Данное изобретение в общем относится к системам сбора данных, и конкретнее - к каротажной системе, спускаемой на тросе, и к способу, предусматривающему динамическое управление подаваемой на нагрузку мощностью, которое основано на модели тросовой системы.
Тросовый каротаж в общем относится к обследованию нефтяных или газовых скважин для определения их геологических, петрофизических или геофизических свойств с помощью электронных измерительных приборов. Электронные приборы вводят в ствол скважины с помощью бронированного стального кабеля, называемого тросом. Измерения, производимые каротажными приборами, прикрепленными к тросу, передают в систему обработки данных, расположенную на поверхности, по электропроводам, находящимся в тросе. Электрические, акустические, ядерные и формирующие изображение инструменты используют для возбуждения формаций и флюидов в стволе скважины, а электронные измерительные приборы затем измеряют характеристики формаций и флюидов. Трос также подает электроэнергию, необходимую для работы каротажных инструментов.
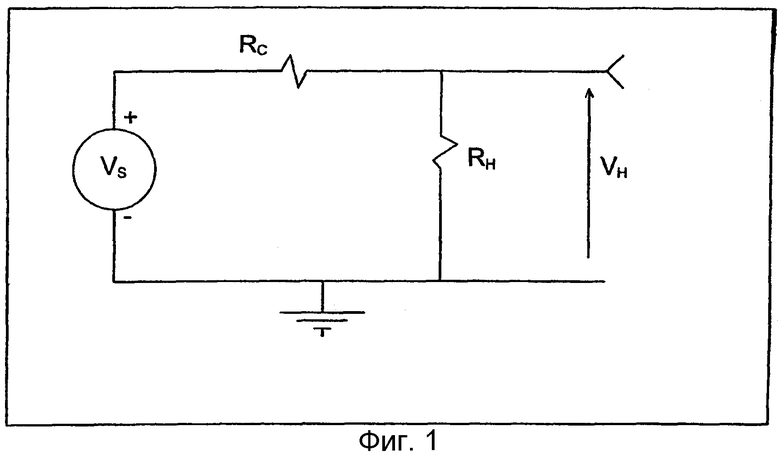
С точки зрения электроэнергии тросовую каротажную систему можно считать электросхемой, имеющей головное сопротивление (Rh) скважинного оборудования (головной части), представляющего собой последовательно подключенные каротажные приборы с элементом полного сопротивления, представляющим сам трос. Фиг.1 иллюстрирует принципиальную схему в случае моделирования троса как простого резистивного элемента. Согласно этой простой модели источник напряжения Vs подает напряжение в последовательную комбинацию сопротивления троса (Rc) и сопротивления (Rh) скважинного оборудования.
Тросовый каротаж управляется следующими параллельными действиями. С одной стороны, желательно довести до максимума мощность, подаваемую в скважинное оборудование, чтобы максимально повысить скорость сбора данных и ускорить обследование в общем. Хорошо известно, что максимальная мощность подается на нагрузку, когда сопротивление троса Rc равно сопротивлению Rh скважинного оборудования, и напряжение в скважинном оборудовании Vh составляет 1/2 напряжения Vs источника питания. В этих условиях напряжение Vh нагрузки изменяется приблизительно на 100%, если сопротивление (Rh) нагрузки изменяется от этого минимального значения до почти разомкнутой цепи, что происходит, когда большие нагрузки отсоединяются и запитываемыми остаются только схемы управления. Это изменение обычно неприемлемо для электронных схем в общем и для систем тросового каротажа, в частности. Поэтому необходимы некоторые средства регулирования напряжения, подаваемого в скважинное оборудование.
