Изобретение относится к области бесконтактных оптических измерений и может быть применено в тех отраслях народного хозяйства, где имеется потребность оперативного измерения, фиксации и сравнения геометрических параметров, в частности формы и пространственного положения поверхностей объектов, например в робототехнике (системы технического зрения), машиностроении (включая задачи прототипирования), медицине (ортопедия), архитектуре, скульптуре, дизайне, при конструировании и моделировании одежды.
Под измерением формы поверхности понимается восстановление функции z(x, y), где x, y - координаты точки объекта вдоль некоторой опорной плоскости, a z - расстояние между этой точкой поверхности и опорной плоскостью. Эта же задача в литературе также называется определением (измерением) рельефа поверхности, оконтуриванием поверхности, профилометрией поверхности или топографической съемкой. Под измерением пространственного положения поверхности подразумевается определение абсолютных пространственных координат точек поверхности объекта в пространстве измерительного устройства.
Поверхность, форма которой подлежит измерению, далее для краткости будем называть «измеряемая поверхность».
Известно множество способов, в которых световой поток с известным распределением интенсивности освещенности (полосы, пятна, решетки или специальные значки) проецируют на измеряемую поверхность, а затем исследуют изображение освещенной таким образом поверхности, полученное с иного направления, чтобы по деформации освещающего распределения вычислить ее форму. Частным их случаем являются способы, в которых изображение объекта, освещаемого через набор полос с синусоидальным распределением интенсивности освещенности, анализируется с использованием методов фазовой модуляции или фазового сдвига. Для получения подобного распределения интенсивности освещенности используют выходное поле лазерного интерферометра либо освещение проектором через специально подготовленный слайд.
Известен способ оптического измерения формы поверхности трехмерного объекта с использованием одного набора линий, предназначенный для измерения трехмерных координат точек на контурах поверхности объекта (патент США №5612786, НКИ 356/376, опубл. 18.03.1997 г.). В рамках этого способа помещают объект в поле зрения оптической системы, состоящей из проектора и камеры, проецируют на объект прозрачный слайд с одним набором полос, интенсивность которых меняется по синусоидальному закону, получают предварительное фазовое распределение, содержащее фазы каждой из множества ячеек, находящихся в соответствии с точками объекта, после чего проводят процедуру доопределения распределения фаз до полного фазового угла (phase unwrapping) и преобразуют набор восстановленных фаз в набор трехмерных координат упомянутого объекта для каждой из ячеек, используя набор уравнений, содержащий фиксированные калибровочные параметры, значения которых устанавливаются во время предварительной калибровочной процедуры. Процедура доопределения полного фазового угла, иначе определяемая как восстановление номера полосы, выполняется путем минимизации приращений полных фазовых углов в соседних ячейках исходя из предположения о гладкости измеряемой поверхности и исключении резких скачков координат ее соседних точек.
В одном из вариантов этого способа получают как минимум три изображения объекта, причем эти изображения отличаются определенным фазовым сдвигом, который создается перемещением находящегося в проекторе держателя, в котором закреплен упомянутый слайд с набором линий. Для определения абсолютной фазы, а следовательно, абсолютных координат одна линия из этого набора маркируется.
Недостатки этого способа заключаются в том, что он не может быть использован для измерения формы поверхности объектов, имеющих участки, обладающие высокой способностью отражать или рассеивать свет, так что при освещении проектором сразу всей поверхности в процессе измерений происходит однократное или многократное переотражение или рассеяние света с интенсивностью, достаточной для получения ложных или искаженных результатов измерения.
Наиболее близким к заявленному является способ оптического измерения формы поверхности, включающий размещение поверхности в поле освещения проекционной оптической системы и одновременно в поле зрения устройства для регистрации изображений упомянутой поверхности, проецирование с помощью упомянутой проекционной оптической системы на измеряемую поверхность набора изображений с заданной структурой светового потока, регистрацию набора соответствующих изображений поверхности при ее наблюдении под углом, отличным от угла проецирования набора изображений, и определение формы измеряемой поверхности по зарегистрированным изображениям (см. патент РФ №2148793, МПК G01B 11/24, опубл. 10.05.2000 г.). При этом на упомянутую поверхность проецируют поочередно как минимум три периодические распределения интенсивности освещенности, представляющие собой набор полос, интенсивность которых в поперечном направлении меняется по синусоидальному закону, причем упомянутые периодические распределения интенсивности освещенности отличаются сдвигом этого набора полос в направлении, перпендикулярном полосам, на контролируемую величину в пределах полосы, обрабатывают зарегистрированные изображения для получения предварительного фазового распределения, содержащего фазы, соответствующие точкам поверхности. Кроме того, на упомянутую поверхность однократно проецируют дополнительное распределение интенсивности освещенности, позволяющее для каждой точки упомянутой поверхности определить номер полосы из упомянутого набора полос, регистрируют дополнительное изображение упомянутой поверхности, получают для каждой видимой точки упомянутой поверхности результирующее фазовое распределение, исходя из упомянутого изображения объекта, освещенного предварительным фазовым распределением, и упомянутого изображения объекта, освещенного дополнительным распределением освещенности. А из упомянутого результирующего фазового распределения получают абсолютные координаты точек упомянутой поверхности с использованием данных предварительной калибровки.
