Изобретение относится к электротехнике, а именно к способам управления импульсными преобразователями постоянного напряжения в автономных системах электроснабжения (СЭС).
Известен зонный принцип управления режимами работы комплексов автоматики и стабилизации (КАС) СЭС [1], который заключается в организации определенной последовательности работы основных регулирующих устройств КАС: зарядных устройств (ЗУ), разрядных устройств (РУ), стабилизатора напряжения (СН) солнечной батареи (СБ), за счет определения для каждого из этих устройств рабочей зоны в пределах допустимого диапазона изменения регулируемого параметра (в частном случае - выходного напряжения СЭС).
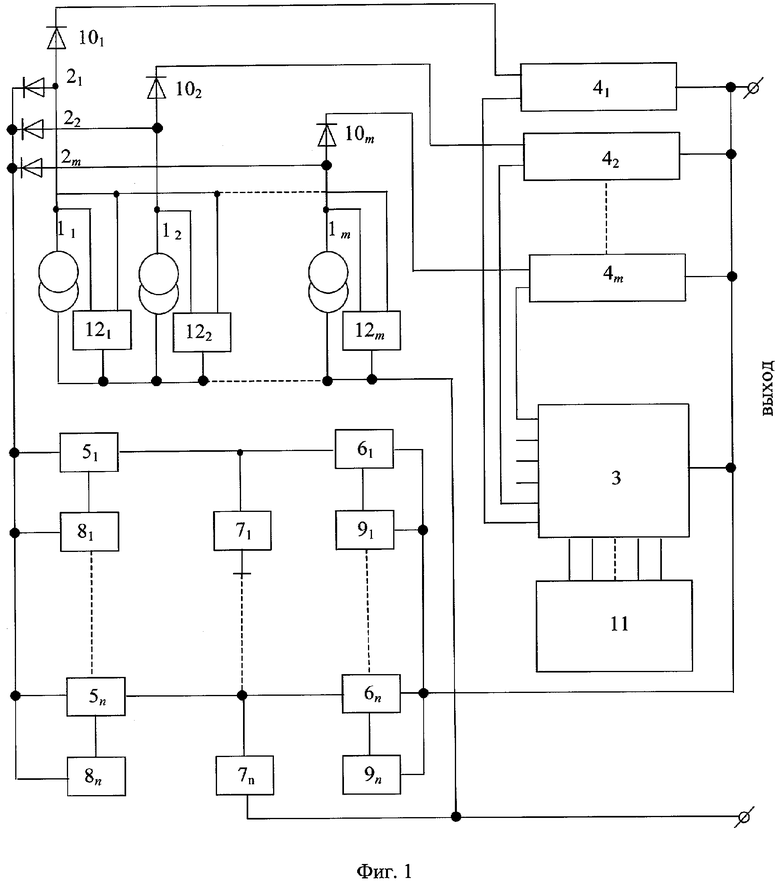
Известна автономная система электроснабжения [2], в которой для повышения надежности, снижения пульсаций выходного напряжения и потерь мощности СН разделен на m каналов 41...4m, по числу секций солнечной батареи 11...1m, причем каждый канал осуществляет регулирование энергии той секции СБ, которая подключена к его входу (фиг.1). Управление каналами осуществляет блок управления 3, имеющий m отдельных выходов, связанных с управляющими входами соответствующих каналов, и m входов, соединенных с m выходами источника напряжения смещения зон регулирования каналов СН 11.
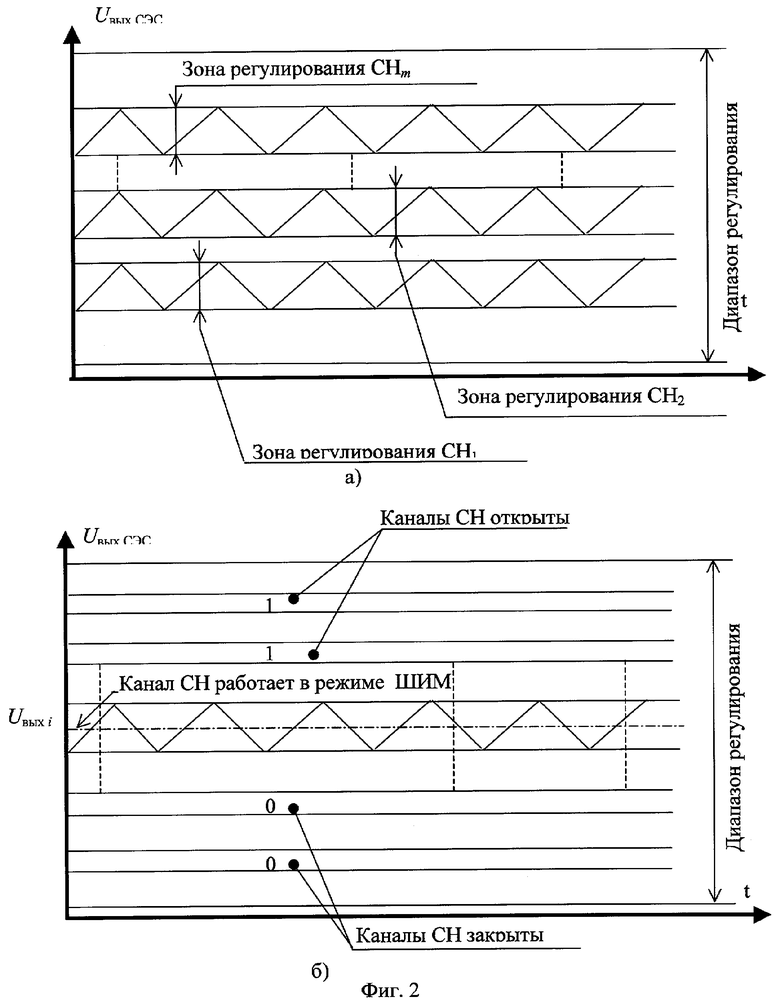
Источник напряжения смещения (ИНС) 11 вырабатывает на своих m выходах напряжения различной величины. Это напряжение с m-го выхода ИНС поступает на соответствующий вход блока управления 3 и смещает зону регулирования выходного напряжения соответствующим каналом СН. Номинальные значения напряжений смещения выбраны таким образом, чтобы обеспечить последовательную работу каналов СН (фиг.2а).
Блок управления СН 3 обеспечивает работу силовых ключей каналов СН в режиме широтно-импульсной модуляции. Управление каналами производится в соответствии с зонным принципом, в зависимости от выходного напряжения СЭС, поэтому при каждом значении выходного напряжения только один канал СН находится в режиме широтно-импульсной модуляции, а остальные в одном из двух состояний - полностью открытые (1) или полностью закрытые (0) силовые ключи (фиг.2б).
Целью изобретения является повышение статической точности регулирования выходного напряжения автономной СЭС за счет сужения диапазона регулирования измеряемого параметра.
Поставленная цель достигается введением динамического смещения зон регулирования каналов СН. При этом каждый канал СН представляет собой импульсный преобразователь напряжения с индивидуальным устройством управления. Устройство управления преобразователем выполнено на базе ШИМ с компенсацией статической ошибки регулирования выходного напряжения демодулированным сигналом управления [3]. Для организации режима работы СН с динамическим смещением зон регулирования в устройства управления вводятся специальные дополнительные цепи, а каналы СН соединяются перекрестными связями, в результате чего они образуют последовательную цепочку. Местоположение конкретного канала в этой цепочке определяется очередностью включения его в работу согласно логике функционирования СЭС. Структурно-функциональная схема управления СЭС с динамическим смещением зон регулирования показана на фиг.3.
СН состоит из m каналов КСН 1...КСН m, на вход каждого из которых поступает напряжение одной из m секций СБ UБС1...UБСm. Выходы всех каналов СН объединены на общей шине нагрузки.
