Изобретение относится к области измерительной техники, точнее, к области радиолокации малой дальности и может быть использовано в медицине, например, для бесконтактного контроля поведения имплантатов в опорно-двигательных суставах человека с другими частями тела в динамике, т.е. в движении.
Общей проблемой при введении имплантатов является контроль их положения (правильность и достаточность). В настоящее время контроль производится только в статике (рентген, томография, УЗИ), но это явно недостаточно, т.к. вроде бы и правильно введен имплантат, но в процессе заживления и затем движения могут появиться дискомфортные явления: болевые ощущения, неправильность движения (раскоординированность) и пр., а в чем именно выразилась неправильная установка имплантата непонятно, поэтому требуются дополнительные исследования.
Благодаря развитию вычислительных средств стало возможным применение методов радиоволновой томографии, как средств дистанционного неразрушающего контроля и диагностики внутренней структуры полупрозрачных для радиоизлучения средств и восстановления формы непрозрачных объектов. Задача радиовидения заключается в пересчете данных, полученных на основе разностороннего сканирования исследуемых объектов.
Проблемой создания подобных устройств является уменьшение габаритно-массовых характеристик, повышения разрешающей способности, снижение себестоимости, исключение вредного физического воздействия на человека, а главное - возможность получения однозначного результата положения имплантата.
Известен прибор «Ручной сканер И-СКАН4М», который относится к досмотровому оборудованию и в режиме реального времени позволяет дистанционно распознавать на теле человека и внутри его различные предметы и вещества, в том числе имплантаты, см. E-mail: info@iscansystems.ru
Недостаток: это ручной конструктив, значит, эффективность досмотра зависит от умения и навыков оператора, следовательно, последний может ошибаться в процессе работы, особенно в конце смены, также при плохом самочувствие и прочих субъективных факторах, например, при естественном или умышленном отвлечении от работы.
Известна американская система US 7.683.822 от 2007 г. (опубликован в 2010 г.), класс США 342/22 «Method and system for Remotely Detecting Metall Items, в которой сканируют электромагнитным излучением контролируемое пространство, в котором могут находиться металлические или из другого материала предметы, при этом осуществляют следующие действия:
- в качестве электромагнитного излучения используют непрерывный частотно-модулированный сверхвысокочастотный сигнал;
- в процессе запоминают отраженные сигналы по амплитуде для всех направлений излучения;
- по определенному алгоритму строят в процессоре ПК цифровое изображение и по нему судят по положению имплантата.
Эта система имеет следующие недостатки:
- недостаточная разрешающая способность;
- высокий уровень шумов;
- высокая стоимость (до 100000$).
Известна технология «Smart Radar», по которой в заданном диапазоне частот последовательно излучаются импульсы, отражаясь от распознаваемого объекта они принимаются, анализируются как изменение амплитуды и фазы принимаемого сигнала по отношению к исходному. На основании этих параметров определяются физические свойства объекта, такие как положение имплантата относительно близлежащих органов, а также определяется расстояние до объекта, см. http://www.iscansysteams.ru/t_advantages.html.
Недостатки: сложное и достаточно спорное техническое решение, также высокая стоимость, до 50000$.
Известен «Радар малой дальности» фирмы ООО «РадиоВижн», Россия, см. www.radio-vision.ru. Принцип работы этого радара заключается в сканировании пространства узконаправленным непрерывным линейным частотно-модулированным сигналом. Радар сканирует пространство электромагнитной волной одновременно в вертикальной и горизонтальной плоскостях, формируя сканирующий луч и примерную диаграмму направленности при помощи фазированной антенной решетки (ФАР), передающей и приемной. Результат отображается на мониторе в 3D/2D виде с частотой до 15 кадров в секунду.