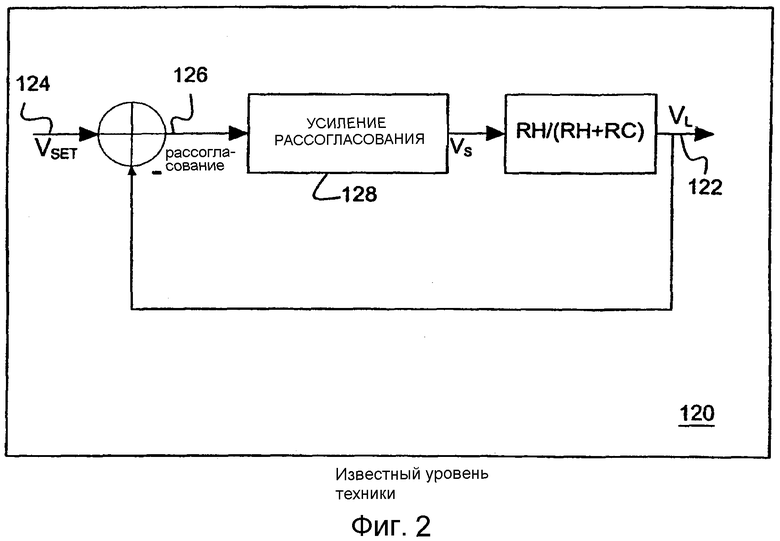
Обращаясь к Фиг.2, показана блок-схема, представляющая обычную систему 120 регулирования напряжения. Система 120 регулирования напряжения сравнивает измеренное значение с напряжением VL нагрузки 122 с заданным напряжением Vset 124 для определения сигнала 126 рассогласования. Сигнал 126 рассогласования характеризует разность между VL 122 и Vset 124. Сигнал 126 рассогласования затем обычно подается на элемент 128 усиления рассогласования. Элемент 128 усиления обычно содержит операционный усилитель и может использовать пропорциональную, интегрирующую и/или дифференцирующую схему в зависимости от конкретного применения. Элемент 128 усиления обычно формирует напряжение VS источника питания из сигнала 126 рассогласования, чтобы обеспечивать VL на нужном уровне (т.е. Vset).
Для обычного регулятора напряжения, такого как система 120, требуется точное измерение напряжения VL нагрузки в целях регулирования напряжения в источнике напряжения. Во многих применениях, когда нагрузка расположена вблизи источника напряжения, обратная подача напряжения нагрузки в схемы регулятора значительных затруднений не представляет. Но в случае тросового каротажа подача напряжения нагрузки обратно в источник нецелесообразна по причине очень большой длины применяемых в известном уровне техники тросов. Даже если бы конструкция троса имела кабель обратной связи для обратной подачи сигнала напряжения нагрузки на поверхность, то в этом случае характерные для кабеля обратной связи потери и задержка значительно ухудшили бы сигнал нагрузки. Соответственно, было бы очень желательно обеспечить такую систему регулирования напряжения, которую было бы целесообразно применить в тросовом каротаже и в других применениях, отличающихся большими расстояниями между нагрузкой и регулятором напряжения. Такая система предпочтительно должна обеспечивать возможность работы троса с максимальной, или почти максимальной, пропускной способностью по мощности, при этом сводя к минимуму изменение напряжения на входе запитываемых электронных схем. Также желательно, чтобы связанное с этим техническое решение не повлияло значительно на повышение себестоимости или усложнило бы работу тросового каротажа.
