Изобретение относится к технике защиты транспортных средств (ТС) от несанкционированного пользования.
В настоящее время в литературе широко описаны системы тревожной сигнализации ТС (СТС ТС), сигнализирующие о проникновении злоумышленника в охраняемое ТС, но не препятствующие пользованию злоумышленником ТС. К СТС ТС относится, в частности, устройство по патенту US №4777468, В60R 25/00, содержащее генератор частоты и селективный частотный фильтр, связанные между собой через кабельную бортовую сеть, датчики несанкционированного пользования ТС, выходы которых подключены к пусковым входам генераторов, узел тревожной сигнализации, управляющий вход которого соединен с выходом упомянутого фильтра.
Для СТС ТС характерна высокая вероятность угона, поскольку они рассчитаны только на "отпугивание" случайных угонщиков.
Значительно уменьшена вероятность угона в охранно-противоугонных системах, содержащих узлы блокирования функциональных органов ТС, например иммобилайзер, позволяющий блокировать движение угоняемого ТС путем запрета запуска его двигателя. Примером такой охранно-противоугонной системы является система по патенту SU №1544613, В60R 25/04, содержащая связанные через кабельную бортовую сеть центральный узел управления, датчики несанкционированного пользования ТС, узлы тревожной сигнализации и узлы блокирования дверей и функциональных органов ТС, узел задания режима, связанный с пусковым входом центрального узла управления, сигнальный вход которого связан с выходами датчиков и узлов блокирования, а выходы - с управляющими входами датчиков, узлов тревожной сигнализации и узлов блокирования.
Однако такие системы позволяют злоумышленнику легко идентифицировать узлы блокирования функциональных органов ТС для их замены и последующего угона ТС. Узлы блокирования функциональных органов ТС, как правило, идентифицируются визуально - по наличию подключенных к ним избыточных проводов. Маскировка избыточных проводов (путем объединения группы проводов в кабель, похожий на одиночный провод) не вызывает у угонщика особых трудностей: кабели, заменяющие несколько проводов, легко определяются по толщине. То есть такие системы защищают ТС только от малоопытных угонщиков. Опытный "профессионал" может угнать ТС через 3-4 минуты после начала визуального осмотра сети электропитания. По этой причине упомянутые выше системы применяются лишь в самых дешевых ТС.
От указанного недостатка свободно противоугонное устройство для ТС по патенту RU №2090395, В60R 25/00, содержащее процессорный блок обработки поступающей информации и синтеза команд, первый вход которого подключен к шине питания через замок зажигания, а первый выход и второй вход соединены с возможностью запроса и считывания кода разблокирования соответственно со входом и выходом узла задания режима, включающего в себя связанные радиоканалом электронную метку и приемник, второй выход процессорного блока обработки поступающей информации и синтеза команд через канал связи соединен со входами узлов блокирования функциональных органов ТС, каждый из которых имеет подключенное контактными группами к функциональному органу ТС реле и последовательно включенные блок согласования с каналом связи и декодер, при этом входы напряжения питания каждого узла блокирования функциональных органов ТС соединены с первым входом процессорного блока обработки поступающей информации и синтеза команд.
При использовании данного противоугонного устройства угонщик не имеет возможности для визуального определения узлов блокирования функциональных органов ТС (с целью их замены и последующего угона ТС). Однако простая "прозвонка" контактов при включенном и отключенном зажигании позволяет угонщику отделить узлы блокирования функциональных органов ТС противоугонного устройства от узлов управления функциональными органами ТС. Безусловно, времени на проверку замыкания или размыкания контактов реле при включении и отключении зажигания необходимо существенно больше, чем при визуальной идентификации. Но результат все же может быть достигнут. Следовательно, угон все-таки остается возможным.
Снижение вероятности угона ТС путем полного исключения возможности как визуальной, так и электрической идентификации узлов блокирования функциональных органов обеспечивается в противоугонном устройстве для ТС по патенту RU №2160196, В60R 25/00. Это противоугонное устройство для ТС содержит процессорный блок обработки поступающей информации и синтеза команд, первый вход которого подключен к шине питания через замок зажигания, а первый выход и второй вход соединены с возможностью запроса и считывания кода разблокирования соответственно со входом и выходом узла задания режима, включающего в себя связанные радиоканалом электронную метку и приемник, второй выход процессорного блока обработки поступающей информации и синтеза команд через канал связи соединен со входами узлов блокирования функциональных органов ТС, каждый из которых имеет подключенное контактными группами к функциональному органу ТС реле и последовательно включенные блок согласования с каналом связи и декодер. При этом входы напряжения питания каждого узла блокирования функциональных органов ТС соединены с первым входом процессорного блока обработки поступающей информации и синтеза команд, узлы блокирования функциональных органов ТС содержат элемент задержки и датчик движения, а в каждый узел блокирования введен элемент памяти, причем первый вход элемента памяти подключен к выходу декодера, второй вход соединен с выходом датчика движения, третий вход через элемент задержки соединен с первым входом процессорного блока обработки поступающей информации и синтеза команд, а выход подключен ко входу управления реле.
