Изобретение относится к области обработки изображений и может быть использовано для формирования фотореалистичных изображений при любых расстояниях от объекта съемки до съемочной камеры, а также при любых погрешностях, вносимых объективами при формировании изображений.
Наиболее близким к предложенному изобретению является способ корректировки изображений (Патент США № 6278491 от 21.08.2001), в котором определяют визуально значимую часть изображения и корректируют ее, приводя в соответствие с визуально воспринимаемым образом исходного объекта.
Недостатком известного способа является ограниченность возможностей его применения, так как корректировка изображения осуществляется только в отношении цвета, а именно, зрачков глаз объекта и трансформации геометрических размеров изображения не происходит.
Вместе с тем одной из важнейших задач системы зрительного восприятия является переработка восприятия геометрических соотношений сформированного на сетчатке образа. Система зрительного восприятия человека приближает формы созерцаемых предметов к истинным при условии, что эти формы предметов знакомы смотрящему. При анализе изображений, полученных путем фотографирования, несмотря на соответствие изображения на фотографии и изображения, в аналогичных условиях, сформированного на сетчатке, корректировка изображения не происходит и изображение воспринимается как искаженное. Указанная особенность зрительного восприятия обусловлена тем, что при анализе фотографических изображений отсутствует стереоскопическое (бинокулярное) восприятие объекта.
До настоящего времени задача автоматизированной обработки изображений, обеспечивающих реалистичное представление объектов не только не решалась, но и не ставилась, так в случае использования для формирования изображений химических процессов дальнейшая трансформация исходного изображения затруднена, а наибольший эффект от использования предложенного способа достигается при обработке изображений, хранящихся в цифровом виде.
Предложенное изобретение решает задачу формирования изображений, полностью соответствующих восприятию окружающего пространства человеком.
Техническим результатом, достигаемым при использовании настоящего изобретения, является повышение качества изображений путем формирования фотореалистичных изображений объектов с одновременной возможностью коррекции нелинейных искажений, вносимых объективами, выполненными с низким качеством, а также используемыми в нештатном режиме, например при съемке удаленных объектов короткофокусными объективами.
Указанный технический результат достигается за счет того, что в способе формирования матричного изображения объекта с помощью объектива проецируют исходное оптическое изображение объекта на блок светочувствительных элементов, каждый из которых выполнен формирующим информацию об усредненной яркости, по крайней мере, одной цветовой составляющей участка исходного оптического изображения, соответствующего участку объекта, изображение которого формируется на соответствующем светочувствительном элементе, и формируют исходное матричное изображение объекта, каждый элемент матрицы которого отображает информацию о положении и усредненной яркости, по крайней мере, одной цветовой составляющей соответствующего участка исходного оптического изображения объекта, значение которой соответствует сформированной соответствующим светочувствительным элементом информации; по крайней мере, для части элементов исходного матричного изображения определяют расстояние, однозначно соответствующее расстоянию от объектива до участка объекта, соответствующего соответствующему элементу исходного матричного изображения; и формируют окончательное матричное изображение объекта, такое, что характеристика взаимного положения элементов окончательного матричного изображения максимально точно соответствует измененному, в соответствии с заданным масштабом, взаимному положению аксонометрических проекций соответствующих элементам окончательного матричного изображения видимых со стороны объектива участков объекта на перпендикулярную линии проецирования плоскость проецирования вдоль параллельных линий проецирования, по крайней мере, одна из которых проходит через видимую через объектив часть объекта и пересекает внешнюю поверхность внешней наиболее удаленной от блока светочувствительных элементов линзы объектива, а каждый элемент окончательного матричного изображения отображает информацию об усредненной яркости цветовой составляющей соответствующего элементу окончательного матричного изображения участка объекта, определенной в соответствии с информацией об усредненной яркости цветовой составляющей, по крайней мере, одного элемента исходного матричного изображения, по крайней мере, частично соответствующего участку объекта, соответствующему элементу окончательного матричного изображения.
В частном случае реализации способа в качестве светочувствительных элементов используют приборы с зарядовой связью.
В частном случае реализации способа в качестве светочувствительных элементов используют кристаллы галогенида серебра.
