Изобретение относится к приборам ориентации и навигации подвижных объектов (ПО) в виде летательных аппаратов, судов и т.д. и может быть использовано в системах ориентации и навигации указанных ПО в качестве чувствительного элемента, выдающего информацию о двух компонентах вектора абсолютной угловой скорости и двух компонентах вектора кажущегося ускорения ПО по двум взаимно перпендикулярным его осям.
Уровень техники в данной области характеризуется следующей информацией.
Известен инерциальный измерительный прибор (ИИП) [1], содержащий традиционный интерферометр Маха-Цендера для измерения двух компонентов линейного ускорения.
Недостатком данного изобретения является сдвиг интерференционной картины и изменение центрирования оптических путей при перемещении зеркал, используемых для отклонения лучей.
Известен инерциальный измерительный прибор [2]. Он принят за наиболее близкий аналог предлагаемого изобретения.
Инерциальный измерительный прибор содержит гироскоп и акселерометр, установленные на полом валу, который имеет шарикоподшипниковые опоры, ротор синхронного двигателя, растр оптического датчика положения, установленные на полом валу, статор синхронного двигателя, излучатель и светоприемник оптического датчика положения, установленные на корпусе прибора, чувствительными элементами гироскопа и акселерометра являются пары балок прямоугольного сечения, ширина которых существенно больше высоты, прикрепленных к валу перпендикулярно к оси вращения таким образом, что для гироскопа более широкая сторона балки лежит в плоскости, перпендикулярной оси вращения вала, а для акселерометра более узкая сторона балки лежит в плоскости, перпендикулярной оси вращения вала, с чувствительными элементами гироскопа, акселерометра и полым валом связаны изолированные друг от друга контуры световолокон таким образом, что для гироскопа контуры световолокон проходят внутри полого вала до и после пересечения с балками гироскопа, где контуры световолокон укладываются витками одно вдоль верхней поверхности одной из балок, а другое вдоль нижней поверхности этой же балки, на другой балке световолокно, уложенное вдоль верхней поверхности первой балки, укладывается вдоль нижней поверхности второй балки, а световолокно, уложенное вдоль нижней поверхности первой балки, укладывается вдоль верхней поверхности второй балки, а для акселерометра контуры световолокон проходят внутри полого вала до и после пересечения с балками акселерометра, где контуры световолокон укладываются витками одно вдоль передней поверхности пары балок, а другое вдоль задней поверхности, в каждом контуре один конец соединен со светоделителем, являющимся оптическим приемником, расположенным напротив излучающей поверхности светодиода, вторые концы контуров попарно соединены с сумматором света и расположены на торце полого вала напротив соответствующих каждому из них двух фотоприемников, закрепленных на корпусе так, что каждый из них вместе со светодиодом, светоделителем, соответствующим контуром световолокна, сумматором света образуют два интерферометра Маха-Цендера, один интерферометр соответствует гироскопу, второй интерферометр - акселерометру, выход каждого фотоприемника соединен со входами первого и второго блоков - по усилителю и фильтру в каждом блоке, выходы этих блоков соединены с первыми входами первого и второго фазовых демодуляторов соответственно, второй вход первого фазового демодулятора соединен с выходом оптического датчика положения с нулевым начальным фазовым сдвигом, второй вход второго фазового демодулятора соединен с выходом оптического датчика положения с начальным фазовым сдвигом, равным 90°, выходы четырех фазовых демодуляторов соединены со входами четырех выходных блоков - по усилителю и фильтру в каждом блоке, выходы двух из них являются выходами инерциального измерительного прибора по двум компонентам абсолютной угловой скорости подвижного объекта по осям, перпендикулярным оси вращения полого вала, выходы третьего и четвертого выходных фильтров являются выходами по двум компонентам кажущегося ускорения подвижного объекта по тем же осям.
Недостатком данного изобретения является существенное влияние колебаний и вибраций подвижного объекта на точность выходных сигналов гироскопа и акселерометра, а также малая чувствительность прибора.
Задачей предлагаемого изобретения является повышение чувствительности инерциального измерительного прибора с одновременным снижением чувствительности к моментам кручения, колебаниям и вибрациям подвижного объекта, действующим по осям балок.
Технический результат изобретения состоит в том, что при его реализации количество пар балок для гироскопа и акселерометра соответственно увеличивается с одной до двух. Дополнительно балки как гироскопа, так и акселерометра устанавливаются в обод, имеющий форму полого цилиндра.
Сущность изобретения. Поставленная задача решается за счет того, что в инерциальный измерительный прибор, содержащий гироскоп и акселерометр, установленные на полом валу, который имеет шарикоподшипниковые опоры, ротор синхронного двигателя, растр оптического датчика положения, установленные на полом валу, статор синхронного двигателя, излучатель и светоприемник оптического датчика положения, установленные на корпусе прибора, чувствительными элементами гироскопа и акселерометра являются пары балок прямоугольного сечения, ширина которых существенно больше высоты, прикрепленных к валу перпендикулярно к оси вращения таким образом, что для гироскопа более широкая сторона балки лежит в плоскости, перпендикулярной оси вращения вала, а для акселерометра более узкая сторона балки лежит в плоскости, перпендикулярной оси вращения вала, с чувствительными элементами гироскопа, акселерометра и полым валом связаны изолированные друг от друга контуры световолокон таким образом, что для гироскопа контуры световолокон проходят внутри полого вала до и после пересечения с балками гироскопа, где контуры световолокон укладываются витками один вдоль верхней поверхности одной из балок, а другой вдоль нижней поверхности этой же балки, на другой балке световолокно, уложенное вдоль верхней поверхности первой балки, укладывается вдоль нижней поверхности второй балки, а световолокно, уложенное вдоль нижней поверхности первой балки, укладывается вдоль верхней поверхности второй балки, а для акселерометра контуры световолокон проходят внутри полого вала до и после пересечения с балками акселерометра, где контуры световолокон укладываются витками одно вдоль передней поверхности пары балок, а другое вдоль задней поверхности, в каждом контуре один конец соединен со светоделителем, являющимся оптическим приемником, расположенным напротив излучающей поверхности светодиода, вторые концы контуров попарно соединены с сумматором света и расположены на торце полого вала напротив соответствующих каждому из них двух фотоприемников, закрепленных на корпусе так, что каждый из них вместе со светодиодом, светоделителем, соответствующим контуром световолокна, сумматором света образуют два интерферометра Маха-Цендера, один интерферометр соответствует гироскопу, второй интерферометр - акселерометру, выход каждого фотоприемника соединен со входами первого и второго блоков, включающих по усилителю и фильтру, выходы этих блоков соединены с первыми входами первого и второго фазовых демодуляторов соответственно, второй вход первого фазового демодулятора соединен с выходом оптического датчика положения с нулевым начальным фазовым сдвигом, второй вход второго фазового демодулятора соединен с выходом оптического датчика положения с начальным фазовым сдвигом, равным 90°, выходы четырех фазовых демодуляторов соединены со входами четырех выходных блоков, содержащих по усилителю и фильтру, выходы двух из них являются выходами инерциального измерительного прибора по двум компонентам абсолютной угловой скорости подвижного объекта по осям, перпендикулярным оси вращения полого вала, выходы двух других выходных блоков являются выходами по двум компонентам кажущегося ускорения подвижного объекта по тем же осям, дополнительно введены две пары балок и два обода, дополнительная пара балок для гироскопа по форме аналогична уже имеющимся и установлена на валу перпендикулярно уже имеющимся таким образом, что продольные оси всех четырех балок лежат в одной плоскости, а более узкие стороны дополнительных балок лежат в плоскости, перпендикулярной оси вращения, с балками гироскопа жестко соединен обод, представляющий собой полый цилиндр, по высоте равный ширине балки, дополнительная пара балок для акселерометра по форме аналогична уже имеющимся и установлена на валу параллельно-последовательно уже имеющимся на расстоянии, равном ширине балки, расположение волокон в них аналогично уже имеющимся, с балками акселерометра жестко соединен обод, представляющий собой полый цилиндр, по высоте равный трехкратной ширине балки.
