Приоритет настоящей заявки испрашивается на основании предварительной заявки на патент США на изобретение "Способ и система для выполнения переключения в холостом режиме в устройстве беспроводной связи", №60/332492, поданной 16.11.2001г., которая включена в настоящее описание в полном объеме для сведения.
Настоящее изобретение относится, в общем, к устройствам беспроводной связи (УБС), и более конкретно к устройству беспроводной связи (УБС), способному выполнять переключение между различными пейджинговыми сигналами при работе в пейджинговой среде.
В наземной среде связи УБС может принимать сигналы связи от множества территориально разнесенных базовых станций. В спутниковой системе связи УБС может принимать сигналы связи, связанные с множеством различных лучей одного или более спутников. УБС осуществляет обмен сигналами, называемыми сигналами канала трафика, с базовыми станциями и/или спутниками, когда оно участвует в вызове, сохраняя при этом линию связи. Во время участия в вызове УБС может переключаться между различными базовыми станциями и/или спутниковыми лучами с помощью известных методов, сохраняя тем самым бесшовную зону обслуживания вызова по мере того, как УБС перемещается относительно базовых станций и/или спутниковых лучей.
Когда УБС не участвует в вызове или активной линии связи, оно может работать в холостом состоянии или режиме сохранения ресурсов. Находясь в этом состоянии, УБС может работать в пейджинговом режиме (т.е. режиме персонального вызова). В пейджинговом режиме УБС имеет возможность войти в неактивное состояние сохранения мощности и затем оставаться в нем в течение относительно длительных периодов времени. УБС периодически переходит из неактивного состояния в активное состояние на относительно короткий период времени, чтобы контролировать пейджинговые сигналы, передаваемые с базовых станций и/или связанные со спутниковыми лучами.
Часто УБС может быть не способно принимать пейджинговый сигнал, связанный с базовой станцией или лучом спутника, потому что сигнал блокирован или потому что УБС вышло из диапазона зоны обслуживания (часто называемой "сотой"), связанной с данной базовой станцией или одним или более спутниковыми лучами. В любом случае желательно, чтобы УБС сохраняло бесшовный охват для пейджинга.
Когда УБС находится в холостом режиме, пейджинговый режим обеспечивает механизм передачи сообщений в УБС по пейджинговому каналу, позволяя при этом УБС использовать неактивное состояние для уменьшения энергопотребления. Существует общая потребность использовать усовершенствованные методы для дальнейшего снижения энергопотребления в УБС, когда оно бездействует и работает в режиме пейджинга.
В основу настоящего изобретения положена задача обеспечения бесшовного охвата пейджингом для УБС, работающего в пейджинговом режиме. УБС может параллельно отслеживать/обрабатывать альтернативные пейджинговые сигналы, связанные с множеством базовых станций и/или спутниковых лучей, что позволяет обеспечить УБС бесшовным охватом пейджингом в условиях ухудшения характеристик сигнала, например во время блокирования пейджинговых сигналов или когда УБС перемещается между зонами обслуживания или областями, связанными с множеством базовых станций и/или спутниковых лучей. Бесшовный охват пейджингом достигается с помощью переключения в УБС с первого пейджингового сигнала, связанного с первой базовой станцией и/или спутниковым лучом, на второй пейджинговый сигнал, связанный со второй базовой станцией и/или спутниковым лучом.
Другой задачей изобретения является обеспечение бесшовного охвата пейджингом с одновременным уменьшением энергопотребления в УБС.
Согласно одному варианту настоящего изобретение предложен способ выполнения операции переключения в УБС, работающем в системе связи. УБС работает в холостом режиме, в котором УБС переходит между неактивным состоянием для сохранения мощности и активным состоянием для приема одного или более пейджинговых сигналов. Согласно данному способу осуществляют попытку повторно захватить первый пилот-сигнал, связанный с первым пейджинговым сигналом, который был демодулирован во время предыдущего активного состояния, и осуществляют попытку повторно захватить второй пилот-сигнал, который отслеживался во время предыдущего активного состояния. В данном способе также осуществляют переключение с первого пейджингового сигнала на второй пейджинговый сигнал, связанный со вторым пилот-сигналом, когда попытка повторного захвата первого пилот-сигнала не удалась, а попытка повторного захвата второго пилот-сигнала оказалась успешной. Согласно данному способу также демодулируют второй пейджинговый сигнал во время текущего активного состояния в результате операции переключения. Предложено устройство для выполнения этапов описанного выше варианта способа.
Согласно дополнительным аспектам изобретения УБС переходит из предыдущего активного состояния в предыдущее неактивное состояние перед попыткой повторно захватить первый пилот-сигнал и осуществляет попытку повторного захвата и этапы переключения, переходя из предыдущего неактивного состояния в текущее активное состояние. УБС содержит приемник, сконфигурированный с возможностью демодуляции первого пейджингового сигнала во время предыдущего активного состояния, который реконфигурируется для демодуляции второго пейджингового сигнала при необходимости. Обычно первый и второй пейджинговые сигналы представляют собой разделенные на тайм-слоты (временные интервалы) пейджинговые сигналы, связанные с заданным циклом тайм-слотов, и на этапе перехода из предыдущего неактивного состояния в текущее активное состояние осуществляют переход в текущее активное состояние таким образом, чтобы текущее активное состояние перекрывалось во времени с тайм-слотом цикла тайм-слотов, назначенного данному УБС.
Если данная система связи является системой связи МДКР, первый и второй пилот-сигнал расширены с использованием первого и второго кодов, причем второй код является либо кодом, отличным от первого кода, либо сдвинутой во времени версией первого кода. В этом случае при повторном захвате первого пилот-сигнала осуществляют попытку повторно захватить первый пилот-сигнал, используя первый код, а при повторном захвате второго пилот-сигнала осуществляют попытку повторно захватить второй пилот-сигнал, используя второй код. Альтернативно, второй пейджинговый сигнал расширен с помощью третьего кода, связанного со вторым кодом, и при переключении с первого пейджингового сигнала на второй пейджинговый сигнал демодулируют второй пейджинговый сигнал, используя третий код.
Предложено устройство для выполнения операции переключения в УБС, которое способно работать в холостом режиме и выполнять переходы между неактивным состоянием для сохранения энергии и активным состоянием для приема одного или более пейджинговых сигналов. Устройство содержит первое средство для выполнения попытки повторно захватить первый пилот-сигнал, связанный с первым пейджинговым сигналом, который был демодулирован во время предыдущего активного состояния; второе средство для выполнения попытки повторно захватить второй пилот-сигнал, который отслеживался во время предыдущего активного состояния; третье средство для выполнения операции переключения с первого пейджингового сигнала на второй пейджинговый сигнал, связанный со вторым пилот-сигналом, когда попытка повторно захватить первый пилот-сигнал не удалась, а попытка повторно захватить второй пилот-сигнал была успешной; и четвертое средство для демодуляции второго пейджингового сигнала во время текущего активного состояния в результате операции переключения. Первое, второе и третье средства выполняют свои соответствующие функции, когда УБС осуществляет переход из предыдущего неактивного состояния в текущее активное состояние.
Согласно дополнительным аспектам устройства первый и второй пейджинговые сигналы являются разделенными на тайм-слоты пейджинговыми сигналами, связанными с заданным циклом тайм-слотов, и УБС осуществляет переход из предыдущего неактивного состояния в текущее активное состояние таким образом, чтобы текущее активное состояние перекрывало во времени тайм-слот цикла тайм-слотов, который назначен УБС.
Если данная система связи является системой связи МДКР, первый пилот-сигнал расширен с использованием первого кода, а второй пилот-сигнал расширен с использованием второго кода, причем второй код является либо кодом, отличным от первого кода, либо сдвинутой во времени версией первого кода, и первое средство включает в себя средство для осуществления попытки повторно захватить первый пилот-сигнал, используя первый код, а второе средство содержит средство для осуществления попытки повторно захватить второй пилот-сигнал, используя второй код. Кроме того, второй пейджинговый сигнал расширен с использованием третьего кода, связанного со вторым кодом, и четвертое средство содержит средство для демодуляции второго пейджингового сигнала с использованием третьего кода.
Согласно второму варианту изобретения способ выполнения операции переключения в УБС, работающем в холостом режиме, заключается в том, что определяют во время активного состояния, что требуется осуществить переключение с первого пейджингового сигнала на второй пейджинговый сигнал, например, когда второй уровень мощности больше, чем первый уровень мощности на заданную величину; определяют во время активного состояния, следует ли отложить переключение до следующего активного состояния, и осуществляют переход из активного состояния в неактивное состояние без выполнения требуемого переключения, если определено, что следует отложить переключение. Согласно данному способу также выполняют требуемое переключение с первого пейджингового сигнала на второй пейджинговый сигнал, когда УБС переходит из неактивного состояния в следующее активное состояние. Также предложено устройство для реализации этапов второго варианта способа.