Задачи и преимущества предлагаемого изобретения поясняются в приведенном ниже подробном описании со ссылкой на прилагаемые чертежи, на которых показано:
Фиг.1 - принципиальная схема резистивной модели системы тросового каротажа;
Фиг.2 - схематическое изображение электрической системы, использующей механизм регулирования напряжения для регулирования напряжения нагрузки согласно известному уровню техники;
Фиг.3 - модель системы тросового каротажа, имеющая элемент передающей линии, являющийся тросом;
Фиг.4 - схематическое изображение системы передающей линии передачи согласно одному из вариантов осуществления изобретения;
Фиг.5 - блок-схема осуществления системы, представленной на Фиг.4;
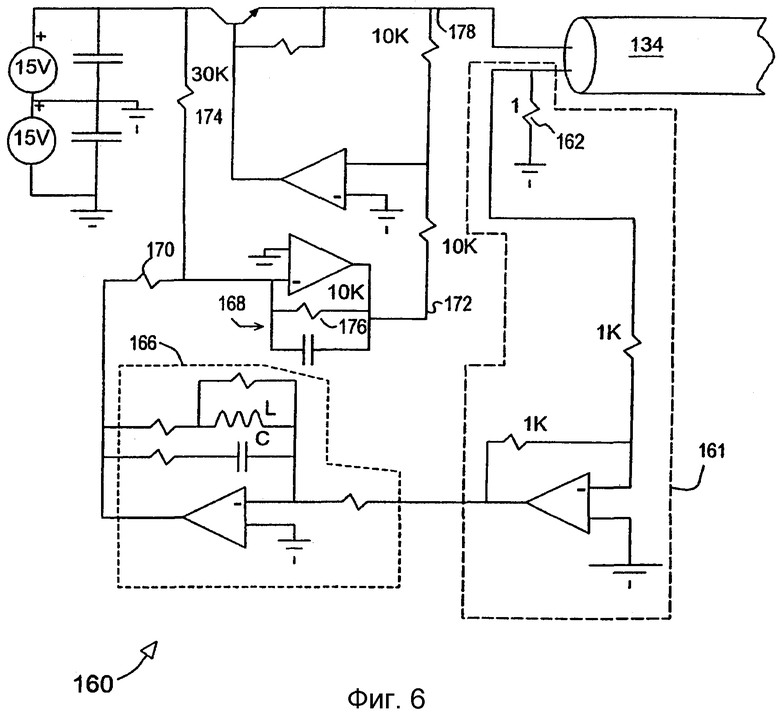
Фиг.6 - принципиальная схема с дополнительными подробностями осуществления системы согласно Фиг.5.
Несмотря на то, что данное изобретение осуществимо с различными изменениями и вариантами, его конкретные осуществления приводятся, в качестве примера, на чертежах и поясняются в нижеприведенном описании. Необходимо отметить, что представленные чертежи и подробное описание не предназначены для ограничения изобретения, но, напротив, изобретение ограничивается только текстом прилагаемой ниже формулы изобретения.
Настоящее изобретение в общем предусматривает систему и способ для регулирования напряжения нагрузки, такой как нагрузка на конце троса, которая находится на значительном расстоянии от управляющей схемы, и доступ к которой со стороны этой схемы не эффективен. Изобретение включает в себя блок обратной связи, выполненный с возможностью моделирования имеющегося в самом тросе входного полного сопротивления в режиме короткого замыкания на входе. Ток от источника напряжения системы подается в блок обратной связи для создания напряжения обратной связи, приближающегося к падению напряжения, происходящему вдоль троса. Это напряжение обратной связи суммируется с заданным напряжением, которое равно нужному напряжению нагрузки. При суммировании напряжения, приблизительно равного обусловленному тросом падению напряжения, изобретение использует положительную обратную связь, чтобы регулировать напряжение в условиях, когда не возможно эффективное измерение самого напряжения нагрузки.
Система содержит управляющий механизм, в котором сигнал, измеряемый в источнике напряжения, обеспечивает входной сигнал в схему, моделирующую характеристики полного сопротивления троса. Выходной сигнал схемы модели представляет приближение воздействия, оказываемого измеряемым сигналом на напряжение нагрузки в фактическом тросе. Это приближение затем используют для изменения напряжения источника питания, чтобы аннулировать воздействие, оказываемое полным сопротивлением троса на напряжение нагрузки. Согласно одному из осуществлений сигнал, обеспечивающий входной сигнал в схему модели троса, является током источника питания. В этом осуществлении схема модели троса представляет имеющееся в тросе входное полное напряжение в режиме короткого замыкания на входе, т.е. полное сопротивление троса, когда нагрузочный конец троса находится в режиме короткого замыкания. Это полное сопротивление можно измерить эмпирически путем определения характеристик троса или введением необходимых измерительных схем в саму систему. При подаче тока источника питания в схему модели троса, схема формирует сигнал смещения напряжения, который характеризует потерю напряжения в тросе. Суммирование этого смещенного напряжения с заданным напряжением позволяет системе регулирования напряжения сохранять напряжение нагрузки на заданном напряжении. В контур обратной связи можно ввести компенсационную схему, чтобы улучшить переходную характеристику и устойчивость системы.