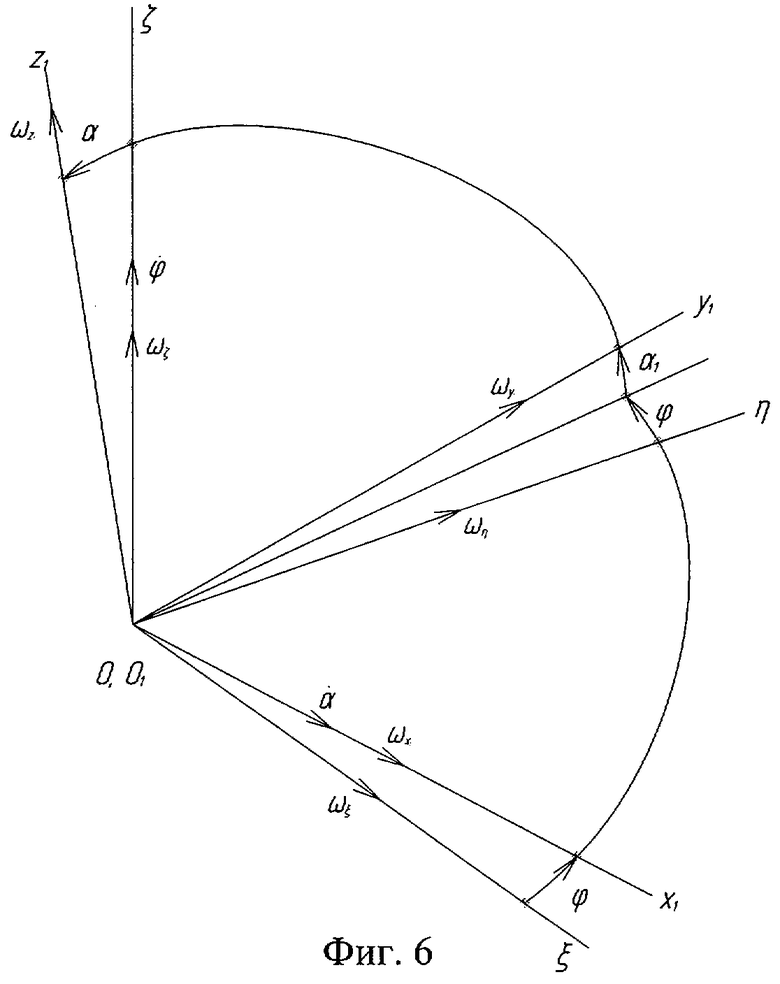
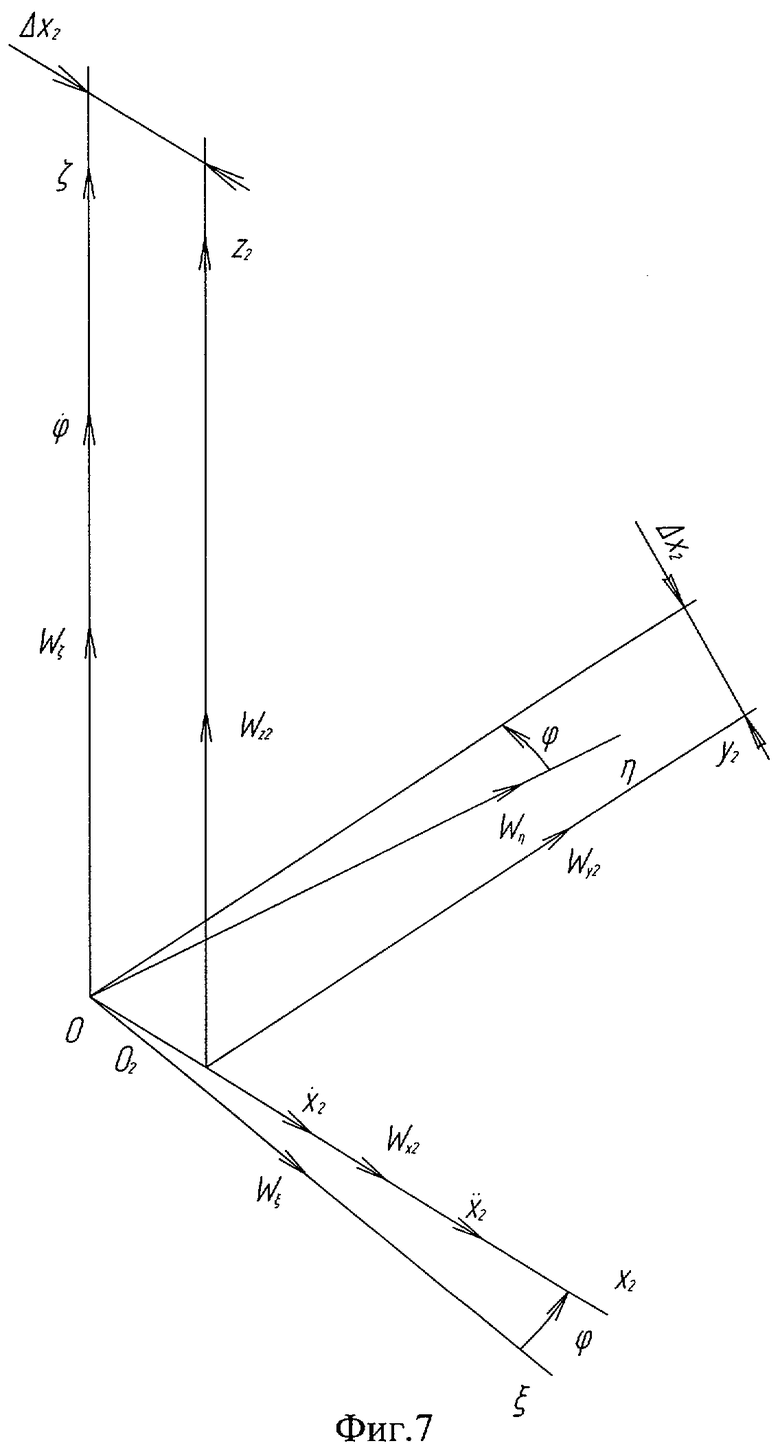
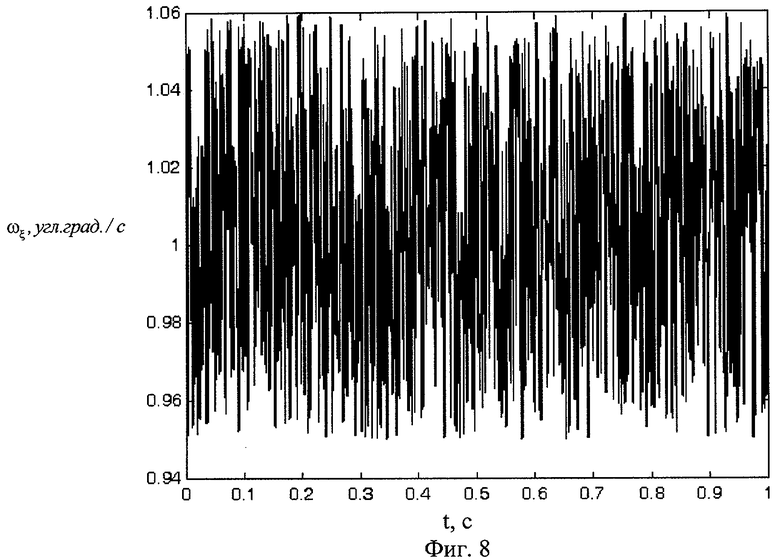
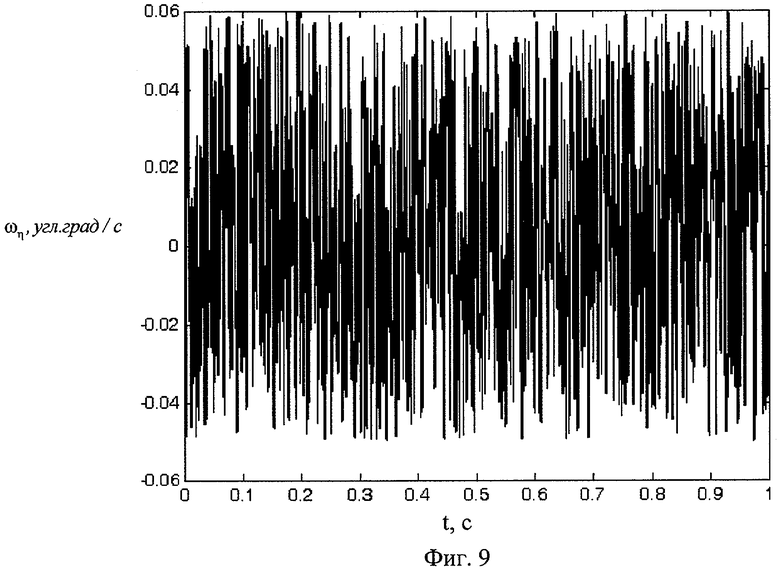
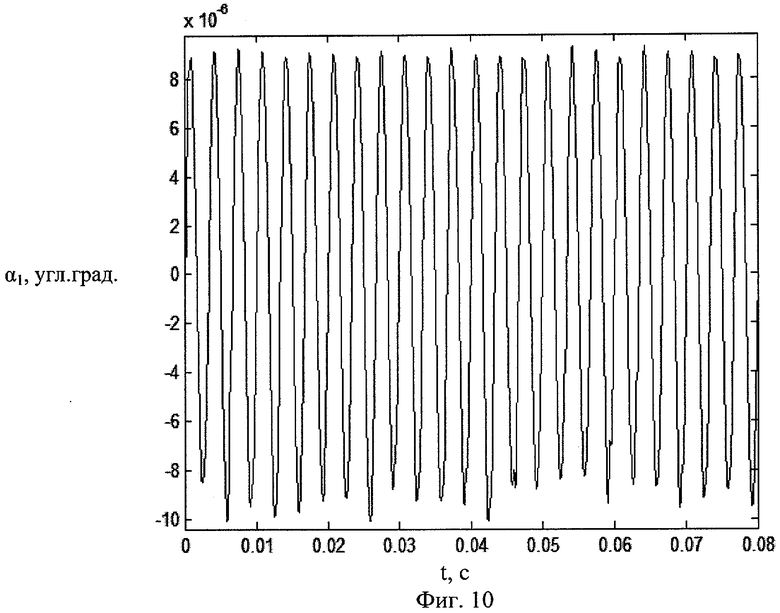
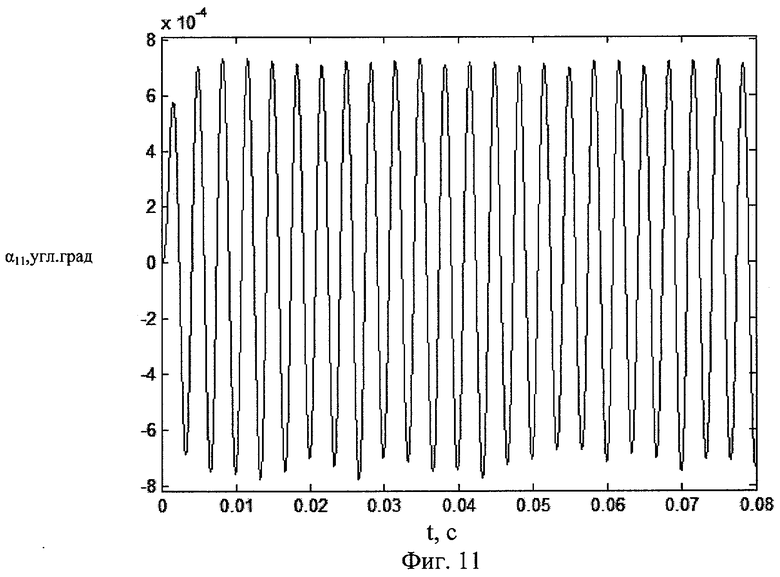
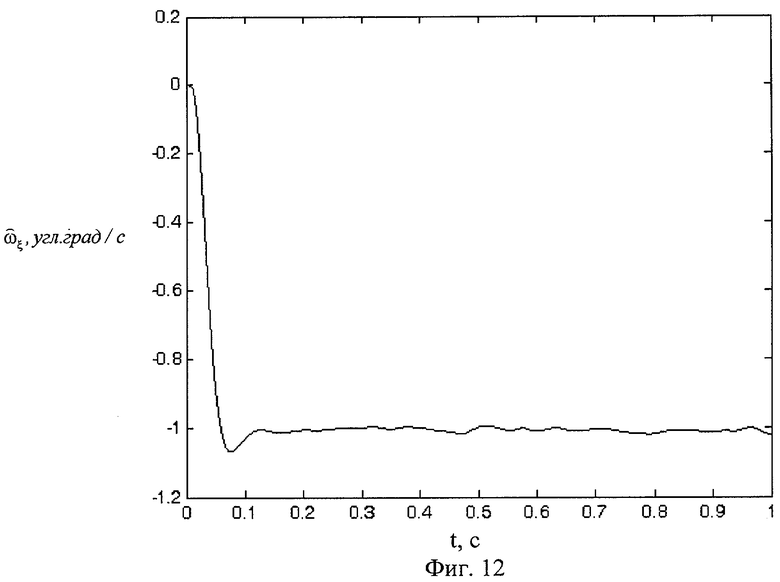
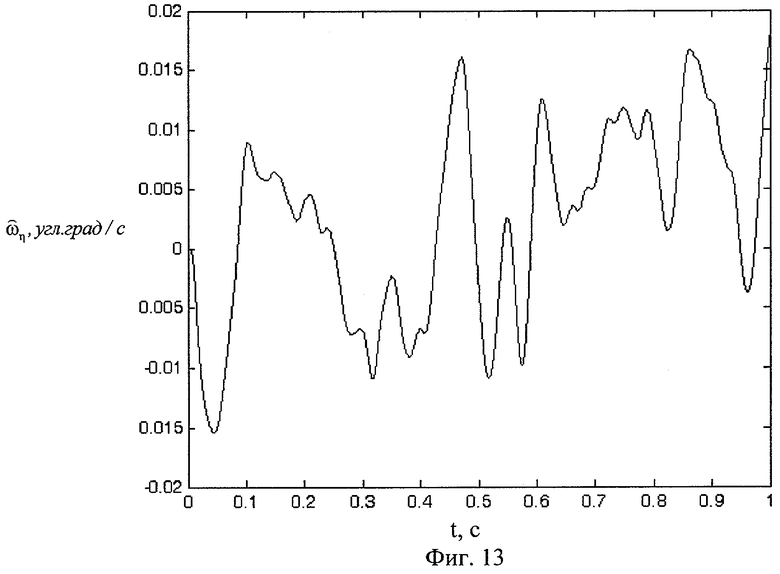
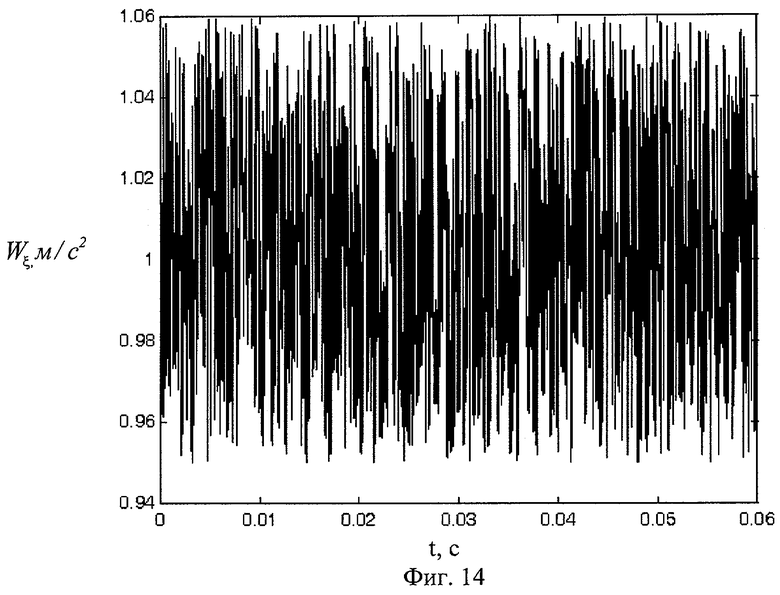
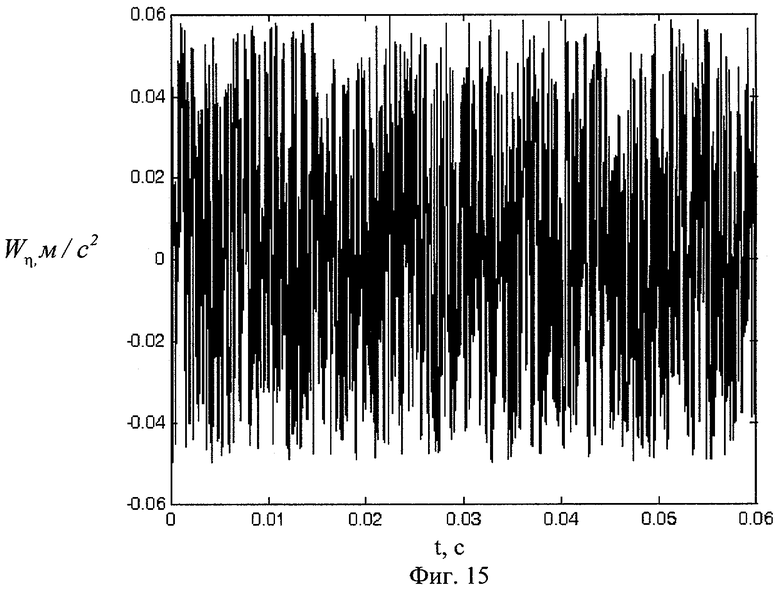
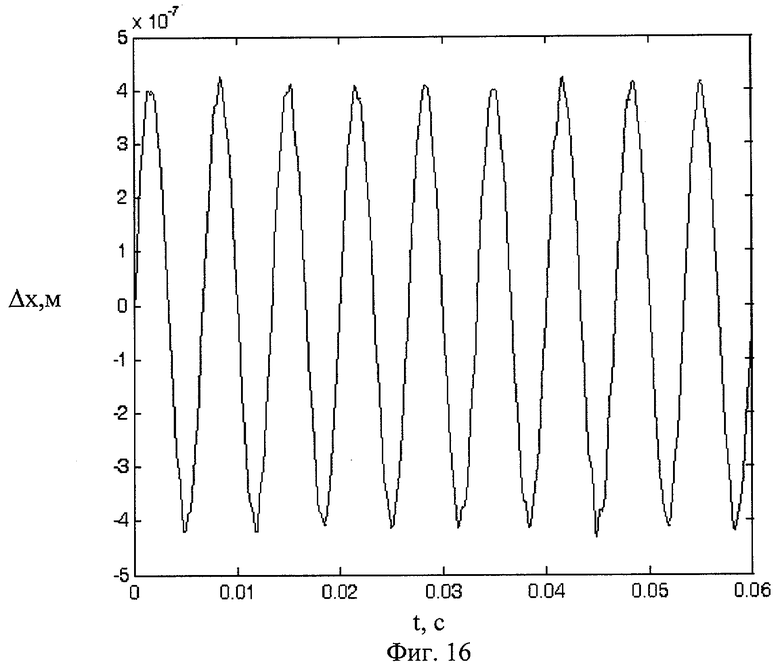
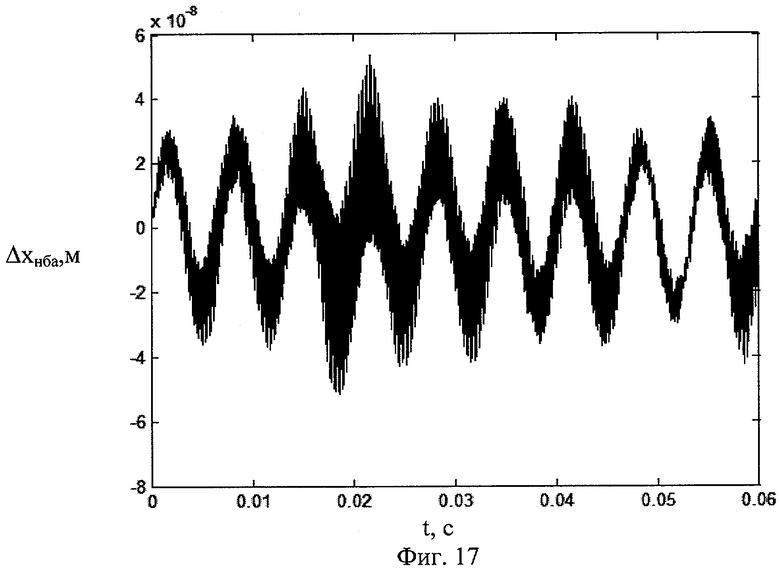
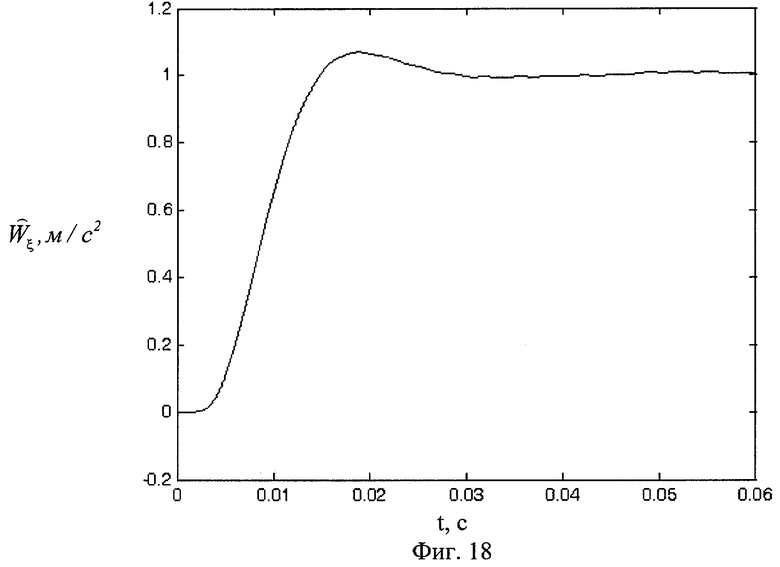
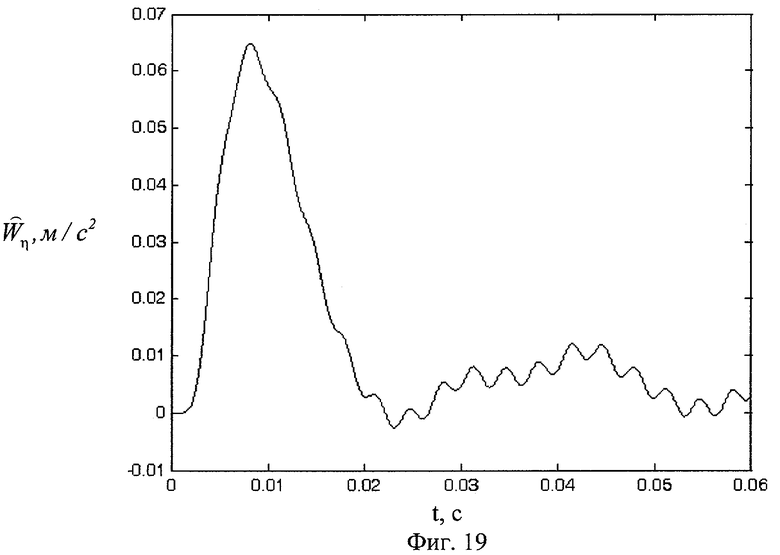
На фиг.1 представлена кинематическая схема инерциального измерительного прибора. На фиг.2 представлена функциональная схема интерферометра Маха-Цендера. На фиг.3 представлена кинематическая схема гироскопа. На фиг.4 представлена кинематическая схема акселерометра. На фиг.5 представлена функциональная схема устройства обработки сигналов гироскопа и акселерометра. На фиг.6 представлена схема связи между системой координат, связанной с подвижным объектом, и системой координат, связанной с ободом гироскопа. На фиг.7 представлена схема связи между системой координат, связанной с подвижным объектом, и системой координат, связанной с ободом акселерометра. На фиг.8 представлен график угловой скорости объекта по оси Oξ, задаваемой при математическом моделировании. На фиг.9 представлен график угловой скорости объекта по оси Oη, задаваемой при математическом моделировании. На фиг.10 представлен график изменения угла поворота ободов гироскопа α1, определяемый при математическом моделировании. На фиг.11 представлен график изменения угла поворота балок гироскопа в наиболее близком аналоге α11, определяемой при математическом моделировании. На фиг.12 представлен график изменения выходного сигнала прибора, определяемого при математическом моделировании, соответствующего оценке угловой