Согласно дополнительным аспектам данного способа выполняют требуемое переключение с первого пейджингового сигнала на второй пейджинговый сигнал после того, как УБС переходит из неактивного состояния в следующее активное состояние, и демодулируют второй пейджинговый сигнал во время следующего активного состояния в результате этого. В системе МДКР второй пейджинговый сигнал является сигналом с расширенным спектром, а демодуляция заключается в свертке второго пейджингового сигнала с использованием кода. В дополнение, можно определить, было ли демодулировано сообщение о пейджинговом тайм-слоте, связанное с данным пейджинговым сигналом, и осуществляют переход из активного состояния в неактивное состояние без выполнения требуемого переключения, если определено, что сообщение о пейджинговом тайм-слоте, связанное с данным пейджинговым сигналом, было демодулировано. Первый уровень мощности первого пилот-сигнала, связанного с первым пейджинговым сигналом, и второй уровень мощности второго пилот-сигнала, связанного со вторым пейджинговым сигналом, можно контролировать перед определением, что требуется выполнить переключение с первого пейджингового сигнала на второй пейджинговый сигнал путем определения необходимости переключение на основании первого и второго уровней мощности.
В других вариантах в УБС планируют переход из активного состояния в неактивное состояние и определяют в первый момент времени во время активного состояния, что требуется переключение, определяют, предшествует ли первый момент времени запланированному времени меньше, чем на заданный период времени, и осуществляют переход из активного состояния в неактивное состояние в запланированное время без выполнения требуемого переключения, если определено, что первый момент времени предшествует запланированному времени меньше, чем на заданный период времени. Обычно заданный период времени меньше, чем период времени, необходимый для выполнения требуемого переключения.
Устройство для выполнения операции переключения в УБС, работающее в холостом режиме и выполняющее переходы между неактивным состоянием для сохранения мощности и активным состоянием для получения одного или более пейджинговых сигналов, содержащее первое средство для определения во время активного состояния, что требуется переключение с первого пейджингового сигнала на второй пейджинговый сигнал, второе средство для определения во время активного состояния, следует ли отложить переключение до следующего активного состояния, и третье средство для осуществления перехода из активного состояния в неактивное состояние без выполнения требуемого переключения, когда определено, что необходимо отложить переключение.
Согласно дополнительным вариантам устройство содержит четвертое средство для выполнения требуемого переключения с первого пейджингового сигнала на второй пейджинговый сигнал после перехода УБС из неактивного состояния в следующее активное состояние, и пятое средство для демодуляции второго пейджингового сигнала во время следующего активного состояния. Если системой связи является система связи с МДКР, а второй пейджинговый сигнал является сигналом с расширенным спектром, пятое средство содержит средство для свертки второго пейджингового сигнала с использованием кода. Устройство может дополнительно содержать средство для контролирования первого уровня мощности первого пилот-сигнала, связанного с первым пейджинговым сигналом, и второго уровня мощности второго пилот-сигнала, связанного со вторым пейджинговым сигналом, и первое средство содержит средство для определения необходимости переключения на основании первого и второго уровней мощности. Первое средство дополнительно содержит средство для определения необходимости переключения, когда второй уровень мощности больше, чем первый уровень мощности на заданную величину.
В некоторых вариантах в УБС планируется переход из активного состояния в неактивное состояние в запланированное время, и первое средство содержит средство для определения в первый момент времени во время активного состояния, что требуется переключение, второе средство содержит средство для определения, предшествует ли первый момент времени запланированному времени меньше, чем на заданный период времени, и третье средство содержит средство для перехода из активного состояния в неактивное состояние в запланированное время без выполнения требуемого переключения, когда определено, что первый момент времени предшествует запланированному времени меньше, чем на заданный период времени. При этом заданный период времени меньше, чем период времени, необходимый для выполнения требуемого переключения. Второе средство может иметь средство для определения, было ли демодулировано сообщение о пейджинговом тайм-слоте, связанное с данным пейджинговым сигналом, а третье средство содержит средство для осуществления перехода из активного состояния в неактивное состояние без выполнения требуемого переключения, если определено, что было демодулировано сообщение о пейджинговом тайм-слоте, связанное с пейджинговым сигналом.
