Изобретение относится к подъемно-транспортным механизмам, предназначенным для погрузки и разгрузки контейнеров через люки грузовых самолетов.
Известно грузоподъемное устройство для перемещения грузовых контейнеров (SU 1751132 A1, B66B 9/04, 30.07.1992 г.), содержащее вертикальную шахту, тяговый механизм и снабженное установленной на пневмоэлементе грузонесущей платформой, подпружиненными фиксаторами ее положения.
Данным устройством загрузка и выгрузка грузовых контейнеров через люк самолета затруднена, т.к. для перемещения их в люк и из люка необходимо дополнительное погрузо-разгрузочное устройство.
Известно устройство для перемещения грузовых контейнеров (RU 2237005 С2, B66B 9/00, 27.09.2004 г.), содержащее ступенчатую вертикальную шахту, в которой помещены тяговый механизм, трособлочная система, трубчатые вертикальные стойки, в верхней части которых смонтирована грузовая платформа, а к нижней части прикреплена пластина с роликами. Грузовая платформа снабжена механизмом наклона, отклоняющейся площадкой с роликовой дорожкой. Устройство обеспечивает погрузку и разгрузку грузовых контейнеров через люк самолета без привлечения дополнительных погрузочно-разгрузочных устройств.
Однако данное устройство для перемещения грузовых контейнеров представляет собой сложную конструкцию в виде ступенчатой шахты значительных вертикальных размеров, т.к. в ней помещены грузовая платформа, трубчатые стойки, тяговый механизм и трособлочная система.
Технический результат, достигаемый в заявленном изобретении, заключается в уменьшении вертикальных размеров шахты и упрощении конструкции устройства для перемещения грузовых контейнеров.
Указанный технический результат достигается тем, что в устройстве для перемещения грузовых контейнеров, содержащем грузовую платформу, вертикальную шахту, в которой помещены стойки с пластиной, имеющие возможность вертикального перемещения, тяговый механизм, трособлочную систему, шахта выполнена бесступенчатой, снабжена крышкой, а стойки телескопическими, состоящими из внешних и внутренних секций, последние жестко закреплены на пластине, пропущены через отверстия в плите и помещены во внешних секциях, которые проходят через отверстия в крышке, а нижними торцами опираются через подвижные направляющие втулки на плиту, при этом телескопические стойки снабжены механизмами фиксации внутренних секций с внешними секциями, на плите установлены блоки, через которые перекинуты гибкие связи, одни концы которых закреплены в кронштейнах, установленных на внутренней поверхности шахты, а другие закреплены на пластине.
Изобретение поясняется чертежами, где:
- на фигуре 1 представлен общий вид устройства для перемещения грузовых контейнеров;
- на фигуре 2 - сечение А-А фигуры 1;
- на фигуре 3 - узел I фигуры 1;
- на фигуре 4 - устройство для перемещения грузовых контейнеров в промежуточном положении;
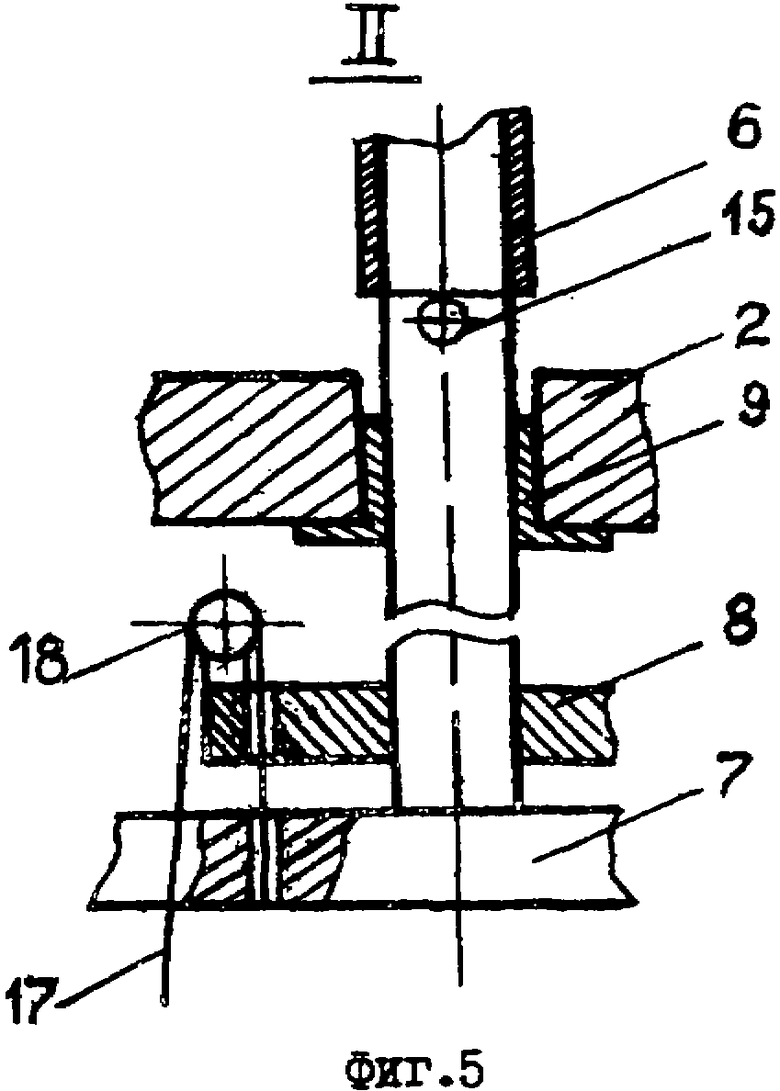
- на фигуре 5 - узел II фигуры 4.