скорости объекта по оси Oξ. На фиг.13 представлен график изменения выходного сигнала прибора, определяемого при математическом моделировании, соответствующего оценке угловой скорости объекта по оси Oη. На фиг.14 представлен график ускорения поступательного движения объекта по оси Oξ, задаваемого при математическом моделировании. На фиг.15 представлен график ускорения поступательного движения объекта по оси Oη, задаваемого при математическом моделировании. На фиг.16 представлен график смещения Δx центра системы координат, связанной с ободом относительно центра системы координат, связанной с валом, определяемого при математическом моделировании. На фиг.17 представлен график смещения Δx3 центра системы координат, связанной с концами балок акселерометра в наиболее близком аналоге относительно центра системы координат, связанной с валом, определяемого при математическом моделировании. На фиг.18 представлен график изменения выходного сигнала прибора, соответствующего оценке ускорения поступательного движения объекта по оси Oξ, определяемого при математическом моделировании. На фиг.19 представлен график изменения выходного сигнала прибора, соответствующего оценке ускорения поступательного движения объекта по оси Oη, определяемого при математическом моделировании.
Позицией 1 обозначен синхронный электрический двигатель, ротор которого установлен на полом валу 2, имеющем свободу вращения вокруг нормальной оси подвижного объекта, обеспечиваемую конструктивно через посредство шарикоподшипниковых опор 3, наружные кольца которых закреплены на корпусе 4 подвижного объекта. На валу 2 жестко закреплены балки 5, 6 гироскопа и балки 7 акселерометра в виде диполя, балки 5 гироскопа и 7 акселерометра параллельны оси Oy, а балки 6 гироскопа параллельны оси Ox. К балкам гироскопа и акселерометра присоединены по одному ободу цилиндрической формы 8 и 9 