В другом варианте устройство для выполнения операции переключения в УБС, работающем в холостом режиме для перехода между неактивным состоянием и активным состоянием для приема одного или более пейджинговых сигналов, содержит демодулятор, первый палец (т.е. канал приема), второй палец, искатель и контроллер. Контроллер реагирует на искатель и способен реконфигурировать демодулятор для демодуляции второго пейджингового сигнала, когда искатель показывает, что попытка повторно захватить первый пилот-сигнал не удалась, а попытка повторно захватить второй пилот-сигнал была успешной. Искатель выполнен с возможностью совершения попытки повторно захватить первый пилот-сигнал, связанный с первым пейджинговым сигналом, который демодулировался демодулятором и отслеживался с использованием первого пальца во время предыдущего активного состояния УБС, и попытки повторно захватить второй пилот-сигнал, который отслеживался вторым пальцем во время предыдущего активного состояния.
Существенные признаки, задачи и другие преимущества настоящего изобретения станут понятны из представленного ниже подробного описания со ссылками на прилагаемые чертежи, на которых одинаковые или подобные элементы обозначены одинаковыми ссылочными номерами:
фиг.1 иллюстрирует примерный вариант системы беспроводной связи,
фиг.2 иллюстрирует примерный набор сигналов прямой линии связи, передаваемых в УБС на фиг.1,
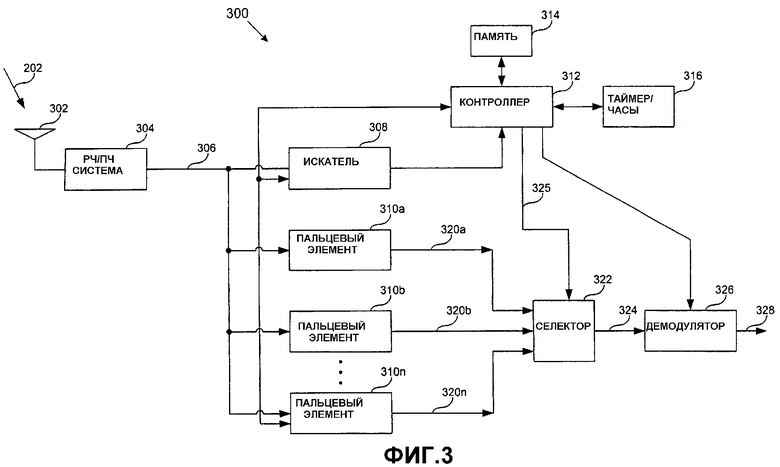
фиг.3 изображает структурную схему примерного приемника УБС, показанного на фиг.1, для обработки сигналов множественного доступа с кодовым разделением каналов (МДКР), использующихся в системе на фиг.1,
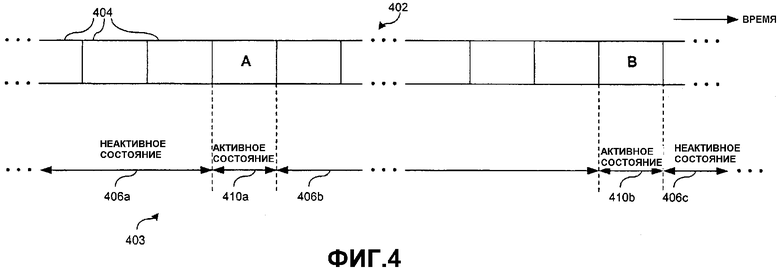
фиг.4 иллюстрирует несколько примерных временных диаграмм, полезных для описания примерной работы УБС на фиг.1 в разделенном на тайм-слоты пейджинговом режиме,
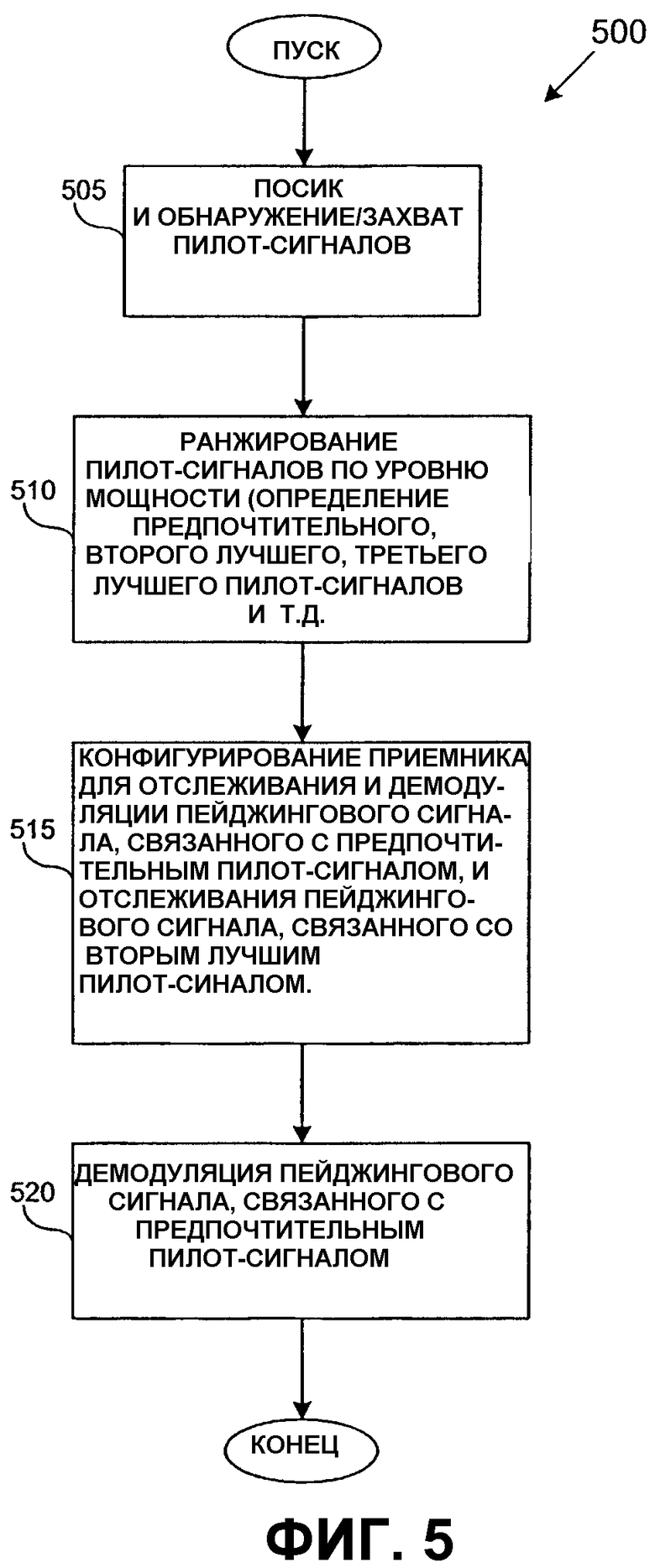
фиг.5 изображает алгоритм примерного способа, который может выполняться приемником на фиг.3 как часть захвата линии связи в системе или во время работы в разделенном на тайм-слоты режиме,
фиг.6 изображает алгоритм способа выполнения переключения в холостом режиме между сигналами в УБС на фиг.1, когда УБС находится в холостом состоянии и работает в разделенном на тайм-слоты пейджинговом режиме согласно одному варианту,
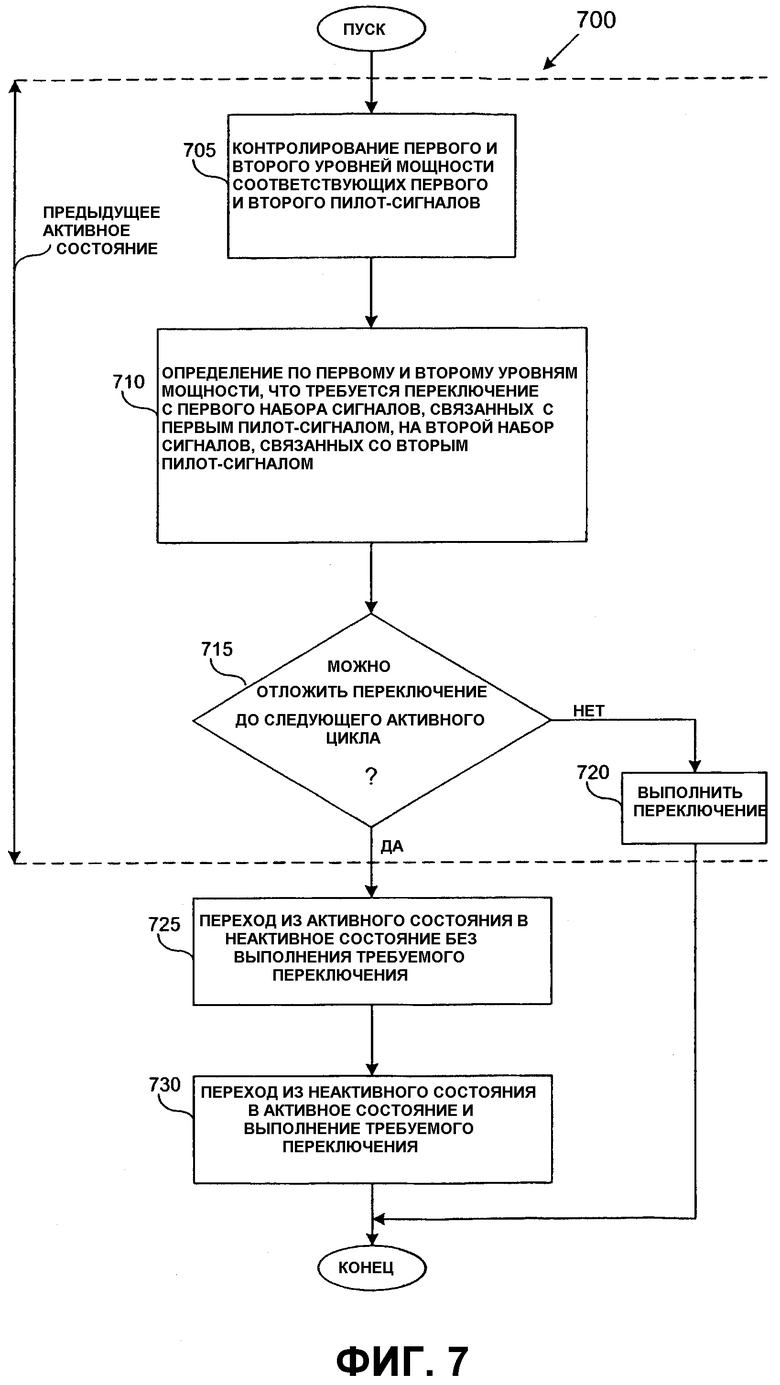
фиг.7 изображает алгоритм выполнения переключения в холостом режиме в УБС на фиг.1, когда УБС находится в холостом состоянии и работает в разделенном на тайм-слоты пейджинговом режиме согласно другому варианту.
Разработано много систем и способов связи с множественным доступом для передачи информации среди большого количества пользователей системы. Однако способы модуляции с расширением спектра, например, как используемые в системах множественного доступа с кодовым разделением каналов (МДКР), обеспечивают значительные преимущества по сравнению с другими схемами модуляции, особенно при оказании услуг связи большому количеству пользователей системы связи. Такие способы описаны в патенте США №4901307, выданном 13.02.1990г., на изобретение "Система связи с множественным доступом на основе расширения спектра с использованием спутниковых или наземных ретрансляторов", который упоминается здесь для сведения.
В то время как методы подвижной связи с МДКР стандартизованы в Соединенных Штатах Америки Ассоциацией телекоммуникационной промышленности в стандарте TIA/EIA/IS-95-A, обычно называемом IS-95, другие системы связи описаны в стандартах IMT-200/UM, или Международной системы подвижных телекоммуникаций 2000/Всемирной системы подвижных телекоммуникаций, охватывающих широкополосный МДКР (WCDMA), МДКР2000 (например, стандарты МДКР2000 1х и 3х) или TD-SCDMA.
I. Примерная коммуникационная среда
На фиг.1 представлен пример системы беспроводной связи, выполненной и работающей в соответствии с вариантами осуществления изобретения. В системе связи 100 используются методы модуляции с расширением спектра для осуществления связи с УБС 126 и 128 (также называемыми мобильными станциями и абонентскими аппаратами). В системе связи 100 можно использовать методы модуляции, описанные в упомянутом выше патенте США № 4901307. В наземных системах система связи 100 осуществляет связь с УБС 126 и 128, используя базовые станции (показанные как базовые станции 114 и 116).
В спутниковых системах система 100 связи использует спутниковые ретрансляторы (показанные как спутники 118 и 120) и системные шлюзы (показанные как шлюзы 122 и 124) для осуществления связи с УБС 126 и 128. Шлюзы 122 и 124 посылают сигналы связи в УБС 126 и 128 через спутники 118 и 120.
Каждая подвижная станция или УБС 126 и 128 имеет или представляет собой элемент/устройство беспроводной связи, такое как, без ограничения перечисленным, сотовый телефон, микротелефонная трубка, приемопередатчик данных, приемник персонального вызова или определения местоположения, или устройство пересылки информации (например, компьютеры, персональные помощники, факсимильные аппараты). Обычно такие устройства бывают в карманном или портативном исполнении, например, могут быть установлены на транспортном средстве (включая, например, легковые и грузовые автомобили, суда, поезда или самолеты) в зависимости от потребности. Хотя УБС обсуждаются как подвижные устройства, следует понимать, что существенные признаки изобретения применимы также и в стационарных аппаратах или других типах оконечных устройств, где требуется удаленное беспроводное обслуживание. Последний тип услуги особенно подходит для использования спутниковых ретрансляторов в целях установления линий связи во многих удаленных областях земного шара. В некоторых системах связи УБС могут также называться абонентскими аппаратами, подвижными аппаратами, подвижными станциями, пользовательскими терминалами, радиоустройствами или просто "абонентами", "мобильниками" или "терминалами", в зависимости от предпочтения.
