ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Нижеописанные варианты осуществления относятся к вибродатчикам и, в частности, к управлению колебаниями вибродатчика на основании фазового рассогласования.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Вибродатчики, например, вибрационные денситометры и вибрационные вискозиметры, действуют посредством регистрации движения колеблющегося элемента, который колеблется в присутствии текучей среды, характеристики которой подлежат измерению. Колебательный элемент имеет колебательный отклик, который может иметь такой параметр колебательного отклика, как резонансная частота или добротность Q. Колебательный отклик колеблющегося элемента зависит, как правило, от суммарных характеристик массы, жесткости и демпфирования колеблющегося элемента в сочетании с текучей средой. Свойства, связанные с текучей средой, например, плотность, вязкость, температура и т.п., можно определить обработкой колебательного сигнала или колебательных сигналов, принимаемых из одного или более измерительных преобразователей перемещения, соединенных с колеблющимся элементом. Обработка колебательного сигнала может включать в себя определение параметра колебательного отклика.
Фиг. 1 представляет вибродатчик известного уровня техники, содержащий колебательный элемент и измерительную электронную секцию, соединенную с колебательным элементом. Вибродатчик известного уровня техники включает в себя возбудитель для приведения колебательного элемента в колебательное движение и чувствительный элемент, который создает колебательный сигнал в ответ на колебания. Колебательный сигнал обычно является непрерывным или аналоговым сигналом. Измерительная электронная секция принимает колебательный сигнал и обрабатывает колебательный сигнал, чтобы получать одну или более характеристик текучей среды или результаты измерения текучей среды. Измерительная электронная секция определяет как частоту, так и амплитуду колебательного сигнала. Частота и амплитуда колебательного сигнала могут дополнительно обрабатываться для определения плотности текучей среды.
Вибродатчик известного уровня техники обеспечивает сигнал возбуждения для возбудителя с использованием замкнутой схемы. Сигнал возбуждения обычно основан на принятом колебательном сигнале. Замкнутая схема известного уровня техники обычно модифицирует или включает колебательный сигнал или параметры колебательного сигнала в сигнал возбуждения. Например, сигнал возбуждения может быть усиленным, модулированным или иначе модифицированным вариантом принятого колебательного сигнала. Поэтому принятый колебательный сигнал может содержать обратную связь, которая позволяет замкнутой схеме обеспечивать целевую частоту. При использовании обратной связи, замкнутая схема инкрементным методом изменяет частоту возбуждения и контролирует колебательный сигнал, пока не достигается целевая частота.
Такие свойства текучей среды, как вязкость и плотность текучей среды, можно определять по частотам, на которых разность фаз между сигналом возбуждения и колебательным сигналом равна 135° и 45°. Данные требуемые разности фаз, именуемые первой разностью φ1 фаз нерезонансных колебаний и второй разностью φ2 фаз нерезонансных колебаний, могут соответствовать граничным частотам на уровне половинной мощности или 3 дБ. Первая нерезонансная частота ω1 определяется как частота, на которой первая разность φ1 фаз нерезонансных колебаний равна 135°. Вторая нерезонансная частота ω2 определяется как частота, на которой вторая разность φ2 фаз нерезонансных колебаний равна 45°. Результаты измерения плотности, выполненные на второй нерезонансной частоте ω2, могут быть независимыми от вязкости текучей среды. Соответственно, результаты измерения плотности, выполненные, когда вторая разность φ2 фаз нерезонансных колебаний равна 45°, могут быть более точными, чем результаты измерения плотности, выполненные при других разностях фаз.
Первая и вторая разности φ1, φ2 фаз нерезонансных колебаний обычно не известны до измерения. Соответственно, замкнутая схема должна инкрементным методом приближаться к первой и второй разностям φ1, φ2 фаз нерезонансных колебаний с использованием вышеупомянутой обратной связи. Инкрементный метод, связанный с замкнутой схемой, может вызывать задержку определения параметра колебательного отклика и, поэтому, вызывать задержку определения вязкости, плотности или других свойств текучей среды. Задержки получения упомянутых результатов измерений могут слишком дорого обходиться во многих случаях применения вибродатчика.
Соответственно, существует потребность в управлении колебаниями вибродатчика на основании фазового рассогласования. Существует также потребность в достижении первой и второй разностей φ1, φ2 фаз нерезонансных колебаний без задержек, связанных с замкнутой схемой.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предлагается способ управления колебаниями колебательного элемента на основании фазового рассогласования. В соответствии с вариантом осуществления, способ содержит этап приведения колебательного элемента в колебательное движение с помощью сигнала возбуждения, этап приема колебательного сигнала от колебательного элемента и этап измерения разности фаз между сигналом возбуждения и колебательным сигналом. Способ также содержит этап определения фазового рассогласования между целевой разностью фаз и измеренной разностью фаз и этап вычисления одной или более составляющих управления колебаниями по найденному фазовому рассогласованию.
Предлагается измерительная электронная секция для управления колебаниями колебательного элемента. В соответствии с вариантом осуществления, измерительная электронная секция содержит схему возбуждения, соединенную с колебательным элементом, при этом схема возбуждения выполнена с возможностью подачи сигнала возбуждения в колебательный элемент. Измерительная электронная секция также содержит приемную схему, соединенную с колебательным элементом, при этом приемная схема выполнена с возможностью приема колебательного сигнала из колебательного элемента. Измерительная электронная секция выполнена с возможностью измерения разности фаз между сигналом возбуждения и колебательным сигналом, определения фазового рассогласования между целевой разностью фаз и измеренной разностью фаз и вычисления одной или более составляющих управления колебаниями по найденному фазовому рассогласованию.
АСПЕКТЫ
В соответствии с аспектом, способ управления колебаниями колебательного элемента по фазовому рассогласованию содержит этап приведения колебательного элемента в колебательное движение с помощью сигнала возбуждения, этап приема колебательного сигнала от колебательного элемента, этап измерения разности фаз между сигналом возбуждения и колебательным сигналом, этап определения фазового рассогласования между целевой разностью фаз и измеренной разностью фаз и этап вычисления одной или более составляющих управления колебаниями по найденному фазовому рассогласованию.
В предпочтительном варианте одна или более составляющих управления колебаниями является составляющей в контуре пропорционально-интегрального управления.
В предпочтительном варианте этап определения фазового рассогласования содержит вычисление фазового рассогласования по уравнению:

В предпочтительном варианте одна или более составляющих управления колебаниями является составляющей пропорционального усиления для контура пропорционально-интегрального управления, который принимает найденное фазовое рассогласование.
В предпочтительном варианте составляющая пропорционального усиления вычисляется по уравнению:

где Kp является постоянным коэффициентом пропорционального усиления.
В предпочтительном варианте составляющая управления колебаниями является интегральной составляющей для контура управления, который принимает найденное фазовое рассогласование.
В предпочтительном варианте интегральная составляющая вычисляется по уравнению:

где Ki является постоянным коэффициентом интегральной составляющей.
В предпочтительном варианте способ дополнительно содержит этап генерации управляющей частоты по найденному фазовому рассогласованию и этап подачи управляющей частоты в генератор сигналов, который выполнен с возможностью генерации сигнала возбуждения, который приводит колебательный элемент в колебательное движение на управляющей частоте.
В предпочтительном варианте управляющая частота генерируется с использованием интегральной составляющей и составляющей пропорционального усиления.
В предпочтительном варианте управляющая частота генерируется с использованием интегральной составляющей и составляющей пропорционального усиления посредством суммирования интегральной составляющей и составляющей пропорционального усиления по уравнению:

В соответствии с аспектом, измерительная электронная секция (20) для управления колебаниями колебательного элемента (104) содержит схему (138) возбуждения, соединенную с колебательным элементом (104), при этом схема (138) возбуждения выполнена с возможностью подачи сигнала возбуждения в колебательный элемент (104), и приемную схему (134), соединенную с колебательным элементом (104), причем приемная схема (134) выполнена с возможностью приема сигнала возбуждения из колебательного элемента (104). Измерительная электронная секция (20) выполнена с возможностью измерения разности фаз между сигналом возбуждения и колебательным сигналом, определения фазового рассогласования между целевой разностью фаз и измеренной разностью фаз и вычисления одной или более составляющих управления колебаниями по найденному фазовому рассогласованию.
В предпочтительном варианте одна или более составляющих управления колебаниями является составляющей в контуре пропорционально-интегрального управления.
В предпочтительном варианте измерительная электронная секция (20), выполненная с возможностью определения фазового рассогласования, содержит измерительную электронную секцию (20), выполненную с возможностью вычисления фазового рассогласования по уравнению:
В предпочтительном варианте, одна или более составляющих управления колебаниями является составляющей пропорционального усиления для контура пропорционально-интегрального управления, который принимает найденное фазовое рассогласование.
В предпочтительном варианте составляющая пропорционального усиления вычисляется по уравнению:
где Kp является постоянным коэффициентом пропорционального усиления.
В предпочтительном варианте составляющая управления колебаниями является интегральной составляющей для контура управления, который принимает найденное фазовое рассогласование.
В предпочтительном варианте интегральная составляющая вычисляется по уравнению:
где Ki является постоянным коэффициентом интегральной составляющей.
