Изобретение относится к аварийно-спасательному оборудованию, применяемому для транспортировки людей и грузов из зон ЧС летательными аппаратами (вертолетами, дирижаблями), где их посадка невозможна.
Известно устройство внешней подвески груза к вертолету по патенту РФ №2213028, B64D 1/22, B64D 9/00 2003 г., содержащее грузонесущий элемент с кольцевым фиксирующим элементом в центральном люке пола фюзеляжа, которое хотя и может использоваться для подвески спасательных систем, однако, такое устройство не может использоваться для спуска и обратного подъема через люк многоместных спасательных систем, спасаемых людей и самих спасателей из-за перекрытия проема люка самой подвеской.
Известна также спасательная система с внешней подвеской к вертолету по патенту РФ №2224692, B64D 47/00, 2002 г., содержащая внешнюю подвеску под центральным люком фюзеляжа вертолета с замком крепления грузового каната и многоместную корзину для размещения и эвакуации пострадавших из зон ЧС. Однако она не обладает возможностью складывания в режиме «зависания» для бортового расположения при дальних рейсах, особенно в арктических условиях и военных действиях, где требуется мобильность и необходимость оказания на борту срочной медицинской помощи спасаемым.
Для замедления скорости спуска грузов, подвешенных на канате с высотных объектов («в подвеске») применяются спусковые устройства, обеспечивающие торможение за счет трения каната для снижения рисков от динамических нагрузок на него. Информация о спусковых устройствах имеется в открытом доступе, в частности в сети Интернет по адресу: http://www.kongrussia.ru/collection/spuskovye-i-strahovochnye-ustroystva/product/rackong-spuskovoe-ustroystvo (модель Rackong).
Однако эти устройства не обеспечивают своей работоспособности в диапазоне нагрузок на канат, изменяющихся в десятки раз (например, при спуске незагруженной платформы и транспортировке ее в полете с полной нагрузкой до 10 человек), и, кроме того, эффект торможения в них достигается за счет трения определенных элементов о поверхность каната, приводя к его неконтролируемому износу и ненадежности системы в целом.
Наиболее близким решением по технической сущности и достигаемому результату к заявляемому является решение по патенту РФ №2342286, B64D 25/00, 2006 г. Такая система содержит главный элемент - многоместную складную самораскрывающуюся при спуске платформу (гондолу), которая соединена с грузовым канатом внешней подвески.
Платформа содержит центральный несущий шток (мачту), нижний конец которого служит неподвижной шарнирной опорой для нескольких спиц (плеч), поворотных относительно штока таким образом, что верхние концы спиц в транспортном положении их «сложения» вдоль штока удерживаются в верхней его части посредством подвижного относительно штока подпружиненного тарельчатого фиксатора, соединенного с грузовым канатом. При этом нижние концы каждой из спиц в положении раскрытия ложемента фиксируются в шарнире индивидуальным фиксатором, а верхние концы через гибкие растяжки соединяются с верхней частью несущего штока. Для приведения платформы в рабочее положение ее выбрасывают через центральный люк пола фюзеляжа на грузовом канате внешней подвески.
В конечный момент свободного падения платформы грузовой канат натягивается, и соединенный с ним тарельчатый фиксатор спиц прекращает движение вниз, при этом за счет инерционного совместного движения штока и шарнирного узла со спицами их взаимодействие с тарельчатым фиксатором прекращается и спицы, преодолевая действие возвратной пружины фиксатора, поворачиваются в своих шарнирах, приводя ложемент платформы в рабочее (перпендикулярно штоку) положение. Однако конструкция известного устройства функционально предполагает только загрузку ложемента платформы спасателями и пострадавшими в режиме «зависания» вертолета и эвакуацию их на небольшие расстояния в безопасную зону при благоприятных климатических условиях и отсутствии тяжелораненых.
Для решения такой ограниченной задачи платформа оборудована индивидуальными фиксаторами для каждой из пяти спиц ложемента на нижнем конце штока и сторонами тарельчатого фиксатора на верхнем конце штока, что делает практически невозможным быстрое синхронное складывание всех спиц платформы в транспортное положение в «подвеске». Поэтому эвакуация пострадавших на борт для дальнейших перелетов не предполагается.
Реально, тяжелые травмы пострадавших, переохлаждение тонущих, ожоги и отравление угарным газом при пожарах требуют экстренного подъема пострадавших и платформы на борт и скорейшей эвакуации из опасной зоны с оказанием срочной медицинской помощи на борту, особенно в неблагоприятных метео- и географических условиях.
Таким образом, конструкция известной платформы с наличием 5-ти индивидуальных и одного общего фиксаторов спиц не обеспечивает возможность быстрого и синхронного складывания всех спиц платформы в режиме «зависания» в транспортное положение с ее подъемом на борт.
Задачей, на решение которой направлено заявляемое изобретение, является расширение функциональных возможностей, повышение оперативности и надежности эксплуатации систем с платформой на внешней подвеске со снижением рисков для жизни при эвакуации пострадавших.
Техническим результатом от использования изобретения является возможность:
1) подъема пострадавших из платформы на борт вертолета штатными лебедками;
2) быстрого складывания платформы в транспортное положение силами одного спасателя;
3) подъема платформы на борт вертолета;
4) перелета вертолета в безопасную зону на крейсерской скорости с оказанием пострадавшим полноценной медицинской помощи на борту.
Указанный результат достигается при помощи предлагаемой спасательной системы с внешней подвеской к летательному аппарату, содержащей соединенную с грузовым канатом многоместную складную самораскрывающуюся при спуске платформу, в которой:
во-первых, имеется кольцевой фиксатор верхних концов спиц платформы, неподвижно закрепленный на верхнем конце несущего штока вместе с нижним концом грузового каната, а нижние концы спиц шарнирно закреплены на нижнем ползуне, соосно подвижном относительно несущего штока и подпружиненно взаимодействующем с ним в пределах хода расфиксации спиц из кольцевого фиксатора, причем фиксирующее усилие запирающей пружины равно 1,5-кратному весу подвижной части ненагруженной платформы, а каждая спица выполнена в виде двуплечего рычага, нижний конец которого шарнирно соединен с нижним ползуном штока, а шарнир центральной части каждой спицы взаимодействует через стержневые толкатели с верхним ползуном штока, синхронизирующим одновременное складывание (раскладывание) всех спиц при относительном смещении обоих ползунов;
во-вторых, грузовой канат внешней подвески выполнен плоским с наполнителем сечения из нитей арамидного материала с соотношением ширины и толщины равным 8:1;
в-третьих, трос штатной электролебедки через блок напольной траверсы взаимодействует с грузовым канатом внешней подвески посредством разъемного скользящего кольца;
в-четвертых, на внешнем и внутреннем участках фюзеляжа в проемах центрального люка и боковой двери расположен дополнительный кольцевой канат, при продольном движении которого вдоль фюзеляжа с соединителями его концов в режиме «зависания» вертолета обеспечивается взаимодействие грузонесущего элемента троса штатной электролебедки со скользящим сопрягающим кольцом на грузовом канате внешней подвески платформы в центральном люке;
в-пятых; спусковое тормозное устройство платформы выполнено в виде трех цилиндрических втулок с параллельными осями на общей П-образной раме, причем оси крайних втулок неподвижны, а ось средней из них является поворотной в поперечном направлении относительно движения грузового каната, при этом зазоры между центральной и крайними втулками равны 1,5÷2 толщинам грузового каната, а его ширина равна длине втулок;
в-шестых, для бесфрикционного торможения платформы при спуске участок грузового каната, закрепленного между платформой и электрозамком напольной опорной траверсы, намотан на внешнюю квазицилиндрическую поверхность сложенных спиц (с ложементом платформы в транспортном положении) несколькими секциями с чередующимся изменением направления намотки грузового каната в каждой последующей секции посредством перегиба грузового каната на 180° через специальный стержень, располагаемый перпендикулярно спицам и несущему штоку посередине его длины, причем числом секций намотки и количеством витков в каждой из них регулируется средняя вертикальная составляющая скорости спуска платформы;
в-седьмых, напольная опорная траверса выполнена складной, состоящей из четырех прямоугольных рам, из которых две взаимодействуют между собой телескопически, а две другие соединены между собой шарнирно с поперечными параллельными осями таким образом, что в транспортном положении все четыре рамы траверсы располагаются горизонтально, а в рабочем - образуют жесткий объемный трехзвенный каркас с несущей поперечной балкой в вершине вертикальной опорной рамы так, что нижние части ее и поворотной наклонной рамы фиксируются на неподвижном элементе телескопической рамы;
в-восьмых, нижние концы стоек вертикальной опорной рамы траверсы снабжены штырями, фиксирующими при взаимодействии с соответствующими отверстиями подвижную и неподвижную части телескопической рамы траверсы в ее рабочем положении, а горизонтальная панель неподвижной части телескопической рамы и боковые грани наклонной рамы являются опорными для контейнера грузового каната;
в-девятых, подвижные и неподвижные элементы раздвижной телескопической рамы траверсы содержат вертикальные упоры, центрирующие и фиксирующие траверсу в рабочем положении по размерам центрального люка фюзеляжа;
в-десятых, одна из стоек несущей поперечной балки оборудована кронштейном, поворотным вокруг вертикальной оси и расположенным на нем блоком, самоориентирующимся в общей вертикальной плоскости со штатной лебедкой вертолета, ее тросом и вертикальной стойкой несущей поперечной балки траверсы.
