Изобретение относится к устройству для измерения вязкости протекающей в трубопроводе текучей среды.
В технике измерений и автоматизации для определения вязкости протекающей в трубопроводе текучей среды, в частности жидкости, часто применяют измерительные устройства, которые с помощью измерительного датчика ротационного типа или измерительного датчика вибрационного типа и подключенной к нему электронной схемы измерительного устройства вызывают в протекающей текучей среде силы трения и создают производный от них сигнал вязкости, связанный с соответствующей вязкостью. Соответствующие устройства для измерения вязкости, а также способы измерения вязкости с помощью таких измерительных устройств описаны, например, в US-A 4524610, US-A 4704898, US-A 4754640, US-A 4920787, US-A 4922745, US-A 5157962, US-A 5228331, US-A 5448921, WO-A 95/16 897, EP-A 527176, EP-A 1158289, а также в не опубликованных европейских патентных заявках 01 120343.7 или 01 121869.0, при этом показанные в них устройства для измерения вязкости для создания срезающих усилий в текучей среде содержат электромеханический измерительный датчик с соединенной с трубопроводом измерительной трубой для пропускания текучей среды.
В принципе, указанные встроенные устройства для измерения вязкости можно подразделять на устройства, которые содержат погружаемый в текучую среду вибрирующий или же вращающийся элемент возбуждения, например вибрирующую вилку или ротационный цилиндр, и устройства, в которых вибрирует измерительная труба, через которую проходит текучая среда. Последние описаны в US-A 4524610, WO-A 95/16897 или EP-A 1158289, а также в не опубликованных европейских патентных заявках 01 120343.7 или 01 121869.0, при этом показанные в них устройства для измерения вязкости содержат:
- измерительный датчик вибрационного типа
- с соединенной с трубопроводом и вибрирующей при работе измерительной трубой для прохождения текучей среды,
- с системой возбуждения для вызывания вибрации измерительной трубы,
- с системой чувствительных элементов для измерения вибраций измерительной трубы и для создания по меньшей мере одного сигнала чувствительного элемента, представляющего вибрации измерительной трубы, а также
- электронную схему измерительного устройства, которая
- поставляет ток возбуждения, питающий систему возбуждения и
- по меньшей мере одну величину измерения вязкости, представляющую моментальную вязкость текучей среды.
Устройства для измерения вязкости указанного типа питаются от сети измерительными устройствами и должны иметь для этого по меньшей мере два электрических провода. Связанный с вязкостью сигнал вязкости, который может быть, в частности, пропорциональным вязкости, создается и выдается в соответствии с обычно используемым для этого стандартом, например, в соответствии со стандартом тока, составляющего соответственно от 4 мА до 20 мА, и/или в соответствии с обычным стандартом частоты и/или с цифровым стандартом; для этого до настоящего времени были необходимы два дополнительных провода.
В частности, при применении нескольких таких устройств для измерения вязкости в одной установке и/или при монтаже таких устройств для измерения вязкости в месте, далеко удаленном от внешних источников питания, использование дополнительного проводящего материала связано со значительными расходами на проводники.
Кроме того, в технике измерений и автоматизации существует потребность в стандартных или по меньшей мере максимально унифицированных интерфейсах между такими измерительными устройствами и, например, центральными блоками управления и регулирования. Существует также необходимость выполнения множества таких интерфейсов по возможности более систематизированными.
Поэтому целью данного изобретения является создание устройства для измерения вязкости протекающей в трубопроводе текущей среды, при этом устройство для измерения вязкости содержит:
- измерительный датчик вибрационного типа, в частности изгибно-колебательного типа,
- с по меньшей мере одной связанной с трубопроводом измерительной трубой для прохождения текучей среды и для создания действующих в текучей среде сил трения,
- с системой возбуждения для обеспечения вибрации по меньшей мере одной измерительной трубы, а также
- электронную схему измерительного устройства, имеющую задаваемую потребность в электрической мощности, которая
- поставляет ток возбуждения, питающий систему возбуждения, и
- измеряемую величину вязкости, представляющую мгновенную вязкость текучей среды,
- при этом электронная схема измерительного устройства соединена с двухпроводным контуром управления процессом и снабжается от него электрической энергией и
- при этом электронная схема измерительного устройства подает связанный с измеряемой величиной вязкости сигнал вязкости в двухпроводный контур управления процессом или регулирует его.
Согласно первому варианту выполнения изобретения
- потребность электронной схемы измерительного устройства в электрической мощности является изменяемой, и
- электронная схема измерительного устройства содержит схему управления для регулирования потребности в электрической мощности.
Согласно второму варианту выполнения электронная схема измерительного устройства содержит:
- схему возбуждения для создания тока возбуждения и
- схему оценки для измерения сигнала чувствительного элемента и для определения измеренной величины вязкости, при этом
- схема управления время от времени деактивирует схему возбуждения и/или схему оценки для уменьшения потребности в электрической мощности.
Согласно третьему варианту выполнения изобретения электронная схема измерительного устройства содержит соединенный с двухпроводным контуром управления процессом буфер энергии, который по меньшей мере частично и/или по меньшей мере временно поставляет мощность, необходимую электронной схеме измерительного устройства.
Согласно модификации третьего варианта выполнения схема управления обеспечивает временное заряжание буфера энергии.
Согласно четвертому варианту выполнения изобретения устройство измерения вязкости соединено с помощью двухпроводного контура управления процессом с полевой шиной.
Согласно пятому варианту выполнения изобретения в двухпроводном шлейфе управления процессом проходит постоянный ток, при этом сигнал вязкости предпочтительно является изменяемым постоянным током, который находится, в частности, в диапазоне от 4 мА до 20 мА, или предпочтительно цифровым сигналом.
Согласно шестому варианту выполнения изобретения измерительный датчик имеет систему чувствительных элементов для измерения вибраций измерительной трубы и для создания по меньшей мере одного представляющего их сигнала чувствительного элемента.
Согласно модификации шестого варианта выполнения электронная схема измерительного устройства регулирует ток возбуждения с помощью сигнала чувствительного элемента.
Согласно седьмому варианту выполнения изобретения схема возбуждения содержит ступень амплитудной демодуляции для создания выходного сигнала, который представляет мгновенную амплитуду колебаний вибрирующей измерительной трубы, при этом в ступень амплитудной демодуляции подается один из сигналов, созданных системой чувствительных элементов, соответственно их сумма в качестве входного сигнала.
Согласно первой модификации седьмого варианта выполнения изобретения схема возбуждения содержит ступень сравнения для определения отклонения измеренной амплитуды колебаний вибрирующей измерительной трубы от заданной номинальной амплитуды колебаний, при этом на вход ступени сравнения наряду с выходным сигналом ступени амплитудной демодуляции подается опорный сигнал, который представляет заданную амплитуду колебаний.
Согласно второй модификации седьмого варианта выполнения изобретения схема возбуждения содержит соединенную на входе с выходом ступени сравнения ступень амплитудной модуляции для создания сигнала возбуждения для схемы возбуждения, который имеет амплитуду сигнала, зависящую от полученного отклонения, при этом в ступень амплитудной модуляции со стороны входа подается наряду с сигналом ошибки, представляющим отклонение полученной амплитуды колебаний от заданной номинальной амплитуды колебаний, входной сигнал ступени амплитудной демодуляции.
Согласно третьей модификации седьмого варианта выполнения изобретения схема возбуждения имеет соединенную на входе с выходом ступени сравнения ступень широтно-импульсной модуляции для создания синхронизированного сигнала возбуждения, который имеет ширину импульса, зависящую от полученного отклонения, при этом на вход ступени широтно-импульсной модуляции наряду с сигналом ошибки, представляющим отклонение измеренной амплитуды колебаний от заданной номинальной амплитуды колебаний, подается входной сигнал ступени амплитудной демодуляции.
Изобретение основывается, в частности, на том, что изобретателям удалось создать устройство для измерения вязкости с оставленной вибрировать измерительной трубой, которое неожиданным образом может работать с минимальной передаваемой через двухпроводный контур управления процессом указанного типа, т.е. при нормальной работе такого двухпроводного измерительного устройства, с минимальной ожидаемой электрической энергией. Кроме того, при этом было установлено, что подлежащая измерению вязкость в большинстве областей применения изменяется лишь так медленно, что уже возможна низкочастотная актуализация измеренной величины вязкости и тем самым лишь временная работа измерительного датчика. Кроме того, за счет этого можно выбирать интервал времени между отдельными актуализациями измеренной величины вязкости настолько большим, - или другими словами, частоту актуализации или же частоту отсчетов можно выбирать настолько небольшой, - что даже в возможно ожидаемом случае, когда передаваемая через двухпроводный контур управления процессом энергия временно не удовлетворяет потребность в энергии устройства для измерения вязкости, можно достаточно быстро заряжать буфер энергии и тем самым всегда иметь необходимую электрическую мощность, соответственно энергию в электронной схеме измерительного устройства.