В частном случае реализации способа в качестве блока светочувствительных элементов используют несколько матриц светочувствительных элементов, на каждой из которых фокусируется исходное оптическое изображение, прошедшее через светоделительное приспособление, а каждый элемент матрицы исходного матричного изображения отображает информацию об усредненной яркости отдельных цветовых составляющих, сформированную светочувствительными элементами всех матриц для соответствующих друг другу участков изображения.
В частном случае реализации способа, в качестве блока светочувствительных элементов используют нанесенные на плоскую непрозрачную деформируемую подложку светочувствительные зерна, обеспечивающие формирование исходного матричного изображения путем изменения отражательной способности соответствующей зерну части подложки, по крайней мере, на часть глубины подложки, в соответствии с усредненной яркостью соответствующего зерну участка исходного изображения, и формируют скорректированное изображение путем деформации подложки в плоскости до обеспечения взаимного расположения участков подложки, для которых было определено расстояние, в максимально точном соответствии с измененным в соответствии с заданным масштабом взаимным положением аксонометрических проекций соответствующих элементам окончательного матричного изображения видимых со стороны объектива участков объекта на перпендикулярную линии проецирования плоскость проецирования вдоль параллельных линий проецирования, по крайней мере, одна из которых проходит через видимую часть объекта и пересекает внешнюю поверхность внешней, наиболее удаленной от блока светочувствительных элементов, линзы объектива.
В частном случае реализации способа расстояния определяют путем сканирования объекта лазерным дальномером.
В частном случае реализации способа расстояния определяют ультразвуковым сканированием объекта.
В частном случае реализации способа расстояния определяют по размытию изображения при смещении объектива в плоскости, перпендикулярной главной оптической оси объектива.
В частном случае реализации способа изменяют фокусировку объектива и, для нескольких режимов фокусировки объектива, формируют исходные оптические изображения объекта, для каждого из исходных оптических изображений объекта определяют находящиеся в фокусе участки оптического изображения объекта, для которых, в соответствии с режимом фокусировки объектива, определяют расстояние от соответствующих участков объекта до объектива, задают допустимую глубину резкости и, для каждого из исходных оптических изображений, формируют окончательное матричное изображение участков исходного оптического изображения, соответствующих заданной глубине резкости с одинаковым для всех окончательных матричных изображений коэффициентом масштабирования, и формируют полное изображение объекта путем объединения при совмещении краев окончательных матричных изображений.
В частном случае реализации способа, в качестве объекта используют часть съемочной композиции, изображение которой проецируется на блок светочувствительных элементов вместе с изображением объекта, и формируют полное матричное изображение съемочной композиции, выполненное путем совмещения неизменного матричного изображения, промежуточного матричного изображения и окончательного матричного изображения, по крайней мере, часть краев неизменного матричного изображения совмещена с краями промежуточного матричного изображения, по крайней мере, часть краев которого совмещена с краями окончательного матричного изображения, причем неизменное матричное изображение представляет собой измененную, в соответствии с заранее заданным масштабом, часть изображения, спроецированного на блок светочувствительных элементов, а промежуточное матричное изображение представляет собой часть исходного изображения, трансформированную с обеспечением совпадения смежных краев матричных изображений, а расположенные между краями элементы промежуточного матричного изображения отображают информацию об усредненной яркости цветовой составляющей участков спроецированного на блок светочувствительных элементов изображения съемочной композиции, смещение которых относительно соответствующих элементов промежуточного матричного изображения возрастает в направлении от края неизменного матричного изображения к краю окончательного матричного изображения.
Кроме того, в частном случае реализации способа последовательно формируют несколько исходных оптических изображений объекта и для каждого из исходных оптических изображений, формируют окончательное матричное изображение.
Кроме того, в частном случае реализации способа на исходном оптическом изображении распознают изображение функционально объединенной части, которую используют в качестве объекта.
Возможность и варианты реализации способа поясняются чертежами.
На фиг.1 изображен вариант устройства, предназначенного для реализации способа, состоящий из блока (матрицы) светочувствительных элементов 1, объектива 2 и дальномера 3. На фиг.1 схематически изображены объект съемки 4 и ход лучей 5.
