Предлагаемое изобретение относится к области информационно-измерительной техники летательных аппаратов и может быть использовано в приборных комплексах для измерения истинной воздушной скорости, углов атаки и скольжения на высотах, соответствующих потолку перспективных самолетов и на траектории движения в атмосфере космических летательных аппаратов многоразового действия.
Известен аэрометрический способ измерения истинной воздушной скорости, углов атаки и скольжения, основанный на измерении давлений скоростного напора в приемных отверстиях многодырочного приемника воздушных давлений, по величинам которых судят об искомых параметрах [1, с.73]. Недостатком такого способа является снижение точности измерения при маневренных полетах на больших высотах.
Известен также способ «меток», вносимых в воздушную среду, например, с помощью лазерной искры, образующей электрический пробой, основанный на измерении времени прохождения меткой известного расстояния [1, c.113]. Такой способ не обладает необходимой точностью измерения.
Наиболее близким по технической сущности к предлагаемому является лазерный доплеровский способ измерения истинной воздушной скорости, углов атаки и скольжения, основанный на измерении двойного доплеровского сдвига частот света, отраженного молями воздушного потока (пылевидными и каплевидными частицами), освещенными лазером [2]. Его недостаток - потеря работоспособности на больших высотах, где отсутствуют моли, а также при неблагоприятных погодных условиях. В зависимости от конкретных атмосферных условий рабочий диапазон высот прототипа лежит от 0 до 3-х км и лишь в некоторых случаях до 10 км.
Целью изобретения является повышение точности измерения истинной воздушной скорости, углов атаки и скольжения в условиях высокоскоростных маневренных полетов на больших высотах.
При этом достигаемый технический результат заключается в том, что на борту летательного аппарата принимают излучение искусственно возбуждаемых молекул воздушной среды, что делает возможным измерение воздушно-скоростных параметров на больших высотах в условиях отсутствия молей.
Указанный технический результат достигается за счет определения воздушно - скоростных параметров полета летательных аппаратов путем измерения доплеровских сдвигов частот излучения воздушной среды, благодаря тому, что возбуждают лазером в допробойном режиме спонтанное излучение молекул воздушной среды в двух точках впереди летательного аппарата в его плоскости симметрии, принимают на борту летательного аппарата излучение каждой точки, выделяя в нем одну спектральную составляющую в виде двух разнонаправленных взаимно когерентных лучей, лежащих в той же плоскости симметрии, смешивая их, измеряют разности их частот с неодинаковыми доплеровскими сдвигами, то же самое делают, возбуждая спонтанное излучение в двух точках в перпендикулярной плоскости, проходящей через продольную ось летательного аппарата, и по результатам измерений четырех разностей частот определяют значения истинной воздушной скорости, углов атаки и скольжения.
Для определения воздушно-скоростных параметров в заявленном способе используется собственное спонтанное излучение молекул воздушной среды, возбуждаемое лазером и принимаемое на борту летательного аппарата, в то время как в известном способе используется излучение лазера, отражаемое молями воздуха. Кроме того, в заявленном способе воздушно-скоростные параметры определяются на основании измерений разностей доплеровских сдвигов частот, полученных по разным направлениям, в то время как в известном способе они определяются по измерениям доплеровских сдвигов частот.