Высокий уровень защиты ТС в описанном выше противоугонном устройстве для ТС достигается путем применения в узлах блокирования функциональных органов ТС двух типов дистанционно управляемых реле, выпускаемых предприятием-заявителем под торговыми марками HOOK-UP® и WAIT UP® (журнал "12 Вольт", №1, 2002). Дистанционно управляемые реле обоих типов управляются по штатной бортовой сети питания ТС и выполнены в виде штатных автомобильных реле, поэтому визуально их обнаружить крайне сложно. Обозначение WAIT UP® (ВЭЙТ АП) защищено свидетельством на товарный знак RU №206899. Это новая противоугонная технология, разработанная на предприятии-заявителе и предназначенная для блокирования двигателя в момент начала несанкционированного движения ТС. До появления этой технологии противоугонные реле, установленные в разрыв электрической цепи, просто предотвращали несанкционированный запуск двигателя. В ранних версиях иммобилайзеров контакты в начальном положении реле были разомкнуты. Это позволяло злоумышленнику при помощи нехитрого диагностического оборудования найти разорванную цепь, замкнуть ее и запустить двигатель. На ТС, оснащенном дистанционно управляемыми реле WAIT UP и находящемся в неподвижном состоянии, все электрические цепи замкнуты. Дистанционно управляемое реле с размыкающими контактами размыкает электрическую цепь только тогда, когда угоняемое ТС трогается с места. Как только ТС остановится, контакты дистанционно управляемого реле с размыкающими контактами будут замыкаться и размыкаться синхронно с включением и выключением зажигания на ТС, поэтому отыскать блокировку будет невозможно даже при помощи специального диагностического оборудования. Это техническое решение удалось реализовать благодаря применению в дистанционно управляемом реле WAIT UP датчика движения фирмы Analog Devices, Inc. (США), реагирующего на любые перемещения ТС в горизонтальной плоскости.
Радиоэлектронная схема дистанционно управляемого реле WAIT UP спрятана в корпусе штатного автомобильного реле. Поэтому, если угонщик и сумеет открыть капот или салон ТС, то не найдет там никаких демаскирующих признаков противоугонного устройства.
Указанное техническое решение реализовано в серийно выпускаемых противоугонных системах BLACK BUG Plus модели BT-71W, в охранно-противоугонных комплексах BLACK BUG Super моделей BT-84W и BT-85W, а также в других аналогичных изделиях ("Каталог 2006. Автомобильные охранные системы", "Альтоника", выпуск №9, 2006).
Как показал опыт применения вышеупомянутых противоугонных систем и охранно-противоугонных комплексов, их основным недостатком является сложность монтажа, особенно при использовании большого количества внешних датчиков (концевых выключателей). Неудобен также и монтаж при установке противоугонной системы или охранно-противоугонного комплекса на ТС со сложным электронным оборудованием (например, на дорогостоящие автомобили зарубежного производства), когда может возникнуть проблема совместимости штатного и дополнительного электронного оборудования.
На устранение указанных недостатков вышеупомянутого аналога направлено техническое решение по патенту RU №2221711, В60R 25/00, представляющее собой противоугонное устройство для ТС, содержащее центральный блок управления, вход питания которого через выключатель зажигания подключен к плюсовому полюсу бортового источника питания, минусовой полюс которого подключен на массу ТС, выход и первый вход центрального блока управления соединены, с возможностью запроса и считывания кода разблокирования, соответственно со входом и выходом блока считывания данных, входящего в состав блока дистанционной идентификации пользователя, в состав которого входит также электронная метка, связанная по радиоэфиру с блоком считывания данных, N дистанционно управляемых реле HOOK-UP для блокирования функциональных органов ТС, каждое из которых содержит формирующую цепь из последовательно соединенных блока согласования и декодера, а также подключенное к выходу декодера управляемое реле, выход которого связан с соответствующим функциональных органом ТС, и М дистанционно управляемых реле WAIT UP для блокирования функциональных органов ТС, каждое из которых содержит вышеупомянутые формирующую цепь и управляемое реле, выход которого связан с соответствующим функциональным органом ТС, а вход подключен к выходу элемента памяти, а также элемент задержки, включенный между входом блока согласования и первым входом элемента памяти, второй и третий входы которого подключены к выходам соответственно декодера и датчика движения, а входы всех N+М блоков согласования соединены, с возможностью приема локального кода разблокирования, со входом питания центрального блока управления.
Описанное выше дистанционно управляемое реле WAIT UP для блокирования функциональных органов ТС является ближайшим аналогом настоящего изобретения. Недостатками ближайшего аналога являются:
- отсутствие реакции на действия злоумышленника, производимые им при выключенном зажигании, поскольку при этом все узлы противоугонной системы обесточены;
- отсутствие реакции на вертикальные перемещения ТС, открывающее возможность для кражи ТС путем транспортировки, например, на передвижной платформе автопогрузчика.
Кроме того, дистанционно управляемое реле WAIT UP не предназначено для выполнения функции тревожной сигнализации, что также является недостатком ближайшего аналога.
Заявляемое техническое решение направлено на устранение указанных выше недостатков ближайшего аналога.
Предметом изобретения является дистанционно управляемое реле для охранно-противоугонной системы ТС, связанное по штатной бортовой сети питания с центральным блоком управления и содержащее блок датчиков движения с датчиком горизонтального движения на базе двухкоординатного акселерометра, элемент задержки, вход которого через шину питания и выключатель зажигания подключен к бортовому аккумулятору, электромеханическое реле, контактная группа которого предназначена для подключения к функциональным органам ТС, и последовательно соединенные блок согласования и декодер, - при этом в него введены микропроцессор и автономный блок питания и управления, вход которого подключен к шине питания, первый выход - к первому управляющему входу микропроцессора, а второй выход соединен со входом питания микропроцессора и через обмотку реле - с функциональным входом микропроцессора, блок датчиков движения снабжен датчиком вертикального движения на базе однокоординатного акселерометра, при этом блок согласования и декодер установлены в автономном блоке питания и управления, первый и второй сигнальные входы микропроцессора подключены соответственно к первому и второму координатным выходам датчика горизонтального движения, третий сигнальный вход - к выходу датчика вертикального движения, а второй управляющий вход - к выходу элемента задержки, при этом контактная группа реле дополнительно предназначена для подключения к узлам тревожной сигнализации.