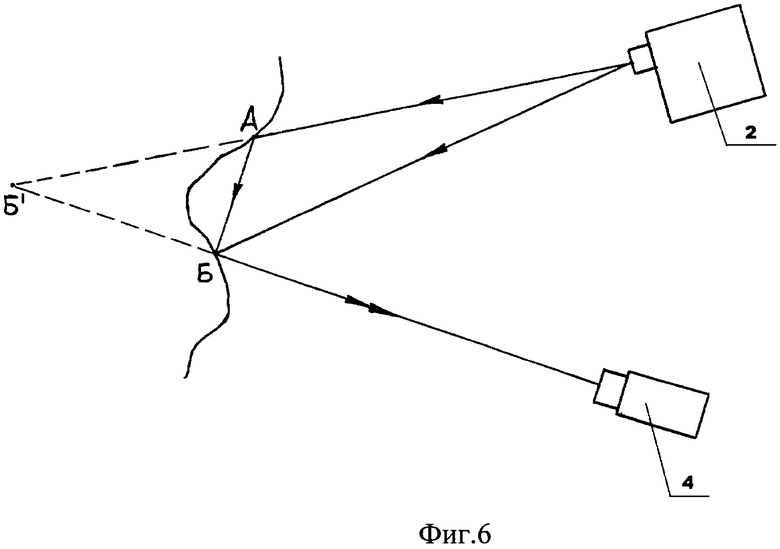
При проведении измерений по вышеуказанным способам предполагается, что регистрация изображения каждой точки поверхности происходит в условиях, когда ее освещение происходит только прямым лучом проектора, и освещенность изображения данной точки объекта на регистраторе изображений считается пропорциональной яркости луча, падающего на эту точку непосредственно от проектора. Однако измерения проводят в условиях, когда освещена вся измеряемая поверхность, а из оптики известно, что в этих условиях данную точку поверхности могут осветить и другие лучи, отразившиеся или рассеянные от других участков той же поверхности или посторонних объектов. Механизм возникновения паразитной засветки при переотражениях поясняется схемой, показанной на фиг.6.
Когда поверхность имеет матовый характер, свет от нее равномерно рассеивается в полный телесный угол, поэтому уже дважды рассеянный свет столь слаб, что паразитной засветкой измеряемой точки многократно рассеянными лучами в большинстве случаев можно пренебречь по сравнению с яркостью однократно рассеянного луча, который, в основном, и фиксируется регистратором.
Однако, если поверхность имеет участки со значительным зеркальным блеском, такое предположение для части участков измеряемой поверхности становится неверным, что приводит к росту погрешности измерений вплоть до возникновения грубых ошибок, когда регистратор «видит» вместо некоторой точки измеряемой поверхности совершенно другую точку той же поверхности, отраженную в ней.
На практике возможны и более сложные случаи переотражений - последовательные, когда освещение одного участка приводит к паразитной засветке другого и далее к засветке третьего участка светом, рассеянным или отраженным от второго и т.д., и взаимные, когда при освещении одного участка засвечивается другой, а при освещении этого другого полностью или частично засвечивается первый.
Независимо от того, каким физическим механизмом, зеркальным отражением или рассеянием, обусловлено влияние освещения одной части поверхности на измерения на другой части, в данном описании далее для краткости используется термин «переотражение».
Предварительное покрытие измеряемой поверхности специальными составами, уменьшающими переотражение, например матирующими составами, значительно увеличивает трудоемкость способа и удлиняет его реализацию.
Предлагаемое изобретение решает задачу проведения оптических измерений формы поверхности объекта в условиях однократных, многократных последовательных или взаимных переотражений света от отдельных участков указанной поверхности.