В данном примере подразумевается, что спутники 118 и 120 обеспечивают множество лучей в "проекциях", которые направлены таким образом, чтобы охватывать отдельные, обычно не перекрывающиеся географические территории. Обычно для перекрытия одной и той же территории может направляться множество лучей на различных частотах, также называемых каналами МДКР, "вторичными лучами" или сигналами, мультиплексированными с разделением частоты (МРЧ), частотными интервалами, или каналами. Однако понятно, что области покрытия луча или обслуживания для различных спутников, или диаграммы направленности антенн для наземных сот-узлов могут перекрываться полностью или частично в данной области в зависимости от конфигурации системы связи и типа предоставляемой услуги. Можно также обеспечить пространственное разнесение между любыми из этих областей или устройств связи. Например, каждое из них может предоставлять услуги различным группам пользователей с различными характеристиками на разных частотах, или данный подвижный блок может использовать множество частот и/или множество поставщиков услуг, каждый из которых имеет перекрывающийся геофизический охват.
Как показано на фиг.1, в системе 100 связи обычно используется системный контроллер и коммутационная сеть 112, также называемая центром коммутации подвижной связи (ЦКПС), для наземных систем и (наземные) центры управления (НЦУ) для спутниковых систем, которые также осуществляют связь со спутниками. Такие контроллеры обычно имеют схемы сопряжения и обработки для обеспечения общесистемного управления базовыми станциями 114 и 116 или шлюзами 122 и 124 в соответствующих операциях, включая генерацию псевдошумового (ПШ) кода, распределение и синхронизацию. Контроллер 112 также управляет маршрутизацией линий связи или телефонных вызовов между телефонной сетью общего пользования (ТСОП) и базовыми станциями 114 и 116 или шлюзами 122 и 124, и УБС 126 и 128. Интерфейс ТСОП обычно образует часть каждого шлюза для прямого подключения к таким сетям или линиям связи.
Линии связи, которые соединяют контроллер 112 с различными системными базовыми станциями 114 и 116 или шлюзами 122 и 124, можно устанавливать, используя известные средства, например, без ограничения перечисленным, выделенные телефонные линии, оптоволоконные линии и СВЧ линии, или выделенные спутниковые линии связи.
Хотя на фиг.1 показано всего два спутника, в системе связи обычно используется множество спутников 118 и 120, движущихся в различных орбитальных плоскостях. Предлагался целый ряд многоспутниковых систем связи, включая системы с использованием группировок спутников на низкой околоземной орбите (НЗО) для обслуживания большого количества УБС. Однако специалистам будет понятно, что идею настоящего изобретения можно применить к различным конфигурациям наземных и спутниковых систем.
Линиями 130, 132, 134 и 136 на фиг.1 показаны некоторые из возможных трактов сигналов для линий связи между базовыми станциями 114 и 116 и УБС 126 и 128. Стрелки на этих линиях указывают примерные направления сигнала для данной линии связи, характеризуя ее как прямую или обратную линию связи, и служат только как иллюстрация, а не ограничение для действительной комбинации сигналов.
Аналогичным образом, тракты сигналов для линий связи между шлюзами 122 и 124, спутниковыми ретрансляторами 118 и 120 и УБС 126 и 128 показаны как линии 146, 148 150 и 152 для каналов шлюз-спутник и линиями 140, 142 и 144 для каналов спутник-пользователь. В некоторых конфигурациях возможно и желательно установить прямые линии связи спутник-спутник, примером которых является линия 154.
Специалистам будет понятно, что настоящее изобретение пригодно как для наземных, так и для спутниковых систем. Термины "базовая станция" и "шлюз" иногда используются как взаимозаменяемые, при этом под шлюзами подразумеваются специализированные базовые станции, которые направляют сеансы связи через спутники. Кроме того, спутники 118 и 120 будут называться в общем как спутник 118, а УБС 126 и 128 будут называться в общем как УБС 128.
II. Линии передачи сигналов
Каждый тракт или линия 130-152 сигнала, показанная на фиг.1, обычно включает в себя прямую линию связи и обратную линию связи. Каждая прямая линия связи передает набор сигналов прямой линии связи, передаваемых базовыми станциями и шлюзами 114, 116, 122 и 124 к УБС 126 и 128. И наоборот, каждая обратная линия связи передает набор сигналов обратной линии связи, передаваемых УБС 126 и 128 к базовым станциям и шлюзам 114, 116, 122 и 124. В наземной среде каждая базовая станция 114, 116 передает набор сигналов прямой линии связи.
В спутниковой среде каждый шлюз 122, 124 передает множество наборов сигналов прямой линии связи. То есть прямая линия связи разделена на множество (например, 8 или 16) лучей, а каждый луч в свою очередь делится на множество (например, 13) вторичных лучей. Каждый набор сигналов прямой линии связи связан с разным из множества упомянутых выше вторичных лучей, или каждый вторичный луч связан с набором сигналов прямой линии связи. Следовательно, каждый спутник 118, 120 передает множество вторичных лучей (т.е. множество наборов сигналов прямой линии связи) на поверхность Земли.
На фиг.2 проиллюстрирован примерный набор сигналов 200 прямой линии связи, передаваемых к УБС 128. В наземной среде сигналы 200 прямой линии связи передаются с базовой станции (например, базовой станции 114 или 116). В спутниковой среде сигналы 200 прямой линии связи передаются на спутник (например, спутник 118 или 120), а затем со спутника к УБС (например, УБС 126 или 128) на конкретном вторичном луче. Сигналы 200 прямой линии связи включают в себя один или несколько следующих сигналов: пилот-сигнал 204, сигнал синхронизации (синхросигнал) 206, связанный с пилот-сигналом, и пейджинговый сигнал 208, связанный с пилот-сигналом. Прямая линия связи может также включать в себя дополнительные сигналы, такие как сигналы трафика, которые не составляют необходимую часть данного варианта изобретения и поэтому не будут далее обсуждаться. Пилот-сигнал 204, синхросигнал 206, пейджинговый сигнал 208 и сигналы трафика также могут соответственно называться как сигнал 204 пилот-канала, сигнал 206 канала синхронизации, сигнал 208 пейджингового канала и сигналы канала трафика.
В наземной среде каждая базовая станция передает соответствующий пилот-сигнал (например, пилот-сигнал 204). Пилот-сигнал используется УБС (например, УБС 128) для вхождения в начальный системный синхронизм и обеспечения устойчивого отслеживания времени, частоты и фазы других сигналов прямой линии связи, передаваемых базовой станцией. Пилот-сигнал, передаваемый каждой базовой станцией, использует общий код расширения, такой как ПШ последовательность, но с разным фазовым сдвигом кода (например, с разным временным сдвигом), что позволяет УБС различать пилот-сигналы, передаваемые от соответствующих базовых станций.
Аналогично, в спутниковой среде каждый спутник и/или каждый шлюз может быть связан с заданным кодом, таким как ПШ последовательность, который может быть тем же самым кодом или кодом, отличным от кодов, связанных с другими спутниками (шлюзами). Каждый луч, связанный с данным спутником, включает в себя пилот-сигнал, который расширен с использованием заданного кода для данного спутника, но имеет различный фазовый сдвиг кода относительно других лучей. Поэтому УБС может различать лучи, связанные с данным спутником, и также между различными спутниками.
Синхросигнал 206 представляет собой сигнал, модулированный с расширением спектра, включая сообщения системного времени, используемые УБС 128 для захвата общего системного времени, связанного с системой 100 связи. Синхросигнал расширен с использованием такого кода, как ПШ код, который связан с кодом, использованным для расширения соответствующего пилот-сигнала 204. После захвата пилот-сигнала 206 УБС 128 захватывает синхросигнал 206, позволяя тем самым УБС синхронизировать свое внутреннее время с общим системным временем. Альтернативно, можно сохранить временную разность и использовать ее для коррекции последующей обработки, такой как кодирование, или времени передачи сигнала.