соответственно. Балки 5, 6 и обод 8 образуют гироскоп, а нижние и верхние балки 7 и обод 9 - акселерометр. Сквозь вал 2 и балки 5 гироскопа проходят контуры 10, 11 световолокна, а сквозь вал 2 и балки 7 акселерометра - контуры 12, 13 световолокна. На валу также установлены светоделитель 14, сумматор света 15 и растр оптического датчика положения 16, представляющий собой диск с последовательностью прозрачных и непрозрачных радиальных полос. Для съема информации с ИИП используются два интерферометра Маха-Цендера, один из них, состоящий из светоделителя 14, сумматора света 15, световолокон 10, 11, расположенных на вращающейся части, а также из светодиода 17, линзы 18 и детектирующей схемы 19, расположенных на корпусе, используется для съема информации с гироскопа. Второй, состоящий из элементов 14, 15, 12, 13, 17, 18, 19, используется для съема информации с акселерометра. Для измерения угла ϕ поворота вала относительно основания на корпусе установлены излучатель 20 и светоприемник 21 оптического датчика положения вала, между которыми расположен растр 16 оптического датчика положения вала. Позициями 22 и 23 обозначены верх и низ полого вала 2, соответственно. Позициями 24 и 25 обозначены верхняя и нижняя поверхности балки 5 гироскопа, соответственно. Позициями 26 и 27 обозначены правая и левая часть балки 5 гироскопа, соответственно. Позицией 28 обозначено направление прохождения выходного луча. Позициями 29 и 30 обозначены ближняя и дальняя поверхности балки 7 акселерометра, соответственно. Позициями 31 и 32 обозначены левая и правая часть балки акселерометра, соответственно. В устройство обработки сигналов входят: блок 33, объединяющий усилитель и фильтр, подключенный к гироскопу, блок 34, объединяющий усилитель и фильтр, подключенный к акселерометру, демодуляторы 35, 36, 37, 38 и блоки 39, 40, 41, 42, объединяющие усилители с фильтрами.