Частными существенными признаками изобретения являются следующие.
Автономный блок питания и управления содержит встроенный аккумулятор, подключенный к выходу зарядной цепи, информационный вход блока согласования соединен со входом зарядной цепи и является входом автономного блока питания и управления, входы питания блока согласования и декодера подключены к цепи питания, подсоединенной к встроенному аккумулятору и представляющей собой второй выход автономного блока питания и управления, первым выходом которого является выход декодера.
Автономный блок питания и управления содержит встроенный аккумулятор, подключенный к выходу зарядной цепи, а также схему переключения питания, при этом первый вход схемы переключения питания соединен со входом зарядной цепи и с информационным входом блока согласования и является входом автономного блока питания и управления, а второй вход схемы переключения питания соединен с выходом встроенного аккумулятора, входы питания блока согласования и декодера подключены к цепи питания, подсоединенной к выходу схемы переключения питания и представляющей собой второй выход автономного блока питания и управления, первым выходом которого является выход декодера.
Задачей изобретения является создание дистанционно управляемого реле для охранно-противоугонной системы ТС (представляющего собой дальнейшее развитие технологии WAIT UP), которое должно реализовать наряду с противоугонной функцией функцию СТС ТС, причем не только при горизонтальных, но и при вертикальных перемещениях ТС, например, при попытках его принудительной погрузки для последующей транспортировки на передвижной платформе. При этом должны сохраняться все преимущества существующего серийно выпускаемого дистанционно управляемого реле WAIT UP - скрытность установки и уникальные противоугонные возможности.
Обеспечиваемый технический результат заключается в обеспечении возможности подачи тревожных сигналов (звуковых, световых или передаваемых по радиосвязи) при любых видах перемещений ТС, независимо от того, включена или выключена система зажигания.
Суть изобретения поясняется на фиг.1 - 3.
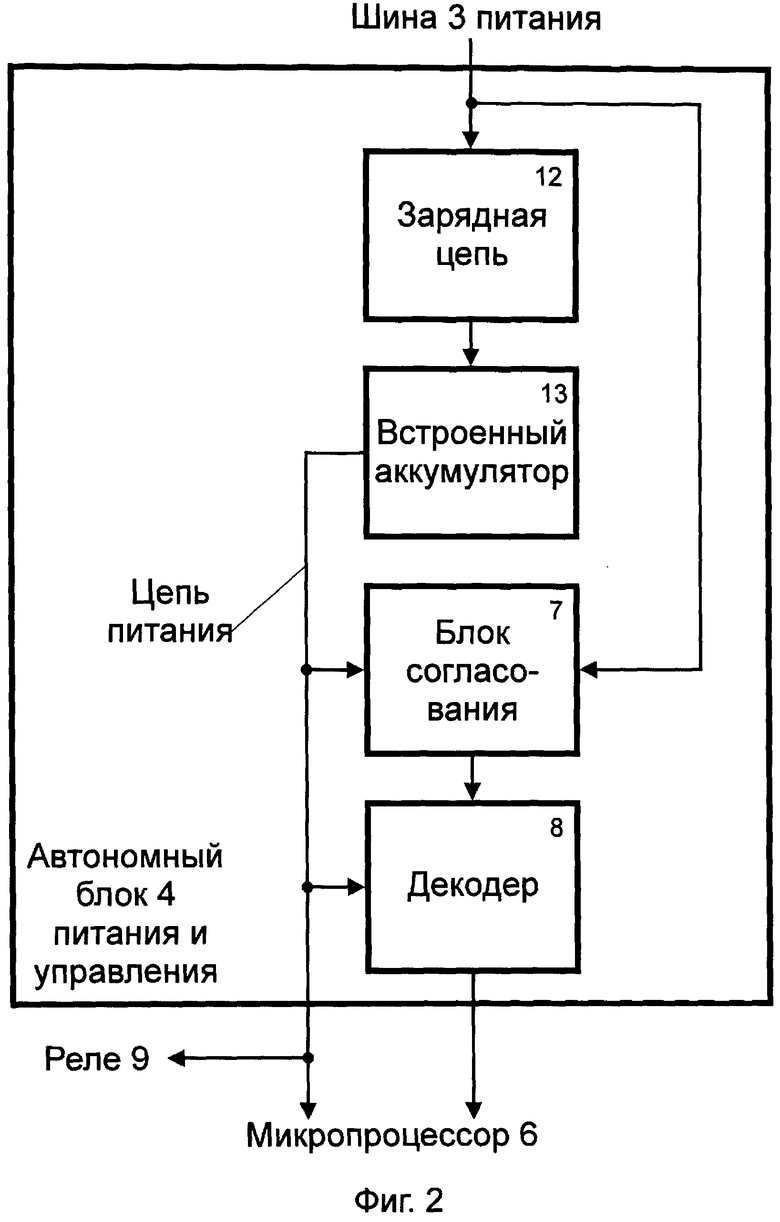
На фиг.1 показана структурная схема рассматриваемого дистанционно управляемого реле для охранно-противоугонной системы ТС с указанием его подключения к составным частям охранно-противоугонной системы ТС.