Суть заявленного способа поясняется графическими изображениями, где:
- на фигуре 1 показано расположение лазерных ключей в плоскости X, Z симметрии летательного аппарата и в плоскости X, У, проходящей через его продольную ось перпендикулярно плоскости симметрии;
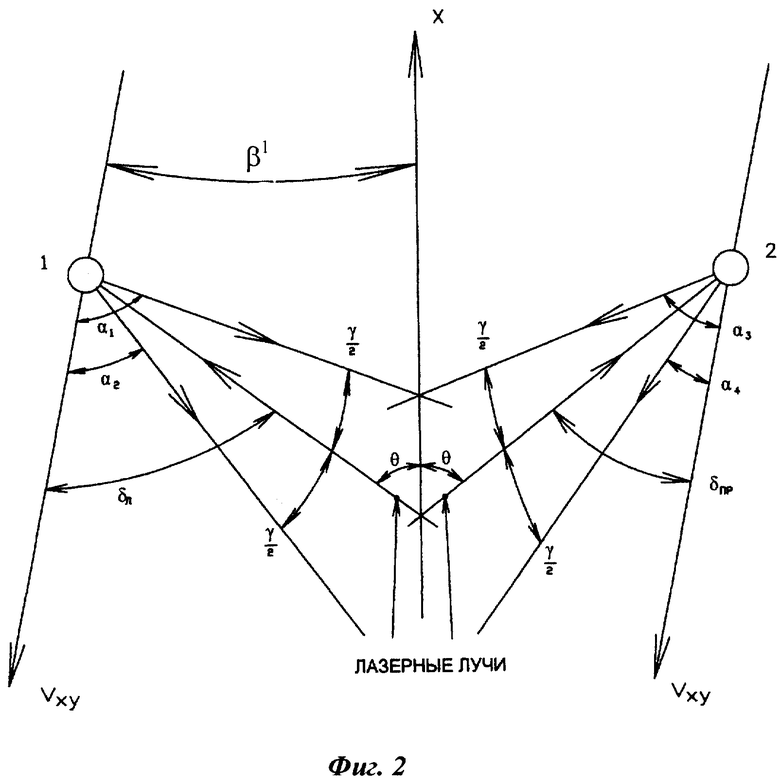
- на фигуре 2 показаны направления лучей двух лазеров и возбуждаемого ими спонтанного излучения молекул воздуха в плоскости X, У;
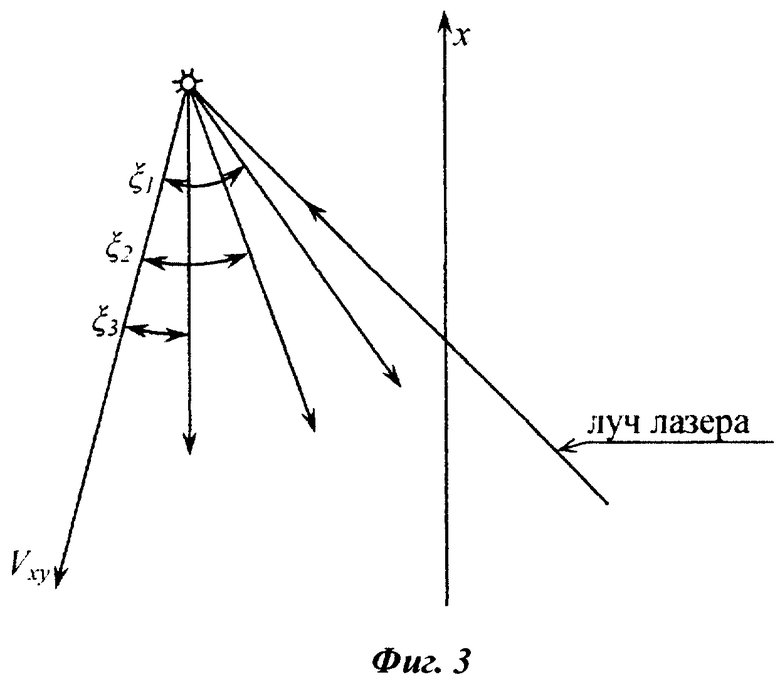
- на фигуре 3 представлены направления лучей в упрощенном варианте реализации способа.