Приняты следующие обозначения: Oξηζ - система координат, связанная с подвижным объектом, причем ось Oη параллельна продольной оси подвижного объекта, ось Oζ параллельна нормальной оси подвижного объекта, а Oξ - параллельна поперечной оси подвижного объекта. O1x1y1z1 - система координат, связанная с ободом гироскопа. Балки гироскопа, содержащие контуры световолокон, совпадают с осью O1y1. Балки гироскопа, не содержащие контуры световолокон, совпадают с осью O1x1. Ось O1z1 совпадает с осью вращения вала. Ox2y2z2 - система координат, связанная с ободом акселерометра. Балки акселерометра совпадают с осью О2y2. Ось O2z2 совпадает с осью вращения вала. Ось O2x2 перпендикулярна балкам и оси вращения вала. Вал с балками имеет возможность поворота на угол ϕ относительно корпуса подвижного объекта с угловой скоростью  , задаваемой с помощью электропривода, ϕξ, ωη, ωζ - компоненты абсолютной угловой скорости вращения подвижного объекта, Wξ, Wη, Wζ - компоненты кажущегося ускорения точки О.
, задаваемой с помощью электропривода, ϕξ, ωη, ωζ - компоненты абсолютной угловой скорости вращения подвижного объекта, Wξ, Wη, Wζ - компоненты кажущегося ускорения точки О.
Инерциальный измерительный прибор устанавливается на борту подвижного объекта как можно ближе к центру масс. В процессе работы полый вал 2 вращается вокруг оси Oz с частотой 100...250 Гц.
На фиг.1 представлена кинематическая схема ИИП. Работа ИИП происходит следующим образом. Синхронный двигатель 1 вращает вал 2 и балки 5, 6, 7 со всеми закрепленными на них элементами вокруг собственной оси вращения. Свет передается от светодиода 17 через светоделитель 15 в контуры световолокна 11, 12, 13, 14. Лучи, пройдя по волоконным дорожкам сквозь вал и пары балок 5 и 6, попадают на сумматор 16, откуда через линзу 18 на детектирующую схему 19.
При действии на прибор входной угловой скорости, перпендикулярной оси вращения прибора, на балки 5, 6 и обод 8 начинает действовать гироскопический момент, который приводит к изгибу балок 5 гироскопа в плоскости Oy1z1 и кручению балок 6 вокруг оси Oy1.Повороту обода 8 вокруг оси Oy (и соответственно кручению балок 5) препятствуют балки 7. Контуры световолокон 10, 11, проложенные вдоль верха 24 и низа 25 внешней поверхности балок 5, удлиняются и укорачиваются соответственно при изгибе балок 5. Удлинение или укорачивание внешних поверхностей вызывает аналогичное изменение световолокон. Появляющаяся при этом разность длин оптических путей Δb приводит к сдвигу интерференционной картины, регистрирующемуся детектирующей схемой 19.
Уравнение движения обода гироскопа имеет вид:

где α1, ϕ - углы поворотов осей системы координат O1x1y1z1, связанной с ободом гироскопа, относительно системы координат Oξηξ, связанной с корпусом прибора; Jx1, Jy1, Jz1 - моменты инерции обода 8 и балок 5, 6 относительно осей O1x1, O1y1, O1z1; k - коэффициенты жесткости балок 5, 6 при поворотах обода 8 на угол α1 относительно оси O1x1; n1 - коэффициент демпфирования угловых колебаний обода 8 вокруг оси O1x1; ϕ - угол поворота вала вокруг оси Oξ;  - угловая скорость вращения вала вокруг оси Oξ.
- угловая скорость вращения вала вокруг оси Oξ.
При действии на прибор линейного ускорения по оси O2x2, перпендикулярной оси вращения прибора, на балки 7 и обод 9 акселерометра начинает действовать сила инерции, которая приводит к изгибу балок 7 акселерометра. Угловая скорость, действующая на прибор в плоскости, перпендикулярной оси вращения, приводит к появлению гироскопического момента, стремящегося совместить ось вращения обода с вектором угловой скорости. С целью устранения этого эффекта и вводят дополнительную пару балок 7. Контуры световолокон 12, 13, проложенные вдоль ближней 29 и дальней 30 поверхности балок 7, удлиняются и укорачиваются соответственно при изгибе балок 7. Удлинение или укорачивание внешних поверхностей вызывает аналогичное изменение световолокон. Появляющаяся при этом разность оптических путей Δb приводит к сдвигу интерференционной картины, регистрирующемуся детектирующей схемой 19.
Уравнение движения обода акселерометра имеет вид:

где Δx2 - перемещение обода 9 акселерометра вдоль оси О2x2; m - масса обода 9 и балок 7 акселерометра; k∂ - коэффициент демпфирования линейного перемещения обода 9 акселерометра; kакс - коэффициент жесткости балок 7 при линейном перемещении обода.
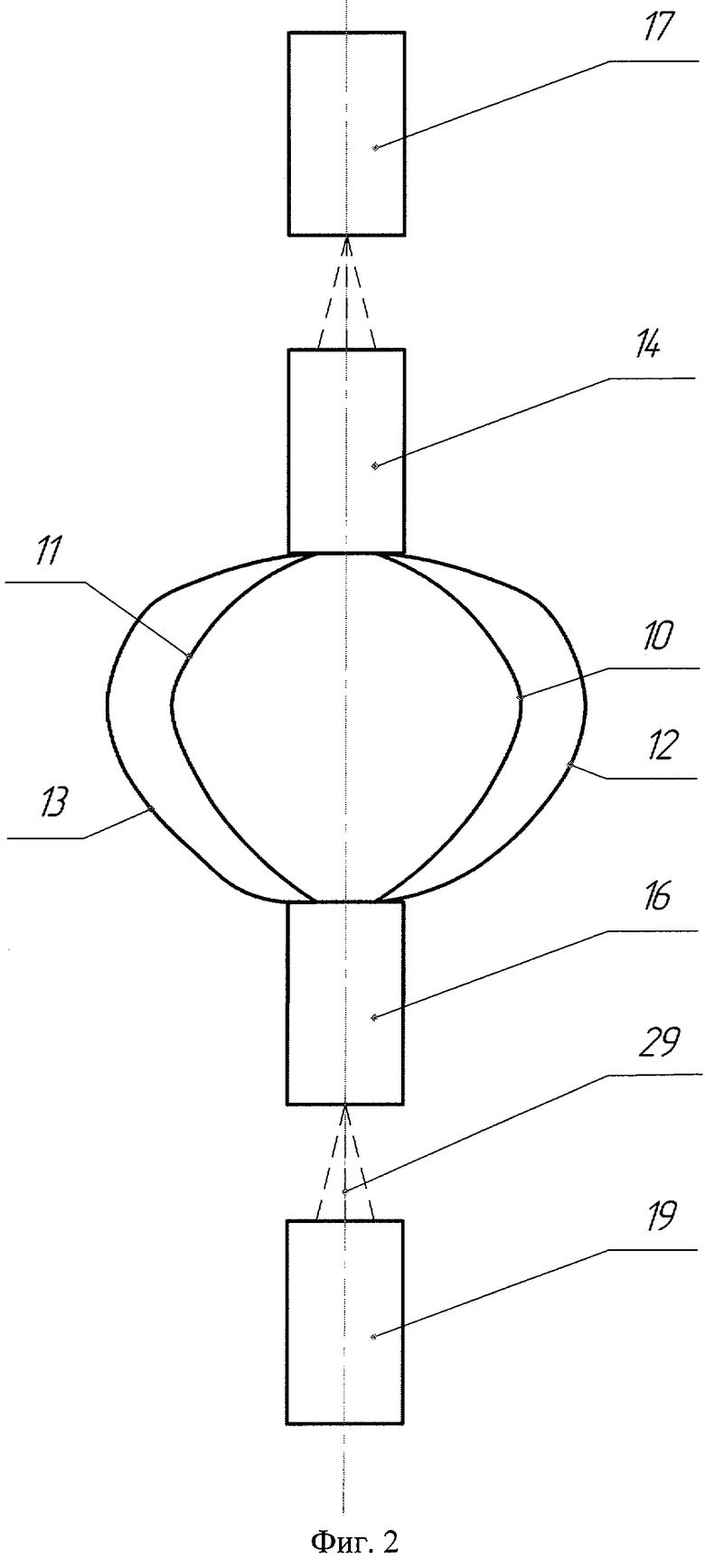
На фиг.2 показан модифицированный интерферометр Маха-Цендера. Свет от светодиода 17 попадает на светоделитель 14, где делится на два луча, которые, пройдя по световолокнам 10, 11, 12, 13, попадают на сумматор света 16 и на выход 28, где регистрируются детектирующей схемой 19. Разность оптических путей, пройденных лучами, приводит к появлению фазового сдвига, который регистрируется на выходе 28. В этой конфигурации не требуется полупрозрачных зеркал или отражающих зеркал. Фазовый сдвиг изменяется по формуле (3) [3] прямо пропорционально разности длин путей, появляющейся при действии на прибор угловой скорости или линейного ускорения по осям, ортогональным оси вращения вала.

где ΔΨ - фазовый сдвиг; Δb - разность оптических путей лучей; λ - длина волны света, проходящего через световолокна.
Из формулы (3) видно, что чувствительность интерферометра может быть изменена двумя способами:
1) Изменением длины волны света λ;
2) Изменением числа витков световолокна.