Пейджинговый сигнал 208 представляет собой модулированный с расширением спектра сигнал, используемый для передачи сообщений в УБС. Пейджинговый сигнал 208 расширен с помощью кода, такого как ПШ код, связанного с кодом, использованным для расширения соответствующего пилот-сигнала 204. Для удобства описания выше обсуждалась взаимосвязь всего одного кода с каждым из синхросигнала, пилот-сигнала и пейджингового сигнала. Однако понятно, что обычно используется один или более кодов (например, группа кодов) для расширения и/или разделения на каналы каждого из этих сигналов, и что также используется группа кодов, связанных с каждым сигналом, для синхронизации, свертки и объединения каналов этого сигнала. После синхронизации с системным временем УБС 128 может отслеживать пейджинговый сигнал 208. Система 100 связи и УБС 128 могут работать в разделенном на тайм-слоты пейджинговом режиме, используя пейджинговый сигнал 208, как будет более подробно описано ниже.
III. Приемник УБС
На фиг.3 представлена структурная схема примерного приемника 300 УБС 128 для обработки сигналов МДКР, используемых в системе 100. Приемник 300 содержит антенную систему 302 для приема радиочастотных (РЧ) сигналов прямой линии связи (таких как пилот-сигналы, синхросигналы и пейджинговые сигналы 204, 206 и 208) и для передачи этих сигналов системе 304 РЧ/промежуточной частоты (ПЧ). РЧ/ПЧ система 304 фильтрует, понижает частоту и оцифровывает РЧ сигналы и передает результирующий оцифрованный сигнал 306 в блок 308 искателя и множество каналов приема, так называемых "пальцев" приемника или пальцевых элементов 310а-310n. Искатель 308 ищет и детектирует/захватывает пилот-сигналы, входящие в состав оцифрованного сигнала 306, и передает результаты поиска в контроллер 312, подключенный к искателю, и пальцевые элементы 310. Обычно контроллер 312 содержит процессор, управляемый программой, и подключен к памяти 314. Контролер 312 также подключен к счетчику/таймеру 316, используемому для хранения времени в приемнике 300.
На основании результатов поиска/захвата сигнала, сообщенных искателем 308, контроллер 312 конфигурирует каждый палец 310 для отслеживания и, по меньшей мере, частично, свертки различных сигналов прямой линии связи (таких как один или более пейджинговых сигналов), которые наиболее вероятно принимаются приемником 300 в любое данное время. Контроллер 312 может сконфигурировать палец для отслеживания сигнала посредством подачи на палец кода (также называемого назначенным кодом), который используется пальцем для свертки отслеживаемого сигнала (также называемого назначенным сигналом), и сдвига кода назначенного сигнала. Назначенный код был использован в шлюзе для исходного расширения назначенного сигнала.
Пальцевые элементы 310 передают соответствующие свернутые сигналы 320а-320n (например, свернутые пейджинговые сигналы) в селектор/мультиплексор 322, управляемый контроллером 312. Согласно команде 325 от контроллера 312, селектор 322 маршрутизирует выбранный свернутый сигнал 320 (обозначенный как сигнал 324 на фиг.3) в демодулятор 326. Контроллер 312 конфигурирует демодулятор 326 для демодуляции назначенного сигнала, например, посредством подачи в демодулятор кода, связанного с этим сигналом, и данных времени, относящихся к фазовому сдвигу кода сигнала, подлежащего демодуляции. В ответ демодулятор 326 демодулирует выбранный свернутый сигнал 324 для получения демодулированного сигнала 328 (такого как демодулированный пейджинговый сигнал). Демодулятор 326 подает демодулированный сигнал 328 в контроллер 312.
В альтернативной компоновке приемника 300 каждый палец 310 имеет функциональные возможности демодулятора, благодаря которым каждый палец способен как отслеживать, так и демодулировать соответствующий сигнал. В этой компоновке отдельный демодулятор 326 отсутствует, а селектор 322 модифицирован таким образом, чтобы избирательно направлять один из выходных сигналов 320 пальца в контроллер 312. В другом альтернативном варианте приемника 300 искатель 308 имеет возможность как отслеживания, так и ограниченной демодуляции.
IV. Применение разделенного на тайм-слоты пейджинга
Как отмечалось выше, система 100 связи может использовать пейджинговый сигнал 208 при работе в разделенной на тайм-слоты пейджинговой среде. В такой среде УБС 128 работает в разделенном на тайм-слоты пейджинговом режиме, как отмечалось выше. Примеры использования разделенного на тайм-слоты пейджинга описаны в патентах США № 6101173 "Адаптивное время повторного захвата в разделенной на тайм-слоты пейджинговой среде" и № 6167056 "Совместное использование тайм-слота канала доступа", принадлежащих правопреемнику настоящего изобретения и упоминаемых здесь для сведения.
На фиг.4 проиллюстрировано несколько примерных временных диаграмм, полезных для описания примерной работы УБС 402 в разделенном на тайм-слоты пейджинговом режиме. На фиг.4 показана примерная временная диаграмма 402, представляющая часть пейджингового сигнала 208. Также на фиг.4 показана примерная временная диаграмма 403, соответствующая временной диаграмме 402. Временная диаграмма 403 представляет периоды времени, соответствующие различным рабочим состояниям УБС 128 во время разделенного на тайм-слоты пейджингового режима. Пейджинговый сигнал 208 (также называемый "разделенный на тайм-слоты пейджинговый сигнал 208") разделен во времени на повторяющийся цикл тайм-слотов 404, как показано на фиг.4. Каждому УБС в опросно-вызывном диапазоне пейджингового сигнала 208 (например, УБС 128) обычно назначается для контролирования один тайм-слот в каждом цикле тайм-слотов. Шлюз может передавать сообщения в намеченный УБС во время тайм-слота, назначенного этому УБС. Например, на фиг.4 примерный тайм-слот А представляет собой такой назначенный тайм-слот во время первого (или предыдущего) цикла тайм-слотов, а примерный тайм-слот В представляет собой назначенный тайм-слот во время второго (или текущего) цикла тайм-слотов.
УБС 128 контролирует назначенные или указанные тайм-слоты (например, тайм-слоты А и В) пейджингового сигнала 208, когда УБС находится в "холостом" режиме. УБС считается находящимся в холостом режиме, когда оно захватило систему связи, синхронизировалось с системным временем системы связи и поэтому способно установить сеанс связи с базовой станцией или шлюзом, но такого сеанса связи нет. В холостом режиме и при работе в разделенном на тайм-слоты пейджинговом режиме УБС 128 входит в "неактивное" состояние (также называемое "неактивным циклом") и остается в нем во время всех не назначенных тайм-слотов пейджингового сигнала 208.
На фиг.4 УБС 128 находится в неактивном состоянии в течение периодов 406а, 406b и 406с времени, соответствующих тайм-слотам пейджингового сигнала 208, которые не назначены УБС 128 (т.е. соответствуют неназначенным тайм-слотам). Неактивное состояние снижает энергопотребление в УБС за счет вхождения в режим энергосбережения, который может включать в себя снятие мощности с одного или более компонентов УБС, например компонентов, используемых для передачи сигналов шлюзу и приема сигналов с него. В неактивном состоянии УБС не принимает пилот-сигнал и не демодулирует пейджинговый сигнал. Однако для сохранения временной синхронизации, внутренние часы или таймер УБС (например, таймер 316) сохраняют время.
Когда наступает время контролировать назначенный тайм-слот, например, тайм-слот А или В, УБС 128 переходит из неактивного состояния в "активное" состояние (также называемое "активный цикл") для приема и демодуляции пейджингового сигнала (например, пейджингового сообщения, включенного в пейджинговый сигнал) во время назначенного тайм-слота. На фиг.4 УБС находится в активном состоянии в течение периодов 410а и 410b времени, соответствующих назначенным тайм-слотам А и В. После истечения периода времени, соответствующего назначенному тайм-слоту, УБС переходит из активного состояния обратно в неактивное состояние. Таким образом, УБС многократно совершает цикл между неактивным и активным состояниями при работе в разделенном на тайм-слоты пейджинговом режиме.
V. Способы
На фиг.5 представлен алгоритм выполнения примерного способа 500, который может выполняться приемником 300 как часть захвата системы связи. Способ 500 можно также выполнять, когда приемник 300 находится в активном состоянии и контролирует назначенный тайм-слот (например, тайм-слот А) на наличие пейджинговых сообщений. Приемник 300 может выполнять способ 500 в качестве предшественника для выполнения любого из способов настоящего изобретения, описанных ниже в связи с фиг.6 и 7.
На первом этапе 505 способа 500 искатель 308 захватывает один или более пилот-сигналов, принимаемых УБС 128. Искатель 308 определяет уровень мощности каждого захваченного пилот-сигнала во время процесса захвата пилот-сигнала. Для захвата (или повторного захвата) пилот-сигнала искатель 308 ищет в сигнале 306 пилот-сигнал согласно заданному окну поиска. Окно поиска определяет, например, код, использованный для расширения захватываемого пилот-сигнала, диапазон фазовых сдвигов кода, подлежащего поиску, и диапазон частотных сдвигов (например, сдвигов доплеровской частоты), подлежащий поиску. Иногда каждое такое окно рассматривают как содержащее гипотезу для каждого параметра поиска (кода, сдвига, частоты). Захват (или повторный захват) пилот-сигнала с использованием окна поиска включает в себя следующие примерные этапы:
(а) коррелируют сигнал 306 с кодом, связанным с данным пилот-сигналом (т.е. использованным для расширения пилот-сигнала), подлежащим захвату, на различных фазовых сдвигах ПШ кода,
(b) интегрируют энергию, полученную при корреляции, для каждого из различных фазовых сдвигов кода, и
(с) определяют, не превышает ли интегрированная энергия для каждого из сдвигов кода заданный порог, чтобы идентифицировать (или, по меньшей мере, начать идентифицировать) оптимальный или наиболее вероятно вероятный фазовый сдвиг кода.