При всех своих достоинствах этого радара он имеет следующие недостатки:
- низкая разрешающая способность (40 см.);
- применение передающей и приемной ФАР требует очень тщательной их настройки, тоже относится к регуляторам фаз, что приводит к неоправданному техническому усложнению устройства;
- узкополосный сигнал скорее приведет к снижению помехозащищенности, чем к ее увеличению, как утверждают авторы;
- пациент идет, следовательно, за имплантатом надо следить, в результате непрерывно изменяются угловые координаты имплантата, что снижает точность его определения.
Наиболее близким техническим решением является способ (US 2017078400 А1, 16.03.2017) Д1 определения положения введенного имплантата при движении ([0060, 0295, 0301]), основанный на применении радиолокации малой дальности ([0294-0295]), использующей устройство, включающее сканирующую рамку MIMO ([0491, 0571]), заключающийся в излучении сверхширокополосных сигналов сверхвысокой частоты ([0184-0185], ultra wide band) и широкой диаграммой направленности ([0099, 0314], omnidirectiolal pattern), приеме отраженных от имплантата и окружающих его органов сигналов ([0066, 0078]), обработке информации для формирования изображения в 3D формате с использованием программного алгоритма ([0513-0514, 0578]), получая тем самым объемное изображение имплантата и его положение во времени и пространстве, записи ([0556]) и покадрового анализа изображения ([0368], single frame), при этом анализируется и оценивается поведение имплантата в движении ([0196, 0201]) и определяется правильность его положения (введения) ([0530]). Указанный источник информации будет принят во внимание в случае представления уточненной формулы при оценке заявленного способа на соответствие условию патентоспособности «новизна».
Его электрическая сема построена по принципу классического радиолокатора: имеется она антенна, переключающаяся в режиме передача - прием с электронным сканированием диаграммы направленности.
Это с одной стороны упрощает способ, но с другой имеет существенный недостаток: недостаточная точность измерения координат имплантата по углам азимута и места, следовательно, и точность 3D изображения. Это происходит потому, что антенна радиолокатора расположена на месте, а имплантат движется, т.е. угол азимута и места изменяются от нулевого до определенного, причем они все время разные от начала имплантата о его конца при измерении в одно и то же время, это приводит к систематической ошибке, которая нарастает в процессе движения, т.е. ошибка может быть и не очень большая (до 1-1.5 мм), но с точки зрения правильности введения имплантата недопустимая. Это годится для РЛС обнаружения и слежения, но не для определения положения имплантата. Эта ошибка может быть скорректирована, но это требует больших программных и вычислительных затрат, что очень значительно увеличивает продажную стоимость.
Патент США предназначен, в основном, для автоматизации управления транспортными средствами в соответствии с логикой управления по установленным датчикам - реперам на пути следования. От репера требуется только одно: обнаружен он на пути следования или нет, т.е. по логике управления это лог.«1» или лог.«0».
Также патент может быть использовано в медицине для снятия ЭКГ, ЭЭГ, кровяного давления, причем для этого специальные датчики прикрепляются к коже или имплантируются под нее. В патенте введенный датчик - имплантат сам передает текущую информацию пользователю.
Технической задачей изобретения является повышение точности определения местоположения введенного имплантата относительно окружающих органов.
Технический результат достигается за счет применения трехмерной машинной графики для визуализации трансплантированных органов с однозначным и точным отображением класса ситуации («норма», «аномалия», «критическая»).
