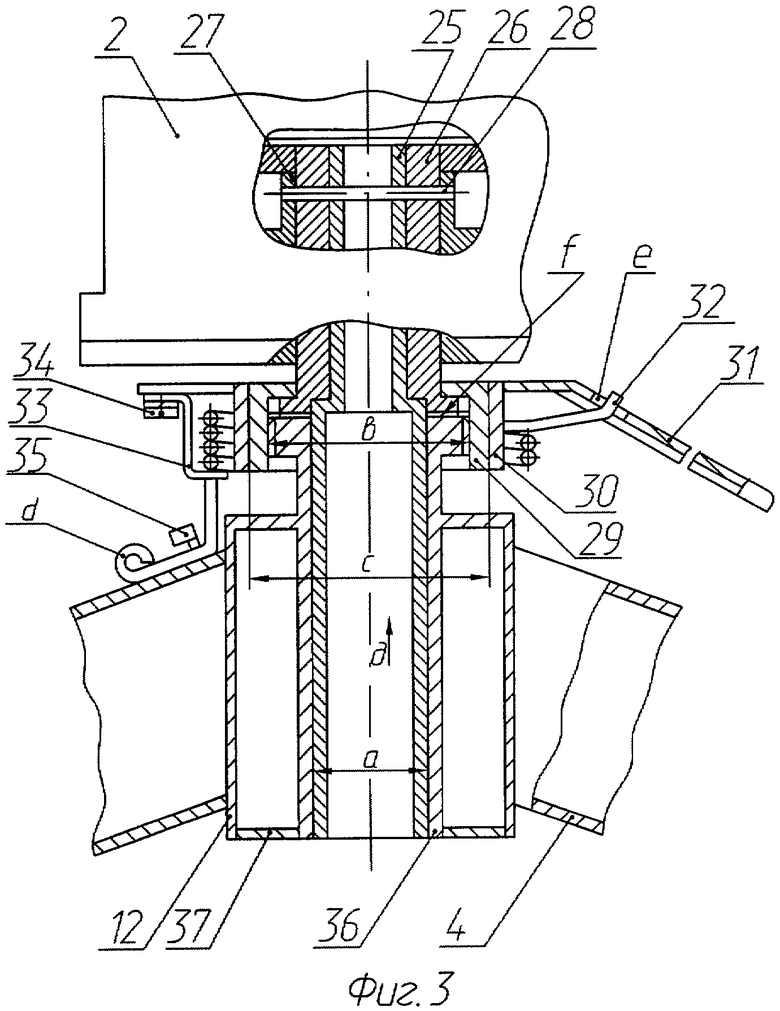
- фиг.2 изображен тревожный станок ПУ для ракет, вид сверху;
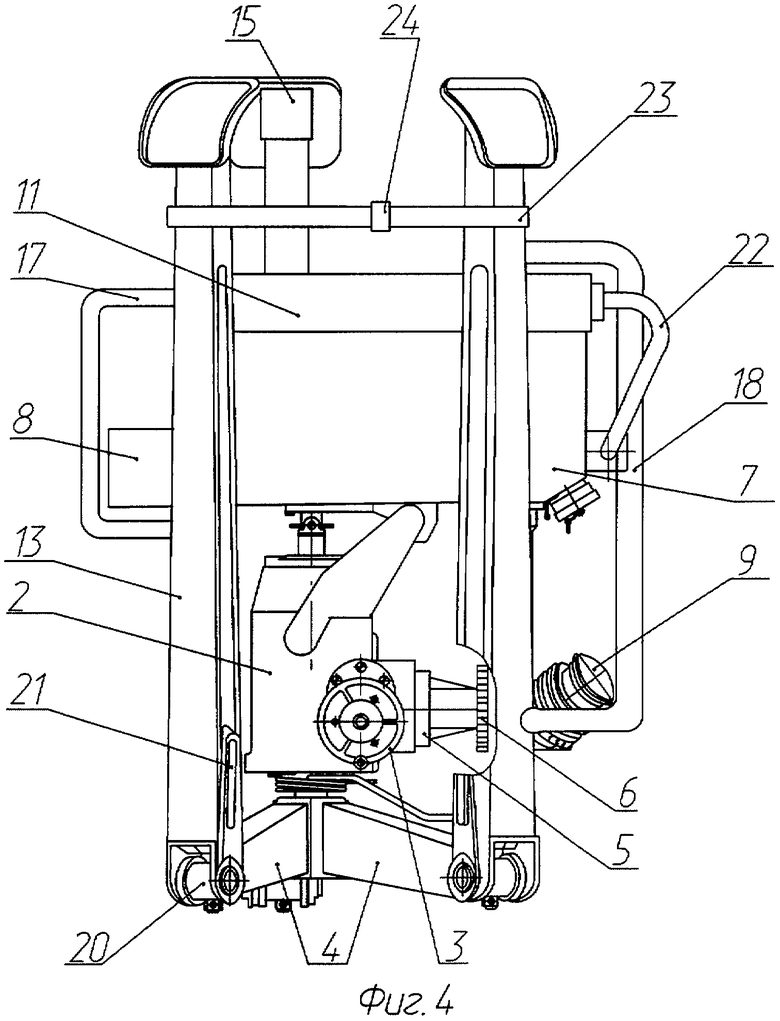
- фиг.3 изображено в разрезе и укрупненно боковой вид устройства соединения вертлюга с треножным станком;
- фиг.4 изображена ПУ для ракет со сложенными опорами для транспортирования (боковой вид).