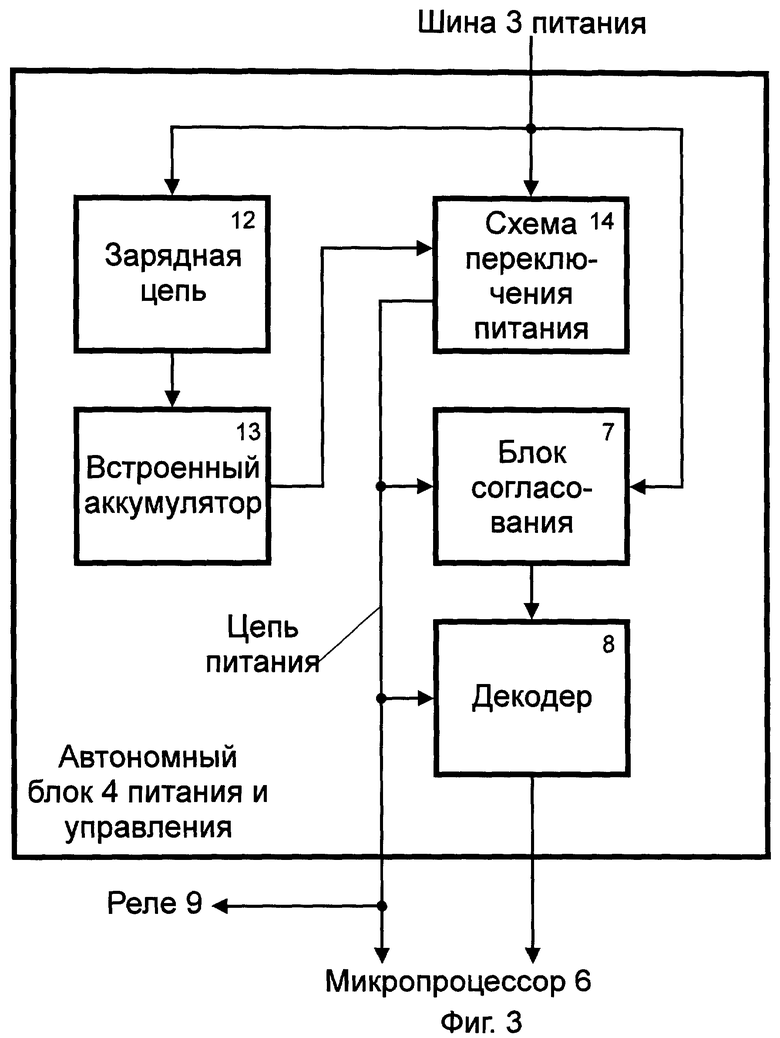
На фиг.2 представлен первый вариант структурной схемы автономного блока питания и управления.
На фиг.3 представлен второй вариант структурной схемы автономного блока питания и управления.
На фиг.1 - 3 использованы следующие обозначения: 1 - выключатель зажигания; 2 - бортовой аккумулятор; 3 - шина питания; 4 - автономный блок питания и управления; 5 - элемент задержки; 6 - микропроцессор; 7 - блок согласования; 8 - декодер; 9 - реле; 10 - датчик горизонтального движения; 11 - датчик вертикального движения; 12 - зарядная цепь; 13 - встроенный аккумулятор; 14 - схема переключения питания.
Рассматриваемое дистанционно управляемое реле для охранно-противоугонной системы ТС (фиг.1) содержит блок датчиков движения в составе датчика 10 горизонтального движения на базе двухкоординатного акселерометра и датчика 11 вертикального движения на базе однокоординатного акселерометра. Кроме того, в состав дистанционно управляемого реле входит элемент 5 задержки, вход которого через шину 3 питания и выключатель 1 зажигания подключен к бортовому аккумулятору 2. Контактами дистанционно управляемого реле служат контакты реле 9 (электромеханического реле, выполненного с возможностью подключения его контактов к функциональным органам ТС и к узлам тревожной сигнализации). В состав дистанционно управляемого реле входят также микропроцессор 6 и автономный блок 4 питания и управления, вход которого подключен к шине 3 питания, первый выход - к первому входу управления микропроцессора 6, а второй выход - ко входу питания микропроцессора 6 и через обмотку реле 9 к функциональному входу микропроцессора 6. Первый и второй сигнальные входы микропроцессора 6 подключены соответственно к первому и второму координатным выходам датчика 10 горизонтального движения, а третий сигнальный вход микропроцессора 6 - к выходу датчика 11 вертикального движения. Второй управляющий вход микропроцессора 6 подключен к выходу элемента 5 задержки.
В первом варианте построения (фиг.2) автономный блок 4 питания и управления содержит встроенный аккумулятор 13, подключенный к выходу зарядной цепи 12, а также последовательно соединенные блок 7 согласования, информационный вход которого соединен со входом зарядной цепи 12 и является входом автономного блока 4 питания и управления, и декодер 8, выход которого является первым выходом автономного блока 4 питания и управления, при этом входы питания блока 7 согласования и декодера 8 подключены к цепи питания, вход которой подсоединен к встроенному аккумулятору 13, а выход является вторым выходом автономного блока 4 питания и управления.