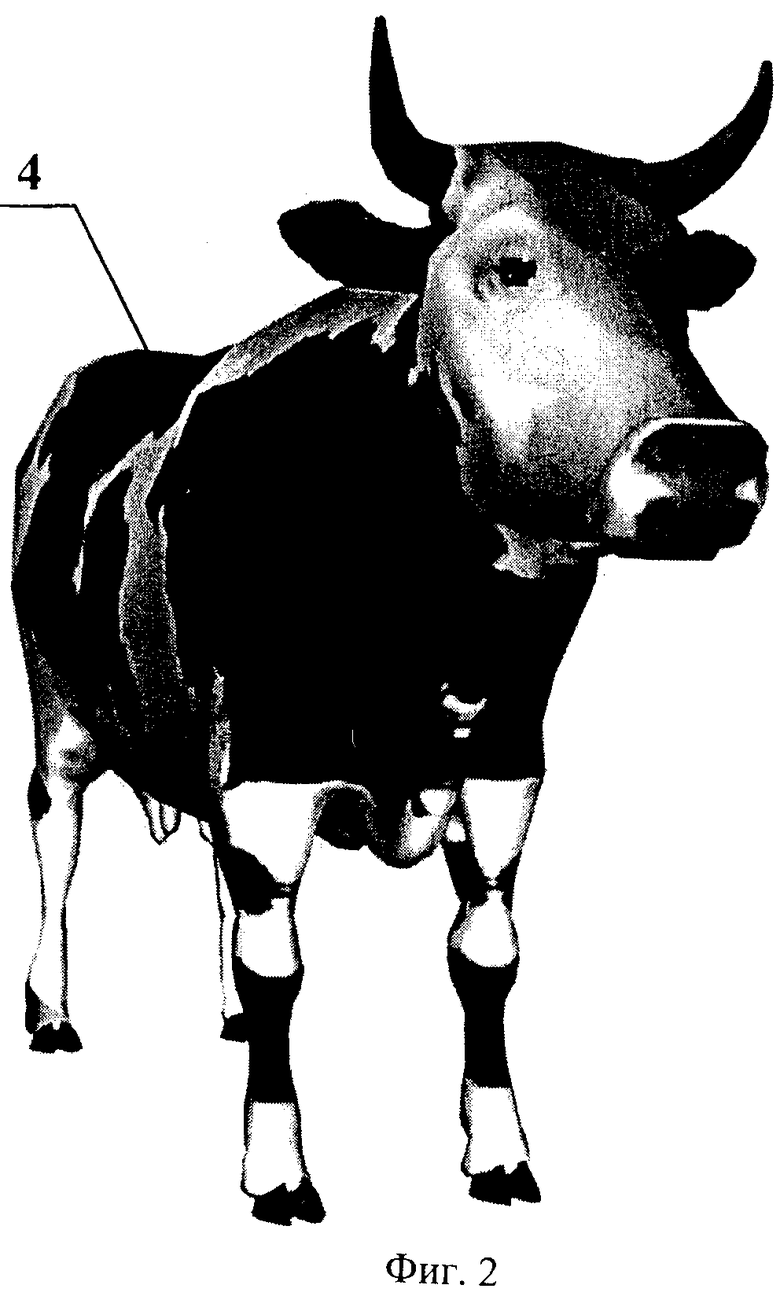
На фиг.2 представлено стилизованное исходное изображение объекта 4, полученное съемкой с использованием короткофокусного объектива с расстояния 3-5 м.