Введение в конструкцию системы новых элементов позволяет существенно расширить функциональные возможности спасателей, упростить их работу и повысить надежность технических средств.
Заявленное изобретение пояснено чертежами, на которых:
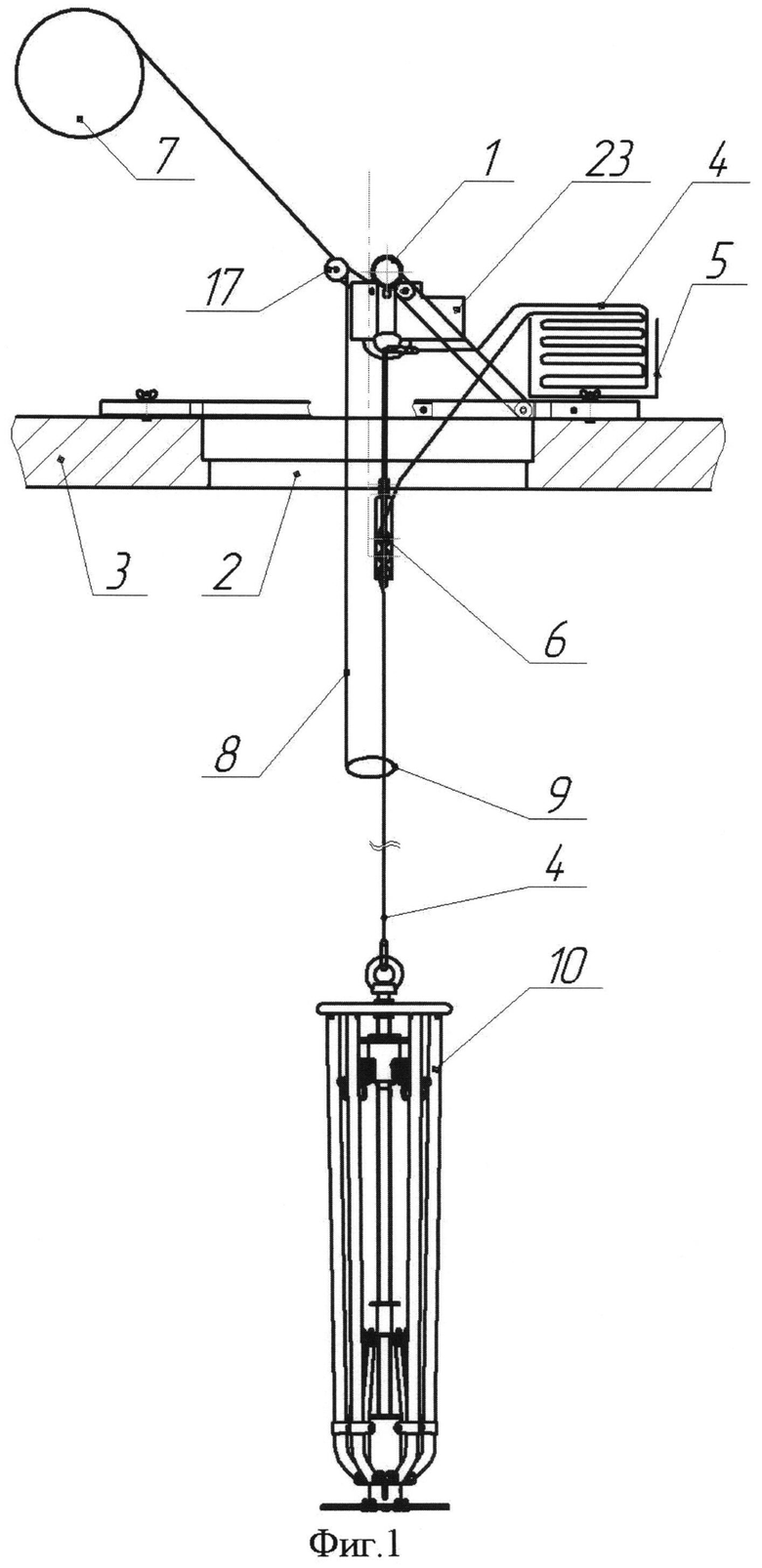
на фиг. 1 показана общая схема соединений элементов системы;
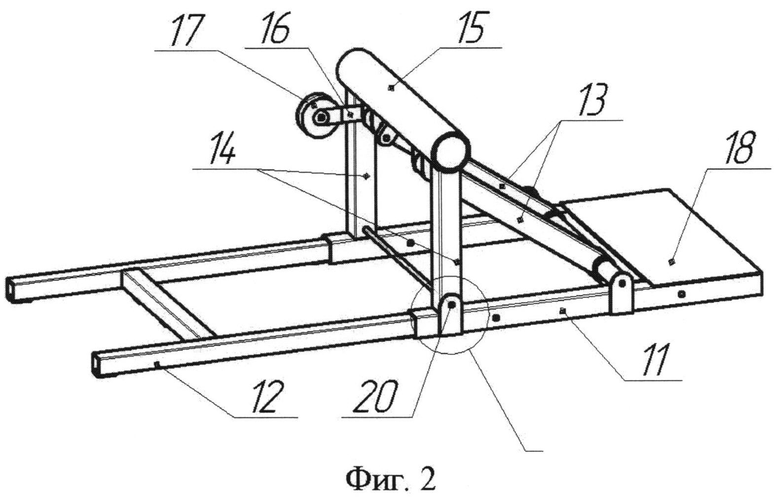
на фиг. 2 показан общий вид напольной опорной траверсы в рабочем положении;
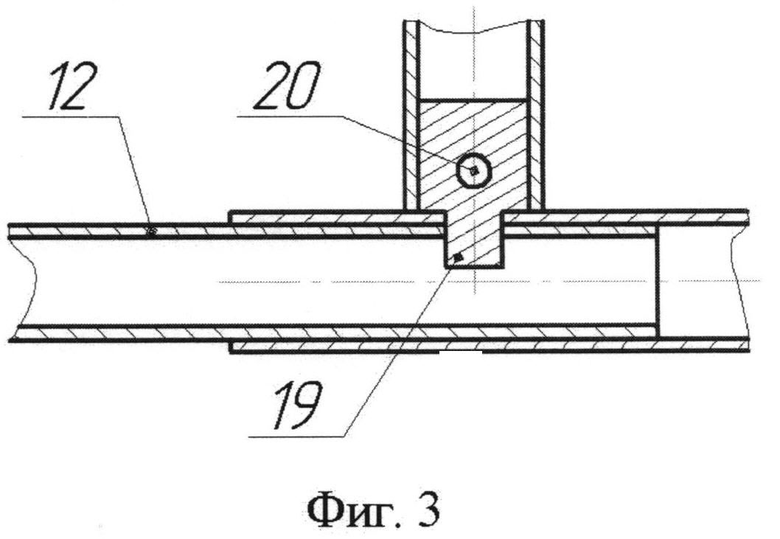
на фиг. 3 показан фиксирующий элемент напольной опорной траверсы;
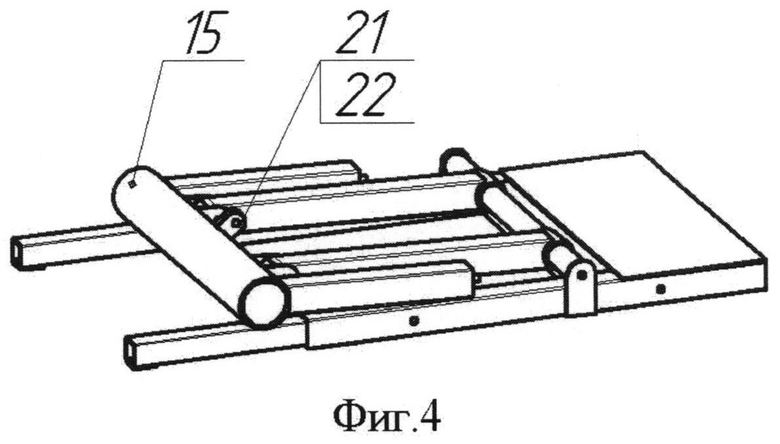
