ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится как правило к области электрической защиты и защиты по питанию.
Более подробно, настоящее изобретение относится к электрическому устройству отключения, такому как разъединитель, включающему в себя корпус, два неподвижных контакта, закрепленных в корпусе, подвижный контакт, выборочно прикладываемый к неподвижным контактам, исполнительный механизм, включающий в себя привод, для выборочного перемещения подвижного контакта к неподвижным контактам, и средства привода для выборочного отсоединения подвижного контакта от неподвижных контактов.
Такое устройство может, благодаря своей конструкции, принимать более чем одно состояние, как правило это зависит только от положения привода и положения средств привода.
Фактически, изобретение основано на обнаружении того факта, что устройство может принимать состояние, которое также зависит от положения подвижного контакта, который может случайно остаться присоединенным к неподвижным контактам, даже после активирования средств привода.
Изобретение в этом контексте относится к устройству отключения тока, снабженному средством для различения его состояния путем различения его от других состояний, которые оно способно принимать.
В наиболее предпочтительном воплощении, изобретение позволяет распознавать каждое из состояний, которое способно принимать это устройство.
Для этого устройство, согласно изобретению, которое также содержит признаки, указанные выше, характеризуется тем, что привод содержит рычаг управления, шарнирно установленный на корпусе, снабженный ступицей, один участок которой виден снаружи корпуса, эксцентрик, прикрепленный к рычагу управления, и шатун (соединительный рычаг), приводимый от эксцентрика, при этом исполнительный механизм содержит ведущий ползун, несущий подвижный контакт и смещаемый в первом направлении первой силой упругости, причем рычаг управления, способный шарнирно перемещаться из исходного положения в рабочее положение и действующий путем подсоединения шатуна в положение зацепления, обеспечивающий выборочное перемещение ползуна путем скольжения относительно корпуса из нерабочего положения в рабочее положение во втором направлении, которое противоположно первому направлению, вдоль первой оси, проходящей меду двумя неподвижными контактами, причем ползун достигает своего рабочего положения, когда рычаг управления находится в рабочем положении, при этом видимый участок ступицы рычага управления имеет первый знак состояния, видимый снаружи корпуса, когда рычаг управления находится в исходном положении, и закрыт корпусом, когда рычаг управления занимает любое положение, при котором шатун находится в зацепленном положении, ползун занимает положение между своим рабочим положением и промежуточным положением между рабочим и нерабочим положениями.
Устройство согласно изобретению может также включать в себя подвижный индикатор состояния, занимающий положение, в соответствии с положением ползуна, и несущий второй знак состояния, скрытый корпусом, когда ползун находится в нерабочем положении, и видимый снаружи корпуса в любом положении ползуна между его промежуточным положением и рабочим положением.
Этот подвижный индикатор состояния может также предпочтительно иметь третий знак состояния, видимый снаружи корпуса, когда ползун находится в нерабочем положении, закрытый корпусом в любом положении ползуна между его промежуточным положением и рабочим положением.
В этом случае, корпус и третий знак состояния имеют, например, один цвет, в то время как первый знак состояния, второй знак состояния и корпус имеют три разных цвета.
Изобретение предпочтительно, когда рычаг управления имеет соединительное средство, и устройство принимает форму модуля, выборочно соединяемого с по меньшей мере одним эквивалентным модулем, причем рычаги управления соединенных модулей крепятся друг к другу при помощи по меньшей мере указанного соединительного средства и все занимают одинаковое положение.
Первый конец шатуна может быть шарнирно соединен с эксцентриком, второй конец шатуна выборочно удерживается, когда шатун находится в зацепленном положении в ушке (петле), образованном вытянутым отверстием в ползуне.
В этом случае средство привода включает в себя, например, передаточный механизм и замок откидного рычага, который установлен на ползуне и содержит первый откидной (наклонный) рычаг, выборочно управляемый передаточным механизмом для отцепления ползуна от привода путем перевода шатуна в расцепленное (разъединенное) состояние, в котором второй конец указанного шатуна освобожден из ушка и свободно скользит в вытянутом отверстии ползуна.
Предпочтительно, подвижный контакт удерживается ползуном c возможностью свободного скольжения и смещен относительно ползуна второй силой упругости, действующей во втором направлении, указанный подвижный контакт, когда ползун занимает рабочее положение, прижат под действием второй силы упругости к неподвижным контактам, а когда ползун занимает нерабочее положение, прижат под действием второй силы упругости к упору ползуна и отсоединен от неподвижных контактов.
Замок откидного рычага может также быть расположен так, чтобы выборочно принимать замкнутое положение и незамкнутое положение, при этом в замкнутом положении первый рычаг под действием третьей силы упругости находится в первом относительном положении вращения по отношению к ползуну, в котором вышеуказанный первый рычаг выборочно определяет зацепленное состояние шатуна в ушке, которое образовано вырезом первого рычага и откосом (наклоном), образованным первым концом отверстия ползуна, имеющим ненулевой наклон по отношению к первой оси.
В разомкнутом состоянии первый рычаг размещен посредством передаточного механизма, действующего против третьей силы упругости, во втором относительном положении вращения по отношению к ползуну, в котором ушко открыто путем относительного отделения выреза первого рычага от первого откоса и обеспечивает перемещение шатуна из зацепленного положения в расцепленное положение путем скольжения второго конца по первому откосу и свободного скольжения второго конца в отверстии ползуна на по меньшей мере части хода, который ползун проходит между рабочим положением и нерабочим положением.
Предпочтительно, при перемещении рычага управления из исходного положения в рабочее положение, когда шатун находится в зацепленном положении, вышеуказанный шатун проходит через промежуточное положение, в котором он выровнен с первой осью своим первым и вторым концами.
Дополнительно, вырез первого рычага предпочтительно имеет второй откос и, когда рычаг управления находится в рабочем положении и шатун находится в состоянии зацепления, второй конец рычага оказывает на первый откос и второй откос первую и вторую силы давления, первая из которых больше чем вторая, по меньшей мере в два раза.
