Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству и способу для управления обратной скоростью в системе мобильной связи, и более конкретно к устройству и способу ограничения скорости мобильной станции, которой предоставляется автономное управление скоростью.
Уровень техники
В обычных системах мобильной связи обратная передача данных с мобильной станции (МС) (MS) на базовую приемопередающую станцию (БПС) (BTS) может выполняться по каналам пакетных данных в блоке пакетов физического уровня. Скорость данных каждого пакета физического уровня может изменяться в зависимости от пакетов, и БПС управляет скоростью передачи данных каждого пакета физического уровня. То есть БПС управляет скоростями передачи данных различных МС. Такая процедура, в которой БПС определяет и управляет скоростями передачи данных МС, называется "планирование". БПС ведет планирование на основе информации обратной связи, передаваемой на нее с МС, на основании информации, относящейся к мощности МС и количеству данных, подлежащих передаче от МС. То есть планировщик БПС ведет планирование, принимая во внимание нагрузку, получаемую от "повышения температуры (ПТ) (RoT)" или "отношения сигнала к шуму (С/Ш) (SNR)" МС, расположенных в зоне обслуживания БПС.
Схема управления БПС для обратных скоростей передачи данных МС главным образом классифицируется на схему быстрого планирования и схему управления скоростью (УС) (RC).
МС, работающая со схемой быстрого планирования, передает на БПС сообщение запроса скорости, включающее в себя нынешнее состояние буфера и информацию о доступной мощности МС. При приеме сообщения запроса скорости с МС БПС передает информацию предоставления скорости к МС, принимая во внимание тепловой шум, ПТ МС и другую релевантную информацию, чтобы разрешить МС передавать данные с максимальной скоростью.
В режиме быстрого планирования МС может передавать на БПС сообщение запроса скорости, включающее в себя нынешнее состояние буфера и информацию о доступной мощности МС, а БПС может выделить конкретную скорость для МС через информацию сообщения предоставления, принимая во внимание запрос МС и состояние загрузки соты.
Схема УС БПС классифицируется на схему УНС (DRC) (управления назначением скорости) и схему ОУС (CRC) (общее управление скоростью) в зависимости от схем передачи информации управления. БПС, управляющая МС с помощью схемы УНС, может передавать информацию управления назначением скорости на каждую МС, расположенную в зоне обслуживания БПС, а БПС, управляющая МС с помощью схемы ОУС, может передавать информацию управления общей скоростью на каждую МС, расположенную в зоне обслуживания БПС.
То есть БПС, приспособленная к управлению МС с помощью схемы УНС, передает информацию управления назначением на каждую МС, расположенную в соте, таким образом БПС может тонко управлять скоростью МС, сравнивая ее со скоростью БПС с помощью схемы ОУС, при этом все МС, обрабатываемые в зоне обслуживания БПС, управляются вместе. Однако в схеме УНС требуется, чтобы передавалось большее количество информации управления, чем в схеме ОУС.
БПС, способная к управлению МС со схемой ОУС, передает информацию управления, уведомляющую расположенные в соте МС о состоянии "Занято" обратной передачи, если ПТ, измеренное БПС, превышает заранее заданное предельное значение, или передает информацию управления, уведомляющую МС о состоянии "Не занято" обратной передачи, если ПТ ниже, чем заранее заданное предельное значение. Если информация управления, представляющая состояние "Занято", принимается в МС с БПС, МС снижает ПТ соты посредством снижения скорости данных МС или отношения трафика к пилотному сигналу (ОТПС) (TPR), которое будет описано позже. В дополнение, если управляющая информация, представляющая состояние "Не занято", принимается в МС с БПС, МС может увеличивать скорость передачи данных МС или ОТПС. Таким образом, информация, относящаяся к состоянию "Занято" и состоянию "Не занято", может передаваться на МС через бит управления скорости (БУС) (RCB), имеющий размер в один бит.
Схема УНС БПС классифицируется на схему полной перемены скоростей и схему ограниченной перемены скоростей в соответствии со степенью перемены обратной скорости передачи данных МС.
В соответствии со схемой полной перемены скоростей БПС управляет обратной скоростью передачи данных МС без ограничения диапазона переноса скоростей передачи данных. В противоположность этому, в соответствии со схемой ограниченной перемены скоростей БПС управляет обратной скоростью передачи данных МС при ограничении диапазона переноса скорости передачи данных за один шаг.
Например, если набор скоростей передачи данных включает в себя 9,6 КБт, 19,2 КБт, 38,4 КБт, 76,8 КБт, 153,6 КБт и 307,2 КБт, то число и конкретное значение скоростей данных, включенных в набор скоростей передачи данных, могут изменяться в зависимости от систем. В соответствии со схемой полной перемены скоростей, одна из скоростей передачи данных, включенных в набор скоростей передачи данных, может быть определена в качестве скорости передачи данных следующего пакета МС посредством БПС. То есть, в соответствии со схемой полной перемены скоростей МС, передающая данные со скоростью 9,6 КБт, может передавать следующий пакет со скоростью данных 307,2 КБт за раз, т.к. БПС позволяет МС передавать данные с заранее заданной обратной скоростью независимо от скорости передачи данных МС.
В противоположность этому, в соответствии со схемой ограниченной перемены скоростей БПС может определять скорость передачи данных следующего пакета МС при преобразовании с повышением или с понижением скорости передачи данных из предыдущей скорости данных МС за один шаг. Например, МС, передающая со скоростью данных 76,8 КБт, может передавать следующий пакет со скоростью данных только 38,4 КБт, 76,8 КБт или 153,6 КБт. Другими словами, если скорость данных МС преобразуется с повышением или с понижением из скорости данных 76,8 КБт за один шаг, то ограничивается диапазон перемены скоростей данных МС. Команды, используемые для преобразования с повышением или преобразования с понижением и удерживающие скорость данных МС, могут быть представлены как "Вверх", "Вниз" и "Сдерживать". В дополнение, может выполняться сигнал, соответствующий "+1", "-1" и "0".
