Изобретение относится к авиационному приборостроению, в частности к информационным средствам навигации, прицеливания и пилотирования летательных аппаратов (ЛА).
В настоящее время для определения на борту летательного аппарата составляющих вектора его воздушной скорости применяются датчики, построенные по принциу аэромеханического метода, суть которого в достаточной мере изложена в книге [1] Помыкаева И.И. и др. “Навигационные приборы и системы”. М.: Машиностроение, 1983, стр. 44-57. Метод основан на измерениях первичных аэромеханических параметров: рН - статического давления атмосферы, рП - полного давления набегающего потока воздуха (скоростного напора), ТТ - температуры заторможенного потока воздуха, α АТ - угла атаки, β СК - угла скольжения, и решении соответствующих уравнений связи. Так, для определения модуля истинной воздушной скорости V(t) решают известную систему уравнений:

- при дозвуковой скорости;

- при сверхзвуковой скорости,
где ξ - коэффициент торможения воздуха, равный ξ =0,98-1,02;
M(t) - число Маха;
k - показатель адиабаты для воздуха, равный k≈ 1,4;
g - ускорение земного тяготения, равное g≈ 9,81 м/с2;
R - газовая постоянная, равная R=29,27 м/° С.
Статическое рН(t) и полное pП(t) давления обычно воспринимаются с помощью трубки Пито и по специальным трубопроводам передаются соответственно в полости анероидной мембранной коробки, сильфона датчика высоты и сильфона датчика динамического давления, размещенного внутри этой коробки и потому определяющего сразу величину динамического рД=рП-рН давления. Углы атаки α АТ и скольжения β СК измеряются с помощью флюгеров, самоориентирующихся при полете ЛА по набегающему потоку. Температура заторможенного потока воздуха ТТ измеряется с помощью терморезистора, устанавливаемого в корпусе горловой части сопла приемника температуры. В [2] Патенте СССР №1693554 А1 “Датчик вектора воздушной скорости”, м. кл. G 01 Р 5/16, 1989 приведено устройство такого современного аэромеханического датчика, который, за неимением датчиков воздушной скорости другого принципа действия, рассматривается как аналог по назначению.
Все существующие в настоящее время датчики вектора воздушной скорости, в том числе и аналог, являются аэромеханическими и имеют низкую точность, особенно при энергичном маневрировании ЛА. Причины тому, во-первых, невозможность установки датчиков в невозмущенном потоке, во-вторых, инерционность системы передачи давлений из-за значительных объемов полостей анероидной мембранной коробки и сильфонов, высокого газодинамического сопротивления трубопроводов этих датчиков, в-третьих, инерционность термодатчиков, в-четвертых, влияние интенсивных и широкополосных колебаний ЛА вокруг центра массы, особенно на показания составляющих вектора воздушной скорости - датчиков углов атаки и скольжения.
Поскольку невозмущенный поток находится относительно ЛА на удалении не менее десятка метров, то для создания перспективного датчика вектора воздушной скорости аэромеханический метод был исключен из рассмотрения, и предлагается лазерный когерентный прибор, способный “бесконтактно дистанционно измерять скорости потоков жидкости и газов, а также твердых диффузионно-отражающих объектов” доплеровским методом ([3] Патент РФ №2177159 С1 “Следящий фильтр-процессор для обработки сигналов лазерного измерителя скорости”, м. кл. G 01 Р 5/26, 2000).
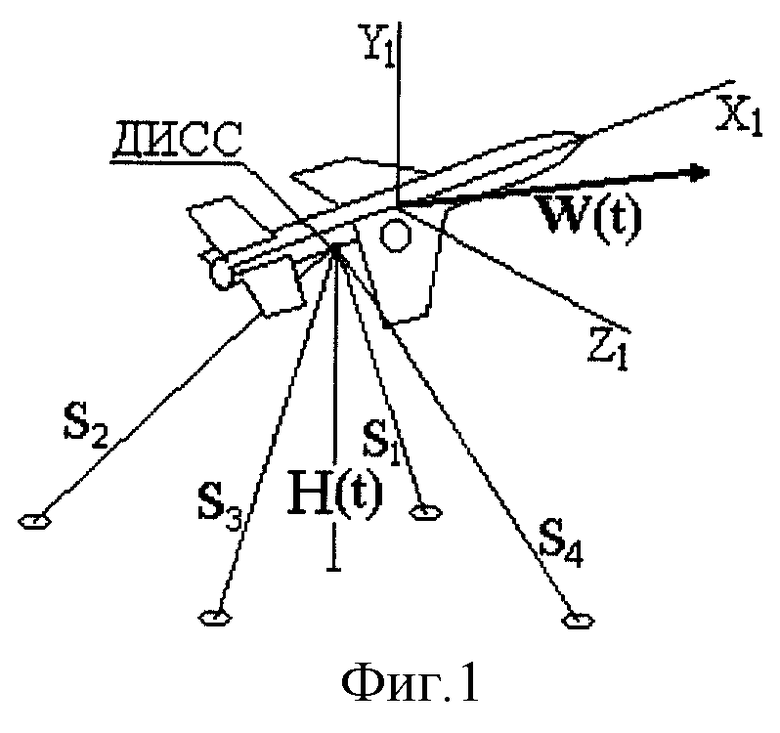
В качестве прототипа взят радиолокационный доплеровский измеритель (ДИСС) вектора земной скорости W(t) и угла сноса α СН(t) ЛА, в котором изначально с помощью радиолокационного измерителя доплеровских частот (РИДЧ) определяют доплеровские частоты FPi(t) по каждому из последовательно коммутируемых его приемопередающих радиолокационных каналов-лучей i (фиг.1). Доплеровские частоты FPi(t) в этом приборе, как известно, пропорциональны скорости сближения  ЛА с участком земной поверхности, визируемым его i каналом-лучом, где λ P - длина волны излучаемых радиолокационных колебаний. При условии выполнения в цикле коммутации успешных измерений доплеровских частот не менее чем по трем каналам-лучам решают систему из трех независимых уравнений с тремя неизвестными WX1(t), WY1(t), WZ1(t) - искомыми проекциями вектора земной скорости ЛА
ЛА с участком земной поверхности, визируемым его i каналом-лучом, где λ P - длина волны излучаемых радиолокационных колебаний. При условии выполнения в цикле коммутации успешных измерений доплеровских частот не менее чем по трем каналам-лучам решают систему из трех независимых уравнений с тремя неизвестными WX1(t), WY1(t), WZ1(t) - искомыми проекциями вектора земной скорости ЛА  на оси связанной с ЛА системы координат OX1Y1Z1:
на оси связанной с ЛА системы координат OX1Y1Z1:
где Θ рi, hрi - углы ориентации i-го луча ДИСС относительно связанной системы координат. Таким образом с помощью ДИСС определяют составляющие вектора земной скорости ЛА на оси связанной системы координат.
Здесь у прототипа имеется недостаток, определяемый допущением о постоянстве составляющих вектора земной скорости WX1(t), WY1(t), WZ1(t) при решении системы (1), что для современных маневрирующих и колеблющихся вокруг центра массы ЛА является грубым и тоже приводит к появлению ошибок.
Угол сноса в существующих ДИСС определяется зависимостью α СН(t)-arctg(WZ1(t)/WX1(t)) как угол между продольной осью ЛА O(t)X1 и проекцией вектора его земной скорости  на плоскость O(t)X1Z1 связанной системы координат O(t)X1Y1Z1, что, заметим, сразу является методической ошибкой, поскольку на самом деле этот угол заключен между двумя пересекающимися трехмерными векторами земной W(t) и воздушной V(t) скоростей.
на плоскость O(t)X1Z1 связанной системы координат O(t)X1Y1Z1, что, заметим, сразу является методической ошибкой, поскольку на самом деле этот угол заключен между двумя пересекающимися трехмерными векторами земной W(t) и воздушной V(t) скоростей.
Для перехода от связанной к стабилизированной гироинерциальной системе координат O(t)XgYgZg по существующему способу сначала по текущим значениям углов курса ψ (t), тангажа υ (t) и крена γ (t), измеряемых гироинерциальной навигационной системой (ГИНС), вычисляют тригонометрические функции этих углов sinψ (t), cosvψ (t), sinυ (t), cosυ (t), sinγ (t), cosγ (t), потом направляющие косинусы матрицы перехода M1← g(t) от стабилизированной гироинерциальной O(t)XgYgZg к связанной системе координат O(t)X1Y1Z1:









Эти громоздкие, трудоемкие вычисления тригонометрических функций sinψ (t), cosψ (t), sinυ (t), cosυ (t), sinγ (t), cosγ (t) направляющих косинусов (2) должны реализовываться в полном объеме за время каждого измерения по каждому лучу ДИСС  Это, а также существующий несинхронный редкий опрос показаний ГИНС об углах ψ (t), υ (t), γ (t), неточности определения этих углов, многократное повторение и накопление указанных ошибок при формировании направляющих косинусов (2), ограниченная производительность бортовых цифровых вычислительных машин не обеспечивают требуемые быстродействие и точность преобразований.
Это, а также существующий несинхронный редкий опрос показаний ГИНС об углах ψ (t), υ (t), γ (t), неточности определения этих углов, многократное повторение и накопление указанных ошибок при формировании направляющих косинусов (2), ограниченная производительность бортовых цифровых вычислительных машин не обеспечивают требуемые быстродействие и точность преобразований.
Далее по существующему способу с помощью (2) матрицы перехода Mg← 1(t) определяют проекции WXg(t), WYg(t), WZg(t) вектора земной скорости W(t) на оси стабилизированной гироинерциальной системы координат:



Из (3) вычитают текущие показания ГИНС WГXg(t), WГYg(t), WГZg(t) и полученными разностями:



корректируют показания ГИНС о векторе земной скорости ЛА:

Существенным недостатком существующего способа является и то, что при потере сигнала в канале-луче на последующих циклах коммутации осуществляют поиск сигнала во всем рабочем диапазоне доплеровских частот ([4] Техническое описание ДИСС-7, кн.1, Редакция ГМ1.641.007ТО, 1972, стр. 41-43), что требует значительного времени и приводит либо к повторному пропуску измерения, либо к захвату помехи и ложному измерению, либо к захвату требуемой доплеровской частоты и возобновлению измерений.
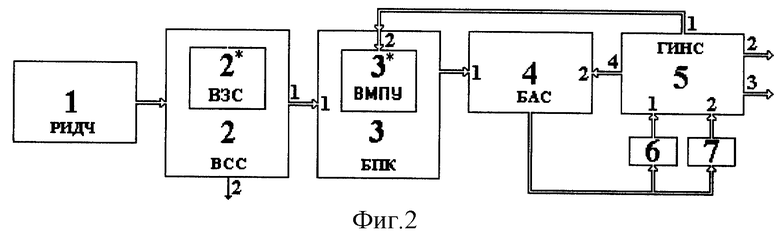
Обобщенная структурная схема устройства ДИСС, реализующего существующий способ получения вектора земной скорости, приведена на фиг.2 ([1], стр.393-396), где обозначено:
1 - радиолокационный измеритель доплеровских частот FPi(t) (РИДЧ), 2 - вычислитель земной скорости и угла сноса (ВСС), с встроенным внутри него вычислителем вектора земной скорости ЛА (2* - ВЗС), 3 - блок преобразования координат (БПК) с встроенным внутри него вычислителем по углам матрицы перехода от стабилизированной гироинерциальной к связаной системе координат (3* - ВМПУ), 4 - блок алгебраического суммирования (БАС), 5 - гироинерциальная навигационная система (ГИНС), 6 и 7 - фильтры цепей коррекции интеграторов ГИНС.
С выхода радиолокационного измерителя доплеровских частот 1 значения измеренных по каналам-лучам доплеровских частот FPi(t) поступают на вход вычислителя скорости и угла сноса 2, где в вычислителе вектора земной сорости ЛА 2* решается система уравнений (1) и вычисляются составляющие этого вектора WX1(t), WY1(t), WZ1(t) в связанной с ЛА системы координат. В ВСС 2 по ошибочной формуле вычисляется и угол сноса α CH(t), который сразу с второго выхода направляется внешним потребителям. С первого выхода вычислителя скорости и угла сноса 2 значения WX1(t), WY1(t), WZ1(t) поступают на первый вход блока преобразования координат 3, на второй вход которого подают с первого выхода гироинерциальной навигационной системы 5 текущие значения углов курса ψ (t), тангажа υ (t) и крена γ (t) ЛА для формирования в вычислителе 3 по углам матрицы перехода от стабилизированной гироинерциальной к связанной системе координат. С выхода блока преобразования координат 3 вычисленные по данным радиолокационного измерителя доплеровских частот 1 значения вектора земной скорости ЛА  , но теперь по составляющим стабилизированной гироинерциальной O(t)XgYgZg системы координат, подаются на первый вход блока алгебраического суммирования 4, на второй вход которого поступают с четвертого выхода гироинерциальной навигационной системы 5 вычисленные ею аналогичные параметры WГX1(t), WГY1(t), WГZ1(t). Разности соответствующих параметров Δ WXg(t), Δ WYg(t), Δ WZg(t) с выхода блока алгебраического суммирования 4 направляют на входы фильтров 6 и 7, выходы которых связаны соответственно с первым и вторым входами гироинерциальной навигационной системы 5, а внутри нее, соответственно, с корректирующими входами интеграторов первого и второго каналов гироинерциальной навигационной системы 5. Бортовым потребителям со второго выхода гироинерциальной навигационной системы 5 выдаются значения вектора линейной земной скорости ЛА
, но теперь по составляющим стабилизированной гироинерциальной O(t)XgYgZg системы координат, подаются на первый вход блока алгебраического суммирования 4, на второй вход которого поступают с четвертого выхода гироинерциальной навигационной системы 5 вычисленные ею аналогичные параметры WГX1(t), WГY1(t), WГZ1(t). Разности соответствующих параметров Δ WXg(t), Δ WYg(t), Δ WZg(t) с выхода блока алгебраического суммирования 4 направляют на входы фильтров 6 и 7, выходы которых связаны соответственно с первым и вторым входами гироинерциальной навигационной системы 5, а внутри нее, соответственно, с корректирующими входами интеграторов первого и второго каналов гироинерциальной навигационной системы 5. Бортовым потребителям со второго выхода гироинерциальной навигационной системы 5 выдаются значения вектора линейной земной скорости ЛА  .
.
Описанная обобщенная структурная схема устройства прототипа соответствует способу и потому реализует присущие ему недостатки.
Задача, на решение которой направлено заявляемое изобретение, состоит в повышении точности определения векторов воздушной и земной скоростей, угла сноса, в том числе и маневрирующих летательных аппаратов.
Предлагается при построении датчика векторов воздушной и земной скоростей, угла сноса ЛА вместо радиолокационного λ P использовать оптический λ O диапазон волн и методом когерентной локации при известной узкой направленности лазерных лучей и с применением временного стробирования раздельно получать даже при едином зондирующем сигнале доплеровские частоты FOi(t) сигналов, отраженных (фиг.3) не только от земной поверхности (З1, З2, З3, З4) F
Система уравнений (1) ДИСС для лазерных датчиков векторов воздушной и земной скоростей, угла сноса (ЛДВВЗСС) при временном τ B стробировании сигналов “ближней зоны” B1, B2, В3, В4, отраженных от воздушной среды, имела бы вид:
где VX1(t), VY1(t), VZ1(t) - искомые значение проекций вектора воздушной скорости ЛА на оси связанной системы координат;
Θ Oi(t), hOi(t) - углы ориентации i-го луча лазерного измерителя доплеровской частоты (ЛИДЧ) относительно связанной системы координат.
При временном τ 3 стробировании “дальней зоны” З1, З2, З3, З4 получают сигналы, отраженные от земной поверхности, и представляется возможным, как и в ДИСС (1), определять проекции вектора земной скорости WX1(t), WY1(t), WZ1(t):
Переход при создании ЛДВВЗСС, с одной стороны, от аэромеханического к доплеровскому методу, с другой стороны от радиолокационного к оптическому диапазону волн и внедрению операции стробирования зон отраженных сигналов позволяют устранить отмеченные выше первые три причины погрешностей измерений и сделать датчик комплексным, способным определять не только вектор земной W(t), но и вектор воздушной V(t) скорости ЛА, а также угол сноса α СН(1) как угол между трехмерными векторами воздушной и земной скоростей (см. фиг.3).
Четвертый источник ошибок измерений - влияние колебаний ЛА вокруг центра массы, предлагается устранять путем внедрения дополнительных операций по быстрому переводу результатов каждого измерения ЛДВВЗСС из колеблющейся связанной системы координат в стабилизированную гиро-инерциальную, поскольку в этой системе координат наблюдается истинная картина, когда не вектора скоростей колеблются относительно ЛА, а наоборот, ЛА колеблется вокруг векторов воздушной и земной скоростей, оба же вектора друг относительно друга устойчивы и практически изменяются плавно и синхронно в зависимости от вектора линейного ускорения j(t) ЛА.
Предлагается текущие значения направляющих косинусов матрицы перехода M1← g(t) получать более точным, простым, быстродействующим способом - методом интегрирования дифференциальных кинематических уравнений Пуассона:









где ω x(t), ω y(t), ω z(t) - абсолютные угловые скорости вращения ЛА вокруг центра массы, измеряемые с помощью дополнительно включаемого блока прецизионных датчиков абсолютных угловых скоростей (БДУС), а существующий аллгоритм использовать эпизодически только в моменты времени t0 ввода начальных/корректируемых значений направляющих косинусов:








Причем в эти же t0 моменты времени синхронно находят разности между (9) и значениями ϕ 11(t), ϕ 12(t), ϕ 13(t), ϕ 21(t), ϕ 22(t), ϕ 23(t), ϕ 31(t), ϕ 32(t), ϕ 33(t) на выходе интеграторов:









Выявленные таким образом накопившиеся ошибки интегрирования дифференциальных уравнений (8) используют даже с возможной задержкой по времени t0+δ t как новые начальные значения:









которые вводят после очередного обнуления интеграторов и незамедлительно вновь запускают интеграторы для получения уточненных текущих значений направляющих косинусов ϕ 11(t), ϕ 12(t), ϕ 13(t), ϕ 21(t), ϕ 22(t), ϕ 23(t), ϕ 31(t), ϕ 32(t), ϕ 33(t).
Предлагаемый способ получения направляющих косинусов матрицы перехода от связаной к стабилизированной гироинерциальной системе координат в совокупности обладает большим быстродействием, легче реализуется в реальном масштабе времени даже при повышенной частоте коммутации лучей, открывает возможность считывания направляющих косинусов не только синхронно, но и с требуемой высокой частотой, вплоть до частоты шага интегрирования дифференциальных уравнений Пуассона.
Дополнительно, перед коммутацией очередного 1-го луча ЛИДЧ, определяют направляющие косинусы матрицы перехода MЛi← g(t) от стабилизированной гироинерциальной O(t)XgYgZg системы координат к оси O(t)XЛi лучевой системы координат путем перемножения известных матриц:

где SXi(t), SYi(t), SZi(t) - направляющие косинусы матрицы MЛi← 1(t) перехода от связанной O(t)X1Y1Z1 к оси O(t)XЛi лучевой системы координат ЛИДЧ, которые определяются функциями углов Θ Oi(t), hOi(t):



Дополнительно включают имеющиеся на борту ЛА измерения высоты полета H(t) и определяют временную границу τ i(t) между “ближней” и “дальней” зонами стробирования сигналов, отраженных порознь от атмосферы и земли, при текущих значениях пространственной ориентации очередного i луча ЛИДЧ, в том числе и маневрирующего ЛА, например, с использованием зависимости:

где с - скорость света.
При τ B<τ i(t) по данным от дополнительно введенного блока счисления вектора воздушной скорости (БСВВС), в котором реализуются уравнения:



где WXg(t0), WYg(t0), WZg(t0) - начальные значения вектора воздушной скорости, в качестве которых при t0 взяты от ГИНС составляющие вектора земной скорости;
jXg(t), jYg(t), jZg(t) - текущие значения вектора ускорения ЛА, дополнительно полученные от блока датчиков линейных ускорений  и преобразованные с помощью (8) в проекции стабилизированной гироинерциальной системы координат
и преобразованные с помощью (8) в проекции стабилизированной гироинерциальной системы координат 
Δ V*Xg(t), Δ V*Yg(t), Δ V*Zg(t) - текущие значения корректирующих поправок, формируемых ЛДВВЗСС, как это показано ниже (21),
получают текущее значение этого вектора  по составляющим в стабилизированной гироинерциальной системе координат (15) и определяют прогнозируемое значение
по составляющим в стабилизированной гироинерциальной системе координат (15) и определяют прогнозируемое значение  скорости сближения по i-му лучу с воздушной средой:
скорости сближения по i-му лучу с воздушной средой:

Настраивают прогнозируемым значением скорости сближения  доплеровский фильтр i-го луча ЛИДЧ, что позволяет отказаться от режима поиска доплеровского сигнала по всему диапазону и искать его в локальной области
доплеровский фильтр i-го луча ЛИДЧ, что позволяет отказаться от режима поиска доплеровского сигнала по всему диапазону и искать его в локальной области  . Это повышает не только быстродействие и надежность повторного захвата, но и устойчивость, точность комплексных одновременных измерений ЛДВВЗСС. После этого коммутируют i-й луч ЛИДЧ для производства измерений. При состоявшемся измерении в “ближней” зоне, то есть по воздушной среде, определяют невязку
. Это повышает не только быстродействие и надежность повторного захвата, но и устойчивость, точность комплексных одновременных измерений ЛДВВЗСС. После этого коммутируют i-й луч ЛИДЧ для производства измерений. При состоявшемся измерении в “ближней” зоне, то есть по воздушной среде, определяют невязку 

