Настоящее изобретение относится к области дистанционного управления содержащими электрические приборы имплантатами, без использования материального соединения.
Настоящее изобретение касается, в частности, способа и устройства для бесконтактного дистанционного управления имплантатом, содержащим электрический прибор, при этом указанное устройство содержит источник индукции, являющийся источником энергии для обеспечения работы указанного электрического прибора.
Из предшествующего уровня известны способы и устройства для бесконтактного дистанционного управления имплантатами, содержащими электрические приборы, в частности, описанные в международной патентной заявке WO 00/15158.
В этой заявке раскрыто устройство для стимуляции сокращения желудка специального типа, которое может применяться дистанционно без использования материального соединения благодаря наличию передатчика, содержащего источник индукции. Источник индукции передает энергию для приведения в действие двигателя, при этом используются специальные частоты, одна из которых включает режим переднего хода, а другая - режим заднего хода.
Основным недостатком этого устройства является то, что оно передает только две команды: передний ход и задний ход. Данное устройство не содержит никакого средства для того, чтобы убедиться в том, что команда принята, что она выполнена и в какой степени она выполнена. Кроме того, это устройство не гарантирует должным образом против несвоевременного срабатывания электрического прибора имплантата.
Существуют также устройства, выполненные с возможностью осуществления связи с имплантатами, однако в этих системах имплантат содержит свой собственный источник энергии для обеспечения работы электрического прибора (двигатель или иной источник); естественно, это не практично для имплантатов, для которых требуется много энергии как с точки зрения мощности, так и в плане продолжительности действия, поскольку в этом случае понадобится регулярно менять источник энергии путем хирургической операции.
Целью настоящего изобретения является устранение этих недостатков известных устройств, для чего предлагается способ и устройство управления, способные одновременно обеспечивать связь с имплантатом путем передачи на него информации в виде бинарных данных и питать энергией указанный имплантат для работы содержащегося в нем электрического прибора при помощи единственного средства, являющегося источником индукции. Объектом настоящего изобретения является также имплантат, способный одновременно поддерживать связь с устройством управления путем передачи на последнее информации в виде бинарных данных и принимать энергию, необходимую для работы содержащегося в нем электрического прибора.
В этой связи настоящее изобретение относится в полном смысле этого слова к типу, описанному в основном пункте формулы изобретения.
В соответствии с настоящим изобретением осуществляют изменения при наведении электромагнитного поля указанным источником индукции для обеспечения передачи информации в виде бинарных данных в указанный имплантат.
Предпочтительно указанную передачу информации осуществляют при помощи битов и, в случае необходимости, разносят во времени.
Предпочтительно указанную передачу информации осуществляют от устройства к имплантату и наоборот.
Предпочтительно указанная информация содержит поочередно или одновременно:
- серийный номер имплантата;
- идентификационные данные о пациенте;
- дату первого ввода в действие;
- дату последней операции;
- число операций;
- состояние имплантата;
- данные о характере операций;
- подтверждения приема передач;
- подтверждение реализации действия.
Предпочтительно подтверждения приема передач сформированы в виде специальных битов.
Таким образом, настоящее изобретение касается устройства для бесконтактного дистанционного управления имплантатом, содержащим электрический прибор, при этом указанное устройство управления содержит источник индукции, являющийся источником энергии для обеспечения работы указанного электрического прибора, при этом указанное устройство управления дополнительно содержит средства обеспечения изменений при наведении электромагнитного поля указанным источником индукции для передачи информации в виде бинарных данных в указанный имплантат.
Предпочтительно указанные средства обеспечения изменений при наведении электромагнитного поля выполнены в виде инвертора, соединенного с передающей антенной. Предпочтительно указанную антенну соединяют также с приемником, а указанное устройство содержит модуль обнаружения и обработки изменений, внесенных в электромагнитное поле.
Предпочтительно устройство содержит микроконтроллер, соединенный с блоком управления и вывода данных и/или выполненный с возможностью сообщения с компьютером, выполняющим роль интерфейса.
