Изобретение относится к измерительной технике и может быть использовано для уменьшения систематических погрешностей абсолютных измерений индукции магнитного поля магнитометром с четырехконтактным датчиком Холла.
Основными систематическими погрешностями, ограничивающими точность измерения индукции магнитного поля с помощью датчика Холла, являются остаточное напряжение, термоЭДС холловских контактов и температурная зависимость константы Холла [1].
Известен способ компенсации температурной погрешности путем питания датчика от источника переменного напряжения, реализованный в милитеслометре Т-2 ВНИИМ [1] и основанный на том, что температурные зависимости константы Холла и входного сопротивления датчика близки. Дополнительная компенсация температурной погрешности достигается включением терморезистора в цепь питания датчика. Недостатком данного способа является недостаточная компенсация температурной погрешности, связанная с вкладом во входное сопротивление датчика сопротивления токовых проводов и контакта металл-полупроводник. Помимо этого, компенсацию температурной погрешности ограничивает разность температур терморезистора и датчика, а также отклонение температурной зависимости сопротивления терморезистора от идеальной. Кроме того, данный способ не позволяет исключить погрешность, обусловленную остаточным напряжением.
Известен способ термостабилизации датчика Холла, основанный на измерении температуры датчика Холла с последующим использованием результата измерения для поддержания температуры датчика постоянной, причем отклонение температуры определяется по амплитуде остаточного напряжения, а направление отклонения - по фазе остаточного напряжения [2]. Недостатком данного способа является недостаточная компенсация температурной погрешности, связанная с фазовыми погрешностями, вносимыми усилителем и самим датчиком Холла, а также с коммутационной помехой. Кроме того, термостабилизация существенно увеличивает размер и инерциальность датчика.
Известен способ компенсации температурной погрешности датчика Холла путем включения следящей обратной связи в цепь компенсации разбаланса датчика [3]. Недостатком данного способа является компенсация только части температурной погрешности, связанной с зависимостью от температуры концентрации носителей в датчике, а погрешность, обусловленная температурной зависимостью подвижности носителей, остается нескомпенсированной. Кроме того, подключение источников к потенциальным контактам датчика изменяет распределение тока в нем и вносит падение напряжения на контактах, что искажает результаты измерения.
Наиболее близким по своей сущности является способ, заключающийся в том, что на датчике Холла измеряются первое напряжение между первым и вторым холловскими контактами при протекании тока между первым и вторым токовыми контактами, второе напряжение между первым и вторым холловскими контактами при протекании тока между вторым и первым токовыми контактами, третье напряжение между первым и вторым токовыми контактами при протекании тока между первым и вторым холловскими контактами и четвертое напряжение между первым и вторым токовыми контактами при протекании тока между вторым и первым холловскими контактами, причем мерой магнитной индукции является холловское напряжение, равное разности суммы первого и четвертого напряжений и суммы второго и третьего напряжений, а мерой остаточного напряжения является разность суммы первого и третьего напряжений и суммы второго и четвертого напряжений [4].
Недостатком этого способа является невозможность компенсировать температурную зависимость константы Холла.
Задача изобретения - уменьшение погрешностей холловского магнитометра путем компенсации температурной зависимости константы Холла.
Поставленная задача решается следующим образом. Четырехконтактный датчик Холла, содержащий первый и второй токовые контакты и первый и второй холловские контакты, является линейным четырехполюсником, причем холловское напряжение uX, пропорциональное измеряемой индукции магнитного поля В, является антивзаимным, а остаточное напряжение uH - взаимным [5]. Поэтому для первого напряжения u1 между первым и вторым холловскими контактами при протекании тока между первым и вторым токовыми контактами, второго напряжения u2 между первым и вторым холловскими контактами при протекании тока между вторым и первым токовыми контактами, третьего напряжения u3 между первым и вторым токовыми контактами при протекании тока между первым и вторым холловскими контактами и четвертого напряжения u4 между первым и вторым токовыми контактами при протекании тока между вторым и первым холловскими контактами получаем:
u1=uX+uH+uТ1+uСМ, u2=-uХ-uН+uТ1+uСМ,
u3=-uX+uH+uТ2+uСМ, u4=uX-uН+uТ2+uСМ,
где uX=К(Т)В - часть холловского напряжении, пропорциональная измеряемой индукции магнитного поля, uH(Т) - остаточное напряжение, uT1 - термоЭДС холловских контактов, uT2 - термоЭДС токовых контактов, uСМ - сумма напряжения смещения измерителя и части холловского напряжения, обусловленного магнитным полем тока i0, К(Т)=H(T)i0 - крутизна преобразования, Н(Т) - константа Холла, Т - температура датчика, В - нормальная к плоскости датчика компонента измеряемой индукции магнитного поля, i0 - ток через датчик Холла.
