Область техники, к которой относится изобретение
Объекты изобретения относятся к электродвигателям постоянного тока ("DC", "ПТ"). Более конкретно, объекты изобретения относятся к детектированию состояния перегрузки электродвигателя постоянного тока.
Уровень техники
При увеличении нагрузки электродвигателя постоянного тока, отбираемый электродвигателем ток и рассеивание вырабатываемого внутри него тепла, также увеличиваются. Одновременно его скорость и количество охлаждающего воздуха, подаваемого внутренним или внешним вентилятором, который вращается со скоростью электродвигателя, уменьшается. В соответствии с этим температура электродвигателя повышается. Поскольку температура влияет как на рабочие характеристики, так и на долговечность электродвигателя, электродвигатели разрабатывают таким образом, чтобы они работали в пределах строго определенной нагрузки. Однако в процессе эксплуатации могут возникать непредвиденные обстоятельства, которые приводят к превышению конструктивно заданных значений нагрузки электродвигателя, и в результате чего температура электродвигателя может превысить допустимый предел. Иногда в результате этого происходит поломка электродвигателя. В исключительных обстоятельствах возникает возгорание одного или больше материалов в электродвигателе.
Пример варианта применения, в котором перегрузка электродвигателя может составлять проблему, представляет собой охлаждение двигателя автомобиля. Во многих автомобильных транспортных средствах используется узел электрического вентилятора для обеспечения потока воздуха через радиатор, конденсатор или другой теплообменник. Как правило, электропитание такого узла осуществляется от электродвигателя постоянного тока. Наличие снега, льда или грязи могут повысить крутящий момент, требуемый для вращения вентилятора, или, в исключительных случаях, не позволяет вентилятору вращаться вообще. Неисправный подшипник электродвигателя также может замедлить или прекратить вращение. Такие ситуации могут привести к поломке электродвигателя. В отдельных случаях они могут привести к возгоранию под капотом автомобиля. Поэтому желательно детектировать состояние перегрузки прежде, чем оно приведет к чрезмерному повышению температуры электродвигателя.
Детектирование перегрузки обычно включает в себя периодическое отслеживание нагрузки электродвигателя при его использовании. Традиционные способы отслеживания нагрузки электродвигателя включают в себя измерение тока, отбираемого электродвигателем, температуры электродвигателя, скорости электродвигателя или противоэлектродвижущей силы ("противо-ЭДС"), генерируемой электродвигателем.
Измерение противо-ЭДС включает в себя периодическое отключение электродвигателя от источника энергии и измерение напряжения отключенного электродвигателя, в который не подается энергия, через достаточный период времени, после которого токи электродвигателя падают до нуля, но до того, как электродвигатель значительно замедлит свое вращение. Такое напряжение представляет собой показатель противо-ЭДС, который увеличивается со скоростью электродвигателя. Если противо-ЭДС достаточно мала, это указывает на состояние перегрузки, и электродвигатель может быть отключен. Если противо-ЭДС достаточно велика, это обозначает нормальную работу, и ток можно снова подать в электродвигатель.
Однако недостаток существующих способов измерения противо-ЭДС, используемых для определения наличия состояния перегрузки, представляет собой время, требуемое для проведения измерения. После отключения электродвигателя необходимо некоторое время, чтобы измеряемое напряжение приблизилось к асимптотическому значению, обозначающему противо-ЭДС. Это усложняется тем фактом, что измерение по своей сути представляет собой измерение в условиях повышенных шумов. Напряжение на отключенном выводе электродвигателя будет иметь пульсации напряжения с частотой переключения, а также случайные шумы. Оба эти компонента изменяются по мере изменения состояния щеток и коллектора в ходе эксплуатации электродвигателя. Для устранения их влияния на измерение напряжения сигнал необходимо фильтровать с постоянной времени, равной нескольким периодам коммутации. Это увеличивает длительность времени, необходимого для получения точного результата измерения противо-ЭДС, и длительность времени, в течение которого электродвигатель будет отключен. Если периоды отключения будут достаточно длительными, они могут стать акустически ощутимыми и могут привести к повышенному износу из-за люфта между валом электродвигателя и приводимой в движение нагрузкой. Таким образом, необходимо разработать улучшенные способы и устройства отслеживания нагрузки электродвигателя.
Сущность изобретения
Далее описаны определенные примерные варианты воплощения изобретения. Все варианты воплощения не описаны, но это никоим образом не следует рассматривать как ограничение изобретения.
В одном объекте изобретение касается способа отслеживания нагрузки электродвигателя постоянного тока и заключается в том, что периодически отключают электродвигатель; отслеживают первое напряжение; и измеряют первый временной интервал между моментом начала и моментом окончания, при этом момент начала представляет собой момент, когда электродвигатель был отключен, а момент окончания представляет собой момент, когда первое напряжение и эталонное напряжение имеют, по существу, одинаковые значения.
Другой объект изобретения касается системы отслеживания нагрузки электродвигателя, выполненной с возможностью отслеживания состояния электродвигателя постоянного тока, имеющего первый вывод электродвигателя и второй вывод электродвигателя. Первый и второй выводы электродвигателя выполнены с возможностью подключения их к источнику питания или источнику напряжения. Система включает в себя переключатель, выполненный с возможностью подключения между источником питания и первым выводом электродвигателя; контур обратного тока между первым выводом электродвигателя и вторым выводом электродвигателя; и контроллер, выполненный с возможностью подключения к переключателю. Диод свободного вращения, переключатель или другие устройства предотвращают протекание тока по обратному контуру, когда к электродвигателю подано питание. Контроллер периодически отключает электродвигатель, управляя переключателем, и получает отслеживаемое напряжение. Контроллер выполнен с возможностью измерения первого временного интервала между моментом начала и моментом окончания, причем момент начала представляет собой момент, когда электродвигатель был отключен, а момент окончания представляет момент, когда отслеживаемое напряжение пересекает уровень опорного напряжения.
Другой объект изобретения касается системы электродвигателя для охлаждения автомобильного электродвигателя, содержащей электродвигатель, имеющий первый вывод электродвигателя и второй вывод электродвигателя. Первый и второй выводы электродвигателя выполнены с возможностью подключения к источнику питания. Система включает в себя переключатель, выполненный с возможностью подключения между источником питания и первым выводом электродвигателя; контур обратного тока между первым выводом электродвигателя и вторым выводом электродвигателя; и контроллер, выполненный с возможностью подключения к переключателю. Контроллер периодически отключает электродвигатель, управляя переключателем, получает отслеживаемое напряжение и измеряет первый временной интервал между моментом начала и моментом окончания, причем момент начала представляет собой момент, когда электродвигатель был отключен, а момент окончания представляет собой момент, когда отслеживаемое напряжение пересекает опорное значение напряжения.
Другие аспекты указанных объектов изобретения будут понятны из подробного описания изобретения и прилагаемых чертежей.
Краткое описание чертежей
Фиг.1 иллюстрирует автомобиль с вентилятором охлаждения и примерной системой детектирования перегрузки электродвигателя.
Фиг.2 иллюстрирует примерный способ, который может использоваться для детектирования состояния перегрузки электродвигателя.
Фиг.3 иллюстрирует примерную систему детектирования перегрузки электродвигателя, которая включает в себя полевой транзистор, установленный на стороне низкого напряжения электродвигателя.
Фиг.3В иллюстрирует другую примерную систему детектирования перегрузки электродвигателя.
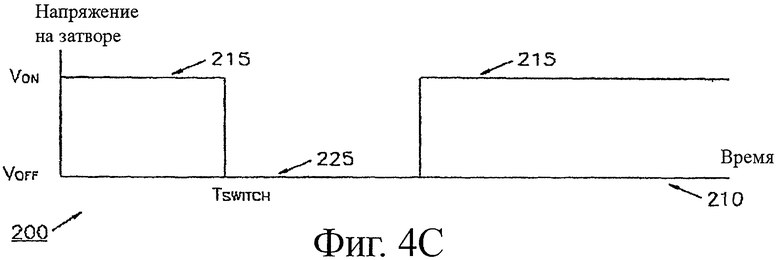
Фиг.4А - график зависимости напряжения от времени на затворе полевого транзистора, представленного на фиг.3, во время одиночного события отключения.
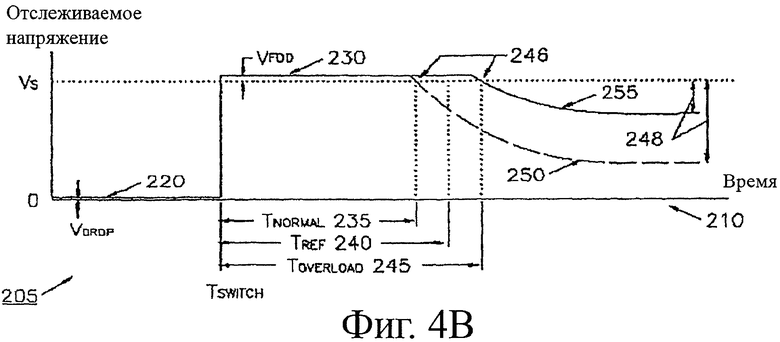
Фиг.4В - график зависимости напряжения от времени в точке "А" отслеживания, показанной на фиг.3, во время одиночного события отключения.