Также предпочтительно, рычаг управления смещен к своему исходному положению под действием четвертой силы упругости, при этом вырез первого рычага ограничен третьим откосом, имеющим легкий наклон по отношению к шатуну в расцепленном состоянии, чтобы, когда рычаг управления находится в рабочем положении, а шатун находится в расцепленном положении, второй конец шатуна вынуждал первый рычаг временно перейти из первого во второе относительное положение вращения под действием четвертой силы упругости путем скольжения в контакте с третьим откосом.
В предпочтительном варианте воплощения изобретения шатун состоит из U-образного наконечника, имеющего первую и вторую боковые ветви, образующие первый и второй концы этого шатуна, соответственно, и взаимно соединенные общим основанием.
Передаточный механизм содержит второй рычаг, установленный с возможностью откидывания в корпусе и имеющий рельеф, выборочно приводимый от внешней подвижной шпильки, проходящей в корпус через первое окно, образованное в корпусе, и кинематическое соединение, определяющее положение вращения первого рычага в соответствии с по меньшей мере одним положением вращения второго рычага, и содержащее по меньшей мере одну подающую шпильку, опирающуюся на второй рычаг.
Кинематическое соединение также содержит третий рычаг, установленный с возможностью откидывания в корпусе, выборочно приводимый вторым рычагом и содержащий ведущий палец в контакте с первым рычагом, а также паз, в котором установлена с возможностью скольжения подающая шпилька второго рычага, причем второй и третий рычаги осуществляют соответствующие вращательные движения меньшей угловой амплитуды и большей угловой амплитуды, в ходе перемещения первого рычага из его первого во второе относительное положение вращения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие особенности и преимущества настоящего изобретения станут ясны из нижеследующего описания, приведенного в виде примера, со ссылками на прилагаемые чертежи, на которых:
Фиг.1 изображает поэлементный общий вид устройства, согласно изобретению;
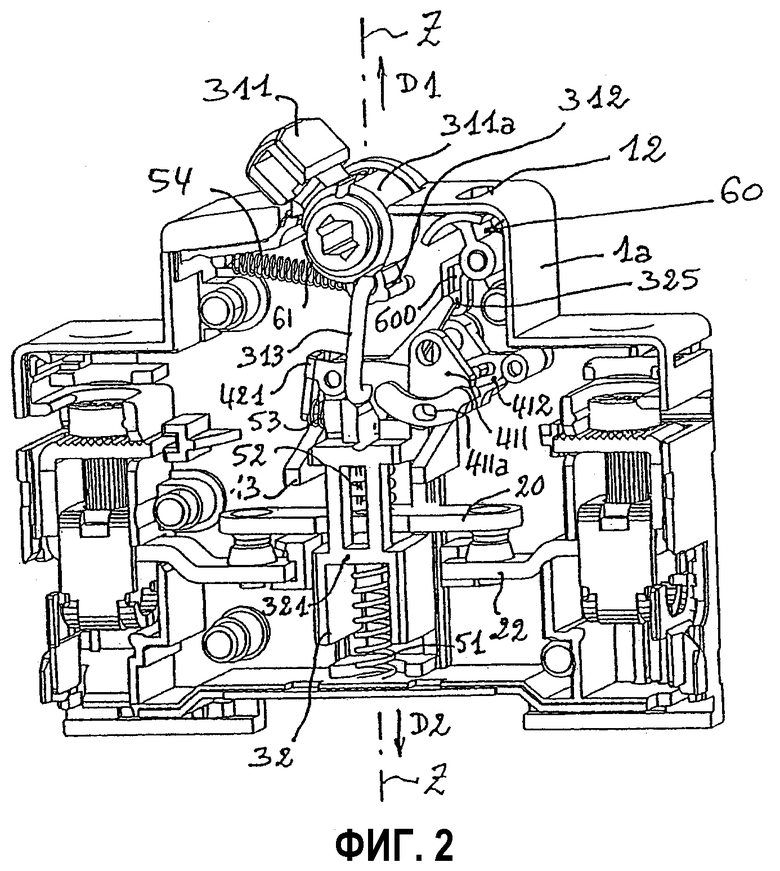
Фиг.2 - общий вид спереди устройства без крышки, где рычаг управления занимает рабочее положение, согласно изобретению;
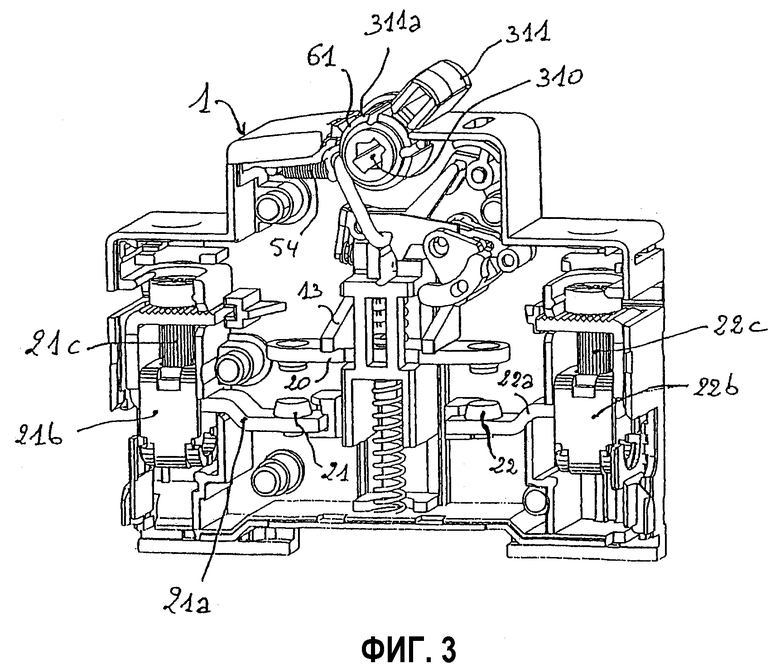
Фиг.3 - общий вид спереди устройства без крышки, где рычаг управления находится в нерабочем положении, согласно изобретению;
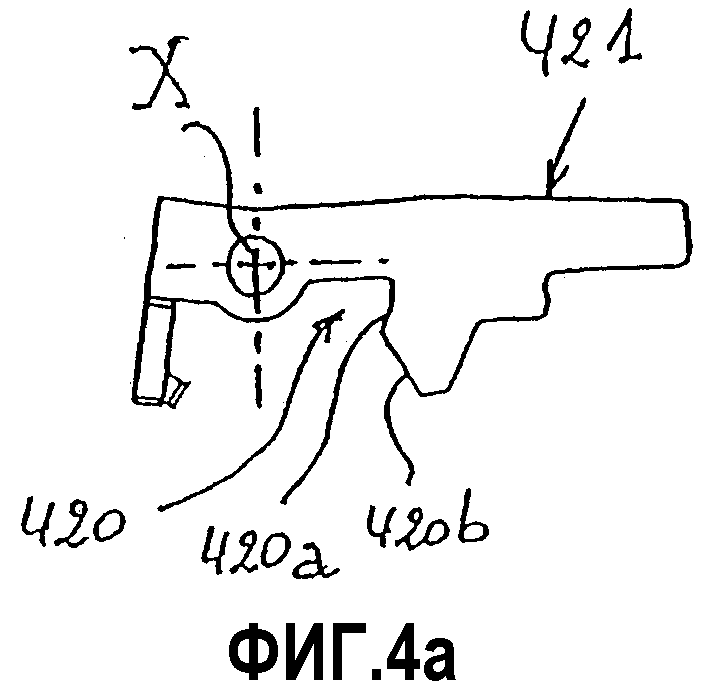
Фиг.4а - вид сбоку первого рычага, используемого в устройстве, согласно изобретению;
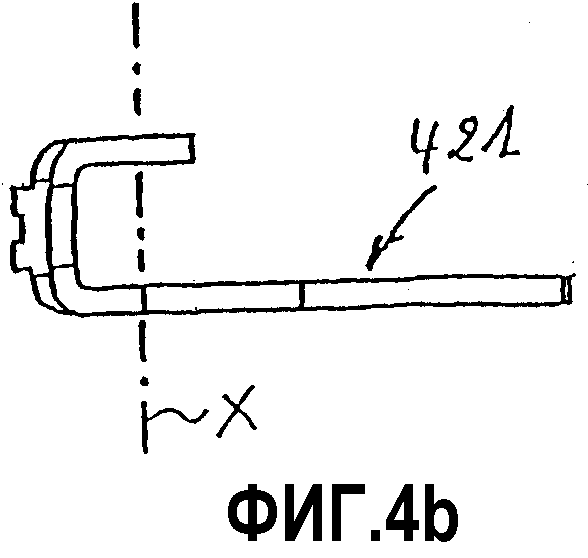
Фиг.4b - вид сверху первого рычага, согласно изобретению;
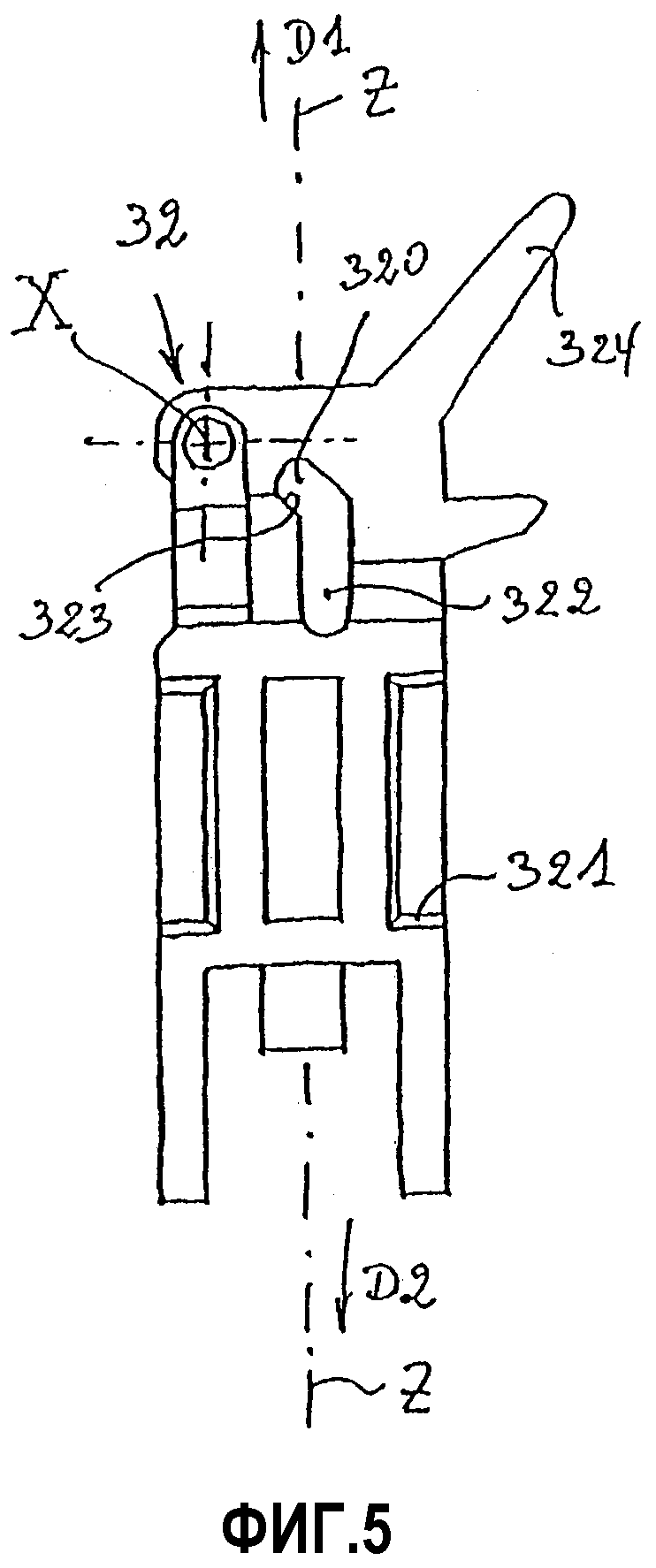
Фиг.5 - вид сбоку ползуна, используемого в устройстве, согласно изобретению;
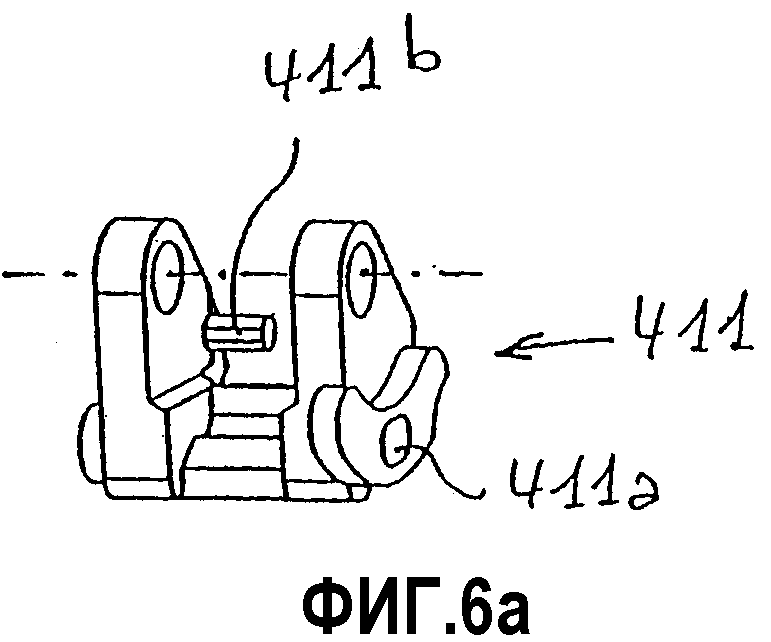
Фиг.6а - общий вид второго рычага, используемого в устройстве, согласно изобретению;
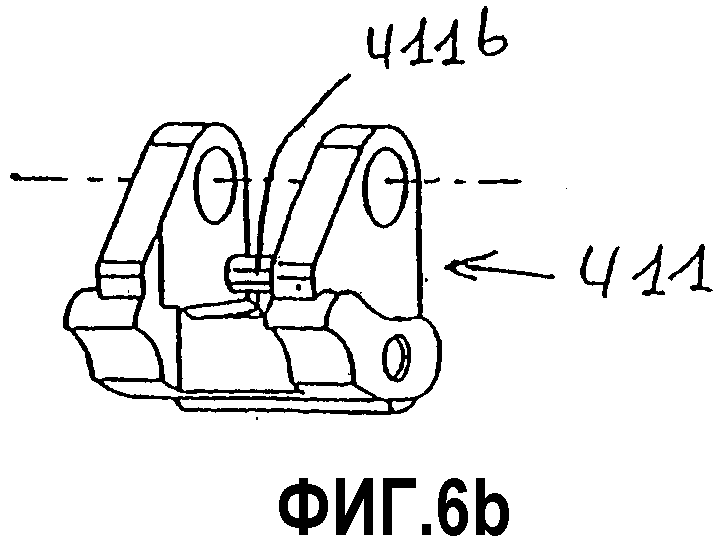