Благодаря изобретению впервые создано перспективное для рынка, пригодное для измерения текущих в трубопроводах текучих сред двухпроводное устройство для измерения вязкости. Оба проводника двухпроводного контура управления процессом служат как для питания энергией, для чего к двум проводникам необходимо подключать извне источник энергии, предпочтительно источник постоянного напряжения, так и для передачи сигнала вязкости, например, в виде модулированного измеренной величиной вязкости, изменяющегося постоянного тока.
Устройство для измерения вязкости предпочтительно выполнено так, что текущий в обоих проводниках ток отображает, в частности, возможно пропорционально сигнал преобразователя, созданный с помощью физико-электрического преобразователя; в данном измерительном устройстве физико-электрический преобразователь является по меньшей мере одной оставленной вибрировать измерительной трубой во взаимодействии с системой возбуждения и, при необходимости, системой чувствительных элементов. В устройстве измерения вязкости согласно изобретению, выполненному в соответствии с упомянутым в начале стандартом тока между 4 мА и 20 мА, мгновенная, лежащая внутри этого диапазона токов величина тока, текущего в двухпроводном контуре управления процессом, точно соответствует моментальной величине измерения вязкости. Это приводит к тому, что рабочее напряжение, например, 12 В предоставляет лишь мощность порядка от 48 мВт до 240 мВт, которая в последующем называется малой мощностью; однако для снабжения энергией устройства для измерения вязкости постоянно возможен для использования лишь диапазон токов менее 4 мА.
Устройство для измерения вязкости согласно изобретению может надежно выполнять требования различных классов защиты от взрывоопасности на основе своей необходимой для работы малой мощности. При этом измерительное устройство особенно пригодно для применения в таких взрывоопасных условиях, в которых разрешаются лишь устройства с внутренне присущей им безопасностью.
Кроме того, двухпроводное устройство для измерения вязкости можно легко выполнить так, что оно может взаимодействовать с одной из обычных полевых шин. Это можно осуществлять, с одной стороны, с помощью непосредственного соединения с полевой шиной, например, в соответствии с протоколом FIELDBUS (FIELDBUS является зарегистрированным товарным знаком фирмы FIELDBUS FOUNDATION). С другой стороны, взаимодействие может осуществляться опосредованно с помощью коммутатора шин, например, в соответствии с так называемым протоколом HART (HART является зарегистрированным товарным знаком фирмы HART User Group).
Ниже приводится подробное описание других преимуществ изобретения со ссылками на чертежи, на которых изображены предпочтительные примеры выполнения. Одинаковые по функции части на отдельных фигурах обозначены одинаковыми позициями, однако эти позиции повторяются в последующих фигурах только тогда, когда это представляется необходимым.
На фигурах изображено:
фиг.1 - устройство для измерения вязкости, предназначенное для создания величины измерения вязкости, в изометрической проекции на виде сбоку;
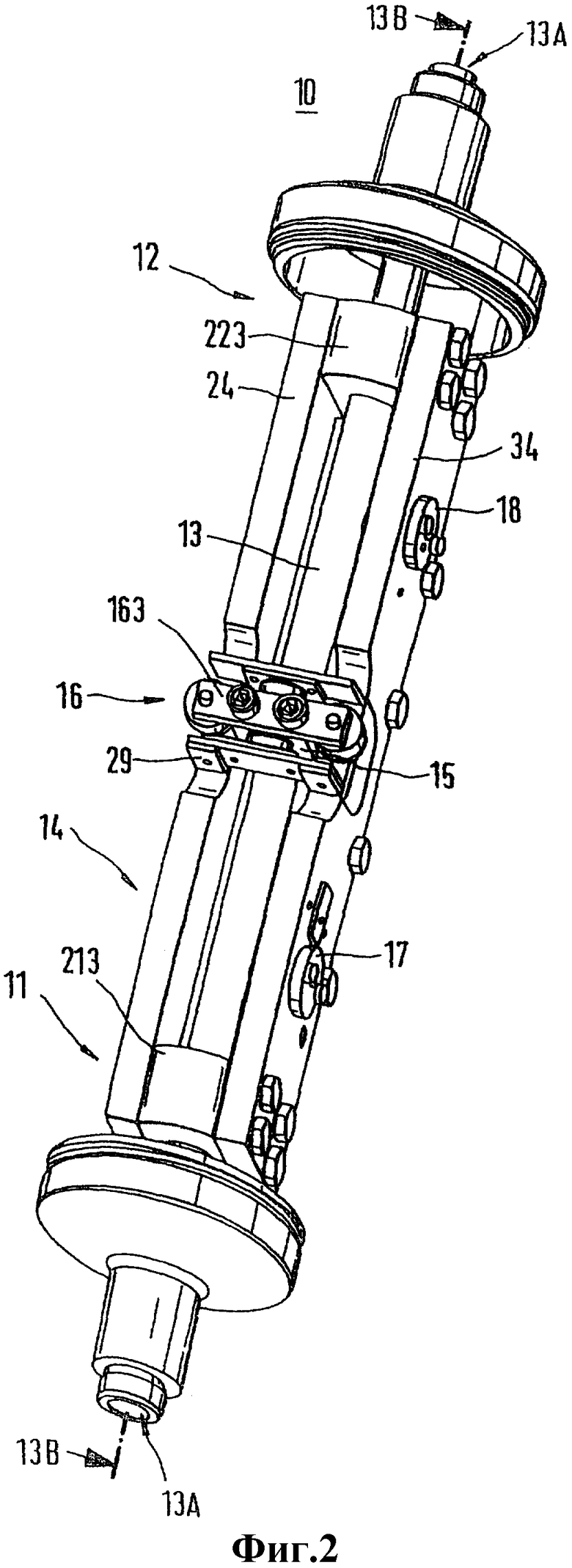
фиг.2 - пример выполнения измерительного датчика вибрационного типа, используемого в устройстве для измерения вязкости, согласно фиг.1, в изометрической проекции на виде сбоку с частичным разрезом;
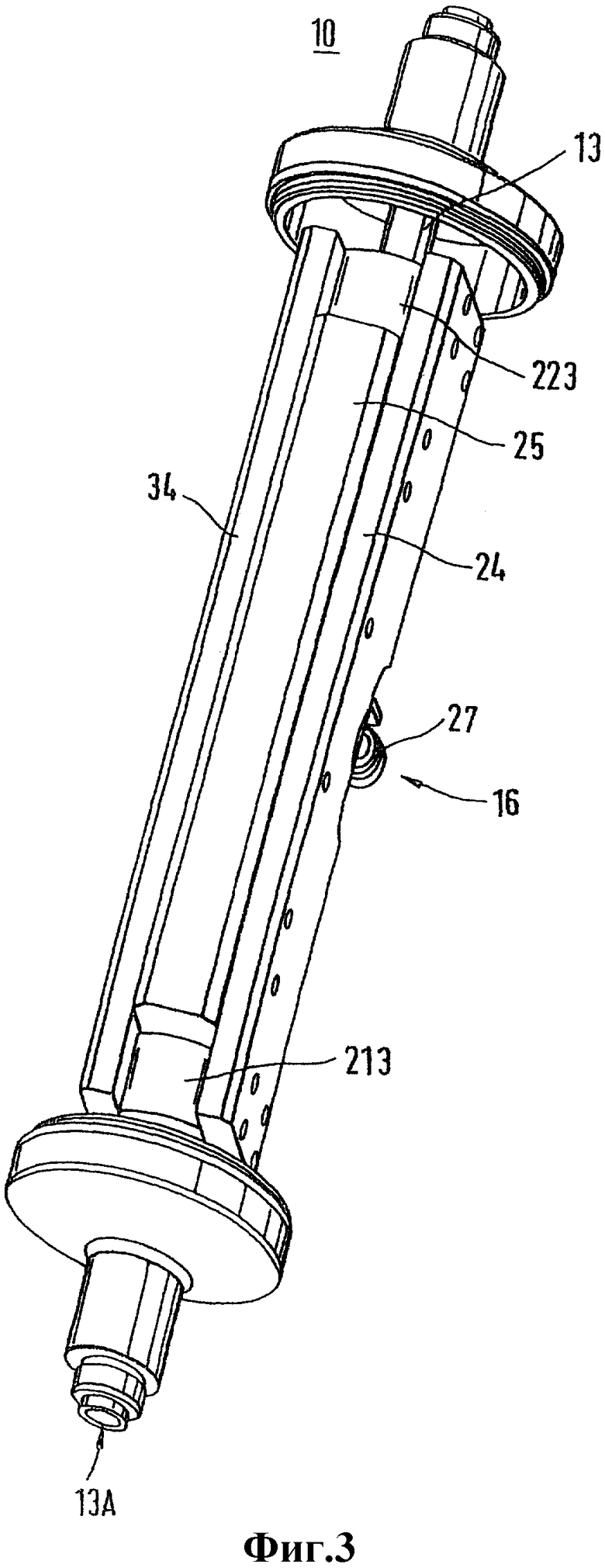
фиг.3 - измерительный датчик согласно фиг.2 в изометрической проекции на втором виде сбоку;
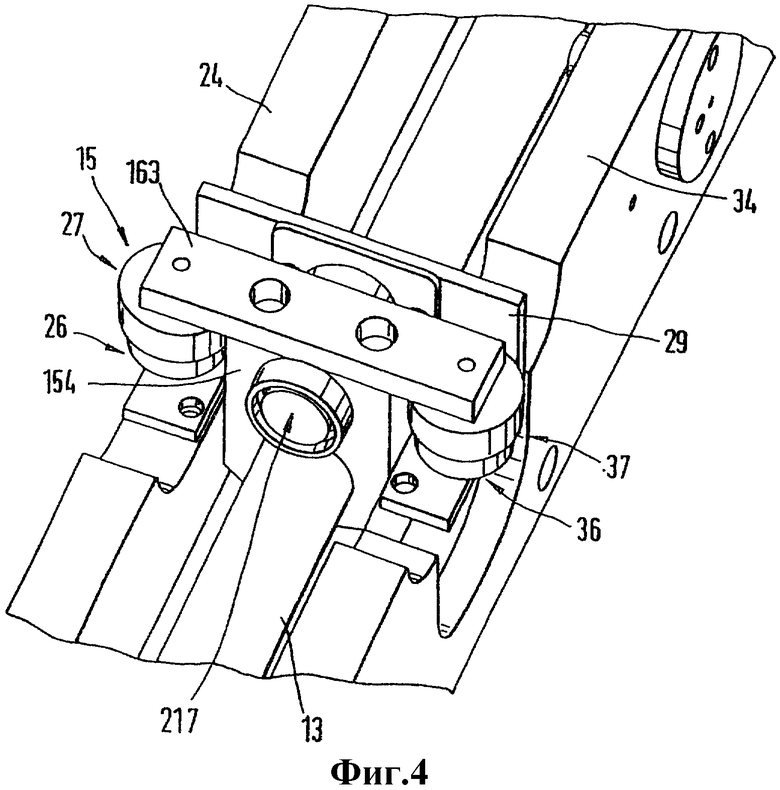
фиг.4 - пример выполнения электромеханической системы возбуждения для измерительного датчика согласно фиг.2;
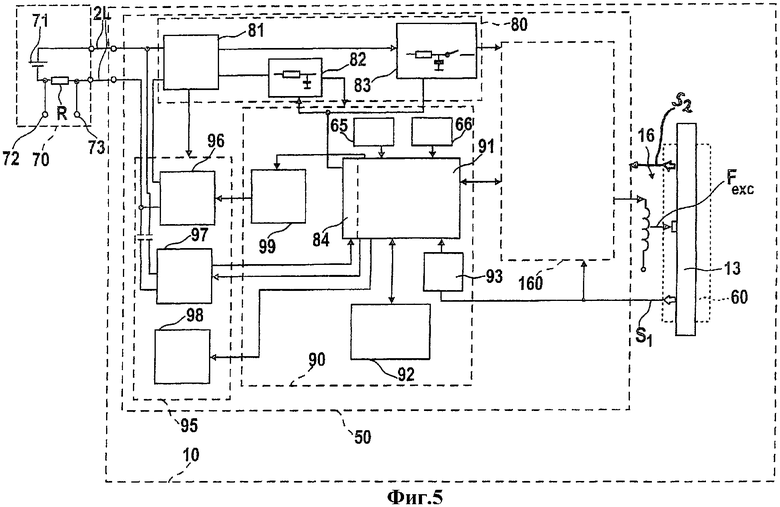