Фиг.4С - график зависимости напряжения от времени на затворе полевого транзистора, показанного на фиг.3, во время отключения и повторного включения электродвигателя в случае нормальной нагрузки.
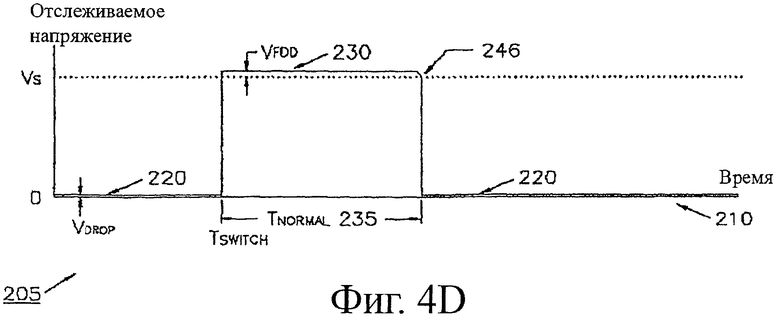
Фиг.4D - график зависимости напряжения от времени в точке "А" отслеживания, показанной на фиг.3, во время отключения и повторного включения электродвигателя в случае нормальной нагрузки.
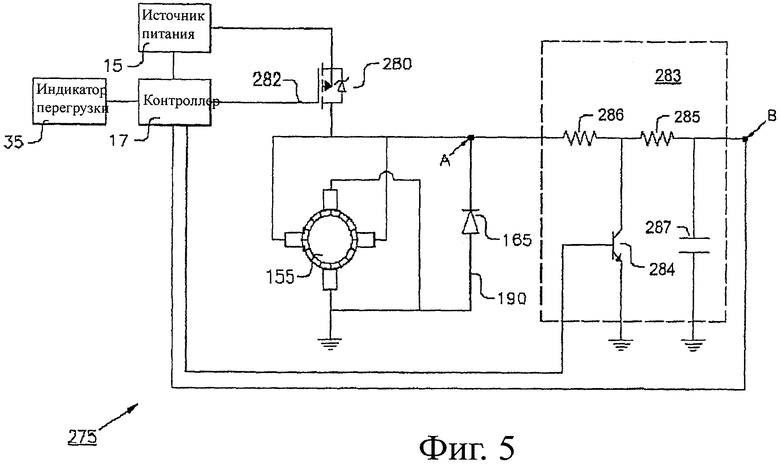
Фиг.5 иллюстрирует другую примерную систему детектирования перегрузки электродвигателя, которая включает в себя полевой транзистор, установленный на стороне высокого напряжения электродвигателя.
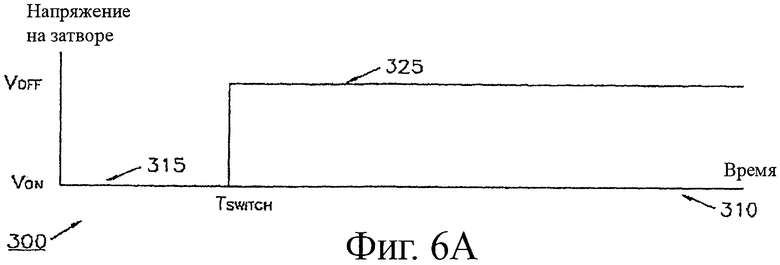
Фиг.6А - график зависимости напряжения от времени на затворе полевого транзистора, представленного на фиг.5, во время одиночного события отключения питания.
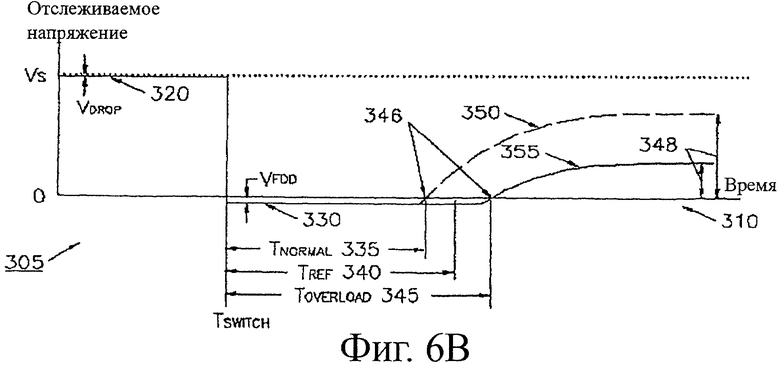
Фиг.6В - график зависимости напряжения от времени в точке "А" отслеживания, обозначенной на фиг.5, во время одиночного события отключения питания.
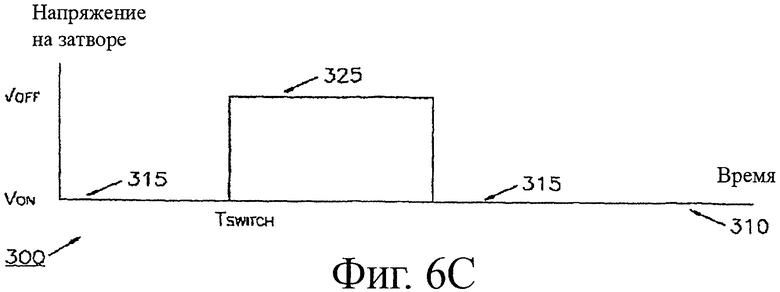
Фиг.6С - график зависимости напряжения от времени на затворе полевого транзистора, показанного на фиг.5, во время отключения и повторного включения питания электродвигателя в случае нормальной нагрузки.
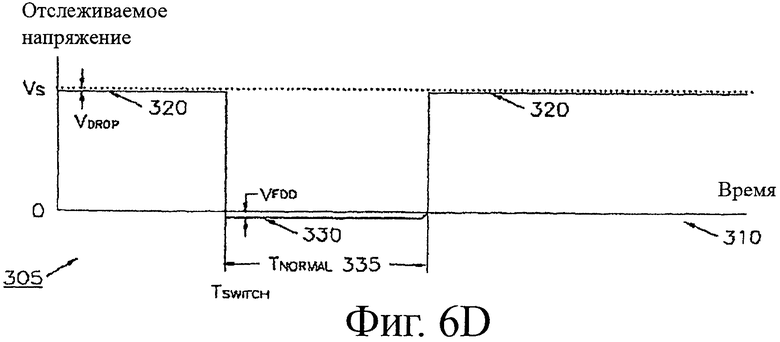
Фиг.6D - график зависимости напряжения от времени в точке "А" отслеживания, обозначенной на фиг.5 во время отключения и повторного включения электродвигателя в случае нормальной нагрузки.
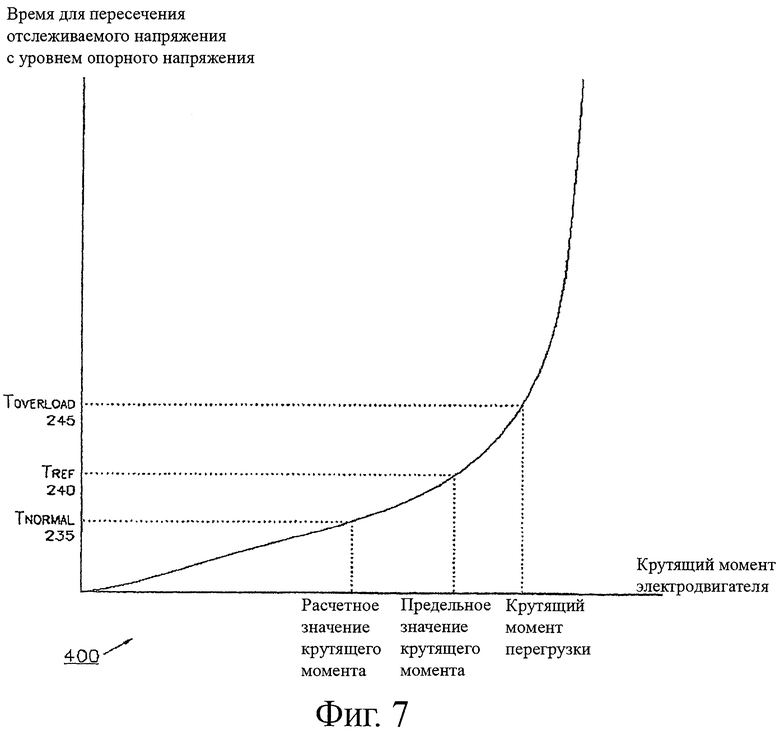
Фиг.7 - график зависимости крутящего момента электродвигателя от времени, когда отслеживаемое напряжение пересекает значение опорного напряжения.