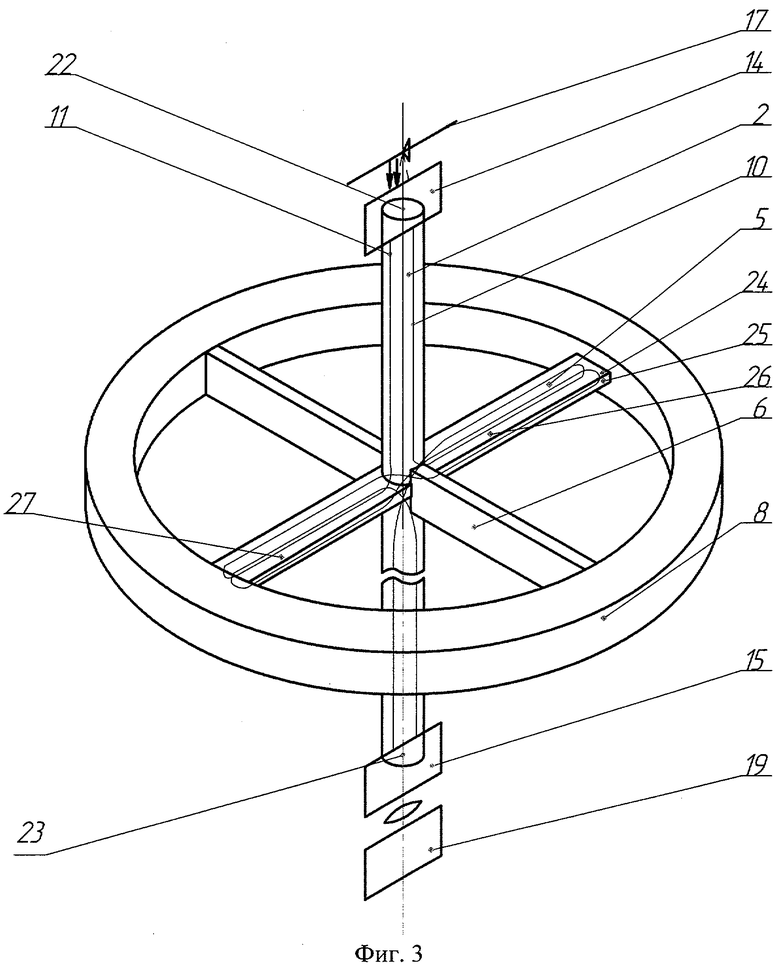
На фиг.3 показана конструкция гироскопа с внесенными изменениями с целью повышения точности и снижения чувствительности к вибрациям и моментам кручения вокруг балок. Свет от светодиода 17 поступает на светоделитель 14, где разделяется на два луча, которые поступают в световолокна 10, 11. Контур световолокна 10 проходит внутри полого вала 2 до пересечения с балкой 5, где выходит вдоль верха внешней поверхности 24 правой части 26 балки 5, возвращается обратно к валу, выходит вдоль низа 26 внешней поверхности левой части 28 балки 5, возвращается обратно к валу. Пройдя балку 5, контур световолокна 10 проходит вдоль полого вала 2 до сумматора света 15. Контур световолокна 11 проходит внутри полого вала 2 до пересечения с балкой 5, где делает виток вдоль низа 25 внешней поверхности правой части 26 балки 5, а затем вдоль верха 24 внешней поверхности левой части балки 5. После этого контур световолокна 11, пройдя вдоль полого вала 2, попадает на сумматор света 15. В нижней части 23 вала 2 разница оптических путей двух лучей приводит к сдвигу интерференционной картины, который регистрируется детектирующей схемой 19. При действии на прибор входной угловой скорости, перпендикулярной оси вращения прибора, на балки 5, 6 и обод 8 начинает действовать гироскопический момент, который приводит к изгибу балок 5 гироскопа в плоскости Oy1z1 и кручению балок 6 вокруг оси Ox1. Повороту обода 8 вокруг оси Oy1 (и соответственно кручению балок 5) препятствуют балки 6. Контуры световолокон 10, 11, проложенные вдоль верха 24 и низа 25 внешней поверхности балок 5, удлиняются и укорачиваются, соответственно, при изгибе балок 5. Удлинение или укорачивание внешних поверхностей вызывает аналогичное изменение световолокон. Появляющаяся при этом разность оптических путей Δb приводит к сдвигу интерференционной картины, регистрирующемуся детектирующей схемой 19.
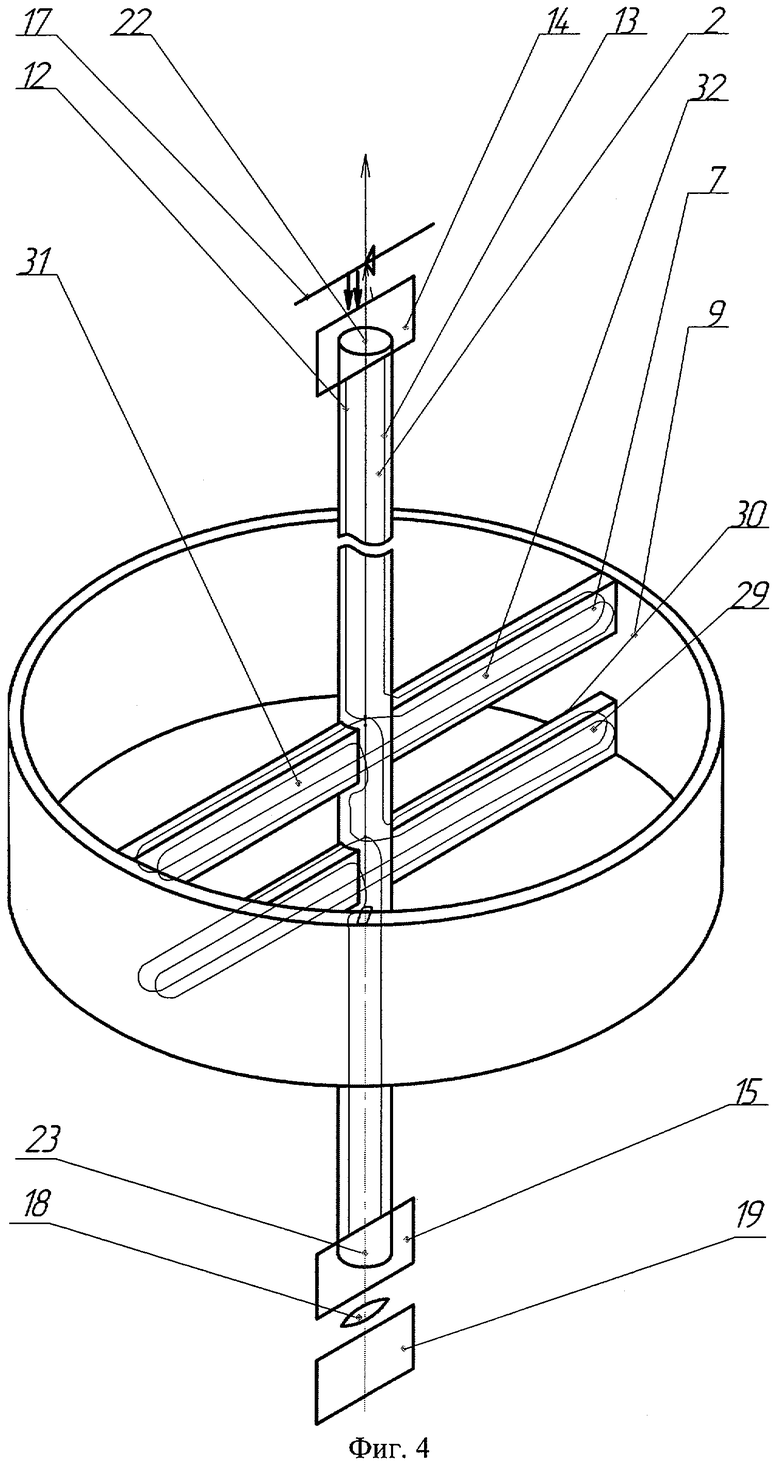
На фиг.4 показана конструкция акселерометра. Свет от светодиода 17 поступает на светоделитель 14, где разделяется на два луча, которые поступают в световолокна 12, 13. Контур световолокна 12 уложен внутри полого вала 2 до пересечения с балками 7, где делает виток вдоль дальней поверхности 30 сначала правой 32, а затем левой 31 стороны балок 7. Затем, будучи уложенным вдоль вала 2 до пересечения с балками 7, контур световолокна 12 получает размещение, которое аналогично размещению в первых балках 7. После этого контур световолокна 12 расположен вдоль полого вала 2 до сумматора света 15. Контур световолокна 13 уложен внутри полого вала 2 до пересечения с балками 7, где делает виток вдоль ближней поверхности 29 сначала правой части 32, а затем левой части 31 балок 7. Затем, будучи уложенным вдоль вала 2 до пересечения со вторыми балками 7, контур световолокна 13 получает размещение, которое аналогично размещению в первых балках 7. После этого контур световолокна 13 расположен вдоль полого вала 2 до сумматора света 15. Лучи, пройдя световолокна 12 и 13, интерферируют в сумматоре света 15. В нижней части 23 вала 2 разница оптических путей двух лучей приводит к сдвигу интерференционной картины, который регистрируется детектирующей схемой 19. При действии на прибор линейного ускорения по оси, перпендикулярной оси вращения прибора, на балки 7 и обода 9 акселерометра начинает действовать сила инерции, которая приводит к изгибу балок 7 акселерометра. Угловая скорость, действующая на прибор в плоскости, перпендикулярной оси вращения, приводит к появлению гироскопического момента, стремящегося совместить ось вращения обода с вектором угловой скорости. С целью устранения этого эффекта и вводят дополнительную пару балок 7, соединенных с уже имеющейся парой балок 7 ободом 9. Контуры световолокон 12, 13, проложенные вдоль ближней 29 и дальней 30 поверхности балок 7, удлиняются и укорачиваются соответственно при изгибе балок 7. Появляющаяся при этом разность оптических путей Δb приводит к сдвигу интерференционной картины, регистрирующемуся детектирующей схемой 19.
