Настоящее изобретение относится к измерительной технике, в частности к измерителям индукции постоянного магнитного поля на эффекте Холла, и может быть использовано для измерения индукции постоянного магнитного поля, создаваемого магнитными системами на базе постоянных магнитов или электромагнитов, а также в составе систем управления индукцией магнитного поля, в частности, в системах управления магнитным полем электромагнитов в спектрометрах электронного парамагнитного резонанса (ЭПР) и ядерного магнитного резонанса (ЯМР), где основными требованиями являются, стабильность магнитного поля на большом интервале времени и возможность линейно изменять магнитное поле в некотором определённом диапазоне со скоростью достаточной для проведения некоторого цикла измерений, определённых экспериментатором на недолгоживущем образце.
Из уровня техники известен способ создания магнитного поля и система для его реализации, описанный в патенте RU2756776, МПК G01R33/06, 2020 г., по которому изобретение предназначено для создания корректирующего магнитного поля. Технический результат заключается в стабилизации магнитного поля в зазоре электромагнита. Способ стабилизации магнитного поля в зазоре электромагнита, включает задание средствами управления целевого значения магнитной индукции в зазоре электромагнита, подачу тока рассчитанной силы основным источником питания на основные средства создания магнитного поля, измерение величины магнитной индукции в зазоре электромагнита для определения разности между заданным и фактическим значениями величины магнитной индукции, определение добавки к силе тока, подаваемого на основные средства создания магнитного поля, проведение несколько итераций указанной последовательности до достижения экспериментально установленной разности между целевым и фактическим значениями величины магнитной индукции. Последующей подстройкой значения силы тока и введение поправочного коэффициента в значение величины силы тока.
Недостатком способа является то, что в систему стабилизации магнитного поля необходимо добавить корректирующие катушки для получения высокой точности требуемой индукции магнитного поля, стабилизация осуществляется итеративно с использованием двух источников питания, что вносит некоторые сложности при развёртке магнитного поля в широких пределах, в качестве чувствительного датчика используется ЯМР преобразователь, обеспечивающий более высокую точность, но задачей описываемого изобретения является использование датчика Холла.
Известен способ уменьшения погрешностей холловского магнитометра по патенту RU 2311655, МПК G01R33/07, 2006 г., в котором изобретение использовано для уменьшения систематических погрешностей абсолютных измерений индукции магнитного поля магнитометром с четырехконтактным датчиком Холла. Способ уменьшения погрешностей холловского магнитометра заключается в том, что с помощью микроконтроллера одновременно измеряются холловское напряжение и напряжение небаланса. При градуировке магнитометра в постоянном магнитном поле при различных температурах датчика вычисляется зависимость крутизны преобразования от остаточного напряжения как отношение холловского напряжения к индукции магнитного поля, в котором проводилась калибровка, а при измерении эта зависимость используется для вычисления индукции магнитного поля по измеренным значениям холловского и остаточного напряжений. Технический результат: компенсация температурной погрешности магнитометра, однако недостатком является скорость измерения, требуется время для коммутации 4-х вариантов питания датчика Холла с последующим усреднением сигнала. В описываемом изобретении дополнительно требуется управлять источником питания электромагнита с меньшим временем обратной связи, чем обеспечивает данный способ.
Известен способ термостатирования преобразователя Холла, раскрытый в патенте RU 2073877, МПК G01R33/06, 1994 г, в котором описан способ, позволяющий повысить температурную стабильность намерений. Способ термостатирования преобразователя Холла, основанный на размещении преобразователя Холла на подложке вместе со схемой термостатирования. Подложку термостатируют, а на токовый вход преобразователя Холла подают компенсационный ток со схемы термостатирования, зависящий от температуры окружающей среды, и опорный ток.
Недостатком является применимость способа в ограниченном круге решений, а именно для схем с постоянным током питания датчика Холла, но тем не менее может использоваться для статичной термостабилизации.