Описанные выше этапы позволяют искателю 308 идентифицировать (или, по меньшей мере, начать идентифицировать) наиболее вероятный и вероятный фазовый сдвиг коды пилот-сигнала и тем самым ввести приемник 300 в начальный синхронизм с кодом, использованным для расширения данного пилот-сигнала.
Допустим, что на этапе 505 были захвачены по меньшей мере два пилот-сигнала, на следующем этапе 510 искатель 308 ранжирует эти по меньшей мере два захваченных пилот-сигнала согласно их уровням мощности. То есть искатель 308 определяет лучший или предпочтительный пилот-сигнал, имеющий самый высокий уровень мощности среди захваченных пилот-сигналов, и второй лучший пилот-сигнал, имеющий следующий самый высокий уровень мощности среди захваченных пилот-сигналов, и так далее. Искатель 308 сообщает результаты этапов 505 и 510, такие как уровни мощности и/или ранги пилот-сигналов, в контроллер 312.
На следующем этапе 515 контроллер 312 конфигурирует приемник 300 для отслеживания и демодуляции определенных сигналов в соответствии с результатами, сообщенными искателем 308. Например, контроллер 312 конфигурирует первый из пальцев 310 (например, палец 310а) для отслеживания и частичной свертки пейджингового сигнала, связанного с предпочтительным пилот-сигналом. Контроллер 312 также конфигурирует второй из пальцев 310 (например, палец 310b) для отслеживания и частичной свертки второго пейджингового сигнала, связанного со вторым лучшим пилот-сигналом. В ответ первый и второй пальцы соответственно отслеживают и частично свертывают предпочтительный пейджинговый сигнал и второй лучший пейджинговый сигнал, чтобы соответственно получить первый и второй выходные сигналы пальцев (например, сигналы 320а и 320b). Палец использует назначенный код для отслеживания и частичной свертки назначенного сигнала, такого как пейджинговый сигнал, который свернут с использованием назначенного кода. Палец отслеживает фазовый сдвиг кода назначенного сигнала, частотный сдвиг (например, доплеровский сдвиг частоты) назначенного сигнала и временной сдвиг назначенного сигнала.
На этапе 515 контроллер 312 также конфигурирует селектор 322 для маршрутизации выходного сигнала, выработанного первым пальцем (например, сигнала 320а), в демодулятор 326, так как первый палец отслеживает пейджинговый сигнал, связанный с предпочтительным пилот-сигналом. Контроллер 312 также конфигурирует демодулятор 326 для демодуляции первого пейджингового сигнала.
На следующем этапе 520 демодулятор 326 демодулирует выходной сигнал первого пальца для получения демодулированного сигнала (например, демодулированного пейджингового сигнала). Демодулятор 326 может использовать назначенный код, связанный с подлежащим демодуляции сигналом, чтобы выполнить дальнейшую свертку назначенного сигнала. Например, это может быть ПШ код или ортогональный канализирующий или покрывающий код.
На фиг.6 показан алгоритм примерного способа 600 выполнения переключения в холостом режиме между сигналами в приемнике 300 УБС 128, когда УБС находится в холостом режиме и работает в разделенном на тайм-слоты пейджинговом режиме. Так как переключение выполняется в приемнике 300, когда УБС 128 находится в холостом режиме, данное переключение называется "переключение в холостом режиме".
Допустим, что перед началом выполнения способа существуют следующие условия. Во-первых, приемник 300 захватил предпочтительный пилот-сигнал и следующий лучший пилот-сигнал и сконфигурировал себя для демодуляции пейджингового сигнала, связанного с предпочтительным пилот-сигналом, и отслеживания пейджингового сигнала, связанного со следующим лучшим пилот-сигналом, во время активного цикла, имевшего место до начала выполнения способа 600. Активный цикл, имевший место до начала выполнения способа 600, называется "предыдущий активный цикл", и поэтому предпочтительный пилот-сигнал и следующий лучший пилот-сигнал, захваченный во время предыдущего активного цикла, называются аналогично как "предыдущий предпочтительный" и "предыдущий следующий лучший пилот-сигнал". Для установления вышеупомянутых условий в УБС 128 можно выполнить способ 500. Во-ворых, предполагается, что УБС 128 находится в неактивном состоянии как раз перед началом выполнения способа 600.
На первом этапе 605 способа 600 искатель 308 пытается повторно захватить предыдущий предпочтительный пилот-сигнал. Иными словами, искатель 308 делает попытку повторно захватить пилот-сигнал, связанный с пейджинговым сигналом, который был демодулирован УБС во время предыдущего активного состояния.
Если искатель 308 успешно повторно захватывает предыдущий предпочтительный пилот-сигнал, то процесс или способ переходит к этапу 610. На этапе 610 контроллер 312 сохраняет такую же конфигурацию приемника, как использовалась во время предыдущего активного состояния, позволяя тем самым приемнику продолжать отслеживать и демодулировать пейджинговый сигнал, связанный с предыдущим предпочтительным пилот-сигналом.
На следующем этапе 615 искатель 308 пытается повторно захватить предыдущий следующий лучший пилот-сигнал (также называемый как "предыдущий резервный пилот-сигнал").
На следующем этапе 620 демодулятор 316 демодулирует предыдущий предпочтительный пейджинговый сигнал.
Возвратимся снова к первому этапу 605: если попытка повторно захватить предыдущий предпочтительный пилот-сигнал не удалась, то есть предыдущий предпочтительный пилот-сигнал невозможно повторно захватить, обработка способа переходит к этапу 625. Невозможность повторно захватить предыдущий предпочтительный пилот-сигнал может быть обусловлена блокированием сигнала или тем, что УБС больше не находится в зоне обслуживания, связанной с предыдущим предпочтительным пилот-сигналом. На этапе 625 искатель 308 делает попытку повторно захватить предыдущий резервный пилот-сигнал. Если предыдущий резервный пилот-сигнал повторно захватить невозможно, это означает, что ни предыдущий предпочтительный пилот-сигнал, ни предыдущий резервный пилот-сигнал невозможно захватить снова, и процесс переходит к этапу 630 исходного повторного захвата системы.
Если же предыдущий резервный пилот-сигнал был успешно захвачен на этапе 625, обработка переходит к этапу 635. На этапе 635 в УБС 128 выполняется операция переключения в холостом режиме. Для осуществления переключения в холостом режиме контроллер 312 реконфигурирует приемник 300 для отслеживания и демодуляции предыдущего резервного пейджингового сигнала (то есть пейджингового сигнала, связанного с предыдущим резервным пилот-сигналом). Например, контроллер 308 реконфигурирует селектор 322 и демодулятор 326 таким образом, чтобы можно было демодулировать предыдущий резервный пейджинговый сигнал вместо пейджингового сигнала, связанного с предыдущим предпочтительным пейджинговым сигналом.
На следующем этапе 640 демодулируется предыдущий резервный пейджинговый сигнал. УБС 128 использует переключение в холостом режиме для достижения бесшовного пейджингового охвата в том случае, если произойдет блокирование сигнала относительно первого пейджингового сигнала, или когда УБС выходит из диапазона относительно первого пейджингового сигнала.
Способ 600 будет дополнительно проиллюстрирован на следующем примере. Снова со ссылкой на фиг.4 допустим в этом примере, что:
1. Во время периода 410а активного цикла (представляющего предыдущий активный цикл) УБС 128 принимает первый набор сигналов прямой линии связи, связанный с первым лучом В1 от первого спутника S1, и второй набор сигналов прямой линии связи, связанный со вторым лучом В2 второго спутника S2.
2. Во время периода 410а активного цикла УБС 128 выполняет способ 500 для установления пилот-сигнала, связанного с первым набором сигналов (луча В1), как предпочтительного пилот-сигнала, и пилот-сигнала, связанного со вторым набором сигналов (луча В2), как следующего лучшего (т.е. резервного) пилот-сигнала, при этом первый набор сигналов обозначается как предпочтительный набор сигналов, а второй набор сигналов обозначается как следующий лучший (т.е. резервный) набор сигналов.
3. В конце периода 410а активного цикла палец 310а конфигурируется для отслеживания сигналов в первом наборе сигналов, палец 310b конфигурируется для отслеживания сигналов во втором наборе сигналов, и селектор 322 выбирается для маршрутизации сигнала 320а из пальцевого элемента 310а в демодулятор 326, при этом демодулятор 326 демодулирует сигналы в первом наборе сигналов.
