Изобретение относится к области ракетной техники и может быть использовано как в больших, так и в малогабаритных ракетах, с гиперзвуковыми скоростями полета, запускаемых из транспортно-пусковых контейнеров.
Известна зенитная управляемая ракета комплекса "Тунгуска" - твердотопливная, бикалиберная двухступенчатая с отделяемым стартовым двигателем, выполненная по схеме "утка". Маршевая ступень имеет стержневую боевую часть большого удлинения, аппаратуру управления и блок непрерывного светового излучения (Журнал Военно-промышленного комплекса "Военный парад", ноябрь-декабрь 1994 г., статья "Зенитный пушечно-ракетный комплекс "Тунгуска", с.139-141).
Известна зенитная управляемая ракета комплекса "Тунгуска-М1", которая размещена в транспортно-пусковом контейнере, выполнена по бикалиберной схеме и состоит из маршевой ступени и отделяемой механизмом разделения стартовой ступени. Маршевая ступень состоит из боевого снаряжения, включающего осколочно-стержневую боевую часть, контактный и неконтактный взрыватели с головным обтекателем, и функциональным блоком, содержащим рулевой привод, гироскопический координатор, электронную аппаратуру, высокочастотный блок и блок светового излучателя (Журнал Военно-промышленного комплекса "Военный парад", май-июнь 1999 г., статья "Тунгуска" становится эффективней", с.86-88 и март-апрель 1999 г., статья "Зенитный пушечно-ракетный комплекс "Тунгуска-M1", с.20).
Известна зенитная управляемая ракета, состоящая из отделяемой стартовой ступени и маршевой ступени с аппаратурой радиокомандного управления и блоком светового излучателя, установленного в задней части ступени (Зенитная управляемая ракета. Патент RU № 2167390, МПК 7 F42B 15/10 от 20.05.2001).
Отличительной общей особенностью этих ракет является наличие двух ступеней, отделяемой стартовой ступени и маршевой ступени, в которой устанавливается рулевой привод, управляющий аэродинамическими органами управления. Рулевой привод работает на горячем газе от порохового аккумулятора давления (ПАД). Недостатками такого типа привода, а следовательно, и ракет с ним, являются:
1. Большие масса и габариты из-за необходимости применения на борту ракеты автономного источника питания (ПАДа).
2. Необходимость использования дополнительных устройств на пути газового потока от ПАДа к приводу, таких как фильтры грубой и тонкой очистки газа.
3. Зависимость габаритных размеров ПАДа, а именно, его длины от времени полета ракеты, так как длина пороховой шашки ПАДа, а следовательно, и ПАДа в целом, определяется произведением скорости горения выбранной марки пороха шашки на время полета ракеты.
4. Низкая надежность работы из-за возможности засорения фильтров очистки и дросселирующих отверстий газового распределительного устройства привода продуктами сгорания пороха.
5. Твердые примеси, содержащиеся в продуктах сгорания почти всех типов порохов, могут привести к значительной эрозии и повреждению посадочных мест или кромок дросселей распределительных устройств. Кроме того, высокие температуры могут ухудшить прочность материалов, из которых выполнены распределительные устройства.
6. Низкая безопасность работы из-за возможности взрыва в результате увеличения давления газа в камере ПАДа выше допустимого в случае существенного снижения расхода газа при уменьшении критического расходного сечения в цепи источник газа - потребитель из-за возможного засорения.