Подробное описание изобретения
Перед подробным описанием какого-либо из вариантов воплощения изобретения следует понимать, что изобретение не ограничивается при его применении деталями и конструкцией, а также компоновкой компонентов, представленными в следующем описании или изображенными на следующих чертежах. Изобретение может быть выполнено в других вариантах и может применяться на практике или может осуществляться различными способами.
На фиг.1 иллюстрируется вариант воплощения системы 10 детектирования перегрузки электродвигателя. Система 10 детектирования перегрузки электродвигателя включает в себя источник 15 питания (такой как батарея транспортного средства), электродвигатель 20, устройство переключения или переключатель 30, контур обратного тока, содержащий диод 18 или аналогичное устройство, контроллер 17, фильтр 19 и индикатор 35 перегрузки. Электродвигатель соединен с вентилятором 22, который может использоваться, например, для того, чтобы направлять воздух на радиатор (не показан). Контроллер принимает отслеживаемое напряжение 25 в качестве входного сигнала. Система 10 особенно полезна для использования в автомобилях (таких как автомобиль 40 (показан схематично)), но также может использоваться в других вариантах, в которых требуется отслеживать перегрузку электродвигателя.
Контроллер 17 передает сигналы в переключатель 30 и индикатор 35 перегрузки. Контроллер 17 детектирует наличие состояния перегрузки, передавая сигналы в переключатель для прерывания тока, подаваемого от источника питания, и затем сравнивая отслеживаемое напряжение 25 с опорным напряжением (которое в одном варианте воплощения представляет собой напряжение источника 15 питания), как более подробно описано со ссылкой на фиг.2.
В случае, когда состояние перегрузки не возникает, контроллер передает сигналы в переключатель, замыкая его, для повторной подачи питания в электродвигатель. Если присутствует состояние перегрузки, контроллер выполняет соответствующее действие. В некоторых вариантах воплощения контроллер ожидает определенный период времени до подачи сигналов на замыкание переключателя и, таким образом, повторной подачи питания в электродвигатель. В других вариантах воплощения контроллер не подает сигнал на повторное питание электродвигателя. В некоторых вариантах воплощения контроллер передает сигналы в индикатор 35 перегрузки для обеспечения звуковой, визуальной или другой индикации состояния перегрузки. Например, индикатор 35 перегрузки может представлять собой периодически включающийся световой индикатор, сигнал тревоги, сообщение о неисправности или их комбинации. Также возможны другие индикаторы 35 перегрузки. В некоторых вариантах воплощения выполняется комбинация этих действий.
В некоторых вариантах воплощения контроллер 17 инициирует цикл детектирования перегрузки (то есть описанное выше сравнение напряжения) через регулярные интервалы времени. Длительность этих интервалов может изменяться в зависимости от электродвигателя и варианта применения. Обычно теплоемкость электродвигателя достаточно велика для того, чтобы задержать возникновение повреждения, связанного с состоянием перегрузки, только на короткий период времени. Поэтому такое состояние, если оно присутствует, требуется детектировать в течение этого периода времени и отключить электродвигатель. Факторы, которые могут влиять на выбор частоты отслеживания нагрузки, могут включать в себя конструктивную нагрузку электродвигателя, степень обеспечиваемого охлаждения электродвигателя, теплоемкость электродвигателя и окружающую температуру. Например, электродвигатель с большой нагрузкой, работающий при высокой окружающей температуре, может потребовать более частого детектирования перегрузки для того, чтобы гарантировать работу электродвигателя в пределах соответствующего диапазона рабочих условий. Аналогично, для электродвигателя с относительно большой нагрузкой, работающего при низкой температуре, может потребоваться лишь редкое детектирование или отслеживание перегрузки.
Как показано на фиг.1, контроллер 17 может использоваться для управления циклом детектирования перегрузки, описанным выше. Контроллер 17 может представлять собой процессор, который выполняет программы, исполняемые компьютером (то есть программное обеспечение) с использованием системы управления (не показана). В других вариантах воплощения контроллер 17 может содержать аппаратное средство так, что функции, описанные здесь, выполняются с помощью аппаратных компонентов. Например, контроллер 17 может быть воплощен как специализированная интегральная схема ("ASIC", "СИМС"), встроенное программное обеспечение, специализированные компоненты или тому подобное, как известно в данной области техники. Таким образом, следует понимать, что контроллер 17 может быть воплощен в виде аппаратных средств, программных средств или их комбинации.
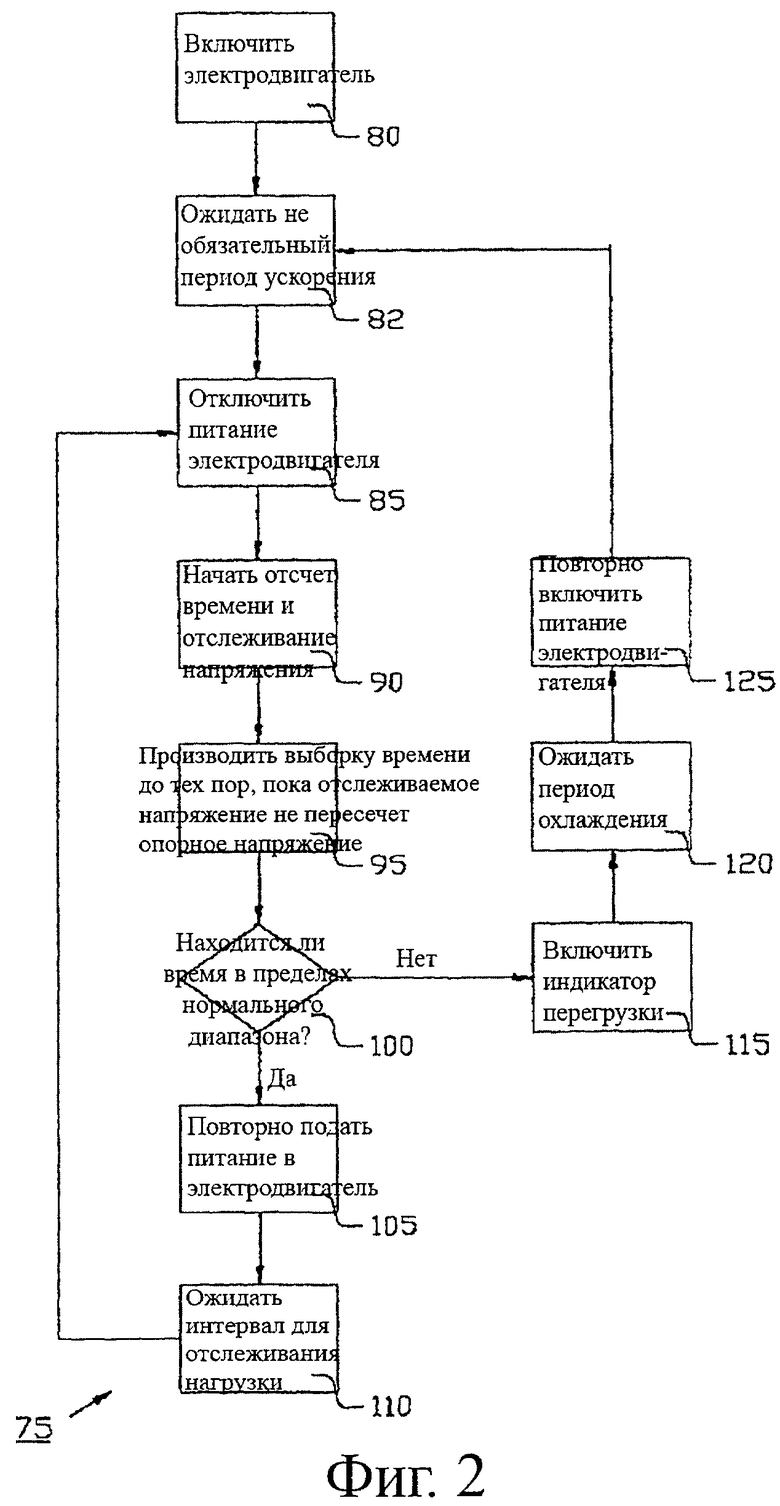
На фиг.2 иллюстрируется способ 75, который может быть воплощен с помощью контроллера 17, для детектирования состояния перегрузки. Вначале питание подают в электродвигатель на этапе 80. В некоторых вариантах воплощения детектирование перегрузки не выполняют в течение нормального периода запуска электродвигателя. В течение этого периода ускорение электродвигателя и приводимых в движение компонентов, таких как вентилятор, временно увеличивают нагрузку электродвигателя так, что она выходит за пределы рабочей нагрузки. Задержка первого события отслеживания нагрузки (этап 82) обеспечивает то, что такая временная нагрузка не будет интерпретирована как ситуация перегрузки. Период ускорения должен быть достаточно длительным, чтобы обеспечить для электродвигателя возможность достичь, по существу, постоянной скорости, но более коротким, чем время, требуемое для повреждения электродвигателя, если присутствует состояние перегрузки. В некоторых вариантах воплощения период ускорения короче, чем интервал между циклами детектирования перегрузки, во время подачи питания в электродвигатель.