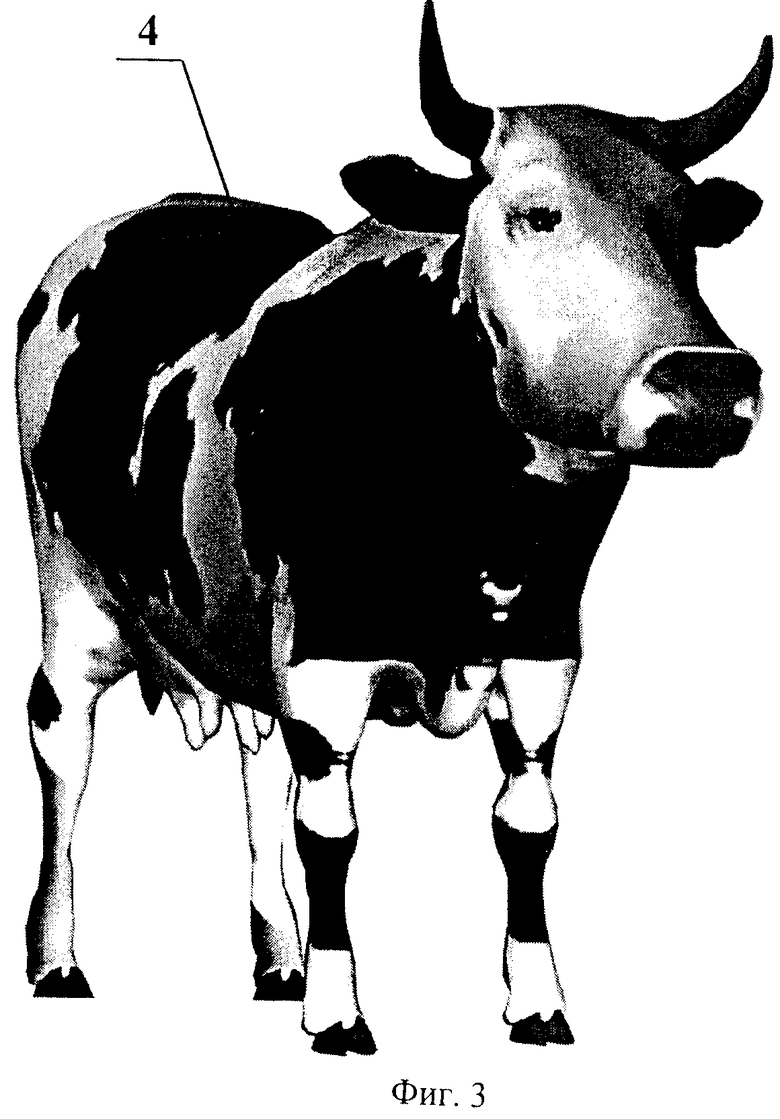
На фиг.3 представлено изображение объекта 4, полученное после обработки исходного изображения в соответствии с предложенным способом.
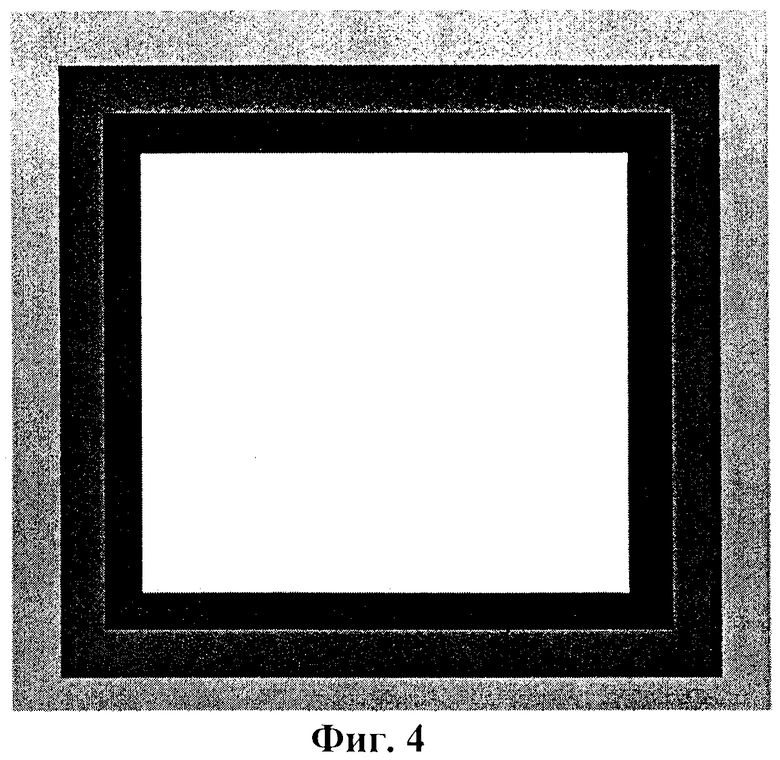
На фиг.4 представлено изображение исходного объекта, в которой яркость точек описывается двумя разрядами квантования и для каждой из ячеек, расположение которых соответствует расположению на исходной матрице, заданы координаты положения ячеек на аксонометрической проекции поверхности объекта.