По полученной невязке  формируют очередное уравнение системы типа (6) применительно к составляющим соответственно вектора не воздушной скорости ЛА VX1(t), VY1(t), VZ1(t), как в (6), а приращений воздушной скорости Δ VX1(t), Δ VY1(t), Δ VZ1(t)
формируют очередное уравнение системы типа (6) применительно к составляющим соответственно вектора не воздушной скорости ЛА VX1(t), VY1(t), VZ1(t), как в (6), а приращений воздушной скорости Δ VX1(t), Δ VY1(t), Δ VZ1(t)

Вычисленные с помощью системы (18) значения Δ V(t) приращений воздушной скорости ЛА по составляющим в связанной системе координат O(t)X1Y1Z1

с помощью уже вычисленных направляющих косинусов (8) транспонированной матрицы перехода M

Далее производят статистическую обработку составляющих вектора приращений воздушной скорости, например, по методу скользящего среднего на выборке n:

и полученными таким образом оценками приращений Δ V*Xg(t), Δ V*Yg(t), Δ VZg(t) корректируют соответственно поканально показания БСВВС (15), получая в итоге более точные и надежные текущие значения вектора воздушной скорости ЛА  :
:

При τ З>τ i(t) по данным ГИНС о составляющих WXg(t), WYg(t), WZg(t) вектора  земной скорости ЛА определяют прогнозируемое значение
земной скорости ЛА определяют прогнозируемое значение  скорости сближения по i-му лучу с визируемой земной поверхностью:
скорости сближения по i-му лучу с визируемой земной поверхностью:

опять же определяют невязку  :
:

формируют систему уравнений типа (7), но применительно к составляющим вектора приращений земной скорости Δ WX1(t), Δ WY1(t), Δ WZi(t):

вычисляют по (25) с помощью существующего вычислителя 2* не вектор земной скорости ЛА W(t), а его приращения Δ W(t) по составляющим в связанной системе координат:

а затем, применяя опять же (8) транспонированную матрицу перехода M

Заметим еще раз, что существующий вычислитель ВЗС 2* используют по новому назначению - как вычислитель приращений вектора земной скорости ВПЗС.
Далее опять же выполняют статистическую обработку:
и полученными таким образом оценками приращений Δ W*Xg(t), Δ WYg(t), Δ WZg(t) корректируют ГИНС, получая в итоге более точные и надежные текущие значения вектора земной скорости  ЛА:
ЛА:

Введение параметра невязки  и как следствие приведение системы основополагающих уравнений (18) и (25) к приращениям векторов скоростей Δ V(t), Δ W(t) снимает недостаток, связанный с имевшим место допущением о постоянстве векторов V(t), W(t) на интервале полного цикла измерений, обеспечивает получение более точных значений (21), (28) оценок Δ V*(t), Δ W*(t) и опять же самих векторов скоростей
и как следствие приведение системы основополагающих уравнений (18) и (25) к приращениям векторов скоростей Δ V(t), Δ W(t) снимает недостаток, связанный с имевшим место допущением о постоянстве векторов V(t), W(t) на интервале полного цикла измерений, обеспечивает получение более точных значений (21), (28) оценок Δ V*(t), Δ W*(t) и опять же самих векторов скоростей  и
и  .
.
Угол сноса α СН(t) определяют как угол между трехмерными векторами  и
и 






Горизонтальная α СН.Г·(t) и вертикальная α СН.B·(t) составляющие угла сноса могут быть вычислены соответственно по формулам:


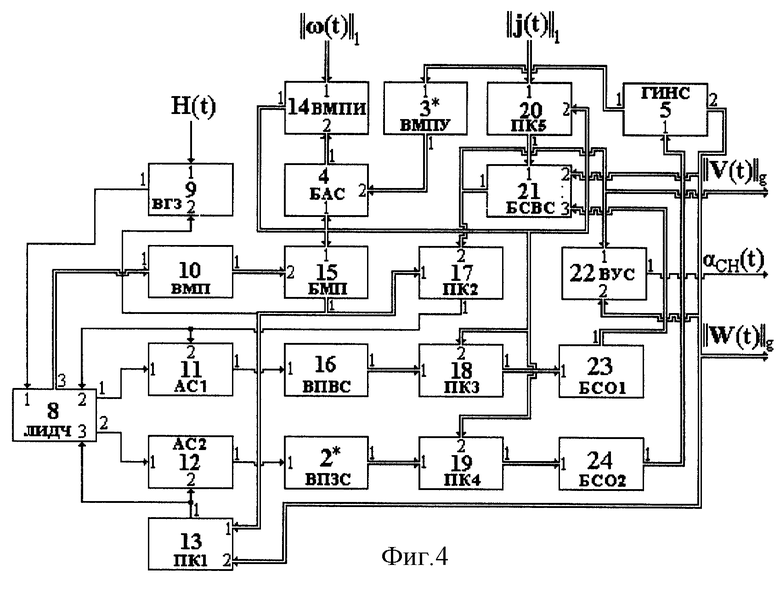
На фиг.4 приведена структурная схема комплексного лазерного устройства, реализующего предлагаемый способ определения векторов воздушной и земной скоростей, угла сноса летательного аппарата, где модули прототипа: 4 - блок алгебраического суммирования (БАС), 2* - вычислитель приращений вектора земной скорости ВПЗС как часть вычислителя земной скорости и угла сноса (ВСС 2, см. фиг.2 ), 3 - вычислитель по углам матрицы перехода от стабилизированной гироинерциальной к связанной системе координат (ВМПУ) как часть блока преобразования координат (БПК 3, см. фиг.2), 5 - гироинерциальная навигационная система (ГИНС) сохранены; исключены (см. фиг.2 и 4): 1 - радиолокационный измеритель доплеровских частот, 6 и 7 - фильтры цепей коррекции интеграторов ГИНС; дополнительно введены: 8 - лазерный измеритель доплеровских частот (ЛИДЧ), 9 - вычислитель границы зон стробирования “воздух-земля” (ВГЗ), 10 - вычислитель матрицы перехода между связанной и лучевой системами координат (ВМП), 11, 12 - первый и второй алгебраические сумматоры (АС1, АС2), 13, 17, 18, 19, 20 - первый, второй, третий, четвертый и пятый преобразователи координат (ПК1, ПК2, ПК3, ПК4, ПК5), 14 - вычислитель матрицы перехода между стабилизированной гироинерциальной и связанной системами координат интеграторный (ВМПИ), 15 - блок перемножения матриц (БПМ), 16 - вычислитель приращений воздушной скорости (ВПВС), 21 - блок счисления воздушной скорости (БСВС), 22 - вычислитель угла сноса (ВУС); 23, 24 - первый и второй блоки статистической обработки (БСО1, БСО2).
Предлагаемое комплексное лазерное устройство характеризуется следующими связями. Лазерный измеритель доплеровских частот 8 первым и вторым выходами соединен с первыми входами соответственно первого 11 и второго 12 алгебраического сумматора, первым входом с выходом вычислителя границы зон стробирования “воздух-земля” 9, вторым и третьим входами с выходами второго 17 и первого 13 преобразователей координат соответственно, третьим выходом с входом вычислителя матрицы перехода между связанной и лучевой системами координат 10. Вычислители приращений воздушных 16 и земных 2* скоростей входами связаны с выходами соответственно первого 11 и второго 12 алгебраических сумматоров, а выходами с первыми входами третьего 18 и четвертого 19 преобразователей координат, которые, в свою очередь, выходами подключены к входам соответственно первого 23 и второго 24 блоков статистической обработки.
Гироинерциальная навигационная система 5 соединена входом с выходом второго блока статистической обработки 24, первым выходом, несущим информацию об углах курса ψ (t), тангажа υ (t) и крена γ (t) ЛА, с вычислителем по этим углам матрицы перехода от стабилизированной гироинерциальной к связанной системе координат 3, вторым выходом, несущим информацию о векторе земной скорости  ЛА, одновременно со вторыми входами блока счисления воздушной скорости 21, вычислителя угла сноса 22, первого преобразователя координат 13, а также внешними потребителями этой информации. Блок счисления воздушной скорости 21 связан первым входом с выходом пятого преобразователя координат 20, третьим входом с выходом первого блока статистической обработки 23, а выходом, несущим информацию о векторе воздушной скорости
ЛА, одновременно со вторыми входами блока счисления воздушной скорости 21, вычислителя угла сноса 22, первого преобразователя координат 13, а также внешними потребителями этой информации. Блок счисления воздушной скорости 21 связан первым входом с выходом пятого преобразователя координат 20, третьим входом с выходом первого блока статистической обработки 23, а выходом, несущим информацию о векторе воздушной скорости  ЛА, одновременно со вторым входом второго преобразователя координат 17, первым входом вычислителя угла сноса 22, а также внешними потребителями этой информации. Выход вычислителя угла сноса 22 подключен к внешним потребителям информации об угле сноса α СН(t). Вычислитель матрицы перехода между стабилизированной гироинерциальной и связанной системами координат интеграторный 14 соединен первым входом с внешним блоком датчиков абсолютных угловых скоростей
ЛА, одновременно со вторым входом второго преобразователя координат 17, первым входом вычислителя угла сноса 22, а также внешними потребителями этой информации. Выход вычислителя угла сноса 22 подключен к внешним потребителям информации об угле сноса α СН(t). Вычислитель матрицы перехода между стабилизированной гироинерциальной и связанной системами координат интеграторный 14 соединен первым входом с внешним блоком датчиков абсолютных угловых скоростей  ЛА, вторым входом с выходом блока алгебраических сумматоров 4, а выходом одновременно с первыми входами указанного блока сумматоров 4 и блока перемножения матриц 15, вторыми входами третьего 18, четвертого 19 и пятого 20 преобразователей координат. Первый вход пятого 20 преобразователя координат связан с внешним блоком датчиков линейных ускорений ЛА
ЛА, вторым входом с выходом блока алгебраических сумматоров 4, а выходом одновременно с первыми входами указанного блока сумматоров 4 и блока перемножения матриц 15, вторыми входами третьего 18, четвертого 19 и пятого 20 преобразователей координат. Первый вход пятого 20 преобразователя координат связан с внешним блоком датчиков линейных ускорений ЛА  . Блок перемножения матриц 15 вторым входом соединен с выходом вычислителя матрицы перехода между связанной и лучевой системами координат 10, а выходом одновременно со вторым входом вычислителя границы зон стробирования “воздух-земля” 9, с первыми входами первого 13 и второго 17 преобразователей координат. Первый вход вычислителя границы зон стробирования “воздух-земля” 9 связан с внешним датчиком высоты ЛА H(t). Вторые входы первого 11 и второго 12 алгебраических сумматоров соединены соответственно с выходами второго 17 и первого 13 преобразователей координат. Второй вход блока алгебраических сумматоров 4 связан с выходом вычислителя по углам матрицы перехода от стабилизированной гироинерциальной к связанной системе координат 3*.
