Изобретение относится к электротехнике, а именно к способам управления импульсными преобразователями постоянного напряжения.
Известен способ управления импульсным стабилизатором постоянного напряжения, основанный на широтно-импульсной модуляции сигнала управления регулирующим элементом, заключающийся в том, что сравнивают текущее значение стабилизируемого напряжения с постоянным опорным напряжением, на основе усиленного сигнала рассогласования с помощью напряжения пилообразной формы формируют ШИМ-сигнал управления регулирующим элементом (силовыми ключами) [1, с.25; 2, с. 89].
Импульсные преобразователи, управляемые таким способом, характеризуются наличием статической ошибки стабилизации напряжения, определяемой амплитудой напряжения пилообразной формы и коэффициентом усиления усилителя сигнала рассогласования.
Предлагаемое изобретение решает задачу уменьшения статической ошибки стабилизации напряжения.
Согласно предлагаемому способу указанная задача решается следующим образом.
Для управления импульсным стабилизатором постоянного напряжения измеряют текущее значение стабилизируемого напряжения, сравнивают измеренное значение с постоянным опорным напряжением, с помощью полученного сигнала рассогласования и напряжения пилообразной формы формируют ШИМ-сигнал управления регулирующим элементом стабилизатора. С сигналом рассогласования суммируют сигнал коррекции, полученный в результате демодуляции ШИМ-сигнала управления регулирующим элементом. Причем коэффициент передачи сигнала коррекции выбирают, исходя из требуемой статической ошибки стабилизации напряжения.
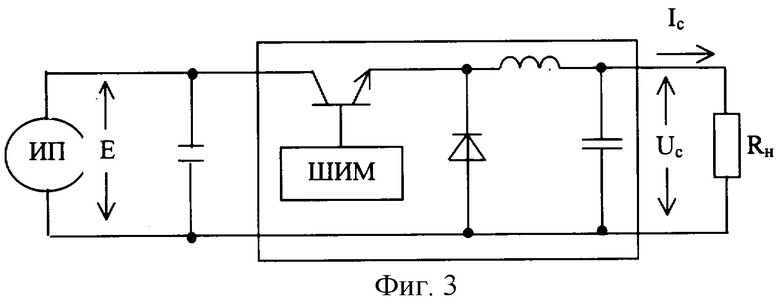
Пример структурно-функциональной схемы стабилизатора, в котором реализуется предлагаемый способ, приведен на фиг.1.
Силовая цепь стабилизатора включает в себя входной 1 и выходной 2 фильтры, а также регулирующий элемент 3. Устройство управления стабилизатора образуют первый 4 и второй 5 сумматоры, компаратор 6, генератор напряжения пилообразной формы 7, демодулятор 8.
На входы сумматора 4 подаются измеренное выходное напряжение стабилизатора Uс, которое необходимо стабилизировать, и постоянное опорное напряжение Uо, задающее требуемое значение стабилизируемого напряжения. Полученный сигнал рассогласования подается на один из входов сумматора 5, на второй вход которого подается преобразованный демодулятором 8 выходной ШИМ-сигнал компаратора 6, используемый для управления регулирующим элементом 3.
Формирование ШИМ-сигнала может происходить различным образом. В случае формирования ШИМ-сигнала с коэффициентом заполнения, определяемым по формуле
где Uпил. - амплитуда напряжения пилообразной формы;
Uу=(Uс-U0)+Uк(1-Кз)Kк, - напряжение управления на входе компаратора 6;
(Uс-U0) - сигнал рассогласования;
Uк(1-Kз)Kк - сигнал коррекции;
Uк - амплитуда импульсов на выходе компаратора 6;
Uк(1-Кз) - амплитуда демодулированного ШИМ-сигнала;
Кк - коэффициент передачи сигнала коррекции, после преобразований можно получить