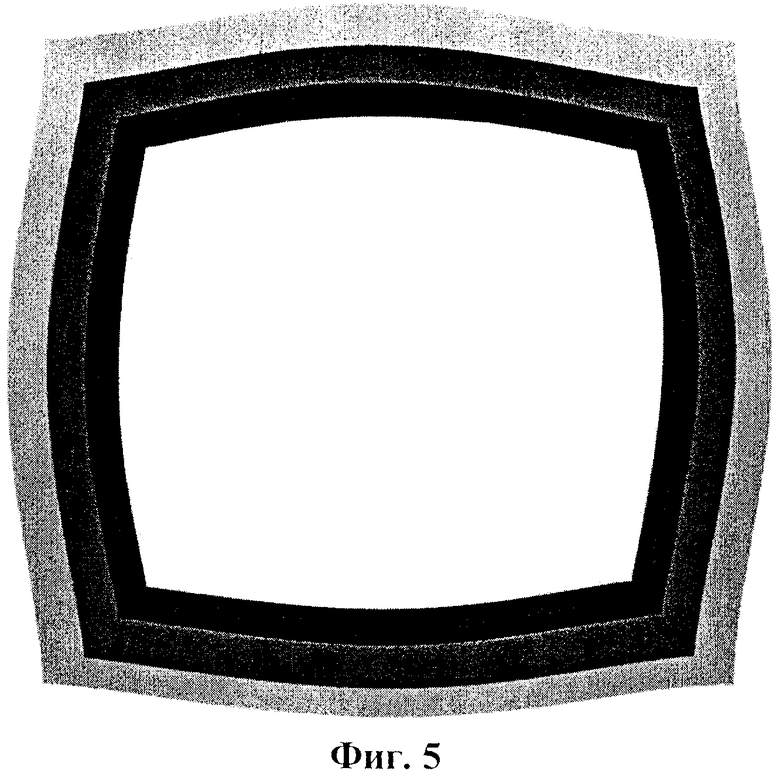
На фиг.5 представлена трансформированная матрица, в которой положение ячеек соответствует положению точек аксонометрической проекции, а незаполненные элементы заполнены цветами, соответствующими цветам расположенных рядом элементов.
На фиг.6 представлено трансформированное изображение объекта, в котором расположение ячеек соответствует стандартному и регулярному расположению ячеек изображения исходного изображения.
Способ реализуется следующим образом:
Первоначально, с помощью съемочной камеры (фотоаппарата), состоящей из блока (матрицы) светочувствительных элементов 1, объектива 2 и дальномера 3, формируют исходное изображение и одновременно определяют расстояния от участков видимой части объекта до объектива 2 съемочной камеры. В случае получения изображений статических объектов операции формирования изображения и определения расстояний могут быть разнесены во времени.
Определение расстояний может быть осуществлено с использованием дальномера 3, например лазерного или ультразвукового сканера, и при существенном расстоянии от объектива до сканера в показания сканера вводится поправка на параллакс.
Указанные выше примеры не исчерпывают все возможные приемы, используемые для определения расстояний. Так, например, определение расположения точек объекта может осуществляться путем получения стереоизображений традиционным способом и использования для последующих трансформаций одного из изображений. В частных случаях, необходимая стереобаза может быть получена путем формирования нескольких изображений при смещении фотоаппарата фокальной плоскости или при формировании изображения в процессе смещения фотоаппарата. В последнем случае степень размытия участков изображения будет соответствовать расстоянию соответствующих участков объекта до объектива.
Кроме того, при последовательном изменении положения фокальной плоскости объектива и получении изображений с достаточно большим относительным отверстием (диафрагмой) объектива (при малых значениях диафрагменных чисел) расстояние может быть определено путем распознавания частей изображения, представляющих участки объекта с достаточной резкостью (находящихся в фокусе). В дальнейшем, на полученных изображениях выделяются участки, имеющие достаточную резкость, которые могут быть объединены с целью получения целостного изображения. Использование современных быстродействующих приводов объектива позволяет измерять расстояния с достаточной скоростью до момента формирования конечного кадра.