Устройство для перемещения грузовых контейнеров (фиг.1) содержит вертикальную бесступенчатую шахту 1 с крышкой 2. Вне шахты установлен тяговый механизм 3. В шахте 1 помещены телескопические стойки 4, включающие внутренние секции 5 и внешние секции 6. Внутренние секции 5 жестко закреплены на пластине 7, пропущены через отверстия в плите 8 и помещены во внешних секциях 6. На внутренних секциях 5 между плитой 8 и нижними торцами внешних секций 6 установлены подвижные направляющие втулки 9 (фиг.3). Внешние секции 6 находятся в зацеплении с подвижными направляющими втулками 9 и опираются через них на плиту 8. Внешние секции 6, проходя через отверстия в крышке 2, выходят за пределы шахты 1. На верхних торцах внешних секций 6 смонтированы грузовая платформа 10 с отклоняющейся площадкой 11, роликовой дорожкой 12 и механизм наклона 13. На роликовой дорожке 12 отклоняющейся площадки 11 располагаются грузовые контейнеры 14. Телескопические стойки 4 снабжены механизмами фиксации 15 для жесткого скрепления внутренних секций 5 с внешними секциями 6.
На внутренней поверхности бесступенчатой шахты 1 установлены кронштейны 16, в которых одними своими концами закреплены гибкие связи 17. Другие концы гибких связей 17 закреплены на пластине 7. При этом гибкие связи 17 пропущены через отверстия, выполненные в плите 8, и перекинуты через блоки 18, установленные на плите 8. На пластине 7 установлены ролики 19, контактирующие с внутренней поверхностью шахты 1 и обеспечивающие устойчивое вертикальное перемещение пластины 7 в шахте 1.
Подъем плиты 8 и внешних секций 6 с грузовой платформой 10 осуществляется грузовым тросом 20. Грузовой трос 20 одним концом закреплен в скобе 21, смонтированной в центре плиты 8, пропущен через отверстие 22 в крышке 2, блоки 23 и 24, а вторым концом закреплен на тяговом механизме 3.
Устройство для перемещения грузовых контейнеров работает следующим образом. На роликовую дорожку 12 отклоняющейся площадки 11 устанавливаются грузовые контейнеры 14. По команде с пульта управления (не показано) приводится в движение тяговый механизм 3. Грузовой трос 20, закрепленный в скобе 21, поднимает вверх плиту 8. Плита 8 перемещает находящиеся в зацеплении подвижные направляющие втулки 9 с внешними секциями 6, при этом внутренние секции 5 являются для них направляющими. Затем срабатывают механизмы фиксации 15, жестко скрепляя внутренние секции 5 с внешними секциями 6. Пластина 7 находится в исходном положении, оставаясь неподвижной.
При дальнейшем подъеме плиты 8 происходит натяжение, а затем подъем гибких связей 17, перекинутых через блоки 18. Поскольку гибкие связи 17 концами закреплены на пластине 7, последняя, контактируя роликами 19 с внутренней поверхностью бесступенчатой шахты 1, перемещается вверх (фиг.4), поднимая соединенные внутренние секции 5 и внешние секции 6 с подвижными втулками 9. Войдя в крышку 2, подвижные втулки 9 фиксируются и удерживаются в ней. При дальнейшем движении телескопических стоек 4 подвижные втулки 9 выходят из зацепления с нижними торцами внешних секций 6. Находясь в крышке 2, подвижные втулки 9 обеспечивают устойчивое положение телескопических стоек 4 при дальнейшем их перемещении (фиг.5).
Происходит одновременное перемещение вверх плиты 8, пластины 7, телескопических стоек 4 с грузовой платформой 10 и подъем грузовых контейнеров на необходимую высоту. С помощью механизма наклона 13 отклоняющаяся площадка 11 с роликовой дорожкой 12 принимает наклонное положение и устанавливается на уровне пола самолета. Производится перемещение грузовых контейнеров по роликовой дорожке 12 с грузовой платформы 10 в люк самолета.