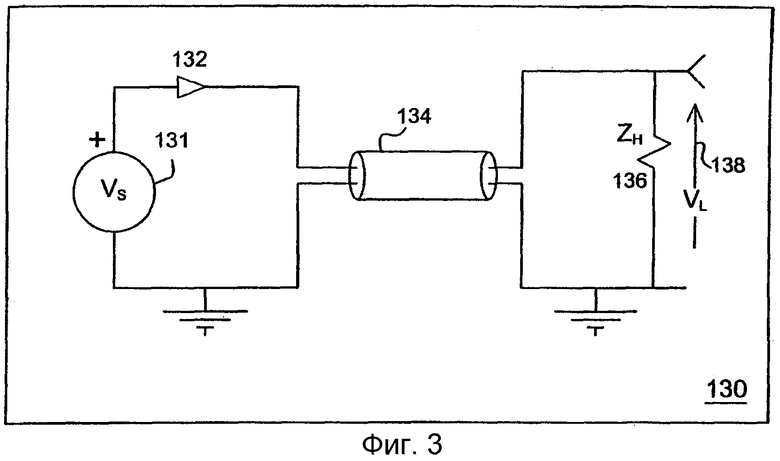
В модели резистивной схемы, иллюстрированной на Фиг.1, ток источника питания равен току нагрузки. Но в фактической тросовой системе трос вводит в систему потерю сигнала и задержку во времени. Обращаясь к Фиг.3, показана схемная модель тросовой системы 130, которая содержит элемент 134 передающей линии, являющейся тросом. Волновое полное сопротивление передающей линии 134 обозначено как Z0. Взаимосвязь между напряжением VS 131 источника питания, током IS 132 источника питания и напряжением VH 138 нагрузки или головной части:
VH=[VS/cosh(γl)][ZH/(ZH+Z0tanh(γl)] Уравнение 1
IS=[VS/Z0][(Z0+ZHtanh(γl))/(ZH+Z0tanh(γl))] Уравнение 2
где l есть длина передающего троса 134, и γ - постоянная распространения в тросе. Перегруппировка Уравнений 1 и 2 и замена γl на K дает:
ZH=Z0[VS-Z0IStanh(K)]/[Z0IS-VStanh(K)] Уравнение 3
VH=(VS-ISZ0tanh(K))cosh(K) Уравнение 4
Входное полное сопротивление передающего троса, когда нагрузка или дальний конец находятся в режиме короткого замыкания, обозначено как входное полное сопротивление в режиме короткого замыкания на входе Zis. Если постоянная распространения в тросе - γ и длина передающего троса - l, то входное полное сопротивление в режиме короткого замыкания на входе Zis=Z0tanh(K). Замена Z0tanh(K) в Уравнении 4 дает:
VH (VS-ISZis)cosh(K) Уравнение 5
Замена VS на выражение Vset/cosh(K)+ISZis в Уравнении 5 дает:
VH=Vset (если VH=Vset/cosh(K)+ISZis) Уравнение 6
Из Уравнения 6 следует вывод о том, что есть возможность обеспечивать напряжение VH нагрузки на приблизительно нужном напряжении (Vset) путем возбуждения троса напряжением (VS), равным Vset, плюс напряжение обратной связи, где напряжение обратной связи зависит от тока (IS) источника напряжения. В условиях установившегося режима и в используемом диапазоне низких частот, коэффициент cosh(K) приблизительно равен 1, и напряжение VH нагрузки равно по существу Vset. Коэффициент cosh(K) характеризует потери и задержку в передающей линии. Хотя потери в линии можно компенсировать, задержку можно компенсировать только при условии, что будут предусмотрены изменения тока. Поскольку это теоретически невозможно, поэтому коэффициент cosh(K) ставит ограничение максимальной частоте, на которой блок обратной связи может отслеживать изменения полного сопротивления нагрузки. Тем не менее, поскольку ток IS источника напряжения легко измерить на поверхности, поэтому Уравнение 6 предполагает схему управления, которая целесообразна в широком диапазоне частот, и для нее не требуется значение, такое как напряжение нагрузки, которое можно получить только при нагрузке.