на фиг. 4 показан вид напольной опорной траверсы в сложенном транспортном положении;
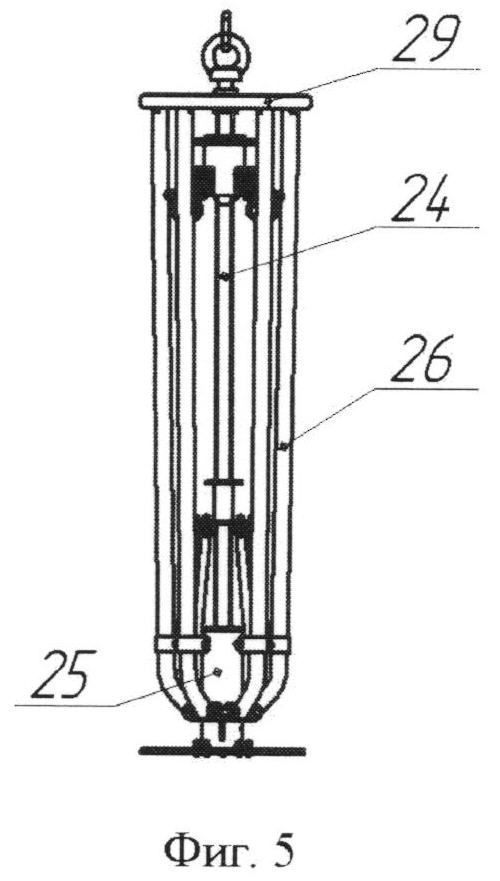
на фиг. 5 показана платформа в сложенном положении без ложемента;
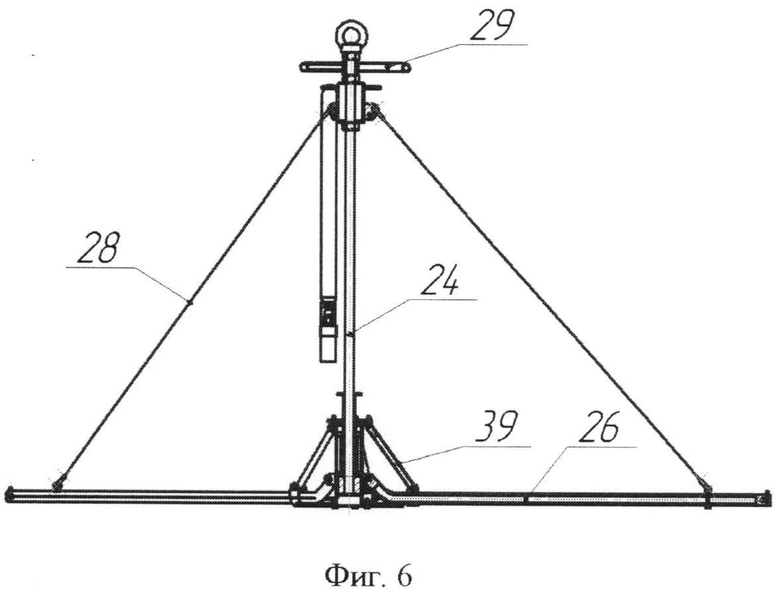
на фиг. 6 показана платформа в разложенном положении без страховочных ремней и ложемента;
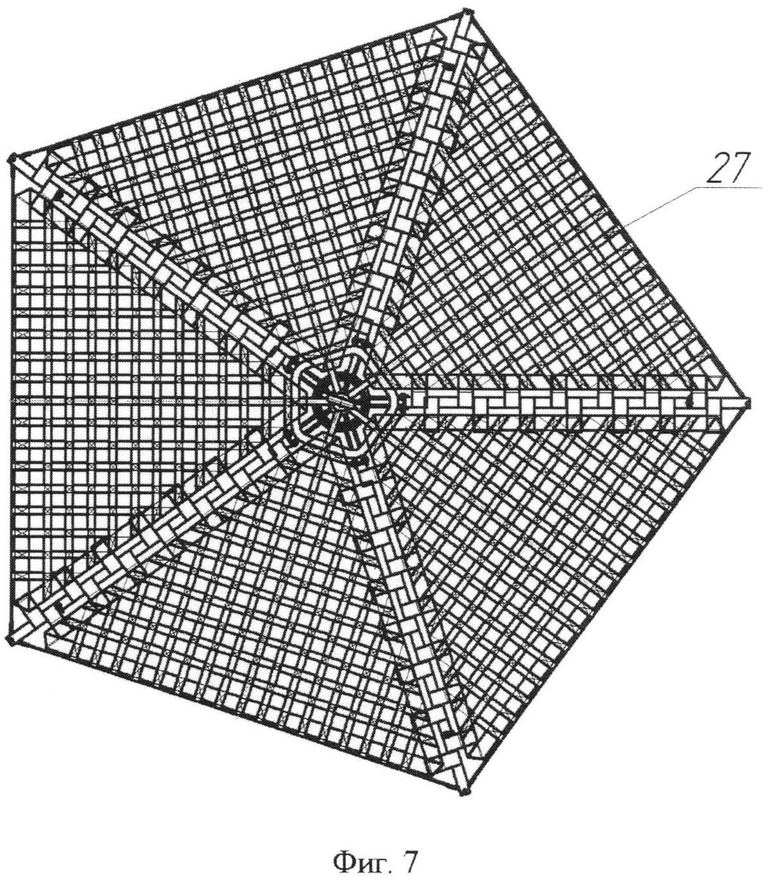
на фиг. 7 показан вид сверху на платформу с ложементом;
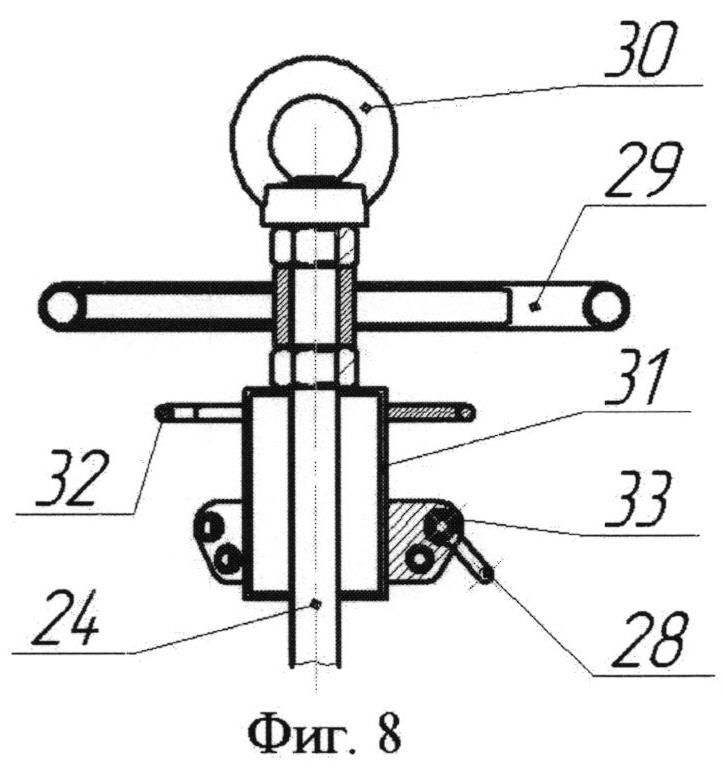
на фиг. 8 показан верхний узел фиксатора спиц на несущем штоке платформы;
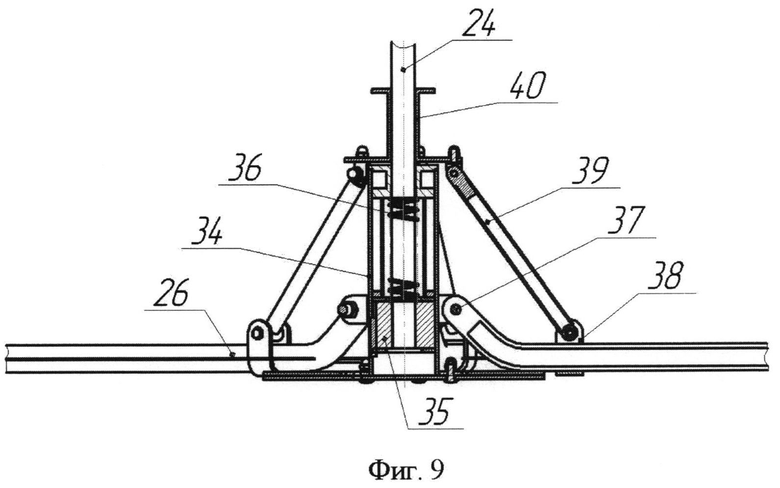