Технический результат, достигаемый изобретением, заключается в повышении точности измерений, снижении вероятности получения ложных или искаженных результатов измерения, расширении класса измеряемых поверхностей, уменьшении объема операций по подготовке поверхности.
Указанный технический результат достигается тем, что в способе оптического измерения формы поверхности, включающем проецирование на измеряемую поверхность набора изображений с заданной структурой светового потока, регистрацию набора соответствующих изображений поверхности при ее наблюдении под углом, отличным от угла проецирования набора изображений, и определение формы измеряемой поверхности по зарегистрированным изображениям, предварительно определяют переотражающие участки измеряемой поверхности, при освещении которых под углом проецирования набора изображений возникает паразитная засветка других участков измеряемой поверхности, затеняют переотражающие участки при проецировании набора изображений, измеряют форму освещенных участков поверхности, а проецируя набор изображений с заданной структурой светового потока на ранее затененные переотражающие участки, измеряют форму поверхности на переотражающих участках.
Указанный технический результат при кратных последовательных или взаимных переотражениях достигается тем, что последовательность действий по проецированию набора изображений с заданной структурой светового потока с затенением переотражающих участков, регистрации изображений поверхности и определению формы участков поверхности повторяют до получения результатов по всем участкам поверхности.
Указанный технический результат достигается также тем, что для проецирования на измеряемую поверхность набора изображений используют цифровой проектор.
Изобретение поясняется чертежами.
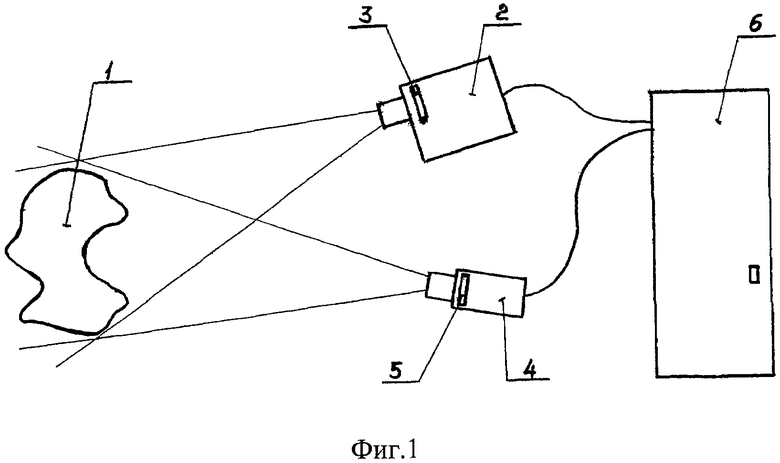
На фиг.1 изображен общий вид устройства, предназначенного для осуществления предлагаемого способа.
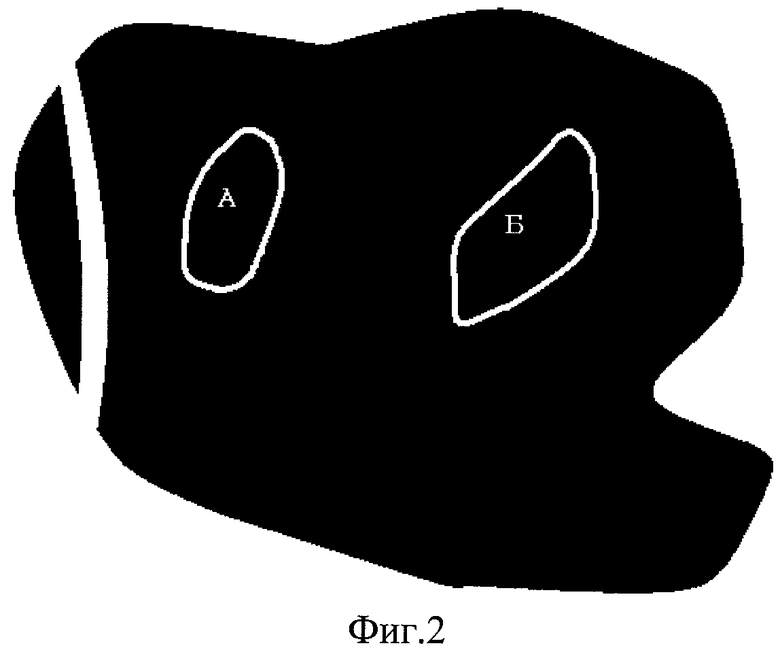
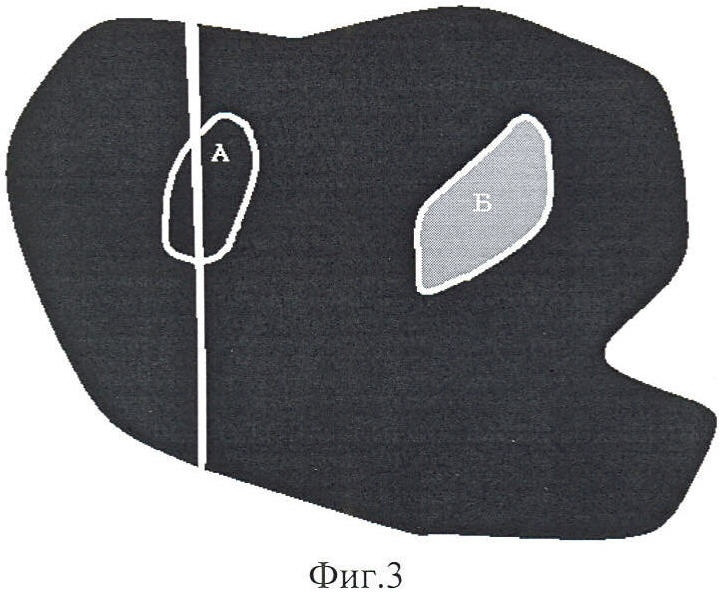
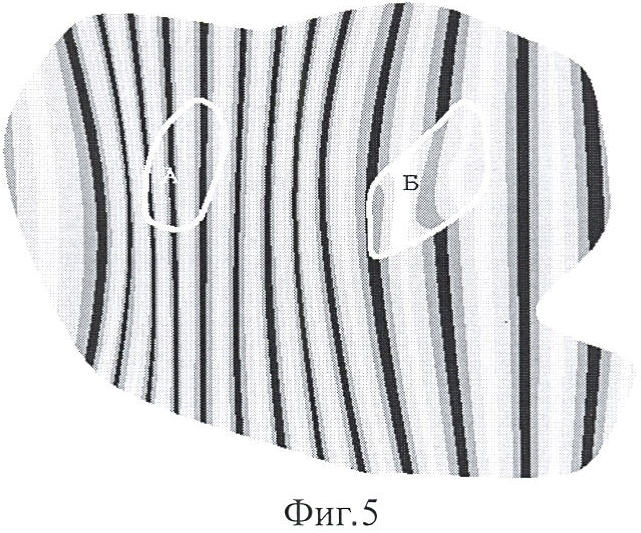
Фиг.2-5 схематично изображают картину, наблюдаемую со стороны камеры, в разные моменты осуществления заявленного способа. На фиг.2 показана световая картина на измеряемой поверхности в один из моментов времени в ходе процедуры предварительного определения переотражающих участков измеряемой поверхности, переотражающий участок А не освещен. На фиг.3 то же, что на фиг.2, но в другой момент времени, когда освещена часть переотражающего участка А, и засвечен участок Б (освещен светом, переотраженным от участка А). На фиг.4 показана световая картина на измеряемой поверхности при проецировании одного из изображений с заданной структурой светового потока (из набора таких изображений) при затенении переотражающего участка А. На фиг.5 показана световая картина на измеряемой поверхности при проецировании одного из изображений с заданной структурой светового потока (из набора таких изображений) в том числе на ранее затененный переотражающий участок А. При этом картина полос на участке Б искажена, и полосы имеют более низкий контраст, что поясняет необходимость затенения участка А при получении результатов измерений на участке Б, а также невозможность измерения на участке Б в случае, если освещен, по меньшей мере, участок А.