Предпочтительно устройство содержит также квантующий понижающий трансформатор напряжения для оптимизации амплитуды электромагнитного поля.
Настоящее изобретение касается также имплантата, в частности устройства для стимуляции сокращения желудка, выполненного с возможностью бесконтактного дистанционного управления при помощи устройства управления в соответствии с настоящим изобретением.
Предпочтительно указанный имплантат содержит средства обеспечения внесения изменений в указанное электромагнитное поле для передачи информации в виде бинарных данных в указанное устройство управления.
Предпочтительно указанные средства обеспечения внесения изменений в указанное электромагнитное поле выполнены в виде модуля связи.
Предпочтительно указанная информация, передаваемая имплантатом, содержит поочередно или одновременно:
- серийный номер имплантата;
- идентификационные данные о пациенте;
- дату первого ввода в действие;
- дату последней операции;
- число операций;
- состояние имплантата;
- данные о характере операций;
- подтверждения приема передач;
- подтверждение реализации действия.
Предпочтительно подтверждения приема передач сформированы в виде специальных битов.
Предпочтительно имплантат содержит микроконтроллер, соединенный с указанными средствами обеспечения внесения изменений в указанное электромагнитное поле.
Предпочтительно указанный электрический прибор выполнен в виде двигателя без щеток с датчиком(ами) положения ротора.
Настоящее изобретение будет более очевидно из нижеследующего описания, приведенного исключительно в качестве пояснения примера варианта выполнения, со ссылками на прилагаемые фигуры, на которых:
фиг.1 - принципиальная схема устройства бесконтактного дистанционного управления имплантатом и имплантата, управляемого при помощи устройства управления в соответствии с настоящим изобретением;
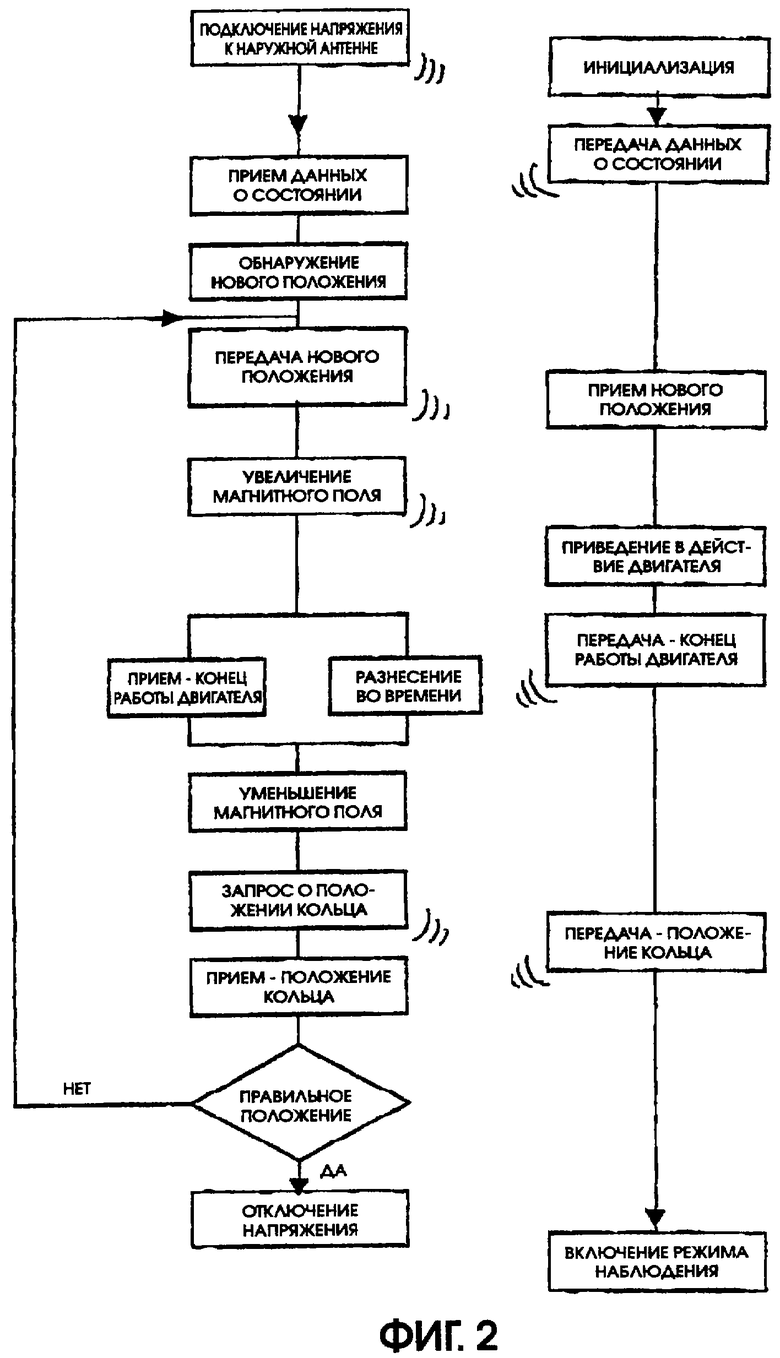
фиг.2 - упрощенная блок-схема работы комплекса устройство/имплантат.
Способ бесконтактного дистанционного управления в соответствии с настоящим изобретением является способом управления имплантатом (20), содержащим электрический прибор (21), при помощи устройства управления (10), при этом указанное устройство управления (10) содержит источник индукции (11), являющийся источником энергии для обеспечения работы указанного электрического прибора (21).
Способ в соответствии с настоящим изобретением отличается тем, что осуществляют изменения при наведении электромагнитного поля указанным источником индукции (11) для обеспечения передачи информации в виде бинарных данных в указанный имплантат (20).