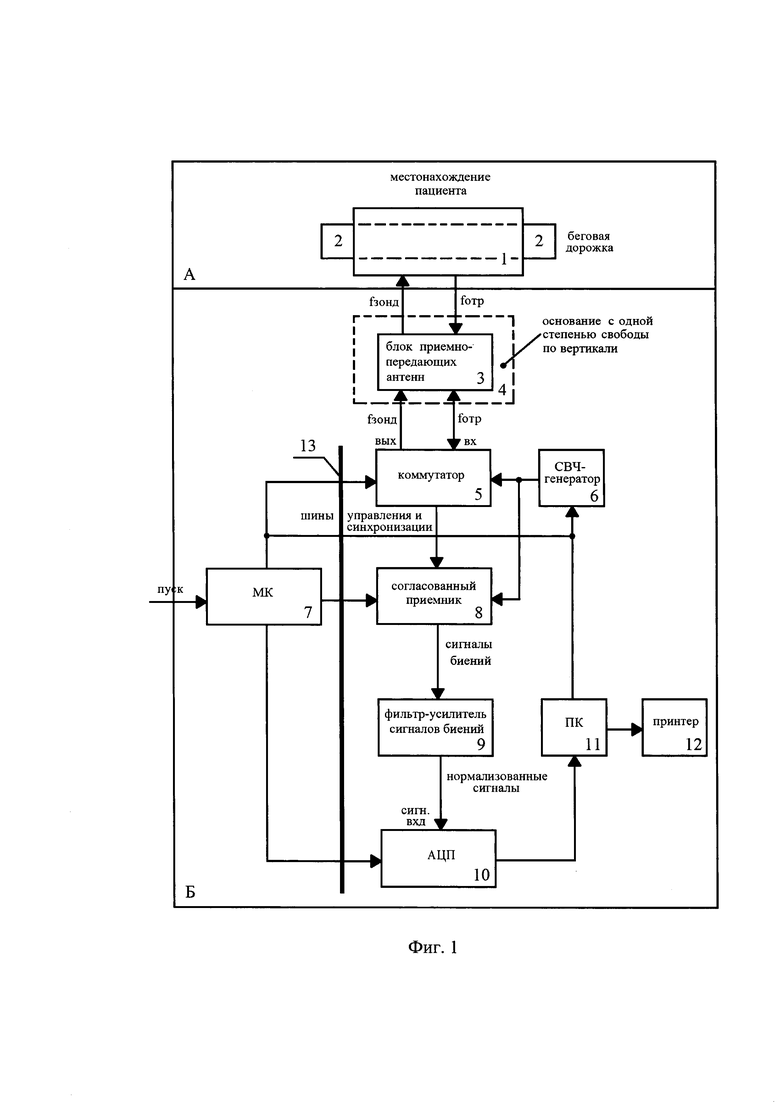
Для решения поставленной задачи предлагается система визуализации введенного имплантата представляет собой совокупность информационно-измерительных и вычислительных средств с требуемым математическим обеспечением для управления и вычисления, характеризующаяся тем, что содержит две основные части: А - исследуемую часть, т.е. пациента с введенным в него имплантатом на базовой дорожке и Б - собственно радиоволновой задающе-вычислительной части, которая содержит блок приемно-передающих антенн на основании, коммутатор, СВЧ-генератор, микроконтроллер - МК, согласованный приемник, фильтр-усилитель сигналов биений, АЦП и персональный компьютер - ПК с принтером, причем обе части имеют следующие соединения: основанная на применении системы MIMO много передатчиков - много приемников, отличающаяся тем, что содержит две основные части А - исследуемую часть, т.е. пациент находится на беговой дорожке и зондирующими fзонд и отраженными fотр частотными сигналами связан с блоком передающих и приемных антенн, который связан с входами/выходами коммутатора, а выход его через согласованный приемник и затем через фильтр-усилитель сигналов биений соединен с сигнальным входом АЦП, выход которого соединен с входом ПК выход последнего соединен с принтером; выход СВЧ-генератора соединен с коммутатором и согласованным приемником; МК шинами управления и синхронизации соединен с коммутатором, согласованным приемником, СВЧ-генератором и АЦП.
На чертеже представлена электрическая структурная схема системы, на которой изображено:
А - исследуемая часть;
Б - задающе-вычислительная часть;
1 - пациент;
2 - беговая дорожка;
3 - блок приемно-передающих антенн на основании 4;
4 - подвижное основание;
5 - коммутатор;
6 - СВЧ-генератор;
7 - микроконтроллер (МК);
8 - согласованный приемник;
9 - фильтр-усилитель сигналов биений;
10 - АЦП;
11 - персональный компьютер (ПК);
12 - принтер;
13 - шины управления и синхронизации.