4. УБС 128 переходит из активного цикла, соответствующего периоду 410а времени, в неактивный цикл, соответствующий периоду 406b времени, и
5. УБС 128 выполняет способ 600, переходя из неактивного цикла, соответствующего периоду 406b времени, в активный цикл, соответствующий периоду 410b времени (представляющему текущий активный цикл).
Допустим, что на начальном этапе 605 искатель 308 не может повторно захватить пилот-сигнал, связанный с первым набором сигналов (луча В1). Также допустим, что на этапе 625 искатель 308 захватывает пилот-сигнал, связанный с лучом В2. В таких обстоятельствах УБС 128 выполняет переключение в холостом режиме на этапе 635 с первого набора сигналов (т.е. от луча В1) на второй набор сигналов (т.е. от луча В2), тем самым позволяя УБС демодулировать пейджинговый сигнал, связанный со вторым набором сигналов (от луча В2). Например, контроллер 312 реконфигурирует селектор 322 для маршрутизации сигнала 320b вместо сигнала 320а в демодулятор 326, в результате чего демодулятор демодулирует пейджинговый сигнал, связанный с лучом В2.
На фиг.7 показан алгоритм примерного способа 700 выполнения переключения в холостом режиме в УБС 128 согласно другому варианту настоящее изобретения. Операция переключения в холостом режиме, например, описанная выше в связи с фиг.6, требует конечного количества времени для ее выполнения. Согласно способу 700 переключение в холостом режиме начинается только во время активного цикла и если только выполнены заданные условия. В противном случае, переключение отклоняется, т.е. откладывается до начала следующего активного цикла. Таким образом, можно сократить активный цикл для сохранения мощности. Кроме того, данный способ может предотвратить влияние переключения на запланированный конец активного цикла и, возможно, его продление, и тем самым сохранить мощность.
Способ 700 занимает, по меньшей мере, два цикла УБС 128, при этом этапы 705, 710, 715 и 720 выполняются во время текущего активного цикла, а этап 730 выполняется во время следующего активного цикла. Допустим, что предпочтительный пилот-сигнал и резервный пилот-сигнал уже были установлены до начала способа 700.
На начальном этапе 705 искатель 308 контролирует первый уровень мощности предпочтительного пилот-сигнала и второй уровень мощности резервного пилот-сигнала. На следующем этапе 710 искатель/контроллер 312 определяет на основании первого и второго уровней мощности, полученных на этапе 705, что требуется выполнить переключение с первого набора сигналов прямой линии связи, связанного с первым пилот-сигналом, на второй набор сигналов прямой линии связи, связанный со вторым пилот-сигналом. Например, приемник 300 может определить, что требуется переключение, когда уровень мощности резервного пилот-сигнала превосходит уровень мощности предпочтительного пилот-сигнала на заданную величину.
На следующем этапе 715 решения контроллер 312 определяет, можно ли отложить требуемое переключение до следующего активного цикла. Если переключение можно отложить, то обработка переходит к этапу 725. На этапе 725 УБС 128 переходит из активного состояния в неактивное состояние без выполнения требуемого переключения.
На следующем этапе 730 УБС переходит из неактивного состояния в активное состояние и выполняет требуемое переключение во время этого перехода или после него. Например, УБС 128 может переходить из неактивного состояния в активное, а затем выполнять требуемое переключение сразу после перехода. Переключение, упомянутое на этапе 725 и 730, аналогично переключению, выполняемому на этапе 635, в том, что приемник 300 УБС 129 реконфигурируется для демодуляции пейджингового сигнала, связанного со вторым пилот-сигналом. В одном из вариантов второй пейджинговый сигнал подобно первому пейджинговому сигналу является разделенным на тайм-слоты пейджинговым сигналом, связанным с циклом тайм-слотов, который назначен данному УБС, и УБС переходит из неактивного состояния в следующее активное состояние таким образом, что следующее активное состояние перекрывается во времени с одним тайм-слотом цикла тайм-слотов.
Описанный выше этап 715 (т.е. этап определения, можно ли отложить требуемое переключение) можно выполнять в соответствии с разными компоновками или вариантами изобретения. В первой примерной компоновке предполагается, что на этапе 710 было определено, что переключение требуется в первый момент времени tH. Также предполагается, что в УБС 128 запланирован переход в неактивное состояние (из текущего активного состояния) в запланированный момент времени tS. При работе с такими предположениями на этапе 715 определяют, меньше ли первый момент времени tH (из этапа 710), чем заданный период времени перед запланированным моментом времени tS (когда УБС 128 должен перейти в неактивное состояние). Заданный период времени выбирается таким образом, чтобы он был меньше или равен периоду времени, необходимому для выполнения переключения (т.е. конечному количеству времени, которое занимает переключение). Если первый момент времени tH происходит перед (т.е. предшествует) запланированным временем tS меньше, чем за заданный период времени, то переключение откладывается и обработка переходит к этапу 725. Это препятствует вмешательству переключения в запланированный конец текущего активного цикла и его возможному продлению.
Во второй примерной компоновке на этапе 715 определяют во время текущего активного цикла, было ли полностью демодулировано сообщение о пейджинговом тайм-слоте, связанное с пейджинговым сигналом, принимаемым в текущем активном цикле. Если сообщение было полностью демодулировано и, следовательно, захвачено УБС 128, то УБС больше не должно оставаться в активном состоянии. Следовательно, обработка переходит к этапу 725, и УБС 128 переходит из активного состояния в неактивное состояние без выполнения требуемого переключения, так как было захвачено сообщение о пейджинговом тайм-слоте.
VI. Контроллер компьютера УБС
Существенные признаки настоящего изобретения можно реализовать и/или управлять ими с помощью процессора/контроллера 312, который фактически представляет собой компьютерную систему. Такая компьютерная система содержит, например, один или более процессоров и/или схем или логических элементов, подключенных к коммуникационной шине. Хотя для реализации настоящего изобретения можно использовать специализированное телекоммуникационное оборудование, для полноты описания в дальнейшем будет раскрыта универсальная компьютерная система.
Компьютерная система может также содержать главную память, предпочтительно оперативное запоминающее устройство (ОЗУ), а также вторичную память и/или другую память. Вторичная память может быть, например, накопителем на жестких магнитных дисках и/или накопителем со сменным носителем. Накопитель со сменным носителем осуществляет считывание и/или запись на сменный носитель известным способом. Сменный носитель представляет собой дискету, магнитную ленту, оптический диск и т.п., с которых может производиться считывание и на которые может осуществлять запись накопитель со сменным носителем. Сменный носитель включает в себя используемую компьютером запоминающую среду, хранящую компьютерные программы и/или данные.
Вторичная память может включать в себя другие подобные средства, позволяющие загружать компьютерные программы или другие инструкции в компьютерную систему. Такие средства могут включать в себя, например, сменный носитель и интерфейс. В качестве примера можно назвать программный картридж и интерфейс для картриджа (например, как в устройствах для видеоигр), съемный кристалл памяти (такой как ЭППЗУ или ППЗУ) и связанное с ним гнездо, а также другие сменные носители и интерфейсы, которые позволяют пересылать программы и данные со сменного носителя в компьютерную систему. Вторичная память может также включать в себя постоянную память, например, флэш-память.
Компьютерная система может также иметь коммуникационный интерфейс. Интерфейс позволяет передавать программы и данные между компьютерной системой и внешними устройствами. Программы и данные, передаваемые через интерфейс, имеют форму сигналов, которые могут быть электронными, электромагнитными, оптическими или другими сигналами, пригодными для приема интерфейсом. Как показано на фиг.3, процессор 312 способен осуществлять связь с памятью 314 для хранения информации. Процессор 312 вместе с другими компонентами приемника 300, обсуждавшегося в связи с фиг.3, выполняет способы согласно изобретению.
В данном контексте термины "компьютерная программная среда" и "используемая компьютером среда", в общем, относятся к такой среде, такой как съемное запоминающее устройство, съемный кристалл памяти (например, ЭППЗУ или ППЗУ) в составе УБС 128 и к сигналам. Компьютерные программные продукты - это средства предоставления программ в компьютерную систему.
Компьютерные программы (также именуемые как компьютерная управляющая логика) хранятся в главной памяти и/или вторичной памяти. Компьютерные программы можно также получать через коммуникационный интерфейс. Такие компьютерные программы при исполнении позволяют компьютерной системе реализовать определенные существенные признаки изобретения, описанные выше. Например, в таких компьютерных программах можно реализовать признаки алгоритмов, показанных на фиг.5, 6 и 7. В частности, компьютерные программы при исполнении позволяют процессору 312 выполнять и/или вызывать выполнение признаков настоящего изобретения. Соответственно, такие компьютерные программы представляют собой контроллеры компьютерной системы УБС 128, а значит и контроллеры УБС. Таким образом, компьютерные программы управляют, например, описанным выше переключением УБС 128 в холостом режиме.