После окончания периода ожидания или ускорения переключатель 30 используют для прерывания тока, который подают в электродвигатель от источника 15 питания (этап 85). Таким образом, электродвигатель отключают. В некоторых вариантах воплощения в качестве переключателя 30 используется транзистор (как показано на фиг.3). При отключении переключателя 30 контроллер 17 начинает измерять время сравнения между опорным напряжением и отслеживаемым напряжением 25 (этап 90). В некоторых вариантах воплощения функция измерения времени, и функция сравнения напряжения осуществляются контроллером 17, как показано в варианте воплощения на фиг.3. В других вариантах воплощения функция измерения времени и функция сравнения напряжения осуществляются с помощью других электронных аппаратных компонентов. Например, функция сравнения напряжения может быть закончена с использованием схемы сравнения на основе транзистора или на основе операционного усилителя ("ор amp", "ОУ"), как известно в данной области техники.
Сравнение напряжения продолжают и получают выборку времени сравнения до тех пор, пока отслеживаемое напряжение 25 и опорное напряжение не станут приблизительными равными (этап 95). Как описано более подробно со ссылкой на фиг.4В и 6В, отслеживаемое напряжение первоначально поддерживается в пределах долей вольта от напряжения на выводе не отключенного электродвигателя. Когда ток через электродвигатель падает до нуля, отслеживаемое напряжение проходит через уровень напряжения не коммутируемого вывода и, в конечном итоге, отличается от него на величину, равную напряжению противо-ЭДС. Напряжение противо-ЭДС образуется в результате продолжающегося вращения электродвигателя после отключения электродвигателя. В некоторых вариантах воплощения опорное напряжение принимают равным напряжению на выводе не отключенного электродвигателя. После детектирования примерного равенства между отслеживаемым напряжением 25 и опорным напряжением, выборку времени останавливают, измеряют и определяют его категорию (этап 95). Категории времени могут включать в себя, например, категорию без нагрузки, нормальную категорию и категорию перегрузки, причем каждая временная категория определена по определенному периоду времени. Например, нагрузка электродвигателя может быть отнесена к такой категории, как нормальная работа, если время, требуемое для падения отслеживаемого напряжения 25 до величины, которая приблизительно равна опорному напряжению, попадает в категорию нормального времени.
В одном варианте воплощения разделенные по категориям временные периоды первоначально определяют, используя известные характеристики электродвигателя. Например, если электродвигатель работает с расчетным напряжением, скоростью и крутящим моментом, отслеживаемое напряжение будет пересекать опорное значение напряжения в пределах предсказуемого промежутка времени. Если электродвигатель перегружен и работает с более высоким крутящим моментом и более низкой скоростью, напряжение будет пересекать опорное значение напряжения через более длительный промежуток времени. Может быть установлен опорный временной интервал, который представляет минимальное время, для которого состояние электродвигателя рассматривается как состояние перегрузки. В некоторых вариантах воплощения могут быть определены разные уровни перегрузки, и различные значения опорного временного интервала могут быть установлены для их разделения. Если электродвигатель работает при выбранных или изменяющихся напряжениях, опорные значения временного интервала могут отличаться в соответствии с напряжением. Аналогично, окружающая температура может влиять на значение опорного временного интервала. Значения опорного временного интервала, которые соответствуют каждому состоянию, могут быть выбраны для каждого варианта применения. Кроме того, временные интервалы, которые соответствуют каждой категории, могут быть определены для разных электродвигателей. Например, электродвигатель мощностью 200 Вт будет иметь нормальный временной интервал и временной интервал перегрузки, отличающиеся от соответствующих интервалов для электродвигателя мощностью 400 Вт. В некоторых вариантах воплощения контроллер 17 можно использовать для сохранения каждого определенного значения опорного временного интервала. Например, в одном варианте воплощения контроллер 17 может включать в себя справочную таблицу ("LUT") значений опорных временных интервалов, которые соответствуют каждому определенному рабочему состоянию (например, нормальное, перегрузка и т.д.).
Если измеренные периоды времени находятся в пределах расчетного диапазона (этап 100), на переключатель 30 повторно подают питание (этап 105). Обработка затем переходит на этап 110 и ожидает заданный промежуток времени, прежде чем будет снова подано питание на переключатель 30 (этап 85), таким образом снова инициализируя цикл детектирования перегрузки. Этот промежуток времени должен быть достаточно коротким, чтобы детектировать состояние перегрузки до того, как это состояние приведет к необратимому или постоянному повреждению электродвигателя и соответствующих устройств (таких как вентилятор, электронная схема управления и т.д.).
Если измеренный временной интервал не попадает в пределы категории нормального рабочего состояния, состояние может быть идентифицировано как состояние перегрузки. В некоторых вариантах воплощения сигнал затем подают в индикатор 35 перегрузки (этап 115). В некоторых вариантах воплощения, если будет распознано состояние перегрузки, электродвигатель остается отключенным в течение определенного промежутка времени (этап 120). Это время позволяет электродвигателю остыть и его может быть достаточно для устранения состояния перегрузки. Например, в некоторых вариантах воплощения причина состояния перегрузки может состоять в образовании наледи на узле вентилятора автомобиля в зимних условиях, и времени, в течение которого электродвигатель будет отключен, может быть достаточно для плавления льда под действием тепла двигателя транспортного средства. После того как период охлаждения пройдет, переключатель 30 возвращают в электропроводное состояние (этап 125) и снова подают питание на электродвигатель. Затем происходит период ожидания в течение достаточного времени для ускорения электродвигателя (этап 82) прежде, чем начнется следующий цикл отслеживания нагрузки. Для того чтобы электродвигатель оставался достаточно холодным, если состояние перегрузки сохраняется, период охлаждения, в некоторых вариантах воплощения, может быть большим, чем пятикратное значение отмеченного выше периода ускорения.
В других вариантах воплощения, если состояние перегрузки будет распознано, переключатель 30 остается в неэлектропроводном состоянии, и на электродвигатель не подают питание. В других вариантах воплощения категория перегрузки может включать в себя несколько уровней, причем каждый уровень обозначает разную степень перегрузки, которая требует разных действий. В одной категории может применяться период отключения для охлаждения, после чего следует повторная подача питания на электродвигатель, в то время как для других категорий электродвигатель остается без питания.
В некоторых вариантах воплощения скоростью электродвигателя можно управлять. Это может осуществляться с использованием широтно-импульсной модуляции. В некоторых вариантах воплощения переключатель 30, используемый для детектирования перегрузки, также используют для широтно-импульсной модуляции, избирательной подачи питания к щеткам или для управления скоростью с другой целью.
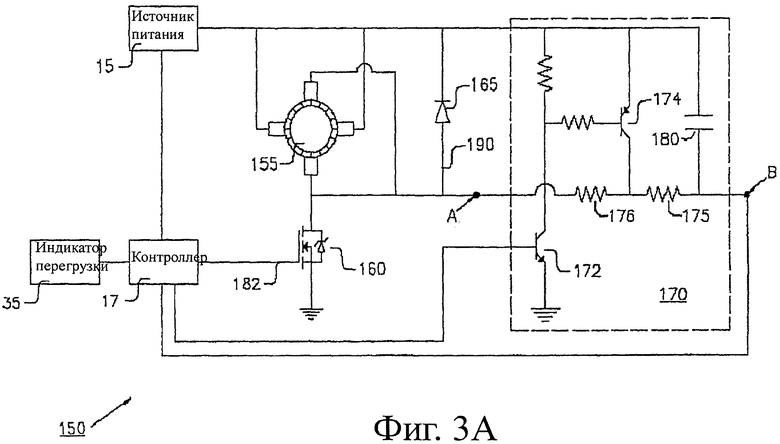
На фиг.3 схематично представлен один вариант воплощения системы 150 детектирования перегрузки электродвигателя. Система 150 детектирования перегрузки электродвигателя включает в себя электродвигатель 155, источник 15 питания, N-канальный полевой транзистор ("FET", "ПТР") 160, диод 165 свободного вращения (или "обратного тока"), фильтр 170, контроллер 17 и индикатор 35 перегрузки. В других вариантах воплощения, как описано выше, система 150 детектирования перегрузки электродвигателя может иметь большее или меньшее количество элементов, чем представлено на фиг.3. Например, система 150 детектирования перегрузки электродвигателя может включать в себя дополнительные аппаратные средства (например, схему сравнения, схему таймера и т.п.), которые выполняют функции, аналогичные функциям контроллера 17. Поэтому, в таких вариантах воплощения, контроллер 17 может быть исключен из системы 150 детектирования.
В некоторых вариантах воплощения электродвигатель 155 представляет собой четырехполюсный электродвигатель постоянного тока со щетками. Однако можно использовать электродвигатели других типов (например, бесщеточный электродвигатель постоянного тока) и электродвигатели, имеющие другое количество полюсов. В некоторых вариантах воплощения схему, показанную на фиг.3, используют для питания электродвигателя только в одном направлении. В других вариантах воплощения схему, показанную на фиг.3, используют как часть схемы "полного моста", которая обеспечивает питание электродвигателя в разных направлениях вращения.