Во втором варианте построения (фиг.3) автономный блок 4 питания и управления содержит встроенный аккумулятор 13, подключенный к зарядной цепи 12, а также схему 14 переключения питания, первый вход которой соединен со входом зарядной цепи 12 и с информационным входом блока согласования и является входом автономного блока 4 питания и управления, а второй вход подключен к выходу встроенного аккумулятора 13. Входы питания блока 7 согласования и декодера 8 подключены к цепи питания, которая подсоединена к выходу схемы 14 переключения питания и является вторым выходом автономного блока 4 питания и управления, первым выходом которого является выход декодера 8.
Связь центрального блока управления с составными частями рассматриваемого дистанционно управляемого реле осуществляется по шине 3 питания, а передаваемые по ней данные представляют собой частотно-модулированные сигналы. Метод передачи данных по проводам бортовой шины 3 питания широко известен и описан в патентно-технической технической литературе (например, в ранее полученном предприятием-заявителем патенте RU №2090395, В60R 25/00).
Примерами функциональных органов, к которым могут быть подключены контакты реле 9 (для блокирования движения ТС), являются бензонасос, датчик положения коленвала и другие аналогичные функциональные органы.
Датчики горизонтального 10 и вертикального 11 движения представляют собой акселерометры с интегратором и формирующей схемой, довольно часто применяемые в электрооборудовании ТС. Они определяют наличие движения ТС и формируют на своих выходах разрешающий сигнал только при наличии движения ТС. При испытаниях заявляемого дистанционно управляемого реле в качестве блока датчиков движения была использована стандартная микросхема серии ADXL производства фирмы Analog Devices, Inc. (США), содержащая трехкоординатный акселерометр (одновременно выполняющий функции как двухкоррдинатного, так и однокоординатного акселерометров). В качестве микропроцессора 6 может быть использована, например, микросхема ATMEGA 8 фирмы ATMEL.
В качестве реле 9 может быть использовано электромеханическое реле, входящее в состав дистанционно управляемых реле HOOK-UP и WAIT UP, серийно выпускаемых предприятием-заявителем ("Каталог 2006, Автомобильные охранные системы", "Альтоника", выпуск 9, 2006, с.38, 39).
Цепь, состоящая из последовательно соединенных блока 7 согласования, декодера 8 и микропроцессора 6, функциональный вход которого подключен к обмотке реле 9, реализует технологию HOOK-UP - способ управления узлами охранно-противоугонной системы по штатной шине электропитания. Применение этого способа для охраны ТС было предложено предприятием-заявителем в 1996 году (патент RU №96114269, В60R 25/00). Данное техническое решение получило широкое распространение и, в частности, было реализовано в семействе охранно-противоугонных систем, серийно выпускаемых предприятием-заявителем под торговыми марками BLACK BUG® (свидетельство №158593) и REEF® (свидетельство №182300). Совмещение канала передачи управляющих сигналов с шиной 3 питания позволило упростить монтаж (требуется меньше проводов), а главное, повысить скрытность установки дополнительного оборудования в ТС.
Что касается таких блоков или их составных частей, как выключатель 1 зажигания, бортовой аккумулятор 2, встроенный аккумулятор 13, зарядная цепь 12, схема 14 переключения питания, то это - обычные электротехнические узлы, широко используемые в бытовой технике.
Конструкция предлагаемого дистанционно управляемого реле совпадает с конструкцией стандартных узлов управления функциональными органами ТС (например, штатных автомобильных реле). При этом элемент 5 задержки и блок датчиков движения, не требующие для своего исполнения конструктивов с большими габаритами и массой, могут быть встроены в корпус любого серийно выпускаемого дистанционно управляемого реле типа HOOK-UP или WAIT UP.
Таким образом, все применяемые в предлагаемом дистанционно управляемом реле функциональные узлы хорошо известны, выпускаются серийно и доступны для коммерческого использования. Поэтому возможность практической реализации предлагаемого технического решения не вызывает сомнений.
Рассматриваемое дистанционно управляемое реле для охранно-противоугонной системы ТС работает следующим образом.
Рассмотрим вначале работу дистанционно управляемого реле (фиг.1) после включения зажигания ТС. При включении зажигания в ТС происходит замыкание контактов выключателя 1 зажигания и через выключатель 1 зажигания напряжение питания от бортового аккумулятора 2 поступает на шину 3 питания. По шине 3 питания напряжение питания от бортового аккумулятора 2 поступает на автономный блок 4 питания и управления. Напряжение питания от бортового аккумулятора 2 подается также на элемент 5 задержки. Однако напряжение на выходе элемента 5 задержки при этом не меняется. Сигнал, вызванный появлением напряжения питания, формируется на выходе элемента 5 задержки только спустя промежуток времени А задержки элемента 5 задержки.
При включении зажигания ТС напряжение питания от бортового аккумулятора 2 поступает и в другие блоки охранно-противоугонной системы, в частности в центральный блок управления. Одной из задач центрального блока управления является идентификация того лица, кем осуществлено включение зажигания ТС: пользователем ТС (которому пользование данным ТС официально дозволено) или злоумышленником, который собирается украсть или угнать данное ТС. Методов идентификации известно достаточно много, и они не относятся к предмету настоящего изобретения.