Каждая из схемы полной перемены скоростей и схемы ограниченной перемены скоростей имеет преимущества и недостатки.
Схема полной перемены скоростей имеет преимущество в том, что БПС может определять скорость передачи данных МС без ограничений. Однако схема полной перемены скоростей имеет недостаток в том, что она требует большое количество битов для того, чтобы передать результаты планирования на МС. Например, если существует шесть скоростей передачи данных, как описано выше, необходимо 3 бита для представления всех скоростей передачи данных. В дополнение, поскольку необходимо передавать информацию об идентификаторах МС, должно быть передано большое количество информации. В противоположность этому, схема полного Предоставления скоростей имеет недостаток в том, что количество помех, оказывающих влияние на другие соты, может значительно изменяться в зависимости от скорости передачи данных МС, так что могут случаться серьезные канальные изменения МС, расположенных в других сотах, портящие систему. В дополнение, схема ограниченной перемены скоростей имеет недостаток в том, что БПС должна определять скорость передачи данных МС в ограниченном диапазоне. В противоположность этому, схема ограниченной перемены скоростей может разрешать БПС передавать результаты планирования на МС с помощью одного бита, так что ее издержки снизятся. В дополнение, схема ограниченной перемены скоростей ограничивает Предоставлен диапазон перемены скоростей передачи данных МС в одном шаге, тем самым относительно уменьшая изменение помех, оказывающих влияние на другие соты.
БПС может устанавливать максимальную автономную скорость и возможность максимальной автономной скорости в отношении конкретного обслуживания для МС для уменьшения задержки, создаваемой во время процедуры управления скоростью передачи данных. То есть если генерируются данные обслуживания, которые могут быть переданы автономно, МС может передавать эти данные, выбирая заранее заданную скорость передачи данных в диапазоне максимальной автономной скорости, выделенной для этого, тем самым возможно минимизировать задержку. Однако трудно предсказывать момент времени для данных обслуживания, которые могут передаваться автономно. По этой причине БПС должна резервировать ресурсы, соответствующие сумме автономных скоростей передачи данных, выделенных для МС.
Тем временем, кроме выше указанной системы, в которой БПС управляет скоростью данных МС, может обеспечиваться система, включающая в себя БПС, способную к управлению ОТПС МС.
В традиционных системах мобильной связи обратная передача данных МС управляется по мощности посредством БПС. В соответствии с процедурой управления по мощности для МС, МС принимает команды управления мощностью с БПС, чтобы прямо управлять мощностью пилотного канала, в то же время управляя каналами иными, нежели пилотный канал, с помощью фиксированного значения ОТПС. Например, если ОТПС равен 3 дБ, то отношение мощности канала трафика, передаваемого с МС, к мощности пилотного канала равно 2:1. Соответственно, когда МС определяет усиление мощности канала трафика, МС устанавливает мощность канала трафика как удвоенную мощность пилотного канала. Такая процедура также доступна для других каналов. То есть усиление соответствующего канала устанавливается с фиксированным значением по отношению к усилению пилотного канала. В системе, в которой БПС управляет ОТПС вместо управления скоростью данных МС, БПС планирует обратную передачу на различные МС, непосредственно сообщая МС результат планирования через скорость передачи данных для управления МС. То есть БПС указывает каждой МС ОТПС, выделенное для нее. ОТПС может увеличиваться по мере увеличения скорости передачи данных. Например, поскольку увеличение скорости передачи данных вдвое заставляет мощность, выделенную мобильной станцией для канала потоков, удваиваться, это увеличение скорости данных также указывает, что ОТПС удваивается. В традиционных системах мобильной связи скорость передачи данных обратного канала трафика по отношению к ОТПС предварительно устанавливается в таблице, так что БПС и МС могут распознавать соотношение между скоростью передачи данных обратного канала трафика и ОТПС. Таким образом, управление скоростью передачи данных МС по существу идентично управлению ОТПС МС. В последующем описании будет описываться только процедура управления скоростью данных МС посредством средства БПС с целью удобства объяснения. Однако, как упомянуто выше, отмечается, что схема управления настоящего изобретения также применима, когда БПС управляет ОТПС вместо управления скоростью данных МС.
Традиционная МС, используемая для автономной передачи, может передавать обратные данные с различными скоростями в ОТПС, выделенном для максимальной автономной скорости. БПС передает сообщение предоставления (далее упоминаемое как "Предоставление", т.е. управление обратной скоростью) на МС, чтобы позволить МС передавать данные с заранее заданной скоростью передачи данных ниже, чем максимальная автономная скорость, тем самым ограничивая максимальную автономную скорость МС. В соответствии с предшествующим уровнем техники при приеме Предоставления с БПС, МС передает данные с заранее заданной скоростью передачи данных в момент передачи данных, соответствующий Предоставлению, при передаче следующих данных с помощью ресурсов, соответствующих максимальной автономной скорости. В дополнение, если максимальная автономная скорость может изменяться только через сообщение сигнализации, необходимо относительно долгое время, соответствующее сотням микросекунд, для выделения новой максимальной автономной скорости.