фиг.5 - блок-схема предпочтительного варианта выполнения электронной схемы измерительного устройства, используемой в устройстве для измерения вязкости согласно фиг.1-4;
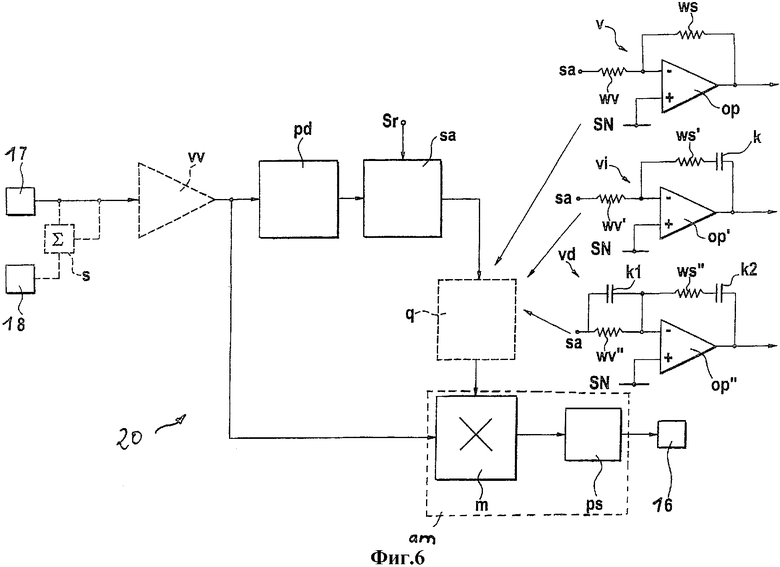
фиг.6 - блок-схема и частично принципиальная схема примера выполнения схемы возбуждения согласно первому варианту выполнения изобретения;
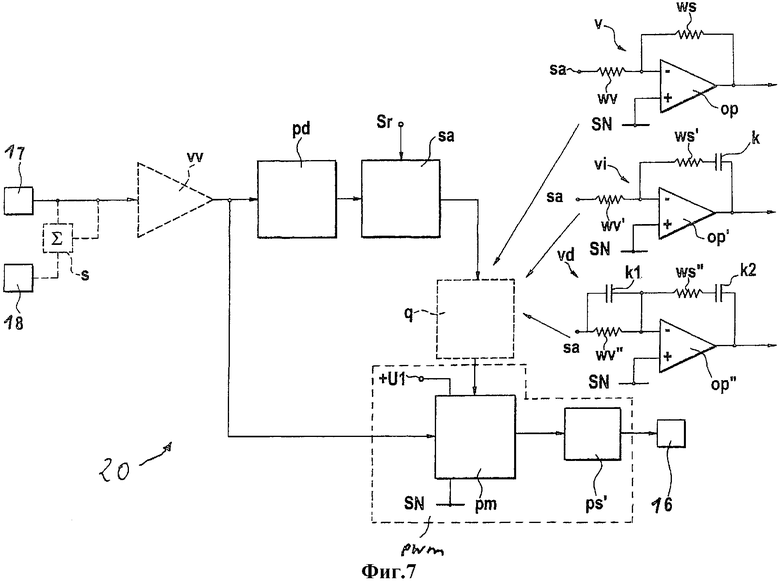
фиг.7 - блок-схема и частично принципиальная схема примера выполнения схемы возбуждения согласно второму варианту выполнения изобретения;
фиг.8 - блок-схема и частично принципиальная схема примера выполнения схемы возбуждения, согласно третьему варианту выполнения изобретения;
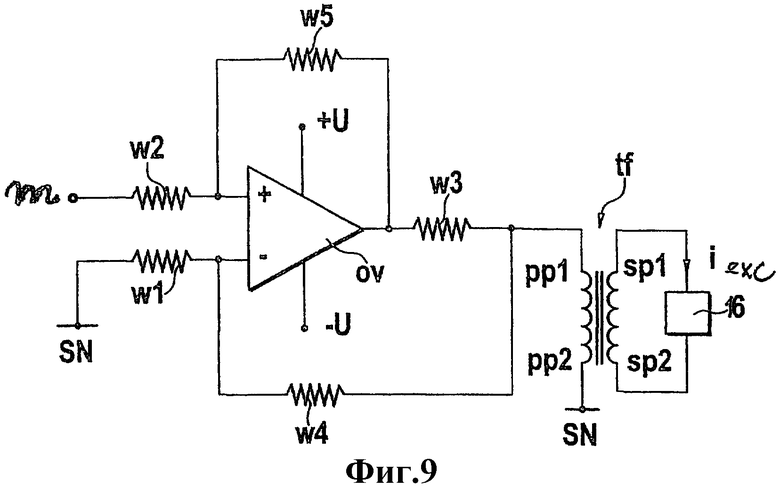
фиг.9 - принципиальная схема примера выполнения предпочтительной оконечной ступени схемы возбуждения согласно фиг.6;
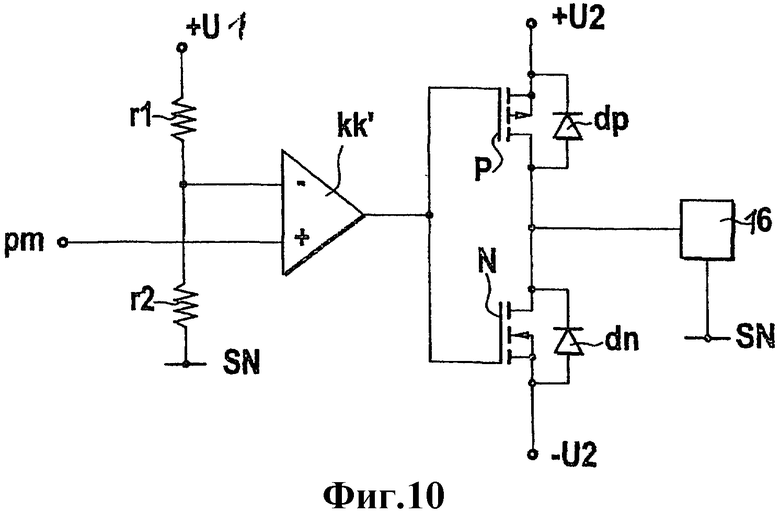
фиг.10 - принципиальная схема примера выполнения предпочтительной оконечной ступени схемы возбуждения согласно фиг.7; и
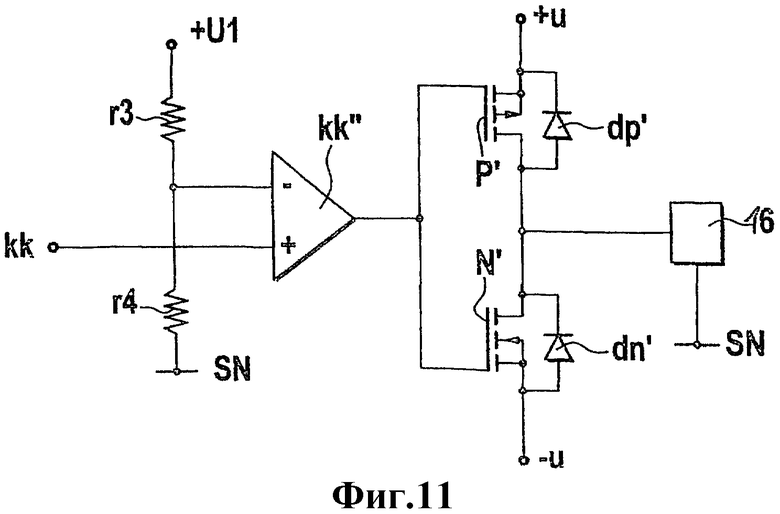
фиг.11 - принципиальная схема примера выполнения предпочтительной оконечной ступени схемы возбуждения согласно фиг.8.
На фиг.1 показано устройство 1 для измерения вязкости с предпочтительно расположенным в корпусе 100 преобразователя измерительным датчиком 10 вибрационного типа, а также с корпусом 200 для электронной схемы, в котором расположена соединенная электрически с измерительным датчиком 10 электронная схема 50 измерительного устройства; ее описание будет приведено ниже.
Устройство 1 для измерения вязкости служит для измерения вязкости η проходящей через трубопровод текучей среды и для отображения представляющей в данный момент эту вязкость η измерительной величины Xη вязкости; трубопровод по соображениям наглядности не изображен. Для обеспечения возможности измерения вязкости η в проходящей текучей среде с помощью измерительного датчика 10, в котором электронная схема 50 измерительного устройства возбуждает вибрации, создаются силы трения, которые зависят от вязкости η и которые оказывают обратное воздействие на измерительный датчик 10, которое можно измерять, т.е. улавливать с помощью чувствительных элементов и оценивать электронным способом.
На фиг.2 и 3 показан пример выполнения служащей в качестве измерительного датчика 10 физико-электрической преобразовательной системы вибрационного типа. Конструкция такой преобразовательной системы подробно описана, например, в US-A 6006609, однако для измерения других величин потока.
Для направления подлежащей измерению текучей среды измерительный датчик 10 содержит по меньшей мере одну имеющую впускной конец 11 и выпускной конец 12 измерительную трубу 13 с задаваемым при работе упругодеформируемым объемом 13А и с задаваемой номинальной шириной.
В данном случае упругая деформация объема 13А измерительной трубы означает, что для создания внутренних и тем самым описывающих текучую среду сил реакции, а именно сил срезания или же сил трения измерительного датчика 10 циклически, в частности, периодически заданным образом изменяется пространственная форма и/или пространственное положение объема 13А измерительной трубы внутри области упругости измерительной трубы 13, смотри, например, US-A 4801897, US-A 5648616, US-A 5796011 и/или US-A 6006609.
Следует настоятельно отметить, что для реализации изобретения вместо измерительного датчика согласно показанному на фиг.2 и 3 примеру выполнения можно применять практически каждый известный из уровня техники измерительный датчик для указанных других величин потока, в частности, измерительный датчик изгибно-колебательного типа с вибрирующей исключительно или по меньшей мере частично в режиме изгибных колебаний изогнутой или прямой измерительной трубой.