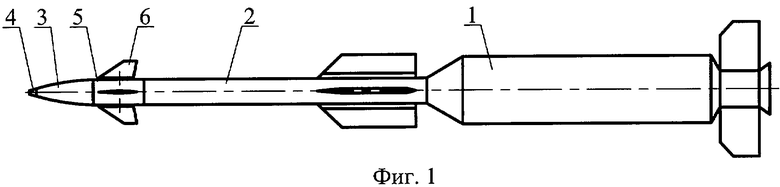
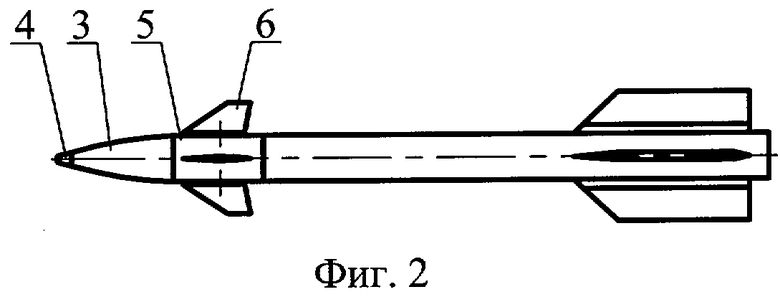
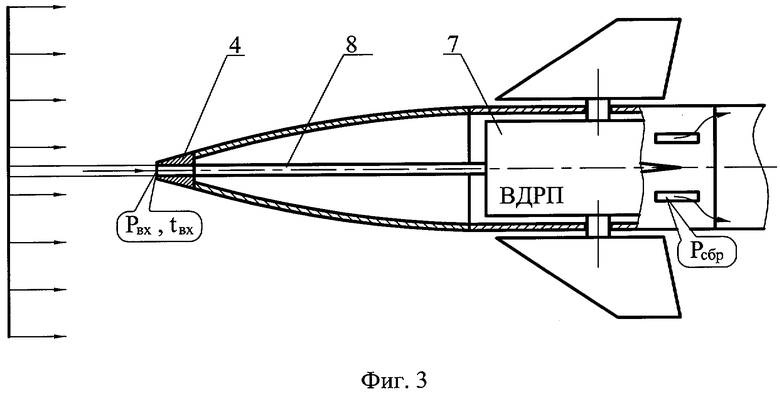
Известна гиперзвуковая управляемая ракета, принятая авторами в качестве ближайшего аналога (прототипа) к предлагаемому изобретению, в которой устранены недостатки управляемых ракет из источников [1-3]. На фиг.1, 2, 3 представлена принципиальная конструктивная схема гиперзвуковой управляемой ракеты с ВДРП. Ракета состоит из отделяемой стартовой ступени 1, маршевой ступени 2 с головной частью 3, носовым воздухозаборником 4 и корпусом 5 с воздушно-динамическим рулевым приводом 7 и аэродинамическими органами управления 6. Головная часть выполнена с обтекателем из нежаростойкого материала конусообразной формы, внутри которого проходит канал 8 для воздушного потока от входа воздухозаборника к входу газового распределительного устройства рулевого привода (А.Г.Шипунов, В.Д.Дудка, B.C.Фимушкин, Б.А.Никаноров. Рулевой привод для ракет комплексов высокоточного оружия, "Военный парад", 1(37), 2000).
Как известно из источников информации [4-7], воздушно-динамический рулевой привод (ВДРП) нашел широкое применение в дозвуковых и сверхзвуковых управляемых снарядах и ракетах комплексов высокоточного оружия. Привод использует для управления энергию обтекающего снаряд или ракету потока воздуха. Исключение из состава снаряда или ракеты бортового источника питания обеспечивает работу привода все время, пока движется снаряд или ракета, и сокращает массу, объем и трудоемкость привода, что является достоинством такого типа привода, то есть недостатки управляемых ракет с приводом, работающим от ПАДа, устранены, но возникает проблема применения ВДРП в ракетах с гиперзвуковыми скоростями полета. Дело в том, что использование энергии обтекающего ракету воздушного потока для ракет с большой сверхзвуковой и гиперзвуковой скоростью полета связано с возникновением больших температур воздушного потока на входе ВДРП вследствие кинетического нагрева, что усугубляется также дополнительно и силовым воздействием воздушного потока - давлением торможения на элементы конструкции воздушно-динамического рулевого привода (температуры торможения и давления торможения на входе воздухозаборника при полете снаряда или ракеты).
Температура торможения и давление торможения определяются из следующих известных в аэродинамике зависимостей:

где Твх - температура на входе воздухозаборника (температура торможения). К;
Та - температура окружающей среды, К;
 - число Маха;
- число Маха;
 - скорость звука, м/с;
- скорость звука, м/с;
v - скорость полета снаряда или ракеты;



где Рu - избыточное давление на входе воздухозаборника, кг/см2;
 - статическое давление окружающей среды, кг/см2;
- статическое давление окружающей среды, кг/см2;
Н - высота полета снаряда или ракеты;
ρ - плотность воздуха.
Так например, температура торможения [9, стр.517, Температура торможения] на входе воздухозаборника в диапазоне скоростей до М=6,0 при Ta=293 К (t=20°С) из выражения для Твх составляет
Видно, что в диапазоне гиперзвуковых скоростей (М=5,5-6,0) наблюдается резкое увеличение температуры торможения, измеряемой несколькими тысячами градусов Цельсия (2130°С). И это при давлении торможения в несколько десятков атмосфер (40-50 кг/см2), как это видно из графика в источнике [5, рис.3, кривая 2].