В действительной среде обратной передачи данных БПС может в достаточной степени выделять максимальную автономную скорость для множества МС. В этом состоянии, если данные обслуживания, имеющие высокий приоритет, генерируются вновь, сумма максимальных автономных скоростей настолько большая, что может быть недостаточно ресурсов, выделенных для новых данных обслуживания. В этом случае максимальная автономная скорость каждой МС должна быть снижена для выделения ресурсов для новых данных обслуживания. Нынешние технологии требуют много времени для регулирования максимальной автономной скорости, следовательно может происходить дополнительная задержка передачи при выделении ресурсов для новых данных обслуживания, вследствие чего качество обслуживания ухудшается. В дополнение, при ограничении максимальной обратной автономной скорости с помощью Предоставления, это Предоставление должно непрерывно передаваться на МС, пока передается обслуживание, имеющее более высокий приоритет. Таким образом, предоставленные каналы становятся загруженными и Предоставление не может передаваться на МС, принимающие те же каналы. Для решения упомянутых выше проблем высокая автономная скорость может выделяться для обслуживания или пользователей, имеющих высокий приоритет. Однако в этом случае ресурсы, используемые для обратной передачи данных, могут быть растрачены в течение интервала, в котором не генерируются новые сервисные данные.
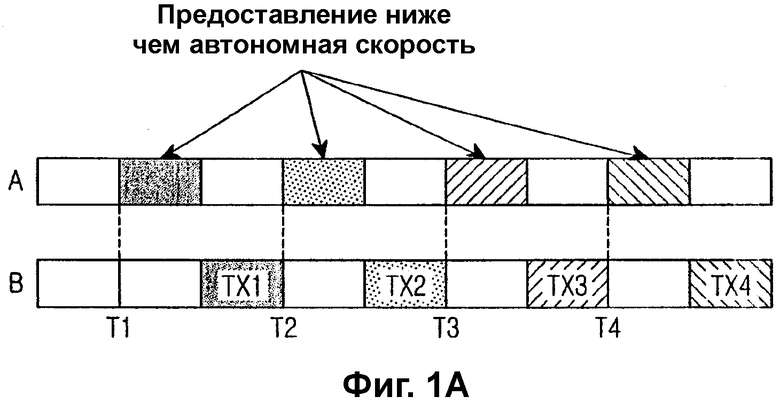
Фиг.1А является блок-схемой, показывающей традиционный способ управления обратной скоростью, в которой:
"А" является прямым управляющим каналом для передачи Предоставления с БПС, а "В" является обратным каналом пакетных данных для передачи данных на БПС. Предоставление является информацией, относящейся к скорости данных ниже, чем максимальная обратная автономная скорость. Если БПС передает Предоставление на МС в момент Т1 с тем чтобы ограничить максимальную скорость данных, то МС определяет Предоставление как временно ограничивающий сигнал для скорости данных, тем самым МС выделяет скорость данных, соответствующую Предоставлению, только в момент Т2, который является первым моментом передачи для данных. То есть скорость передачи данных ниже, чем максимальная автономная скорость, назначается на основе Предоставления только в первом интервале, принимающем Предоставление. В этом случае, если новое обслуживание или МС, имеющие более высокий приоритет, непрерывно запрашивает ресурсы, Предоставление должно передаваться непрерывно с тем, чтобы ограничить автономную скорость. То есть БПС передает Предоставление на МС в каждый момент времени (с Т1 до Т4) передачи для ограничения автономной скорости. Соответственно, каналы Предоставления становятся загруженными, тем самым вызывая прямые издержки. По этой причине трудно облегчить управление обратной скоростью.
Раскрытие изобретения
Соответственно, настоящее изобретение создано для решения вышеупомянутых проблем, возникающих в предшествующем уровне, и целью настоящего изобретения является обеспечение устройства и способа для ограничения обратных автономных скоростей МС за короткий период времени для улучшения эффективности использования ресурсов для обратных данных.