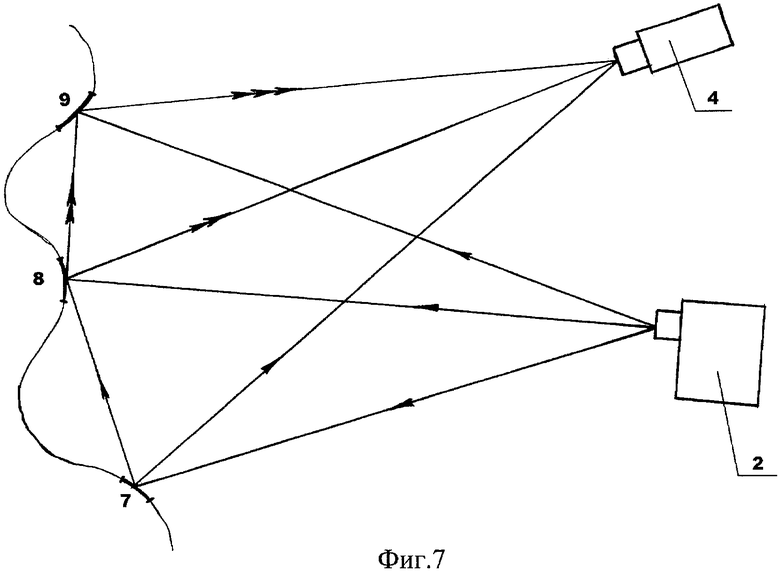
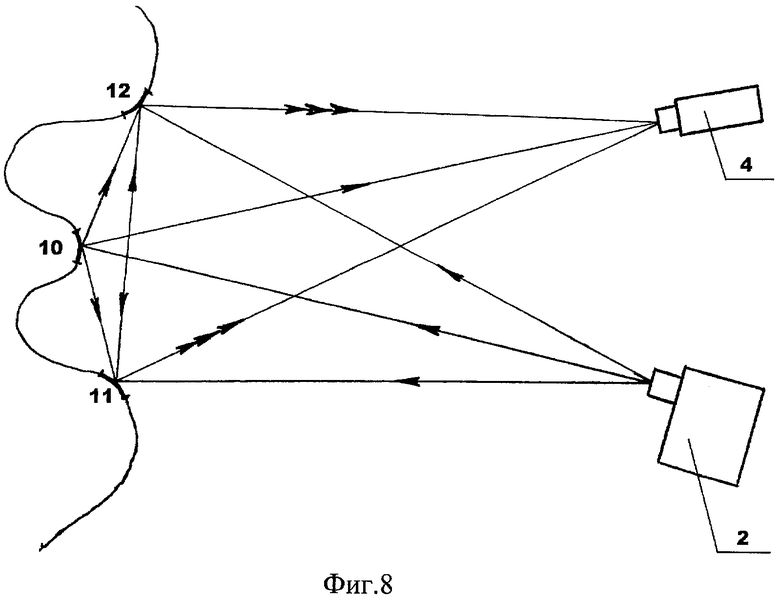
Фиг.6-8 показывают схемы возможных вариантов переотражения. Наложение лучей при переотражениях схематически показано двойными и тройными стрелками. На фиг.6 показана схема, поясняющая механизм однократных переотражений при измерениях формы поверхности и возникновение ложной измерительной информации. На измерения на участке Б влияет засветка от участка А, так что возникает ложная информация об участке Б, соответствующая участку-«призраку» (Б'). На фиг.7 показана схема, поясняющая частный случай многократного переотражения. На фиг.8 показана схема, поясняющая частный случай взаимного переотражения.
Устройство (фиг.1) для осуществления предлагаемого способа оптического измерения формы поверхности объекта 1 содержит проекционную оптическую систему, в качестве которой, например, может быть использован цифровой проектор 2, в частности видеопроектор LCD-типа с жидкокристаллической (ЖК) матрицей 3 в качестве элемента, формирующего заданную структуру светового потока, обеспечивающую необходимые распределения освещенностей (включая требуемые затенения) на объекте измерений 1. Устройство содержит также средство для регистрации изображения измеряемой поверхности, в качестве которого может быть использована цифровая видео- или фотокамера 4, например камера со светочувствительной матрицей 5. Устройство, кроме того, содержит электронно-вычислительную машину (ЭВМ) 6, предназначенную для обработки и хранения оцифрованных изображений, формируемых камерой 4, а также для управления матрицей 3 цифрового проектора 2, с целью создания требуемой структуры освещения, проецируемого на объект 1.
Предлагаемый способ осуществляется следующим образом.
Поверхность объекта 1 размещают в поле освещения цифрового проектора 2 и одновременно в поле зрения цифровой камеры 4. При этом оптические оси объективов цифрового проектора 2 и цифровой камеры 4 устанавливают так, чтобы они были не коллинеарны и не параллельны.
Объектив цифрового проектора 2 настраивают таким образом, чтобы создаваемое изображение рисунка, находящегося на жидкокристаллической матрице 3 цифрового проектора 2, покрывало всю измеряемую часть поверхности объекта 1. При этом возникает взаимно однозначное соответствие, в пределах, определяемых глубиной резкости и размером пикселя, между пикселями LCD-матрицы и точками поверхности объекта 1. Объектив цифровой камеры 4 настраивают так, чтобы, в пределах глубины резкости, на светочувствительной матрице 5 возникло изображение измеряемого объекта. При этом также возникает взаимно-однозначное соответствие, в пределах, определяемых глубиной резкости и размером пикселя, между пикселями матрицы 5 цифровой видеокамеры 4 и точками поверхности объекта 1.