Способ осуществляют после установки имплантата в тело. Поэтому его осуществление доверяют квалифицированным специалистам, хотя оно и не требует хирургического вмешательства.
Передачу информации осуществляют при помощи битов, в случае необходимости, разнесенных во времени, при этом указанные биты могут образовывать слова, например, в виде байтов.
Устройство управления (10) содержит средства обеспечения внесения изменений при наведении электромагнитного поля указанным источником индукции (11) для передачи информации в виде бинарных данных в указанный имплантат (20).
Устройство управления (10) в соответствии с настоящим изобретением разработано для управления имплантатом (20), выполненным в виде кольца, стимулирующего сокращение желудка, вместе с тем оно может быть адаптировано для любого типа имплантата, в котором используется электрический прибор.
Показанное на фиг.1 настоящее изобретение основано на двух элементах: с одной стороны, это приемопередающий инвертор и, с другой стороны, - имплантированный радиоответчик.
Приемопередающий инвертор: это система, обеспечивающая энергией желудочный имплантат, управляющая связью и выполняющая роль интерфейса между человеком и машиной. Она может состоять из одной или нескольких частей.
- Блок питания (19): обеспечивает изоляцию силовой линии, содержит корректор коэффициента мощности (PFC), обеспечивает мощность, необходимую для работы понижающего трансформатора (15) и инвертора (12), а также управляющие напряжения;
- Квантующий понижающий трансформатор напряжения (15): позволяет модулировать напряженность электромагнитного поля в зависимости от необходимости;
- Инвертор с полной мостовой цепью (12): этот компонент необходим для управления напряжением, прикладываемым к резонансному контуру. Он выдает линейное напряжение. Модуляцией амплитуды управляет только понижающий трансформатор (15). Это позволяет ограничить частоту коммутаций электрических переключателей.
- Наружная антенна (18): в данном случае это катушка, генерирующая электромагнитное поле, необходимое для работы имплантата. Она также принимает сигналы, исходящие от имплантата (20). Она соединена с конденсатором и резистором, образуя резонансный контур.
- Модуль (16) обнаружения и обработки сигнала связи: этот модуль обеспечивает получение данных на основе слабого изменения напряжения на контактах наружной антенны и/или фазового смещения тока.