. Блок перемножения матриц 15 вторым входом соединен с выходом вычислителя матрицы перехода между связанной и лучевой системами координат 10, а выходом одновременно со вторым входом вычислителя границы зон стробирования “воздух-земля” 9, с первыми входами первого 13 и второго 17 преобразователей координат. Первый вход вычислителя границы зон стробирования “воздух-земля” 9 связан с внешним датчиком высоты ЛА H(t). Вторые входы первого 11 и второго 12 алгебраических сумматоров соединены соответственно с выходами второго 17 и первого 13 преобразователей координат. Второй вход блока алгебраических сумматоров 4 связан с выходом вычислителя по углам матрицы перехода от стабилизированной гироинерциальной к связанной системе координат 3*.
Комплексное лазерное устройство работает следующим образом. На первый вход лазерного измерителя доплеровских частот 8 при излучении каждого зондирующего сигнала поступает с выхода вычислителя границы зон стробирования “воздух-земля” 9 строб временного разрешения приема отраженных сигналов сначала “ближней” зоны τ B(t), то есть от атмосферы, потом “дальней” зоны τ З(t), то есть от земной поверхности. На второй и третий входы лазерного измерителя доплеровских частот 8 для настройки доплеровских фильтров i-го луча на ожидаемые частоты сигналов  подают значения прогнозируемых скоростей сближения с визируемыми участками атмосферы (16)
подают значения прогнозируемых скоростей сближения с визируемыми участками атмосферы (16)  - с выхода второго преобразователя координат 17 и земной поверхности (23)
- с выхода второго преобразователя координат 17 и земной поверхности (23)  - с выхода первого преобразователи координат 13 соответственно. Сигналы с первого и второго выходов лазерного измерителя доплеровских частот 8
- с выхода первого преобразователи координат 13 соответственно. Сигналы с первого и второго выходов лазерного измерителя доплеровских частот 8 
 пропорциональные
пропорциональные  измеренным значениям доплеровских частот F
измеренным значениям доплеровских частот F ,
,  , и полученные невязки
, и полученные невязки 
 с выходов соответственно первого 11 и второго 12 алгебраических сумматоров направляют на входы вычислителей приращений векторов воздушной 16 и земной 2* скоростей, где решаются системы независимых уравнений (18), (25) и находятся значения приращений векторов соответственно воздушной
с выходов соответственно первого 11 и второго 12 алгебраических сумматоров направляют на входы вычислителей приращений векторов воздушной 16 и земной 2* скоростей, где решаются системы независимых уравнений (18), (25) и находятся значения приращений векторов соответственно воздушной  и земной
и земной  скоростей в связанной системе координат. Далее значения этих векторов с выходов вычислителей приращений воздушной 16 и земной 2 скоростей подаются соответственно на первые входы третьего 18 и четвертого 19 преобразователей координат, где они преобразуются (20), (27) соответственно в проекции на оси стабилизированной гироинерциальной системы координат
скоростей в связанной системе координат. Далее значения этих векторов с выходов вычислителей приращений воздушной 16 и земной 2 скоростей подаются соответственно на первые входы третьего 18 и четвертого 19 преобразователей координат, где они преобразуются (20), (27) соответственно в проекции на оси стабилизированной гироинерциальной системы координат 
 и направляются с выходов третьего 18 и четвертого 19 преобразователей координат соответственно на входы первого 23 и второго 24 блоков статистической обработки. Полученные в результате статистической обработки оценки (21) Δ V*(t) и (28) Δ W*(t) с выходов блоков 23, 24 направляют порознь соответственно на третий вход блока счисления воздушной скорости 21 и первый вход гироинерциальной навигационной системы 5 для коррекции (15), (29) текущих значений соответственно
и направляются с выходов третьего 18 и четвертого 19 преобразователей координат соответственно на входы первого 23 и второго 24 блоков статистической обработки. Полученные в результате статистической обработки оценки (21) Δ V*(t) и (28) Δ W*(t) с выходов блоков 23, 24 направляют порознь соответственно на третий вход блока счисления воздушной скорости 21 и первый вход гироинерциальной навигационной системы 5 для коррекции (15), (29) текущих значений соответственно 
 . Гироинерциальная навигационная система 5 соединена выходами: первым, несущим информацию об углах курса ψ (t), тангажа υ (t) и крена γ (t) ЛA, с вычислителем по этим углам (2) матрицы перехода M1← g(t) от стабилизированной гироинерциальной к связанной системе координат 3*, вторым, несущим информацию о векторе земной скорости
. Гироинерциальная навигационная система 5 соединена выходами: первым, несущим информацию об углах курса ψ (t), тангажа υ (t) и крена γ (t) ЛA, с вычислителем по этим углам (2) матрицы перехода M1← g(t) от стабилизированной гироинерциальной к связанной системе координат 3*, вторым, несущим информацию о векторе земной скорости  ЛА, одновременно, со вторыми входами блока счисления воздушной скорости 21, вычислителя угла сноса 22, первого преобразователя координат 13, а также внешними потребителями этой информации. Вычислитель матрицы перехода между стабилизированной гироинерциальной и связанной системами координат интеграторный 14 первым входом соединен с внешним блоком датчиков угловых скоростей для приема текущих значений абсолютных угловых скоростей