Другие подходящие варианты выполнения для служащих в качестве измерительных датчиков преобразовательных систем подробно описаны, например, в US-А 5301557, US-A 5357811, US-A 5557973, US-A 5602345, US-A 5648616 или US-A 5796011, полное содержание которых включается в данное описание.
В качестве материала для показанной на фиг.2 и 3 прямой измерительной трубы 13 особенно пригодны, например, сплавы титана. Однако вместо титановых сплавов можно также применять другие, в частности, применяемые обычно для изогнутых измерительных труб материалы, такие как, например, нержавеющая сталь или цирконий и т.д.
Измерительная труба 13, которая обычным образом соединена на стороне впуска и на стороне выпуска с подводящим, соответственно отводящим текучую среду трубопроводом, закреплена с возможностью колебаний в жесткой, в частности, жесткой на изгиб и крутильно-жесткой, предпочтительно окруженной корпусом 100 преобразователя несущей раме 14.
Несущая рама 14 фиксирована на измерительной трубе 13 на стороне впуска с помощью впускной пластины 213, и на стороне выпуска с помощью выпускной пластины 223, при этом обе последние пронизываются каждая соответствующими удлинительными частями измерительной трубы 13. Кроме того, несущая рама 14 имеет первую боковую пластину 24 и вторую боковую пластину 34, при этом обе боковые пластины 24, 34 закреплены каждая на впускной пластине 213 и выпускной пластине 223 так, что они проходят практически параллельно измерительной трубе 13 и расположены от нее и друг от друга на расстоянии, как показано на фиг.2. Тем самым обращенные друг к другу боковые поверхности обеих боковых пластин 24, 34 также параллельны друг другу.
Продольный стержень 25 закреплен на боковых пластинах 24, 34 на расстоянии от измерительной трубы 13 и служит в качестве балансировочной массы, гасящей колебания измерительной трубы 13. Продольный стержень 25 проходит, как показано на фиг.3, практически параллельно всей способной к колебаниям длине измерительной трубы 13; однако это не является обязательным, продольный стержень 25 можно, естественно, при необходимости выполнять более коротким.
Таким образом, несущая рама 14 с обеими боковыми пластинами 24, 34, впускной пластиной 213, выпускной пластиной 223 и продольным стержнем 25 имеет продольную линию тяжести, которая проходит практически параллельно средней оси 13В измерительной трубы, соединяющей виртуально впускной конец 11 и выпускной конец 12.
На фиг.2 и 3 с помощью головок изображенных винтов показано, что упомянутое крепление боковых пластин 23, 34 на впускной пластине 213, на выпускной пластине 223 и на продольном стержне 25 можно осуществлять с помощью свинчивания; однако можно применять также другие способы крепления, известные для специалистов в данной области техники.
В случае, если измерительный датчик 10 должен быть установлен на трубопроводе разъемно, то на измерительной трубе 13 со стороны впуска выполнен первый фланец 19, а со стороны выпуска - второй фланец 20 (смотри фиг.1); однако вместо фланцев 19, 20 могут быть предусмотрены также другие соединительные трубчатые части для разъемного соединения с трубопроводом, как, например, показанные на фиг.2 так называемые трехзажимные соединения. Однако при необходимости измерительную трубу 13 можно непосредственно соединить с трубопроводом, например, с помощью сварки или твердой пайки и т.д.
Для создания упомянутых сил трения измерительная труба 13 во время работы измерительного датчика 10 приводится в движение соединенной с измерительной трубой электромеханической системой 16 возбуждения, оставляется колеблющейся с задаваемой частотой колебаний, в частности, с естественной резонансной частотой в так называемом полезном режиме и тем самым упруго деформируется задаваемым образом; при этом следует отметить, что эта резонансная частота зависит от плотности текучей среды.