- Генератор колебаний (17): генерирует командные сигналы инвертора с полной мостовой цепью (12). Эти сигналы регулируются по очень точному хронометрическому устройству.
- Микроконтроллер (13): управляет всеми системами. В частности, он управляет связью, амплитудой электромагнитного поля и интерфейсом человек/машина.
- Блок (14) управления и вывода данных и/или связи с персональным компьютером: на дисплей выводятся все данные, передаваемые имплантатом. Информация, в частности фамилия пациента, вводится при помощи клавиатуры, типа используемой в персональных компьютерах. Последовательное соединение обеспечивает связь с персональным компьютером, например, для технического обслуживания устройства.
Имплантат-радиоответчик (20):
- Внутренняя антенна (24): благодаря этой катушке имплантат получает питание и имеет связь с внешним устройством. Она соединена с конденсатором и образует резонансный контур, настроенный на ту же частоту, что и инвертор.
- Генератор напряжения (22): генерирует напряжение, используя энергию, получаемую при помощи антенны (24).
- Модуль (25) связи: связь основана на принципе радиоответчика. Изменение напряжения на контактах внутренней антенны приводит к слабому изменению амплитуды напряжения на контактах наружной антенны, а также к изменению смещения фаз тока в наружном резонансном контуре. Для передачи данных инвертор на короткое время прерывает индукцию. Этот перерыв обнаруживается микроконтроллером (23) имплантата (20).
- Модуль (26) регулирования: ограничивает напряжение на контактах микроконтроллера.
- Аккумулятор (27): обеспечивает питание микроконтроллера (23) во время определенных фаз связи.
- Микроконтроллер (23): это единственный сложный компонент имплантата. Он управляет всей связью и непосредственно электрическим прибором (21) и контролирует амплитуду сокращений желудка.
- Электрический прибор (21): например, микродвигатель типа "DC Brushless", без щеток, оснащен датчиком(ами) положения ротора. Этот двигатель, практически не подверженный износу, по своей конструкции позволяет контролировать число осуществляемых им оборотов.
- Кольцо для стимуляции сокращения желудка (28): оно приводится в действие микродвигателем при помощи передачи винт/гайка.
Питание имплантата (20) осуществляется путем индукции. Индукция имеет фиксированную частоту, например, равную 115,2 кГц. Все волны имеют форму синусоиды.
Имплантат (20) содержит микроконтроллер (23), который, с одной стороны, управляет электрическим прибором (21), являющимся микродвигателем, и, с другой стороны, обеспечивает связь с устройством управления (10) и запоминание данных.
Связь имплантата (20) с внешним устройством осуществляется путем изменения напряжения на контактах его антенны (24). Это изменение приводит к изменению напряжения, прикладываемого к наружной антенне (18), и к смещению фаз тока. Продолжительность этих изменений соответственно контролируется, и сигнал обрабатывается микроконтроллером (13) инвертора.
Для обеспечения связи в направлении от внешнего устройства к имплантату (20) осуществляют прерывание электромагнитного поля. В это время питание имплантата осуществляется от аккумулятора (27), и производится измерение продолжительности прерывания для получения данных.
При связи от имплантата к внешнему устройству продолжительность изменений составляет, например, 500 мс для логического 0, 1 мс для логической 1 и 2 мс для подтверждения приема. Каждые 2 мс передается один бит.
При связи от внешнего устройства к имплантату продолжительность изменений составляет, например, 750 мкс для логического 0, 1,5 мс для логической 1 и 3 мс для подтверждения приема. Каждый 3 мс передается один бит.
Передаваемые имплантатом (20) данные имеют, например, следующий формат:
- серийный номер имплантата закодирован на 4 байтах;
- данные о пациенте закодированы на 30 байтах;
- дата первого ввода в действие закодирована на 6 байтах;
- дата последней операции закодирована на 6 байтах;
- справка о предшествующих положениях на 4 байтах, то есть 8 положений
(положение кольца закодировано на 3 битах, что дает два положения на байт);
- число операций закодировано на 1 байте.