В дальнейшем, по результатам определения расстояний формируется таблица расстояний, каждое их которых соответствует определенной точке изображения. При использовании цифровой техники для формирования изображения биты цветности каждого или заранее заданных пикселей могут дополняться битами расстояния соответствующих пикселям участков объекта.
На следующем этапе, на основании полученного изображения и измеренных расстояний формируется аксонометрическая проекция объекта, необходимая для формирования окончательного изображения.
При формировании аксонометрического изображения в случае идеального объектива, представленного, например, в виде небольшого отверстия (апертуры), дисторсионные искажения, вносимые объективом, незначительны и могут не приниматься во внимание.
В этом случае, в пределах погрешности измерения расстояний, информация о масштабировании изображения при съемке и измеренных расстояниях дает однозначное представление о положении точек объекта в полярной системе пространственных координат, где в качестве одной из осей, наиболее целесообразно задать главную оптическую ось объектива или прямую, проходящую перпендикулярно матрице через центра объектива. При этом следует отметить, что понятие прямой для целей пояснения операций реализации способа достаточно условно, так как при использовании призм, входящих в состав оптической системы фотоаппарата или в состав цветоделительных приспособлений, линия, проходящая через матрицу и центр объектива, будет прямой только с точки зрения наблюдателя, находящегося с внешней стороны объектива.
В качестве второй оси отсчета углов в полярной системе координат наиболее целесообразно выбрать любую из осей, перпендикулярную главной оптической оси объектива и проходящую через внешнюю линзу объектива, от которой отсчитывается расстояние. Дополнительно, при использовании разнесенных в пространстве датчика расстояний и объектива могут быть введены поправки на параллакс.
Вся перечисленная информация дает однозначное представление о пространственном расположении точек объекта в полярной системе координат.
При определении расположения точек изображения объекта в аксонометрической проекции выбирается ось проецирования, которая не обязательно должна совпадать с главной оптической осью объектива и, путем перехода от полярной к декартовой (ортогональной) системе координат, формируются сведения об аксонометрической проекции. После или в процессе преобразования координат объекта из полярной в Декартову систему координат, сведения об одной из координат характеризующей глубину (или расстояние точек объекта до плоскости проецирования), исключается, так как она не содержит информацию, необходимую для реализации способа. Следует отметить, что прядок получения и обработки изображения не существенен с точки зрения достижения технического результата, так как, например, дальномерное устройство может быть дополнено устройством коррекции положения точки с учетом углов полярной системе координат и одновременного задания цветности точек по результатам формирования исходного изображения. Либо пространственное положение точек на аксонометрической проекции определяется непосредственно путем сканирования объекта несколькими параллельными лучами лазера, что целесообразно, например, при макросъемке объектов. В последнем случае расположение точек будет определено непосредственно в декартовой системе координат.
Ось проецирования должна проходить через объектив, так как в этом случае будет обеспечиваться формирование наиболее полного изображения объекта, представленного с виде аксонометрической проекции.
Полученная информация о взаимном расположении точек объекта в дальнейшем используется для трансформации изображения таким образом, чтобы взаимное расположение точек объекта на аксонометрической проекции изображения полностью соответствовало взаимному изображению соответствующих точек на матричном изображении. Для осуществления трансформации задается масштаб или коэффициент масштабирования, в соответствии с которым определяется положение точек на промежуточном изображении. Указанный коэффициент масштабирования, необходимый в связи с тем, что расстояния между точками объекта на матричном изображении не равны расстояниям между точками аксонометрической проекции изображения объекта, целесообразно выбирать приближенно равным масштабу изображения наиболее композиционно значимой части объекта, например равным отношению расстояния между зрачками человека к расстоянию между зрачками на исходном изображении.
В дальнейшем осуществляется трансформация изображения с учетом определенных координат точек на аксонометрической проекции и заданного коэффициента масштабирования.