Схема на фиг. 1 имеет следующие соединения основанная на применении системы MIMO много передатчиков - много приемников, отличающаяся тем, что содержит две основные части А - исследуемую часть, т.е. пациент находится на беговой дорожке и зондирующими fзонд и отраженными fотр частотными сигналами связан с блоком передающих и приемных антенн, который связан с входами/выходами коммутатора, а выход его через согласованный приемник и затем через фильтр-усилитель сигналов биений соединен с сигнальным входом АЦП, выход которого соединен с входом ПК выход последнего соединен с принтером; выход СВЧ-генератора соединен с коммутатором и согласованным приемником; МК шинами управления и синхронизации соединен с коммутатором, согласованным приемником, СВЧ-генератором и АЦП.
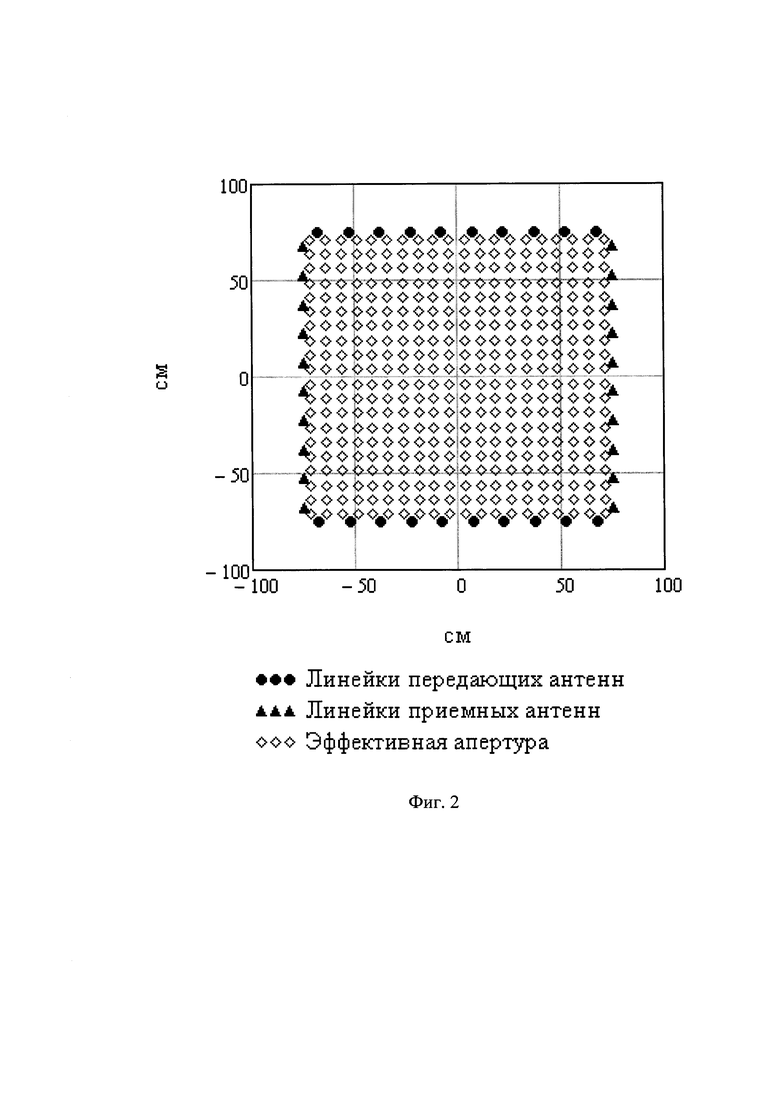
На фиг. 2 показана схема рамки с приемными и передающими антеннами, а также с эффективной апертурой.