Поэтому повышение скорости управляемой ракеты с ВДРП является трудновыполнимой технической задачей, без решения которой затруднено дальнейшее расширение областей применения воздушно-динамических рулевых приводов. Это является существенным сдерживающим фактором для применения этого типа привода в высокоскоростных управляемых снарядах и ракетах, и без принятия специальных мер как в выборе конструкционных материалов, так и в конструкции воздухозаборного устройства привода, он не может быть реализован.
В части применения известного перспективного воздушно-динамического рулевого привода [4-7] в высокоскоростных управляемых ракетах и снарядах эта задача не решена. Работоспособность привода на воздухе с высокими параметрами по температуре и давлению торможения, его выходные параметры быстродействия и точности, надежности работы не обеспечиваются при использовании ВДРП в составе гиперзвуковых управляемых ракет и снарядов, что является существенным недостатком известного технического решения.
Задачей предлагаемого изобретения является обеспечение возможности работы гиперзвуковой управляемой ракеты с воздушно - динамическим рулевым приводом в условиях кинетического нагрева элементов конструкции рулевого привода, расширение границ возможного использования разработанных перспективных воздушно-динамических рулевых приводов в высокоскоростных управляемых ракетах и снарядах высокоточных комплексов управляемого вооружения.
Эта задача решается за счет того, что в гиперзвуковой управляемой ракете, состоящей из отделяемой стартовой ступени, маршевой ступени, включающей головную часть с корпусом, в котором размещен воздушно-динамический рулевой привод с аэродинамическими органами управления, головной обтекатель, в котором выполнен носовой воздухозаборник и внутренний продольный канал, обтекатель выполнен из двух частей - носовой, являющейся воздухозаборником, и основной. Воздухозаборник выполнен из интерметаллического сплава, при этом носовая часть обтекателя жестко закреплена с обеспечением герметичности в основной части обтекателя.
Основная часть обтекателя выполнена из жаростойкой нержавеющей стали, снабжена внутри многоступенчатым сквозным продольным отверстием для установки носовой части обтекателя, теплообменного устройства и крепления к корпусу маршевой ступени.
Теплообменное устройство состоит из рассекателя газового потока, который выполнен из жаростойкого интерметаллического сплава, с входным каналом, переходящим в несколько каналов меньшего диаметра, и выполненных из жаростойкой нержавеющей стали решеток в виде шайб с проточками и сквозными продольными отверстиями, пучка прямых тонкостенных трубок, установленных между решетками в их проточках вплотную друг к другу, поджимающей гайки, снабженной продольными отверстиями, герметично установленной пробки с коническим углублением на входе, соединенной посредством трубки с входом газового распределительного устройства рулевого привода.
Сущность изобретения поясняется чертежами.
На фиг.4 представлена принципиальная конструктивная схема управляемой ракеты с воздушно-динамическим рулевым приводом и теплообменным устройством, где:
4 - носовой обтекатель, 7 - ВДРП, 9 - основной обтекатель конусообразной формы с трубчатым теплообменным устройством 10, 11 - газовое распределительное устройство в виде струйной трубки, 12 - сквозной цилиндрический канал, 13 - двухступенчатый хвостовик, 14, 15, 16, 17 - сквозные ступенчатые полости, 18 - одноступенчатая резьбовая поверхность, 19 - рассекатель газового потока, 20 - трубки, 21 - решетки, 22 - поджимающая гайка, 23 - герметизирующая пробка, 24 - ресивер, 25 - рабочие полости исполнительного двигателя РП, 26 - поршни, 27 - усилитель, 28 - электромеханический преобразователь, Uy - сигнал управления, Х - перемещение поршня, δ - угол поворота рулей, Р - давление, Т - температура, V - объем, G - расход воздуха в первой и второй рабочих полостях исполнительного двигателя РП.
Внешний вид головной части с ВДРП известной гиперзвуковой управляемой ракеты приведен в известном источнике информации [7, стр.456 в разделе иллюстраций "Зенитных комплексов ПВО ближнего рубежа"].