Фиг.6b - общий вид второго рычага, согласно изобретению;
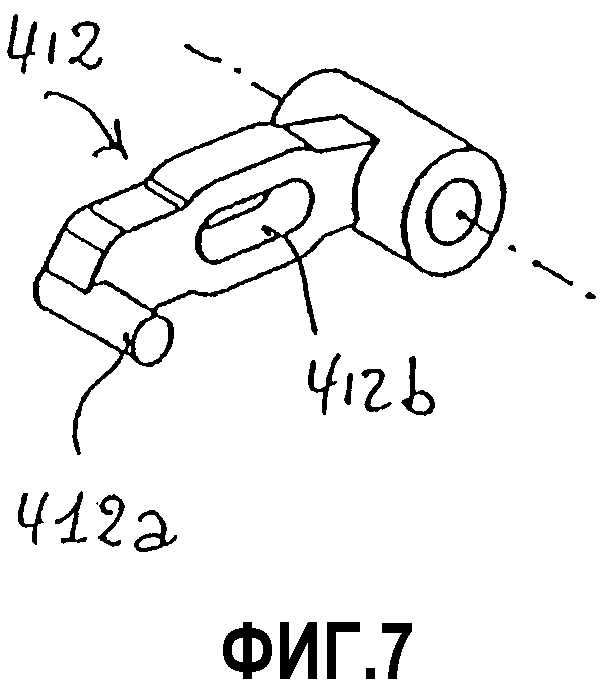
Фиг.7 - общий вид третьего рычага, используемого в устройстве, согласно изобретению;
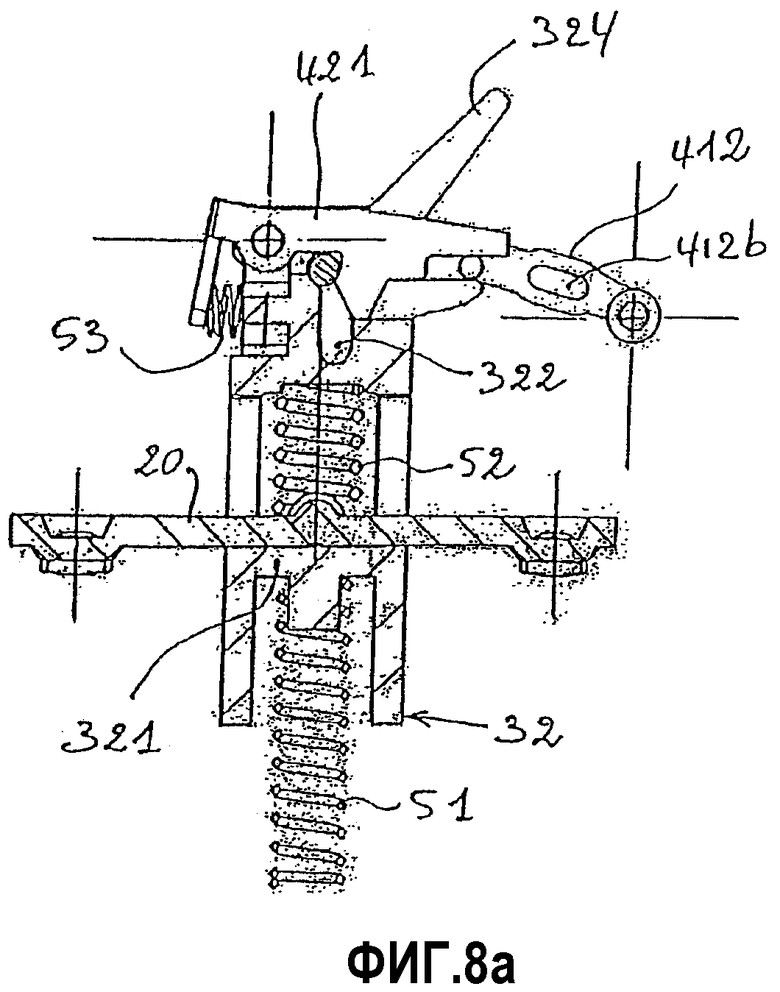
Фиг.8а - вид сбоку предварительной сборки устройства, где первый рычаг находится в первом относительном положении вращения по отношению к ползуну, согласно изобретению;
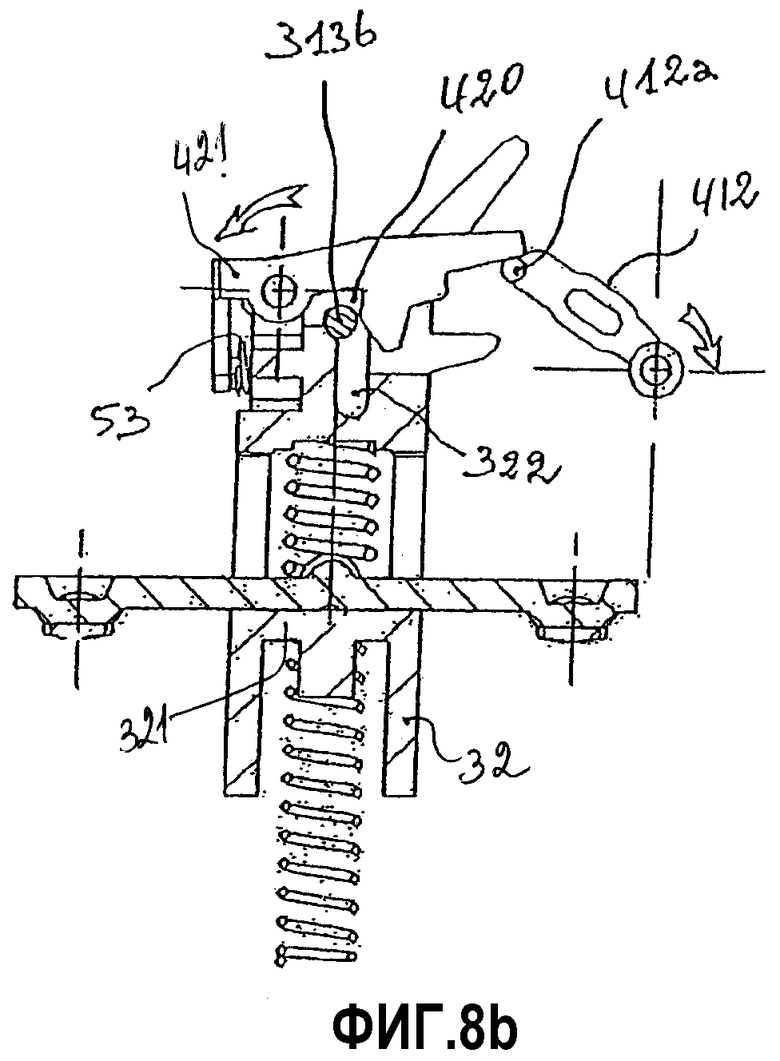
Фиг.8b - вид сбоку предварительной сборки, где первый рычаг находится во втором относительном положении вращения по отношению к ползуну, согласно изобретению;
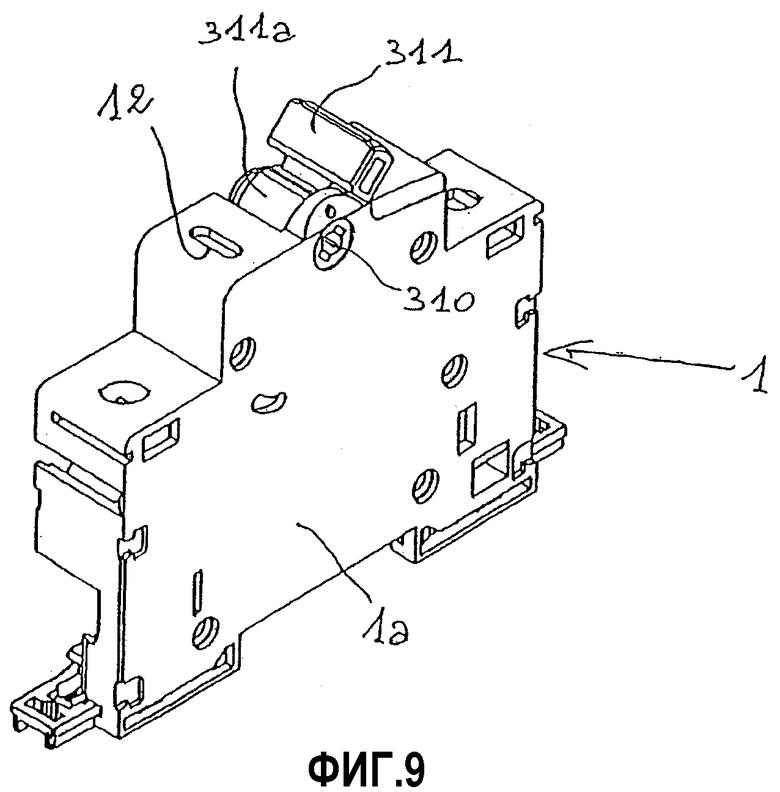
Фиг.9 - общий вид устройства со стороны его основания, причем рычаг управления показан в рабочем положении, согласно изобретению.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству отключения электричества и более точно к разъединителю, способному приводиться в действие при помощи вспомогательного элемента (не показан).