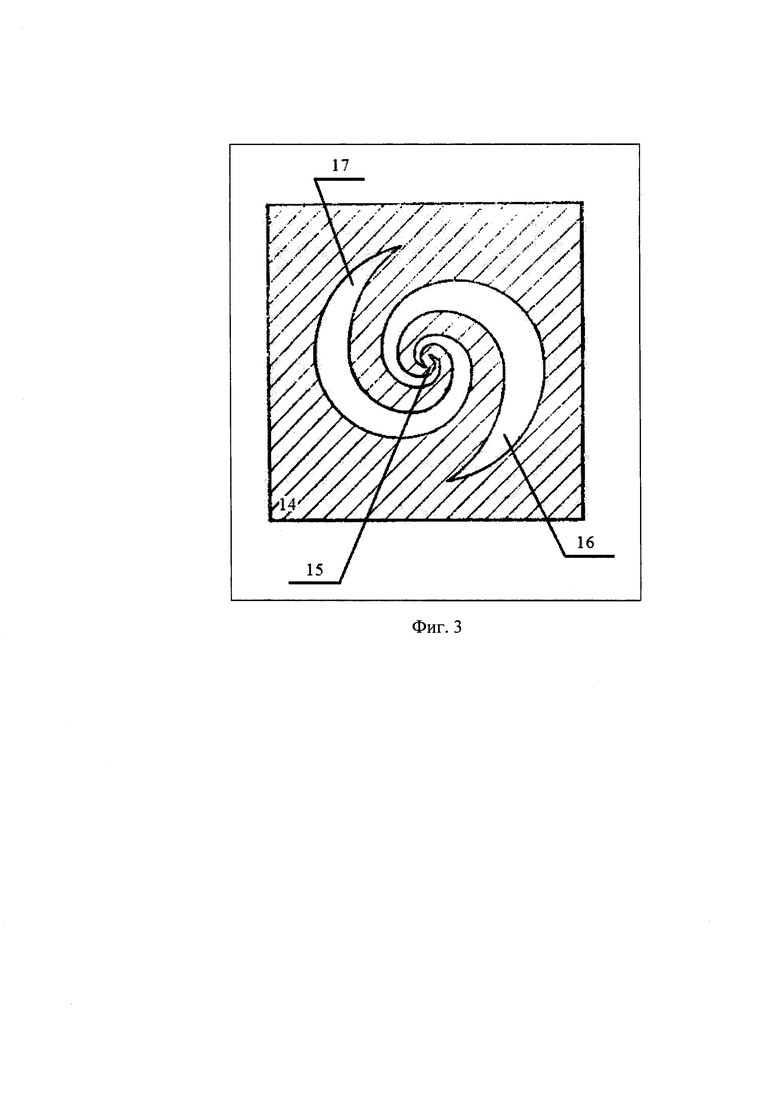
На фиг. 3 показан приемный (передающий) элемент антенной рамки блока 3, на которой изображено:
14 - собственно элемент;
15 - точка возбуждения;
16, 17 - витки двухзаходной логарифмической спирали.
Схема на фиг. 1 работает следующим образом.
По существу предложенная система представляет собой радиолокационный дальномер с непрерывным ЧМ сигналом, и может быть реализован разными способами. Один из возможных вариантов структурной схемы подобного дальномера, позволяющий провести теоретическое рассмотрение и получить соотношения, необходимые для дальнейших разделов монографии, показан на фиг. 4. Генератор зондирующего СВЧ-сигнала возбуждает передающую антенну и одновременно формирует гетеродинный сигнал для смесителя приемного тракта. Отраженный от исследуемого объекта сигнал собирается приемной антенной и воздействует на смеситель. В смесителе происходит взаимодействие гетеродинного (зондирующего) и отраженного сигналов и на его выходе формируется полезный сигнал, частота которого связана с измеряемым расстоянием. Полезный сигнал усиливается и поступает на измеритель частоты и на вычислитель расстояния. Модулятор служит для обеспечения частотной модуляции зондирующего сигнала. При такой структуре радиолокационного измерителя основной измерительной операцией в ЧД является измерение частоты ограниченной выборки непрерывного синусоидального сигнала разностной частоты (СРЧ).