на фиг. 9 показан нижний шарнирный узел спиц с показом верхнего и нижнего ползунов;
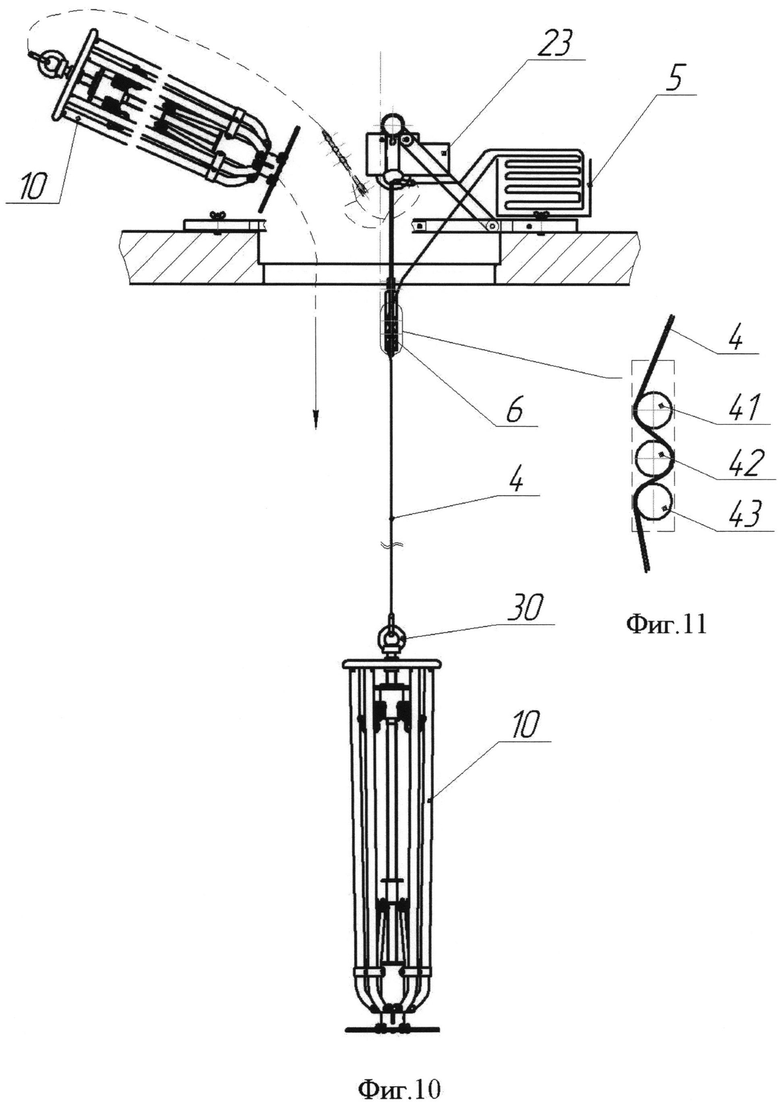
на фиг. 10 показана схема спуска платформы со спусковым тормозным устройством;
на фиг 11 показана схема прохождения грузового каната через элементы тормозного устройства;
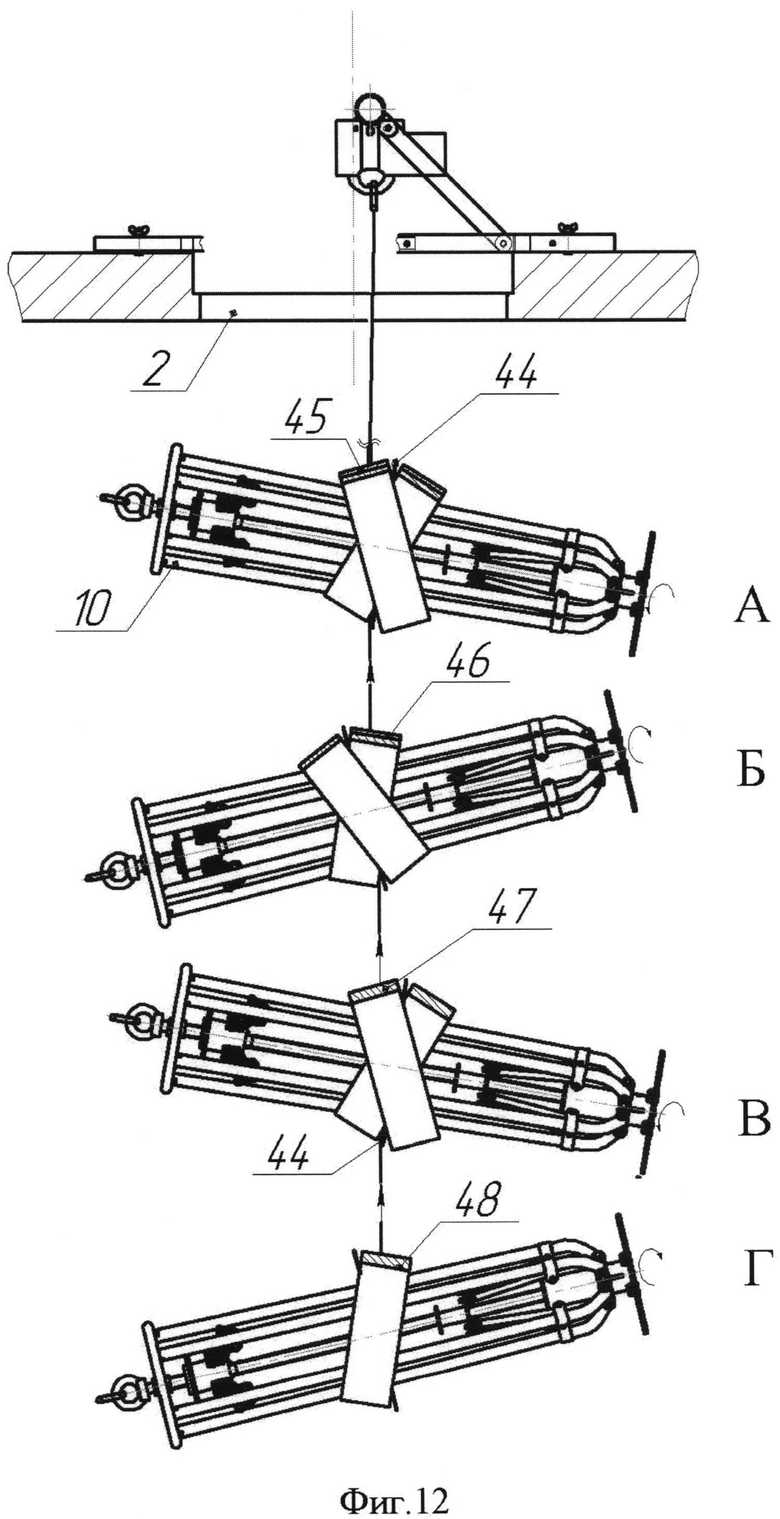
на фиг. 12 показана схема спуска платформы, исключающая спусковое тормозное устройство и контейнер грузового каната (начальные стадии);
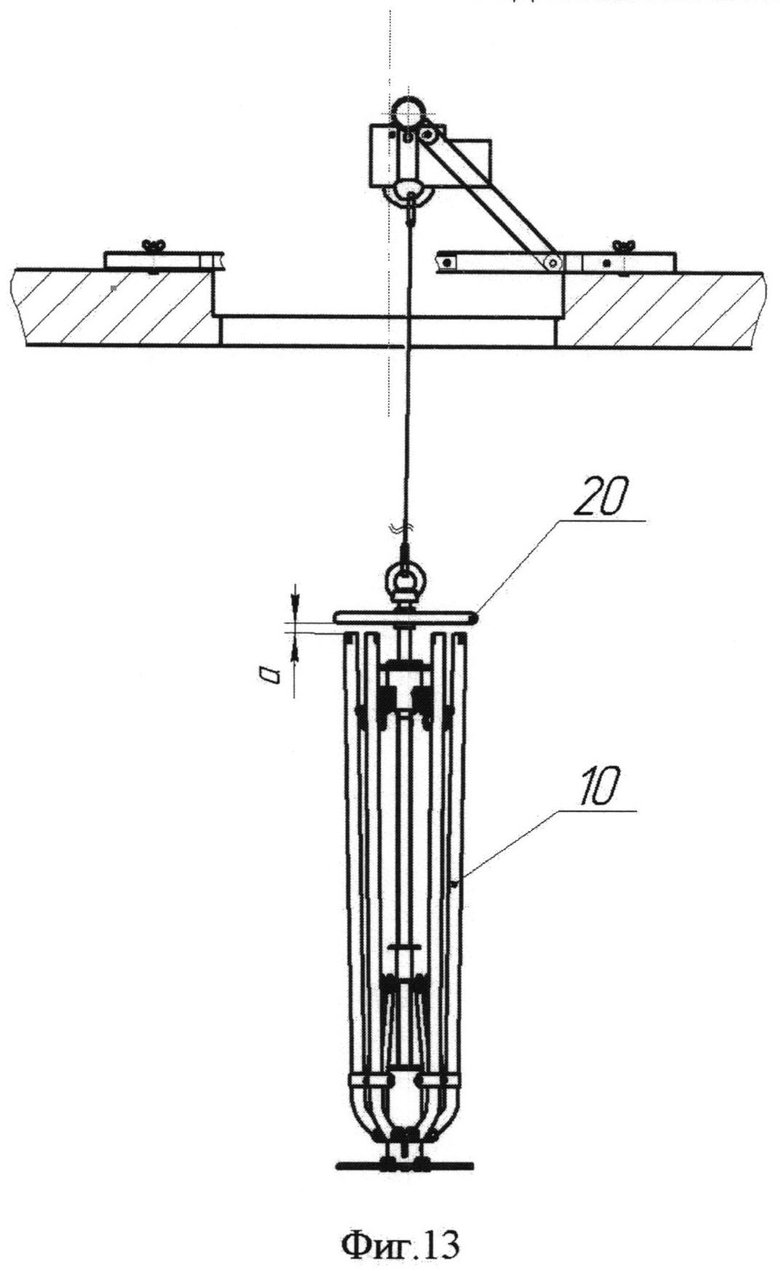
на фиг. 13 показана платформа перед ее раскрытием в нижней точке спуска.