В показанном примере выполнения вибрирующая измерительная труба 13, как это является обычным для таких преобразовательных систем изгибно-колебательного типа, отклоняется из статического положения покоя в пространстве, в частности, в боковом направлении. То же относится практически к таким преобразовательным системам, в которых одна или несколько измерительных труб выполняют консольные колебания вокруг соответствующей, виртуально соединяющей соответствующие впускной конец и выпускной конец продольной оси, или же к таким преобразовательным системам, в которых одна или несколько прямых труб выполняют лишь плоские изгибные колебания относительно продольной оси измерительной трубы.
В другом случае, в котором в качестве измерительного датчика 10 служит, как, например, описано в упомянутом WO-A 95/16 897, преобразовательная система типа перистальтических радиальных колебаний и симметрично деформируется поперечное сечение вибрирующей измерительной трубы обычным для таких случаев образом, продольная ось измерительной трубы остается в своем статичном положении покоя.
Система 16 возбуждения служит для создания воздействующей на измерительную трубу 13 возбуждающей силы Fexc посредством преобразования в электронной схеме 50 измерительного устройства подаваемой электрической мощности Рехс возбуждения. Мощность Рехс возбуждения служит практически лишь для компенсации отводимой из колебательной системы доли мощности за счет механического и происходящего внутри текучей среды трения. Для обеспечения возможно более высокого коэффициента полезного действия мощность Рехс возбуждения устанавливают возможно точнее, так что колебания измерительной трубы 13 поддерживаются практически в полезном режиме, например, на основной резонансной частоте.
Для передачи силы Fexc возбуждения на измерительную трубу 13 система 16 возбуждения имеет, как показано на фиг.4, жесткую, приводимую в действие электромагнитно или электродинамически рычажную систему 15 с фиксированным без возможности изгиба на измерительной трубе 13 кронштейном 154 и ярмом 163. Ярмо 163 закреплено также без возможности изгиба на расположенном на расстоянии от измерительной трубы 13 конце кронштейна 154, а именно так, что оно расположено над измерительной трубой и поперек нее.
В качестве кронштейна 154 может служить, например, металлическая шайба, в отверстии которой размещается измерительная труба 13. Другие подходящие варианты выполнения рычажной системы 15 описаны в упомянутом US-A 6006609. Рычажная система 15 является Т-образной и расположена так, что, как показано на фиг.4, она воздействует на измерительную трубу 13 примерно в середине между впускным и выпускным концами 11, 12, за счет чего труба 13 при работе имеет наибольшие боковые отклонения в середине.
Для привода в действие рычажной системы 15 система 16 возбуждения, как показано на фиг.4, имеет первую катушку 26 возбуждения и соответствующий первый якорь 27 из постоянного магнита, а также вторую катушку 36 возбуждения и соответствующий второй якорь 37 из постоянного магнита. Обе катушки 26, 36 возбуждения, предпочтительно соединенные электрически последовательно, закреплены, в частности, разъемно, по обе стороны измерительной трубы 13 ниже ярма 163 на несущей раме 14 так, что они при работе взаимодействуют с их соответствующим якорем 27, соответственно 37. Обе катушки 26, 36 возбуждения могут быть при необходимости, естественно, соединены также параллельно друг другу.
Как показано на фиг.2 и 4, оба якоря 27, 37 закреплены на ярме 163 на расстоянии друг от друга так, что при работе измерительного датчика 10 якорь 27 пронизывается практически магнитным полем катушки 26 возбуждения, а якорь 37 - практически магнитным полем катушки 36 возбуждения, и перемещается на основании воздействия соответствующих электродинамических и/или электромагнитных сил.
Создаваемые с помощью магнитных полей катушек 26, 36 возбуждения перемещения якорей 27, 37 передаются через ярмо 163 и кронштейн 154 на измерительную трубу 13. Эти движения якорей 27, 37 выполняются так, что ярмо 163 попеременно отклоняется из своего положения покоя в направлении боковой пластины 24 или в направлении боковой пластины 34. Соответствующая параллельная уже упомянутой средней оси 13В измерительной трубы ось поворота рычажной системы 15 может проходить, например, через кронштейн 154.
Несущая рама 14 содержит дополнительно соединенный, в частности, разъемно с боковыми пластинами 24, 34 держатель 29 для электромеханической системы 16 возбуждения, в частности, для удерживания катушек 26, 36 возбуждения и при необходимости отдельных компонентов магнитной тормозной системы 217, описание которой будет приведено ниже.
В измерительном датчике 10 согласно показанному примеру выполнения боковые отклонения прочно закрепленной на впускном конце 11 и на выпускном конце 12, вибрирующей измерительной трубы 13 вызывают одновременно упругую деформацию объема 13А измерительной трубы, который выполнен практически по всей длине измерительной трубы 13.
Кроме того, в измерительной трубе 13 вследствие действующего на нее через рычажную систему 15 крутящего момента одновременно с боковыми отклонениями вызывается по меньшей мере на некоторых участках поворот средней оси 13В измерительной трубы, так что измерительная труба 13 колеблется практически в служащем в качестве полезного режима режиме изгибно-крутильных колебаний.
При этом кручение измерительной трубы 13 может выполняться так, что боковое отклонение расположенного на расстоянии от измерительной трубы конца кронштейна 154 направлено в одну сторону или противоположно боковому отклонению измерительной трубы 13. Таким образом, измерительная труба 13 может выполнять крутильные колебания в первом режиме изгибно-крутильных колебаний, соответствующем случаю одинаковой направленности, или во втором режиме изгибно-крутильных колебаний, соответствующем случаю противоположной направленности. Тогда в измерительном датчике 10 согласно этому примеру выполнения естественная основная резонансная частота второго режима изгибно-крутильных колебаний, равная, например, 900 Гц, в два раза превышает основную резонансную частоту первого режима изгибно-крутильных колебаний.
В случае, когда измерительная труба 13 должна работать лишь во втором режиме изгибно-крутильных колебаний, в систему 16 возбуждения интегрирована основанная на принципе вихревых токов магнитная тормозная система 217, которая служит для стабилизации упомянутой оси поворота. Таким образом, с помощью магнитной тормозной системы 217 может обеспечиваться то, что измерительная труба 13 всегда колеблется во втором режиме изгибно-крутильных колебаний, и тем самым возможные влияния внешних помех на измерительную трубу 13 не могут приводить к случайному переходу в другой, в частности, первый режим изгибно-крутильных колебаний. Детали такой магнитной тормозной системы подробно описаны в US-A 6006609.
Следует еще отметить, что в отклоненной таким образом в соответствии со вторым режимом изгибно-крутильных колебаний измерительной трубе 13 практически слегка деформируется подразумевающаяся средняя ось 13В измерительной трубы, и тем самым при колебаниях натягивается не плоскость, а слегка искривленная поверхность. Кроме того, лежащая на этой поверхности, описываемая средней точкой средней оси измерительной трубы траектория имеет наименьшую кривизну всех описываемых средней осью измерительной трубы траекторий.
Для обнаружения деформаций измерительной трубы 13 измерительный датчик 10 дополнительно имеет систему 60 чувствительных элементов, которая с помощью по меньшей мере одного реагирующего на вибрации измерительной трубы 13 первого чувствительного элемента 17 создает представляющий эти вибрации первый, в частности, аналоговый сигнал s1 чувствительного элемента. Чувствительный элемент 17 может быть образован, например, с помощью якоря из постоянного магнита, который закреплен на измерительной трубе 13 и взаимодействует с удерживаемой несущей рамой 14 катушкой чувствительного элемента.
В качестве чувствительных элементов 17 особенно пригодными являются такие, которые, базируясь на электродинамическом принципе, измеряют скорость отклонений измерительной трубы 13. Однако можно применять также измеряющие ускорение электродинамические или же измеряющие путь резистивные или оптические чувствительные элементы. Естественно, что можно применять также другие известные для специалистов в данной области техники и подходящие для обнаружения таких вибраций чувствительные элементы.
Система 60 чувствительных элементов дополнительно содержит, в частности, идентичный первому чувствительному элементу 17 второй чувствительный элемент 18, с помощью которого она поставляет также представляющий вибрации измерительной трубы 13 второй сигнал s2 чувствительного элемента. Оба чувствительных элемента 17, 18 в данном варианте выполнения расположены на расстоянии друг от друга на измерительной трубе 13, в частности, на равном расстоянии от середины измерительной трубы 13, в измерительном датчике 10, так что с помощью системы 60 чувствительных элементов локально измеряются вибрации измерительной трубы 13 как на стороне впуска, так и на стороне выпуска и отображаются соответствующими сигналами s1, соответственно s2 чувствительных элементов.