Простота и физическая прозрачность всех этапов обработки полезного сигнала и, на первый взгляд, хорошо исследованные методы измерения частоты обеспечивают высокую надежность счетного метода и нередко исключают необходимость какого-либо дополнительного исследования.
Однако в этой простоте как раз и кроются причины, ограничивающие достижение высокой точности измерения с помощью хорошо известных методов оценки частоты. Поэтому необходимо еще раз внимательно рассмотреть традиционные методы, используемые при формировании и обработке сигналов в частотном дальномере и при анализе его работы. Целью такого рассмотрения является выявление тех факторов, которые не важны при достаточно грубых (традиционных) измерениях, но приобретают существенное значение, когда речь идет о достижении высокой точности. Это и выполняется в предложенной схеме.
Существенное отличие заключается в том приемном множестве передающих и приемных (по 20 шт), так называемая система MIMO, далее антенная решетка находится неподвижно, а эффективная апертура создается не механическим сканированием не фазированной антенной решетки, а квазисканированием, когда в минимальный временной отрезок задействована одна передающая миниантенна и одна принимающая, в следующий отрезок времени задействована другая пара и т.д., т.о. сканируется определенный участок. Далее пациент не идет вдоль антенной решетки, а она не следует за ним в азимутальной плоскости, т.к. пациент «бежит» по беговой дорожке, находясь, все время против антенной решетки, которая по высоте направляется (устанавливается) на высоте контролируемого имплантата. Отсюда следует, что исчезает систематическая ошибка по азимуту с углу места. Сама электрическая схема на фиг. 1 почти полностью соответствует схеме на фиг. 4, отличие в основном добавления коммутатора 5, а роль вычислителя выполняет ПК 11, который позволяет визуализировать поведение введенного имплантата в формате 2D/3D, по программам, которыми оснащен каждый современный ПК (ноутбук), причем визуализация происходит в реальном масштабе времени, с возможностью покадрового просмотра.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХМЕРНАЯ СИСТЕМА ГОЛОГРАФИЧЕСКОГО РАДИОВИДЕНИЯ ДЛЯ ДОСМОТРА | 2017 |
|
RU2652530C1 |
| СИСТЕМА РАДИОЛОКАЦИОННОГО БЕСКОНТАКТНОГО КОНТРОЛЯ БЕТОННЫХ И ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ | 2022 |
|
RU2801787C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА ПО ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2747818C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2828006C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2824842C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2021 |
|