ПУ для ракет содержит треножный станок 1 (фиг.1), вертлюг 2, оснащенный устройствами вертикального (ВН) 3 и горизонтального (ГН) 5 и 6 наведения (фиг.2). Вертлюг 2 в верхней части сопряжен с прибором визирования цели и наведения ракеты 7, содержащим объектив 8 и окуляр 9. Ракета размещена в контейнере 10, который закреплен в каретке 11, соединенной с прибором визирования цели и наведения ракеты 7.
Треножный станок 1 содержит основание 12, три регулируемые до углу поворота опоры: переднюю 13, левую заднюю 14 и правую заднюю 15. Все три опоры снабжены опорными сожниками 16. На передней опоре 13 выполнено ограждение 17. Левая задняя опора 14 содержит ограждение 18. Между задними проушинами 4 жестко закреплено ограждение 19. Все элементы треноги выполнены преимущественно в штампо-сварном варианте. Каждая из опор 13, 14, 15 соединена с соответствующей проушиной 4 посредством одинаковых шарниров 20, а положение опор 13, 14, 15 в рабочем или транспортном состоянии фиксируется одинаковыми рукоятками их зажима 21. Величина консольного вылета центра отверстия проушин 4 под шарниры 20 принята с учетом габаритных размеров выступающих элементов (в горизонтальной плоскости) верхнего блока, т.е. прибора визирования цели и наведения ракеты 7 с объективом 8 и окуляром 9, вертлюга 2 с устройствами ВН 3 и ГН 5 и 6 и необходимостью перевода в вертикальное положение опор 13, 14, 15 вверх сошниками 16 (походное состояние) практически до их взаимно параллельного положения (от нуля до 180°). Перед укладкой в упаковку опоры 13, 14, 15 стягивают между собой у концов, ближе к сошникам 16, стяжкой 23 (напряжник). В данном техническом решении в качестве стяжки 23 применен тканевый ремень (например по ОСТ 17-667-2002). В качестве альтернативы стяжки 23 возможно использование замкнутого резинового канатика любого профиля сечения с необходимой жесткостью (пружинением). Застежка 24 выполнена в виде пряжки с внутренними зубцами, запирающими ремень при плавной регулировке величины натяжения стяжки 23. Устройство сопряжения треножного станка 1 с вертлюгом 2 (фиг.1) выполнено в виде выступающего вниз от вертлюга 2, удлиненного, пустотелого, ступенчатого штыря 25 (фиг.3), закрепленного жестко в вертлюге 2 через ступенчатую втулку 26 и ступицу зубчатого колеса 27 устройства ГН 5, 6 штифтом 28. Штырь 25 установлен по посадке движения в центральном отверстии по диаметру а, которое выполнено в двойной втулке 36, концентрично соединенной в верхней и нижней частях со второй ее внешней втулкой. Функции нижнего крепления выполняет заглушка 37. Центральная, внутренняя, часть втулки 36 на верхней стороне выполнена удлиненной вверх с цилиндрическим пояском, на поверхности f которого нанесены торцевые зубья, взаимодействующие с ответными зубьями, выполненными на нижнем торце буртика ступенчатой втулки 26, а на цилиндрическом участке пояска по диаметру в образована резьба, взаимодействующая с ответной резьбой, выполненной во внутренней цилиндрической поверхности поворотной гайки 29, причем шаг резьбы и глубина зубчатого зацепления на торцевых поверхностях f взаимосвязаны между собой таким образом, чтобы при повороте рычага 31 на угол 50-60° происходило полное расцепление указанных торцевых зубьев. По внешней цилиндрической поверхности втулки 36 в горизонтальной плоскости жестко закреплены три проушины 4 с необходимым угловым шагом, близким к равномерному. Поворотная гайка 29 соединена с обоймой 30 посредством продольных шлицев по диаметру с. Такое соединение позволяет регулировать при сборке устройства взаимоположение по углу в горизонтальной плоскости поворотной гайки 29, рычага 31 и пружины кручения 32. Последняя поддерживается в рабочем положении скобой 33, закрепленной к рычагу 31 винтами 34. Конец d пружины кручения 32 выполнен в виде кольца для удобства заряжания-разряжания указанной пружины. Второй конец пружины кручения 32 введен в сквозной продольный паз е рычага 31. Последний жестко соединен с обоймой 30. На основании 12 треножного станка 1 выполнен Г-образный зацеп 35, который сопрягается с концом d пружины кручения 32, удерживая ее в "заряженном" состоянии.