Первый и при необходимости второй сигналы s1, соответственно s2 чувствительных элементов, которые имеют частоту сигнала, соответствующую мгновенной частоте колебаний измерительной трубы 13, подаются, как показано на фиг.5, в электронную схему 50 измерительного устройства.
Для вызова колебаний измерительной трубы 13 в систему 16 возбуждения подается создаваемый электронной схемой 50 измерительного устройства, также колеблющийся ток iexc возбуждения регулируемой амплитуды и регулируемой частоты fexc возбуждения, так что он при работе проходит через катушки 26, 36 возбуждения, и соответствующим образом создаются магнитные поля, необходимые для движения якорей 27, 37. Ток iexc является синусным.
Частота fexc тока iexc возбуждения в этом примере выполнения выбрана и устанавливается так, что колеблющаяся в боковом направлении измерительная труба 13 по возможности колеблется в режиме изгибно-крутильных колебаний.
На фиг.5 показана блок-схема предпочтительного варианта выполнения электронной схемы 50 измерительного устройства, пригодной для измерительного устройства вязкости, показанного на фиг.1-4. На фиг.5 справа показана схематично измерительная труба 13, система 16 возбуждения и система 60 чувствительных элементов, при этом отдельно показана катушка 26 возбуждения; она лежит на нулевой точке SN схемы устройства 1 для измерения вибраций.
Упомянутая электронная схема 50 измерительного устройства обозначена штриховой рамкой и соединена с двухпроводным контуром 2L управления процессом, который в последующем будет называться коротко контуром. Она ведет от устройства 1 для измерения вязкости, например, к диспетчерскому пункту 70 управления процессом. Там контур 2L соединен с последовательным соединением из внешнего источника 71 энергии, поставляющего в контур 2L ток контура, например, источника постоянного напряжения, и измерительного сопротивления R, которое снабжено двумя измерительными выводами 72, 73 для обеспечения возможности отвода сигнала вязкости в виде падения напряжения, которое отображается или может быть подано для дальнейшей обработки сигнала. Таким образом, источник 71 энергии питает электронную схему 50 измерительного устройства необходимой для работы энергией.
Когда контур 2L работает в соответствии с давно принятым в промышленной измерительной технике стандартом тока от 4 мА до 20 мА, то для снабжения энергией в распоряжении находится диапазон токов от 0 мА до 3,6 мА.
Контур 2L ведет со своими обоими проводниками внутри электронной схемы 50 измерительного устройства сначала к регулятору 81 напряжения, который из в большинстве случаев колеблющегося напряжения источника 70 энергии создает достаточно постоянное по величине напряжение. Этим постоянным напряжением питаются все частичные схемы электронной схемы 50 измерительного устройства непрерывно или прерывисто, как это будет описано ниже.
Электронная схема 50 измерительного устройства содержит для питания системы 16 возбуждения упомянутым током iexc возбуждения схему 160 возбуждения; ее предпочтительные примеры выполнения будут описаны ниже применительно к фиг.6-11. Сначала следует лишь указать, что сигнал s1 чувствительного элемента 16 подается в схему 160 возбуждения.
Как показано на фиг.5, схема 160 возбуждения связана также с микропроцессором 91 схемы 90 оценки, из которого схема 160 возбуждения принимает, например, необходимые рабочие данные или же в который схема 160 возбуждения передает созданные внутри сигналы регулирования и/или параметры, в частности, также информацию об установленном токе iexc возбуждения и/или о подаваемой в измерительный датчик мощности Рехс возбуждения. Дополнительно к микропроцессору 91 или вместо него схема 90 оценки может иметь также цифровой сигнальный процессор, служащий для создания измерительных и рабочих данных.
Созданные в схеме 90 оценки и/или принятые измерительные или рабочие данные могут временно запоминаться, например, в памяти 92 данных.
Согласно предпочтительному варианту выполнения изобретения в схему 90 оценки подается также непосредственно сигнал s1 чувствительного элемента. Там этот сигнал через аналого-цифровой преобразователь 93 в цифровом виде попадает в сигнальный микропроцессор 91, который с помощью сигнала s1 чувствительного элемента поставляет величину Хη вязкости. Сигнальный микропроцессор 91 снабжен генератором 65 системного такта и ступенью 66 обеспечения безопасности и сброса.
С помощью регулятора 96 тока, перед которым включен питаемый цифровой величиной Хη измерения вязкости цифро-аналоговый преобразователь 99, электронная схема 50 измерительного устройства модулирует величину Xη измерения вязкости на амплитуду протекающего в контуре 2L контурного тока. Другими словами, за счет регулирования амплитуды шлейфового тока в зависимости от моментальной величины Xη электронная схема 50 измерительного устройства подает в контур 2L сигнал вязкости, связанный с величиной измерения Хη вязкости.
Согласно предпочтительному варианту выполнения изобретения, в электронной схеме 50 измерительного устройства предусмотрен дополнительно интерфейс 97 связи, который служит для преобразования наряду с величиной Xη измерения вязкости также, например, передаваемых через контур 2L внутренних параметров измерительного устройства и ввода в контур 2L, или же для приема передаваемых извне через контур 2L параметров измерительного устройства. При этом в качестве интерфейса 97 связи может служить интерфейс в соответствии с протоколом полевой связи HART© фирмы HART© Communication Foundation, Austin TX, который также применяет в качестве носителей сигналов частотно-манипулированные высокочастотные переменные напряжения.
Согласно другому предпочтительному варианту выполнения изобретения электронная схема 50 измерительного устройства содержит, по меньшей мере, один связанный с контуром 2L буфер энергии; на фиг.5 показаны два буфера, а именно буферы 82, 83 энергии. С помощью такого буфера энергии можно поставлять необходимую для электронной схемы 50 измерительного устройства мощность, по меньшей мере, частично и/или, по меньшей мере, временно, в частности, тогда, когда моментально поставляемая из контура 2L энергия недостаточна для работы электронной схемы 50 измерительного устройства.
Буфер 82 энергии постоянно подключен как к регулятору 81 напряжения, так и к схеме 90 оценки, так что он в зависимости от потребности заряжается и разряжается. В противоположность этому буфер 83 энергии соединен со схемой 160 возбуждения через переключатель, с помощью которого разрядка может быть прервана.
Согласно другому предпочтительному варианту выполнения изобретения потребность электронной схемы 50 измерительного устройства в электрической мощности, т.е. ее потребление мощности, является изменяемой, и тем самым ее можно согласовывать с действительно находящейся в распоряжении электрической мощностью. При этом изменением потребности в мощности электронной схемы 50 измерительного устройства можно управлять, например, в зависимости от имеющейся моментальной мощности или же с тактовой частотой. Поэтому с целью управления потреблением мощности в электронной схеме 50 измерительного устройства предусмотрена дополнительно схема 84 управления, которая может быть реализована, например, с помощью сигнального микропроцессора 91.
При этом регулирование потребности в электрической энергии можно выполнять, например, так, что схема 84 управления временно деактивирует схему 160 возбуждения и/или схему 90 оценки для уменьшения потребления мощности. При этом деактивация схемы 90 оценки означает, например, что последняя переводится в рабочее состояние с более низким потреблением мощности, в котором в рабочем состоянии оставляются по меньшей мере функции, которые необходимы для управления накопителем энергии, соответственно для реактивации схемы оценки, и в котором необходимые для работы схемы 90 оценки после ее реактивации измерительные данные и/или рабочие параметры можно сохранять в готовности во временной памяти данных, например, во временной памяти 92 данных. Кроме того, схему возбуждения можно деактивировать также за счет ее полного отключения.
На фиг.6 показана частично в виде блок-схемы принципиальная схема примера выполнения схемы 160 возбуждения согласно первому варианту выполнения изобретения. В ступень pd амплитудной демодуляции подается в качестве входного сигнала один из поставляемых чувствительными элементами 17, 18 сигналов или, например, их сумма. Тем самым ступень pd амплитудной демодуляции со стороны входа соединена с одним из чувствительных элементов 17, 18 - на фиг.6 это чувствительный элемент 17. Ступень pd амплитудной демодуляции служит для постоянного определения амплитуды колебаний вибрирующей измерительной трубы. Кроме того, ступень pd амплитудной демодуляции служит для выдачи выходного сигнала, например простого постоянного сигнала, который представляет эту измеренную амплитуду колебаний. Для этого согласно предпочтительному варианту выполнения изобретения в ступени pd амплитудной демодуляции предусмотрен пиковый детектор для входного сигнала. Вместо этого пикового детектора можно применять также, например, синхронный выпрямитель для измерения амплитуды колебаний, который синхронизируется опорным сигналом, одинаковым по фазе с входным сигналом.