Для применения способа необходимо определить переотражающие участки измеряемой поверхности, при освещении которых под углом проецирования набора изображений с заданной структурой светового потока и наблюдении с направления регистрации изображений возникает паразитная засветка одних участков измеряемой поверхности отраженным или рассеянным светом от других.
Простейший способ для определения указанных участков заключается в том, что всю измеряемую поверхность сканируют дискретно перемещаемым лучом, освещающим ее под тем же углом, под которым в дальнейшем предполагается проецировать на эту поверхность набор изображений с заданной структурой светового потока. Площадь пятна освещения от упомянутого луча на измеряемой поверхности выбирают минимальной, исходя из возможностей используемого оборудования. Переотражающими являются те участки измеряемой поверхности, при попадании луча на которые цифровая камера фиксирует освещенность любых других участков измеряемой поверхности, которые не освещены прямым сканирующим лучом.
Для случая, когда измерения формы поверхности объекта выполняют с использованием синусоидального растра - набора синусоидальных полос (см. патент РФ №2148793, МПК G01B 11/24, опубл. 10.05.2000 г.), указанная процедура может быть выполнена следующим образом (фиг.2, 3).
С помощью цифрового проектора 2, под управлением программы ЭВМ 6, на ЖК-матрице создают изображение светлой полосы шириной в один пиксель на черном фоне и проецируют его на объект 1. Полученное на объекте изображение полосы (назовем ее «освещающей») ориентируют в направлении линий синусоидального растра, используемого в дальнейшем для измерения формы поверхности объекта 1 (см. фиг.2, 3, 4, 5). Указанную освещающую полосу перемещают в поперечном по отношению к линиям синусоидального растра направлении с минимальным для данного проектора шагом (на ЖК-матрице - с шагом в один пиксель), проходя от края до края все поле освещения объекта измерений. Одновременно с этим процессом с помощью цифровой камеры 4 регистрируют изображения объекта 1 измерений для каждого положения освещающей полосы. Зарегистрированную последовательность оцифрованных изображений сохраняют в ЭВМ 6 и производят их обработку. Для выполнения указанной обработки с учетом требуемой точности измерений задают числовой порог, выше которого пиксель изображения объекта считают освещенным. Переотражение фиксируют, если пиксель изображения в камере оказывается освещенным несколько раз, а не один раз, когда полоса от проектора напрямую освещает соответствующий участок поверхности. На фиг.3 и 5 участок Б засвечен переотраженным от участка А светом, фиг.3 - при поиске и определении переотражающих участков, фиг.5 - при измерениях.
В зависимости от обнаруженных переотражений определяют необходимые затенения переотражающих участков и необходимое количество циклов измерения формы поверхности. При любой комбинации переотражений для любого участка поверхности всегда можно провести измерения с исключением влияния засветки от переотражений, если в момент измерений этого участка все другие участки, влияющие на результат этого измерения, затенены.
Таким образом определяют необходимое количество циклов измерения формы поверхности, для каждого цикла определяют требуемые затенения участков и формируют последовательность освещающих изображений, а для пикселей видеокамеры определяют, данные какого из циклов измерений должны быть использованы.
Затем приступают непосредственно к процедуре оптического измерения формы поверхности с учетом выявленных переотражающих участков.
В том наиболее общем случае, когда процедура определения переотражающих участков выявила наличие только однократных переотражений, измерения выполняют следующим образом.