За прототип выбрано изобретение по патенту RU2782984, МПК G01R33/07, 2022 г. в котором заявлен измеритель индукции постоянного магнитного поля на эффекте Холла и его варианты. Измеритель индукции постоянного магнитного поля на эффекте Холла дополнительно содержит устройство селекции по времени, цифровой накопитель и измеритель температуры датчика Холла, при этом выход АЦП соединен со входом устройства селекции по времени, его управляющий вход соединен с третьим выходом тактирующего устройства, а выход - с одним из входов цифрового перемножителя, второй вход которого соединен с четвертым выходом тактирующего устройства, а выход - со входом цифрового накопителя, к выходу которого подключено микропроцессорное вычислительное устройство, к которому также подключен измеритель температуры датчика Холла, причем источник возбуждающего тока выполнен двуполярным. Технический результат – повышение точности измерений индукции постоянного магнитного поля. Преимущество прототипа перед аналогом объясняется общими преимуществами цифровой обработки сигналов перед аналоговой, а именно, стабильностью работы.
Предлагаемое изобретение отличается от прототипа тем, что датчик Холла питается током не прямоугольной формы, а синусоидальной, что позволяет применять квадратурную обработку сигнала. Как следствие, повышается отношение сигнал/шум, уменьшается время получения результата, что необходимо для дальнейшего управления магнитной системой. Для генерации тока синусоидальной формы узел управления синтезирует цифровую синусоиду, которая посредством ЦАП преобразуется в аналоговую и далее дифференциальным усилителем в ток. Также изобретение включает в себя узел управления магнитной системой через аналоговый выход. От магнитной системы требуется, чтобы источник питания электромагнита имел аналоговое управление.
Задача изобретения заключается в стабилизации магнитного поля на длинных интервалах времени для экспериментов, проходящих от нескольких часов до нескольких суток, с возможностью разворачивания магнитного поля со скоростью около 20 Гс/с в широком динамическом диапазоне. В качестве элемента преобразования индукции магнитного поля в электрический сигнал для этой задачи наиболее подходит датчик Холла, обеспечивающий точность измерения 10-5.
Технический результат достигается благодаря конструктивному решению контроллера магнитного поля, содержащего источник питания электромагнита; средства измерения электромагнитной индукции постоянного магнитного поля на эффекте Холла, включающие термостат с датчиком температуры и датчик Холла; средства вычисления и управления, связанные со средствами измерения электромагнитной индукции и источником питания электромагнита, включающие источник тока для датчика Холла и инструментальный усилитель, аналого-цифровой преобразователь (АЦП), цифро-аналоговый преобразователь (ЦАП), источник опорного напряжения и согласователь уровня управляющего сигнала и микропроцессорное вычислительное устройство, выполненное в виде микроконтроллера, к которому также подключен измеритель температуры датчика Холла и процессорное устройство для взаимодействия с оператором. Согласно изобретению микроконтроллер связан посредством ЦАП и генератора тока с токовыми контактами входа датчика Холла, а выходные контакты датчика Холла соединены через инструментальный усилитель и АЦП с входом микроконтроллера с программно реализованными в нём квадратурной обработкой, цифровой фильтрацией поступающего сигнала, при этом для управления электромагнитиом в микроконтроллер программно интегрирован пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор), который реализует обработку поступившего сигнала ошибки в виде широтно-импульсной модуляции (ШИМ), и соединен выходом управляющего сигнала для стабилизации магнитного поля через фильтр низкой частоты (ФНЧ) и согласователь уровня со входом источника питания электромагнита.
Контроллер магнитного поля, дополнительно характеризующийся тем, что ЦАП и АЦП имеют общий источник опорного напряжения.