Другой целью настоящего изобретения является обеспечение устройства и способа для выделения достаточных ресурсов для новых обслуживаний или пользователей, имеющих более высокий приоритет на обслуживание, посредством быстрого ограничения максимальной скорости передачи данных в тех МС, которым предоставляется управление автономной передачей, когда пользователи запрашивают обслуживание или создаются новые услуги в системе мобильной связи, включающей в себя БПС и МС.
Краткое описание чертежей
Указанные выше и другие цели, признаки и преимущества настоящего изобретения будут более очевидны из последующего подробного описания, взятого в связи с сопровождающими чертежами, на которых:
Фиг.1А является блок-схемой, иллюстрирующей традиционную процедуру передачи данных МС на основе информации управления обратной скоростью;
Фиг.1В является блок-схемой, иллюстрирующей процедуру передачи данных МС на основе информации управления обратной скоростью в соответствии с одним вариантом осуществления настоящего изобретения;
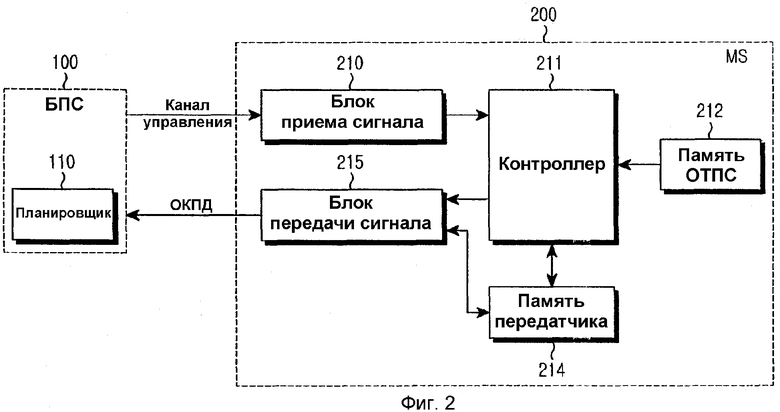
Фиг.2 является блок-схемой, иллюстрирующей структуру системы управления обратной скоростью в соответствии предпочтительным вариантом осуществления настоящего изобретения;
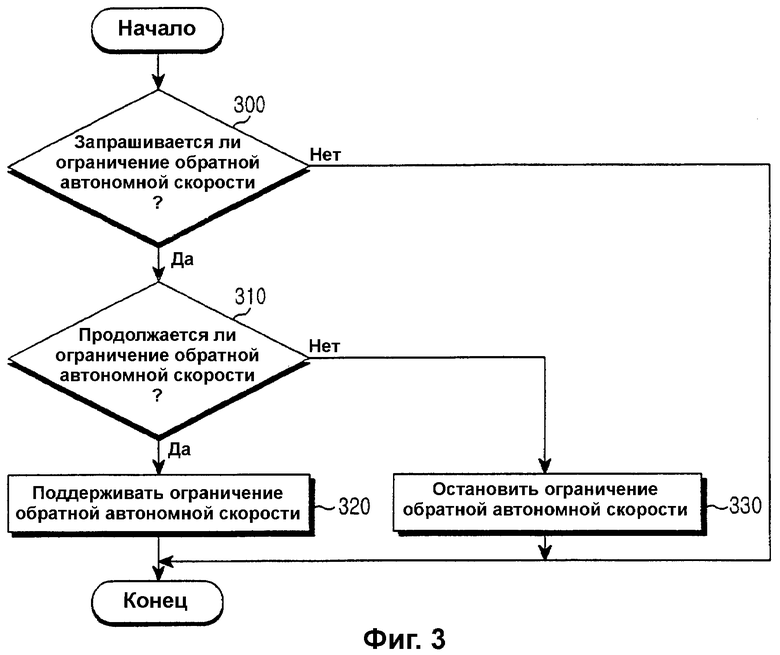
Фиг.3 является блок-схемой алгоритма, иллюстрирующей работу БПС, выполняющей способ управления обратной скоростью в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
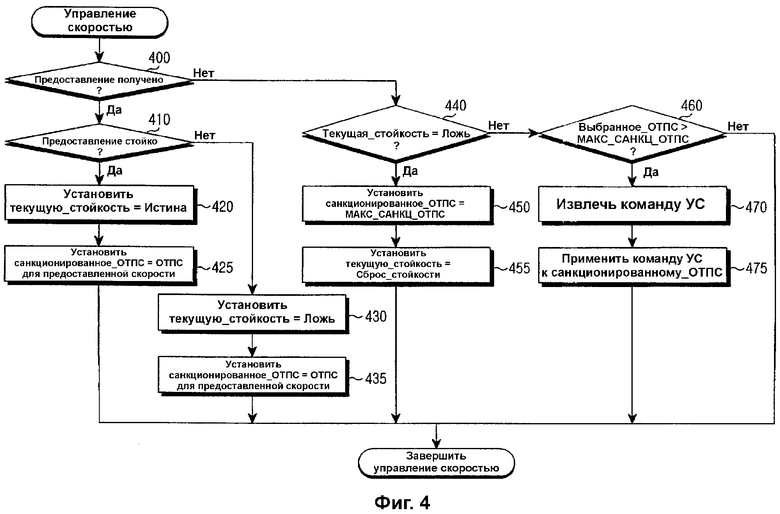
Фиг.4 является блок-схемой алгоритма, иллюстрирующей работу МС, выполняющей способ управления обратной скоростью в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
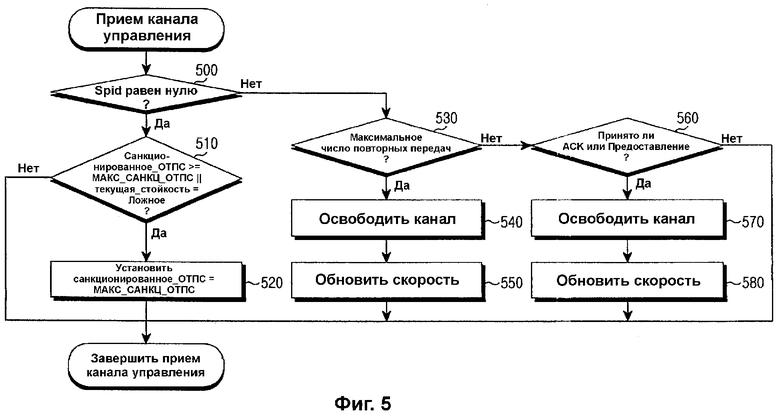
Фиг.5 является блок-схемой, иллюстрирующей работу МС, принимающей прямой канал управления; и
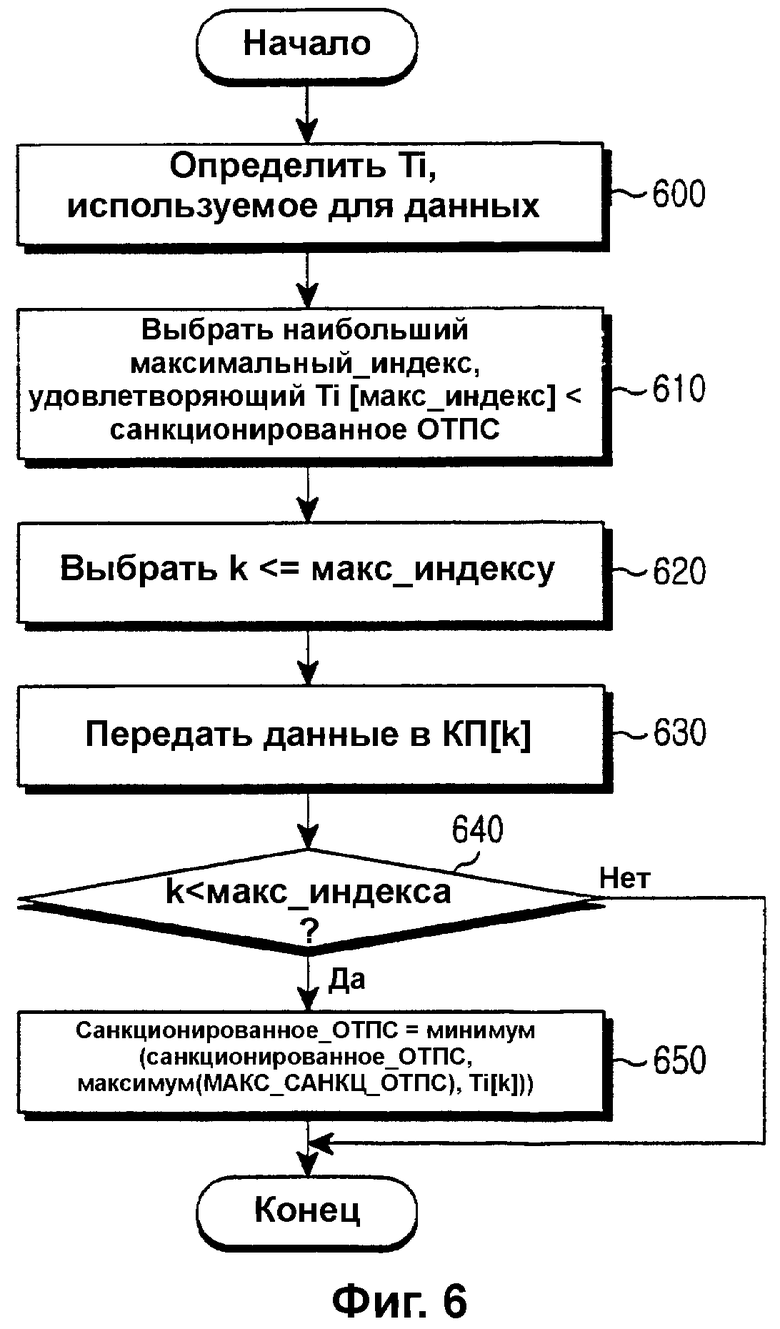
Фиг.6 является блок-схемой, иллюстрирующей процедуру передачи обратных данных в МС.
Осуществление изобретения
Ниже будут описаны предпочтительные варианты осуществления настоящего изобретения со ссылками на сопровождаемые чертежи. В последующем описании подробное описание известных функций и конфигураций, включенных сюда, будет опущено, когда это может сделать неясным сущность настоящего изобретения.
Настоящее изобретение направлено на устройство и способ выделения достаточных ресурсов для новых услуг или пользователей, имеющих более высокий приоритет на обслуживание, посредством быстрого ограничения максимальной скорости передачи данных одной или нескольких МС, для которых предоставляется управление автономной передачей, когда пользователи запрашивают обслуживание или создаются новые услуги в мобильной системе связи, включающей в себя БПС и МС.
Термин "Стойкость" используется здесь для обозначения стойкости Предоставления. В противоположность традиционному способу способ по настоящему изобретению может стойко ограничивать автономную скорость МС, разрешая БПС передавать Предоставление, включающее в себя биты стойкости данных, имеющих скорость передачи данных ниже, чем автономная скорость.