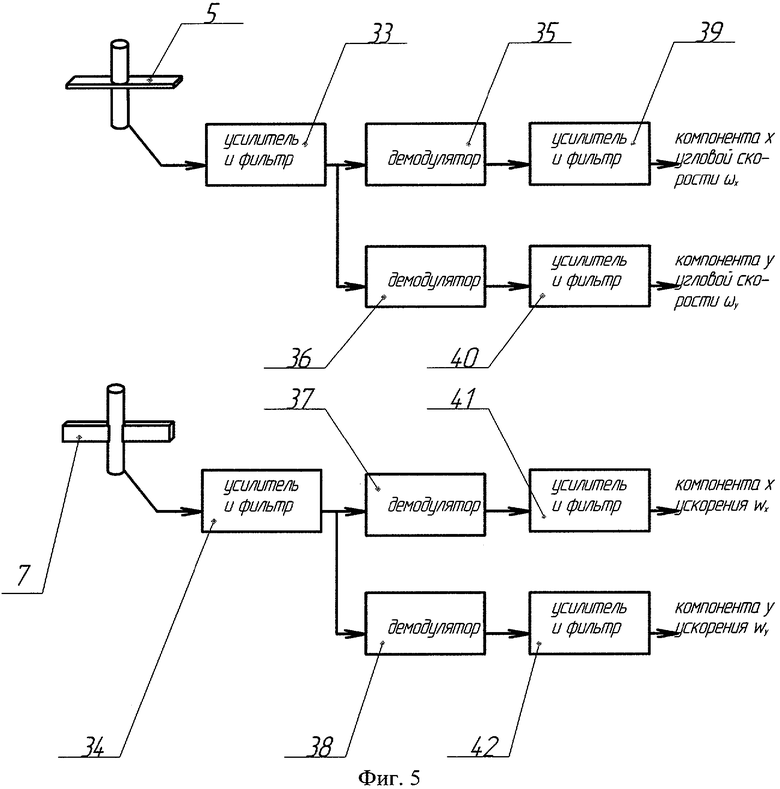
Фиг.5 иллюстрирует процесс детектирования и выделения сигналов по угловой скорости и линейному ускорению. Выходной сигнал гироскопа проходит через блок 33, откуда в нужной форме поступает на демодуляторы 35, 36. Демодулятор 35 выбирает некоторое положение вала, принимает его за начало отсчета (0°) и фиксирует выбранную позицию вдоль инерциальной ξ-оси. Демодулятор 36 выбирает ортогонально направленную η-ось. Затем сигналы проходят через блоки 39, 40 и на выходе имеем две компоненты угловой скорости. Подобным образом снимаются показания акселерометра, где для получения двух компонент ускорения сигнал проходит через блок 34, демодуляторы 37, 38 и блоки 41, 42.
Сигналы с датчиков по вышеописанной схеме поступают на устройство обработки сигналов, с которого выдается оценка абсолютной угловой скорости  ,
,  и кажущегося ускорения
и кажущегося ускорения  ,
,  в системе координат, связанной с прибором.
в системе координат, связанной с прибором.
При вращении вала с гироскопа поступает сигнал, состоящий из следующих составляющих:
1. Медленно меняющихся составляющих дрейфов гироскопов, которые становятся известными, так как накладываются на угловую скорость вращения платформы и смещают выходной сигнал на некоторую постоянную величину, благодаря чему появляется возможность исключить ее влияние на результаты измерений.
2. Угловая скорость подвижного объекта - измеряемый сигнал, он накладывается на угловую скорость вращения вала и при постоянной угловой скорости объекта имеет синусоидальную форму, причем максимальное значение эта составляющая сигнала будет иметь при совпадении измерительной оси прибора с угловой скоростью объекта, минимальным ее значение будет при таком повороте платформы, когда измерительная ось будет обратна направлению угловой скорости, и нулевым при таком повороте платформы, при котором угол между измерительной осью и угловой скоростью равен 90°. Благодаря синусоидальному характеру сигнала его легко выделить из прочих составляющих.
3. Шумовая высокочастотная составляющая дрейфа. Компенсируется лишь частично, так как выделить ее из сигнала гироскопа достаточно сложно.
Работа наиболее близкого аналога описывается следующими уравнениями:

где α11 - угол поворота оси системы координат, связанной с концами балок, относительно оси системы координат, связанной с корпусом прибора; Jx2, Jy2, Jz2 - моменты инерции балок относительно осей, связанных с концами балок; kбалх - коэффициенты жесткости балок при изгибе на угол α11; b11 - коэффициент демпфирования угловых колебаний ободов.

где  - перемещение концов балок акселерометра; m3 - массы балок акселерометра; k∂3 - коэффициенты демпфирования линейных перемещений концов балок акселерометра; kакс3 - коэффициенты жесткости при линейных перемещениях концов балок.
- перемещение концов балок акселерометра; m3 - массы балок акселерометра; k∂3 - коэффициенты демпфирования линейных перемещений концов балок акселерометра; kакс3 - коэффициенты жесткости при линейных перемещениях концов балок.
Результаты проведенного по уравнениям (1), (2), (4) и (5) моделирования работы предлагаемого устройства и аналога представлены на фиг.8 - фиг.19. Для математического моделирования были заданы:
- параметры движений:
- угловая скорость объекта: по оси Oξ - 1 рад/с, по осям Oη и Oζ - нулевые;
- ускорение поступательного движения: по оси Oξ - 1 м/с2, по осям Оη и Оζ - нулевые;
- частота вращения вала с балками, ободами и планками - 150 Гц;
- параметры гироскопа:
- моменты инерции: Jx1=6.74·10-5 кг·м2, Jy1=6.85·10-5 кг·м2, Jz1=1.39·10-5 кг·м2;
- коэффициенты жесткости балок: k=28 кг·м2/с2;
- коэффициент демпфирования: n1=0.12 кг·м2/с;
- параметры гироскопа в наиболее близком аналоге:
- моменты инерции: Jx2=2.66·10-7 кг·м2, Jy2=1.07·10-8 кг·м2, Jz2=2.66·10-7 кг·м2;
- коэффициенты жесткости балок: kбалх=28 кг·м2/с2,
- коэффициент демпфирования: n1=0.12 кг·м2/с;
- параметры акселерометра:
- масса обода и балок: m=7·10-3 кг;
- коэффициент демпфирования: k∂=15 кг/с;
- коэффициент жесткости: kакс=3.93·105 кг/с2;
- параметры акселерометра в наиболее близком аналоге:
- масса балок: m3=2.8·10-4 кг;
- коэффициент демпфирования: k∂3=15 кг/c
- коэффициент жесткости: kакс3=3.93·105 кг/с2.
При постоянной входной угловой скорости и линейном ускорении по оси Oξ и нулевых угловых скоростях и линейных ускорениях по осям Оη и Oζ, прибор будет иметь следующие масштабные коэффициенты:
а) гироскоп:

б) гироскоп в наиболее близком аналоге:

в) акселерометр:

г) акселерометр в наиболее близком аналоге:

Из формул (7)...(10) видно, что из-за введения дополнительных пар балок и ободов происходит увеличение масштабного коэффициента гироскопа в 3 раза, а акселерометра в 25 раз.
Таким образом, поставленная задача решена. Чувствительность прибора повышена благодаря использованию дополнительных пар балок гироскопов и акселерометров, а также благодаря введению ободов.
Источники информации:
1. Killian Kevin M., Patent USA Number 4900918 Resonant fiber optic accelerometer with noise reduction using a closed loop feedback to vary pathlength.