Обращаясь к Фиг.4, представлена схематическая модель системы тросового каротажа, применяющей регулирование обратной связи, выводимое из Уравнения 6. В этой модели источник 141 электропитания или другой источник напряжения возбуждает трос напряжением VS источника питания. Взаимосвязь между напряжением VH нагрузки и напряжением VS источника питания, вытекающая из Уравнения 1, представлена блоками 143 и 144. Взаимосвязь между током IS источника питания и напряжением VS источника питания согласно Уравнению 2 представлена в блоках 143 и 145. Необходимо отметить, что в этом схематическом представлении блоки 143, 144 и 145 не соответствуют физическим схемам в системе, а представляют взаимосвязь между различными входными и выходными параметрами системы. Напряжение VF обратной связи зависит от тока IS источника питания и полного сопротивления Zis=Z0tanh(K) короткого замыкания линии, согласно блоку 146. Напряжение VF обратной связи суммируется с заданным напряжением Vset c получением напряжения VS источника питания, возбуждающего трос.
Полное сопротивление Zis в режиме короткого замыкания линии можно определить эмпирически из характеристик троса, либо необходимые схемы можно ввести в систему, чтобы выполнить требуемое(ые) измерение(я) при повышении мощности, или периодически в работе. Напряжение VF обратной связи приближается к падению напряжения в передающей линии при токе источника питания. Путем суммирования этого падения напряжения с заданным напряжением Vset напряжение нагрузки обеспечивается приблизительно на заданном напряжении, причем это приближение очень точное в установившемся режиме и при низких частотах.
Если определить график Найквиста для фактического троса с резистором, согласованным с сопротивлением троса, то график будет включать в себя точку -1 на комплексной плоскости, тем самым указывая на неустойчивость. Для стабилизирования схемы 140 регулирования напряжения, нужную компенсацию устойчивости может обеспечить полюс в контуре обратной связи.
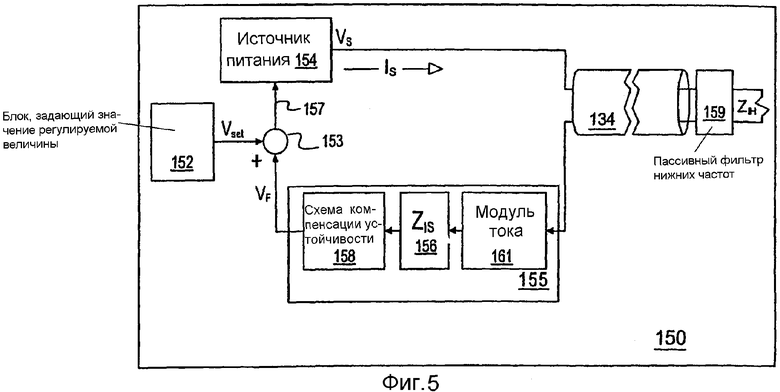
Обращаясь к Фиг.5, представлена блок-схема осуществления системы 150 возбуждения тросовой системы. В описываемом варианте система 150 содержит блок 152, задающий значение регулируемой величины, и который генерирует регулируемое напряжение Vset. Блок 152, задающий значение регулируемой величины, может быть выполнен с помощью схемы на кремниевом стабилитроне или с помощью любого другого метода для генерирования аналогового сигнала опорного напряжения. Согласно другому осуществлению блок 152, задающий значение регулируемой величины, может просто генерировать сигнал, характеризующий Vset, а не генерирующий фактическое напряжение. Если, например, систему 150 выполнить на процессоре цифрового сигнала (ПЦС), то блок 152, задающий значение регулируемой величины, при этом может содержать часть ПЦС, который генерирует цифровое значение, характеризующее Vset. Это цифровое значение можно преобразовать в Vset цифроаналоговым преобразователем, или непосредственно направить в источник питания с цифровым управлением. Выходной сигнал блока 152, задающий значение регулируемой величины, направляет первый входной сигнал в сумматор 153.