Ограждения: переднее 17, левое заднее 18 и боковое 19 выполнены в виде скоб различной конфигурации из тонкостенных трубчатых заготовок, жестко закрепленных на своих местах.
Поскольку функция ограждения 17, 18 и 19 сводится к защите выступающих, ответственных элементов ПУ, свернутой для транспортирования преимущественно без упаковки), в предлагаемом техническом решении они распределены следующим образом: ограждение переднее 17 выполнено на передней опоре 13 в виде П-образной скобы, параллельной самой опоре, с размерами и положением по высоте, обеспечивающими механическую защиту от ударов прибора визирования цели и наведения ракеты 7 со стороны объектива 8, т.е. по габаритам не менее габаритных размеров прибора 7 с передней стороны. Левое заднее ограждение 18 выполнено в виде изогнутой скобы и жестко закреплено своими концами на левой задней опоре 14 на уровне охвата окуляра 9, заднего торца прибора визирования цели и наведения ракеты 7 и кабеля 22 (при сложенной левой задней опоре 14 для транспортирования - фиг.4). Боковое ограждение 19 выполнено в виде дугообразной выступающей скобы, параллельной горизонтальной плоскости ПУ, жестко закрепленной своими концами между проушинами 4 основания 12 и охватывающей бесконтактно устройство ГН 6 (фиг.2).
Работа устройства заключается в изъятии ПУ из упаковки, раскреплении застежки 24 и снятии стяжки 23, переводе опор 13, 14, 15 в боевое положение путем раскрепления в проушинах 4 шарниров 20, ослабив их рукоятками 21, и установке опор 13, 14, 15 под необходимым углом от вертикали применительно к выбранной огневой позиции с последующим закреплением всех трех шарниров 20 рукоятками 21. Далее следует установить контейнер 10 с ракетой и закрепить в каретке 11. Путем поворота рычага 31 на угол 50-60° ослабить крепление вертлюга 2 к треножному станку 1 и развернуть верхний блок узлов (контейнер 10 с ракетой прибор визирования цели и наведения ракеты 7 с кареткой 11 и вертлюгом 2) в сторону стрельбы и отпустить рычаг 31, который под действием пружины 32 вернется в исходное положение. Тонкую наводку на цель оператор (стрелок) осуществляет по ВН и ГН устройствами 3, 5, 6, наблюдая за целью в окуляр 9. Аналогичным образом производится ускоренный перевод (переброс) ПУ при необходимости срочного изменения направления стрельбы в горизонтальной плоскости.
Для отделения верхнего блока узлов (при снятом контейнере 10 с ракетой) от треножного станка 1 необходимо вывести из зацепления конец d пружины кручения 32 с зацепом 35 и вращением рычага 31 отвинтить резьбу на диаметре в, после чего поднять верхний блок в направлении стрелки g, изъяв его вместе со штырем 25 из центрального отверстия диаметром а. Для установки верхнего блока узлов на треножный станок 1 вновь порядок действий выполняется в обратной последовательности относительно изложенного выше. Указанные операции, в частности, выполняют при варианте стрельбы со специально оборудованных боевых объектов (стационарных и подвижных) без использования треножного станка 1, но для этой цели на боевом объекте должна быть установлена специальная стойка (стойки) аналогичной конструкции по пристыковочному месту центральной втулке 36 основания 12 треножного станка 1.