Силовая часть каждого канала СН включает в себя регулирующий элемент (РЭ) 6, а также входной 5 и выходной 7 фильтры. Управление РЭ осуществляется широтно-модулированным (ШИМ) сигналом, формируемым компаратором 3. Кроме того, выход компаратора 3 связан с входами инвертора 8 и демодулятора ДМ2 10. Инвертированный сигнал компаратора 3 поступает на вход демодулятора ДМ1 9.
Сигнал с выхода демодулятора ДМ1 k-го канала СН (КСН k), нормированный по уровню усилителем 11, поступает на один из входов сумматора 1 этого канала, корректируя разницу напряжения обратной связи Uос и опорного напряжения Uоп, поступающих на другие входы сумматора 1. Выходные сигналы сумматора 1, усилителя 12, нормирующего сигнал демодулятора ДМ1, канала КСН(k+1) и усилителя 13, нормирующего сигнал демодулятора ДМ2, канала KCH(k-1) поступают на входы сумматора 2. Результат суммирования вместе с пилообразным напряжением, вырабатываемым генератором (ГПН) 4, используется компаратором 3 для формирования ШИМ-сигнала управления РЭ. В свою очередь, выходные сигналы демодуляторов ДМ1, ДМ2 канала КСН k, нормированные усилителями 12, 13, участвуют в формировании сигналов управления РЭ каналов КСН(k-1), КСН(k+1) соответственно, поступая на входы сумматоров 2 этих каналов.
При раздельной работе каждый канал СН стабилизирует выходное напряжение на уровне, определяемом источником опорного напряжения ИОН 14. Сигнал коррекции UДМ1-1, вырабатываемый демодулятором ДМ1, компенсирует составляющие статической ошибки стабилизации выходного напряжения, обусловленные факторами, действие которых приводит к изменению коэффициента заполнения ШИМ-сигнала.
Демодуляторы ДМ2 вырабатывают сигналы UДМ2, пропорциональные коэффициентам заполнения импульсов управления РЭ каналов КСН 1...КСН m. Эти сигналы используются для смещения в сторону повышения уровня регулирования канала СН, следующего в последовательной цепочке за тем, который регулирует выходное напряжение СЭС в данный момент времени. То есть канал, работающий в режиме ШИМ, принудительно увеличивает коэффициент заполнения импульсов управления РЭ канала, следующего за ним в последовательной цепочке. Если происходит уменьшение мощности нагрузки или увеличение мощности входных источников, подключенных к каналам с полностью открытыми РЭ, коэффициент заполнения импульсов управления канала, работающего в режиме ШИМ, а значит и сигнал смещения, уменьшается и, наконец, становится равным нулю. Это приводит к тому, что в режим ШИМ переходит следующий канал. В то же время на предыдущий канал начинает воздействовать сигнал UДМ1-2 демодулятора ДМ1, смещающий его уровень регулирования в сторону понижения, что дополнительно поддерживает полностью закрытое состояние его РЭ.
Таким образом, при изменении внешних воздействующих факторов осуществляется автоматическое подключение к выходу системы нужного количества входных источников энергии при автоматическом выборе регулирующего канала. При этом нет необходимости в разделении допустимого диапазона изменения выходного напряжения на зоны регулирования, то есть преобразователи всех каналов настраиваются на один уровень стабилизируемого напряжения.
Рассмотрим более подробно процесс перехода режима ШИМ с одного преобразователя (канала СН) на другой.
Сигнал управления на входе компаратора k-го преобразователя определяется выражением