В предпочтительном варианте измерительная электронная секция (20) дополнительно выполнена с возможностью генерации управляющей частоты (ωc) по найденному фазовому рассогласованию и подачи управляющей частоты (ωc) в генератор (147c) сигналов, который выполнен с возможностью генерации сигнала возбуждения, который приводит колебательный элемент (104) в колебательное движение на управляющей частоте (ωc).
В предпочтительном варианте управляющая частота (ωc) генерируется с использованием интегральной составляющей и составляющей пропорционального усиления.
В предпочтительном варианте управляющая частота (ωc) генерируется с использованием интегральной составляющей и составляющей пропорционального усиления посредством суммирования интегральной составляющей и составляющей пропорционального усиления по уравнению:
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Одинаковые числовые позиции обозначают одинаковые элементы на всех чертежах. Следует понимать, что чертежи выполнены не обязательно в масштабе.
Фиг. 1 - вибродатчик известного уровня техники, содержащий колебательный элемент и измерительную электронную секцию, соединенную с колебательным элементом.
Фиг. 2 - вибродатчик 5 в соответствии с вариантом осуществления.
Фиг. 3 - вибродатчик 5 в соответствии с вариантом осуществления.
Фиг. 4 - блок-схема вибродатчика 5 с более подробным представлением схемы 138 возбуждения.
Фиг. 5 - график 500 амплитудно-частотных характеристик, поясняющий колебательный отклик колебательного элемента.
Фиг. 6 - график 600 фазово-частотных характеристик, поясняющий колебательный отклик колебательного элемента.
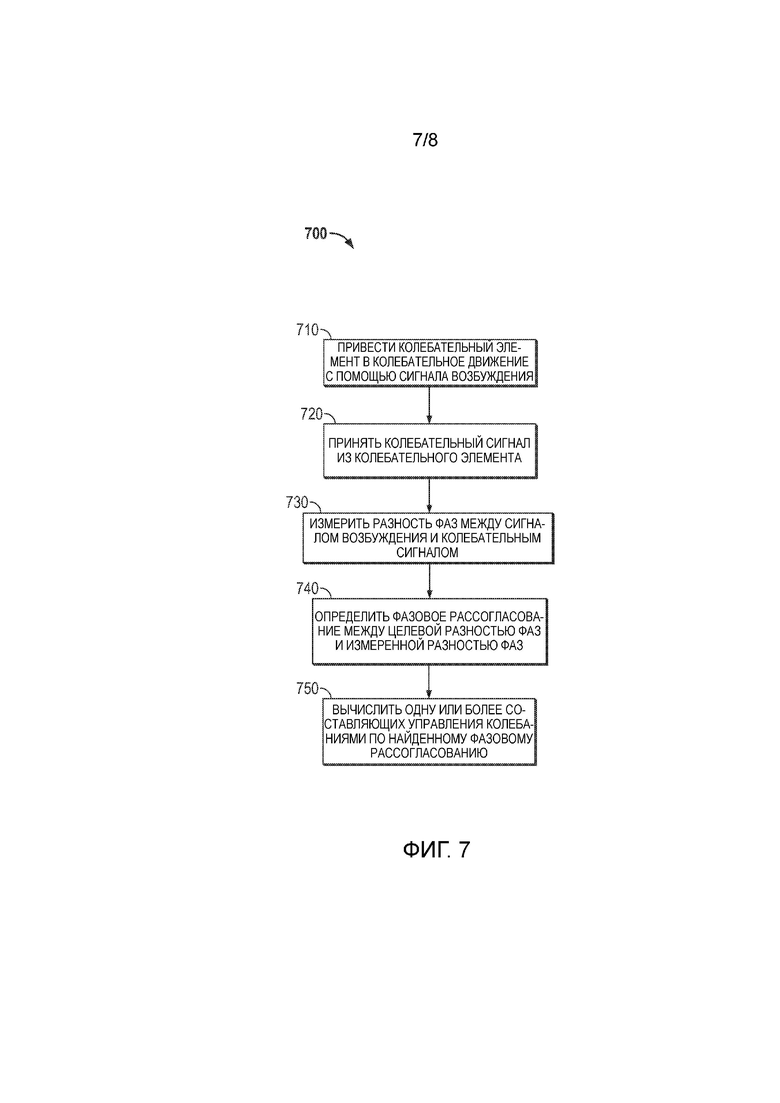
Фиг. 7 - способ 700 управления колебаниями колебательного элемента по фазовому рассогласованию.
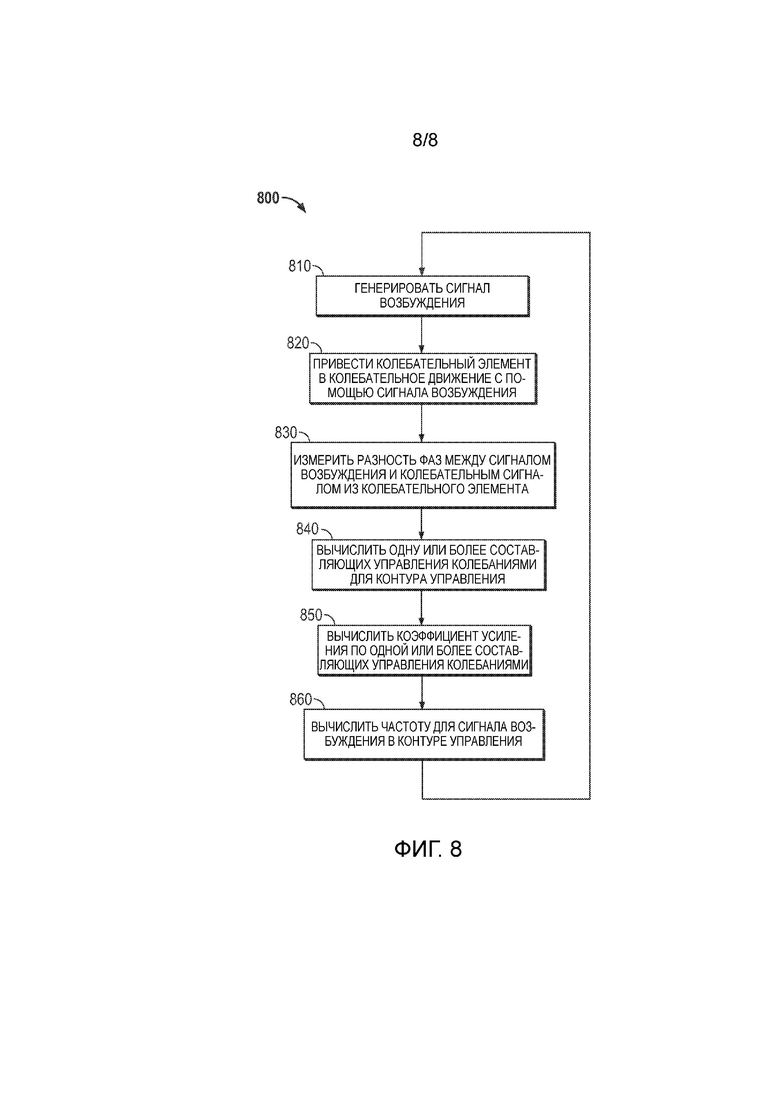
Фиг. 8 - другой способ 800 управления колебаниями колебательного элемента по фазовому рассогласованию.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг. 1-8 и последующее описание иллюстрируют конкретные примеры для ознакомления специалистов в данной области техники с тем, как выполнять и применять наиболее предпочтительные варианты осуществления для управления колебаниями вибродатчика по фазовому рассогласованию. С целью ознакомления с принципами изобретения, некоторые стандартные аспекты были упрощены или не рассматриваются. Специалистам в данной области техники будут понятны изменения данных примеров, которые не выходят за пределы объема настоящего описания. Специалистам в данной области техники будет понятно, что нижеописанные признаки можно сочетать различными способами, чтобы формировать несколько изменений управления колебаниями вибродатчика по фазовому рассогласованию. В результате, нижеописанные варианты осуществления не ограничены конкретными нижеописанными примерами, а ограничены только формулой изобретения и ее эквивалентами.
Фиг. 2 представляет вибродатчик 5 в соответствии с вариантом осуществления. Вибродатчик 5 может содержать колебательный элемент 104 и измерительную электронную секцию 20, при этом колебательный элемент 104 соединен с измерительной электронной секцией 20 выводом или выводами 100. В некоторых вариантах осуществления вибродатчик 5 может содержать камертонный вибродатчик или вилочный датчик плотности (смотри фиг. 3 и сопутствующее описание). Однако, другие вибродатчики также применимы и не выходят за пределы объема описания и формулы изобретения.
Вибродатчик 5 может быть, по меньшей мере, частично погруженным в текучую среду, характеристики которой подлежат измерению. Текучая среда может содержать жидкость или газ. В качестве альтернативы, текучая среда может содержать многофазную текучую среду, например, жидкость, которая включает в себя увлеченный газ, механические примеси, сложносоставные жидкости или сочетания перечисленных текучих сред. Некоторые примерные текучие среды включают в себя цементные растворы, нефтепродукты или подобные среды. Вибродатчик 5 можно устанавливать в трубе или трубопроводе, баке, контейнере или другой емкости для текучей среды. Вибродатчик 5 можно также устанавливать в распределительном трубопроводе или аналогичной конструкции для направления потока текучей среды. Однако, другие схемы установки также применимы и не выходят за пределы объема описания и формулы изобретения.