RU2778364C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| БЕСКОНТАКТНЫЙ ИМПУЛЬСНО-ФАЗОВЫЙ СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ РАЗДЕЛА РАЗНОРОДНЫХ ЖИДКОСТЕЙ, А ТАКЖЕ ОТНОСИТЕЛЬНОГО ИЗМЕНЕНИЯ УРОВНЯ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ | 1998 |
|
RU2152595C1 |

Изобретение относится к медицинской технике, точнее к области радиолокации малой дальности, и может быть использовано в медицине, например, для бесконтактного контроля поведения имплантатов в опорно-двигательных суставах человека с другими частями тела в динамике, т.е. в движении. Технической задачей изобретения является повышение точности определения местоположения введенного имплантата относительно окружающих органов. Технический результат достигается за счет применения трехмерной машинной графики для визуализации трансплантированных органов с однозначным и точным отображением класса ситуации («норма», «аномалия», «критическая»). 1 з.п. ф-лы, 4 ил.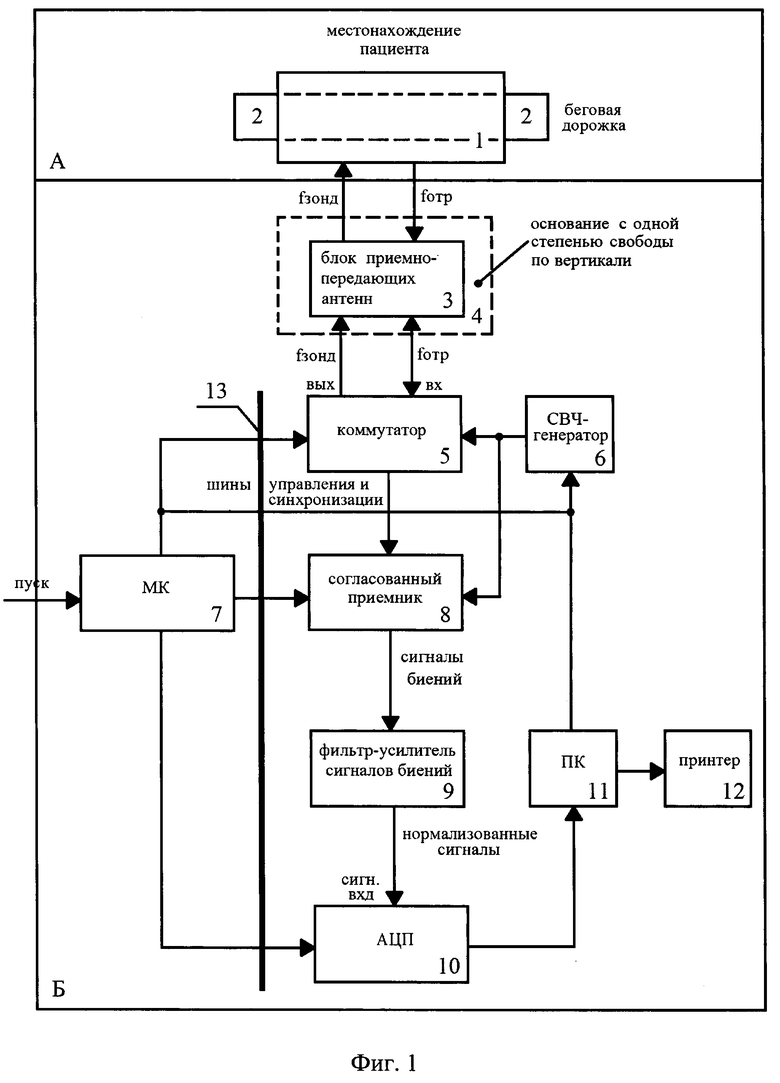
1. Система визуализации введенного имплантата, представляющая собой совокупность информационно-измерительных и вычислительных средств с требуемым математическим обеспечением для управления и вычисления, содержащая две основные части: А - исследуемую часть с пациентом на базовой дорожке с введенным в него имплантатом и Б - радиоволновую задающе-вычислительную часть, которая содержит блок приемно-передающих антенн на основании, коммутатор, СВЧ-генератор, микроконтроллер - МК, согласованный приемник, фильтр-усилитель сигналов биений, АЦП и персональный компьютер - ПК с принтером, причем обе части имеют следующие соединения: основанная на применении системы MIMO много передатчиков - много приемников, отличающаяся тем, что пациент находится на беговой дорожке и зондирующими fзонд и отраженными foтр частотными сигналами связан с блоком передающих и приемных антенн, который связан с входами/выходами коммутатора, а выход его через согласованный приемник и затем через фильтр-усилитель сигналов биений соединен с сигнальным входом АЦП, выход которого соединен с входом ПК, выход последнего соединен с принтером; выход СВЧ-генератора соединен с коммутатором и согласованным приемником; МК шинами управления и синхронизации соединен с коммутатором, согласованным приемником, СВЧ-генератором и АЦП.
2. Система по п. 1, включающая в себя основание, на котором расположен блок приемно-передающих антенн, причем основание имеет одну степень свободы в вертикальной плоскости.
| US 2017078400 A1, 16.03.2017 | |||
| Автоматическое создание ориентированной на показатели продольной области для просмотра показателей пациента | 2014 |
|
RU2686627C1 |
| ДИСТАНЦИОННЫЙ МОНИТОРИНГ И РЕГУЛИРОВКА УСТРОЙСТВА ОГРАНИЧЕНИЯ ПОТРЕБЛЕНИЯ ПИЩИ | 2006 |
|
RU2456918C2 |