где Uoc - сигнал обратной связи (напряжение на выходе СЭП);
 - напряжение UДМ1-1 демодулятора ДМ1 преобразователя k;
- напряжение UДМ1-1 демодулятора ДМ1 преобразователя k;
 - напряжение UДМ1-2 демодулятора ДМ1 преобразователя (k+1);
- напряжение UДМ1-2 демодулятора ДМ1 преобразователя (k+1);
Uоп - опорное напряжение;
 - напряжение UДМ2 демодулятора ДМ2 преобразователя (k-1).
- напряжение UДМ2 демодулятора ДМ2 преобразователя (k-1).
Напряжения на выходах демодуляторов выражаются формулами



где Uк - амплитуда импульсов на выходе компараторов К;
 - коэффициент заполнения преобразователя k;
- коэффициент заполнения преобразователя k;
 - коэффициент передачи сигнала демодулятора ДМ1, предназначенного для коррекции статической ошибки;
- коэффициент передачи сигнала демодулятора ДМ1, предназначенного для коррекции статической ошибки;
 - коэффициент передачи сигналов демодуляторов ДМ1 и ДМ2, предназначенных для смещения уровней регулирования.
- коэффициент передачи сигналов демодуляторов ДМ1 и ДМ2, предназначенных для смещения уровней регулирования.
В [3] показано, что для полной компенсации статической ошибки коэффициент Kп1 должен быть равен

где Uпил - амплитуда напряжения пилообразной формы, вырабатываемого ГПН.
Для исключения перекрытия диапазонов регулирования соседних преобразователей сигнал смещения должен быть несколько больше Uпил, то есть

Величина ΔUпил определяет расстояние между уровнями регулирования, образующееся в результате их смещения, или "глубину" смещения.
Для первого преобразователя в последовательной цепочке (k=1)