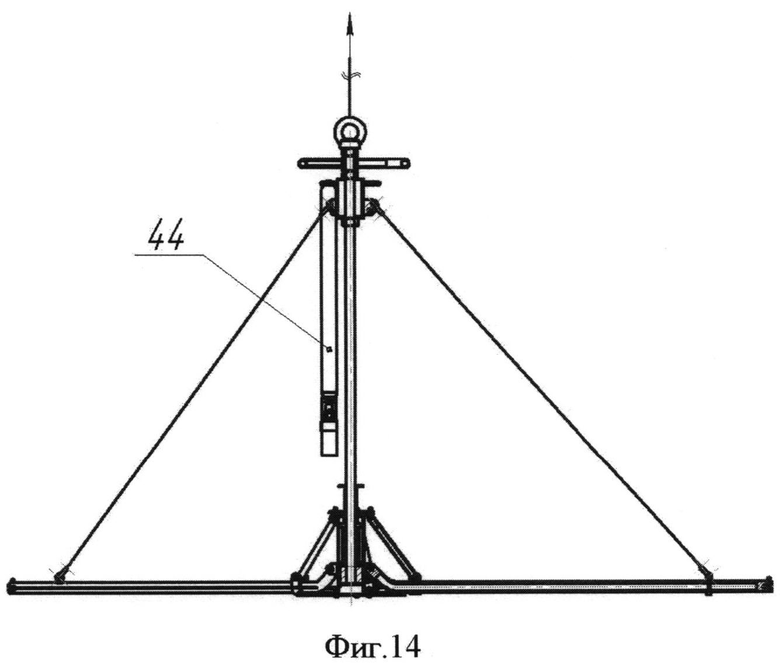
на фиг. 14 показана платформа в раскрытом рабочем положении;
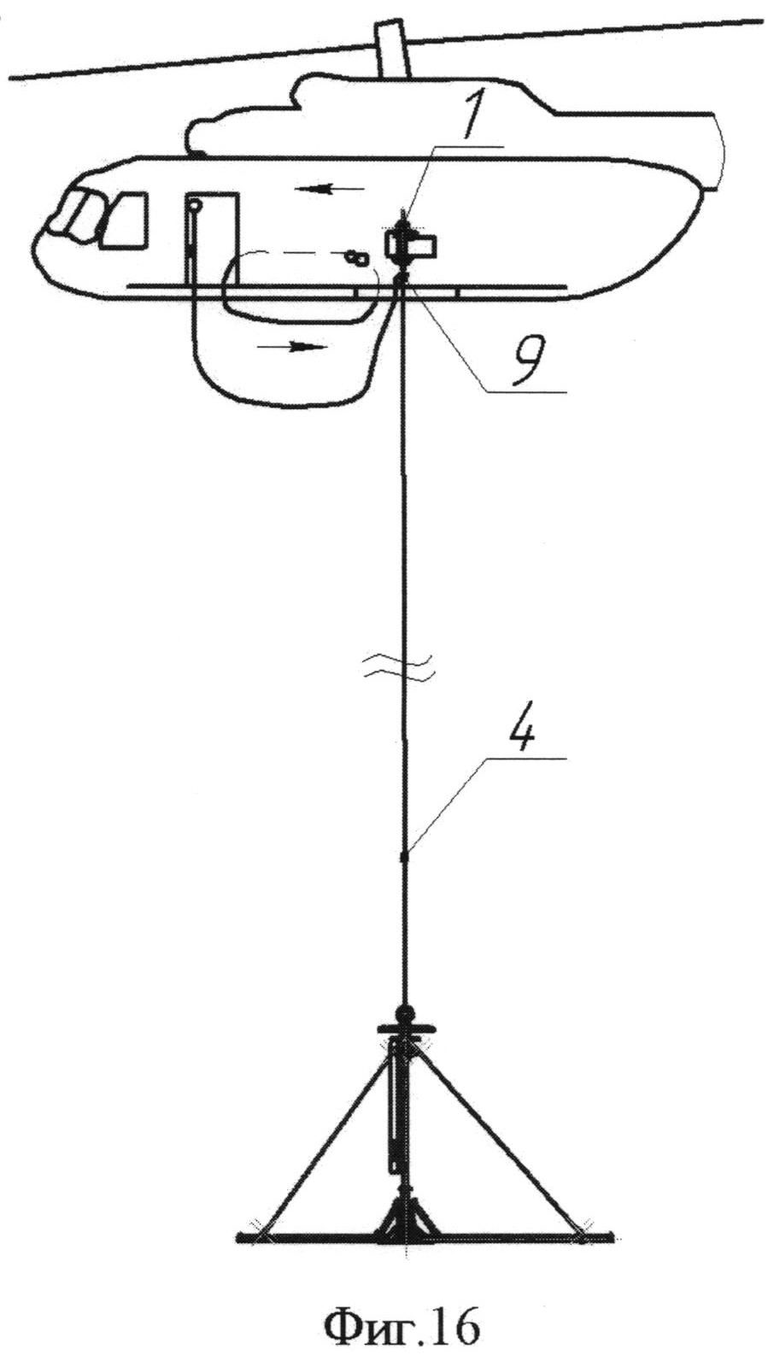
на фиг. 15 и 16 показана схема перемещения и соединения грузоподъемного элемента на конце троса штатной электролебедки со скользящим кольцом грузового каната под фюзеляжем между его проемами боковой двери и центрального люка;
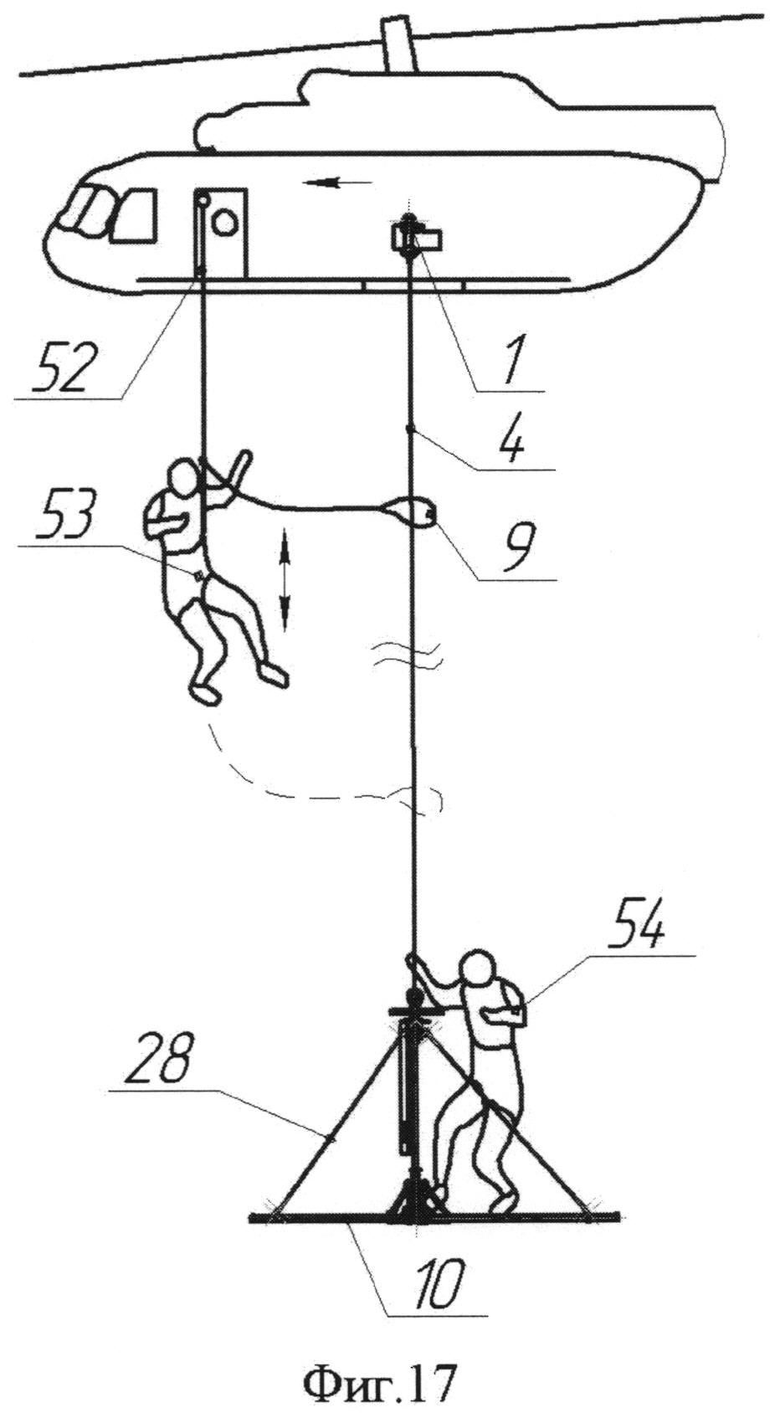
на фиг. 17 показана схема спуска (подъема) спасателя и спасаемого;
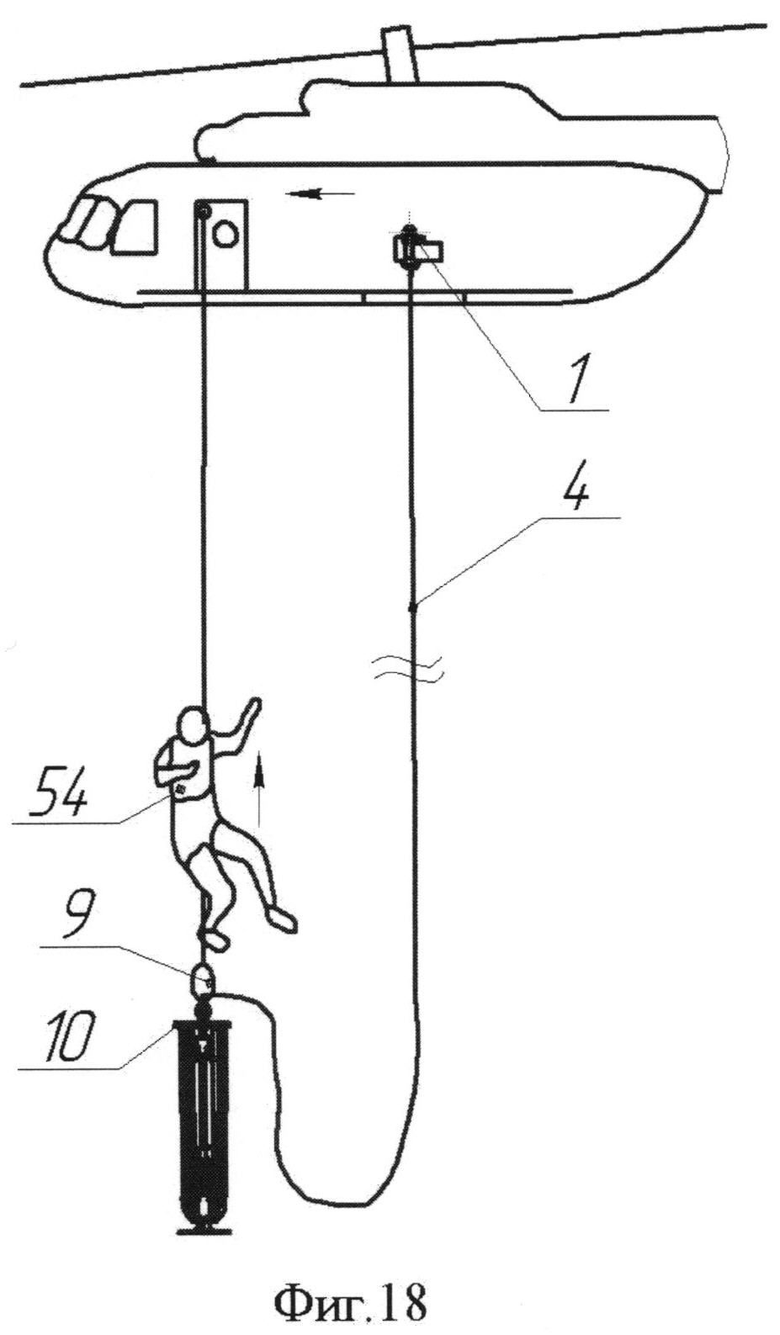
на фиг. 18 показана схема подъема на борт спасателя вместе с платформой в сложенном виде.
Примечание: на фиг. 1, 10, 12 и 13 платформа показана без ложемента.
Предлагаемая спасательная система с внешней подвеской к летательному аппарату содержит напольную опорную траверсу 1 (см. фиг. 1), расположенную над центральным люком 2 пола фюзеляжа 3, грузовой канат 4, расположенный в контейнере 5, спусковое устройство 6, штатную электролебедку 7 с тросом 8, со скользящим по грузовому канату сопрягающим кольцом 9 и раскладную грузонесущую платформу 10.
Напольная опорная траверса выполнена складной, состоящей из двух раздвижных телескопических рам - неподвижной 11 (см. фиг. 2) и подвижной 12, которые имеют в нижней части вертикальные упоры-ограничители (не показаны), фиксирующие и центрирующие траверсу по контуру центрального люка фюзеляжа. На неподвижной части телескопической рамы 11 шарнирно закреплены еще две прямоугольные рамы: наклонная 13 и вертикальная, образованная двумя стойками 14 с несущей поперечной балкой 15, в свою очередь, также шарнирно связанные между собой шарнирами и образующие в рабочем положении жесткий трехзвенный каркас с несущей поперечной балкой 15 в ее вершине.
На одной из вертикальных стоек 14 закреплен поворотный самоориентирующийся кронштейн 16 с опорным блоком 17 для натяжения рабочего троса 8 от вспомогательной штатной лебедки 7 (см. фиг. 1).