В случае, если формат представления окончательного матричного изображения обеспечивает возможность задания положения элементов матрицы, и их размеров, например при использовании растяжимой подложки, положение точек подложки приводится в соответствие с заданными для указанных точек координатами, после чего окончательное матричное изображение объекта считается сформированным. При этом происходит трансформация размеров и положения не только тех точек, для которых были заданы координаты, но и промежуточных точек, в соответствии со свойствами эластичной подложки.
В случае, если формат окончательного матричного изображения требует заранее определенного задания положения и размеров элементов матрицы, например, цифровой формат представления изображения в виде пикселей, после показанной выше трансформации изображения, свойства элементов окончательного матричного изображения определяются на основании свойств элементов трансформированного изображения таким образом, чтобы окончательное и трансформированное изображения с максимально возможной точностью соответствовали друг другу.
Указанное соответствие достигается, например, тем, что для каждого из элементов окончательного матричного изображения яркость элемента определяется путем усреднения яркости элементов трансформированного изображения, участки которых находятся в пределах соответствующего элемента окончательного матричного изображения.
В простейшем случае, после трансформации эластичной подложки производится копирование изображения, образованного на эластичной подложке, на матричный носитель информации, например, на фотобумагу, матричное изображение на которой формируется за счет использования светочувствительных зерен галогенидов серебра.
В ряде случаев, например при фотографировании композиций, содержащих дороги, рельсовые полотна, и объектов, находящихся на значительном расстоянии друг от друга, нецелесообразно осуществлять трансформацию всей композиции. Кроме того, для удаленных на расстояние более 10 метров от объектива элементов съемочной композиции коррекция перспективы, как правило, не требуется, так как объекты простой формы в этом случае получаются с незначительными перспективными искажениями, а протяженные объекты изображаются в достаточной степени достоверно и в соответствии с особенностями визуального восприятия. В этом случае на композиции может быть выделен функционально самостоятельный объект, например автомобиль или здание, и трансформацию композиции осуществляют только для указанного объекта и прилегающего к нему изображения. Возможность распознавания на изображении функционально самостоятельного объекта раскрыта, например, в патенте США №6728401 от 27.04.2004 и не является предметом настоящего изобретения.
Также, в ряде случаев, можно и нужно трансформировать изображение композиции частично, так как не всегда сформированное на матрице светочувствительных элементов изображение дает полную информацию о цвете (яркости отдельных цветовых составляющих) точек объекта, которые должны быть отражены на аксонометрической проекции.
В этом случае на исходном изображении задают объект, подлежащий трансформации, а также неизменную и промежуточную части, после чего формируют полное матричное изображение съемочной композиции, выполненное путем совмещения неизменного матричного изображения, промежуточного матричного изображения и окончательного матричного изображения, где, по крайней мере, часть краев неизменного матричного изображения совмещена с краями промежуточного матричного изображения, по крайней мере, часть краев которого совмещена с краями окончательного матричного изображения, причем неизменное матричное изображение представляет собой измененную, в соответствии с заранее заданным масштабом часть изображения, спроецированного на блок светочувствительных элементов, а промежуточное матричное изображение представляет собой часть исходного изображения, трансформированную с обеспечением совпадения смежных краев матричных изображений, а расположенные между краями элементы промежуточного матричного изображения отображают информацию об усредненной яркости цветовой составляющей участков спроецированного на блок (матрицу) светочувствительных элементов изображения съемочной композиции, смещение которых относительно соответствующих элементов промежуточного матричного изображения возрастает в направлении от края неизменного матричного изображения к краю окончательного матричного изображения.
Для создания целостной картины съемочной композиции целесообразно корректировать объекты, расположенные на расстоянии менее 8 метров от объектива, сохранять неизменным изображение объектов, удаленных на расстояние более 10 метров, и формировать промежуточную часть изображения для создания целостной картины съемочной композиции.
При использовании эластичной подложки для формирования комбинированного изображения неподвижно закрепляют часть подложки, соответствующую неизменной части композиции, осуществляют трансформацию изображения объекта с использованием указанных выше операций, в результате чего происходит трансформация промежуточной части композиции, после чего полученное изображение используют либо самостоятельно либо преобразуют к требуемому виду с использованием раскрытых выше операций.