На поверхность объекта 1 с помощью цифрового проектора 2 проецируют как минимум три периодических распределения интенсивности освещенности, представляющих собой набор полос, интенсивность которых меняется по синусоидальному закону, причем упомянутые периодические распределения интенсивности освещенности отличаются сдвигом этого набора полос в направлении, перпендикулярном полосам, на контролируемую величину в пределах полосы, и дополнительное распределение интенсивности освещенности, позволяющее для каждой точки упомянутой поверхности определить номер полосы из упомянутого набора полос, при этом во всех случаях проецирования упомянутые переотражающие участки поверхности оставляют неосвещенными (затеняют), что можно выполнить, либо помещая на пути лучей проектора непрозрачные шторки или экраны, либо модифицируя данные, передаваемые проектору, таким образом, чтобы переотражающие участки оставались темными (фиг.4). При проецировании каждого распределения интенсивности освещенности осуществляют, с помощью камеры 3, регистрацию соответствующего цифрового изображения объекта 1. По данным оцифрованных изображений, полученных при проецировании наборов синусоидальных полос, определяют предварительное фазовое распределение, из которого далее, по данным оцифрованного изображения объекта, полученного при проецировании дополнительного распределения интенсивности освещенности, получают результирующее фазовое распределение для всех точек измеряемой поверхности, кроме затененных переотражающих участков. Затем проецирование всех распределений интенсивности освещенности с регистрацией цифровых изображений осуществляют повторно, освещая, по меньшей мере, ранее затененные участки (например, освещая всю поверхность без затенений, фиг.5). Для каждой точки поверхности, которые были затенены ранее, тем же способом определяют предварительное и результирующее фазовые распределения, так что результирующее фазовое распределение оказывается известным для всей измеряемой поверхности. Наконец, из упомянутого результирующего фазового распределения для всей поверхности получают абсолютные координаты ее точек с использованием данных предварительной калибровки.
Таким образом, признак «затеняют» в настоящей заявке используется, по меньшей мере, в трех эквивалентных значениях. Во-первых, признак «затеняют» может быть реализован как действие, при котором создают тень (затенение) на нужных участках поверхности объекта 1 путем, например, установки преград (экранов) на пути света. Во-вторых, признак «затеняют» может быть реализован как такое действие, когда при проецировании набора изображений на измеряемую поверхность пространственная структура светового потока модифицируется таким образом, что участки, предназначенные для затенения, оказываются неосвещенными, а незатеняемые участки освещаются световым потоком с первоначальной заданной структурой. В третьих, признак «затеняют» какие-либо части может быть реализован как эквивалентный ему признак «выборочно освещают» остальные части поверхности.
В частных более сложных случаях, если процедура определения переотражающих участков выявила наличие кратных последовательных или взаимных переотражений (независимо от того, имеют ли место также и однократные переотражения), может оказаться, что двукратное использование исходной процедуры при однократном маскировании не позволяет получить корректные данные по всей измеряемой поверхности. В этом случае, измерения с маскированием проводят многократно до получения результатов по всей измеряемой поверхности.
Рассмотрим случай кратных переотражений (фиг.7). Пусть освещение участка 7 порождает переотражение на участки 8 и 9, а освещение участка 8 порождает переотражение на участок 9. Таким образом, участок 9 может быть измерен только при затененных 7 и 8, участок 8 - только при затененном 7, при этом данные с участка 9 искажены паразитной засветкой и не могут использоваться, даже если участок 9 не затенен. Наконец, чтобы измерить участок 7, его необходимо осветить и измерить, но при этом данные, получаемые с участков 8 и 9, искажены и не будут приниматься во внимание. В таком случае процедура измерений состоит в получении данных для участка 9 при затенении участков 7 и 8 с последующим получением данных для участка 8 при затенении участка 7 и получении данных для участка 7 и всей остальной поверхности при освещении без затенений.
Рассмотрим случай взаимных переотражений (фиг.8), когда имеется переотражение с участка 10 на участки 11 и 12, участок 11 переотражает свет на участок 12, а участок 12 - на участок 11. Для измерений на участке 11 должны быть затенены участки 10 и 12, для измерений на участке 12 должны быть затенены участки 10 и 11, а для измерений на участке 10 он должен быть освещен (причем независимо от освещения участков 11 и 12). В таком случае процедура измерений должна быть выполнена трижды: при затененных 10 и 11 измеряется участок 12, при затененных 10 и 12 измеряется участок 11, и при полном освещении поля измерений (или при любых затенениях любых других участков, кроме участка 10) измеряется участок 10.