Трубчатый теплообменник, в котором осуществляется теплообмен между высокотемпературным газом и аккумулирующим тепло материалом (стенками трубок), конструктивно выполнен в составе компактного теплообменного устройства и обеспечивает большой удельный теплоотвод при сравнительно малом его объеме и весе, по аналогии с известным [12, стр.80-139; 15, стр.383-386, 432-435; 16 стр.245, 1-й абзац снизу] в виде пучка прямых тонкостенных цилиндрических трубок из жаростойкой нержавеющей стали, например нержавеющей стали марки 12Х18Н10Т.
Выход теплообменника подсоединяется к полости 17, являющейся по сути дела ресивером, к выходу которой подключены входы (или вход, если он один) газовых распределительных устройств РП.
Для управляемых ракет, состоящих из отделяемой стартовой ступени и маршевой ступени, можно четко выделить два участка управляемого полета.
На первом участке происходит быстрый разгон ракеты от нулевой скорости до гиперзвуковой к моменту начала участка управления маршевой ступени. В соответствии со скоростью разгона изменяются и температура и давление торможения, достигая максимума к окончанию разгона.
На втором участке после отделения стартовой ступени происходит плавное уменьшение скорости до конца управляемого полета ракеты с одновременным соответствующим снижением температуры и давления торможения, что видно на графике изменения температуры [5, стр.195, рис.3, кривая 4 с момента времени полета τn≤3 с].
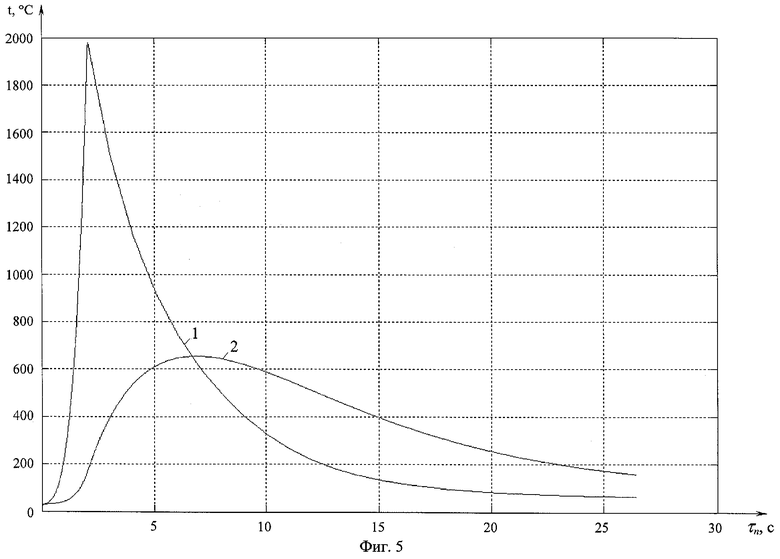
На фиг.5 приведены зависимости температуры торможения гиперзвуковой управляемой ракеты при полете со скоростью М=6,0 при Ta=333 К (t=+60°C) по времени полета τn=25 с (кривая 1 до, кривая 2 после введения прилагаемого технического решения). Видно, что максимальная температура, то есть пик температуры торможения составляет ≈2000°С, который уменьшается до ≈100°С к концу полета до введения предлагаемого технического решения (кривая 2).
Из анализа графиков температуры торможения по времени полета видно, что температура торможения (кривая 1) резко увеличивается по времени полета ракеты и имеет ярко выраженный пик к концу разгона ракеты, причем сравнительно ограниченный по времени, то есть процесс носит нестационарный (неустановившийся) характер [12, стр.171; 14, стр.8-9], очень динамичный по времени, при котором во времени меняется расход теплоносителя (нагретого воздуха) за счет изменения давления (в результате изменения скорости полета ракеты) и его температура на входе воздухозаборника.
Видно, что при введении предлагаемого технического решения (кривая 2) наблюдается существенное (примерно в 3 раза) уменьшение пика температуры торможения, получено ˜650°С вместо ˜2000°С до введения устройства. То есть тем самым обеспечено существенное снижение максимального пика температуры торможения потока на входе воздухозаборника до уровня не выше предельного, выдерживаемого материалами РП.
Предлагаемая управляемая ракета позволила обеспечить надежное функционирование воздушно-динамического рулевого привода при полете ракеты на гиперзвуковой скорости за счет эффективного (≈ в 3 раза) уменьшения пикового значения температуры торможения на входе газового распределительного устройства привода, достигаемого за счет термической инерционности теплообменника, в котором при резком увеличении температуры торможения проходящего газа при быстром разгоне ракеты до гиперзвуковой скорости происходит накопление тепловой энергии в стенках трубчатого теплообменника и снижение за счет этого температуры газа на выходе устройства и отдача накопленного тепла от стенки газу при снижении температуры газа на входе, что характерно на участке полета маршевой ступени, когда ракета летит по инерции и скорость ее плавно уменьшается.