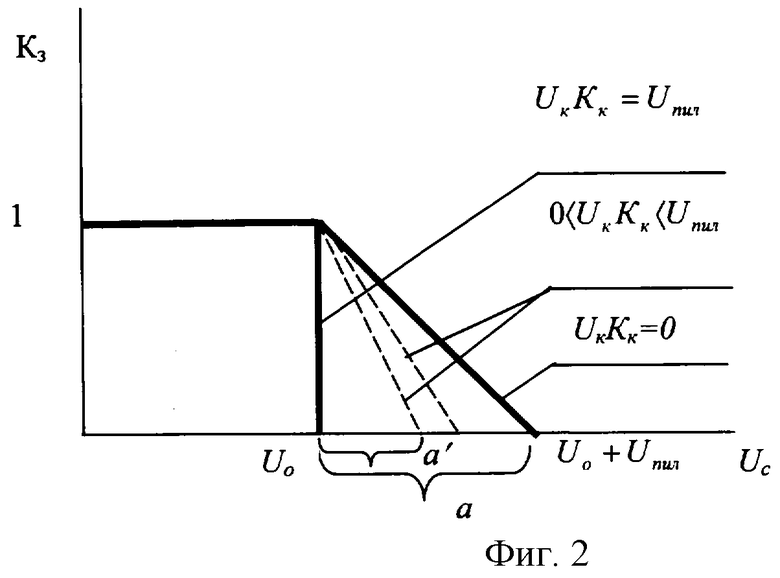
График зависимости Кз=f(Uc) приведен на фиг.2.
Отрезок а на фиг.2 представляет собой максимальную статическую ошибку стабилизации Uc при UкКк=0. Выбором коэффициента передачи сигнала коррекции можно уменьшить значение статической ошибки а′.
Из (3) очевидно, что при выборе коэффициента передачи равным

статическая ошибка равна нулю
Uc=U0.
Легко показать, что в случае формирования ШИМ-сигнала с коэффициентом заполнения, определяемым по формуле
где: Uу=(U0-Uс)+UкKзKк - напряжение управления;
(U0-Uс) - сигнал рассогласования;
Uk Кз Кк - сигнал коррекции;
Uк Kз - амплитуда демодулированного ШИМ-сигнала,
справедливы выражения
и

то есть при выборе Кк в соответствии с выражением (4) получаем аналогичный результат
Uс=U0.
В качестве примера рассмотрим стабилизатор напряжения понижающего типа с последовательным соединением регулирующего элемента и сглаживающего дросселя выходного фильтра (фиг.3), где ИП - источник питания с напряжением Е; Rн - сопротивление нагрузки; ρн=1/Rн - проводимость нагрузки.
Статическая регулировочная характеристика силовой части стабилизатора определяется равенством

где r0, - суммарное сопротивление силовой цепи стабилизатора, характеризующее неидеальность его элементов.
После несложных преобразований можно показать, что справедливы выражения:


Подставив (2) в (9), после преобразования получим:

где 
Отсюда при Kк=Uпил/Uк (т.е. при А=0) Uc=U0.
Таким образом, статическая ошибка стабилизации напряжения равна нулю.
В общем случае для импульсного стабилизатора любого типа имеется зависимость коэффициента заполнения от входного или выходного напряжения, мощности нагрузки Рн, индуктивности дросселя L или других параметров

Устройство управления стабилизатора формирует ШИМ-сигнал управления регулирующим элементом с коэффициентом заполнения, определяемым по уравнениям (2) или (6).
Приравняв правые части уравнений (9) и (2) или (6), получим