Фиг.1В является блок-схемой, иллюстрирующей способ управления обратной скоростью в соответствии с одним вариантом осуществления настоящего изобретения. БПС передает биты Предоставления и Стойкости на МС в момент Т1, с тем чтобы МС могла выбрать автономную скорость в заранее заданных подходящих обратных ресурсах на основе Предоставления, если новое Предоставление не получено в МС. Соответственно в противоположность способу управления, показанному на фиг.1А, способ управления, показанный на фиг.1В, не требует постоянной передачи Предоставления.
Фиг.2 является блок-схемой структуры системы мобильной связи в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Канал управления для передачи информации управления скоростью и ОКПД (R-PDCH) (обратный канал пакетных данных) для передачи обратных данных формируются между БПС 100 и МС 200.
БПС 100 включает в себя планировщика 110 с тем, чтобы выделять обратный канал пакетных данных из канала управления и создавать и передавать сообщение, указывающее скорость передачи данных и Стойкость данных. Планировщик 110 осуществляет планирование на основе размеров буферов, переданных ему с МС, и количества данных и информации о состоянии канала, переданной на БПС с МС, таким образом устанавливая Предоставление для передачи на МС. То есть планировщик 110 осуществляет вычисление посредством заранее заданного алгоритма с использованием размеров буферов мобильных станций, количества данных и информации о состоянии канала, получая с помощью этого порядок приоритетов между мобильными станциями для разрешения мобильным станциям передавать данные в соответствии с этим порядком приоритетов.
Здесь управление автономной скоростью предоставляется МС 200, и планировщик 110 проверяет обратную нагрузку, если создаются новые услуги, требующие большего количества ресурсов, и определяет, требуется ли ограничение обратной автономной скорости. В дополнение, планировщик 110 передает Предоставление на скорости данных ниже, чем максимальная автономная скорость, на МС 200 в соответствии с результатом вышеуказанного определения. В этот момент планировщик 110 передает биты продолжительности для Предоставления совместно с Предоставлением.
Блок 210 приема сигнала МС 200 принимает информацию канала управления с БПС 100, преобразует информацию канала управления в сигнал, который может обрабатываться посредством контроллера 211, и выдает преобразованный сигнал. В соответствии с настоящим изобретением блок 210 приема сигнала принимает Предоставление для ограничения автономной скорости, передаваемое с БПС 100, бит Стойкости и БУС (RCB) (бит управления скоростью). Предоставление включает в себя информацию санкционированного ОТПС для МС 200. Из информации Предоставления приемник 210 или МС 200 может определить или выбрать санкционированное ОТПС. Блок 210 приема передает принятую информацию на контроллер 211. Таким образом, контроллер 211 сохраняет Предоставление, бит стойкости и БУС в памяти 212 ОТПС. Память 212 ОТПС включает в себя область для сохранения по меньшей мере одного значения таблицы ОТПС и область для сохранения информации, относящейся к Предоставлению, бита Стойкости и БУС.