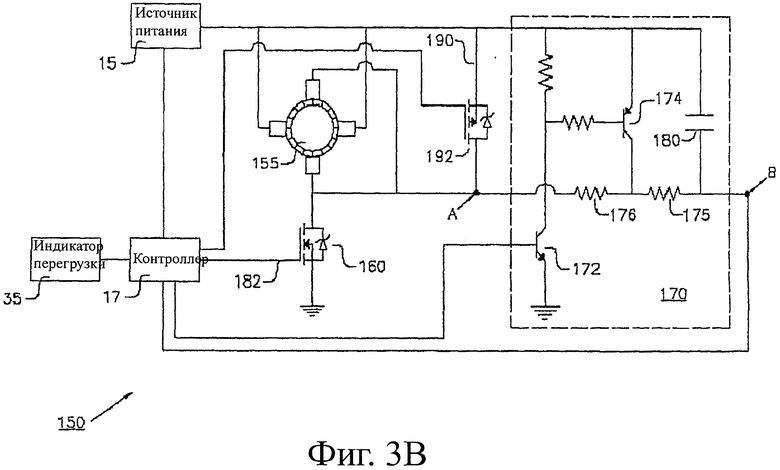
В некоторых вариантах воплощения схемой в контуре 190 обратного тока управляют с помощью диода 165 свободного вращения, как показано на фиг.3. Однако в других вариантах воплощения, как показано на фиг.3В, контуром 190 обратного тока управляют с помощью других устройств. Например, если ПТР 160 используют для управления скоростью вращения с помощью PWM (ШИМ, широтно-импульсная модуляция), контуром 190 обратного тока управляют с помощью переключаемых ПТР 192. Например, когда ПТР 160 отключен (то есть находится в неэлектропроводном состоянии), ПТР 192 включен, обеспечивая протекание тока через контур 190 обратного тока. Такой ПТР 192 может иметь пониженные потери по сравнению с диодом 165.
Контроллер 17 подает напряжение на затвор 182 ПТР 160. Когда соответствующее напряжение подают на затвор 182, ПТР 160 включается (то есть переходит в электропроводное состояние), обеспечивая возможность протекания тока на землю и подачи питания на электродвигатель 155. Для детектирования состояния перегрузки электродвигателя, контроллер 17 подает другое, относительно низкое напряжение на затвор 182 ПТР 160, в результате чего ПТР 160 отключается, и отслеживает либо напряжение в точке А, или фильтрованное напряжение в точке В. Когда ПТР 160 отключается (то есть переключается в неэлектропроводное состояние), подача тока от источника 15 питания прерывается. Однако диод 165 обеспечивает возможность продолжения протекания тока через электродвигатель 155. При этом продолжает сохраняться напряжение противо-ЭДС, поскольку электродвигатель продолжает вращаться и сохраняется падение напряжения на сопротивлении электродвигателя в результате протекания тока. Падению этого напряжения, однако, противостоит напряжение, индуцируемое индуктивностью электродвигателя, которая пропорциональна скорости изменения тока в обмотках электродвигателя. Когда ПТР 160 отключается, напряжение, измеряемое в точке А, увеличивается до значения, которое приблизительно равно комбинации напряжения питания, и прямого падения напряжения, связанного с диодом 165 (то есть приблизительно комбинации напряжения питания и 0,7 В). Такое "фиксированное напряжение смещения диода" можно измерять до тех пор, пока не прекратится протекание тока через диод 165. Когда ток прекращает протекать, напряжение в точке А падает до уровня, который отличается от напряжения питания приблизительно на значение противо-ЭДС электродвигателя.
В тех вариантах воплощения, в которых другое устройство, такое как переключаемый ПТР, используется вместо диода, показанного на фигуре 3, фиксированное напряжение смещения будет отличаться от напряжения питания на величину, которая отличается от приблизительно 0,7 В прямого падения напряжения диода. Например, переключаемый ПТР может иметь сопротивление несколько мОм, в результате чего падение напряжения будет значительно меньше чем 0,7 В.
В некоторых вариантах воплощения контроллер 17 отслеживает не фильтрованное напряжение в точке А. Эта точка соответствует выводу электродвигателя, который отключен, когда ПТР 160 отключается. Однако сигнал в точке А может быть несколько зашумленным. Поэтому сигнал, предпочтительно, фильтруют перед его измерением. В некоторых вариантах воплощения фильтр аналогичен представленному как фильтр 170 на фиг.3. Отфильтрованный сигнал можно измерять на выходе фильтра 170 в точке В.
Фильтр 170 представляет собой резистивно-емкостной ("RC") фильтр, который инициализируется приблизительно при напряжении питания перед тем, как отслеживается напряжение в точке В. Когда в электродвигатель подают питание, контроллер 17 подает напряжение на базу транзистора 172, и транзистор 172 находится в электропроводном состоянии, а база транзистора 174 заземлена. Это позволяет току протекать через транзистор 174, и конденсатор 180 будет в заряженном состоянии. Когда питание электродвигателя 155 отключают, контроллер 17 подключает базу транзистора 172 к земле, и транзистор 172 прекращает проводить ток. Напряжение на базе транзистора 174 повышается до напряжения питания, и транзистор 174 прекращает проводить ток. В это время фильтр действует как простой RC фильтр, с полным сопротивлением, равным сумме резисторов 175 и 176. Постоянная времени этой цепи, предпочтительно, меньше, чем индуктивная постоянная времени L/R электродвигателя. Например, "L" представляет индуктивность электродвигателя 155, и "R" представляет сопротивление электродвигателя 155 и цепи обратного тока. В некоторых вариантах воплощения эта постоянная времени меньше, чем одна десятая постоянной времени L/R электродвигателя.
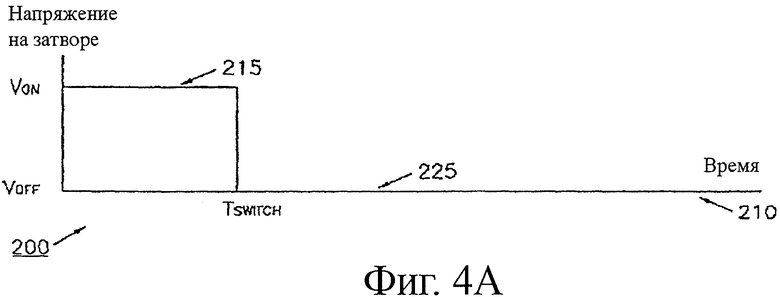
На фиг.4А и 4В иллюстрируются примерные характеристические графики (200 и 205, соответственно) напряжения цепи 150 детектирования перегрузки электродвигателя (фиг.3). На фиг.4А иллюстрируется напряжение, измеренное на затворе ПТР 160 через некоторый период времени 210, в то время как на фиг.4В иллюстрируется результат измерения напряжения в точке А после того же периода 210 времени. Этот период 210 времени соответствует времени до и после одиночного отключения электродвигателя. Как описано выше, когда первое напряжение 215 прикладывают к затвору ПТР 160 (например, VON), ПТР 160 находится в проводящем состоянии, и питание поступает в электродвигатель 155. В соответствии с этим, как показано на фиг.4В, ток электродвигателя протекает на землю, и напряжение, измеряемое в точке А, отличается от земли только на долю вольта (кривая 220) (то есть напряжение в точке А практически равно нулю). Разность между напряжением, измеренным в точке А, и землей представляет собой относительно малое напряжение (VDROP), связанное с сопротивлением ПТР, которое в некоторых случаях составляет несколько мОм.
Как снова показано на фиг.4А, второе напряжение 225 (например, VOFF) прикладывают к затвору ПТР 160 в момент времени TSWITCH. В этот момент времени ПТР 160 отключается, эффективно отключая питание электродвигателя 155. В момент времени TSWITCH, когда второе напряжение 225 прикладывают к затвору ПТР 160, напряжение, измеренное в точке А, увеличивается до фиксированного напряжения 230 смещения диода, которое, как описано выше, приблизительно равно комбинации напряжения (VS) питания и прямого падения напряжения на диоде (VFDD), как показано на фиг.4В.
Ток, который протекает через диод после отключения электродвигателя, затухает, в конечном итоге, до нуля. Когда ток больше не протекает через диод 165, напряжение, измеренное в точке А, начинает падать от значения фиксированного напряжения 230 смещения диода. В соответствии с этим, время, требуемое для падения напряжения от фиксированного напряжения 230 смещения диода, изменяется в соответствии с нагрузкой электродвигателя. Например, относительно большая нагрузка электродвигателя, по существу, требует большого тока, протекающего через электродвигатель 155. В соответствии с этим, более длительный промежуток времени требуется для отклонения напряжения от фиксированного напряжения 230 смещения диода, поскольку ток электродвигателя протекает через диод 165 в течение более длительного временного промежутка. Аналогично, при относительно меньшей нагрузке требуется более короткий промежуток времени, чтобы напряжение отклонилось от фиксированного напряжения 230 смещения диода. Поэтому более длительный промежуток времени может указывать на состояние перегрузки.