В случае выбора коэффициента передачи в соответствии с (4) получим А=0, Uc=U0, то есть стабилизируемое напряжение не зависит от параметров функции F.
Использование предлагаемого способа управления стабилизатором позволяет уменьшить статическую ошибку стабилизации напряжения. Выбирая коэффициент передачи демодулированного ШИМ-сигнала, можно корректировать величину статической ошибки. При коэффициенте передачи  статическая ошибка равна нулю при воздействии различных дестабилизирующих факторов (изменение Е, ρн, r0 ...).
статическая ошибка равна нулю при воздействии различных дестабилизирующих факторов (изменение Е, ρн, r0 ...).
Данный способ управления эффективен для различных вариантов преобразователей постоянного напряжения (понижающего, повышающего и инвертирующего типов) и различных режимов их работы (как при безразрывных, так и при разрывных токах дросселя стабилизатора).
ИСТОЧНИКИ ИНФОРМАЦИИ, ПРИНЯТЫЕ ВО ВНИМАНИЕ ПРИ СОСТАВЛЕНИИ ОПИСАНИЯ
1 Хусаинов Ч.И. Высокочастотные импульсные стабилизаторы постоянного напряжения. М.: Энергия, 1980.
2 Сергеев Б.С. Схемотехника функциональных узлов источников вторичного электропитания: Справочник. М.: Радио и связь, 1992.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2003 |
|
RU2249842C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ СЕКЦИОНИРОВАННОЙ СОЛНЕЧНОЙ БАТАРЕИ В АВТОНОМНОЙ СИСТЕМЕ ЭЛЕКТРОСНАБЖЕНИЯ | 2006 |
|
RU2308797C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2014 |
|
RU2571768C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2451322C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2011 |
|
RU2460114C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1376069A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 1988 |
|
RU2025764C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
Способ, основанный на широтно-импульсной модуляции сигнала управления регулирующим элементом, может быть использован для управления импульсными полупроводниковыми стабилизаторами постоянного напряжения. Технический результат - уменьшение статической ошибки стабилизации напряжения при внешних возмущениях (изменение входного напряжения или сопротивления нагрузки, влияние неидеальности элементов силовой цепи стабилизатора). Для управления импульсным стабилизатором постоянного напряжения измеряют текущее значение стабилизируемого напряжения, сравнивают измеренное значение с постоянным опорным напряжением, на основе сигнала рассогласования с помощью синхронизирующего напряжения пилообразной формы формируют ШИМ-сигнал, используемый для управления регулирующим элементом стабилизатора. Кроме того, этот сигнал демодулируют и полученный сигнал коррекции суммируют с сигналом рассогласования. Выбирая коэффициент передачи сигнала коррекции, исправляют величину статической ошибки стабилизации напряжения. Выбрав коэффициент передачи соответствующим образом, можно обеспечить равенство статической ошибки нулю. Данный способ управления эффективен для различных вариантов преобразователей постоянного напряжения (понижающего, повышающего и инвертирующего типов) и различных режимов их работы (как при безразрывных, так и при разрывных токах дросселя стабилизатора). 3 ил.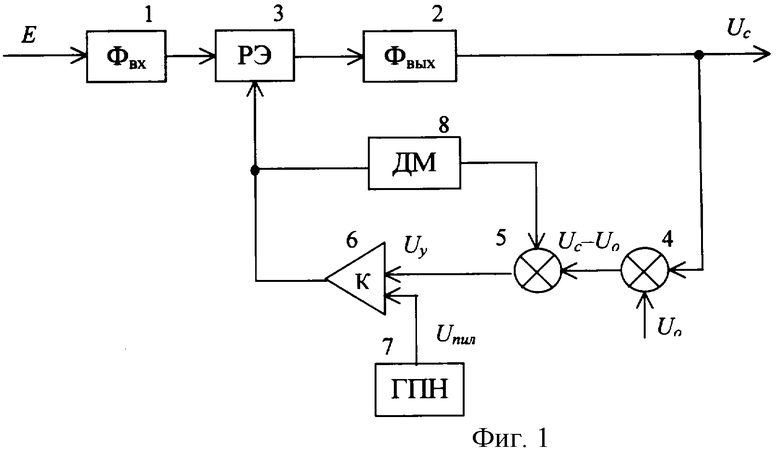
Способ управления импульсным стабилизатором постоянного напряжения, основанный на широтно-импульсной модуляции сигнала управления регулирующим элементом, заключающийся в том, что измеряют текущее значение стабилизируемого напряжения, сравнивают измеренное значение с постоянным опорным напряжением, на основе полученного сигнала рассогласования и напряжения пилообразной формы формируют ШИМ-сигнал управления регулирующим элементом импульсного стабилизатора, отличающийся тем, что c сигналом рассогласования суммируют сигнал коррекции, полученный в результате демодуляции ШИМ-сигнала управления регулирующим элементом, при этом коэффициент передачи сигнала коррекции выбирают исходя из требуемой статической ошибки стабилизации напряжения.
| Однотактный стабилизированный преобразователь | 1980 |
|
SU924806A1 |
| Однотактный преобразователь постоянного напряжения | 1987 |
|
SU1457114A1 |
| ОПТИЧЕСКИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2324210C1 |
| СПОСОБ ПЕРЕДАЧИ ГОЛОСОВЫХ ДАННЫХ В ЦИФРОВОЙ СИСТЕМЕ РАДИОСВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2301492C2 |