Вибродатчик 5 выполняет функцию обеспечения результатов измерения текучей среды. Вибродатчик 5 может обеспечивать результаты измерения текучей среды, включая что-то одно или более из плотности текучей среды и вязкости текучей среды для текучей среды, включая текущие и нетекущие текучие среды. Вибродатчик 5 может обеспечивать результаты измерения текучей среды, включая массовую скорость потока текучей среды, объемную скорость потока текучей среды и/или температуру текучей среды. Приведенный перечень не является исчерпывающим, и вибродатчик 5 может измерять или определять другие характеристики текучих сред.
Измерительная электронная секция 20 может подавать электропитание в колебательный элемент 104 по выводу или выводам 100. Измерительная электронная секция 20 управляет работой колебательного элемента 104 по выводу или выводам 100. Например, измерительная электронная секция 20 может генерировать сигнал возбуждения и подавать генерируемый сигнал возбуждения в колебательный элемент 104, при этом колебательный элемент 104 генерирует колебания в одном или более колебательных компонентов с использованием генерируемого сигнала возбуждения. Генерируемый сигнал возбуждения может управлять амплитудой и частотой колебаний колебательного элемента 104. Генерируемый сигнал возбуждения может также управлять длительностью колебаний и/или временной привязкой колебаний.
Измерительная электронная секция 20 может также принимать колебательный сигнал или сигналы из колебательного элемента 104 по выводу или выводам 100. Измерительная электронная секция 20 может обрабатывать колебательный сигнал или сигналы, чтобы формировать, например, результат измерения плотности. Измерительная электронная секция 20 обрабатывает колебательный сигнал или сигналы, принимаемые из колебательного элемента 104, чтобы определять частоту сигнала или сигналов. Кроме того или дополнительно, измерительная электронная секция 20 обрабатывает колебательный сигнал или сигналы, чтобы определять другие характеристики текучей среды, например, вязкость или разность фаз между сигналами, которые можно обрабатывать, например, для определения скорости потока текучей среды. Как можно понять, разность фаз обычно измеряют или выражают в таких пространственных единицах, как градусы или радианы, хотя можно применять любые подходящие единицы, например, временные единицы. Если применяются временные единицы, то разность фаз может называться временной задержкой между колебательным сигналом и сигналом возбуждения специалистами в данной области техники. Другие характеристики колебательного отклика и/или результаты измерения текучей среды также предполагаются возможными и не выходят за пределы объема описания и формулы изобретения.
Измерительная электронная секция 20 может быть дополнительно соединена с линией 26 связи. Измерительная электронная секция 20 может передавать колебательный сигнал по линии 26 связи. Измерительная электронная секция 20 может также обрабатывать принятый колебательный сигнал, чтобы формировать значение или значения измерения и может передавать значение или значения измерения по линии 26 связи. Дополнительно, измерительная электронная секция 20 может принимать информацию по линии 26 связи. Например, измерительная электронная секция 20 может принимать команды, обновления, рабочие значения или изменения рабочих значений и/или обновления или изменения программ по линии 26 связи.
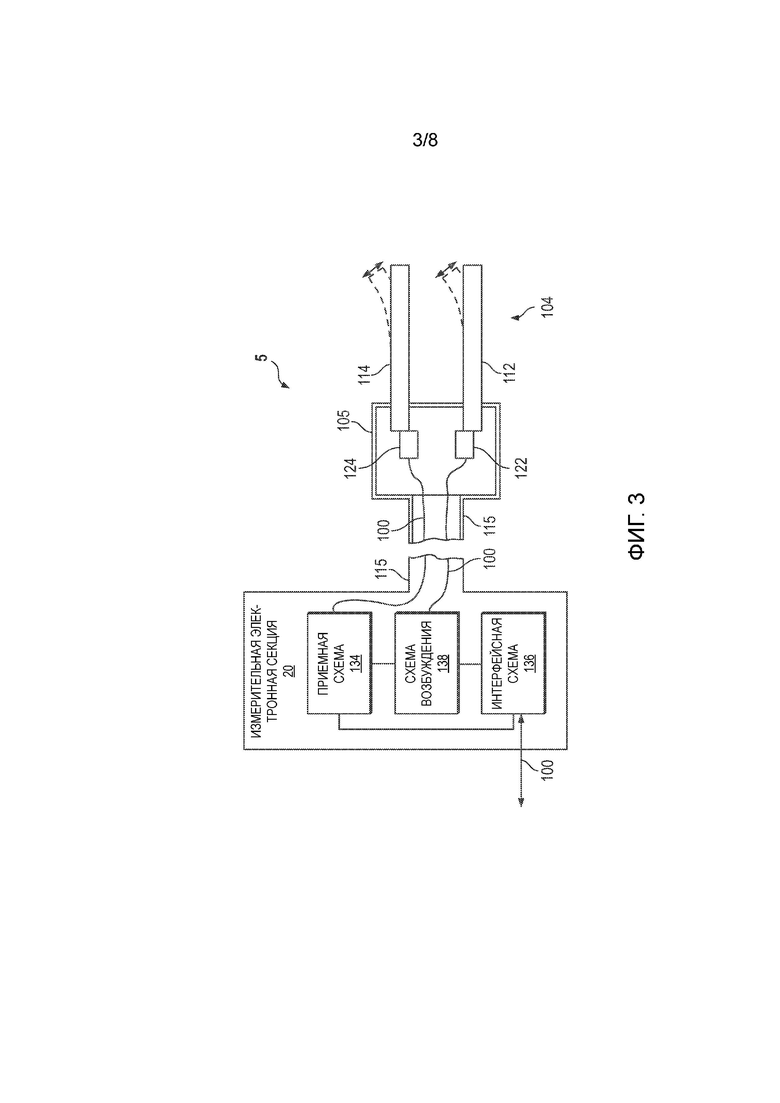
Фиг. 3 представляет вибродатчик 5 в соответствии с вариантом осуществления. В показанном варианте осуществления измерительная электронная секция 20 соединена с колебательным элементом 104 стержнем 115. Стержень 115 может быть любой требуемой длины. Стержень 115 может быть, по меньшей мере, частично полым. Провода или другие проводники могут продолжаться между измерительной электронной секцией 20 и колебательным элементом 104 по стержню 115. Измерительная электронная секция 20 включает в себя схемные компоненты, например, приемную схему 134, интерфейсную схему 136 и схему 138 возбуждения. В показанном варианте осуществления приемная схема 134 и схема 138 возбуждения непосредственно подсоединены к выводам колебательного элемента 104. В качестве альтернативы, измерительная электронная секция 20 может содержать компонент или устройство, отдельный(ое) от колебательного элемента 104, при этом приемная схема 134 и схема 138 возбуждения соединены с колебательным элементом 104 выводом или выводами 100.
В показанном варианте осуществления колебательный элемент 104 вибродатчика 5 содержит камертонную конструкцию, при этом колебательный элемент 104, по меньшей мере, частично погружен в измеряемую текучую среду. Колебательный элемент 104 включает в себя корпус 105, который можно закреплять к другой конструкции, например, трубе, трубопроводу, баку, резервуару, распределительному трубопроводу или любой другой конструкции для транспортировки текучей среды. Корпус 105 удерживает колебательный элемент 104, тогда как колебательный элемент 104 остается, по меньшей мере, частично открытым. Поэтому колебательный элемент 104 выполнен с возможностью погружения в текучую среду.
Колебательный элемент 104 в показанном варианте осуществления включает в себя первый и второй зубья 112 и 114, которые выполнены с возможностью, по меньшей мере, частичного продолжения в текучую среду. Первый и второй зубья 112 и 114 содержат удлиненные элементы, которые могут иметь любую требуемую форму поперечного сечения. Первый и второй зубья 112 и 114 могут быть, по меньшей мере, частично гибкими или упругими по своему характеру. Вибродатчик 5 дополнительно включает в себя соответствующие первый и второй пьезоэлементы 122 и 124, которые содержат пьезоэлектрические кристаллические элементы. Первый и второй пьезоэлементы 122 и 124 расположены, соответственно, рядом с первым и вторым зубьями 112 и 114. Первый и второй пьезоэлементы 122 и 124 выполнены с возможностью контакта и механического взаимодействия с первым и вторым зубьями 112 и 114.
Первый пьезоэлемент 122 находится в контакте с, по меньшей мере, участком первого зуба 112. Первый пьезоэлемент 122 также имеет электрическое соединение со схемой 138 возбуждения. Схема 138 возбуждения подает генерируемый сигнал возбуждения в первый пьезоэлемент 122. Первый пьезоэлемент 122 растягивается и сокращается под действием генерируемого сигнала возбуждения. В результате, первый пьезоэлемент 122 может попеременно деформироваться и смещать первый зуб 112 из стороны в сторону в колебательном движении (смотри штриховые линии), что создает периодическое, возвратно-поступательное возмущение текучей среды.
Второй пьезоэлемент 124 показан соединенным с приемной схемой 134, которая формирует колебательный сигнал, соответствующий деформациям второго зуба 114 в текучей среде. Перемещение второго зуба 114 вызывает генерацию соответствующего электрического колебательного сигнала посредством второго пьезоэлемента 124. Второй пьезоэлемент 124 передает колебательный сигнал в измерительную электронную секцию 20. Измерительная электронная секция 20 включает в себя интерфейсную схему 136.