Память 214 передатчика может сохранять по меньшей мере две группы различных данных обслуживания. Память 214 передатчика выдает данные и информацию, относящуюся к количеству данных, сохраненных в этой памяти, на контроллер 211. В дополнение, память 214 передатчика выдает количество данных, формирующих закодированные пакеты, на блок 215 передачи сигнала в соответствии с информацией управления закодированных пакетов, выдаваемых с контроллера 211. Блок 215 передачи сигнала кодирует данные, переданные на него с памяти 214 передатчика, на основе сигнала управления, который передается на блок 215 передачи сигнала с контроллера 211, и выбирает закодированные данные, имеющие размер, соответствующий сигналу управления. Выбранные данные передаются на БПС по обратному каналу пакетных данных со скоростью передачи данных и мощностью передачи, определяемой контроллером 211.
Далее будет подробно описана работа контроллера 211. Контроллер 211 принимает Предоставление, включающее в себя бит Стойкости. В этот момент, если Предоставление, включающее в себя бит Стойкости, представляет скорость передачи данных ниже заранее заданной максимальной автономной скорости, то скорость передачи данных определяется как максимальный обратный подходящий ресурс (максимальная скорость) МС, так что выбирается скорость передачи данных, идентичная максимальному обратному пригодному ресурсу, или ниже чем максимальный обратный подходящий ресурс. В дополнение, если контроллер 211 принимает БУС после приема Предоставления, включающего в себя бит Стойкости, контроллер не изменяет максимальный обратный подходящий ресурс (санкционированное ОТПС) на основе БУС и затем контроллер 211 не учитывает БУС. Однако если контроллер 211 принимает новое Предоставление, которое является новой командой ограничения, предоставляющей скорость данных ниже, чем обратная автономная скорость, то обратный подходящий ресурс повторно устанавливается на основе нового Предоставления. Если новое Предоставление указывает, что необходимо выделить большее количество ресурсов, превышающее обратную автономную скорость, то контроллер 211 повторно устанавливает максимальный обратный подходящий ресурс посредством учета соответствующего количества ресурсов и устанавливает максимальную обратную автономную скорость для вышеупомянутой скорости передачи данных, ограниченной Предоставлением.
В соответствии с другим вариантом осуществления настоящего изобретения, даже если МС принимает Предоставление, включающее в себя бит Стойкости (=1), предоставляющий скорость передачи данных ниже, чем заранее заданная максимальная автономная скорость, то максимальный обратный подходящий ресурс (санкционированное ОТПС) может быть изменен на основе БУС, переданного на МС с БПС, с тем, чтобы увеличить или уменьшить скорость передачи данных МС.
Далее, со ссылками на фиг.3-7, будет подробно описан способ управления обратной скоростью в мобильной системе связи, имеющей вышеуказанную структуру.
Фиг.3 является блок-схемой алгоритма, иллюстрирующей способ управления обратной скоростью в БПС в соответствии с предпочтительным вариантом осуществления настоящего изобретения. На фиг.3 принято, что МС, для которых предоставляется управление обратной автономной скоростью, располагаются в зоне обслуживания БПС.
БПС проверяет обратную нагрузку во время планирования, когда создаются новые услуги или когда необходимо контролировать обратную нагрузку посредством определения, должна ли быть ограничена обратная автономная скорость (шаг 300). Если в шаге 300 определяется, что обратная автономная скорость должна быть ограничена, БПС проверяет, должно ли быть продолжено ограничение обратной автономной скорости (шаг 310). Если в шаге 310 определяется, что ограничение обратной автономной скорости должно быть продолжено, БПС создает бит Стойкости (=1) для ограничения обратной скорости и передает бит Стойкости на МС по каналу управления. Однако, если в шаге 310 определяется, что не требуется ограничения обратной автономной скорости, БПС создает Предоставление для временного ограничения обратной скорости и бит Стойкости (=0) для остановки ограничения обратной автономной скорости и отправляет Предоставление и бит Стойкости (=0) на МС.
Фиг.4 является блок-схемой алгоритма, иллюстрирующей способ управления обратной скоростью МС в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
МТ проверяет, принято ли Предоставление БПС (шаг 400). Если в шаге 400 определяется, что Предоставление принято в МС, МС проверяет бит Стойкости, включенный в Предоставление (шаг 410). То есть МС проверяет в шаге 410, установлен ли бит Стойкости в 1 или 0. Если в шаге 410 определяется, что бит Стойкости, представляющий Стойкость Предоставления, равен "1", контроллер 211 устанавливает текущую Стойкость на "Истинное" (шаг 420) и устанавливает количество обратных подходящих ресурсов (санкционированного ОТПС) на основе Предоставления (шаг 425). Однако если в шаге 410 определено, что бит Стойкости равен "0", контроллер 211 устанавливает текущую Стойкость на "Ложное" (шаг 430) и устанавливает санкционированное ОТПС в качестве ОТПС для Предоставленной скорости (шаг 435).
В то же время, если в шаге 400 определяется, что Предоставление не принято МС, МС проверяет текущую Стойкость (шаг 440). Если текущая Стойкость устанавливается на "Ложное", МС устанавливает санкционированное ОТПС для максимальной автономной скорости (шаг 450). В дополнение, когда реализуется соединение вызова между МС и БПС, МС устанавливает текущую Стойкость на ПОВТОРНО_УСТАНОВЛЕННУЮ_СТОЙКОСТЬ (шаг 455), которая определяется, когда Стойкость непрерывно поддерживается в состоянии "Ложное". Однако если в шаге 440 определяется, что Стойкость устанавливается в отношении МС, которая не принимает Предоставление, МС проверяет, больше ли количество ресурсов, которое используется в данный момент для обратной передачи, чем максимальная автономная скорость (шаг 460). Если в шаге 460 определяется, что количество ресурсов больше, чем максимальная автономная скорость, МС определяет, что принят БУС (шаг 470), таким образом МС применяет БУС для текущего санкционированного ОТПС (шаг 475).