Устройство для реализации способа иллюстрируется схемами, где:
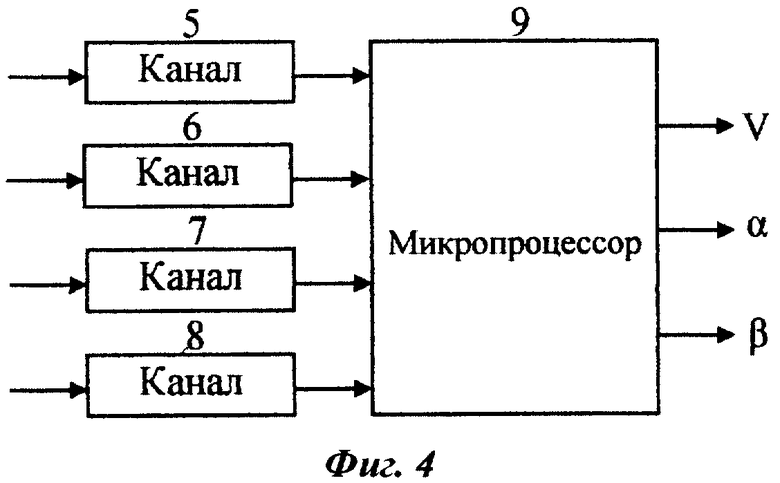
- на фигуре 4 изображена блок-схема всего устройства;
- на фигуре 5 показана блок-схема одного из каналов устройства;
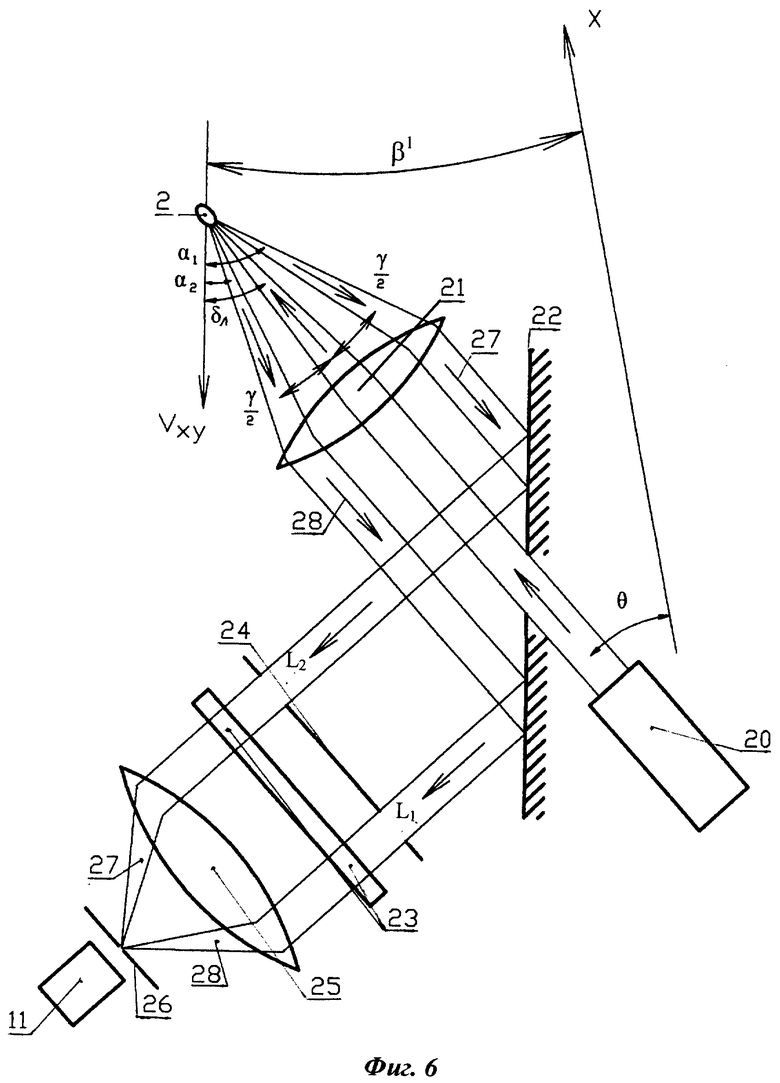
- на фигуре 6 представлена оптическая схема одного из каналов устройства.