Интерфейсная схема 136 может быть выполнена с возможностью обмена сигналами с внешними устройствами. Интерфейсная схема 136 передает сигнал или сигналы измеренных колебаний и может передавать найденные характеристики текучей среды в одно или более внешних устройств. Измерительная электронная секция 20 может передавать через интерфейсную схему 136 характеристики колебательного сигнала, например, частоту колебательного сигнала и амплитуду колебательного сигнала для колебательного сигнала. Измерительная электронная секция 20 может передавать через интерфейсную схему 136 результаты измерения текучей среды, например, плотность и/или вязкость текучей среды, среди прочего. Другие результаты измерения текучей среды также предполагаются и не выходят за пределы объема описания и формулы изобретения. Дополнительно, интерфейсная схема 136 может принимать передачи из внешних устройств, в том числе, например, команды и данные для формирования значений измерения. В некоторых вариантах осуществления приемная схема 134 соединена со схемой 138 возбуждения, при этом приемная схема 134 подает колебательный сигнал в схему 138 возбуждения.
Схема 138 возбуждения генерирует сигнал возбуждения для колебательного элемента 104. Схема 138 возбуждения может модифицировать характеристики генерируемого сигнала возбуждения. Схема 138 возбуждения включает в себя разомкнутый контур возбуждения. Разомкнутый контур возбуждения может служить схеме 138 возбуждения для генерации сигнала возбуждения и подачи генерируемого сигнала возбуждения в колебательный элемент 104 (например, первый пьезоэлемент 122). В некоторых вариантах осуществления разомкнутый контур возбуждения генерирует сигнал возбуждения, чтобы обеспечивать целевую разность фаз φt, начиная с исходной частоты ωi. Разомкнутый контур возбуждения может функционировать без опоры на обратную связь по колебательному сигналу, как подробно описано в дальнейшем со ссылкой на фиг. 4.
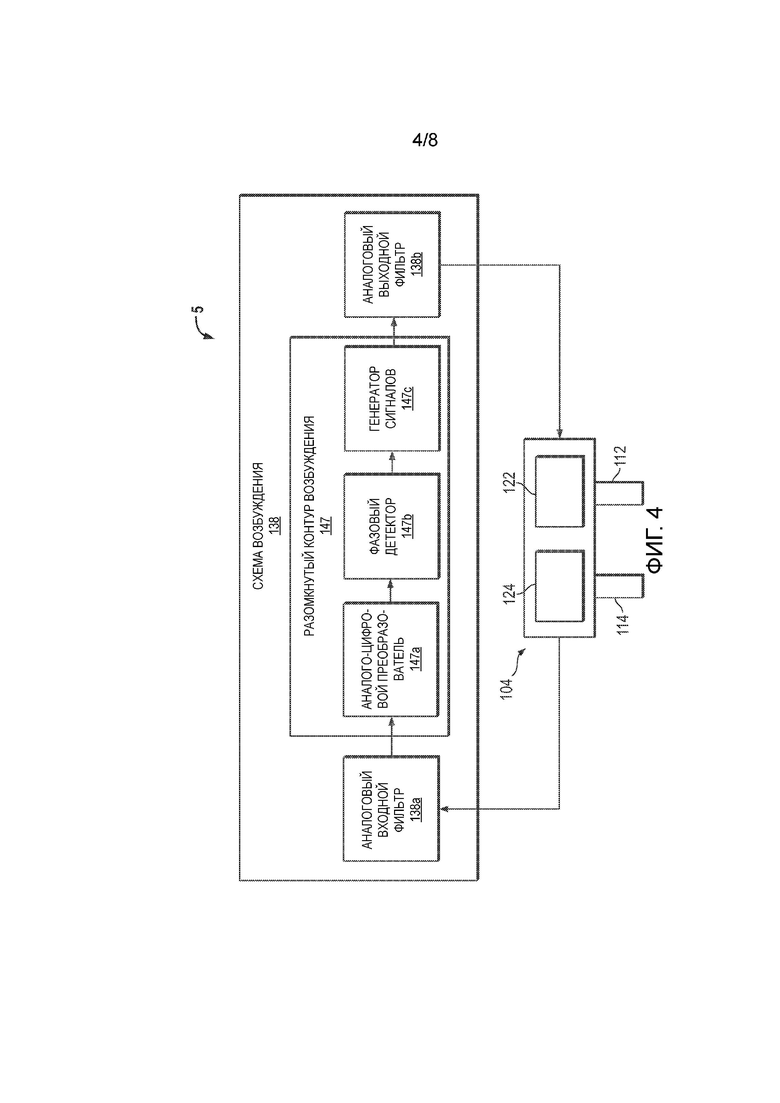
Фиг. 4 является блок-схемой вибродатчика 5 с более детальным представлением схемы 138 возбуждения. Вибродатчик 5 изображен со схемой 138 возбуждения. Приемная схема 134 и интерфейсная схема 136 не показаны для ясности. Схема 138 возбуждения включает в себя аналоговый входной фильтр 138a и аналоговый выходной фильтр 138b, которые соединены с разомкнутым контуром 147 возбуждения. Аналоговый входной фильтр 138a фильтрует колебательный сигнал, и аналоговый выходной фильтр 138b фильтрует генерируемый сигнал возбуждения.
Разомкнутый контур 147 возбуждения включает в себя аналого-цифровой преобразователь 147a, который соединен с фазовым детектором 147b. Фазовый детектор 147b соединен с генератором 147c сигналов. Показан также колебательный элемент 104, который включает в себя первый пьезоэлемент 122 и второй пьезоэлемент 124. Разомкнутый контур 147 возбуждения может быть реализован цифровым сигнальным процессором, который выполнен с возможностью выполнения одного или более кодов или программ, которые дискретизируют, обрабатывают и генерируют сигналы. Дополнительно или в качестве альтернативы, разомкнутый контур 147 возбуждения может быть реализован электронной схемой, соединенной с цифровым сигнальным процессором, или подобным образом.
Колебательный сигнал, обеспечиваемый первым пьезоэлементом 122, посылается в аналоговый входной фильтр 138a. Аналоговый входной фильтр 138a фильтрует колебательный сигнал до дискретизации колебательного сигнала в аналого-цифровом преобразователе 147a. В показанном варианте осуществления аналоговый входной фильтр 138a может состоять из фильтра нижних частот с частотой среза, которая приблизительно равна половиной частоте дискретизации разомкнутого контура возбуждения 147, хотя возможно применение любого подходящего фильтра нижних частот. Фильтр нижних частот может быть обеспечен с помощью таких пассивных компонентов, как катушка индуктивности, конденсатор и резистор, хотя возможно применение любых подходящих компонентов, распределенных или дискретных, например, фильтра операционного усилителя.
Аналого-цифровой преобразователь 147a может дискретизировать фильтрованный колебательный сигнал, чтобы формировать дискретизированный колебательный сигнал. Аналого-цифровой преобразователь 147a может также дискретизировать генерируемый сигнал возбуждения во втором канале (не показанном). Дискретизация может выполняться любым подходящим способом дискретизации. Как можно понять, генерируемый сигнал возбуждения, дискретизированный аналого-цифровым преобразователем 147a, не содержит шумов, связанных с колебательным сигналом. Генерируемый сигнал возбуждения подается в фазовый детектор 147b.
Фазовый детектор 147b может сравнивать фазы дискретизированных колебательного сигнала и генерируемого сигнала возбуждения. Фазовый детектор 147b может быть процессором, выполненным с возможностью выполнения одного или более кодов или программ, которые дискретизируют, обрабатывают и генерируют сигналы, чтобы определять разность фаз между двумя сигналами, как подробно описано в дальнейшем со ссылкой на фиг. 5. В варианте осуществления, показанном на фиг. 4, сравнение обеспечивает измеренную разность φm фаз между дискретизированным колебательным сигналом и дискретизированным генерируемым сигналом возбуждения.
Измеренная разность φm фаз сравнивается с целевой разностью φt фаз. Целевая разность φt фаз является требуемой разностью фаз между колебательным сигналом и генерируемым сигналом возбуждения. Например, в варианте осуществления, в котором целевая разность φt фаз приблизительно равна 45°, разность между измеренной разностью φm фаз и целевой разностью φt фаз может равняться нулю, если измеренная разность φm фаз является точно или приблизительно такой же, как 45°. Однако, в альтернативных вариантах осуществления можно использовать любую подходящую целевую разность φt фаз. С помощью сравнения между измеренной разностью φm фаз и целевой разностью φt фаз, фазовый детектор 147b может генерировать управляющую частоту ωc.
Управляющая частота ωc может применяться для генерации сигнала возбуждения. Дополнительно или в качестве альтернативы, можно применять исходную частоту ωi, которая не определяется в результате сравнения между измеренной разностью φm фаз и целевой разностью φt фаз. Исходная частота ωi может быть предварительно выбранной частотой, используемой для формирования исходного генерируемого сигнала возбуждения. Исходный генерируемый сигнал возбуждения может дискретизироваться, как описано выше, и сравниваться с дискретизированным колебательным сигналом. Сравнение между дискретизированным исходным генерируемым сигналом возбуждения и дискретизированным колебательным сигналом может служить для генерации управляющей частоты ωc. Управляющая частота ωc и исходная частота ωi могут представляться в таких единицах измерения, как радианы в секунду, хотя возможно применение любых подходящих единиц, например, Герц (Гц). Управляющая частота ωc или исходная частота ωi могут подаваться в генератор 147c сигналов.