2. Califano Herbert Т., Patent USA Number 5099690 Fiber-optic gyroscope accelerometer.
3. Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике. - M.: Наука, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| Устройство определения параметров перемещения и размеров объектов | 1990 |
|
SU1825975A1 |
| Лазерный волоконный гироскоп | 1981 |
|
SU972923A1 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 2011 |
|
RU2488773C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА КОЛЬЦЕВОГО ИНТЕРФЕРОМЕТРА ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА С ОТКРЫТЫМ КОНТУРОМ | 2000 |
|
RU2176775C1 |
| ВЫСОКОСТАБИЛЬНЫЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2003 |
|
RU2286581C2 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 2011 |
|
RU2507482C2 |
| СПОСОБ УМЕНЬШЕНИЯ ВРЕМЕНИ ТОЧНОСТНОЙ ГОТОВНОСТИ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 2012 |
|
RU2512598C1 |
| Оптический блок волоконного оптического гироскопа | 2024 |
|
RU2829833C1 |
Изобретение относится к приборам ориентации и навигации подвижных объектов. Инерциальный измерительный прибор включает гироскоп и акселерометр, установленные на полом валу, который имеет шарикоподшипниковые опоры, ротор синхронного двигателя, растр оптического датчика положения, установленные на полом валу, статор синхронного двигателя, излучатель и светоприемник оптического датчика положения, установленные на корпусе прибора. Чувствительными элементами гироскопа и акселерометра являются пары балок прямоугольного сечения, ширина которых существенно больше высоты, прикрепленные к валу перпендикулярно к оси вращения таким образом, что для гироскопа более широкая сторона балки лежит в плоскости, перпендикулярной оси вращения вала, а для акселерометра более узкая сторона балки лежит в плоскости, перпендикулярной оси вращения вала. Также в состав прибора включены две пары балок и два обода, дополнительная пара балок для гироскопа по форме аналогична уже имеющимся и установлена на валу перпендикулярно уже имеющимся таким образом, что продольные оси всех четырех балок лежат в одной плоскости, а более узкие стороны дополнительных балок лежат в плоскости, перпендикулярной оси вращения, с балками гироскопа жестко соединен обод, представляющий собой полый цилиндр, по высоте равный ширине балки, дополнительная пара балок для акселерометра по форме аналогична уже имеющимся и установлена на валу параллельно-последовательно уже имеющимся на расстоянии, равном ширине балки, с балками акселерометра жестко соединен обод, представляющий собой полый цилиндр, по высоте равный трехкратной ширине балки. Технический результат: повышение чувствительности прибора. 19 ил.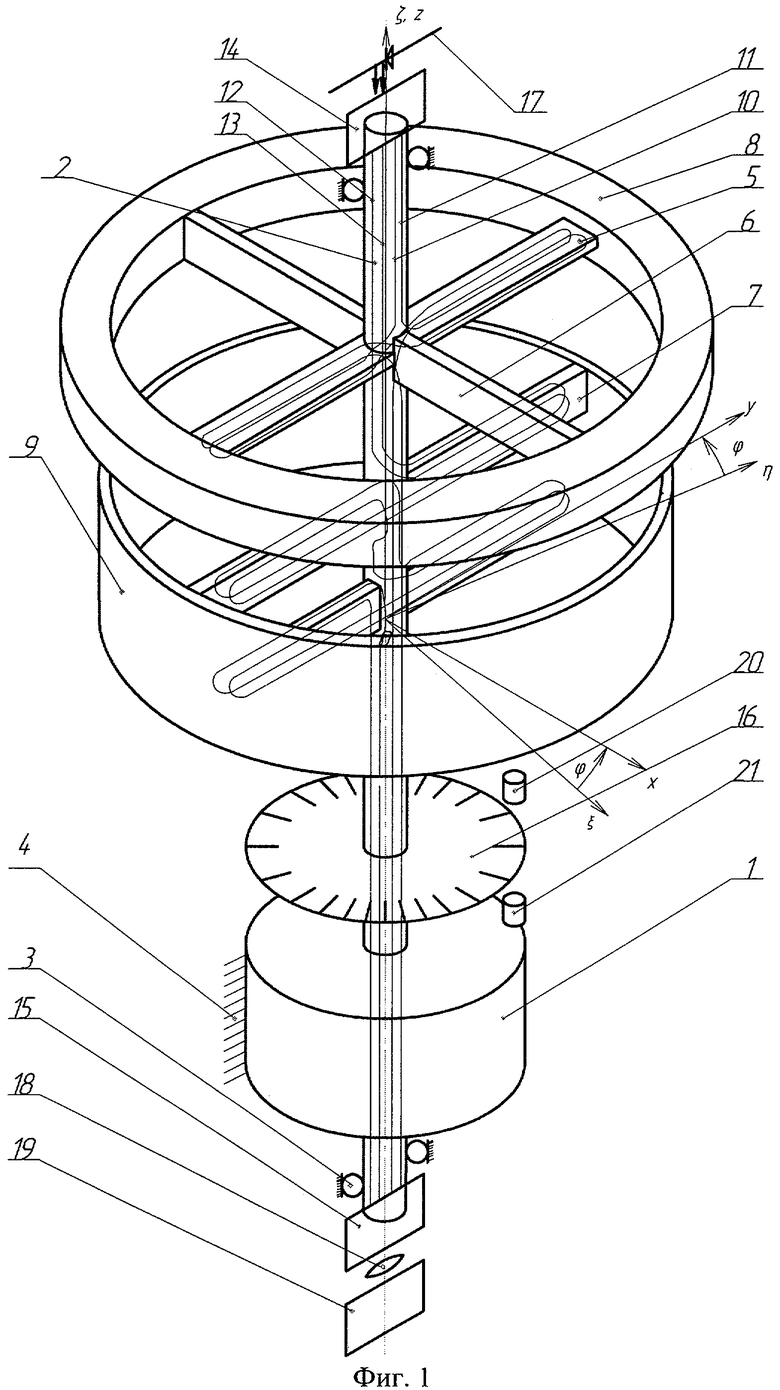
Инерциальный измерительный прибор, включающий гироскоп и акселерометр, установленные на полом валу, который имеет шарикоподшипниковые опоры, ротор синхронного двигателя, растр оптического датчика положения, установленные на полом валу, статор синхронного двигателя, излучатель и светоприемник оптического датчика положения, установленные на корпусе прибора, чувствительными элементами гироскопа и акселерометра являются пары балок прямоугольного сечения, ширина которых существенно больше высоты, прикрепленные к валу перпендикулярно к оси вращения таким образом, что для гироскопа более широкая сторона балки лежит в плоскости, перпендикулярной оси вращения вала, а для акселерометра более узкая сторона балки лежит в плоскости, перпендикулярной оси вращения вала, с чувствительными элементами гироскопа, акселерометра и полым валом связаны изолированные друг от друга контуры световолокон таким образом, что для гироскопа контуры световолокон проходят внутри полого вала до и после пересечения с балками гироскопа, где контуры световолокон укладываются витками один вдоль верхней поверхности одной из балок, а другой вдоль нижней поверхности этой же балки, на другой балке световолокно, уложенное вдоль верхней поверхности первой балки, укладывается вдоль нижней поверхности второй балки, а световолокно, уложенное вдоль нижней поверхности первой балки, укладывается вдоль верхней поверхности второй балки, а для акселерометра контуры световолокон проходят внутри полого вала до и после пересечения с балками акселерометра, где контуры световолокон укладываются витками один вдоль передней поверхности пары балок, а другой вдоль задней поверхности, в каждом контуре один конец соединен со светоделителем, являющимся оптическим приемником, расположенным напротив излучающей поверхности светодиода, вторые концы контуров попарно соединены с сумматором света и расположены на торце полого вала напротив соответствующих каждому из них двух фотоприемников, закрепленных на корпусе так, что каждый из них вместе со светодиодом, светоделителем, соответствующим контуром световолокна, сумматором света образуют два интерферометра Маха-Цендера, один интерферометр соответствует гироскопу, второй интерферометр - акселерометру, выход каждого фотоприемника соединен со входами первого и второго блоков, включающих по усилителю и фильтру, выходы этих блоков соединены с первыми входами первого и второго фазовых демодуляторов соответственно, второй вход первого фазового демодулятора соединен с выходом оптического датчика положения с нулевым начальным фазовым сдвигом, второй вход второго фазового демодулятора соединен с выходом оптического датчика положения с начальным фазовым сдвигом, равным 90°, выходы четырех фазовых демодуляторов, соединены со входами четырех выходных блоков, содержащих по усилителю и фильтру, выходы двух из них являются выходами инерциального измерительного прибора по двум компонентам абсолютной угловой скорости подвижного объекта по осям, перпендикулярным оси вращения полого вала, выходы двух других выходных блоков являются выходами по двум компонентам кажущегося ускорения подвижного объекта по тем же осям, отличающийся тем, что дополнительно введены две пары балок и два обода, дополнительная пара балок для гироскопа по форме аналогична уже имеющимся и установлена на валу перпендикулярно уже имеющимся таким образом, что продольные оси всех четырех балок лежат в одной плоскости, а более узкие стороны дополнительных балок лежат в плоскости, перпендикулярной оси вращения, с балками гироскопа жестко соединен обод, представляющий собой полый цилиндр, по высоте равный ширине балки, дополнительная пара балок для акселерометра по форме аналогична уже имеющимся и установлена на валу параллельно - последовательно уже имеющимся на расстоянии, равном ширине балки, расположение волокон в них аналогично уже имеющимся, с балками акселерометра жестко соединен обод, представляющий собой полый цилиндр, по высоте равный трехкратной ширине балки.
| US 5099690 А, 31.03.1992 | |||
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК[ПЛТШИС-кtaVltoAH' | 0 |
|
SU349961A1 |
| US 4755051 А, 05.07.1988 | |||
| US 4743116 А, 10.05.1988 | |||
| Приспособление для нанесения на чертежах, планах и т.п. надписей, условных знаков и т.п. | 1933 |
|
SU33974A1 |