Следовательно,
4uX=(u1+u4)-(u2+u3), 4uH=(u1+u3)-(u2+u4).
Таким образом, при измерении описанным способом холловского напряжения исключены систематические погрешности, обусловленные остаточным напряжением датчика, термоЭДС контактов, напряжением смещения измерителя и магнитным полем тока, протекающего через датчик Холла, а остаточное напряжение измеряется по четырехзажимной схеме и не включает падение напряжения на токовых проводах, контактах металл-полупроводник, а также термоЭДС контактов и напряжение смещения измерителя.
Компенсация температурной зависимости константы Холла основана на том, что в слабых магнитных полях с индукцией, меньшей 0,1 Тл, когда существенны погрешности, обусловленные остаточным напряжением датчика, термоЭДС контактов, напряжением смещения измерителя и магнитным полем тока, протекающего через датчик Холла, зависимостью константы Холла и проводимости материала датчика от индукции магнитного поля можно пренебречь. В этом случае константа Холла обратно пропорциональна зависящей от температуры концентрации носителей в датчике, а остаточное напряжение обратно пропорционально концентрации носителей в датчике и их подвижности, которая гораздо меньше зависит от температуры, чем концентрация носителей [1]. Поэтому температурная зависимость константы Холла может быть представлена ее зависимостью от остаточного напряжения, которая близка к линейной и может быть аппроксимирована полиномом невысокой степени.
Пусть uX0(uH)=uX(B0, uH) - зависимость холловского напряжения от остаточного напряжения, зарегистрированная при калибровке магнитометра в постоянном магнитном поле с индукцией B0 при изменении температуры датчика. Тогда К(uH)=uX0(uH)/В0 - зависимость крутизны преобразования от остаточного напряжения при фиксированном токе i0 через датчик Холла. При измерении регистрируются холловское и остаточное напряжения, а индукция магнитного поля вычисляется как В=uX(В, uH)/К(uH).
Проверка заявленного способа проводилась с помощью магнитометра, блок-схема которого приведена на чертеже. Датчик Холла 1 содержит первый X1 и второй Х2 холловские контакты, а также первый Т1 и второй Т2 токовые контакты. Ток через датчик Холла 1 создается источником питания 2 (5 В) и устанавливается резистором R1. Напряжения на контактах датчика 1 измеряются микроконтроллером 3 (ADUC834BS), аналоговые входы которого А1, А2, A3 и А4 подключены к контактам Т1, Т2, X1 и Х2 датчика соответственно. Выбор измеряемого напряжения осуществляется программно коммутатором 4, входящим в микроконтроллер 3, направление тока через датчик Холла 1 задается ключами К1-К8, управляемыми программно через буфер 5, входящий в микроконтроллер 3. Опорное напряжение, пропорциональное току i0 через датчик Холла 1, подается на микроконтроллер 3 с резистора R2, что исключает погрешность, связанную с нестабильностью тока i0. Программируемый усилитель 6, входящий в микроконтроллер 3, задает коэффициент усиления, такой чтобы аналого-цифровой преобразователь 7, входящий в микроконтроллер 3, использовал полный динамический диапазон. Оцифрованные преобразователем 7 данные заносятся в память блока управления 8, входящего в микроконтроллер 3, который также осуществляет программное управление процессом измерения, хранит зависимость константы Холла от остаточного напряжения, производит необходимые вычисления и выводит результаты на индикацию. В момент коммутации и до окончания переходных процессов в измерительной цепи и действия коммутационных помех входы микроконтроллера 3 программно блокируются. Измерение на постоянном токе в установившемся режиме исключает как коммутационные, так и фазовые погрешности.
Проведенные исследования показали, что при измерении магнитного поля с индукцией 1 мТл погрешность, обусловленная остаточным напряжением, уменьшается в 1000 раз, а температурная погрешность в диапазоне температур 10...50°С - в 100 раз.
Источники информации
1. Средства измерения параметров магнитного поля / Ю.В.Афанасьев, Н.В.Студенцов, В.Н.Хореев и др. Л.: Энергия, 1979, 320 с.
2. И.Н.Сапранов. Способ термокомпенсации датчика Холла. Авторское свидетельство СССР №467303 по кл. G01R 33/06.
3. С.А.Азимов, М.Н.Мирзаев, К.Д.Потапенко. Устройство для температурной компенсации датчика Холла. Авторское свидетельство СССР №783730 по кл. G01R 33/06.
4. В.К.Игнатьев, А.Г.Протопопов. Магнитометр на основе преобразователя Холла. Приборы и техника эксперимента. 2003, №4, с.116-120 (прототип).