Устройство в форме модуля содержит корпус 1 (фиг.1), состоящий из основания 1а и крышки 1b.
Корпус 1 имеет два неподвижных контакта 21 и 22, приклепанных к соответствующим проводящим опорам 21а и 22а и соединенных с соответствующими желобковыми скобами 21b и 22b, в которых удерживаются неподвижно входные и выходные проводники (не показаны) путем затягивания соответствующих винтов 21с и 22с.
Электрический контакт между входным и выходным проводниками может быть осуществлен или прерван при помощи подвижного контакта 20.
Более подробно, подвижный контакт 20 выборочно прикладывается к неподвижным контактам 21 и 22 посредством исполнительного механизма 3 и отсоединяется от неподвижных контактов 21 и 22 при помощи средства 4 привода.
Исполнительный механизм 3 содержит привод 31 и ведущий ползун 32.
Ползун 32, который поддерживает подвижный контакт 20, подвергается смещению под действием силы упругости, оказываемой первой пружиной 51 в направлении D1 (по направлению к верху чертежа), и под действием движущей силы, которую привод 31 может оказывать на него при определенных условиях в направлении D2, которое противоположно первому направлению D1 (следовательно, направлено к низу чертежа).
Ползун может быть приведен в движение относительно корпуса 1 вдоль оси Z, проходящей между двумя неподвижными контактами 21 и 22, из нерабочего положения (фиг.3) в рабочее положение (фиг.2) под действием привода 31 и из рабочего положения в нерабочее положение под действием пружины 51.
Для обеспечения оптимального электрического контакта, когда ползун 32 занимает рабочее положение, подвижный контакт 20 поддерживается ползуном 32 так, что он может свободно скользить, и подвергается, по отношению к ползуну 32, смещению под действием силы упругости, оказываемой второй пружиной 52 во втором направлении D2.
Когда ползун 32 занимает рабочее положение, подвижный контакт 20 прижимается к неподвижным контактам 21 и 22 под действием пружины 52, а когда ползун 32 находится в нерабочем положении, подвижный контакт 20 прижимается к упору 321 ползуна под действием пружины 52, принимая положение, в котором он отсоединен от неподвижных контактов 21 и 22.
Упоры 13 (фиг.2 и 3) установлены в корпусе 1, чтобы ограничить ход подвижного контакта 20 и ползуна 32 под действием силы, оказываемой пружиной 51.
Согласно важной особенности изобретения, средство 4 привода содержит передаточный механизм 41 и замок 42, установленные на ползуне 32.
Замок 42, который может в любой момент регулироваться передаточным механизмом 41, чтобы отсоединить ползун 32 от привода 31, по существу включает в себя рычаг 421, установленный с возможностью откидывания на ползуне 32 по оси Х.
Этот откидной рычаг (фигуры 4а, 4b и 8а, 8b) в виде скобы закрывает верхний конец ползуна 32 и постоянно смещается пружиной 53 по направлению к первому относительному положению вращения по отношению к ползуну 32 (фиг.8а). Замок 42 тогда занимает так называемое «замкнутое» положение.
Привод 31 (фиг.1) содержит рычаг 311 управления, шарнирно установленный в корпусе 1 при помощи ступицы 311а, эксцентрика 312, прикрепленного к рычагу управления 311, и шатуна 313.
Шатун 313 состоит из U-образного наконечника, имеющего две боковые ветви 313а и 313b, соединенные общим основанием 313с, причем ветви 313а и 313b составляют верхний и нижний концы шатуна 313.
Специалисту в данной области техники ясно, что термины «верхний» и «нижний» являются традиционными, когда они характеризуют частную ориентацию устройства.
Верхний конец 313а (фиг.2, 3) шатуна 313 шарнирно присоединен к эксцентрику 312, в то время как нижний конец 313b этого шатуна зацепляется за вытянутое отверстие 322 (фиг.5) в ползуне 32.
Отверстие 322 по существу параллельно оси Z на своем нижнем участке, но на верхнем участке оно отклоняется, образуя наклонный по отношению к оси Z откос 323.
Откидной рычаг 421 (фиг.4а) имеет вырез 420, который, когда замок 42 находится в замкнутом положении, сообщается с верхним наклонным участком отверстия 322 для образования ушка 320, предпочтительно замкнутого, в котором может прочно удерживаться нижний конец 313b шатуна 313.
Таким образом, когда шатун 313 принимает так называемое зацепленное положение, которое определяется тем, что шатун прочно удерживается в ушке 320 своим нижним концом 313b, этот конец 313b удерживается в ушке 320 при помощи выреза 420 в откидном рычаге 421 и при помощи откоса 323, имеющего ненулевой наклон относительно оси Z, образованного верхним концом отверстия 322 ползуна 32.
Однако откидной рычаг 421 (фиг.8b) может быть передвинут передаточным механизмом 41, действующим против пружины 53, до тех пор, пока он не достигнет другого относительного положения вращения по отношению к ползуну 32, в котором ушко 320 открывается путем относительного отделения выреза 420 откидного рычага 421 от откоса 323 отверстия 322 ползуна 32, в котором замок 42 принимает так называемое незамкнутое положение.
Если шатун 313 находится в своем зацепленном положении, когда замок 42 переходит от замкнутого положения в незамкнутое положение, эта ситуация точно соответствует показанному на фиг.8а, тогда нижний конец 313b шатуна скользит по откосу 323 под действием силы, оказываемой по меньшей мере пружиной 51, которая толкает ползун 32 вверх, и свободно проскальзывает в отверстие 322 ползуна 32 на по меньшей мере части хода, который ползун совершает между его рабочим положением и его нерабочим положением.
Шатун 313 таким образом перемещается из его зацепленного положения в так называемое «расцепленное» положение.
Когда шатун находится в расцепленном положении, ползун 32 отцепляется от привода 31 и возвращается в свое нерабочее положение, так как он больше не подвергается действию пружины 51.