На фиг.4В показаны три временных интервала (TNORMAL) 235, (TREF) 240 и (TOVERLOAD) 245, которые соответствуют нормальному временному интервалу, опорному временному интервалу и временному интервалу перегрузки. Интервалы 235-245 представляют время, которое требуется для начала падения напряжения в точке А от фиксированного напряжения 230 смещения диода до опорного напряжения, которое в представленном случае представляет собой уровень (VS) напряжения питания (показано стрелками 246). Пунктирная линия 250 иллюстрирует электродвигатель, который работает в пределах нормальных параметров нагрузки, для чего требуется первый или нормальный интервал (TNORMAL) 235, чтобы отслеживаемое напряжение 230 упало до уровня (VS) напряжения питания. Перегруженный электродвигатель, с другой стороны, требует относительно более длительный интервал (TOVERLOAD) 245 для того, чтобы отслеживаемое напряжение 230 упало до уровня (VS) напряжения питания, как показано сплошной линией 255. Опорный временной интервал (TREF) 240 может соответствовать, например, ограничивающему критерию для определения состояния электродвигателя, находится ли электродвигатель в состоянии перегрузки.
Опорное напряжение в варианте воплощения, представленное на фиг.4В, представляет собой напряжение (VS) питания. Напряжение питания представляет собой напряжение отключенного вывода электродвигателя. В других вариантах воплощения опорное напряжение отличается от напряжения отключенного вывода электродвигателя. Например, если схема сравнения состоит из простого транзистора, отслеживаемое напряжение на фиг.4В можно сравнивать с опорным напряжением, равным напряжению питания, минус падение напряжения на диоде.
Отслеживаемое напряжение 230 в конечном итоге устанавливается на уровне, равном напряжению VS питания, минус значение 248 противо-ЭДС. Способ детектирования перегрузки в соответствии с предшествующим уровнем техники состоит в измерении этого напряжения 248 противо-ЭДС, и на основе этого измерения делают заключение о скорости и нагрузке электродвигателя. Однако время, требуемое для того, чтобы отслеживаемое напряжение достигло уровня, обозначающего значение противо-ЭДС, обычно значительно больше, чем требуется для определения нагрузки электродвигателя при использовании настоящего способа. При использовании настоящего способа, время, в течение которого питание электродвигателя отключено в условиях нормальной нагрузки, составляет TNORMAL. Измерение противо-ЭДС потребовало бы временной интервал, равный TREF, плюс дополнительное время, требуемое для того, чтобы напряжение достигло асимптотической величины, связанной с противо-ЭДС. Даже при идеальном отслеживании напряжения, это время превысило бы TNORMAL. Однако «линия» напряжения щеточного электродвигателя постоянного тока с разомкнутой цепью, в отличие от идеальной «линии», показанной на фиг.4В, представляет собой исключительно зашумленный сигнал. Измерение противо-ЭДС в этих условиях по своей сути является менее точным, чем измерение момента времени пересечения с уровнем опорного напряжения, требуемое в соответствии с настоящим изобретением. Такое ограничение может быть устранено только путем фильтрации отслеживаемого напряжения с постоянной времени, в несколько раз большей, чем обратное значение частоты переключения электродвигателя. Такая постоянная времени обычно значительно больше, чем постоянная времени фильтра 170. Такая фильтрация потребовала бы дополнительного добавления времени, необходимого для проведения измерения противо-ЭДС.
Кривая напряжения, показанная на фиг.4В, соответствует напряжению, отслеживаемому в точке А. Если используется фильтр 170, напряжение, отслеживаемое в точке В, будет отличаться от напряжения, показанного на фиг.4В, в течение времени, предшествующего TSWITCH, когда оно будет равно напряжению VS питания, минус малое падение напряжения на транзисторе. После момента TSWITCH оно приблизительно будет равно показанному на фиг.4В.
Графики напряжения, показанные на фиг.4А и 4В, соответствуют одиночному событию отключения питания, которое представляет поведение напряжения на затворе ПТР 160 и отслеживаемое напряжение 230 в случае, когда питание электродвигателя не отключено. Сплошная линия 255, показанная на фиг.4В, соответствует фактической линии напряжения для электродвигателя в состоянии перегрузки, поскольку питание электродвигателя в этом состоянии в большинстве вариантов воплощения не будет повторно включено. На фиг.4В не показано окончательное изменение напряжения противо-ЭДС при изменении скорости электродвигателя. По мере замедления вращения электродвигателя и, в конечном итоге, во время его остановки, значение 248 противо-ЭДС падает до нуля, и сплошная кривая будет постепенно приближаться к значению напряжения VS питания.
На фиг.4С и 4D показаны графики напряжения на затворе и отслеживаемого напряжения 230 для электродвигателя в условиях нормальной нагрузки, включающие событие отключения питания, показанное на фиг.4А и 4В, и событие повторной подачи питания. Когда контроллер 17 детектирует, что отслеживаемое напряжение 230 пересекает уровень опорного напряжения (в данном примере равно напряжению VS питания) в течение времени TNORMAL, которое меньше, чем опорный временной интервал TREF, как показано пунктирной линией на фиг.4В, он определяет, что электродвигатель находится в состоянии нормальной нагрузки, и поэтому повторно подключает питание электродвигателя. С этой целью подают напряжение VON на затвор ПТР 160, и ПТР возвращается в состояние проводимости. Отслеживаемое напряжение 230 снова падает до малого значения VDROP, которое соответствует сопротивлению ПТР. Такая последовательность событий, состоящая из отключения питания электродвигателя, отслеживания напряжения в точке А, фиксирование времени пересечения этого напряжения и опорного напряжения, и повторного включения электродвигателя, будет повторяться через регулярные интервалы времени, до тех пор, пока будет определяться условие нормальной нагрузки электродвигателя.
В вариантах воплощения, показанных на фиг.3, 4А и 4В, ПТР 160 используется для переключения вывода низкого напряжения электродвигателя 155. В вариантах воплощения, показанных на фиг.5, 6А и 6В, ПТР 160 переключает вывод на стороне высокого напряжения.
На фиг.5 схематично представлена система 275 детектирования перегрузки электродвигателя, которая включает в себя электродвигатель 155, источник 15 питания, ПТР 280 с р-каналом, диод 165 свободного вращения (или "обратного тока"), фильтр 283, контроллер 17 и индикатор 35 перегрузки.
Как показано на фиг.5, контроллер 17 подает напряжение на затвор 282 ПТР 280. Когда соответствующее напряжение подают на затвор 282, ПТР 280 находится в проводящем состоянии или включен (то есть находится в электропроводном состоянии), что позволяет току протекать от источника 15 питания к высоковольтному выводу электродвигателя 155. Для детектирования состояния перегрузки электродвигателя контроллер 17 увеличивает напряжение на затворе 282 ПТР 280 и отслеживает, либо напряжение в точке А, или фильтрованное напряжение в точке В. ПТР 280 выключается (то есть находится в не проводящем состоянии), прерывая, таким образом, ток от источника 15 питания. Однако диод 165 обеспечивает возможность продолжения протекания тока через электродвигатель 155. На нем сохраняется напряжение противо-ЭДС, поскольку электродвигатель продолжает вращаться и продолжается падение напряжения на сопротивление электродвигателя в результате протекания тока. Однако этому падению напряжения противодействует напряжение, индуцируемое индуктивностью электродвигателя, которое пропорционально скорости изменения тока в обмотке электродвигателя. Когда ПТР 280 отключается, напряжение, измеряемое в точке А, понижается до значения, которое приблизительно равно напряжению земли, которое принято равным 0 В, минус прямое падение напряжения на диоде 165 (то есть приблизительно -0,7 В). Такое "фиксированное напряжение смещения диода" может измеряться до тех пор, пока не прекратится протекание тока через диод 165. Когда протекание тока прекращается, напряжение в точке А повышается до уровня, который приблизительно составляет противо-ЭДС электродвигателя.
В некоторых вариантах воплощения контроллер 17 отслеживает нефильтрованное напряжение в точке А. Эта точка соответствует выводу электродвигателя, который отключен, когда ПТР 280 отключен. Однако сигнал в точке А может быть несколько зашумленным. Поэтому сигнал, предпочтительно, фильтруют перед его измерением. В некоторых вариантах воплощения фильтр аналогичен фильтру, показанному как фильтр 283 на фиг.5. Фильтруемый сигнал можно измерять на выходе фильтра в точке В.
Фильтр 283 (фиг.5) представляет собой RC фильтр, который инициируют приблизительно при напряжении земли до того, как начнется отслеживание напряжения в точке В. Когда в электродвигатель подают питание, контроллер 17 подает напряжение на базу транзистора 284. Это обеспечивает возможность протекания тока через транзистор 284, и конденсатор 287 будет в разряженном состоянии. Когда питание электродвигателя отключают, контроллер 17 переключает базу транзистора 284 на землю, и транзистор 284 прекращает проводить ток. В это время фильтр 283 действует как простой RC-фильтр с полным сопротивлением, равным сумме резисторов 285 и 286. Постоянная времени этой цепи, предпочтительно, меньше, чем индуктивная постоянная времени L/R электродвигателя 155. В некоторых вариантах воплощения эта постоянная времени меньше, чем одна десятая постоянной времени L/R электродвигателя 155.