ЛА, одновременно, со вторыми входами блока счисления воздушной скорости 21, вычислителя угла сноса 22, первого преобразователя координат 13, а также внешними потребителями этой информации. Вычислитель матрицы перехода между стабилизированной гироинерциальной и связанной системами координат интеграторный 14 первым входом соединен с внешним блоком датчиков угловых скоростей для приема текущих значений абсолютных угловых скоростей  ЛА, входящими в правые части интегрируемых дифференциальных уравнений (8), вторым входом в моменты времени t0 с выходом блока алгебраических сумматоров 4 для приема (10), (11) начальных/корректирующих значений направляющих косинусов, а выходом одновременно с первыми входами блоков алгебраических сумматоров 4 и перемножения матриц 15, со вторыми входами третьего 18, четвертого 19 и пятого 20 преобразователей координат. На второй вход блока алгебраического суммирования 4 в моменты t0 с выхода вычислителя по углам матрицы перехода от стабилизированной гироинерциальной к связанной системе координат 3* подаются значения направляющих косинусов, вычисленных по формулам (9).
ЛА, входящими в правые части интегрируемых дифференциальных уравнений (8), вторым входом в моменты времени t0 с выходом блока алгебраических сумматоров 4 для приема (10), (11) начальных/корректирующих значений направляющих косинусов, а выходом одновременно с первыми входами блоков алгебраических сумматоров 4 и перемножения матриц 15, со вторыми входами третьего 18, четвертого 19 и пятого 20 преобразователей координат. На второй вход блока алгебраического суммирования 4 в моменты t0 с выхода вычислителя по углам матрицы перехода от стабилизированной гироинерциальной к связанной системе координат 3* подаются значения направляющих косинусов, вычисленных по формулам (9).
Блок счисления воздушной скорости 21, где интегрируется система дифференциальных уравнений (15), связан первым входом с выходом пятого преобразователя координат 20, а выходом, несущим информацию о векторе воздушной скорости  ЛА, одновременно со вторым входом второго преобразователя координат 17, первым входом вычислителя угла сноса 22, а также внешними потребителями этой информации. Первый вход пятого 20 преобразователя координат связан с внешним блоком датчиков линейных ускорений ЛА
ЛА, одновременно со вторым входом второго преобразователя координат 17, первым входом вычислителя угла сноса 22, а также внешними потребителями этой информации. Первый вход пятого 20 преобразователя координат связан с внешним блоком датчиков линейных ускорений ЛА  . Вычислитель угла сноса 22, в котором реализуются зависимости (30), выходом подключен к внешним потребителям информации об угле сноса α СН(t).
. Вычислитель угла сноса 22, в котором реализуются зависимости (30), выходом подключен к внешним потребителям информации об угле сноса α СН(t).
На вход вычислителя матрицы перехода между связанной и лучевой системами координат 10 подаются с третьего выхода лазерного измерителя доплеровских частот 8 значения углов Θ Oi(t), hOi(t) ориентации i-го луча относительно связанной системы координат для определения направляющих косинусов (13), которые с выхода этого вычислителя поступают на второй вход блока перемножения матриц 15, где реализуется зависимость (12), определяющая направляющие косинусы матрицы перехода MЛi← g(t) от стабилизированной гироинерциальной системы координат к оси О(t)ХЛi лучевой системы координат. С выхода блока перемножения матриц 15 значения этих направляющих косинусов в полном составе μ 11i(t), μ 12i(t), μ 13i(t) направляются на первые входы первого 13 и второго 17 преобразователей координат для реализации зависимостей (16) и (23) соответственно, в усеченном составе μ 12i(t) на второй вход вычислителя границы зон стробирования “воздух-земля” 9 для реализации формулы (14).
Изобретение относится к авиационному приборостроению, в частности к информационным средствам навигации, прицеливания и пилотирования летательных аппаратов (ЛА). В предлагаемом способе измерения доплеровских частот выполняют в оптическом диапазоне электромагнитных волн, вводят дополнительную операцию стробирования оптических сигналов, отраженных как от земной поверхности, так и от воздушной среды, выделяют доплеровские частоты относительно воздушной и земной сред, дополнительно осуществляют счисление вектора воздушной скорости летательного аппарата, решают порознь две соответствующие системы кинематических уравнений и полученными оценками корректируют соответственно гироинерциальную навигационную систему и систему счисления вектора воздушной скорости, получая таким образом на их выходе уточненные значения векторов земной и воздушной скоростей летательного аппарата, угол сноса определяют как угол между трехмерными векторами земной и воздушной скоростей летательного аппарата. Комплексное лазерное устройство, реализующее способ, содержит лазерный измеритель доплеровских частот, блок счисления вектора воздушной скорости, вычислитель границы зон стробирования “воздух-земля”, приращений земной и воздушной скоростей, угла сноса, матрицы перехода между связанной и лучевой системами координат, два бока статистической обработки, пять преобразователей координат, три изменяющихся устройства. Техническим результатом является повышение точности и устойчивости определения одновременно векторов воздушной и земной скоростей, а также угла сноса ЛА. 2 с.п. ф-лы, 4 ил.

| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СЛЕДЯЩИЙ ФИЛЬТР-ПРОЦЕССОР ДЛЯ ОБРАБОТКИ СИГНАЛОВ ЛАЗЕРНОГО ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2000 |
|
RU2177159C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА | 2000 |
|
RU2178146C1 |
| Способ хирургического лечения анкилоза височно-нижнечелюстного сустава | 1980 |
|
SU938956A1 |
| US 3719923 А, 06.03.1973. | |||