Однако, когда шатун 313 занимает зацепленное положение, привод 31 может при помощи этого шатуна перемещать ползун 32 в его рабочее положение в направлении D2 (в этом случае вниз) путем поворота рычага 311 управления из его исходного положения (фиг.3) в его рабочее положение (фиг.2), причем рабочее положение рычага 311 управления помещает ползун 32 в его рабочее положение.
На фиг.8а и 8b показано, что ведущий палец 412а может скользить по первому рычагу 421 в ходе привода, что подчеркивает важность сборки замка откидного рычага на ползуне.
Действительно, при использовании этой сборки и при обеспечении возможности скольжения ведущего пальца 412а относительно рычага 421, становится возможным рассматривать приведения пальца 412а в смещение, а не во вращение, например, путем присоединения его к рейке, приводимой в смещение шестерней, которая приводится во вращение через окошко в округлой арке 11.
В соответствии с другим вариантом воплощения, движение сдвига пальца 412а может быть непосредственно передано снаружи корпуса через окошко 11, но в прямолинейной форме.
Таким образом, сборка замка откидного рычага на ползуне фактически выходит за рамки основной задачи изобретения, т.е. обеспечения возможности использования приводного движения в круглой арке для прямолинейного движения ползуна, и предусматривает широкое разнообразие преобразований движения.
Для обеспечения стабильности рабочего и нерабочего положений ползуна 32, привод 31 снабжен приспособлением типа, известного специалистам в данной области техники как «шаровой шарнир» или модуль «за нейтральным положением», определяемым тем, что когда рычаг управления 311, при расположении шатуна в зацепленном положении, переходит от его начального положения в рабочее положение, шатун проходит через промежуточное положение, в котором сжатие пружины 51 является максимальным, и прямая линия, образованная концами 313а и 313b этого шатуна, выровнена с осью Z, где расположен центр вращения эксцентрика 312.
Как показано на фиг.4а, вырез 420 первого рычага 421 имеет откос 420а, который вместе с откосом 323 отверстия 322 ползуна 32 предназначен для противодействия силы давления, которую конец 313b шатуна, когда он находится в зацепленном положении, оказывает на ушко 320, когда рычаг управления 311 занимает рабочее положение.
Однако для осуществления приводного действия, которое заставляет рычаг 421 перемещаться из первого во второе относительное положение вращения, очень медленно, откос 420а выреза 420 образует угол с направлением шатуна 313 (фиг.2), который значительно меньше, чем угол с тем же направлением, образованный откосом 323 отверстия 322 ползуна.
Таким образом, конец 313b шатуна 313 оказывает на откосы 323 и 420а первую и вторую силы давления, первая из которых значительно больше, чем вторая, и составляет по меньшей мере в два раза больше опорной силы, оказываемой на откос 420а.
Кроме того, вырез 420 первого рычага 421 ограничен другим откосом 420b (фиг.4а), имеющим небольшой наклон по отношению к шатуну 313, когда он находится в расцепленном положении, и рычаг управления смещается к его исходному положению под действием пружины 54.
Таким образом, когда рычаг управления 311 занимает рабочее положение, и шатун 313 занимает расцепленное положение, нижний конец 313b этого шатуна 313 входит в скользящий контакт с откосом 420b под действием силы, оказываемой пружиной 54, и поднимает первый рычаг 421, заставляет его временно перейти из первого во второе относительное положение вращения, до тех пор, пока он прочно удерживается в ушке 320.
Передаточный механизм 41 содержит по меньшей мере один рычаг 411 и кинематическое соединение.
Второй рычаг 411 (фиг.1-3, 6а, 6b) с возможностью откидывания установлен в корпусе 1 и имеет рельеф 411а, например, паз, который может по требованию приводиться (перемещаться) внешней подвижной шпилькой (не показана), принадлежащей вспомогательному модулю, смежному с устройством, и проходящей в корпус 1 через окошко 11 в круглой арке, образованной в корпусе 1.
Кинематическое соединение, роль которого состоит в определении положения вращения рычага 421 на основании положения вращения второго рычага 411, содержит по меньшей мере одну подающую шпильку 411b, поддерживаемую вторым рычагом 411, но также может содержать третий рычаг 412, установленный с возможностью откидывания в корпусе 1 (фиг.1-3, 7).
Третий рычаг 412, предназначенный для привода от второго рычага 411, содержит ведущий палец 412а в контакте с первым рычагом 421, а также паз 412b, в который со скольжением помещается подающая шпилька 411b второго рычага 411.
Третий рычаг предназначен для усиления углового перемещения второго рычага 411, то есть, когда первый рычаг 421 переходит из первого относительного положения вращения (фиг.8а) во второе относительное положение вращения (фиг.8b), третий откидной рычаг 412 осуществляет вращательное движение большей угловой амплитуды, чем вращательное движение второго откидного рычага 411.
Ступица 311а рычага управления 311 установлена с возможностью вращения в корпусе 1 (фиг.2), так что участок этой ступицы можно видеть снаружи корпуса 1, даже если последний является непрозрачным, что соответствует предпочтительному варианту воплощения изобретения.
Видимый участок ступицы 311а имеет первый сигнал (знак) 61 состояния (фиг.3), предназначенный для уведомления пользователя устройства о том, что электрическая цепь разомкнута, т.е. что подвижный контакт 20 отсоединен от неподвижных контактов 21 и 22.
Для этого знак 61 состояния виден снаружи корпуса 1, когда рычаг 311 управления занимает исходное положение.
Однако знак 61 состояния закрыт непрозрачной боковой стенкой корпуса 1 в любом положении рычага управления 311, для которого, когда шатун 313 находится в зацепленном положении, ползун 32 занимает положение между рабочим положением и промежуточным положением между его рабочим и нерабочим положениями.
Устройство согласно изобретению также содержит подвижный индикатор 60 состояния, который постоянно занимает положение, согласованное с положением ползуна 32.
Например, индикатор 60 также имеет форму рычага, установленного с возможностью откидывания в корпусе 1, и оборудован криволинейным пазом 600, в который крепится палец 325 (фиг.2) на расстоянии 324 (фиг.5) от хода ползуна 32.