По отношению к рассматриваемому в материалах настоящего изобретения дистанционно управляемому реле существенным является только то, что после опознавания пользователя центральный блок управления формирует на шине 3 питания высокочастотный локальный код разблокирования. Если же опознавания пользователя не было, то формирования локального кода разблокирования не происходит. Задержка между подачей напряжения питания на вход элемента 5 задержки и появлением сигнала на выходе элемента 5 задержки должна быть достаточной для опознавания пользователя, приема по шине 3 питания локального кода разблокирования из центрального блока управления, преобразования его в требуемый формат в блоке 7 согласования и декодере 8 и срабатывания декодера 8 (в том случае, если локальный код разблокирования совпадает с эталонным кодом разблокирования). То есть, если выключатель 1 зажигания замыкает пользователь, то за время задержки сигнала элементом 5 задержки пользователь ТС опознается (например, по наличию у него электронной метки) и декодер 8 формирует на своем выходе разрешающий сигнал, подаваемый на первый управляющий вход микропроцессора 6. При этом питание микропроцессора 6 осуществляется постоянно (по его входу питания, соединенному со вторым выходом автономного блока 4 питания и управления).
В момент окончания задержки Δ на втором управляющем входе микропроцессора 6 проходит передний фронт сигнала управления (с выхода элемента 5 задержки). По этому фронту в микропроцессоре 6 запоминается результат ТП идентификации пользователя. Этот результат сохраняется вплоть до следующего окончания задержки после очередного включения зажигания ТС. Будем условно считать, что Тп=1, если зажигание включено пользователем и Тп=0, если зажигание включено посторонним лицом, например угонщиком.
Простейшая схема, осуществляющая такое запоминание, может быть выполнена на введенном в состав микропроцессора 6 D-триггере со срабатыванием по переднему фронту тактового сигнала. В этом D-триггере информационный вход должен быть подключен в первому выходу автономного блока 4 питания и управления, а тактовый вход - к выходу элемента 5 задержки. Тогда параметр ТП будет формироваться на прямом выходе (Q) этого D-триггера.
Напряжение со второго выхода автономного блока 4 питания и управления через обмотку электромеханического реле 9 подключается к функциональному входу микропроцессора 6. Ток, проходящий через обмотку реле 9, определяется сопротивлением цепей микропроцессора 6, подключающих его функциональный вход к нулевому потенциалу.
Если это сопротивление существенно меньше сопротивления обмотки реле 9, то ток, проходящий через обмотку реле 9, достаточен для переключения контактов реле 9 из начального положения в конечное. Таким образом, реле 9 срабатывает: его замыкающие контакты замыкаются, а размыкающие - размыкаются.
Однако, если это сопротивление становится существенно большим сопротивления обмотки реле 9, то через обмотку реле 9 проходит малый ток. Срабатывания реле 9 не происходит, его замыкающие контакты остаются разомкнутыми, а размыкающие - замкнутыми.
Таким образом, по функциональному входу микропроцессора 6 осуществляется управление работой реле 9.
Заявляемое дистанционно управляемое реле имитирует работу штатного автомобильного реле, которое срабатывает только при включении зажигания. Если обозначить наличие включенного зажигания символами ПЗ, то срабатывание (СА) штатного автомобильного реле можно описать простейшей формулой:
СА=ПЗ
При срабатывании штатного автомобильного реле осуществляется разблокирование функциональных органов ТС. Пользование ТС становится возможным.
Но в заявляемом дистанционно управляемом реле такое срабатывание может быть запрещено, и функциональные органы ТС становятся заблокированными, что препятствует пользованию ТС.
Срабатывание (С) заявляемого дистанционно управляемого реле зависит от того, движется (Д) или не движется (NOT Д) ТС и может быть описано следующей формулой:
С=(ТП&ПЗ)OR(NOTД&ПЗ)OR(Д&NOTПЗ)
Формулу можно пояснить следующим образом. Если пользователь включал зажигание ТС как в рассматриваемом случае, так и в предыдущем случае, то ТП=1, и функциональные органы ТС разблокированы. Если зажигание включил угонщик, но перед этим зажигание включал пользователь, то в течение времени задержки Δ после включения зажигания ТП=1, и функциональные органы ТС будут разблокированы, а пользование ТС будет возможным. По окончании задержки Δ после включения зажигания пользователь не опознается и ТП становится равным 0. В дальнейшем пользование ТС будет зависеть от того, движется ТС или стоит на месте (то есть на стоянке или при временной остановке). При отсутствии движения (NOT Д) дистанционно управляемое реле срабатывает, и пользование ТС как бы становится возможным. Но как только ТС начинает движение (Д), срабатывание дистанционно управляемого реле прекращается, и сразу же включается блокировка. Поэтому угонщик по окончании времени задержки Δ после включения зажигания уже не может использовать ТС. Если же угонщик попробует выключить и потом снова включить зажигание ТС, то (поскольку ТП=0) блокировка будет срабатывать сразу же после повторного включения зажигания и начала движения ТС. То есть пользование ТС оказывается для угонщика невозможным (даже в течение времени задержки Δ после включения зажигания).
Однако ТС может быть угнано и путем буксировки или путем установки на передвижную платформу. В этом случае зажигание ТС не включено, но движение ТС может быть обнаружено. Если ТС движется при выключенном зажигании (Д & NOT ПЗ), то реле 9 также срабатывает.