В каждом оптическом канале лазер, выполненный, например, на CO2, генерирует луч со световым диаметром 10-15 мм, который фокусируется впереди летательного аппарата за пределами звукового барьера, возбуждает молекулы воздуха в элементарном объеме, окружающем фокус, и переводит их на энергетический уровень, соответствующий частоте излучения лазера. Луч лазера, который лежит в плоскости X, У летательного аппарата (фиг.1) и фокусируется в точке 1, образует первый оптический канал. При этом мощность лазера должна быть такой величины, чтобы вызывать значительное возбуждение молекул воздуха, но не превышать величину, вызывающую электрический пробой.
Аналогичное явление происходит во втором оптическом канале, лучи которого лежат в плоскости X, У, а лазер фокусируется в точке 2 (фиг.1 и 2), а также в третьем и четвертом каналах, оси которых лежат в плоскости X, Z, а лазерные лучи фокусируются в точках 3 и 4 (фиг.1).
Существо заявленного способа измерения поясняется физико-математическими обоснованиями, в которых используются следующие обозначения:
α - угол атаки;
β - угол скольжения;
V - вектор истинной воздушной скорости;
VХУ - проекция вектора истинной воздушной скорости V на плоскость х, у самолета (фиг.1, 2, 6);
VXZ - проекция вектора истинной воздушной скорости V на плоскость х, z самолета;
α1, α2 - углы в плоскости х, у между VXY и осями выделенных оптикой первого канала лучей L1 и L2 с помощью отверстий в экране (фиг.6);
α3, α4 - углы в плоскости х, у во втором оптическом канале, аналогичные углам α1, α2;
θ - угол между продольной осью самолета и осями лазерных лучей, проходящих через точки 1, 2, 3, 4 в плоскостях х, у и х, z (фиг.1);
γ/2 - угол между осью лазерного луча и осями выделенных оптикой лучей L1 и L2, одинаковый для всех четырех оптических каналов системы (фиг.6);
δЛ, δПР - углы в плоскости х, у между VХУ и осями левого лазерного луча, проходящего через точку 1, и правого лазерного луча, проходящего через точку 2 (фиг.1, 2);
δВ, δН - углы в плоскости х, z между VXZ и осями верхнего лазерного луча, проходящего через точку 3, и нижнего лазерного луча, проходящего через точку 4 (фиг.1);
β1 - угол между вектором VХУ и осью х самолета.
Под действием излучения лазера часть возбужденных частиц воздуха вынужденно переходит в первоначальное устойчивое состояние, что сопровождается «вынужденным» излучением в направлении лазерного луча. Другая часть возбужденных частиц самостоятельно переходит в первоначальное состояние, что сопровождается «спонтанным» излучением той же частоты, что и лазерное. Последнее является ненаправленным излучением [3]. Линия спектра спонтанного излучения этой частоты с помощью оптики выделяется в виде двух взаимно когерентных лучей, лежащих в плоскости х, у и расположенных симметрично оси лазера под углами α1 и α2 к проекции VХУ вектора истинной воздушной скорости V летательного аппарата на плоскость х, у (фиг.2). Оба луча поступают на фотодетектор с одинарными доплеровскими сдвигами частот, средние значения которых определяются соответственно как
 и
и 
где f - частота излучения, с - скорость света, fg1, fg2 - средние доплеровские сдвиги частот по лучам L1, L2.
Два световых потока с разными доплеровскими сдвигами образуют на поверхности фотодетектора световое воздействие с частотой биений

Частота биений fбл несет информацию о величине

Эта величина есть проекция истинной воздушной скорости на направление луча лазера.
Аналогично второй оптический канал, лучи которого лежат в плоскости x, у, а лазер фокусируется в точке 2 (фиг.1, 2), несет информацию о величине VХУ sin δПР=VХУ sin (θ-β1).
Значения VХУ и β1 определяются системой уравнений:
где fбпр - доплеровский сдвиг частот во втором канале.
Третий и четвертый каналы, оптические оси которых лежат в плоскости x, z (фиг.1), а лазерные лучи фокусируются в точках 3, 4, определяют VXZ - проекцию вектора V на плоскость x, z и угол атаки α. Для этого решается система уравнений
где fбв и fбн - частоты доплеровских сигналов третьего и четвертого каналов.