Первый вход ступени sa сравнения соединен с выходом ступени pd амплитудной демодуляции; на второй вход ступени sa сравнения подается регулируемый опорный сигнал Sr, который задает амплитуду вибрации измерительной трубы 13. Ступень sa сравнения определяет отклонение выходного сигнала ступени pd амплитудной демодуляции от опорного сигнала Sr и выдает его в качестве соответствующего выходного сигнала. Это отклонение можно определять, например, с применением простой разницы между измеренной и заданной опорным сигналом Sr амплитудой колебаний в виде абсолютной амплитудной погрешности или же, например, с применением частного измеренной и заданной амплитуды колебаний в виде относительной амплитудной погрешности и передавать далее.
На первый вход ступени am амплитудной модуляции подается входной сигнал ступени pd амплитудной демодуляции, а на второй вход - выходной сигнал ступени sa сравнения. Ступень am амплитудной модуляции служит для модуляции по амплитуде входного сигнала ступени pd амплитудной демодуляции выходным сигналом ступени sa сравнения. При этом сигнал чувствительного элемента, соответственно сумма обоих сигналов чувствительных элементов, соответственно соответствующий пропорциональный им сигнал, смотри ниже - несущий сигнал и создаваемый с помощью ступени sa сравнения сигнал ошибки, является сигналом модуляции, который, хотя и медленно, изменяется. Сигнал ошибки представляет отклонение моментальной амплитуды колебаний измерительной трубы 13 от представляемой опорным сигналом Sr заданной амплитуды колебаний. Кроме того, ступень am амплитудной модуляции служит для подачи несущего энергию питания сигнала возбуждения для системы 16 возбуждения. Для этого ступень am амплитудной модуляции имеет соответствующую оконечную ступень ps для усиления модулированного сигналом модуляции несущего сигнала.
Для амплитудной модуляции несущего сигнала сигналом модуляции согласно предпочтительному варианту выполнения изобретения в ступени am амплитудной модуляции предусмотрен умножитель m, смотри фиг.7.
На фиг.7 показана частично в виде блок-схемы принципиальная схема примера выполнения схемы 160 возбуждения согласно второму варианту выполнения изобретения. Показанный на фиг.7 пример выполнения отличается от показанного на фиг.6 тем, что вместо ступени am амплитудной модуляции предусмотрена ступень pwm широтно-импульсной модуляции с синхронизуемым внешним переменным сигналом широтно-импульсным модулятором pm. Широтно-импульсный модулятор pm, как показано на фиг.7, питается от постоянного положительного первого напряжения +U1 и лежит на нулевой точке SN схемы.
На первый вход широтно-импульсного модулятора pm, а это вход для несущего сигнала, подается входной сигнал ступени pd амплитудной демодуляции. Тем самым этот первый вход соединен с одним из чувствительных элементов, на фиг.7 это снова чувствительный элемент 7. На второй вход широтно-импульсного модулятора pm, а это вход для сигнала модуляции, подается сигнал погрешности, пропорциональный определенной амплитудной погрешности. Выход широтно-импульсного модулятора pm соединен в свою очередь с входом оконечной ступени ps', которая со стороны выхода питает систему 16 возбуждения соответствующим сигналом возбуждения. Поставляемый оконечной ступенью ps' сигнал возбуждения является при этом прямоугольным сигналом, который синхронизирован с частотой входного сигнала ступени pd амплитудной демодуляции и который имеет ширину импульсов, модулированную выходным сигналом ступени sa сравнения.
На фиг.8 показана частично в виде блок-схемы принципиальная схема другого примера выполнения схемы 160 возбуждения согласно третьему варианту выполнения изобретения. Показанный на фиг.8 пример выполнения отличается от показанного на фиг.6 тем, что вместо умножителя m предусмотрены компаратор kk и преобразователь dc постоянного напряжения, который поставляет по меньшей мере одно питающее напряжение, создающее протекающий в систему 16 возбуждения переключаемый ток возбуждения. Амплитуда этого питающего напряжения снова зависит от выходного сигнала ступени sa сравнения и поэтому ее следует рассматривать как непостоянную. В зависимости от выполнения питающего напряжения ток возбуждения может быть биполярным или однополярным.
Поэтому преобразователь dc постоянного напряжения согласно предпочтительному варианту выполнения изобретения, показанному на фиг.8, поставляет питающее напряжение с положительным первым потенциалом +u и отрицательным вторым потенциалом -u, при этом служащий для регулирования потенциалов управляющий вход преобразователя dc постоянного напряжения принимает выходной сигнал ступени sa сравнения. Поставляемое преобразователем dc постоянного напряжения согласованное по своей амплитуде питающее напряжение подается в соответствующую, служащую для питания системы 16 возбуждения оконечную ступень ps'' ступени pwm широтно-импульсной модуляции в качестве рабочего напряжения. Кроме того, оконечная ступень ps'' соединена со стороны входа с одним выходом компаратора kk. Компаратор kk питается от постоянного положительного первого напряжения +U1 и лежит на нулевой точке SN схемы. На один вход компаратора kk подается входной сигнал пикового детектора pd. Тем самым компаратор kk со стороны входа соединен с одним из чувствительных элементов, на фиг.8 это снова чувствительный элемент 17.
На фиг.6-8 штриховыми линиями обозначено, что вместо одного из сигналов чувствительных элементов 17, 18 в пиковый детектор pd и умножитель m, соответственно широтно-импульсный модулятор pm, соответственно компаратор kk может подаваться также их сумма; в этом случае сигналы чувствительных элементов должны проходить через сумматор s.
На фиг.6-8 штриховыми линиями показаны также другие частичные схемы, которые представляют предпочтительные модификации предпочтительной схемы возбуждения.
В одной модификации схемы 160 возбуждения предусмотрен предварительный усилитель vv, который включен перед пиковым детектором pd или при необходимости перед синхронным выпрямителем.
В другой модификации схемы 160 возбуждения предусмотрен усилитель v, который усиливает выходной сигнал ступени sa сравнения, прежде чем он в качестве сигнала погрешности попадает в ступень am амплитудной модуляции. Такой усилитель может быть операционным усилителем ор, не инвертирующий вход которого лежит на нулевой точке SN схемы, а инвертирующий вход которого через предварительное сопротивление wv соединен с выходом ступени sa сравнения и через шунтирующее сопротивление ws с выходом усилителя. Включенный таким образом операционный усилитель ор показан справа вверху на фиг.6-8.
В другой предпочтительной модификации схемы 160 возбуждения предусмотрен интегрирующий усилитель vi, который усиливает и интегрирует выходной сигнал ступени sa сравнения, прежде чем он в качестве сигнала ошибки попадает в умножитель m. Такой усилитель может быть операционным усилителем ор', не инвертирующий вход которого лежит на нулевой точке SN схемы, а инвертирующий вход которого через предварительное сопротивление wv' соединен с выходом ступени sa сравнения и через последовательно соединенные шунтирующее сопротивление ws' и конденсатор k - с выходом усилителя. Включенный таким образом операционный усилитель ор' показан справа в середине на фиг.6-8.
В другой предпочтительной модификации схемы 160 возбуждения предусмотрен дифференцирующий и интегрирующий усилитель vd, который усиливает, дифференцирует и интегрирует выходной сигнал ступени sa сравнения, прежде чем он в качестве сигнала погрешности попадает в умножитель m. Такой усилитель может быть операционным усилителем ор'', не инвертирующий вход которого лежит на нулевой точке SN схемы, а инвертирующий вход которого через параллельно соединенные предварительное сопротивление wv'' и первый конденсатор k1 соединен с выходом ступени sa сравнения и через последовательно соединенные шунтирующее сопротивление ws'' и второй конденсатор k2 - с выходом усилителя. Включенный таким образом операционный усилитель ор'' показан справа внизу на фиг.6-8.
С помощью стрелок на фиг.6-8 обозначено, что соответствующий усилитель v, vi, vd следует расположить на месте изображенного штриховыми линиями квадрата q, который расположен либо между выходом ступени sa сравнения и вторым входом ступени am амплитудной модуляции, либо между выходом ступени sa сравнения и входом для сигнала модуляции ступени pwm широтно-импульсной модуляции.
В рамки изобретения входит то, что функции отдельных частичных схем, показанных на фиг.6-8, можно реализовать с помощью соответствующих аналоговых или цифровых частичных схем, в последнем случае также, например, с помощью подходящим образом запрограммированного микропроцессора, при этом подводимые к нему сигналы должны перед этим подвергаться аналого-цифровому преобразованию, а его выходные сигналы, при необходимости, - цифроаналоговому преобразованию.
На фиг.9 показана принципиальная схема предпочтительного первого примера выполнения оконечной ступени ps, которую можно использовать, например, в ступени am амплитудной модуляции, показанной на фиг.6. Операционный усилитель ov питается от положительного и отрицательного, соответствующего постоянного напряжения +U, -U и включен следующим образом. Инвертирующий вход через первое сопротивление w1 лежит на нулевой точке SN схемы, а не инвертирующий вход через второе сопротивление w2 соединен с выходом умножителя m.