Сумматор 153 принимает второй входной сигнал с выхода блока 155 обратной связи, который генерирует сигнал напряжения обратной связи, характеризующий напряжение VF обратной связи. Подобно блоку 152, задающему значение регулируемой величины, сумматор 153 может содержать часть ПЦС, который формирует сигнал, содержащий цифровое значение, характеризующее соответствующее напряжение. Сумматор 153 генерирует сигнал 157 напряжения, который подает входной сигнал в источник питания.
Обычно источником 154 питания является модулирующий источник питания, который выдает выходное напряжение VS, пропорциональное входному напряжению. Согласно одному из осуществлений, источник 154 питания можно выполнить в виде импульсного источника электропитания (который также называют "переключающимся преобразователем"), который выполняет функцию источника питания с помощью таких имеющих низкий уровень потерь компонентов, как конденсаторы, индукторы и трансформаторы, и в виде группы переключателей двух состояний. Источник 154 питания может быть источником питания с цифровым управлением. Согласно этому осуществлению сигнал 157 напряжения может содержать цифровое значение, указывающее напряжение, а не фактический уровень напряжения.
Блок 155 обратной связи возбуждается током IS источника питания, генерируемым источником 154 питания. Блок 155 обратной связи генерирует сигнал напряжения обратной связи. Сигнал напряжения обратной связи может быть аналоговым сигналом, напряжение которого равно напряжению VF обратной связи. Согласно еще одному осуществлению сигнал напряжения обратной связи может содержать цифровое значение, характеризующее напряжение VF обратной связи. Согласно описываемому осуществлению блок 155 обратной связи содержит модуль 161 измерения тока, элемент 156 полного сопротивления и элемент 158 компенсации напряжения. Модуль 161 измерения тока содержит схему, которая определяет величину тока IS источника питания и направляет сигнал в элемент 156 полного сопротивления, указывающий ток, который определен. Согласно одному из осуществлений элемент 156 полного сопротивления выполнен с возможностью иметь полное сопротивление, которое близко согласуется с имеющимся в тросе входным полным сопротивлением Zis в режиме короткого замыкания. Согласно еще одному осуществлению элемент 156 полного сопротивления может моделировать постоянную составляющую входного полного сопротивления в режиме короткого замыкания (т.е. сопротивление по постоянному току). В этом осуществлении рабочие показатели снижены ради большей простоты осуществления и пониженной себестоимости. Элемент 158 компенсации устойчивости выполнен с возможностью повышения переходной характеристики и устойчивости схемы. Блок 155 обратной связи может быть полностью или частично выполнен с помощью соответствующим образом запрограммированного ПЦС. Обращаясь к Фиг.6, представлен пример диаграммы схемы 160, применение которой соответствует осуществлению системы 150, показанной на Фиг.5. В иллюстрируемом осуществлении модуль 161 измерения тока согласно Фиг.5 выполнен на основе низкоомного резистора, такого как 1 Ω резистор 162, подключенный между передающим кабелем 134 и заземлением, в результате чего напряжение на резисторе 162 в вольтах равно току IS источника питания в амперах. Иллюстрируемое осуществление модуля 161 также включает в себя схему операционного усилителя, выполняющую функцию инвертирования и выделения, особую для иллюстрируемого осуществления. Элемент 156 полного сопротивления согласно Фиг.5 выполнен в виде резистивно-индуктивно-емкостной цепи 166, которая моделирует полное сопротивление линии в режиме короткого замыкания. Выходной сигнал цепи 166 объединяется посредством резистора 170 с опорным напряжением.