На рисунке изображена схема устройства - контроллера магнитного поля на эффекте Холла, которая включает: микроконтроллер 1, цифро-аналоговый преобразователь (ЦАП) 2, генератор тока 3, датчик Холла 4, инструментальный усилитель 5, аналого-цифровой преобразователь (АЦП) 6 , источник опорного напряжения 7, пропорционально-интегрально-дифференциальный регулятор (ПИД) 8, источник питания 9, управляемый напряжением, электромагнит 10, фильтр низкой частоты (ФНЧ) 11, согласователь уровня управляющего сигнала 12, термостат 13, процессорное устройство 14.
Отличие предлагаемого изобретения от известных аналогов заключается в том, что на токовые контакты датчика Холла подаётся ток не в виде меандра (прямоугольная форма), а в синусоидальной форме, в результате чего исчезает генерация дополнительного шума, возникающего за счёт коммутации ключей генератора тока, добавляется возможность квадратурной обработки синусоидального сигнала.
Предлагаемое изобретение использует эффект Холла для преобразования величин и отличается простотой реализации.
С генератора тока на датчик Холла поступает ток в дифференциальном виде, а значит симметрично относительно токовых контактов датчика Холла, за счёт чего идёт большее накопление полезного сигнала, улучшается соотношение сигнал/шум, лучшая фильтрация постоянных смещений.
Важной составляющей изобретения является введение цифро-аналогового преобразователя (ЦАП) для формирования синусоидального тока, питающего датчик Холла. При этом ЦАП и аналого-цифровой преобразователь (АЦП), необходимый для оцифровки напряжения, снимаемого с датчика Холла, имеют один общий источник опорного напряжения, что так же повышает стабильность измерений.
Погрешности, связанные с температурной зависимостью крутизны преобразования и остаточного напряжения датчика Холла, минимизируются за счёт термостатирования датчика Холла и дальнейшей калибровки преобразования для фиксированной температуры. Для исключения постоянных смещений напряжения, снимаемого с датчика, применяется переменный ток, питающий датчик.
Контроллер магнитного роля на эффекте Холла работает следующим образом.
Команда микроконтроллеру 1 для выставления требуемого значения индукции магнитного поля поступает из процессорного устройства 14, в качестве которого может выступать компьютер, ноутбук, гаджет или другое процессорное устройство с возможностью взаимодействия с пользователем. Микроконтроллер 1 синтезирует цифровой синусоидальный сигнал, который с помощью ЦАП 2 преобразуется в аналоговый и далее поступает на генератор тока 3 питающий датчик Холла 4 током синусоидальной формы. С датчика Холла 4 снимается напряжение инструментальным усилителем 5, имеющий коэффициент усиления такой, чтобы весь диапазон управляемого магнитного поля перекрывался динамическим диапазоном АЦП 6 с необходимым запасом. С АЦП 6 данные снимаются микроконтроллером 1 с частотой достаточной для дальнейшей цифровой квадратурной обработки и, путём ресурсо-малозатратных математических операций, включающих сдвиг частоты, децимацию, цифровую фильтрацию квадратурного потока данных, выдаётся огибающая модулированного измеренного сигнала, пропорционального величине измеряемого магнитного поля электромагнита 10. Положительной особенностью является то, что помимо оцифрованного измеряемого сигнала микроконтроллер 1 имеет также цифровые синус и косинус , используемые как для генерации синусоидального тока в ЦАП 2, так и для цифровой квадратурной обработки, в результате чего отсутствуют лишние преобразования, и, как следствие, фазовые шумы, т.к. загрузка данных в ЦАП 2 и снятие данных с АЦП 6 происходят синхронно. Опорное напряжение для ЦАП 2 и АЦП 6 поступает от одного источника опорного напряжения 7.
Далее полученное значение магнитного поля электромагнита 10 поступает на вход пропорционально-интегрально-дифференциального регулятора (ПИД-регулятора) 8, интегрированного в микроконтроллере 1. ПИД-регулятор 8 также является важной составляющей изобретения, он реализован программно в микроконтроллере 1 и предназначен для управления источником питания 9 электромагнита 10. Коэффициенты ПИД-регулятора 8 подбираются к существующей системе (источник питания 9 плюс электромагнит 10), так же как и коэффициенты калибровки датчика Холла 4.