Приведенные примеры демонстрируют возможность применения заявленного способа и в случаях с более сложными переотражениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНОЙ ГЕОМЕТРИИ ВЫПУКЛЫХ И ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2708940C1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОГО ИЗМЕРЕНИЯ РАЗМЕРОВ И КОНТРОЛЯ ФОРМЫ ТЕЛА, ОГРАНИЧЕННОГО НАБОРОМ СВЯЗАННЫХ МЕЖДУ СОБОЙ ПОВЕРХНОСТЕЙ | 2013 |
|
RU2522809C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОБЪЕКТА И ПРЕДСТАВЛЕНИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ НА УПОМЯНУТОЙ ПОВЕРХНОСТИ | 2005 |
|
RU2295110C1 |
| УСТРОЙСТВО ТРЕХМЕРНОГО СКАНИРОВАНИЯ СЦЕНЫ С НЕЛАМБЕРТОВЫМИ ЭФФЕКТАМИ ОСВЕЩЕНИЯ | 2014 |
|
RU2573767C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ ОБЪЕКТА | 1992 |
|
RU2042920C1 |
| Способ получения муаровых полос при определении деформаций объекта | 1990 |
|
SU1737263A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2105265C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОЕКЦИИ ОБЪЕКТА С ПОМОЩЬЮ ПРОНИКАЮЩЕГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2098797C1 |
| Способ определения мест утечек тока в группах фотопреобразователей | 1978 |
|
SU767671A1 |
Изобретение относится к области бесконтактных оптических измерений геометрических параметров поверхностей объектов. Способ включает проецирование на измеряемую поверхность набора изображений с заданной структурой светового потока, регистрацию набора соответствующих изображений поверхности при ее наблюдении под углом, отличным от угла проецирования набора изображений и определение формы измеряемой поверхности по зарегистрированным изображениям. Предварительно определяют переотражающие участки измеряемой поверхности, при освещении которых под углом проецирования набора изображений возникает паразитная засветка других участков измеряемой поверхности. Переотражающие участки при проецировании набора изображений затеняют и определяют форму освещенных участков поверхности. Затем, проецируя набор изображений с заданной структурой светового потока на ранее затененные переотражающие участки, определяют форму поверхности на переотражающих участках. Технический результат заключается в снижении вероятности получения ложных или искаженных результатов измерения и в расширении класса измеряемых поверхностей. 2 з.п. ф-лы, 8 ил.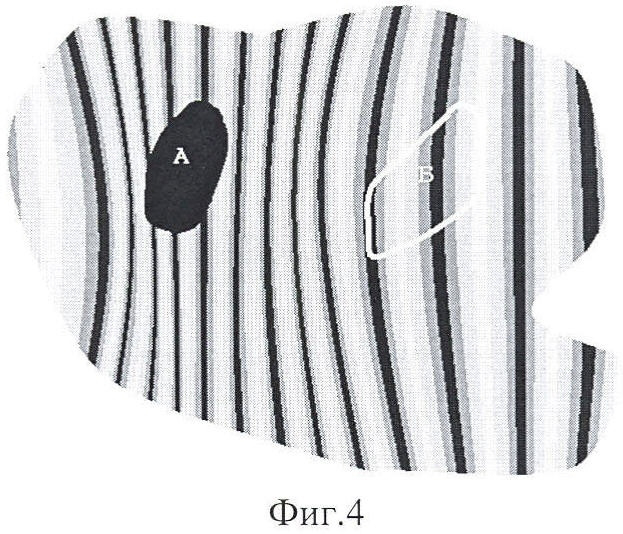
1. Способ оптического измерения формы поверхности, включающий проецирование на измеряемую поверхность набора изображений с заданной структурой светового потока, регистрацию набора соответствующих изображений поверхности при ее наблюдении под углом, отличным от угла проецирования набора изображений, и определение формы измеряемой поверхности по зарегистрированным изображениям, отличающийся тем, что предварительно определяют переотражающие участки измеряемой поверхности, при освещении которых под углом проецирования набора изображений возникает паразитная засветка других участков измеряемой поверхности, затеняют переотражающие участки при проецировании набора изображений, определяют форму освещенных участков поверхности, а проецируя набор изображений с заданной структурой светового потока на ранее затененные переотражающие участки, определяют форму поверхности на переотражающих участках.
2. Способ оптического измерения формы поверхности по п.1, отличающийся тем, что при кратных последовательных и взаимных переотражениях последовательность действий по проецированию набора изображений с заданной структурой светового потока с затенением переотражающих участков, регистрации изображений поверхности и определению формы участков поверхности повторяют до получения результатов по всем участкам поверхности.
3. Способ оптического измерения формы поверхности по п.1, отличающийся тем, что для проецирования на измеряемую поверхность набора изображений используют цифровой проектор.
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
| Устройство для изготовления армокаркасов негабаритных напорных водоводов | 1980 |
|
SU895577A1 |
| Способ бесконтактного контроля профиля криволинейных поверхностей объектов | 1975 |
|
SU534646A1 |
| WO 9958930 A1, 18.11.1999 | |||
| EP 1117975 B1, 26.04.2006. | |||