Один выход операционного усилителя ov соединен через промежуточно включенное третье сопротивление w3 с первым полюсом рр1 первичной обмотки трансформатора tf; второй полюс рр2 первичной обмотки лежит на нулевой точке SN схемы. Трансформатор tf имеет также вторичную обмотку, которая своими обоими полюсами sp1, sp2 соединена с возбуждающей системой 16.
Первичная обмотка имеет число N1 первичных витков и вторичная обмотка имеет число N2 вторичных витков. Трансформатор tf является повышающим ток трансформатором и имеет коэффициент трансформации N1/N2, равный, например, 20:1.
Инвертирующий вход операционного усилителя ov соединен через четвертое сопротивление w4 с первым полюсом рр1 первичной обмотки. Не инвертирующий вход соединен через пятое сопротивление w5 с выходом.
Пять сопротивлений w1, w2, w3, w4, w5 имеют соответствующие величины сопротивления R1, R2, R3, R4, R5. Величина сопротивления R1 выбирается равной величине сопротивления R2, а величина сопротивления R4 выбирается равной величине сопротивления R5. Текущий в систему 16 возбуждения переменный ток i вычисляется по следующей формуле, где выходное напряжение умножителя m обозначено как um:

На фиг.10 показана принципиальная схема предпочтительного второго примера выполнения оконечной ступени ps', которую можно использовать, например, в ступени pwm широтно-импульсной модуляции, показанной на фиг.7. «Сердцевиной» этого варианта выполнения оконечной ступени, которая является комплементарной двухтактной оконечной ступенью, является последовательное соединение управляемой цепи тока полевого транзистора Р с каналом р-типа с обогащенным изолированным слоем с управляемой цепью тока полевого транзистора N с каналом n-типа с обогащенным изолированным слоем, которые в последующем называются коротко транзисторами.
С точкой соединения управляемых цепей тока соединена система 16 возбуждения. Параллельно каждой управляемой цепи тока включен защитный диод dn, dp, при этом соответствующий катод лежит на более положительной точке соответствующего транзистора.
Расположенный на стороне транзистора Р конец последовательного соединения лежит на неизменном положительном втором постоянном напряжении +U2, а его расположенный на стороне транзистора N конец - на соответствующем отрицательном постоянном напряжении -U2. Затворы транзисторов N, Р соединены друг с другом и с выходом компаратора kk'. He инвертирующий вход компаратора kk' соединен с выходом широтно-импульсного модулятора pm, как показано на фиг.7.
Инвертирующий вход компаратора kk' соединен с отводом делителя напряжения, который состоит из сопротивления r1 и сопротивления r2. Сопротивления r1, r2 имеют одинаковые величины и включены между положительным постоянным напряжением +U1 и нулевой точкой SN схемы. Сопротивления r1, r2 и компаратор kk' служат для симметрирования выходного сигнала широтно-импульсного модулятора pm относительно половинного значения постоянного напряжения +U1.
Таким образом, система 16 возбуждения получает при каждом положительно направленном проходе через ноль выходного сигнала чувствительного элемента 17, соответственно, суммы выходных сигналов чувствительных элементов 17, 18 отрицательный импульс тока. Соответствующая длительность этих импульсов тока автоматически устанавливается так, что достигается заданная опорным сигналом Sr амплитуда колебаний измерительной трубы 13.
На фиг.11 показана принципиальная схема предпочтительного третьего примера выполнения оконечной ступени ps', которую можно использовать, например, в ступени am амплитудной модуляции, показанной на фиг.8. «Сердцевиной» этого варианта выполнения оконечной ступени, которая снова является комплементарной двухтактной оконечной ступенью, является снова, как и на фиг.10, последовательное соединение управляемой цепи тока полевого транзистора Р с каналом р-типа с обогащенным изолированным слоем с управляемой цепью тока полевого транзистора N с каналом n-типа с обогащенным изолированным слоем, которые в последующем снова называются коротко транзисторами.
С точкой соединения управляемых цепей тока соединена система 16 возбуждения. Параллельно каждой управляемой цепи тока включен защитный диод dn', dp', при этом соответствующий катод соединен с более положительной точкой соответствующего транзистора.
Расположенный на стороне транзистора Р конец последовательного соединения лежит на зависящем от выходного сигнала ступени sa сравнения положительном постоянном напряжении +u, а его расположенный на стороне транзистора N конец - на зависящем от выходного сигнала ступени sa сравнения отрицательном постоянном напряжении -u. Затворы транзисторов N, Р соединены друг с другом и с выходом компаратора kk''. He инвертирующий вход компаратора kk'' соединен с выходом компаратора kk, как показано на фиг.8.
Инвертирующий вход компаратора kk'' соединен с отводом делителя напряжения, который состоит из сопротивления r3 и сопротивления r4. Сопротивления r3, r4 имеют одинаковые величины и включены между неизменным положительным первым постоянным напряжением +U1 и нулевой точкой SN схемы. Сопротивления r3, r4 и компаратор kk'' служат для симметрирования выходного сигнала компаратора kk относительно половинного значения постоянного напряжения +U1.
Таким образом, система 16 возбуждения получает во время каждой положительной полуволны выходного сигнала чувствительного элемента 17, соответственно суммы выходных сигналов чувствительных элементов 17, 18 положительный импульс тока, а во время каждой отрицательной полуволны выходного сигнала чувствительного элемента 17, соответственно суммы выходных сигналов чувствительных элементов 17, 18 - отрицательный импульс тока. Соответствующая длительность этих импульсов тока в свою очередь зависит от зависящих от выходного сигнала ступени sa сравнения постоянных напряжений +u, -u, так что автоматически устанавливается заданная опорным сигналом Sr амплитуда колебаний измерительной трубы 13.
Упомянутые постоянные напряжения +U1, +U2, -U2 создаются обычным образом на основе поставляемой из двухпроводного шлейфа управления процессом энергии. Можно также вместо обоих положительных напряжений +U1, +U2 предусматривать лишь одно единственное положительное напряжение.
Упомянутый двухпроводный шлейф управления процессом пропускает, согласно изобретению предпочтительно служащий для питания энергией постоянный ток, который, например, в соответствии со стандартом охватывает диапазон от 4 мА до 20 мА. С другой стороны, измерительный сигнал может быть предпочтительно цифровым сигналом, так что двухпроводный шлейф управления процессом может быть подключен к полевой шине.
Схема возбуждения согласно изобретению представляет вместе с измерительной трубой 13 контур регулирования, который настраивается электрически как на механическую резонансную частоту возбуждаемых вибраций измерительной трубы 13, так и на задаваемую опорным сигналом Sr амплитуду этих вибраций.
Поэтому отпадает необходимость в обычных до настоящего времени схемах возбуждения, которые имеют ступень регулирования амплитуды и контур с блокировкой фазы, так называемую систему фазовой автоподстройки частоты (PLL), для регулирования резонансной частоты и амплитуды вибраций. Используемые до настоящего времени схемы возбуждения не только являются сложными в отношении числа необходимых компонентов, но они также требуют значительно больше энергии питания, чем имеется в распоряжении в двухпроводных измерительных устройствах.
Схема 160 возбуждения согласно изобретению нуждается лишь в небольшом количестве компонентов, которые тем самым в совокупности имеют лишь практически пренебрежительно малую мощность потерь, так что имеющуюся в распоряжении небольшую энергию питания можно использовать почти исключительно для возбуждения.

Изобретение предназначено для измерения вязкости проходящей через трубопровод текучей среды, в частности, во взрывоопасных зонах. Устройство содержит измерительный датчик вибрационного типа с по меньшей мере одной при работе вибрирующей измерительной трубой для прохождения текучей среды. Для обеспечения вибрации измерительной трубы предусмотрена система возбуждения, через которую проходит ток возбуждения. Для создания тока возбуждения, а также для получения измеряемой величины вязкости, представляющей мгновенную вязкость текучей среды, устройство имеет электронную схему, которая соединена с двухпроводным контуром управления процессом, подключенным к источнику постоянного напряжения. Электронная схема также подает сигнал вязкости в двухпроводный контур управления процессом. В варианте выполнения электронная схема модулирует измеряемую величину вязкости на амплитуду постоянного тока, протекающего в двухпроводном контуре. Изобретение обеспечивает возможность использования стандартного интерфейса и может работать в диапазоне токов менее 4 мА. 2 н. ф-лы, 26 з.п. ф-лы, 11 ил.
потребность электронной схемы (50) измерительного устройства в электрической мощности является изменяемой, и электронная схема (50) измерительного устройства содержит схему (84) управления для регулирования потребности в электрической мощности.
Приоритет по пунктам:
| US 4524610 A, 25.06.1985 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5253533 A, 19.10.1993 | |||
| Кориолисовый расходомер | 1991 |
|
SU1793234A1 |