На неподвижной части 11 (см. фиг. 2) телескопической рамы имеется плоское основание 18 для фиксации контейнера 5 (см. фиг. 1) с канатом 4, размещаемым между двумя продольными балками наклонной рамы 13 (см. фиг. 2).
Нижняя часть стоек 14 имеет штыри 19 (см. фиг. 3), взаимно фиксирующие телескопические части рамы 11 и 12 в рабочем положении, и отверстия 20 для вертикальной фиксации стоек 14 на неподвижной раме 11. При этом нижний шарнир стоек 14 является быстроразъемным для приведения траверсы в транспортное (плоское) положение (см. фиг. 4), когда подвижная часть рамы 12 (см. фиг. 3) вдвинута в неподвижную 11. На несущей поперечной балке 15 (см. фиг. 4) расположены также серьги 21 и 22 для крепления электрозамка 23 (см. фиг. 1). Вся конструкция раздвижной напольной телескопической рамы 11 и 12 (см. фиг. 3, 4) адаптируется по габаритам различных вертолетов и имеет дополнительные крепления к напольным фиксаторам оборудования в грузовом отсеке фюзеляжа (не показано).
Основная часть спасательной системы - грузонесущая платформа, которая содержит: несущий элемент - шток 24 (см. фиг. 5, 6, 7), нижний шарнирный узел 25 поворотных спиц 26 с закрепленным на них ложементом 27, растяжки 28 спиц, кольцевой фиксатор 29 верхних концов спиц в их фиксированном транспортном положении, параллельном штоку 24.
Более детально верхние и нижние узлы штока 24 платформы 10 представлены на фиг. 8 и 9.
Верхний узел штока (см. фиг. 8) на резьбовом конце штока 24 содержит рым-болт 30, соединяемый с грузовым канатом, кольцевой фиксатор 29 спиц 26, а также коллектор 31, содержащий второе малое кольцо 32 для подвески страховочных ремней для спасаемых (не показаны) и «серьги» 33 для крепления гибких растяжек 28, поддерживающих концы спиц 26 (см. фиг. 9).
Нижний узел платформы (см. фиг. 9) содержит цилиндр нижнего ползуна 34, в котором расположен подвижный поршень 35, жестко связанный со штоком 24 и прижимаемый пружиной 36 вниз вместе с фиксирующим кольцом 29 для спиц 26, сложенных вдоль штока 24 в транспортном положении.