Свертывание ПУ для транспортирования производится в обратной последовательности операций, производимых при развертывании, изложенных выше. Причем установка и натяжение стяжки 23, а также закрепление ее положения застежкой 24 производится в пределах упругой деформации опор 13, 14, 15.
Как уже отмечено выше в критике недостатков аналога и прототипа (ракетные комплексы "Милан" и "ТОУ") в части эксплуатационных характеристик, в частности относительно их треножных станков (треног), в предлагаемом техническом решении по созданию ПУ для ракет и способу ее приведения в походное положение принят принципиально иной подход по решению поставленной задачи.
Так, при создании ПУ для ракет, например, противотанковых и, в частности, повышенной дальности стрельбы (3 км и более) в некоторых случаях выдвигаются требования разработки треножных станков с удлиненными опорами для обеспечения определенного режима стрельбы не только из положения оператора "лежа", но и с "колена", а то и выше, или же специального поднятия линии визирования цели и выстрела, с учетом местности театра военных действий и подстилающей поверхности у огневой позиции, в т.ч. и нарушение прозрачности атмосферы при выстреле от воздействия пыли, снега, песка и т.п., или же наличия мелколесья, высокого травостоя и др. Однако ПУ с удлиненными опорами, сложенными для транспортирования в соответствии с предлагаемым техническим решением, размещенная в единую упаковку (в т.ч. и без нее), имеет свой недостаток в части транспортирования. Например, установлено, что при испытаниях на имитацию транспортирования на длительные расстояния в соответствии с требованиями ТТЗ и межведомственными нормалями и ГОСТами (железнодорожный, автомобильный, гусеничный, воздушный и морской транспорты), без использования стяжки 23, на отдельных частотах и перегрузках возникают явления резонансов на консольно закрепленных опорах треножного станка 1 с передачей резонансных явлений на механизмы наведения (ВН и ГН), что приводит к несанкционированному развороту треножного станка 1 относительно вертлюга 2, а также передаче повышенного вибровозмущения на ответственные узлы прибора визирования цели и наведения ракеты 7, а также другие ответственные устройства ПУ. При этом происходит нарушение положения ПУ в упаковке, что влияет на показатель надежности ПУ в процессе эксплуатации.
В предлагаемом техническом решении, помимо конструктивных мер, для устранения явления резонанса предлагается применить способ стягивания всех сложенных для транспортирования опор по их концам, ближе к сошникам 16, регулируемой по натяжению стяжкой 23, оснащенной застежкой 24. Стягивание производится в пределах упругой деформации опор 13, 14, 15 и не требует особой тарировки процесса. Диссипативные силы, возникающие в материале стяжки, эффективно гасят колебания опор и тем самым устраняют явление резонанса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ОРУЖИЯ | 2004 |