Особенностью ПИД-регулятора 8 является простота реализации выхода. Чтобы обеспечить стабилизацию магнитного поля с точностью 10-5 , достаточно реализовать выход сигнала управления в виде широтно-импульсной модуляции (ШИМ) с достаточно высокой (50-100 кГц) частотой, чтобы ПИД-регулятор 8 мог работать на частоте (0,5-3 кГц) превышающей инерцию магнитной системы в 103 раз (постоянная времени около 1 с). Сигнал ШИМ от ПИД-регулятора 8, проходя через фильтр низкой частоты (ФНЧ) 11 и согласователь уровня управляющего сигнала 12, подаётся на вход источника питания 9 электромагнита 10. Для измерения индукции магнитного поля датчик Холла 4 в составе термостата 13 помещается в зазор электромагнита 10.
Источник питания 9 электромагнита 10 может быть промышленным или самодельным регулируемым устройством с аналоговым управлением по напряжению, перекрывающий необходимый диапазон величин на выходе.
Калибровка изобретения осуществляется при установившейся температуре в термостате 13, применяя внешний измеритель индукции магнитного поля, например на основе ЯМР преобразования.
Термостат 13 осуществляет термостатирование датчика Холла 4, который позволяет упростить калибровку устройства по предлагаемому изобретению и может осуществляться любым доступным способом, как внешним терморегулятором, так и встроенной программной функцией микроконтроллера 1, описываемого изобретения с дополнительным драйвером. Температура термостатирования выбирается заведомо выше температуры окружающей среды и ярма электромагнита, к которому крепится термостат 13 с датчиком Холла 4.
Управление контроллером для стабилизации магнитного поля может осуществляться компьютером, ноутбуком или другим процессорным устройством 14, способным осуществить взаимодействие оператора и устройство по описываемому изобретению. Интерфейс связи любой, поддерживаемый микроконтроллером 1 напрямую или через адаптер.
Пример реализации устройства контроллера магнитного поля на эффекте Холла. Были проведены экспериментальные исследования в МТЦ СО РАН г. Новосибирск на разработанном оборудовании со следующими параметрами.
• Микроконтроллер STM32F103C8T6 с тактовой частотой 72 МГц.
• АЦП 18 бит с частотой выборок 100 квыб/с.
• ЦАП 16 бит с частотой выставления данных синхронно с АЦП, синтезируется сигнал частотой 1 кГц синусоидальной формы.
• Датчик Холла с сопротивлением 500 Ом и рабочим током 2 мА напрямую нагружает операционный усилитель. Низкоомные датчики Холла можно подключать через согласующий трансформатор.
• На вход ПИД-регулятора сигнал огибающей подаётся с частотой 2500 Гц с дополнительным скользящим сглаживанием последних 5 значений.
• ШИМ 10 бит 72кГц на одном из каналов одного из таймеров микроконтроллера с частотой корректировки скважности 2500 Гц.
• Термостат реализован в виде медной подложки, на которой размещаются датчик Холла, транзистор в качестве нагревателя и NTC терморезистор. Напряжение на терморезисторе оцифровывается АЦП, встроенным в микроконтроллер, а нагревом управляет ШИМ 10 бит 72 кГц другого канала того же таймера микроконтроллера. Реализовано ПИД-регулирование температуры.
• Связь с компьютером осуществляется через адаптер USB-UART, где USB на стороне компьютера, а UART на стороне микроконтроллера.
• Питание поступает от USB компьютера, что позволяет использовать устройство как автономный измеритель магнитного поля запитывая его от внешнего аккумулятора 5 вольт (Power Bank).