Индикатор 60 состояния имеет второй знак 62 состояния, предназначенный для уведомления пользователя устройства о том, что электрическая цепь, регулируемая этим устройством, замкнута, т.е. что подвижный контакт 20 прижат под действием пружины 52 к неподвижным контактам 21 и 22.
Для этого, второй знак 62 состояния закрыт боковой стенкой корпуса 1, когда ползун 32 занимает нерабочее положение, но виден снаружи корпуса 1, например, через окошко 12 корпуса (фиг.1), в любом положении ползуна 32 между промежуточным положением и рабочим положением.
Первый и второй знаки 61 и 62 состояния предпочтительно имеют разные цвета, например, зеленый и красный, соответственно, и имеют цвет, отличный от цвета корпуса 1, например, желтого, чтобы обеспечить возможность оптимального распознавания состояний, о которых сигнализируют эти знаки.
Подвижный индикатор 60 состояния может также иметь третий знак 63 состояния, что предпочтительно, когда модуль, образуемый устройством, соединяется с другими смежными модулями при помощи планки (не показана), помещенной в отверстие 310 ступицы 311а каждого из соединяемых модулей.
В этом случае рычаги 311 управления различных соединенных модулей занимают одинаковое положение, даже несмотря на то, что соответствующие ползуны 32 различных модулей могут занимать разные положения.
В частности, если после активации всех соединенных модулей подвижный контакт 20 одного из этих модулей остается после поломки присоединенным к неподвижным контактам 21 и 22 этого модуля, ползуны всех неповрежденных модулей будут занимать нерабочее положение, в то время как ползун поврежденного модуля будет оставаться в рабочем положении.
Однако рычаги управления всех модулей, вместо того, чтобы вернуться в исходное положение, будут оставаться в промежуточном положении, соответствующем положению рычага управления поврежденного модуля, и при этом первый знак 61 все еще будет скрыт корпусом 1.
Чтобы отличить поврежденный модуль от неповрежденных модулей, на подвижном индикаторе положения может быть расположен третий знак 63 состояния, который можно увидеть снаружи корпуса 1 через окошко 12, когда ползун 32 занимает нерабочее положение, и который скрывается корпусом 1 в любом положении ползуна 32 между промежуточным положением и рабочим положением.
Кроме того, третий знак 63 состояния предпочтительно имеет цвет корпуса, например желтый.
Таким образом, до тех пор, пока ползун поврежденного модуля остается в рабочем положении, это состояние отражается вторым знаком 62 модуля, который является красным в вышеописанном примере.
Однако до тех пор, пока ползуны неповрежденных модулей находятся в нерабочем положении, будет виден лишь третий знак 63 этих модулей, который например окрашен в желтый цвет, так как первый знак 61 зеленого цвета будет скрыт корпусом из-за промежуточного положения, в котором находятся рычаги управления сборки соединенных модулей.
Таким образом, не только наблюдения за окошком 12 сборки соединенных модулей делает возможным идентифицировать модуль (модули), которые могли быть повреждены, а также отсутствие первого знака 61 состояния в любом из соединенных модулей будет указывать на неисправность в по меньшей мере одном из этих модулей.
Специалисту в данной области техники после прочтения описания легко понять, что знаки 61-63 состояния могут быть применены не только в устройстве отключения электричества, в котором движение привода и движение подвижного контакта относятся к разным типам, а более часто в устройстве отключения электричества, оборудованном приводом 31 и ползуном 32, независимо от конкретной формы, которой обладают средства 4 привода.
Изобретение относится к области электротехники, в частности к устройству отключения электрического тока, содержащему корпус, два неподвижных контакта, подвижный контакт, регулировочный механизм, включающий в себя привод для перемещения подвижного контакта по направлению к подвижным контактам, и размыкающее средство для выборочного отсоединения подвижного контакта от неподвижных контактов. В соответствии с изобретением привод содержит рычаг, который шарнирно установлен на корпусе и который снабжен ступицей, участок которой виден снаружи корпуса, указанный участок имеет индикатор состояния, который можно увидеть снаружи корпуса, когда рычаг занимает исходное положение, и который закрыт корпусом, когда рычаг занимает любое положение, в котором подвижный контакт прикладывается к неподвижным контактам, или в приближенном положении. Технический результат - обеспечение электрической защиты, в частности защиты по питанию. 15 з.п. ф-лы, 12 ил.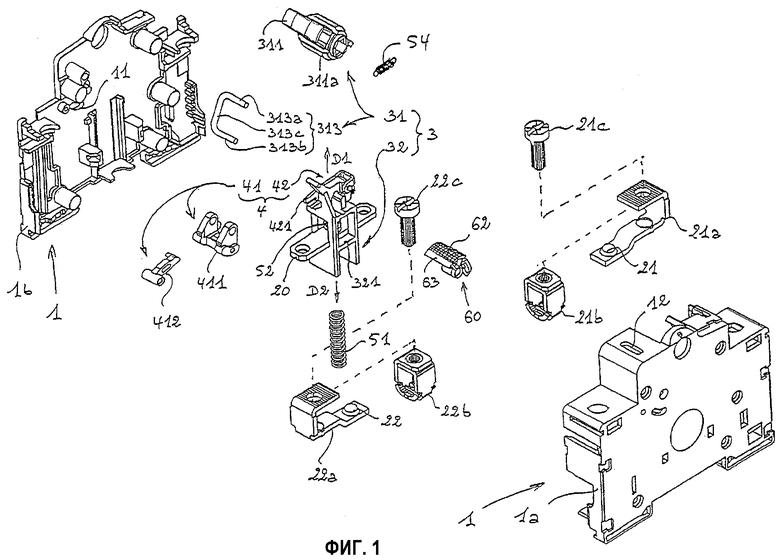
| СПОСОБ ПЛАСТИФИКАЦИИ ЭФИРОВ ЦЕЛЛЮЛОЗЫ | 0 |
|
SU362846A1 |
| РЕКЛОУЗЕР (АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ ВОЗДУШНЫХ ЛИНИЙ) СЕРИИ TEL | 1997 |
|
RU2142187C1 |
| US 4529951 A, 16.07.1985 | |||
| DE 20303897 U, 28.05.2003 | |||
| ЕР 0452230 A1, 16.10.1991. | |||