Если изобретение реализуется с использованием программного обеспечения, его можно хранить в компьютерном программном продукте и загружать в компьютерную систему с помощью накопителя для сменных носителей, кристаллов памяти или коммуникационного интерфейса. Управляющая логика (программа) при исполнении процессором 312 предписывает процессору 312 выполнять определенные функции изобретения, которые были описаны выше.
Признаки изобретения могут быть также или альтернативно реализованы в основном аппаратными средствами с использованием, например, таких аппаратных компонентов, как интегральные схемы прикладной ориентации. Аппаратная реализация конечного автомата для выполнения описанных функций будет очевидна для специалистов в данной области.
Предшествующее описание предпочтительных вариантов изобретения позволит любому специалисту реализовать или использовать настоящее изобретение. Хотя изобретение было конкретно проиллюстрировано и описано со ссылкой на его предпочтительные варианты, понятно, что можно внести различные изменения в форму и детали, не выходя за рамки изобретательского замысла.
VII. Выводы
Настоящее изобретение было описано выше с помощью функциональных конструктивных блоков, иллюстрирующих выполнение конкретных функций и взаимосвязей. Границы этих функциональных конструктивных блоков были определены произвольно для удобства описания. Можно определить альтернативные границы, если только указанные функции и взаимосвязи будут выполняться соответствующим образом. Любые такие альтернативные границы подпадают под объем притязаний заявленного изобретения. Специалистам будет понятно, что эти функциональные конструктивные блоки можно реализовать с помощью отдельных компонентов, интегральных схем прикладной ориентации, процессоров, выполняющих соответствующие программы, и т.п. или любой их комбинации. Следовательно, объем настоящего изобретения не ограничивается какими-либо описанными выше примерными вариантами и определяется только следующей формулой изобретения и эквивалентными существенными признаками.


Заявленное изобретение относится к устройствам беспроводной связи (УБС), которое взаимодействует с системой связи с множественным доступом на основе кодового разделения каналов (МДКР). Техническим результатом является обеспечение бесшовного охвата пейджингом для УБС, работающего в пейджинговом режиме, с одновременным уменьшением энергопотребления в УБС. Для этого УБС работает в холостом режиме, в котором оно переходит между неактивным состоянием для сохранения мощности и активным состоянием для приема одного или более пейджинговых сигналов. УБС совершает попытку повторно захватить первый пилот-сигнал, связанный с первым пейджинговым сигналом, который был ранее демодулирован, и вторым пилот-сигналом, который ранее отслеживался. УБС выполняет переключение с первого пейджингового сигнала на второй пейджинговый сигнал, связанный со вторым пилот-сигналом, когда попытка повторно захватить первый пилот-сигнал не удалась, а попытка повторно захватить второй пилот-сигнал оказалась успешной. 5 н. и 21 з.п. ф-лы, 7 ил.
a) осуществляют попытку повторно захватить первый пилот-сигнал, связанный с первым пейджинговым сигналом, который был демодулирован во время предыдущего активного состояния,
b) осуществляют попытку повторно захватить второй пилот-сигнал, который отслеживался во время предыдущего активного состояния, когда попытка захватить первый пилот-сигнал не удалась,
c) выполняют переключение с первого пейджингового сигнала на второй пейджинговый сигнал, связанный со вторым пилот-сигналом, когда попытка повторного захвата первого пилот-сигнала не удалась, а попытка повторного захвата второго пилот-сигнала оказалась успешной, и
d) демодулируют второй пейджинговый сигнал во время текущего активного состояния в результате операции переключения.
перед этапом а) переходят из предыдущего активного состояния в предыдущее неактивное состояние, и
выполняют этапы (а), (b) и (с) при переходе из предыдущего неактивного состояния в текущее активное состояние.
на этапе (а) осуществляют попытку повторно захватить первый пилот-сигнал, используя первый код, и
на этапе (b) осуществляют попытку повторно захватить второй пилот-сигнал, используя второй код.
a) определяют во время активного состояния, что требуется осуществить переключение с первого пейджингового сигнала на второй пейджинговый сигнал,
b) определяют во время активного состояния, следует ли отложить переключение до следующего активного состояния, и
c) осуществляют переход из активного состояния в неактивное состояние без выполнения требуемого переключения, если определено, что следует отложить переключение,
при этом УБС запланировано для перехода из активного состояния в неактивное состояние в запланированное время, и при этом
на этапе (а) определяют в первый момент времени во время активного состояния, что требуется переключение,
на этапе (b) определяют, предшествует ли первый момент времени запланированному времени меньше, чем на заданный период времени, и
на этапе (с) осуществляют переход из активного состояния в неактивное состояние в запланированное время без выполнения требуемого переключения, когда определено, что первый момент времени предшествует запланированному времени меньше, чем на заданный период времени.
d) выполняют требуемое переключение с первого пейджингового сигнала на второй пейджинговый сигнал после того, как УБС перейдет из неактивного состояния в следующее активное состояние, и
е) демодулируют второй пейджинговый сигнал во время следующего активного состояния в результате этапа d.
перед этапом (а) контролируют первый уровень мощности первого пилот-сигнала, связанного с первым пейджинговым сигналом, и второй уровень мощности второго пилот-сигнала, связанного со вторым пейджинговым сигналом, и
на этапе (а) определяют, что требуется переключение, на основании первого и второго уровней мощности.
на этапе (b) определяют, было ли демодулировано сообщение о пейджинговом тайм-слоте, связанное с пейджинговым сигналом, и
на этапе (с) осуществляют переход из активного состояния в неактивное состояние без выполнения требуемого переключения, когда определено, что было демодулировано сообщение о пейджинговом тайм-слоте, связанное с данным пейджинговым сигналом.
первое средство для выполнения попытки повторно захватить первый пилот-сигнал, связанный с первым пейджинговым сигналом, который был демодулирован во время предыдущего активного состояния,
второе средство для выполнения попытки повторно захватить второй пилот-сигнал, который отслеживался во время предыдущего активного состояния, когда попытка повторно захватить первый пилот-сигнал не удалась,
третье средство для выполнения операции переключения с первого пейджингового сигнала на второй пейджинговый сигнал, связанный со вторым пилот-сигналом, когда попытка повторно захватить первый пилот-сигнал не удалась, а попытка повторно захватить второй пилот-сигнал была успешной, и
четвертое средство для демодуляции второго пейджингового сигнала во время текущего активного состояния в результате операции переключения.
первое средство включает в себя средство для осуществления попытки повторно захватить первый пилот-сигнал, используя первый код, и
второе средство содержит средство для осуществления попытки повторно захватить второй пилот-сигнал, используя второй код.
первое средство для определения во время активного состояния, что требуется переключение с первого пейджингового сигнала на второй пейджинговый сигнал,
второе средство для определения во время активного состояния, следует ли отложить переключение до следующего активного состояния, и
третье средство для осуществления перехода из активного состояния в неактивное состояние без выполнения требуемого переключения, когда определено, что следует отложить переключение,
при этом УБС запланировано на переход из активного состояния в неактивное состояние в запланированное время, и при этом первое средство содержит средство для определения в первый момент времени во время активного состояния, что требуется выполнить переключение,
второе средство содержит средство для определения, предшествует ли первый момент времени запланированному времени меньше, чем на заданный период времени, и
третье средство содержит средство для перехода из активного состояния в неактивное состояние в запланированное время без выполнения требуемого переключения, когда определено, что первый момент времени предшествует запланированному времени меньше, чем на заданный период времени.
четвертое средство для выполнения требуемого переключения с первого пейджингового сигнала на второй пейджинговый сигнал после перехода УБС из неактивного состояния в следующее активное состояние, и
пятое средство для демодуляции второго пейджингового сигнала во время следующего активного состояния.
при этом первое средство содержит средство для определения необходимости переключения на основании первого и второго уровней мощности.
второе средство содержит средство для определения, было ли демодулировано сообщение о пейджинговом тайм-слоте, связанное данным пейджинговым сигналом, и
третье средство содержит средство для осуществления перехода из активного состояния в неактивное состояние без выполнения требуемого переключения, когда определено, что было демодулировано сообщение о пейджинговом тайм-слоте, связанное с данным пейджинговым сигналом.
| US 5987012 А, 16.11.1999 | |||
| КОНЦЕНТРИРОВАННАЯ АБОНЕНТСКАЯ СИСТЕМА ДЛЯ МЕСТНОЙ СЕТИ РАДИОСВЯЗИ | 1996 |
|
RU2158489C2 |
| WO 00/21314 A1, 13.04.2000 | |||
| WO 00/27158 A1, 05.11.2000 | |||
| Шнековый валец очистителя корне-плОдОВ | 1975 |
|
SU808034A1 |