Для ограничения автономной скорости в МС, БПС может передавать бит Стойкости (=1), предоставляющий скорость передачи данных ниже, чем максимальная автономная скорость, совместно с Предоставлением. При приеме бита Стойкости (=1) и Предоставления МС применяет БУС в шагах 470 и 475, только когда удовлетворяются условия шага 460. Однако если МС устанавливает, что санкционированное ОТПС ниже, чем максимальная автономная скорость, в момент приема бита Стойкости (=1) и Предоставления в шагах 420 и 425, МС выбирает скорость передачи данных ниже, чем максимальная автономная скорость, когда передаются данные. В этом случае не удовлетворяются условия шага 460, поэтому МС не применяет БУС. Поэтому МС, принимающая бит Стойкости (=1) и Предоставление ограничения автономной скорости, поддерживает количество подходящих ресурсов (санкционированное ОТПС) на ограниченном уровне до приема в МС следующего Предоставления.
В соответствии с другим вариантом осуществления настоящего изобретения, даже если МС принимает Предоставление, включающее в себя бит Стойкости (=1), для предоставления скорости данных ниже, чем заранее заданная максимальная обратная автономная скорость, максимальный обратный подходящий ресурс (санкционированное ОТПС) может изменяться на основе БУС, переданного на МС с БПС, с тем, чтобы увеличить или уменьшить скорость данных МС.
Для временного ограничения автономной скорости МС, БПС может передавать Предоставление, которое предоставляет скорость данных ниже, чем максимальная автономная скорость МС. При приеме Предоставления МС повторно устанавливает санкционированное ОТПС для максимального автономного ОТПС из шагов 440 и 450 на основе БУС. Затем следующие шаги выполняются обычным образом без ограничения максимальной автономной скорости.
МС, передающая данные в обратном направлении, непрерывно проверяет прямой канал управления, такой как П-ДОПКА (F-ACKCH) (прямой допускаемый канал), П-СКА (F-GCH) (прямой Предоставленный канал) и П-КАУС (прямой канал управления скоростью).
Фиг.5 является блок-схемой алгоритма, иллюстрирующей работу МС, принимающей такие прямые каналы управления. МС проверяет данные, переданные в данный момент (шаг 500). Если в шаге 500 определяется, что МС не имеет данных, подлежащих передаче, или нет переданных данных в текущий момент, МС проверяет, больше ли санкционированное ОТПС, чем максимальное автономное ОТПС, или санкционированное ОТПС ниже, чем максимальное автономное ОТПС с состоянием "Ложное" текущей Стойкости (шаг 510). Если определяется в шаге 510, что санкционированное ОТПС больше, чем максимальное автономное ОТПС, или состояние "Ложное" текущей Стойкости, МС определяет, что ресурсов для МС не требуется, поэтому МС устанавливает санкционированное ОТПС на максимальное автономное ОТПС (шаг 520). То есть МС, принимающая Стойкость Предоставления и Предоставление для управления автономной скоростью, поддерживает ограниченные ресурсы без повторного установления значения санкционированного ОТПС на значение, соответствующее автономной скорости, обязанное Стойкости Предоставления, когда санкционированное ОТПС установлено на значение ниже, чем максимальная автономная скорость. Однако МС, принимающая Предоставление с состоянием "Ложное" текущей Стойкости управления автономной скоростью, повторно устанавливает санкционированное ОТПС на значение, соответствующее максимальной автономной скорости. Затем следующие шаги выполняются обычным образом без ограничения автономной скорости.
Если в шаге 500 определяется, что переданы данные в текущий момент, МС проверяет, больше ли количество передач максимального числа повторных передач (шаг 530). В дополнение, если в шаге 530 определяется, что количество передач больше максимального числа повторных передач, МС реализует обратный канал (шаг 540) и осуществляет процедуру для управления скоростью данных идентично процедуре управления скоростью, описанной со ссылкой на фиг.4 (шаг 550).
Далее, если в шаге 530 определяется, что количество передач не превышает максимального числа повторных передач, МС проверяет, получено ли ACK или Предоставление (шаг 560). Если МС принимает ACK или Предоставление в шаге 560, МС определяет, что текущие данные должным образом переданы на БПС, таким образом МС реализует обратный канал (шаг 570). В дополнение, МС осуществляет процедуру управления для управления скоростью данных идентично процедуре управления скоростью, описанной со ссылками на фиг.4 (шаг 580).
МТ, имеющий данные, подлежащие передаче в обратном направлении, определяет действительную скорость передачи данных в диапазоне обратных подходящих ресурсов, которые в данный момент выделяются для МС. Количество подходящих ресурсов в соответствии со скоростью передачи данных устанавливается в таблице ОТПС. БПС и МС могут использовать по меньшей мере одну таблицу ОТПС в зависимости от вида различных услуг.