Генератор 147c сигналов может принимать управляющую частоту ωc из фазового детектора 147b и обеспечивать генерируемый сигнал возбуждения с частотой, которая является точно такой же, как управляющая частота ωc. Генерируемый сигнал возбуждения может посылаться, как описано выше, в аналого-цифровой преобразователь 147a. Генерируемый сигнал возбуждения посылается также в первый пьезоэлемент 122 через аналоговый выходной фильтр 138b. Дополнительно или в качестве альтернативы, генерируемый сигнал возбуждения может посылаться в другие компоненты в других вариантах осуществления.
Как описано выше, колебательный элемент 104 дает колебательный отклик, вызванный сигналом возбуждения. Колебательный отклик имеет такие параметры колебательного отклика, как резонансная частота ω0, добротность Q и т.п., которые можно использовать для вычисления различных свойств измеряемой текучей среды. Колебательный отклик и примерные параметры колебательного отклика, а также методы возможного использования параметров колебательного отклика для вычисления свойств текучей среды подробно описаны в дальнейшем.
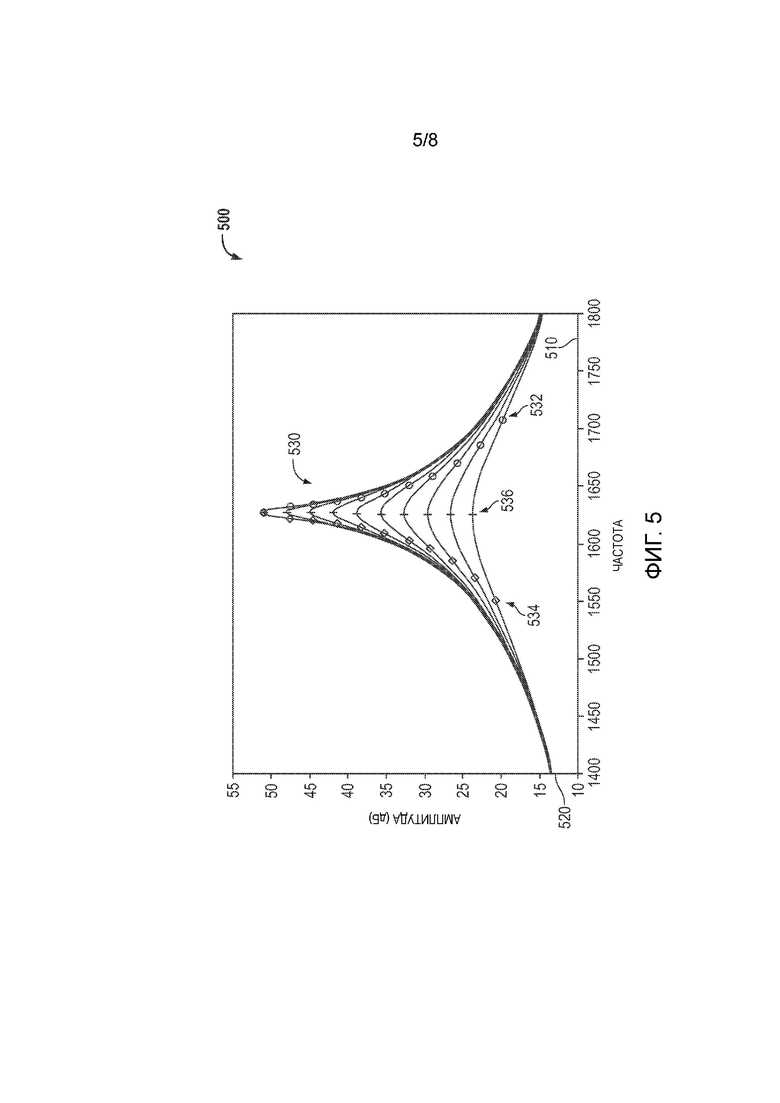
Фиг. 5 представляет график 500 амплитудно-частотных характеристик, поясняющий колебательный отклик колебательного элемента. График 500 амплитудно-частотных характеристик включает в себя ось 510 частот и ось 520 амплитуд. Ось 510 частот представлена единицами измерения Гц, хотя возможно применение любой подходящей единицы измерения частоты, например, радиан в секунду. Ось 520 амплитуд представлена шкалой децибел (дБ). Ось 520 амплитуд может быть установлена в любых подходящих единицах, например, Вольтах или Амперах. График 500 амплитудно-частотных характеристик включает в себя также кривые 530 амплитудно-частотных характеристик. Кривые 530 амплитудно-частотных характеристик могут представлять колебательные отклики колебательного элемента 104, описанного выше, хотя в альтернативных вариантах осуществления возможно применение любого колебательного элемента.
Как показано на фиг. 5, кривые 530 амплитудно-частотных характеристик состоят из отдельных кривых амплитудно-частотных характеристик для текучих сред с разными свойствами демпфирования колебаний. Например, кривая с наименьшей амплитудой на резонансной частоте может быть самой уплощенной вследствие погружения колебательного элемента 104 в вязкую и плотную текучую среду. Кривая с наибольшей амплитудой на резонансной частота может быть наименее плоской вследствие погружения колебательного элемента в текучую среду с пониженной вязкостью в сравнении с текучими средами, соответствующими другим кривым среди кривых 530 амплитудно-частотных характеристик. Как можно понять, каждая из кривых 530 амплитудно-частотных характеристик имеет разные соответствующие параметры колебательного отклика.
Например, в показанном варианте осуществления на фиг. 5, каждая из кривых 530 амплитудно-частотных характеристик имеет три маркера, которые указывают на первую нерезонансную частоту ω1, вторую нерезонансную частоту ω2 и резонансную частоту ω0, которые являются параметрами колебательного отклика для колебательного отклика. Первая нерезонансная частота ω1 указана первым нерезонансным маркером 532. Вторая нерезонансная частота ω2 указана вторым нерезонансным маркером 534. Резонансная частота ω0 указана резонансным маркером 536. Как можно оценить из рассмотрения резонансных маркеров 536, резонансная частота ω0 является по существу одной и той же для каждой из кривых 530 амплитудно-частотных характеристик.
В некоторых вариантах осуществления резонансную частоту ω0 можно определять по первой нерезонансной частоте ω1 и второй нерезонансной частоте ω2. Например, резонансную частоту ω0 можно определять по среднему значению из первой нерезонансной частоты ω1 и второй нерезонансной частоты ω2:
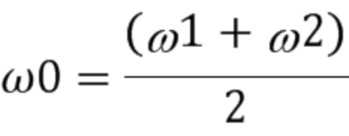 . (1)
. (1)
Однако, в альтернативных вариантах осуществления резонансную частоту ω0 можно определять другими способами, например, путем измерения частоты при пиковой амплитуде, по мере качания по диапазону частот.
Добротность Q можно определять по первой нерезонансной частоте ω1, второй нерезонансной частоте ω2 и резонансной частоте ω0. Например, добротность Q можно определять из уравнения:
 . (2)
. (2)
Как можно понять, добротность Q отличается для каждой кривой. Добротность Q может быть разной для каждой из кривых 530 амплитудно-частотных характеристик по различным причинам, например, наличия у текучей среды, соответствующей каждой из кривых 530 амплитудно-частотных характеристик, отличающейся вязкости или плотности.