После погрузки контейнеров в самолет механизм наклона 13 возвращает отклоняющуюся площадку 11 в горизонтальное положение. По команде с пульта управления тяговый механизм 3 приводит в движение грузовой трос 20. Плита 8 и пластина 7 с телескопическими стойками 4 опускаются. В крышке 2 нижние торцы внешних секций 6 входят в зацепление с подвижными направляющими втулками 9 и выталкивают их из крышки 2. Пластина 7 с внутренними секциями 5 занимает исходное положение. Происходит расфиксирование внутренних секций 5 и внешних секций 6. Плита 8 с опирающимися на нее через подвижные направляющие втулки 9 внешними секциями 6 также опускается и занимает свое исходное положение. Затем процесс погрузки грузовых контейнеров повторяется.
Предлагаемое техническое решение позволяет уменьшить вертикальные размеры шахты и значительно снизить металлоемкость устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВЫХ КОНТЕЙНЕРОВ | 2000 |
|
RU2237005C2 |
| ПОДЪЕМНИК | 2004 |
|
RU2305061C2 |
| СПАСАТЕЛЬНАЯ СИСТЕМА С ВНЕШНЕЙ ПОДВЕСКОЙ К ЛЕТАТЕЛЬНОМУ АППАРАТУ | 2014 |
|
RU2563291C1 |
| ТРАНСПОРТАБЕЛЬНЫЙ БОРТОВОЙ ПОДЪЁМНИК | 2015 |
|
RU2602269C2 |
| СИСТЕМА ДЛЯ ЗАГРУЗКИ И ТРАНСПОРТИРОВКИ МЕЛКОДИСПЕРСНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2294889C1 |
| УНИВЕРСАЛЬНЫЙ БОРТОВОЙ ПОДЪЕМНИК ДЛЯ ПАССАЖИРОВ С ОГРАНИЧЕННЫМИ ВОЗМОЖНОСТЯМИ | 2019 |
|
RU2726211C1 |
| СИЛОВОЙ ТРЕНАЖЕР И НАГРУЗОЧНЫЙ УЗЕЛ (ВАРИАНТЫ) | 2003 |
|
RU2344861C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2014 |
|
RU2563076C1 |
| Тележка для перемещения штучных грузов | 1990 |
|
SU1782928A1 |
| ЛИФТ-ГОЛЬДЕР | 2014 |
|
RU2539429C1 |



Изобретение относится к подъемно-транспортным механизмам, предназначенным для погрузки и разгрузки контейнеров через люки грузовых самолетов. Устройство содержит грузовую платформу, вертикальную бесступенчатую шахту, в которой помещены стойки с пластиной, имеющие возможность вертикального перемещения, тяговый механизм, трособлочную систему. Стойки выполнены телескопическими, внутренние секции которых жестко закреплены на пластине, пропущены через отверстия в плите и помещены во внешних секциях. Внешние секции проходят через отверстия в крышке шахты и опираются нижними торцами через подвижные направляющие втулки на плиту. Телескопические стойки снабжены механизмами фиксации внутренних секций с внешними секциями. На плите установлены блоки, через которые перекинуты гибкие связи. Одни концы гибких связей закреплены в кронштейнах, установленных на внутренней поверхности шахты, а другие закреплены на пластине. Изобретение позволяет уменьшить вертикальные размеры шахты и значительно снизить металлоемкость устройства. 5 ил.
Устройство для перемещения грузовых контейнеров, содержащее грузовую платформу, вертикальную шахту, в которой помещены стойки с пластиной, имеющие возможность вертикального перемещения, тяговый механизм, трособлочную систему, отличающееся тем, что шахта выполнена бесступенчатой, снабжена крышкой, а стойки выполнены телескопическими, состоящими из внешних и внутренних секций, последние жестко закреплены на пластине, пропущены через отверстия в плите и помещены во внешних секциях, которые проходят через отверстия в крышке, а нижними торцами опираются через подвижные направляющие втулки на плиту, при этом телескопические стойки снабжены механизмами фиксации внутренних секций с внешними секциями, на плите установлены блоки, через которые перекинуты гибкие связи, при этом одни концы гибких связей закреплены в кронштейнах, установленных на внутренней поверхности шахты, а другие закреплены на пластине.
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВЫХ КОНТЕЙНЕРОВ | 2000 |
|
RU2237005C2 |
| Погрузочно-разгрузочное устройство | 1988 |
|
SU1558864A1 |
| Способ определения времени задержки неинвертирующих элементов | 1985 |
|
SU1262443A1 |