|
RU2265784C1 |
| ПЕРЕНОСНОЙ ПРОТИВОТАНКОВЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2244893C1 |
| ПЕРЕНОСНОЙ ПРОТИВОТАНКОВЫЙ КОМПЛЕКС | 1997 |
|
RU2125699C1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| ТРЕНОЖНЫЙ СТАНОК АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2001 |
|
RU2206038C2 |
| ТРЕНОЖНЫЙ СТАНОК АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2002 |
|
RU2206039C1 |
| СТАНОК АВТОМАТИЧЕСКОГО ГРАНАТОМЕТА | 2003 |
|
RU2241944C1 |
| АВТОМАТИЧЕСКИЙ ГРАНАТОМЕТНЫЙ КОМПЛЕКС | 2001 |
|
RU2202090C2 |
| Тренажер для подготовки операторов управляемого вооружения | 2014 |
|
RU2607428C2 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
Изобретение относится к технике вооружения и может быть использовано при создании пусковых установок (ПУ) для переносных ракетных комплексов. В ПУ основание треножного станка выполнено в виде двух концентрично соединенных между собой по торцам втулок с тремя продольными проушинами, жестко закрепленными на наружной поверхности внешней втулки, с угловым шагом, близким к равномерному. Конец каждой из проушин снабжен шарнирным устройством с рукояткой его зажима. К шарниру присоединена опора с возможностью регулировки и фиксации ее углового положения в любом промежуточном и крайних положениях от нуля до 180°. Треножный станок снабжен тремя скобами ограждения. Расстояние от центра треножного станка до центра каждого из шарниров в проушинах выполнено равным не менее 1/2 диаметра вертлюга с обеспечением возможности перевода опор вверх сошниками до положения, близкого к взаимно параллельному при нулевом положении по углам наведения прибора визирования цели и наведения ракеты. В способе приведения в походное положение ПУ прибор визирования цели и наведения ракеты переводят в нулевое положение по углам наведения, опоры треножного станка поворачивают в сторону вертлюга до 180° от исходного, фиксируют их во взаимно параллельном положении, закрепляют рукоятками зажима шарниры опор и стягивают опоры у их концов совместно в пределах упругой деформации, регулируемой эластичной стяжкой. Изобретение позволяют повысить надежность ПУ. 2 н. и 3 з.п. ф-лы, 4 ил.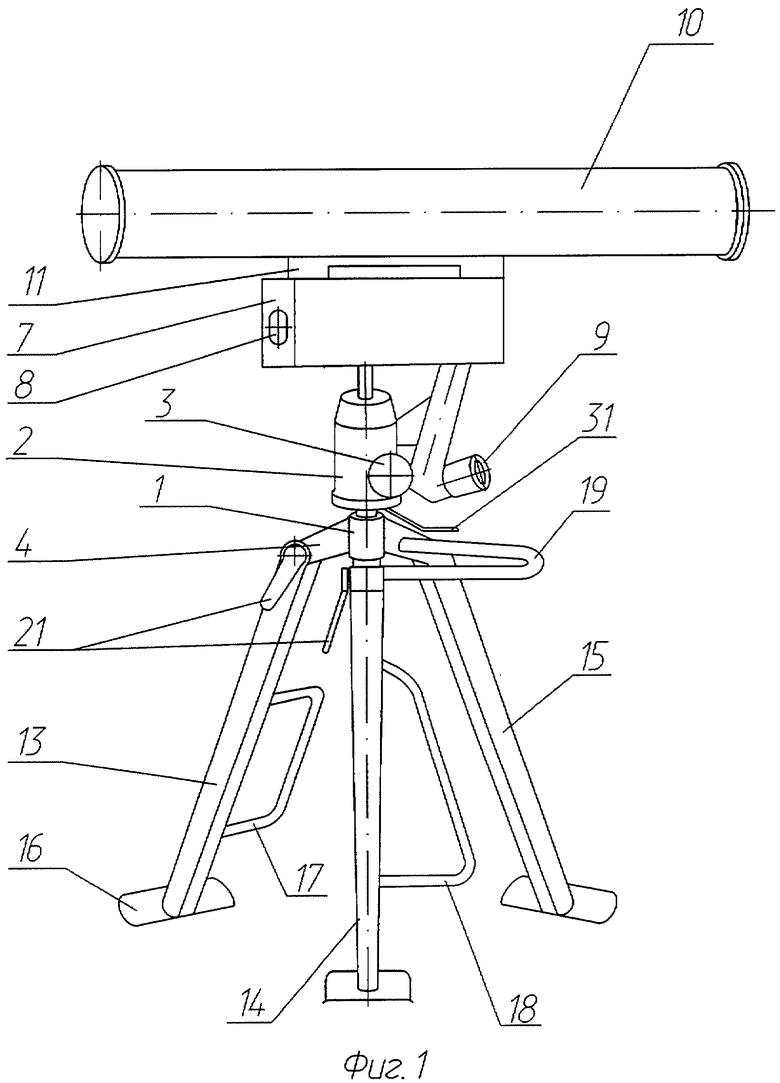
| Ж-л "Техника и вооружение", 1983, № 1, с.36, 37 | |||
| АВТОМАТИЧЕСКИЙ ГРАНАТОМЕТНЫЙ КОМПЛЕКС | 2001 |
|
RU2202090C2 |
| US 3960052 A, 01.06.1976 | |||
| US 4010688 A, 08.03.1977. | |||