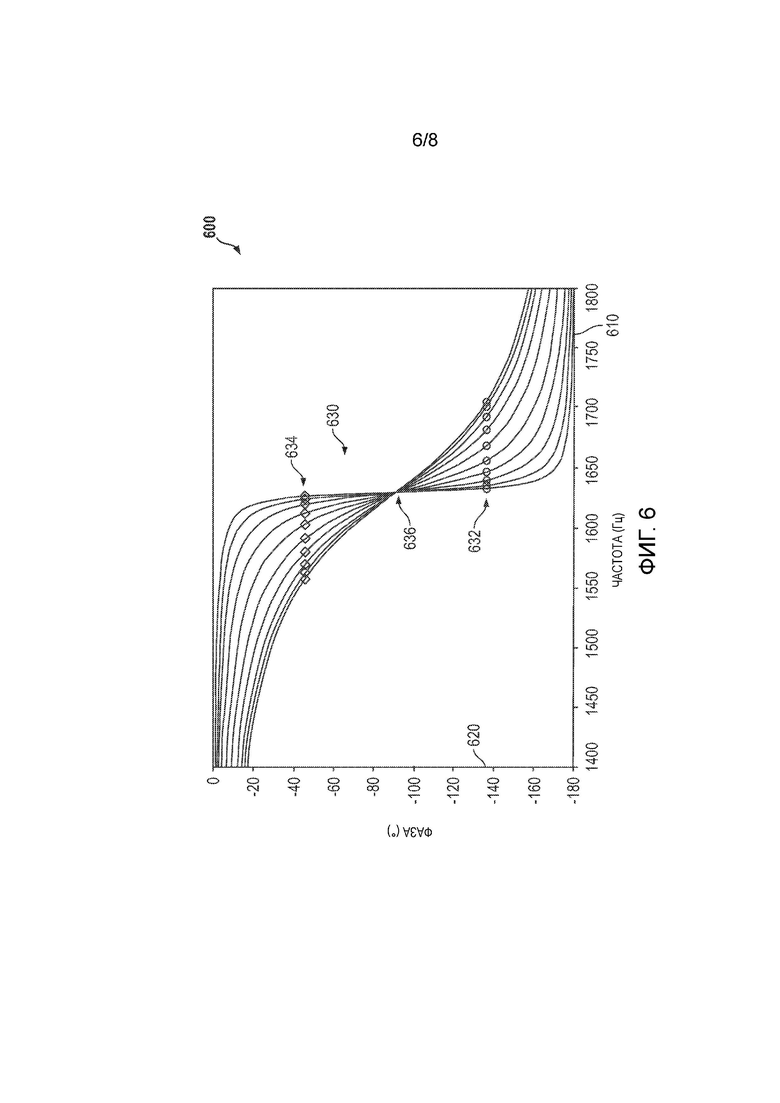
Фиг. 6 представляет график 600 фазово-частотных характеристик, поясняющий колебательный отклик колебательного элемента. Колебательный элемент может быть колебательным элементом 104, описанным выше со ссылкой на фиг. 2-4, хотя возможно применение любого подходящего колебательного элемента. График 600 фазово-частотных характеристик включает в себя ось 610 частот, которая является абсциссой графика 600 фазово-частотных характеристик. График 600 фазово-частотных характеристик включает в себя также ось 620 разностей фаз, которая является ординатой графика 600 фазово-частотных характеристик. График 600 фазово-частотных характеристик включает в себя кривые 630 фазово-частотных характеристик для текучих сред с разными вязкостями. Каждая из кривых 630 фазово-частотных характеристик содержит первый нерезонансный маркер 632 и второй нерезонансный маркер 634. Показан также резонансный маркер 636 каждой из кривых 630 фазово-частотных характеристик.
Каждая из кривых 630 фазово-частотных характеристик иллюстрирует зависимость между частотой колебательного сигнала и разностью фаз между колебательным сигналом и сигналом возбуждения. Частоты первого и второго нерезонансных маркеров 632, 634 различаются для каждой из кривых 630 фазово-частотных характеристик. Как показано, первые нерезонансные маркеры 632 при -135 градусах находятся в диапазоне от приблизительно 1630 Гц до приблизительно 1715 Гц. Вторые нерезонансные маркеры 634 при -45 градусах находятся в диапазоне от приблизительно 1560 Гц до приблизительно 1620 Гц.
Как можно понять, зависимость между разностью фаз и частотой является приблизительно линейной между первым и вторым нерезонансными маркерами 632, 634. Поэтому, функциональную зависимость между частотой и разностью фаз можно установить, если две или более разностей фаз измеряются на их соответствующих частотах. Функциональную зависимость можно использовать для определения фазового рассогласования между заданной разностью φt фаз и измеренной разностью φm фаз, как описано выше со ссылкой на фиг. 4. Как подробно описано в дальнейшем, фазовое рассогласование можно использовать для вычисления одной или более составляющих управления колебаниями для контура управления.
Фиг. 7 представляет способ 700 управления колебаниями в колебательном элементе по фазовому рассогласованию. Колебательный элемент может быть колебательным элементом 104, описанным выше со ссылкой на фиг. 2-4, хотя в альтернативных вариантах осуществления возможно использование любого подходящего колебательного элемента. Способ 700 начинается с приведения колебательного элемента в колебательное движение с помощью сигнала возбуждения на этапе 710. Сигнал возбуждения может генерироваться, например, схемой 138 возбуждения, описанной со ссылкой на фиг. 4.
На этапе 720 способа 700 колебательный сигнал принимается из колебательного элемента. В способе 700 сигнал может приниматься, например, измерительной электронной секцией 20. В частности, способ 700 может быть программой, которая выполняется в измерительной электронной секции 20, чтобы назначить приемной схеме 134 задание принимать колебательный сигнал, передаваемый по выводам 100, показанным на фиг. 3.
На этапе 730 способа 700 может измеряться разность φm фаз между сигналом возбуждения и колебательным сигналом. В способе 700 разность φm фаз может измеряться, например, фазовым детектором 147b, хотя для измерения разности φm фаз можно применить любое подходящее средство. На этапе 740 можно определять фазовое рассогласование между целевой разностью φt фаз и измеренной разностью φm фаз. Фазовое рассогласование можно определять, например, посредством вычисления разности между целевой разностью φt фаз и измеренной разностью φm фаз.
На этапе 750 способа 700 может вычисляться одна или более составляющих управления колебаниями по найденному фазовому рассогласованию. Составляющие управления колебаниями могут быть составляющими, используемыми, например, в контуре управления, который управляет колебаниями колебательного элемента. Например, способ 700 может применяться в схеме возбуждения, например, вышеописанном разомкнутом контуре 147 возбуждения. Соответственно, в способе 700 можно приводить колебательный элемент в колебательное движение на частоте, которая вычисляется по найденному фазовому рассогласованию, как подробно описано в дальнейшем.
Фиг. 8 представляет другой способ 800 управления колебаниями в колебательном элементе по фазовому рассогласованию. Колебательный элемент может быть колебательным элементом 104, описанным выше со ссылкой на фиг. 2-4, хотя возможно использование любого подходящего колебательного элемента. Способ 800 начинается на этапе 810 с генерации сигнала возбуждения. Сигнал возбуждения может генерироваться генератором 147c сигналов, описанным со ссылкой на фиг. 4. На этапе 820 способа 800 может выполняться приведение колебательного элемента в колебательное движение с помощью сигнала возбуждения. Например, в соответствии с вариантом осуществления, показанным на фиг. 8, в способе 800 генератору 147c может быть задано подавать сигнал возбуждения в колебательный элемент 104 через аналоговый выходной фильтр 138b.
На этапе 830 способа 800 измеряется разность фаз между сигналом возбуждения и колебательным сигналом из колебательного элемента. На этапе 840 способа 800 может вычисляться одна или более составляющих управления колебаниями для контура управления. На этапе 850 способа 800 может вычисляться коэффициент усиления по одной или более составляющих управления колебаниями. На этапе 860 способа 800 может вычисляться частота сигнала возбуждения с помощью контура управления. Способ 800 показан закольцованным на этап 810, чтобы генерировать сигнал возбуждения, который может иметь частоту, вычисленную на этапе 860.
В способах 700, 800 вышеописанные этапы могут выполняться, например, посредством выполнения программы системы программного обеспечения в измерительной электронной секции 20. В вышеописанных способах 700, 800 могут выполняться измерение разности фаз между сигналом возбуждения и колебательным сигналом, определение фазового рассогласования между заданной разностью φt фаз и измеренной разностью φm фаз и вычисление одной или более составляющих управления колебаниями по найденному фазовому рассогласованию. Упомянутые и другие этапы подробно описаны в дальнейшем.
Фазовое рассогласование между сигналом возбуждения и колебательным сигналом можно измерять различными способами. Например, фазовое рассогласование можно измерять дискретизацией сигнала возбуждения и колебательного сигнала с помощью аналого-цифрового преобразователя 147a. Фазовый детектор 147b может обнаруживать точки перехода через нуль сигнала возбуждения и колебательного сигнала. Точки перехода через нуль могут быть моментами времени, в которые сигнал возбуждения и колебательный сигнал равен или приблизительно равен нулю Вольт в аналоговой форме или с цифровым кодированием. Фазовое рассогласование между точками перехода через нуль сигнала возбуждения и колебательного сигнала может умножаться на частоту сигнала возбуждения или колебательного сигнала, чтобы вычислить измеренную разность φm фаз. Однако, возможно применение любого подходящего средства измерения фазового рассогласования между сигналом возбуждения и колебательным сигналом.
Фазовое рассогласование можно определять по измеренной разности φm фаз. Фазовое рассогласование может быть равным отношению разности между целевой разностью φt фаз и измеренной разностью φm фаз к целевой разности φt фаз. Соответственно, разность между целевой разностью φt фаз и измеренной разностью φm фаз может нормироваться относительно целевой разности φt фаз. Например, измерительная электронная секция 20 может выполнять способы 700, 800, чтобы вычислять фазовое рассогласование с использованием уравнения:
(3)
В приведенных и других вариантах осуществления найденное фазовое рассогласование можно использовать для вычисления одной или более составляющих управления колебаниями. Например, фазовое рассогласование можно умножать на значение, например, предварительно заданной постоянной величины, чтобы вычислить одну из составляющих управления колебаниями.
Составляющие управления колебаниями можно использовать в контуре управления, который формирует коэффициент усиления. Например, контур управления может складывать одну или более составляющих управления колебаниями, чтобы формировать коэффициент усиления. Коэффициент усиления может использоваться для управления колебаниями колебательного элемента, например, колебательного элемента 104, описанного выше со ссылкой на фиг. 1. Например, коэффициент усиления можно использовать для доведения колебательного элемента до первой или второй разностей φ1, φ2 фаз нерезонансных колебаний.