Проведенные проверки опытных образцов предлагаемой малогабаритной управляемой ракеты с ВДРП подтвердили эффективность заложенного технического решения при полете с гиперзвуковыми скоростями в диапазоне М≤6,0.
Таким образом, предлагаемое техническое решение позволяет обеспечить возможность работы управляемой ракеты с воздушно-динамическим рулевым приводом на гиперзвуковой скорости и расширить границы возможного использования разработанных перспективных воздушно-динамических рулевых приводов в высокоскоростных управляемых ракетах и снарядах высокоточных комплексов управляемого вооружения.
Источники информации
1. Журнал Военно-промышленного комплекса "Военный парад", ноябрь-декабрь 1994 г., статья "Зенитный пушечно-ракетный комплекс "Тунгуска", с.139-141.
2. Журнал Военно-промышленного комплекса "Военный парад", май-июнь 1999 г., статья "Тунгуска" становится эффективней", с.86-88, и март-апрель 1999 г., статья "Зенитный пушечно-ракетный комплекс "Тунгуска-M1", с.20.
3. Зенитная управляемая ракета. RU. Патент № 2167390. Класс 7 F42B 15/10, БИ № 14, 20.05.2001.
4. А.Г.Шипунов, В.Д.Дудка, B.C.Фимушкин, Б.А.Никаноров. Рулевой привод для ракет комплексов высокоточного оружия, "Военный парад", 1(37), 2000.
5. B.C.Фимушкин. Разработка воздушно-динамических рулевых приводов. Известия Тульского государственного университета. Серия "Вычислительная техника. Автоматика. Управление". Том 3. Выпуск 3. Управление. Тульский государственный университет. Тула, 2001, с.191-196.
6. Шипунов А.Г., Фимушкин B.C., Никаноров Б.А. Концепция разработки воздушно-динамических рулевых приводов ракет комплексов высокоточного оружия. Пневмогидроавтоматика-99, Всероссийская конференция. Тезисы докладов. Институт проблем управления им. В.А.Трапезникова. Москва, 1999, с.12-14.
7. Шипунов А.Г., Фимушкин B.C., Никаноров Б.А. Системный подход к проектированию, конструированию и экспериментальной отработке воздушно-динамических рулевых приводов. Известия Тульского государственного университета. Серия Проблемы специального машиностроения. Выпуск 2. Материалы региональной научно-технической конференции. Материалы докладов. "Проблемы проектирования и производства систем и комплексов". Тула, 1999, с.449-457.
8. Техническая кибернетика. Серия инженерных монографий под редакцией Солодовникова В.В. Теория автоматического регулирования. Книга 1. Математическое описание, анализ устойчивости и качества систем автоматического регулирования. М.: Машиностроение, 1967.
9. Политехнический словарь. Издание второе. Главный редактор А.Ю.Ишлинский. М.: Советская энциклопедия, 1980.
10. Гидравлические и пневматические силовые системы управления. Под ред. Дж.Блэкборн, Г.Ритхоф, Дж.Л.Шерер. М.: ИИЛ, 1962.
11. Нестационарный теплообмен. М.: Машиностроение, 1973. Авт.: В.К.Кошкин, Э.К.Калинин, Г.А.Дрейцер, С.А.Ярхо.
12. Гордов А.Н. Измерения температур газовых потоков. М. - Л.: Машгиз, 1962.
13. Алифанов О.М. Обратные задачи теплообмена. М.: Машиностроение, 1988.
14. Жукаускас А.А. Конвективный перенос в теплообменниках. М.: Наука, 1982.
15. Михеев М.А., Михеева И.М. Основы теплопередачи. М.: Энергия, 1977.