Каждая спица 26 выполнена в виде двуплечего рычага, нижний конец которого 37 шарнирно соединен с цилиндром нижнего ползуна 34 на штоке 24. Центральная часть каждой спицы 26 имеет скобы-шарниры 38, связанные через толкатели 39 с шарнирами верхнего ползуна 40 на штоке 24, синхронизирующем одновременное складывание (раскладывание) всех спиц при относительном смещении верхнего ползуна 40.
Усилие пружины 36, стягивающей через шток 24 верхнее фиксирующее кольцо 29 (см. фиг. 8) с цилиндром нижнего ползуна 34 платформы, должно превышать ее вес в 1,5 раза, что необходимо для надежной фиксации спиц платформы при транспортировке и работе с ней на борту вертолета.
Но, с другой стороны, усилие пружины 36 не должно превышать суммы значений веса платформы и дополнительного динамического усилия, возникающего в момент окончания спуска платформы, которое является функцией ее скорости.
В системе внешней подвески платформа 10 (см. фиг. 10) спускается вниз с грузовым канатом 4, проходящим из контейнера 5 через спусковое устройство 6 и соединяющим через коннекторы рым-болт 30 штока 24 с электрозамком 23. В предлагаемой системе сечение каната 4 принято плоским прямоугольным с соотношением ширины и толщины как 8:1, для обеспечения большей компактности его хранения в контейнере 5 и меньшего сопротивления изгибу в спусковом тормозном устройстве 6 (см. фиг. 1), содержащем на параллельных осях три цилиндрические втулки 41, 42, 43 (см. фиг. 11), из которых одна - центральная 42 подвижна в поперечном направлении относительно движения грузового каната. Конструкция спускового тормозного устройства 6 (см. фиг. 10), оборудованного вращающимися втулками, между которыми протягивается грузовой канат 4 в зазоре, равным 1,5÷2 его толщины, обеспечивает уменьшение поверхностного износа грузового каната и тепловыделение не на его поверхности, а на осях вращающихся втулок 41, 42, 43 (см. фиг. 11) при их вращении.
В данном изобретении предлагается и другой альтернативный вариант заторможенного спуска платформы. Его суть состоит в отказе от специального тормозного устройства 6 для грузового каната и контейнера 5 для его хранения. При этом использование динамического режима возвратно-вращательного движения платформы вокруг своей оси при спуске обеспечивает регулируемое замедление средней скорости падения платформы.
Для этого на внешнюю поверхность сложенных спиц 26 (см. фиг 12) и ложемента 27 (см. фиг. 7) платформы весь грузовой канат 4 наматывается в несколько (например, 4) секций витков во взаимно противоположных направлениях (см. фиг. 12). В каждой последующей секции намотки витков (по 4-5 шт.) посредством перегиба каната на 180° через специальные штыревые упоры 44, перпендикулярные поверхности спиц, направление намотки изменяется на противоположное. На фиг. 14 штыревой упор - в транспортном положении располагается вдоль штока на реп-шнуре.
На схеме спуска платформы (см. фиг. 12) показаны стадии снижения платформы после ее «выброса» через центральный люк фюзеляжа 2.
В стадии «А» разматывается секция витков 45, обеспечивая снижение платформы 10 на 0,25 длины грузового каната с вращением вокруг штока 24 по часовой стрелке (при виде на платформу сверху). В стадии «Б» разматывается следующая секция 46 со снижением платформы еще на 0,25 длины грузового каната, но с вращением в обратную сторону (против часовой стрелки).
В момент изменения направления вращения в силу инерции массы платформы ее поступательное движение вниз импульсно замедляется и также импульсно меняется на противоположное вверх. При этом продольная ось платформы прецессирует, а грузовой канат испытывает небольшие динамические усилия растяжения без внешнего трения о что-либо.
Аналогично происходит динамика в последующих стадиях «В» и «Г» с размоткой секций 47 и 48. При полной размотке и натяжении грузового каната с остановкой платформы верхний ползун 40 со спицами смещается по штоку 24 вниз с образованием зазора «а» (см. фиг. 13) между концами спиц 26 и кольцевым фиксатором 29.
При этом происходит инерциальное раскрытие спиц 26 и ложемента 27 (см. фиг. 7 и 14) в рабочем положении.
Таким образом, техника спуска платформы с ее возвратно-вращательным движением и намоткой на нее каната в противоположных направлениях:
- исключает преждевременное раскрытие платформы;
- уменьшает скорость падения и динамические усилия на грузовой канат;
- упрощает устройства спуска, исключает тормозные устройства, контейнеры для канатоукладки, повышает оперативность служб спасения и эвакуации;
- исключает износ грузового каната за счет исключения его трения в тормозных устройствах;
- позволяет использовать при свободной намотке грузовые канаты разных диаметров, форм сечения и величин прочности;
- увеличивает компактность системы внешней подвески в целом и готовность к использованию в экстремальных условиях.
Работа спасательной системы на внешней подвеске заключается в следующем.
Компоненты собираются в соответствии со схемой (см. фиг. 1) на базе напольной опорной траверсы с несущей поперечной балкой 1, установленной над центральным люком грузового салона вертолета. Платформа 10 закрепляется вертикально около проема люка 2 на подвижной части 12 (см. фиг. 2) телескопической рамы напольной опорной траверсы.
Грузовой канат 4 «змейкой» укладывается в контейнер 5 на плите 18 опорной траверсы. Реп-шнур спускового устройства 6 (совпадает с силовым канатом на фиг. 1) и верхний конец грузового каната закрепляются на электрозамке 23. Нижний конец грузового каната пропускается через валики 41, 42, 43 спускового устройства 6. Спуск платформы в режиме «зависания» осуществляется ее выбросом через проем центрального люка 2. При полной выборке силового каната 4 из контейнера 5 и его натяжении платформа раскрывается (см. фиг. 14).
В зависимости от поставленной перед спасателями задачи производится либо перелет-эвакуация из зоны ЧС в «подвеске», либо подъем пострадавших на борт с помощью штатной лебедки 7 с тросом 8, проходящим через самоориентирующийся блок 17 на вертикальной балке 14 (см. фиг. 2) траверсы.
Для случаев, когда поднимаемый вдоль грузового каната груз (или спасаемый) габаритно не проходит через центральный люк, «система» оборудуется дополнительным кольцевым канатом 49 (см. фиг. 15, 16) с замкнутыми соединителями 50 и 51 на его концах, позволяющим в режиме «зависания» перемещать грузонесущий концевой соединитель со скользящим сопрягающим кольцом 9 от троса штатной лебедки из проема боковой двери 52 к проему центрального люка 20 с внешней стороны фюзеляжа к грузовому канату 4. Это позволяет без использования блока 17 на балке 15 траверсы 1 поднимать спасаемых на борт через боковую дверь 52 (см. фиг. 17 и 18).
На фиг. 17 и 18 последний спасаемый 53 поднимается штатной лебедкой на борт через боковую дверь 52, а спасатель 54 остается на платформе 10. Затем он складывает платформу в транспортное положение нажатием на середину одной из растяжек 28, зацепляет платформу 10 за скользящее кольцо 9 троса лебедки и вместе с платформой поднимается штатной лебедкой через боковую дверь 52 в грузовой отсек, где грузовой канат 4 отсоединяется от платформы 10 и подтягивается на борт через центральный люк 2.
Техническим результатом от использования заявляемого изделия является:
- расширение функций гражданской и военной техники там, где посадка вертолета невозможна (горная, лесная местность, штормовое море, тонущие суда, Арктика и др.);
- обеспечение возможности эвакуации пострадавших на борт для оказания срочной медицинской помощи, что снижает вероятность людских потерь;
- повышение надежности компонентов системы внешней подвески за счет исключения износа каната в тормозных устройствах;
- повышение оперативности работы спасателей за счет адаптивности конструкции к различным вариациям моделей вертолетов.