5. Фаин В.М., Ханин Я.И. Квантовая радиофизика. М.: Советское радио, 1965, с.126.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УМЕНЬШЕНИЯ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ДАТЧИКА ХОЛЛА | 2015 |
|
RU2596905C1 |
| Контроллер магнитного поля | 2023 |
|
RU2799103C1 |
| Способ измерения магнитного поля и устройство для его осуществления /его варианты/ | 1980 |
|
SU958991A1 |
| Электронный блок крыльчатого водосчетчика | 2018 |
|
RU2687506C1 |
| Следящий преобразователь тока компенсационного типа | 2017 |
|
RU2664880C1 |
| Датчик холла | 1977 |
|
SU672587A1 |
| Цифровой преобразователь тока компенсационного типа | 2017 |
|
RU2650844C1 |
| Магнитометр | 1977 |
|
SU732772A1 |
| Способ измерения магнитного поля и устройство для его осуществления | 1980 |
|
SU900228A1 |
| Магнитометр | 1980 |
|
SU918908A1 |
Изобретение относится к измерительной технике и может быть использовано для уменьшения систематических погрешностей абсолютных измерений индукции магнитного поля магнитометром с четырехконтактным датчиком Холла. Способ уменьшения погрешностей холловского магнитометра заключается в том, что с помощью микроконтроллера одновременно измеряются холловское напряжение и напряжение небаланса. При градуировке магнитометра в постоянном магнитном поле при различных температурах датчика вычисляется зависимость крутизны преобразования от остаточного напряжения как отношение холловского напряжения к индукции магнитного поля, в котором проводилась калибровка, а при измерении эта зависимость используется для вычисления индукции магнитного поля по измеренным значениям холловского и остаточного напряжений. Технический результат: компенсация температурной погрешности магнитометра. 1 ил.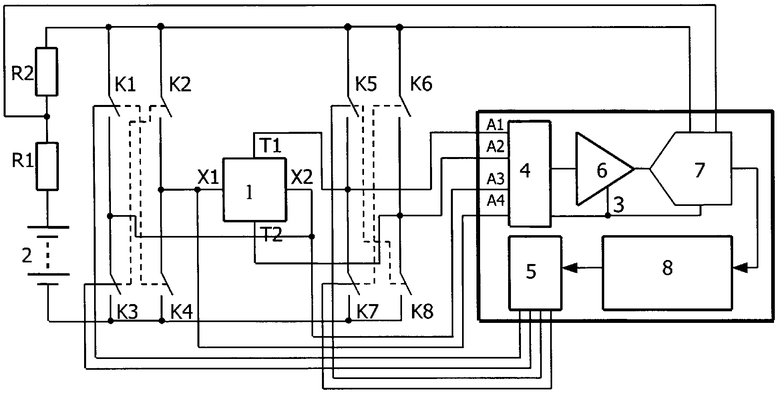
Способ уменьшения погрешностей холловского магнитометра, заключающийся в том, что на датчике Холла измеряются первое напряжение между первым и вторым холловскими контактами при протекании тока между первым и вторым токовыми контактами, второе напряжение между первым и вторым холловскими контактами при протекании тока между вторым и первым токовыми контактами, третье напряжение между первым и вторым токовыми контактами при протекании тока между первым и вторым холловскими контактами и четвертое напряжение между первым и вторым токовыми контактами при протекании тока между вторым и первым холловскими контактами, причем мерой магнитной индукции является холловское напряжение, равное разности суммы первого и четвертого напряжений и суммы второго и третьего напряжений, отличающийся тем, что, с целью компенсации температурной погрешности при калибровке магнитометра, регистрируется зависимость холловского напряжения от остаточного напряжения, равного разности суммы первого и третьего напряжений и суммы второго и четвертого напряжений, и вычисляется зависимость крутизны преобразования от остаточного напряжения как отношение холловского напряжения к индукции магнитного поля, в котором проводилась калибровка, а при измерении эта зависимость используется для вычисления индукции магнитного поля по измеренным значениям холловского и остаточного напряжений.
| ИГНАТЬЕВ В.К., ПРОТОПОПОВ А.Г | |||
| Магнитометр на основе преобразователя Холла | |||
| ПТЭ, 2003, № 4, с.116-120 | |||
| Способ измерения магнитного поля и устройство для его осуществления | 1980 |
|
SU900228A1 |
| Способ измерения напряженности магнитного поля | 1981 |
|
SU983605A1 |
| JP 2002303661 А, 10.18.2002 | |||
| JP 2001337147 А, 07.12.2001 | |||
| ЦИКЛОН | 2005 |
|
RU2306183C2 |