Таким образом, срабатывание реле 9 определяется в том числе и сигналами (Д), формируемыми датчиками горизонтального 10 и вертикального 11 движения, входящими в состав блока датчиков движения. Указанные датчики содержат чувствительные к движению ТС элементы - соответственно двухкоординатный и однокоординатный акселерометры. Когда ТС находится в неподвижном состоянии, сигналы на выходах датчиков горизонтального 10 и вертикального 11 движения отсутствуют. При любых горизонтальных перемещениях ТС на первый и второй сигнальные входы микропроцессора 6 поступают соответственно сигналы с первого и второго координатных выходов датчика 10 горизонтального движения. Это происходит как при собственном движении ТС, так и при его буксировании. При вертикальных перемещениях ТС (например, при его подъеме на передвижную платформу) на выходе датчика 11 вертикального движения появляется сигнал, который подается на третий сигнальный вход микропроцессора 6.
То есть сигналы блока датчиков движения управляют срабатываниями реле 9.
Таким образом, в отличие от ближайшего аналога - серийно выпускаемого дистанционно управляемого реле WAIT UP, рассматриваемое дистанционно управляемое реле реагирует не только на горизонтальные, но и на вертикальные перемещения ТС.
Кроме того, наряду с противоугонной функцией обеспечивается возможность тревожной сигнализации о попытке угона и/или кражи ТС. Для обеспечения тревожной сигнализации контакты реле 9 подключаются к узлам тревожной сигнализации. Тревожная сигнализация (А) включается в двух случаях:
- если после включения зажигания реле 9 не срабатывает (NOT С & ПЗ). Такое бывает в тех случаях, когда зажигание включает угонщик;
- если при отключенном зажигании происходит срабатывание реле 9 (С & NOT ПЗ). Такое бывает при буксировании ТС или при его погрузке на передвижную платформу.
То есть включение тревожной сигнализации (А) может быть описано следующей формулой:
А=(С & NOT ПЗ)OR(NOT С & ПЗ)
Одинаковый или различный вид тревожной сигнализации будет соответствовать каждому из указанных выше случаев, зависит от алгоритма функционирования узлов тревожной сигнализации. Этот вопрос выходит за рамки темы настоящего изобретения и потому специально не рассматривается. В общем случае тревожная сигнализация может быть звуковой, световой, а также передаваемой в виде радиосигнала.
При этом необходимо отметить, что при отсутствии движения ТС заявляемое дистанционно управляемое реле работает полностью аналогично штатному автомобильному реле. Поэтому потенциальный угонщик не сможет установить наличие дистанционно управляемого реле путем "прозвонки" его цепей.
Рассмотрим далее работу автономного блока 4 питания и управления.
В первом варианте (фиг.2) построения указанного блока напряжение питания с шины 3 питания подается на вход зарядной цепи 12, которая регулирует напряжение заряда встроенного аккумулятора 13.
Проходя по зарядной цепи 12, ток в течение некоторого промежутка времени заряжает встроенный аккумулятор 13. Как только напряжение на встроенном аккумуляторе 13 достигает заданного порогового уровня, происходит включение блока 7 согласования, декодера 8 и микропроцессора 6. Из центрального блока управления по шине 3 питания на информационный вход блока 7 согласования поступают частотно-модулированные сигналы. Такими сигналами, в частности, могут быть сигналы локального кода разблокирования, формируемые при опознавании пользователя ТС. Блок 7 согласования преобразует поступившие на него частотно-модулированные сигналы в последовательность двоичных символов, которая поступает на декодер 8. Декодер 8 выделяет из последовательности двоичных символов сигналы локального кода разблокирования. Как указывалось выше, поступление локального кода разблокирования запоминается в микропроцессоре 6. Питание микропроцессора 6 обеспечивает находящийся в автономном блоке 4 питания и управления встроенный аккумулятор 13. С него напряжение питания подается на вход питания микропроцессора 6 и одновременно на обмотку реле 9. Поэтому даже при выключенном зажигании микропроцессор 6 готов к приему сигналов от датчиков горизонтального 10 и вертикального 11 движения, а реле 9 - к срабатыванию, при котором включаются как определенные функциональные органы ТС, так и узлы тревожной сигнализации.
Во втором варианте (фиг.3) построения вышеупомянутого автономного блока 4 питания и управления напряжение на обмотку реле 9, на блок 7 согласования, на декодер 8 и на микропроцессор 6 подается через схему 14 переключения питания либо с шины 3 питания, либо со встроенного аккумулятора 13. Если напряжение питания на шине 3 питания отсутствует (выключатель 1 зажигания разомкнут), то схема 14 переключения питания подключает ко входу питания микропроцессора 6, к обмотке реле 9 и ко входам питания блока 7 согласования и декодера 8 встроенный аккумулятор 13. Если же на шине 3 питания имеется необходимое напряжение питания, то схема 14 переключения питания подключает вышеупомянутые входы непосредственно к шине 3 питания, при этом разрядка встроенного аккумулятора 13 не происходит.
В остальном принципы работы первого (фиг.2) и второго (фиг.3) вариантов построения автономного блока 4 питания и управления одинаковы.
Таким образом, вновь введенные и общие с ближайшим аналогом узлы и связи позволяют решить поставленную задачу - создать дистанционно управляемое реле для охранно-противоугонной системы ТС, представляющее собой дальнейшее развитие технологии WAIT UP. Указанное дистанционно управляемое реле реализует наряду с противоугонной функцией функцию СТС ТС, причем не только при горизонтальных, но и при вертикальных перемещениях ТС, например, при попытках его установки на передвижную платформу для последующей принудительной транспортировки. При этом сохраняются все достоинства существующего серийно выпускаемого дистанционно управляемого реле WAIT UP - скрытность установки и уникальные противоугонные возможности.