На фиг.6А и 6В иллюстрируются примерные характеристические графики (300 и 305 соответственно) напряжения в цепи 275 детектирования перегрузки электродвигателя (фиг.5). На фиг.6А иллюстрируется измерение напряжения на затворе ПТР 280 через некоторый период 310 времени, в то время как на фиг.6В иллюстрируется измерение напряжения в точке А через тот же период 310 времени. Этот период 310 времени соответствует времени до и после одиночного отключения питания электродвигателя. Когда первое напряжение 315 подают на затвор ПТР 280 (например, VON), ПТР 280 проводит ток, и в электродвигатель 155 поступает питание. В соответствии с этим, как показано на фиг.6В, напряжение, измеряемое в точке А, отличается от напряжения питания только на долю вольта (след 320). Разность между напряжением, измеренным в точке А, и напряжением питания составляет относительно малое напряжение (VDROP), связанное с сопротивлением ПТР 280, которое в некоторых случаях составляет несколько мОм.
Как показано на фиг.6А, второе напряжение 325 (например, VOFF) подают на затвор ПТР 280 в момент времени TSWITCH. В это время ПТР 280 отключается, эффективно отключая питание электродвигателя 155. В это время TSWITCH, когда второе напряжение 325 подают на затвор ПТР 280, напряжение, измеренное в точке А (то есть отслеживаемое напряжение), понижается до фиксированного напряжения 330 смещения диода, которое, как описано выше, приблизительно равно минус прямому падению напряжения диода (VFDD), как показано на фиг.6В.
Ток, который протекает через диод после того, как питание электродвигателя 155 будет отключено, в конечном итоге затухает до нуля. Когда ток больше не протекает через диод 165, напряжение, измеренное в точке А, начинает подниматься от значения фиксированного напряжения 330 смещения диода. В соответствии с этим, время, требуемое для начала повышения напряжения от фиксированного напряжения 330 смещения диода, изменяется в зависимости от нагрузки электродвигателя. Например, относительно большая нагрузка электродвигателя, по своей сути, требует большого тока, протекающего через электродвигатель 155. В соответствии с этим, более длительный период времени необходим для того, чтобы напряжение отклонилось от фиксированного напряжения 330 смещения диода, поскольку ток в электродвигателе протекает через диод 165 в течение более длительного промежутка времени. Аналогично, относительно малая нагрузка требует более короткого промежутка времени для отклонения напряжения от фиксированного напряжения 330 смещения диода. Поэтому более длительный временной интервал может указывать на состояние перегрузки.
На фиг.6В показаны три временных интервала (TNORMAL) 335, (TREF) 340 и (TOWERLOAD) 345, которые соответствуют нормальному временному интервалу, опорному временному интервалу и временному интервалу перегрузки. Интервалы 335-345 представляют собой время, требуемое для того, чтобы напряжение, измеряемое в точке А, начало повышаться от фиксированного напряжения 330 смещения диода и достигло опорного напряжения (показано стрелками 246), которое в представленном случае равно напряжению земли или нулю. Пунктирная линия 350 представляет пример электродвигателя, который работает с нормальными параметрами нагрузки. Это соответствует первому или нормальному временному интервалу (TNORMAL) 335 повышения отслеживаемого напряжения 330 до нуля. С другой стороны, для электродвигателя в состоянии перегрузки, требуется относительно более длительный временной интервал (TOWERLOAD) 345 для того, чтобы отслеживаемое напряжение 330 повысилось до нуля, как показано сплошной линией 355. Опорный временной интервал (TREF) 340 может соответствовать, например, ограничительному критерию для определения состояния электродвигателя, находится ли электродвигатель в состоянии перегрузки.
Кривая напряжения, показанная на фиг.6В, соответствует напряжению, отслеживаемому в точке А. Если используется фильтр 283, напряжение, отслеживаемое в точке В, будет отличаться от напряжения, показанного на фиг.6В, в течение времени, предшествующего TSWITCH, когда оно будет равно напряжению земли, плюс малое падение напряжения на транзисторе. После TSWITCH оно будет приблизительно соответствовать показанному на фиг.6В.
Кривые напряжения, показанные на фиг.6А и 6В, соответствуют одиночному событию отключения питания, на которых представлено напряжение затвора ПТР 280 и отслеживаемое напряжение 230, в случае, когда питание электродвигателя повторно не включают. Сплошная линия 355, показанная на фиг.6В. соответствует фактической кривой напряжения для электродвигателя в состоянии перегрузки, поскольку питание электродвигателя в этом состоянии в большинстве вариантов воплощения не будет повторно включено. На фиг.6В не показано окончательное изменение напряжения противо-ЭДС при изменении скорости электродвигателя. По мере замедления вращения электродвигателя, и, в конечном итоге, при его остановке, значение 348 противо-ЭДС будет падать до нуля, и сплошная кривая будет постепенно приближаться к напряжению земли или нулю.
На фиг.6С и 6D показаны кривые напряжения затвора (ПТР 280) и отслеживаемого напряжения 330 для электродвигателя в нормальных условиях нагрузки, включающие событие отключения питания, показанное на фиг.6А и 6В, и событие повторного включения питания. Когда контроллер 17 детектирует, что отслеживаемое напряжение 330 пересекает уровень опорного напряжения (в данном примере, равный напряжению земли или нулю) в пределах интервала TNORMAL, который меньше, чем опорный временной интервал TREF, как показано пунктирной кривой 350 на фиг.6В, он определяет, что электродвигатель находится в нормальном состоянии нагрузки и поэтому повторно включает питание электродвигателя. С этой целью он подает напряжение VON на затвор ПТР 280, и ПТР 280 возвращается в электропроводное состояние. Отслеживаемое напряжение снова повышается до напряжения VS питания, минус малое значение VDROP, соответствующее сопротивлению ПТР 280. Такая последовательность событий, состоящая из отключения питания электродвигателя, отслеживания напряжения в точке А, фиксирования момента времени пересечения этого напряжения с уровнем опорного напряжения, и повторного включения питания электродвигателя, будет повторяться через регулярные интервалы времени, до тех пор, пока будет определяться, что электродвигатель 155 работает в условиях нормальной нагрузки.
Характеристики переключения, показанные на фиг.4А, 4С, 6А и 6С, могут изменяться в соответствии с конфигурацией ПТР 160 и 280. Поэтому различные значения напряжения можно использовать в качестве первого и второго напряжений 215, 315 и 225, 325. Например, ПТР с n-каналом можно использовать как переключатель на стороне высокого напряжения, если для повышения напряжения затвора выше напряжения питания используется подкачка зарядов. Как показано на фиг.4А, напряжение 215 затвора, которое включает ПТР 160, превышает напряжение 225, которое отключает ПТР.
На фиг.7 иллюстрируется кривая 400 крутящего момента, которая представляет взаимозависимость между крутящим моментом электродвигателя 155 и определенными временными интервалами 235-245, показанными на фиг.4В. В другом варианте воплощения другая кривая крутящего момента (не показана), которая аналогична кривой 400 крутящего момента, может быть построена для представления взаимосвязи между крутящим моментом электродвигателя 155 и определенными временными интервалами 335-345, показанными на фиг.6 В. Кривая 400 крутящего момента обычно является нелинейной. Как показано на фиг.4В, нормальный временной интервал (TNORMAL) 235 и временной интервал (TOWERLOAD) 245 перегрузки соответствуют расчетному значению крутящего момента 405 электродвигателя и крутящему моменту 410 электродвигателя в состоянии перегрузки, соответственно. В некоторых вариантах воплощения расчетный крутящий момент 405 представляет собой паспортное значение крутящего момента или, более просто, крутящий момент, который электродвигатель 155 создает в условиях нормальной работы. Крутящий момент 410 перегрузки, в качестве альтернативы, представляет собой величину крутящего момента, которая может привести к поломке электродвигателя 155. Например, если электродвигатель 155 создает крутящий момент 410 перегрузки в течение некоторого периода времени, температура электродвигателя 155 повышается, в результате чего происходит повреждение компонентов электродвигателя 155. В случае значительного повреждения происходит поломка электродвигателя 155. Опорный временной интервал (ТREF) 240 соответствует ограничивающему значению 407 крутящего момента электродвигателя. Значения крутящего момента электродвигателя, меньшие, чем это значение, могут превышать расчетное значение 405 крутящего момента, но не приводят к повреждению электродвигателя 155.
Различные варианты воплощения представлены в следующей формуле изобретения.