Предложенный способ может быть использован не только в фотографии, но и для формирования телевизионного изображения, состоящего их нескольких последовательно снятых кадров. В этом случае скорректированное изображение формируется для каждого из кадров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ создания цифрового топографического фотодокумента и комплексное средство для осуществления этого способа | 2017 |
|
RU2665250C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГОЛОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ РИСУНКА | 2012 |
|
RU2511035C1 |
| Видеоэндоскоп | 2016 |
|
RU2622032C1 |
| УСТРОЙСТВО ОБЪЕДИНЕНИЯ ИЗОБРАЖЕНИЙ В ЕДИНУЮ КОМПОЗИЦИЮ СЦЕНЫ | 2013 |
|
RU2536675C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ | 2010 |
|
RU2448323C1 |
| Способ и устройство проецирования изображения с лазерным усилением яркости | 2017 |
|
RU2692084C1 |
| ПРОЕКЦИОННОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ ОТОБРАЖЕНИЯ ПОЛНОГО ИЗОБРАЖЕНИЯ ДЛЯ ПРОЕКЦИОННЫХ ПОВЕРХНОСТЕЙ ПРОИЗВОЛЬНОЙ ФОРМЫ ИЛИ НАКЛОННЫХ ПРОЕКЦИОННЫХ ПОВЕРХНОСТЕЙ | 2012 |
|
RU2587502C2 |
| Способ формирования цифрового панорамного изображения | 2016 |
|
RU2654127C1 |
| АППАРАТ ДЛЯ ПОЛУЧЕНИЯ КОМПЬЮТЕРНЫХ РЕНТГЕНОВСКИХ ИЗОБРАЖЕНИЙ И СПОСОБ ПОЛУЧЕНИЯ ТАКИХ ИЗОБРАЖЕНИЙ | 1997 |
|
RU2134450C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОШИБОК ЦИФРОВОЙ ЗАПИСИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2344477C1 |
Изобретение относится к области обработки изображений и может быть использовано для формирования фотореалистичных изображений при любых расстояниях от объекта съемки до съемочной камеры, при любых погрешностях, вносимых объективами при формировании изображений. Технический результат заключается в повышении качества изображений. Технический результат достигается тем, что в способе с помощью объектива проецируют исходное оптическое изображение объекта на блок светочувствительных элементов, формируют исходное матричное изображение (МИ) объекта, для части элементов исходного МИ определяют расстояние, однозначно соответствующее расстоянию от объектива до участка объекта; формируют окончательное МИ объекта, такое, что характеристика взаимного положения элементов окончательного МИ максимально точно соответствует измененному, в соответствии с заданным масштабом, взаимному положению аксонометрических проекций соответствующих элементам окончательного МИ видимых со стороны объектива участков объекта на перпендикулярную линии проецирования плоскость проецирования вдоль параллельных линий проецирования, по крайней мере, одна из которых проходит через видимую через объектив часть объекта и пересекает внешнюю поверхность внешней, наиболее удаленной от блока светочувствительных элементов, линзы объектива, а каждый элемент окончательного МИ отображает информацию об усредненной яркости цветовой составляющей соответствующего элементу окончательного МИ участка объекта. 14 з.п. ф-лы, 6 ил.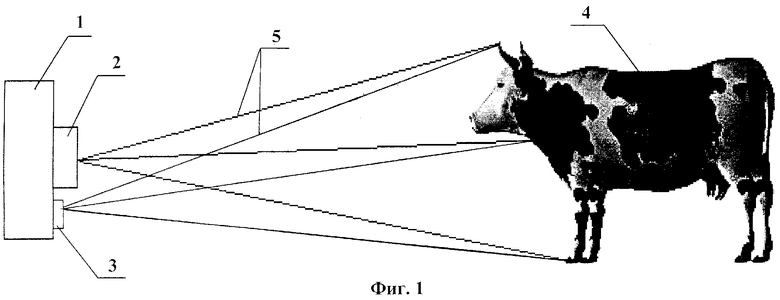
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1998 |
|
RU2193798C2 |
| US 6278491 B1, 21.08.2001 | |||
| US 6091419 A, 18.07.2000 | |||
| US 6122014 A, 19.09.2000. | |||