• Для контроля состояния реализован вывод информации на графический дисплей 128x128 пикселей, где отображаются текущее измеренное магнитное поле и осциллограмма сигнала ошибки (отклонение от требуемой величины)
• Источник питания промышленный 1000 Вт с аналоговым управлением, входное напряжения управления 0-5 вольт, выходное напряжение – 0-60 вольт, что соответствует для имеющегося электромагнита диапазону 0-6000 Гс (0-0,6 Тл).
Технические характеристики устройства:
• Диапазон величин возможных магнитных полей 0-5кГс и 0-15кГс для разных магнитных систем (10кГс = 1Тл).
• разрешение 0,001 Гс.
• погрешность около 0.03 Гс.
• Максимальная скорость развёртки поля 20 Гс/с
• Одна ось, чувствительность к направлению.
• Термостабилизация датчика Холла с точностью 0.1С.
• Питание датчика Холла модулированным током при помощи ЦАП.
• Чтение модулированного напряжения с датчика Холла посредством АЦП.
• По результату измерения контроллер корректирует выходной ток блока питания и соответственно величину магнитного поля.
• Корректировка происходит с частотой 2500 Гц.
• Точность удержания поля: 50мГс в течение минуты и 100мГс в течение часа.
Положительным результатом использования изобретения является следующее:
1. ЦАП и АЦП привязаны к одному источнику опорного напряжения, что снимает требование высокой стабильности опорного напряжения, т. к. в постоянном магнитном поле значения, снимаемые с АЦП, не изменятся относительно значений, выставляемых на ЦАП, при небольшом дрейфе опорного напряжения.
2. Датчик Холла питается током модулированный синусом, который даёт меньше помех в отличии от меандра, используемым в других патентах, улучшается соотношение сигнал/шум. Меньше зависимость от реактивной составляющей проводов в схеме соединений, т.к. всего одна линия в частотном спектре.
3. Синтезируемый синус для питания датчика Холла также используется как опорный сигнал для квадратурного преобразования снимаемого с датчика Холла напряжения при цифровой обработке.
4. Использование ШИМ для управления электромагнитом с гораздо меньшей разрядностью, чем разрядность величины магнитного поля, которую требуется стабилизировать, что обеспечивается благодаря высокой частоте подстройки скважности и большой инертности электромагнита. Отсутствуют требования к стабильности опорного напряжения ШИМ.
5. Температура датчика Холла влияет на его коэффициент преобразования, поэтому для упрощения калибровки, используется термостатирование датчика Холла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров магнитного поля | 2018 |
|
RU2696058C1 |
| ГЕНЕРАТОР ДВОЙНОГО ТОКА С КОМПЕНСАЦИОННОЙ ОБМОТКОЙ | 2009 |
|
RU2396682C1 |
| УСТРОЙСТВО ДЛЯ ПРЯМОГО ПОИСКА ГЕОЛОГИЧЕСКИХ ОБЪЕКТОВ | 2011 |
|
RU2454683C1 |
| Устройство для исследования гальваномагнитных эффектов в полупроводниках | 1987 |
|
SU1496463A1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ПРИБОР КОНТРОЛЯ ФАЗОВОГО СОСТАВА СТАЛИ | 2016 |
|
RU2629920C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ РАСХОДА | 2016 |
|
RU2618505C1 |
| Способ измерения коэрцитивной силы реманенца ферромагнетиков | 1986 |
|
SU1495730A1 |
| Стационарное устройство для воздействия низкочастотным магнитным полем на медико-биологические объекты, система управления и формирования импульсов, индуктор магнитного поля и система механического привода стационарного устройства | 2017 |