Для второго преобразователя

или, с учетом (2)...(4),


При включении КАС (или при переходе из режима РУ в режим СН) в первый момент РЭ всех каналов СН полностью открыты, при этом коэффициенты заполнения импульсов Кз всех преобразователей равны 1, то есть


Из выражения (12) видно, что в исходном состоянии на второй канал действует сигнал, смещающий его опорное напряжение в сторону увеличения, что означает включение в работу второго канала при более высоком напряжении обратной связи.
Выражения (11), (12) справедливы до момента, пока Uoc не станет равным Uоп. Далее, когда 


Последнее слагаемое в выражении (13) представляет собой сигнал коррекции, компенсирующий статическую ошибку регулирования напряжения. Выражение (14) показывает, что по мере приближения коэффициента заполнения преобразователя 1 к нулю сигнал смещения, воздействующий на преобразователь 2, уменьшается.
Граничный режим, когда РЭ преобразователя 1 уже полностью закрыт, а преобразователя 2 еще полностью открыт, характеризуется следующими управляющими сигналами:


Или, поскольку Uос=Uоп, и с учетом (5)

При дальнейшем уменьшении мощности нагрузки сигнал управления преобразователя 2 становится больше нуля, его ключи начинают работать с некоторой скважностью. При этом появляется сигнал его демодулятора ДМ1, дополнительно смещающий сигнал управления преобразователя 1 в область, соответствующую полностью закрытому состоянию его РЭ.
Статическая ошибка регулирования выходного напряжения при использовании принципа динамического смещения диапазонов определяется только настройкой точности стабилизации конкретных преобразователей, входящих в состав СН, главным образом, настройкой коэффициентов передачи их демодуляторов ДМ1 Kп1, отвечающих за компенсацию статической ошибки.
Источники информации
1. Зонный принцип управления режимами комплексов автоматики и стабилизации систем электроснабжения / С.А.Поляков, Л.Н.Ракова, А.И.Чернышев, В.О.Эльман // Системы автономного электроснабжения и электромеханические устройства. T.1. Аппаратура управления и преобразования энергии. - Сб. научных трудов НПО "Полюс". Томск. 1992. С.65-70.
2 Пат. №2156534 РФ, МПК7 Н02J 7/34, 7/35. Автономная система электроснабжения / Гордеев К.Г., Черданцев С.П., Шиняков Ю.А.; Научно-производственный центр «Полюс» // Бюл. №26. 2000.
3 Пат. №2254606 РФ, МПК7 G05F 1/56. Способ управления импульсным стабилизатором постоянного напряжения / Гордеев К.Г., Черданцев С.П., Шиняков Ю.А.; Федеральное государственное унитарное предприятие «Научно-производственный центр «Полюс» // Бюл. №17. 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 1998 |
|
RU2156534C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2003 |
|
RU2249842C2 |
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПЕРЕДАЧИ ЛОГИЧЕСКИХ ДАННЫХ ПО ОДНОПРОВОДНОЙ ЛИНИИ СВЯЗИ | 2001 |
|
RU2206922C2 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2007 |
|
RU2339993C1 |
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ | 1998 |
|
RU2152069C1 |
| Автономная гибридная энергоустановка | 2022 |
|
RU2792410C1 |
| Преобразователь с выходным переменным напряжением заданной формы | 1990 |