Передаваемые на имплантат (20) данные имеют следующий формат.
В режиме программирования:
- пароль доступа закодирован на 1 байте;
- идентификационные данные об имплантате закодированы на 4 байтах;
- данные о пациенте закодированы на 30 байтах;
- дата первого ввода в действие на 6 байтах.
В нормальном режиме:
- идентификационные данные об имплантате закодированы на 4 байтах;
- последующее новое положение закодировано на 1 байте;
- только после подтвержденного перемещения: дата на 6 байтах.
Для обеспечения безопасности процесса, в частности в случае перебоя связи с имплантатом, можно отправить последовательный номер "универсальный ключ", который позволяет управлять кольцом.
Как в одном, так и в другом направлении связи каждому байту информации непосредственно предшествует его адрес на 1 байте и после каждого байта информации непосредственно передается 4 байта, соответствующих контрольной сумме переданного слова. Если ошибка не обнаружена, приемник передает подтверждение приема. В этом случае передатчик отправляет следующий блок информации. Если передатчик не получает подтверждения приема, он возобновляет передачу той же информации и может при этом произвести до десяти попыток.
Такой исключительно оригинальный тип связи позволяет избежать любой возможной ошибки в интерпретации или "несанкционированного доступа" для сигнала от другой индуктивной системы, работающей на той же частоте.
Амплитуда электромагнитного поля постоянно модулируется в зависимости от потребностей имплантата для того, чтобы ограничивать мощность самым необходимым минимумом.
Внутренняя антенна (24) встроена в имплантат (20). Антенну располагают таким образом, чтобы ее ось была максимально приближена к перпендикуляру относительно кожи.
Для лучшего понимания настоящего изобретения необходимо отметить, что под "физическим соединением" подразумевается материальное соединение, например провод.
Таким образом, между имплантатом (20) и устройством управления (10) не существует никакой электропроводной связи.
Для приведения в действие имплантата наружную антенну (18) прикладывают к коже пациента. При подключении напряжения амплитуда поля оптимизируется для установления связи с имплантатом. После различных контрольных операций имплантат передает всю информацию. Сразу же после корректного приема этой информации она выводится на дисплей блока управления и вывода данных (14) устройства управления (10). После этого в зависимости от необходимости оператор может выбрать для задания новое положение. После получения подтверждения эти данные отправляются в имплантат (20). Затем поле увеличивается для передачи на микродвигатель необходимой мощности. В конце перемещения соответствующая информация направляется на устройство (10) управления, и поле опять принимает свое нормальное значение. Устройство (10) управления направляет в имплантат запрос о корректном перемещении и выводит соответствующее подтверждение для оператора.
На фиг.2 показана блок-схема всего комплекса.
Вышеизложенное описание настоящего изобретения приведено в качестве примера. Разумеется, что специалист может реализовать различные варианты настоящего изобретения, не выходя за рамки патента.