При доведении колебательного элемента до первой или второй разностей φ1, φ2 фаз нерезонансных колебаний, фазовое рассогласование между измеренной разностью φm фаз и целевой разностью φt фаз уменьшается. То есть, целевая разность φt фаз может быть одной из первой или второй разностей φ1, φ2 фаз нерезонансных колебаний. Уменьшенное фазовое рассогласование можно использовать для вычисления соответствующих составляющих управления колебаниями для контура управления. Соответственно, контур управления может инкрементным методом уменьшать коэффициент усиления, вычисленный контуром управления в ходе инкрементной процедуры по мере того, как измеренная разность φm фаз приближается к целевой разности φt фаз.
Контур управления может быть контуром пропорционально-интегрального управления с составляющими управления колебаниями, которые вычисляются по найденному фазовому рассогласованию. В варианте осуществления контур пропорционально-интегрального управления может включать в себя, например, сумму составляющей пропорционального усиления и интегральную составляющую. В некоторых вариантах осуществления контур пропорционально-интегрального управления описывается уравнением, в котором найденное фазовое рассогласование умножается на постоянный пропорциональный коэффициент Kp усиления и постоянный коэффициент Ki интегральной составляющей, как подробно поясняется в дальнейшем.
Составляющая пропорционального усиления может равняться постоянному пропорциональному коэффициенту Kp усиления, умноженному на найденное фазовое рассогласование. В варианте осуществления составляющую пропорционального усиления можно вычислить из уравнения:
 (4)
(4)
Фазовое рассогласование в уравнении может быть найденным фазовым рассогласованием. Например, фазовое рассогласование в уравнении можно определять по измеренной разности φm фаз, когда сигнал возбуждения и колебательный сигнал принимаются из колебательного элемента 104.
Составляющая пропорционального усиления может использоваться в контуре пропорционально-интегрального управления. Соответственно, выходной сигнал контура пропорционально-интегрального управления может быть связан с найденным фазовым рассогласованием. Соответственно, чем больше разность между измеренной разностью φm фаз и целевой разностью φt фаз, тем выше выходной сигнал из контура пропорционально-интегрального управления. Поэтому, большие найденные фазовые рассогласования дают, в результате, составляющую пропорционального усиления, соответственно большую относительно масштаба, заданного постоянным пропорциональным коэффициентом Kp усиления.
Контур пропорционально-интегрального управления может также включать в себя интегральную составляющую. Интегральная составляющая может равняться постоянному коэффициенту Ki интегральной составляющей, умноженному на найденное фазовое рассогласование. Кроме того, интегральная составляющая может также включать в себя другие найденные фазовые рассогласования. Например, как описано выше, фазовое рассогласование можно определять итерационным методом. Соответственно, чтобы определить нынешнюю интегральную составляющую для контура пропорционально-интегрального управления, постоянный коэффициент Ki интегральной составляющей можно умножать на нынешнее фазовое рассогласование и одно или более предыдущих фазовых рассогласований.
Например, в способах 700, 800 может выполняться сохранение одного или более предыдущих фазовых рассогласований в измерительной электронной секции 20. Одно или более предыдущих фазовых рассогласований могут быть получены по способам 700, 800, умножены на постоянный коэффициент Ki интегральной составляющей и прибавлены к интегральной составляющей, вычисленной по нынешнему фазовое рассогласование. Нынешнее фазовое рассогласование может быть фазовым рассогласованием, найденным по измеренной разности φm фаз и целевой разности φt фаз, когда измеренная разность φm фаз принимается измерительной электронной секцией 20.
В другом примере, в способах 700, 800 может выполняться сохранение одной или более предыдущих измеренных разностей φm фаз в измерительной электронной секции 20. В способах 700, 800 могут осуществляться получение одной или более предыдущих измеренных разностей φm фаз и вычисление одного или более предыдущих фазовых рассогласований, которые соответствуют одной или более предыдущих измеренных разностей φm фаз. Одно или более предыдущих фазовых рассогласований могут умножаться на постоянный коэффициент Ki интегральной составляющей и затем прибавляться к нынешней интегральной составляющей. Нынешняя интегральная составляющая может определяться, когда измерительная электронная секция 20 принимает измеренную разность φm фаз по выводам 100.
В варианте осуществления можно использовать одну предыдущую интегральную составляющую. То есть, нынешнее фазовое рассогласование умножается на постоянный коэффициент Ki интегральной составляющей и затем прибавляется к одной интегральной составляющей, которая, например, сохранена в измерительной электронной секции 20. В варианте осуществления интегральная составляющая может быть вычислена по уравнению:
 (5)
(5)
Фазовое рассогласование в правой части уравнения (5) может быть нынешним найденным фазовым рассогласованием, которое вычислено по данной измеренной разности φm фаз, когда сигнал возбуждения и колебательный сигнал принимаются измерительной электронной секцией 20. Интегральная составляющая в правой части уравнения (5) может быть предыдущей интегральной составляющей, которая вычислена по предыдущему фазовому рассогласованию. Поэтому интегральная составляющая в левой части уравнения (5) может быть нынешней интегральной составляющей.
Нынешняя интегральная составляющая может быть сохранена согласно способам 700, 800 в измерительной электронной секции 20 для последующих итераций контура управления. Например, интегральная составляющая в левой части уравнения (5) может сохраняться в измерительной электронной секции 20, чтобы последующее вычисление уравнения (5) могло использовать сохраненную интегральную составляющую в правой части уравнения (5). В альтернативных вариантах осуществления могут применяться другие способы вычисления составляющих управления колебаниями.
В способах 700, 800 могут также выполняться генерация управляющей частоты ωc по найденному фазовому рассогласованию и подача управляющей частоты ωc в генератор сигналов, который выполнен с возможностью генерации сигнала возбуждения, который приводит колебательный элемент в колебательное движение на управляющей частоте ωc. В соответствии с вариантом осуществления, управляющая частота ωc генерируется с использованием интегральной составляющей и составляющей пропорционального усиления. Управляющая частота ωc может генерироваться с использованием интегральной составляющей и составляющей пропорционального усиления посредством суммирования интегральной составляющей и составляющей пропорционального усиления по уравнению:
 (6)
(6)
Как можно понять, управляющая частота ωc может генерироваться вышеописанной измерительной электронной секцией 20, хотя в альтернативных вариантах осуществления возможно применение любой измерительной электронной секции. Соответственно, измерительная электронная секция 20 может быть выполнена с возможностью генерации управляющей частоты ωc по найденному фазовому рассогласованию и подачи управляющей частоты ωc в генератор 147c сигналов, который выполнен с возможностью генерации сигнала возбуждения, который приводит колебательный элемент 104 в колебательное движение на управляющей частоте ωc. В альтернативных вариантах осуществления возможно применение других конфигураций.
Вышеописанные варианты осуществления обеспечивают способ 700, 800 и измерительную электронную секцию 20 для управления колебаниями колебательного элемента 104 по найденному фазовому рассогласованию. Как поясняется выше, способ 700, 800 и измерительная электронная секция 20 могут обеспечивать коэффициент усиления возбуждения, который базируется на найденном фазовом рассогласовании. Поэтому коэффициент усиления возбуждения является большим, когда рассогласование является значительным, и небольшим, когда рассогласование является незначительным. Поэтому коэффициент усиления возбуждения вызывает ускоренное приближение сигнала возбуждения к первой и второй нерезонансным частотам ω1, ω2. Соответственно, можно быстрее измерять вязкость и плотность измеряемого материала. Кроме того, поскольку коэффициент усиления возбуждения является небольшим, когда рассогласование является незначительным, то сигнал возбуждения может быть стабильным, когда сигнал возбуждения имеет первую и вторую нерезонансные частоты ω1, ω2.
Подробные описания вышеприведенных вариантов осуществления не являются исчерпывающими описаниями всех вариантов осуществления, которые, как предполагают авторы изобретения, находятся в пределах объема настоящего описания. Действительно, специалисты в данной области техники обнаружат, что некоторые элементы вышеописанных вариантов осуществления можно различным образом объединять или исключать, чтобы создать дополнительные варианты осуществления, и такие дополнительные варианты осуществления находятся не выходят за пределы объема и принципов настоящего описания. Специалистам со средним уровнем компетентности в данной области техники будет также понятно, что вышеописанные варианты осуществления можно объединять целиком или частично для создания дополнительных вариантов осуществления в пределах объема и принципов настоящего описания.
Таким образом, хотя в настоящем описании представлены конкретные варианты осуществления с целью иллюстрации, в пределах объема настоящего описания возможны различные эквивалентные модификации, как будет очевидно специалистам в данной области техники. Принципы, предложенные в настоящем описании, можно применить к другим способам и устройствам для управления колебаниями вибродатчика по фазовому рассогласованию, а не только к вариантам осуществления, описанным выше и показанным на прилагаемых фигурах. Соответственно, объем вышеописанных вариантов осуществления должен определяться нижеследующей формулой изобретения.