Истинная воздушная скорость V определяется по формулам


Угол скольжения β определяется из уравнения

Избыточность информации используется для повышения точности.
В более простом варианте значения V, α и β могут быть получены с помощью двух оптических каналов с осями, лежащими соответственно в плоскостях x, у и x, z. В этом случае в каждом канале спонтанное излучение выделяется в виде трех лучей под углами ξ1, ξ2, ξ3, как показано на фигуре 3 для плоскости x, у, которые попарно фокусируются на поверхностях двух или трех (для получения избыточности) фотодетекторов. Канал, работающий в плоскости x, у, несет информацию о VХУ и β1, а канал, работающий в плоскости х, z, несет информацию о VXZ и α. Величины V и β определяются, как и ранее.
Устройство, реализующее заявленный способ измерения воздушно-скоростных параметров полета, содержит четыре идентичных канала 5, 6, 7, 8 и микропроцессор 9 (фиг.4). Каждый канал содержит оптическую схему 10 (фиг.5), фотодетектор 11, полосовой фильтр 12, смеситель 13, фильтр несущей частоты 14, частотный дискриминатор 15, фильтр нижних частот 16, генератор управляющего напряжения 17, операционный усилитель 18, выходной фильтр звуковой частоты 19. Блоки 17 и 18 образуют обратную связь. Оптическая схема каждого канала включает лазер 20 (фиг.6), линзу 21, зеркало 22, светофильтр 23, экран 24, вторую линзу 25, второй экран 26 и фотодетектор 11.
Устройство работает следующим образом. Четыре лазера на CO2, установленные в носовой части летательного аппарата, дают непрерывное монохроматическое когерентное излучение длиной волны λ=10,6 мкм, фокусируемое за пределами звукового барьера вблизи его границы. Два лазера, оптические оси которых лежат в плоскости, параллельной плоскости x, у летательного аппарата (фиг.1), работают в каналах 5, 6 (фиг.4), предназначенных для определения проекции истинной воздушной скорости V на плоскость x, у и угла β1. Два других с оптическими осями в плоскости x, z работают в каналах 7, 8, измеряющих проекции истинной воздушной скорости V на плоскость x, z и угол атаки α.
Лазер 20 (фиг.6), работающий в канале 5, возбуждает спонтанное излучение молекул воздуха, которое проходят через линзу 21 диаметром 5 см, зеркало 22, светофильтр 23, два круглых симметричных отверстия экрана 24, линзу 25, отверстие экрана 26 и попадает в виде двух взаимно когерентных лучей 27 (L2), 28 (L1) на поверхность фотодетектора 11, установленного в фокусе линзы 25.
Устройство имеет оптические элементы ИК-техники [4]. Экран 24 с двумя отверстиями необходим для формирования двух лучей 27, 28 с разными доплеровскими сдвигами частот. Интерференционный светофильтр 23 необходим для получения монохроматического луча путем выделения одной линии спектра спонтанного излучения. Полоса пропускания фильтра несколько ангстрем [4].
При движении летательного аппарата с истинной воздушной скоростью V лучи 27, 28 приходят на поверхность фотодетектора с доплеровскими сдвигами частот, определяемыми формулами (1), что дает на выходе фотодетектора сигнал с частотой биения fбл, определяемой формулой (2). Этот сигнал поступает на полосовой фильтр 12 (фиг.5), пропускающий полосу доплеровских частот. Доплеровская частота измеряется частотно-следящей системой, которая включает перечисленные ранее блоки 13-19. На вход операционного усилителя 18 подается напряжение U=k(ω0-ωа), где ω0 - средняя доплеровская частота, ωа - частота, на которую настроен фильтр несущей частоты, отличающаяся от ω0, k - коэффициент. Напряжение U на выходе фильтра 16 пропорционально мгновенной доплеровской частоте (скорости изменения фазы доплеровского сигнала). На второй вход операционного усилителя подается опорное напряжение U′. Описанная схема частотно-следящей системы является известной схемой измерения доплеровских сигналов [5]. Выходное напряжение Uвых несет информацию о величине VХУsin(θ+β1) (см. формулу 3). Аналогично функционируют каналы 6, 7, 8 (фиг.4), несущие информацию VХУsin(θ-β1), VXZsin(θ+α), VXZsin(θ-α).