|
RU2653628C1 |
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |

Изобретение относится к измерительной технике, в частности к измерителям индукции постоянного магнитного поля на эффекте Холла. Технический результат – стабилизация магнитного поля на длинных интервалах времени, упрощение управления источником питания электромагнита. Технический результат достигается благодаря контроллеру магнитного поля на эффекте Холла, содержащему источник питания электромагнита; средства измерения электромагнитной индукции постоянного магнитного поля на эффекте Холла, включающие термостат с датчиком температуры и датчик Холла; средства вычисления и управления, связанные со средствами измерения электромагнитной индукции и источником питания электромагнита, включающие источник тока для датчика Холла и инструментальный усилитель, аналого-цифровой преобразователь (АЦП), цифроаналоговый преобразователь (ЦАП), источник опорного напряжения и согласователь уровня управляющего сигнала и микропроцессорное вычислительное устройство, выполненное в виде микроконтроллера, к которому также подключен измеритель температуры датчика Холла и процессорное устройство для взаимодействия с оператором. 1 з.п. ф-лы, 1 ил.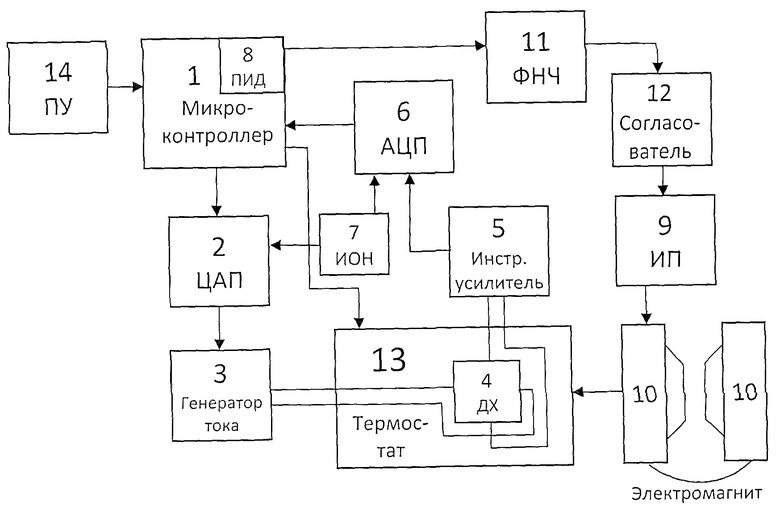
1. Контроллер магнитного поля на эффекте Холла, содержащий источник питания электромагнита; средства измерения электромагнитной индукции постоянного магнитного поля на эффекте Холла, включающие термостат с датчиком температуры и датчик Холла; средства вычисления и управления, связанные со средствами измерения электромагнитной индукции и источником питания электромагнита, включающие источник тока для датчика Холла и инструментальный усилитель, аналого-цифровой преобразователь (АЦП), цифроаналоговый преобразователь (ЦАП), источник опорного напряжения и согласователь уровня управляющего сигнала и микропроцессорное вычислительное устройство, выполненное в виде микроконтроллера, к которому также подключен измеритель температуры датчика Холла и процессорное устройство для взаимодействия с оператором, отличающийся тем, что микроконтроллер синтезирует цифровой синусоидальный сигнал и связан посредством ЦАП и генератора тока с токовыми контактами входа датчика Холла, а выходные контакты датчика Холла соединены через инструментальный усилитель и АЦП с входом микроконтроллера с программно реализованными в нем квадратурной обработкой и цифровой фильтрацией поступающего сигнала, при этом для управления электромагнитом в микроконтроллер программно интегрирован пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор), который реализует обработку поступившего сигнала ошибки в виде широтно-импульсной модуляции (ШИМ) и соединен выходом управляющего сигнала для стабилизации магнитного поля через фильтр низкой частоты (ФНЧ) и согласователь уровня со входом источника питания электромагнита.
2. Контроллер магнитного поля на эффекте Холла по п. 1, отличающийся тем, что ЦАП и АЦП имеют общий источник опорного напряжения.
| Измеритель индукции постоянного магнитного поля на эффекте Холла (варианты) | 2022 |
|
RU2782984C1 |
| Устройство для измерения параметров магнитного поля | 2018 |
|
RU2696058C1 |
| ВИБРАЦИОННЫЙ МАГНИТОМЕТР | 2010 |
|
RU2444743C2 |
| WO 0216956 A1, 28.02.2002. | |||