Изобретение относится к области электротехники и может быть использовано для детектирования состояния перегрузки электродвигателей постоянного тока. Техническим результатом является повышение точности детектирования состояния перегрузки. В одном варианте системы и способа детектирования состояния перегрузки отслеживание нагрузки электродвигателя постоянного тока включает в себя: периодическое отключение питания электродвигателя; отслеживание напряжения; и измерение временного интервала между моментом начала и моментом окончания, при этом момент начала соответствует моменту времени, когда питание электродвигателя отключают, а момент окончания соответствует моменту времени, когда отслеживаемое напряжение и опорное напряжение имеют, по существу, одно и то же значение. 3 н. и 11 з.п. ф-лы, 14 ил.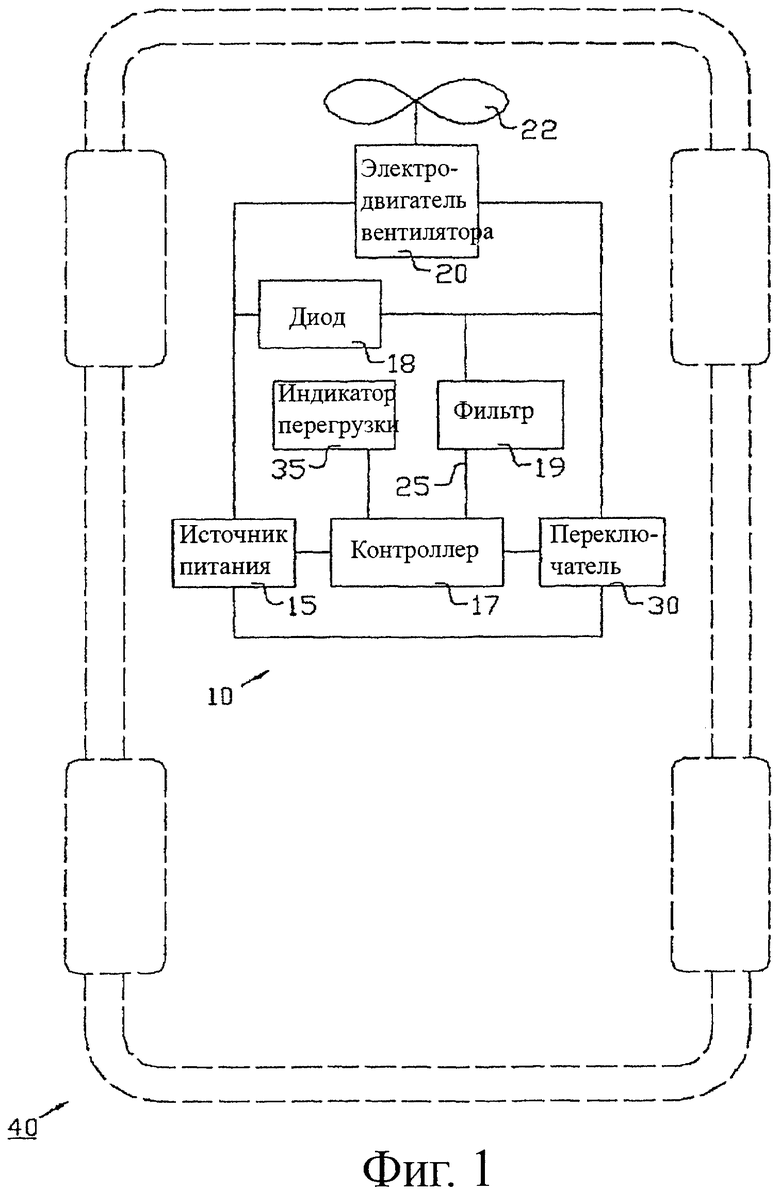
1. Способ отслеживания нагрузки электродвигателя постоянного тока с множеством выводов, характеризующийся тем, что первоначально включают питание электродвигателя и периодически выполняют последовательность действий, при этом каждая последовательность действий отделена от последующей временным промежутком, и каждая последовательность действий включает в себя следующие действия: отключают питание электродвигателя путем прерывания тока, протекающего через один из множества выводов; отслеживают напряжение; измеряют временной интервал между моментом начала и моментом окончания, при этом момент начала соответствует моменту времени, когда отключают питание электродвигателя, а момент окончания соответствует моменту времени, когда отслеживаемое напряжение и опорное напряжение имеют, по существу, одно и то же значение; сравнивают указанный временной интервал с опорным временным интервалом; и определяют, находится ли электродвигатель в состоянии перегрузки на основе указанного временного интервала, при этом временной интервал более длительный, чем опорный временной интервал, интерпретируется как состояние перегрузки, а временной интервал более короткий, чем опорный временной интервал, интерпретируется как нормальное состояние.
2. Способ по п.1, в котором указанная последовательность дополнительно включает в себя следующие действия: повторно включают питание электродвигателя, если электродвигатель находится в нормальном состоянии; и оставляют электродвигатель отключенным от питания, если электродвигатель находится в состоянии перегрузки.
3. Способ по п.1, в котором указанная последовательность дополнительно включает в себя следующие действия: повторно включают питание электродвигателя, если электродвигатель находится в нормальном состоянии; и повторно включают питание электродвигателя, если электродвигатель находится в состоянии перегрузки.
4. Способ по п.1, в котором временной промежуток между первоначальной подачей питания в электродвигатель и наиболее ранним возникновением последовательности действий соответствует времени, требуемому для ускорения электродвигателя, по существу, до его установившейся скорости, но более короткий, чем время, требуемое для окончательного повреждения электродвигателя, находящегося в состоянии перегрузки.
5. Система отслеживания нагрузки электродвигателя, выполненная с возможностью отслеживания электродвигателя постоянного тока, имеющего первый вывод электродвигателя и второй вывод электродвигателя, при этом первый и второй выводы электродвигателя выполнены с возможностью подключения к источнику питания, содержащая: переключатель, выполненный с возможностью подключения между источником питания и первым выводом электродвигателя; контур обратного тока между первым выводом электродвигателя и вторым выводом электродвигателя; и контроллер, выполненный с возможностью подключения к переключателю для приема отслеживаемого напряжения, для периодического отключения электродвигателя путем управления переключателем и для измерения интервала времени между моментом начала и моментом окончания, причем момент начала соответствует моменту времени, когда электродвигатель отключают, а момент окончания соответствует моменту времени, когда отслеживаемое напряжение и опорное напряжение имеют, по существу, одно и то же значение, при этом контроллер выполнен также с возможностью сравнивать указанный интервал времени с опорным временным интервалом.
6. Система отслеживания нагрузки по п.5, дополнительно содержащая фильтр, соединенный с первым выводом электродвигателя, при этом отслеживаемое напряжение представляет собой напряжение на выходе фильтра.
7. Система отслеживания нагрузки по п.5, в которой переключатель также используется для управления скоростью.
8. Система отслеживания нагрузки по п.5, в которой контур обратного тока содержит диод.
9. Система отслеживания нагрузки по п.5, в которой контур обратного тока содержит транзистор.
10. Система охлаждения двигателя автомобиля, содержащая: электродвигатель с первым выводом электродвигателя и вторым выводом электродвигателя, причем первый и второй выводы электродвигателя выполнены с возможностью подключения к источнику питания; вентилятор, связанный с электродвигателем, переключатель, выполненный с возможностью подключения между источником питания и первым выводом электродвигателя; контур обратного тока между первым выводом электродвигателя и вторым выводом электродвигателя; и контроллер, выполненный с возможностью подключения к переключателю для приема отслеживаемого напряжения, для периодического отключения питания электродвигателя путем управления переключателем и для измерения интервала времени между моментом начала и моментом окончания, причем момент начала соответствует моменту времени, когда электродвигатель отключают, а момент окончания соответствует моменту времени, когда отслеживаемое напряжение и опорное напряжение имеют, по существу, одно и то же значение, при этом контроллер выполнен также с возможностью сравнивать указанный интервал времени с опорным временным интервалом и определять, находится ли электродвигатель в состоянии перегрузки на основе указанного временного интервала, при этом временной интервал более длительный, чем опорный временной интервал, интерпретируется как состояние перегрузки, а временной интервал более кроткий, чем опорный временной интервал, интерпретируется как нормальное состояние.
11. Система по п.10, дополнительно содержащая фильтр, подключенный к первому выводу электродвигателя, при этом отслеживаемое напряжение представляет собой напряжение на выходе фильтра.
12. Система по п.10, в которой электродвигатель представляет собой щеточный или механически коммутируемый электродвигатель постоянного тока.
13. Система по п.10, в которой переключатель представляет собой транзистор.
14. Система по п.10, в которой переключатель также используется для управления скоростью.
| УСТРОЙСТВО ЗАЩИТЫ КОЛЛЕКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ ПЕРЕГРЕВА | 2001 |
|
RU2214665C2 |
| Устройство для защиты электродвигателя от перегрузки | 1983 |
|
SU1112476A1 |
| US 3914671 А, 21.10.1975 | |||
| US 2003210011 А1, 13.11.2003 | |||
| Устройство для регулированияТЕМпЕРАТуРы | 1979 |
|
SU800969A1 |
| JP 60051496 А, 22.03.1985. | |||