Значение проекции скорости VХУ и угла β1 определяются из системы уравнений (4). Значения VXZ и угла атаки α - из системы уравнений (5). Истинная воздушная скорость определяется по формулам (6). Угол β определяется уравнением (7). Вычисления производятся с помощью микропроцессора 9 (фиг.4), который дает на выходе значения V, α, β.
Тепловое движение излучающих частиц приводит к появлению доплеровского спектра частот, ширина которого тем больше, чем выше температура воздушной среды около точки, в которой фокусируется луч.
Поэтому мощность лазера ограничивается величиной, минимально необходимой для достаточного излучения среды.
Выделяемая оптическим фильтром рабочая линия спектра спонтанного излучения дает монохроматический луч с малой в отличие от лазерного длиной когерентности в силу спонтанного характера излучения возбуждаемой частицы и его малой продолжительности. Длина когерентности (расстояние на которой световая волна еще не накопила существенного сдвига фазы) для разреженного газа составляет величину порядка 10 см [6]. Указанная величина дает представление о порядке допустимых значений разности оптических путей двух лучей, смешиваемых на фотодетекторе, с точки зрения сохранения их взаимной когерентности. При измерении сверхзвуковых скоростей доплеровский сигнал не зависит от звуковых колебаний излучающих частиц, так как лазеры фокусируются за пределами звукового скачка. При измерении дозвуковых скоростей доплеровский сигнал отражает звуковые колебания частиц, влияние которых подавляется фильтром 19 (фиг.5).
Предлагаемый способ определения воздушно-скоростных параметров летательных аппаратов делает возможным измерение истинной воздушной скорости и углов атаки и скольжения с высокой точностью в условиях высокоскоростных маневренных полетов с потолком до 35 км, а также на траектории движения космических летательных аппаратов многоразового действия в атмосфере, что подтверждают проведенные исследования возбуждаемого лазером излучения воздушной среды, а также доплеровских сигналов в схеме измерения с оптическим и электрическими фильтрами в условиях физического моделирования, в то время как прототип работоспособен лишь на высотах от 3 до 10 км, где имеются отражающие частицы.
Источники информации
1. Клюев Г.И. и др. Авиационные приборы и системы. Учебное пособие. Ульяновск. УлГТУ, 2000, с.73, 113.
2. Robert M. Munor and others. Airborne Doppler Velocimeter. Applied Optics. Vol.13. №12. 1974.
3. Большая Советская Энциклопедия, том 24, книга 1, 1976, с.333.
4. Лазарев Л.П. Инфракрасные и световые приборы самонаведения и наведения летательных аппаратов. Изд. 3-е. М.: Машиностроение, 1976, с.329.
5. Дюррани Т., Грейтид К. Лазерные системы в гидродинамических измерениях. М. Энергия, 1980, с.85.