Предложен способ управления колебаниями колебательного элемента на основании фазового рассогласования. Способ включает в себя приведение колебательного элемента в колебательное движение с помощью сигнала возбуждения, прием колебательного сигнала из колебательного элемента, измерение разности фаз между сигналом возбуждения и колебательным сигналом, определение фазового рассогласования между целевой разностью фаз и измеренной разностью фаз и вычисление одной или более составляющих управления колебаниями с помощью упомянутого определенного фазового рассогласования. 2 н. и 18 з.п. ф-лы, 8 ил.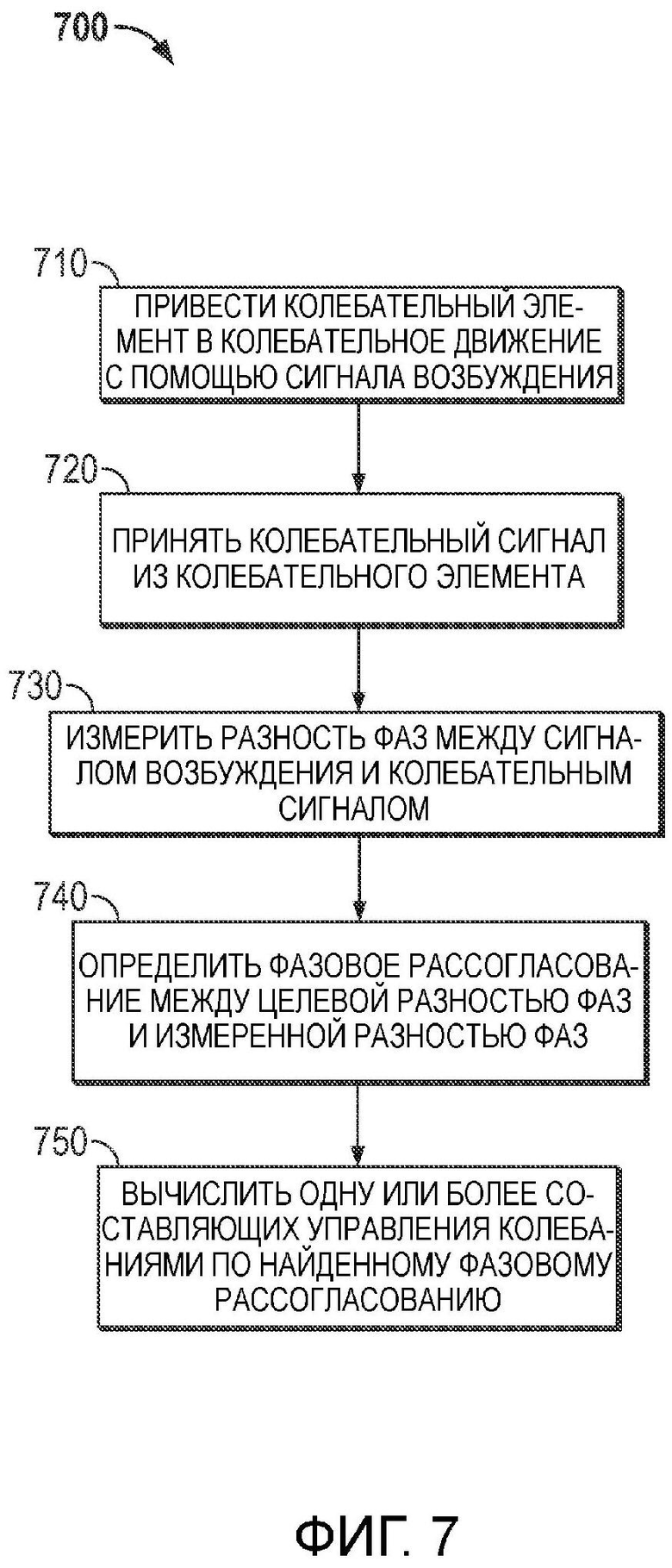
1. Способ управления колебаниями колебательного элемента на основании фазового рассогласования, при этом способ содержит следующие этапы, на которых:
приводят колебательный элемент в колебательное движение с помощью сигнала возбуждения;
принимают колебательный сигнал из колебательного элемента;
измеряют разность фаз между сигналом возбуждения и колебательным сигналом;
определяют фазовое рассогласование между целевой разностью фаз и измеренной разностью фаз; и
вычисляют одну или более составляющих управления колебаниями в контуре управления с помощью умножения одной или более предварительно заданной постоянной величины на упомянутое определенное фазовое рассогласование.
2. Способ по п. 1, в котором одна или более составляющих управления колебаниями является составляющей в контуре пропорционально-интегрального управления.
3. Способ по одному из пп. 1 или 2, в котором этап определения фазового рассогласования содержит вычисление фазового рассогласования по уравнению:

4. Способ по любому из пп. 1-3, в котором одна или более составляющих управления колебаниями является составляющей пропорционального усиления для контура пропорционально-интегрального управления, который принимает упомянутое определенное фазовое рассогласование.
5. Способ по п. 4, в котором составляющая пропорционального усиления вычисляется по уравнению:

где Kp является постоянным коэффициентом пропорционального усиления.
6. Способ по любому из пп. 1-5, в котором одна или более составляющих управления колебаниями является интегральной составляющей для упомянутого контура управления, который принимает упомянутое определенное фазовое рассогласование.
7. Способ по п. 6, в котором интегральная составляющая вычисляется по уравнению:

где Ki является постоянным коэффициентом интегральной составляющей.
8. Способ по любому из пп. 1-7, дополнительно содержащий этап генерации управляющей частоты на основании упомянутого определенного фазового рассогласования и этап подачи управляющей частоты в генератор сигналов, который выполнен с возможностью генерации сигнала возбуждения, который приводит колебательный элемент в колебательное движение на управляющей частоте.
9. Способ по п. 8, в котором управляющая частота генерируется с использованием интегральной составляющей и составляющей пропорционального усиления.
10. Способ по п. 9, в котором управляющая частота генерируется с использованием интегральной составляющей и составляющей пропорционального усиления посредством суммирования интегральной составляющей и составляющей пропорционального усиления по уравнению:
 .
.
11. Измерительная электронная секция (20) для управления колебаниями колебательного элемента (104), при этом измерительная электронная секция (20) содержит:
схему (138) возбуждения, соединенную с колебательным элементом (104), причем схема (138) возбуждения выполнена с возможностью подачи сигнала возбуждения в колебательный элемент (104); и
приемную схему (134), соединенную с колебательным элементом (104), причем приемная схема (134) выполнена с возможностью приема колебательного сигнала из колебательного элемента (104);
причем измерительная электронная секция (20) выполнена с возможностью:
измерения разности фаз между сигналом возбуждения и колебательным сигналом;
определения фазового рассогласования между целевой разностью фаз и измеренной разностью фаз; и
вычисления одной или более составляющих управления колебаниями в контуре управления с помощью умножения одной или более предварительно заданной постоянной величины на упомянутое определенное фазовое рассогласование.
12. Измерительная электронная секция (20) по п. 11, в которой одна или более составляющих управления колебаниями является составляющей в контуре пропорционально-интегрального управления.
13. Измерительная электронная секция (20) по одному из пп. 11 или 12, в которой измерительная электронная секция (20), выполненная с возможностью определения фазового рассогласования, содержит измерительную электронную секцию (20), выполненную с возможностью вычисления фазового рассогласования по уравнению:

14. Измерительная электронная секция (20) по любому из пп. 11-13, в которой одна или более составляющих управления колебаниями является составляющей пропорционального усиления для контура пропорционально-интегрального управления, который принимает упомянутое определенное фазовое рассогласование.
15. Измерительная электронная секция (20) по п. 14, в которой составляющая пропорционального усиления вычисляется по уравнению:

где Kp является постоянным коэффициентом пропорционального усиления.
16. Измерительная электронная секция (20) по любому из пп. 11-15, в которой одна или более составляющих управления колебаниями является интегральной составляющей для упомянутого контура управления, который принимает упомянутое определенное фазовое рассогласование.
17. Измерительная электронная секция (20) по п. 16, в которой интегральная составляющая вычисляется по уравнению:
где Ki является постоянным коэффициентом интегральной составляющей.
18. Измерительная электронная секция (20) по любому из пп. 11-17, в которой измерительная электронная секция (20) дополнительно выполнена с возможностью генерации управляющей частоты (ωc) на основании упомянутого определенного фазового рассогласования и подачи управляющей частоты (ωc) в генератор (147c) сигналов, который выполнен с возможностью генерации сигнала возбуждения, который приводит колебательный элемент (104) в колебательное движение на управляющей частоте (ωc).
19. Измерительная электронная секция (20) по п. 18, в которой управляющая частота (ωc) генерируется с использованием интегральной составляющей и составляющей пропорционального усиления.
20. Измерительная электронная секция (20) по п. 19, в которой управляющая частота (ωc) генерируется с использованием интегральной составляющей и составляющей пропорционального усиления посредством суммирования интегральной составляющей и составляющей пропорционального усиления по уравнению:
.
| WO 2014176122 A1, 30.10.2014 | |||
| WO 2014175902 A1, 30.10.2014 | |||
| ИЗМЕРИТЕЛЬНАЯ ЭЛЕКТРОНИКА И СПОСОБЫ ДЛЯ ГЕНЕРИРОВАНИЯ СИГНАЛА ВОЗБУЖДЕНИЯ ДЛЯ ВИБРАЦИОННОГО РАСХОДОМЕРА | 2006 |
|
RU2376556C1 |
| US 4533346 A1, 06.08.1985 | |||
| US 5223778 A1, 29.06.1993 | |||
| US 20120151637 A1, 14.06.2012. | |||