Изобретение относится к медицинской технике, а именно касается бесконтактного дистанционного управления устройством для стимуляции сокращений желудка. Устройство бесконтактного управления устройством для стимуляции сокращений желудка содержит электрический прибор, источник индукции, являющийся источником энергии для работы электрического прибора, и средство обеспечения прерываний в наведении электромагнитного поля источником индукции для передачи информации в виде бинарных данных в устройство для стимуляции сокращений желудка. Применение устройства бесконтактного управления устройством для стимуляции сокращений желудка, содержащего источник индукции и средство обеспечения прерываний в наведении электромагнитного поля источником индукции для управления устройством для стимуляции сокращений желудка, заключается в передаче информации в виде бинарных данных устройству для стимуляции сокращений желудка, при этом при прерывании электромагнитного поля производится измерение продолжительности прерывания для получения данных. Комплекс состоит из устройства бесконтактного управления устройством для стимуляции сокращений желудка и устройства для стимуляции сокращений желудка. Использование изобретения позволяет повысить эффективность дистанционного управления при проведении процедуры стимуляции сокращений желудка. 3 н. и 26 з.п. ф-лы, 2 ил.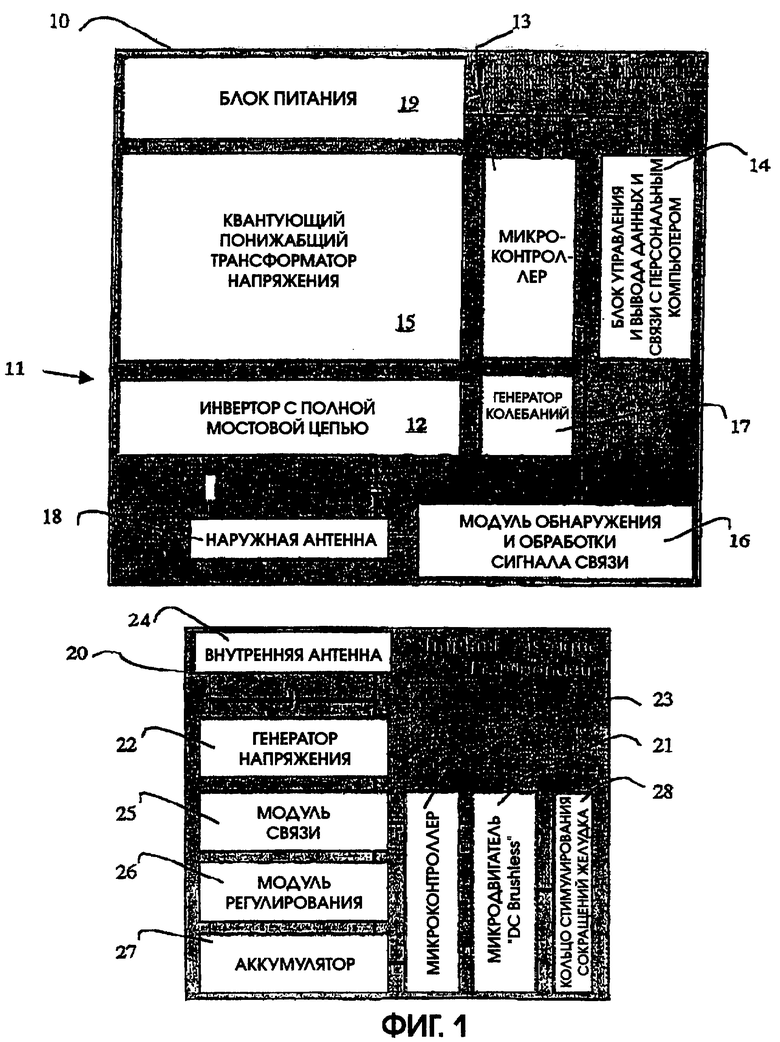
серийный номер имплантата,
идентификационные данные о пациенте,
дату последнего ввода в действие,
число операций,
состояние имплантата,
данные о характере операций,
подтверждение приема передач,
подтверждение реализации действия.
серийный номер имплантата,
идентификационные данные о пациенте,
дату последнего ввода в действие,
число операций,
состояние имплантата,
данные о характере операций,
подтверждение приема передач,
подтверждение реализации действия.
серийный номер имплантата;
идентификационные данные о пациенте;
дату первого ввода в действие;
дату последней операции;
число операций;
состояние имплантата;
данные о характере предыдущих операций;
подтверждения приема передач;
подтверждение реализации действия.
серийный номер имплантата;
идентификационные данные о пациенте;
дату первого ввода в действие;
дату последней операции;
число операций;
состояние имплантата;
данные о характере предыдущих операций;
подтверждения приема передач;
подтверждение реализации действия.
| WO 00/15158 A1, 22.08.2000 | |||
| WO 00/30354 A1, 02.06.2000 | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| ЭЛЕКТРОСТИМУЛЯТОР ЖЕЛУДОЧНО-КИШЕЧНОГО ТРАКТА | 1993 |
|
RU2111771C1 |
| Радиочастотный электростимулятор | 1990 |
|
SU1706642A1 |