Обеспечиваемый технический результат заключается в возможности подачи тревожных сигналов (звуковых, световых или передаваемых по радиосвязи) при любых видах перемещений ТС, независимо от того, включена или выключена система зажигания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОТИВОДЕЙСТВИЯ НЕСАНКЦИОНИРОВАННОМУ ПОЛЬЗОВАНИЮ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2296681C1 |
| СИСТЕМА ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2237585C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2221711C1 |
| РАДИОКАНАЛЬНАЯ ОХРАННО-ПРОТИВОУГОННАЯ СИСТЕМА | 2006 |
|
RU2295466C1 |
| СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2260526C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2209146C1 |
| СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2238197C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА | 2008 |
|
RU2373083C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2249513C1 |
| РАДИООХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2194635C1 |
Изобретение относится к технике защиты транспортных средств (ТС) от несанкционированного пользования. Предложенное дистанционно управляемое реле управляется по штатной бортовой сети питания от центрального блока управления. Дистанционно управляемое реле содержит блок датчиков движения, элемент задержки и электромеханическое реле. Контакты реле предназначены для подключения к функциональным органам ТС и к узлам тревожной сигнализации. Блок датчиков движения имеет датчик горизонтального движения на базе двухкоординатного акселерометра и датчик вертикального движения на базе однокоординатного акселерометра. В состав дистанционно управляемого реле входят также микропроцессор и автономный блок питания и управления. Вход последнего подключен к шине питания, первый выход - к первому управляющему входу микропроцессора, а второй выход соединен со входом питания микропроцессора и через обмотку реле - с функциональным входом микропроцессора. Первый и второй сигнальные входы микропроцессора подключены к первому и второму координатным выходам датчика горизонтального движения, третий сигнальный вход - к выходу датчика вертикального движения, а второй управляющий вход - к выходу элемента задержки. Элемент задержки подключен через шину питания и выключатель зажигания к бортовому аккумулятору. Предложенное дистанционно управляемое реле позволяет реализовать наряду с противоугонной функцией функцию тревожной сигнализации ТС, причем не только при горизонтальных, но и при вертикальных перемещениях ТС. Технический результат заключается в обеспечении возможности подачи тревожных сигналов (звуковых, световых или передаваемых по радиосвязи) при любых видах перемещений ТС, независимо от того включена или выключена система зажигания. 2 з.п. ф-лы, 3 ил.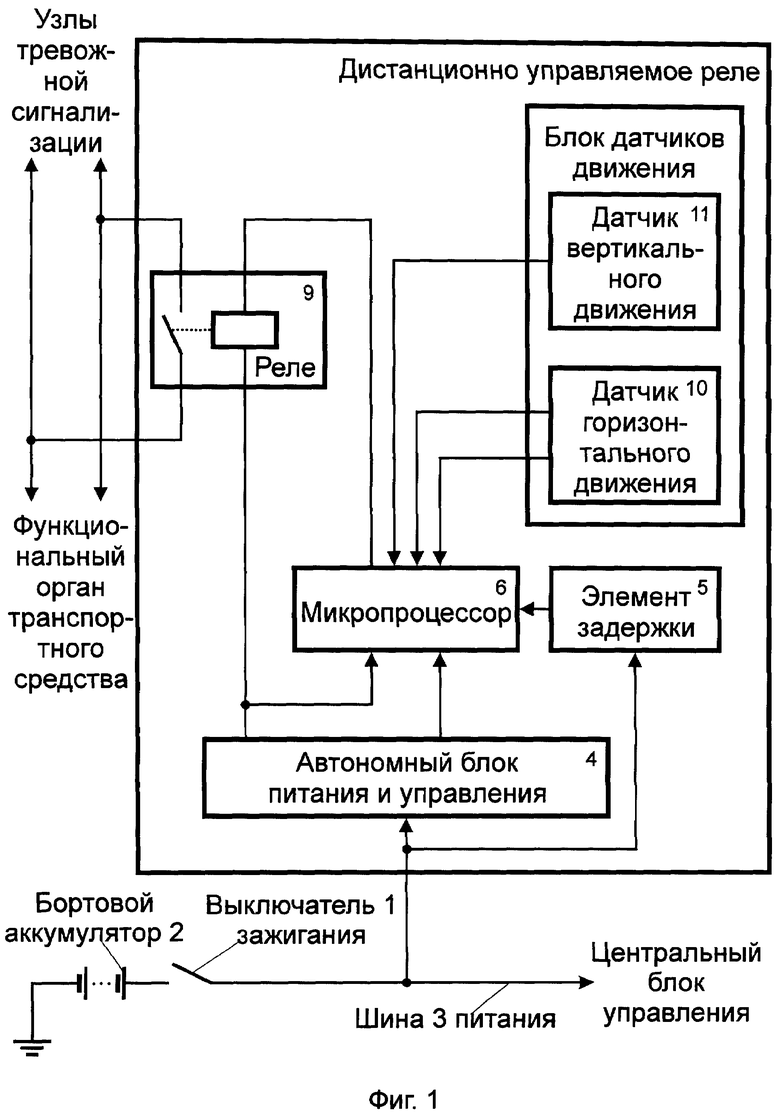
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2221711C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2000 |
|
RU2160196C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ АВТОМОБИЛЯ | 1996 |
|
RU2090395C1 |
| Противоугонное устройство для транспортного средства | 1987 |
|
SU1544613A1 |