Фиг.6 является блок-схемой алгоритма, показывающей процедуру передачи обратных данных в МС. На фиг.6, когда создаются данные, подлежащие передаче, МС определяет Ti таблицы ОТПС, используемой для передачи данных (шаг 600). В дополнение, МС выбирает максимальный_индекс, который является максимальной скоростью, используемой для санкционированного ОТПС (санкционированное_ОТПС) (шаг 610). Максимальный индекс вычисляется так, чтобы ОТПС было меньше или равно санкционированному ОТПС, соответствующему информации, принятой от базовой станции. МС выбирает скорость в соответствии с ресурсами (Ti[k]), используемыми для действительной передачи, и индекс (k), соответствующий размеру кодированного пакета (КП) (EP) (шаг 620). Индекс выбирается таким образом, чтобы ОТПС было меньше или равно санкционированному ОТПС, соответствующему информации, принятой с базовой станции. И посредством этого передача данных с соответствующей скоростью передачи данных и размером КП (шаг 630). После передачи данных, МС должна изменить санкционированное_ОТПС. Таким образом, МС проверяет, меньше ли действительная скорость передачи данных и размер КП, чем скорость данных, соответствующая максимальному_индексу (шаг 640). Если в шаге 640 определяется, что действительная скорость передачи данных и размер КП меньше, чем скорость передачи данных, соответствующая максимальному_индексу, МС выбирает одно большее из ОТПС, соответствующее КП и максимальной автономной скорости, и повторно устанавливает санкционированное_ОТПС для меньшего выбранного из большего и санкционированного ОТПС. Однако если действительные скорость передачи данных и размер КП не меньше, чем скорость данных, соответствующая максимальному_индексу, поддерживается текущее санкционированное_ОТПС.
В соответствии с другим вариантом осуществления настоящего изобретения, если низкое санкционированное_ОТПС требуется БПС, МС повторно устанавливает санкционированное_ОТПС посредством выбора минимального значения из значения ресурсов (Ti[k]), соответствующего КП, значения МАКС_САНКЦ_ОТПС в соответствии с максимальной скоростью и значением санкционированное_ОТПС в шаге 650.
При приеме Предоставления для ограничения максимальной обратной автономной скорости и бита Стойкости Предоставления, МС устанавливает санкционированное_ОТПС на значение, меньшее чем значение обратной автономной скорости. Поэтому возможно постоянно устанавливать санкционированное_ОТПС в шаге 650 таким образом, что максимальная автономная скорость может ограничиваться, если санкционированное_ОТПС повторно не устанавливается новым Предоставлением.
Как описано выше, настоящее изобретение может выделять достаточно ресурсов для новых услуг или пользователей, имеющих более высокий приоритет для обслуживания, посредством быстрого ограничения максимальной скорости данных МС, для которых предоставляется управление автономной передачей, без усложненного предоставления каналов и причинения издержек, когда пользователи запрашивают обслуживание или создаются новые услуги в системе мобильной связи, включающей в себя БПС и МС.
Хотя изобретение показано и описано со ссылками на некоторые предпочтительные варианты осуществления, специалисту в данной области техники будет понятно, что различные изменения в форме и деталях могут быть сделаны без отхода от сущности и объема изобретения, определенных прилагаемой формулой изобретения.
Изобретение относится к устройству и способу управления обратной скоростью передачи данных, передаваемых на базовую приемопередающую станцию (БПС) с мобильных станций (МС), для которых предоставляется управление автономной скоростью. Технический результат заключается в облегчении такого управления обратной скоростью. Для этого способ включает в себя шаг проверки того, представлено ли ограничение обратной автономной скорости МС, когда из обратной загрузки определяется, что необходимо ограничение обратной автономной скорости МС, и шаг передачи информации ограничения обратной автономной скорости МС и информации, указывающей стойкость ограничения обратной автономной скорости МС, когда необходимо непрерывно поддерживать ограничение обратной автономной скорости МС. 6 н. и 28 з.п. ф-лы, 7 ил.
определяют ограничение на обратную автономную скорость МС; и
передают информацию, относящуюся к ограничению обратной автономной скорости МС, которая представляется санкционированным отношением трафика к пилотному сигналу (ОТПС), и информацию, указывающую стойкость ограничения обратной автономной скорости МС.
планировщик, определяющий ограничение обратной автономной скорости мобильной станции и передающий информацию, относящуюся к ограничению обратной автономной скорости мобильной станции, которая представляется санкционированным отношением трафика к пилотному сигналу (ОТПС), и информацию, указывающую стойкость ограничения обратной автономной скорости мобильной станции.
принимают информацию, относящуюся к ограничению обратной автономной скорости мобильной станции, которая представляется санкционированным отношением трафика к пилотному сигналу (ОТПС), и информацию, указывающую стойкость ограничения обратной автономной скорости к мобильной станции; и
определяют, необходимо ли постоянно поддерживать ограничение обратной автономной скорости в соответствии с информацией, указывающей стойкость ограничения обратной автономной скорости к мобильной станции.
приемник сигналов для приема информации, относящейся к ограничению обратной автономной скорости мобильной станции, которая представляется санкционированным отношением трафика к пилотному сигналу (ОТПС), и информации, указывающей стойкость ограничения обратной автономной скорости мобильной станции; и
контроллер, определяющий необходимо ли непрерывно поддерживать ограничение для обратной автономной скорости в соответствии с информацией, указывающей стойкость обратной автономной скорости мобильной станции.
принимают с базовой станции информацию, соответствующую санкционированному ОТПС;
выбирают ОТПС меньше или равное санкционированному ОТПС;
определяют максимальное из максимального автономного ОТПС и выбранного ОТПС; и
устанавливают санкционированное ОТПС на минимальное одного из санкционированного ОТПС и максимального.
приемник, приспособленный к приему санкционированного ОТПС с базовой станции; и
контроллер, адаптированный к выбору ОТПС, меньшему или равному санкционированному ОТПС, к определению максимального из максимального санкционированного ОТПС и выбранного ОТПС, и к установке санкционированного ОТПС на минимальное одно из санкционированного ОТПС и максимального.
| US 2002172217 А, 21.11.2002 | |||
| СПОСОБ ДЛЯ НАЗНАЧЕНИЯ ОБРАТНОГО ОБЩЕГО КАНАЛА ДЛЯ ВЫДЕЛЕННОЙ СВЯЗИ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2216107C2 |
| KR 20020076104 А, 09.10.2002 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