Изобретение относится к оборудованию летательных аппаратов. Спасательная система с внешней подвеской к летательному аппарату содержит складную самораскрывающуюся при спуске платформу и грузовой канат. Платформа снабжена кольцевым фиксатором верхних концов спиц, неподвижно закрепленных на верхнем конце несущего штока вместе с нижним концом грузового каната. Нижние концы спиц шарнирно закреплены на нижнем ползуне, соосно подвижном относительно несущего штока и подпружиненно взаимодействующем с ним в пределах хода расфиксации спиц из кольцевого фиксатора. Каждая спица выполнена в виде двуплечего рычага, нижний конец которого шарнирно соединен с нижним ползуном штока. Шарнир центральной части каждой спицы взаимодействует через стержневые толкатели с верхним ползуном штока, синхронизирующим одновременное складывание и раскладывание спиц при относительном смещении обоих ползунов. Изобретение направлено на снижение риска для жизни при эвакуации. 9 з.п. ф-лы, 18 ил.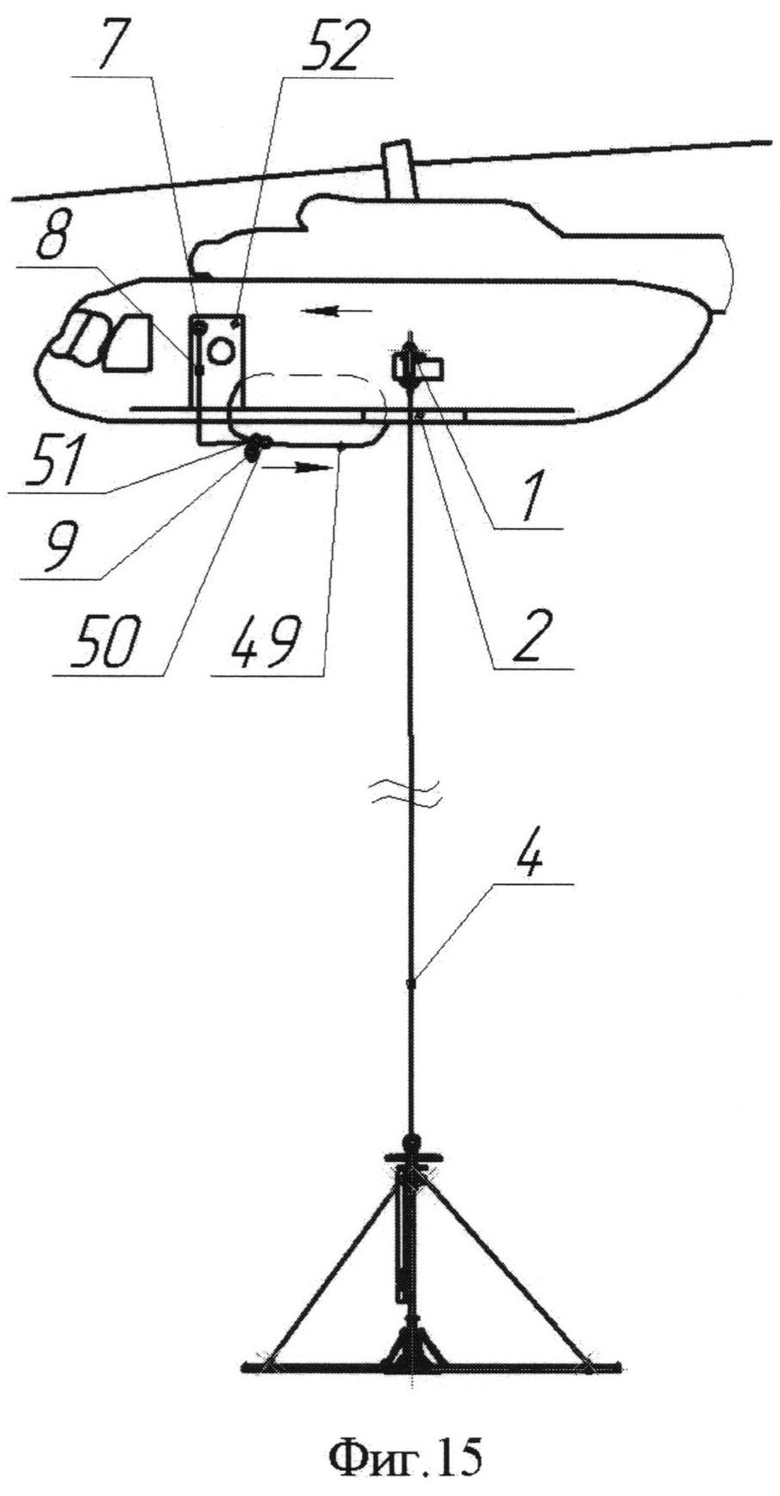
1. Спасательная система с внешней подвеской к летательному аппарату, содержащая соединенную с грузовым канатом многоместную складную самораскрываюшуюся при спуске платформу, отличающаяся тем, что она снабжена кольцевым фиксатором верхних концов спиц платформы неподвижно закрепленным на верхнем конце несущего штока вместе с нижним концом грузового каната, нижние концы спиц шарнирно закреплены на нижнем ползуне, соосно подвижном относительно несущего штока и подпружинено взаимодействующим с ним в пределах хода расфиксации спиц из кольцевого фиксатора, причем фиксирующее усилие запирающей пружины равно 1,5-кратному весу подвижной части ненагруженной платформы, а каждая спица выполнена в виде двуплечего рычага, нижний конец которого шарнирно соединен с нижним ползуном штока, а шарнир центральной части каждой спицы взаимодействует через стержневые толкатели с верхним ползуном штока, синхронизирующим одновременное складывание и раскладывание всех спиц при относительном смещении обоих ползунов.
2. Система по п.1, отличающаяся тем, что грузовой канат внешней подвески выполнен плоским с наполнителем сечения из нитей арамидного материала с соотношением ширины и толщины равным 8:1.
3. Система по п.1, отличающаяся тем, что трос штатной электролебедки через блок напольной траверсы взаимодействует с грузовым канатом внешней подвески посредством разъемного скользящего кольца.
4. Система по п.1, отличающаяся тем, что на внешнем и внутреннем участках фюзеляжа в проемах центрального люка и боковой двери расположен дополнительный кольцевой канат, при продольном движении которого вдоль фюзеляжа с соединителями его концов в режиме «зависания» вертолета обеспечивается взаимодействие грузонесущего элемента троса штатной электролебедки со скользящим сопрягающим кольцом на грузовом канате внешней подвески платформы в центральном люке.
5. Система по п.1, отличающаяся тем, что спусковое тормозное устройство платформы выполнено в виде трех цилиндрических втулок с параллельными осями на общей П-образной раме, причем оси крайних втулок неподвижны, а ось средней из них является поворотной в поперечном направлении относительно движения грузового каната, при этом зазоры между центральной и крайними втулками равны 1,5÷2 толщинам грузового каната, а его ширина равна длине втулок.
6. Система по п.1, отличающаяся тем, что для бесфрикционного торможения платформы при спуске участок грузового каната, закрепленного между платформой и электрозамком напольной опорной траверсы, намотан на внешнюю квазицилиндрическую поверхность сложенных спиц с ложементом платформы в транспортном положении несколькими секциями с чередующимся изменением направления намотки грузового каната в каждой последующей секции посредством перегиба грузового каната на 180° через специальный стержень, располагаемый перпендикулярно спицам и несущему штоку посередине его длины, причем числом секций намотки и количеством витков в каждой из них регулируется средняя вертикальная составляющая скорости спуска платформы.
7. Система по п.1, отличающаяся тем, что напольная опорная траверса выполнена складной, состоящей из четырех прямоугольных рам, из которых две взаимодействуют между собой телескопически, а две другие соединены между собой шарнирно с поперечными параллельными осями таким образом, что в транспортном положении все четыре рамы траверсы располагаются горизонтально, а в рабочем - образуют жесткий объемный трехзвенный каркас с несущей поперечной балкой в вершине вертикальной опорной рамы так, что нижние части ее и поворотной наклонной рамы фиксируются на неподвижном элементе телескопической рамы.
8. Система по п.1, отличающаяся тем, что нижние концы стоек вертикальной опорной рамы траверсы снабжены штырями, фиксирующими при взаимодействии с соответствующими отверстиями подвижную и неподвижную части телескопической рамы траверсы в ее рабочем положении, а горизонтальная панель неподвижной части телескопической рамы и боковые грани наклонной рамы являются опорными для контейнера грузового каната.
9. Система по п.1, отличающаяся тем, что подвижные и неподвижные элементы раздвижной телескопической рамы траверсы содержат вертикальные упоры, центрирующие и фиксирующие траверсу в рабочем положении по размерам центрального люка фюзеляжа.
10. Система по п.1, отличающаяся тем, что одна из стоек несущей поперечной балки оборудована кронштейном, поворотным вокруг вертикальной оси и расположенным на нем блоком, самоориентирующимся в общей вертикальной плоскости со штатной лебедкой вертолета, ее тросом и вертикальной стойкой несущей поперечной балки траверсы.
| ГОНДОЛА С ЗАПИРАЕМЫМИ, РАЗВЕРТЫВАЕМЫМИ ПЛЕЧАМИ | 2004 |
|
RU2342286C2 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| US 4138077 A1, 06.02.1979 | |||
| СПАСАТЕЛЬНОЕ УСТРОЙСТВО НА ВНЕШНЕЙ ПОДВЕСКЕ ВЕРТОЛЕТА | 2002 |
|
RU2224692C2 |