Схема опорного напряжения содержит источники напряжения на 15В и их соответствующие конденсаторы. Без напряжения обратной связи, генерируемого РИЕ-цепью 166, резисторы 174 и 176 вырабатывают опорное напряжение (Vset) в узле 172 в условиях установившегося режима. При генерируемом цепью 166 напряжении обратной связи узел 172 имеет изменения вблизи значения заданного напряжения, реагируя на изменения в токе IS источника питания. Узел 178 источника напряжения, который представляет напряжение VS источника питания, возбуждающего трос, зеркально отражает напряжение на узле 172, в результате чего, когда напряжение в узле 172 изменяется, реагируя на изменяющиеся значения напряжения обратной связи, то напряжение VS источника питания в узле 178 тоже изменяется. Схема 168 интегратора обеспечивает компенсацию устойчивости. Если полное сопротивление нагрузки изменяется значительно, то усиление или ослабление тока источника питания обусловит соответствующее повышение или понижение напряжения обратной связи, что вызовет повышение или понижение напряжения источника питания, чтобы сохранять напряжение нагрузки при относительно постоянном значении.
Нужно отметить, что обозначенные на Фиг.6 схемные элементы можно выполнить с помощью более передовой техники, чем в описываемом виде дискретных компонентов. Например, ПЦС можно выполнить с возможностью оптимизирования времени срабатывания схемы и устойчивости. ПЦС мог бы, например, обеспечивать более точный повтор полного сопротивления троса и схем устойчивости. Помимо этого, альтернативные осуществления данного изобретения могут в блоке 155 обратной связи содержать пропорциональные, дифференциальные или интегрирующие элементы обратной связи. Изменения напряжения нагрузки можно также ограничить с помощью пассивного фильтра 159 нижних частот между тросом и полным сопротивлением ZH нагрузки, или параллельно с полным сопротивлением нагрузки, которое понизит последствия быстрых изменений полного сопротивления ZH нагрузки.
Специалистам в области техники применения данного изобретения будет очевидно, что оно предполагает систему и способ регулирования напряжения, целесообразные для использования в тросовом каротаже. Подразумевается, что изобретение в подробно описываемом и поясняемом здесь виде и прилагаемые чертежи должны рассматриваться только как предпочтительные в настоящее время примеры. Полагается, что изобретение ограничивается только формулой изобретения.
Изобретение относится к системам сбора данных и может быть использовано в каротажной системе, спускаемой на тросе. Система (150) для регулирования напряжения, подаваемого в систему передающей линии. Система (150) содержит передающий трос (134), имеющий волновое полное сопротивление и полное сопротивление нагрузки, подключенное на его дальнем конце. Источник (154) питания подключен к передающем тросу (134). Источник (154) питания выполнен с возможностью приема входного сигнала (157) напряжения и с возможностью возбуждения напряжения VS источника питания на его основе. Блок (155) обратной связи выполнен с возможностью приема тока (IS) источника питания в качестве входного сигнала и также выполнен с возможностью генерирования напряжения (VF) обратной связи, которое изменяется посредством тока IS. Блок (152) заданного напряжения выполнен с возможностью генерирования по существу неизменного напряжения (Vset), и сумматор (153) выполнен с возможностью суммирования заданного напряжения (Vset) с напряжением обратной связи, чтобы формировать сигнал (157) напряжения, который направляет входной сигнал в источник (154) электропитания. Технический результат - стабилизация напряжения на нагрузке. 3 н. и 30 з.п. ф-лы, 6 ил.
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ПРИБОРОВ ДЛЯ КАРОТАЖА СКВАЖИН | 1999 |
|
RU2151868C1 |
| ЕР 689300 А1, 27.12.1995 | |||
| US 5081411, 14.01.1992 | |||
| Комплексно-комбинированный прибор для каротажа скважин | 1985 |
|
SU1341603A2 |