6. Большая Советская Энциклопедия. Изд.3-е, т.12, 1973, с.366.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ | 1993 |
|
RU2106658C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ЛАЗЕРНОГО ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2000 |
|
RU2243568C2 |
| МНОГОКАНАЛЬНЫЙ ДАТЧИК ПЫЛИ | 2018 |
|
RU2722066C2 |
| Лазерный доплеровский измеритель скорости | 1990 |
|
SU1748071A1 |
| Лазерный доплеровский измеритель скорости | 1983 |
|
SU1099284A1 |
| Двухкомпонентный лазерный анемометр | 1983 |
|
SU1078336A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДИСПЕРСНОЙ ФАЗЫ В АЭРОЗОЛЬНОМ ПОТОКЕ | 2021 |
|
RU2771880C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРОВ ВОЗДУШНОЙ И ЗЕМНОЙ СКОРОСТЕЙ, УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНОЕ ЛАЗЕРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2238521C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЯ КРОВИ | 2015 |
|
RU2610559C1 |
| СПОСОБ И ЛИДАРНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТЕЙ АТМОСФЕРЫ, ОСУЩЕСТВЛЯЕМОГО НА БОРТУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, А ТАКЖЕ В АЭРОПОРТАХ И НА ВЕТРОВЫХ ЭЛЕКТРОСТАНЦИЯХ | 2006 |
|
RU2405172C2 |

Изобретение относится к области информационно-измерительной техники летательных аппаратов и может быть использовано в приборных комплексах для измерения истинной воздушной скорости, углов атаки и скольжения на высотах, соответствующих потолку перспективных самолетов, и на траектории движения в атмосфере космических летательных аппаратов многоразового действия. Способ основан на измерении доплеровского сдвига частот излучения воздушной среды. Возбуждают лазером в допробойном режиме спонтанное излучение молекул воздушной среды в двух точках впереди летательного аппарата в его плоскости симметрии. Принимают на борту летательного аппарата излучение каждой точки, выделяя в нем одну спектральную составляющую в виде двух разнонаправленных взаимно когерентных лучей, лежащих в той же плоскости симметрии. Измеряют разности их частот с неодинаковыми доплеровскими сдвигами. То же делают, возбуждая спонтанное излучение в двух точках в перпендикулярной плоскости. По результатам измерений четырех разностей частот определяют значения истинной воздушной скорости, углов атаки и скольжения. Технический результат - повышение точности измерения истинной воздушной скорости, углов атаки и скольжения в условиях высокоскоростных маневренных полетов на больших высотах, в условиях отсутствия молей. 6 ил.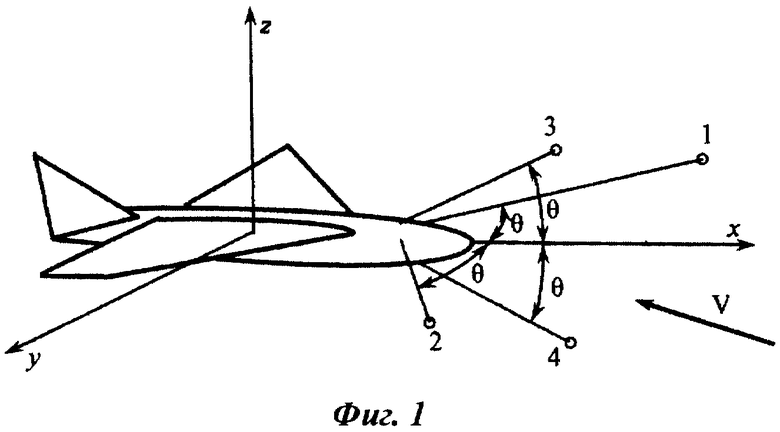
Способ определения воздушно-скоростных параметров летательных аппаратов, основанный на измерении доплеровского сдвига частот излучения воздушной среды, отличающийся тем, что возбуждают лазером в допробойном режиме спонтанное излучение молекул воздушной среды в двух точках впереди летательного аппарата в его плоскости симметрии, принимают на борту летательного аппарата излучение каждой точки, выделяя в нем одну спектральную составляющую в виде двух разнонаправленных взаимнокогерентных лучей, лежащих в той же плоскости симметрии, смешивая их, измеряют разности их частот с неодинаковыми доплеровскими сдвигами, то же самое делают, возбуждая спонтанное излучение в двух точках в перпендикулярной плоскости, проходящей через продольную ось летательного аппарата, и по результатам измерений четырех разностей частот определяют значения истинной воздушной скорости, углов атаки и скольжения.
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2192015C1 |
| US 3522729 A, 04.08.1970 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРОВ ВОЗДУШНОЙ И ЗЕМНОЙ СКОРОСТЕЙ, УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНОЕ ЛАЗЕРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2238521C1 |
| JP 7218628, 18.08.1995. | |||