16. Краснощеков Е.А., Сукомел А.С. Задачник по теплопередаче. М.: Энергия, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2258898C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2000 |
|
RU2167390C1 |
| СПОСОБ ПРОВЕРКИ ФУНКЦИОНИРОВАНИЯ ВОЗДУШНО-ДИНАМИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМЫХ СНАРЯДОВ ИЛИ РАКЕТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218548C2 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ ВОЗДУШНО-ДИНАМИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2255299C1 |
| ЗЕНИТНАЯ РАКЕТА | 1999 |
|
RU2169341C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 1998 |
|
RU2133446C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2001 |
|
RU2191986C1 |
| СПОСОБ СТРЕЛЬБЫ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ И РАКЕТА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2191985C2 |
| СПОСОБ УВЕЛИЧЕНИЯ ДАЛЬНОСТИ ПОЛЕТА САМОНАВОДЯЩЕГОСЯ СНАРЯДА И САМОНАВОДЯЩИЙСЯ СНАРЯД | 2004 |
|
RU2265788C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2002 |
|
RU2219485C1 |
Изобретение относится к области вооружения. Гиперзвуковая управляемая ракета состоит из отделяемой стартовой ступени, маршевой ступени, содержащей головную часть с корпусом, в котором размещен воздушно-динамический рулевой привод с аэродинамическими органами управления, теплообменное устройство, головной обтекатель, в котором выполнен носовой воздухозаборник и внутренний продольный канал. Обтекатель выполнен из двух частей - носовой, являющейся воздухозаборником, и основной. Носовая часть обтекателя жестко закреплена с обеспечением герметичности в основной части обтекателя и снабжена внутри многоступенчатым, сквозным продольным отверстием для установки носовой части обтекателя, теплообменного устройства и крепления к корпусу маршевой ступени. Теплообменное устройство состоит из рассекателя газового потока с входным каналом, решеток, пучка прямых тонкостенных трубок, поджимающей гайки. При использовании изобретения обеспечивается возможность работы ракеты с воздушно-динамическим рулевым приводом в условиях кинетического нагрева элементов конструкции рулевого привода. 5 ил.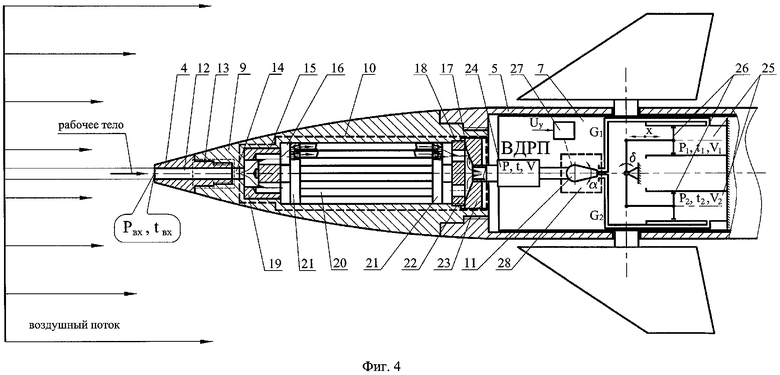
Гиперзвуковая управляемая ракета, состоящая из отделяемой стартовой ступени, маршевой ступени, содержащей головную часть с корпусом, в котором размещен воздушно-динамический рулевой привод с аэродинамическими органами управления и газовым распределительным устройством, теплообменное устройство, головной обтекатель, в котором выполнены носовой воздухозаборник и внутренний продольный канал, отличающаяся тем, что обтекатель выполнен из двух частей - носовой, являющейся воздухозаборником, и основной, воздухозаборник выполнен из интерметаллического сплава, при этом носовая часть обтекателя жестко закреплена с обеспечением герметичности в основной части обтекателя, которая выполнена из жаростойкой нержавеющей стали и с внутренним многоступенчатым сквозным продольным отверстием для установки носовой части обтекателя, теплообменного устройства и крепления к корпусу маршевой ступени, а теплообменное устройство состоит из рассекателя газового потока, который выполнен из жаростойкого интерметаллического сплава, с входным каналом, переходящим в несколько каналов меньшего диаметра, и решеток, выполненных из жаростойкой нержавеющей стали, в виде шайб с проточками и сквозными продольными отверстиями, пучка прямых тонкостенных трубок, установленных между решетками в их проточках вплотную друг к другу, поджимающей гайки с выполненными продольными отверстиями, герметично установленной пробки с коническим углублением на входе, соединенной посредством трубки с входом газового распределительного устройства рулевого привода.
| УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2258898C1 |
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1996 |
|
RU2101665C1 |
| US 4334478 А, 15.06.1982 | |||
| СПОСОБ СКРИНИНГА ЛЕКАРСТВЕННЫХ ПРЕПАРАТОВ | 1999 |
|
RU2150700C1 |
| JP 10170199 A, 26.06.1998. | |||