|
SU1812606A1 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2007 |
|
RU2337393C1 |
| Система электроснабжения постоянным напряжением | 1990 |
|
SU1784955A1 |
| Ключевой стабилизатор напряжения с трансформаторной развязкой | 2023 |
|
RU2814894C1 |
Способ управления импульсными преобразователями напряжения может быть использован в автономных системах электроснабжения (СЭС). Широко применяется зонный принцип управления преобразователями СЭС, когда последовательная работа силовых устройств обеспечивается за счет разделения допустимого диапазона изменения регулируемого параметра на рабочие зоны, определенные для каждого устройства. Предлагаемый способ управления обеспечивает последовательную работу силовых устройств организацией взаимного воздействия устройств управления преобразователями, которые согласно логике функционирования СЭС должны работать последовательно. Сигналы, осуществляющие это воздействие, получают путем демодуляции прямого и инверсного широтно-модулированных сигналов управления преобразователями. При этом демодулированные прямой и инверсный сигналы управления k-м преобразователем смещают соответственно уровень регулирования (k+1)-го преобразователя в сторону повышения, а уровень регулирования (k-1)-го преобразователя - в сторону понижения. Статическая точность регулирования при таком способе управления повышается, поскольку все входящие в состав СЭС устройства работают в пределах одной зоны в заданной последовательности. Технический результат - повышение статической точности регулирования. 3 ил.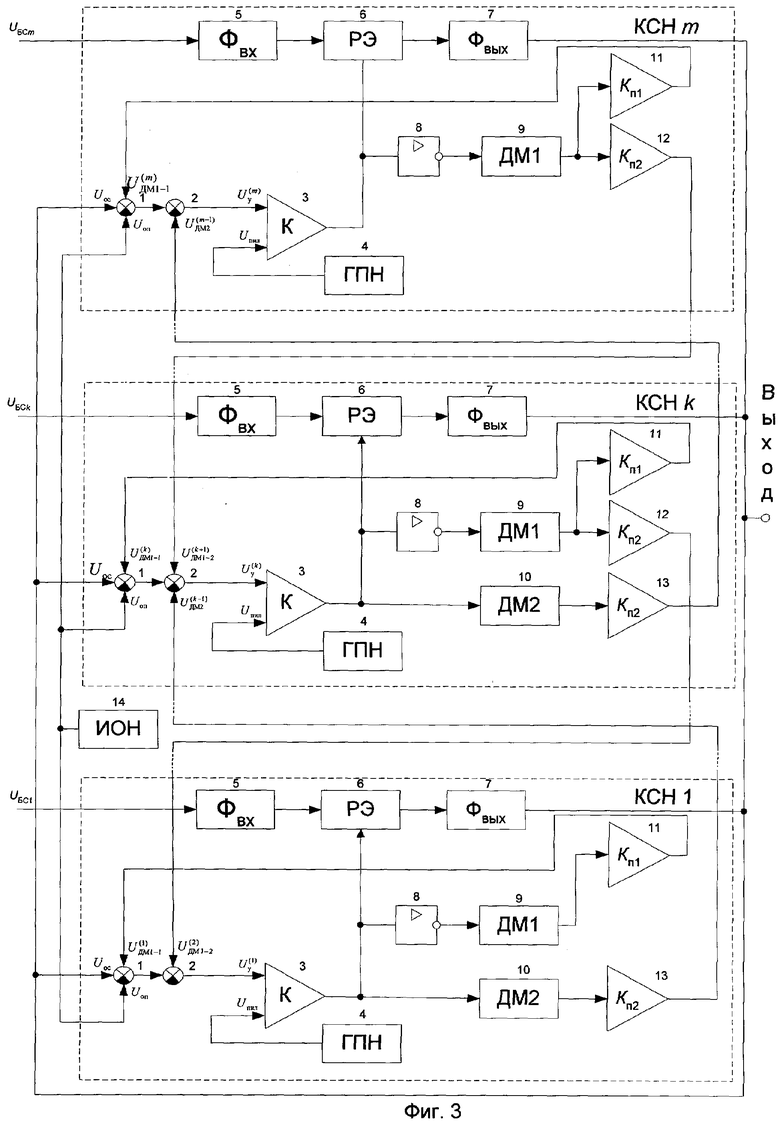
Способ управления импульсными преобразователями напряжения в автономной системе электроснабжения с секционированной солнечной батареей и отдельным преобразователем напряжения для каждой из m секций, при котором обеспечивают работу регулирующего элемента преобразователя напряжения одной секции солнечной батареи в режиме широтно-импульсного модулирования, а регулирующих элементов остальных преобразователей - в полностью открытом или закрытом состоянии, в каждом преобразователе измеряют текущее значение стабилизируемого выходного напряжения системы электроснабжения, сравнивают измеренное значение с постоянным опорным напряжением, общим для всех преобразователей, на основе полученного сигнала рассогласования и напряжения пилообразной формы формируют широтно-импульсный сигнал управления регулирующим элементом, который инвертируют, демодулируют и суммируют с сигналом рассогласования, отличающийся тем, что преобразователь, работающий в данный момент в режиме широтно-импульсного модулирования, выбирается автоматически за счет того, что с сигналом рассогласования k-го (1≤k≤m) преобразователя суммируют сигнал разности между демодулированным инверсным широтно-импульсным сигналом управления регулирующим элементом (k+1)-го преобразователя и демодулированным широтно-импульсным сигналом управления регулирующим элементом (k-1)-го преобразователя.
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 1998 |
|
RU2156534C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2003 |
|
RU2254606C2 |
| GB 2324310 A, 14.10.1998. | |||

