Эта заявка имеет приоритет в соответствии с предварительной заявкой США № 60/176478, зарегистрированной 17 января 2000.
Это изобретение относится к системе радиосвязи. Более конкретно, настоящее изобретение относится к системам и способам демодуляции быстрого канала поискового вызова, используемого для облегчения автономной обработки в системе радиосвязи.
Системы радиосвязи используются для многих требующихся применений, от поиска и сохранения информации до применения в Интернете. Такое применение требует надежных, рентабельных и небольших по размеру систем связи и сопутствующих беспроводных телефонов.
Сотовые системы связи, такие как системы связи множественного доступа с кодовым разделением (МДКР, CDMA), часто отличаются множеством подвижных станций (например, телефоны для сотовой связи, мобильные устройства, радиотелефоны или мобильные телефоны) во взаимодействии с одной или большим количеством подсистем приемопередатчиков базовой станции (ППБС, BTS). Сигналы, передаваемые подвижными станциями, принимаются ППБС и часто передаются к центру коммутации подвижной связи (ЦКПС, MSC), имеющему контроллер базовых станций (КБС, BSC). ЦКПС затем направляет сигнал к коммутируемой телефонной сети общего пользования (КТСОП, PSTN) или на другой беспроводной телефон. Точно так же сигнал может быть передан с КТСОП на беспроводной телефон через базовую станцию или ППБС и ЦКПС.
Сети радиосвязи часто используют различные каналы, такие как каналы поискового вызова (пейджинговые каналы) и каналы трафика, для облегчения связи между беспроводным телефоном и ППБС, как раскрыто в промежуточном стандарте IS-95 телефонов для сотовой связи. Сообщения поискового вызова передаются ППБС по каналу поискового вызова на присоединенный беспроводной телефон, чтобы указать на входящий вызов. Когда беспроводной телефон обнаруживает сообщение поискового вызова, последовательность служебных сообщений согласования впоследствии передается между беспроводным телефоном и совместно действующей ППБС для того, чтобы установить канал трафика. Канал трафика типично поддерживает трафик данных и голосовой график.
Обычно беспроводные телефоны постоянно отслеживают канал поискового вызова на предмет наличия пейджинговых последовательностей, свидетельствующих о входящих вызовах. Приемник беспроводных телефонов остается включенным, пока схема обработки сигналов в беспроводном телефоне демодулирует канал поискового вызова для определения, была ли послана пейджинговая последовательность. К сожалению, приемник тратит избыточную энергию, что значительно ограничивает срок службы телефонной батареи.
Системы для уменьшения потребления энергии в беспроводных телефонах часто используются в беспроводных телефонах и/или в сопровождающей их сети для того, чтобы продлить срок службы телефонной батареи и связанную с ним продолжительность работы в режиме дежурного приема. Чтобы увеличить продолжительность работы в режиме дежурного приема, некоторые более новые беспроводные телефоны работают в интервальном режиме. В интервальном режиме приемник беспроводного телефона периодически активизируется в соответствии с предопределенными канальными интервалами поискового вызова, установленными в соответствии со стандартом IS-95 передачи данных. Действующая совместно с ним ППБС передает пейджинговые последовательности в течение канальных интервалов поискового вызова. Продолжительность работы беспроводного телефона в режиме дежурного приема увеличивается с помощью периодического включения телефонного приемника и демодуляции канала поискового вызова вместо постоянной демодуляции основного канала поискового вызова, как делалось раньше.
К сожалению, сообщения канала поискового вызова часто длинны и требуют расширенной обработки, что увеличивает потребляемую телефоном энергию и понижает срок службы батареи и связанную с ним продолжительность работы в режиме дежурного приема. Кроме того, такие разработанные системы и действующие совместно с ними каналы поискового вызова требуют избыточной обработки длинных сообщений канала поискового вызова для обнаружения входящих вызовов. Это дополнительно сокращает срок службы телефонной батареи.
Дополнительное увеличение продолжительности работы телефона в режиме дежурного приема достигается с помощью относительно нового добавления к стандарту IS-95 передачи данных, известного как автономная обработка. В сети радиосвязи, использующей автономную обработку, на беспроводной телефон периодически передается пара символов быстрого канала поискового вызова (БКПВ, QPCH). Символы быстрого канала поискового вызова, то есть быстрые пейджинговые последовательности, указывают на присутствие или отсутствие входящего вызова, который будет установлен на ожидаемом канале трафика (F-CCCH). Символы БКПВ прибывают парами со скоростью 9600 битов в секунду (бит/сек) или 4800 бит/сек. Временные интервалы, в которых символы БКПВ передаются от действующей совместно ППБС, известны беспроводному телефону, который периодически включает приемник в соответствующих временных интервалах.
В беспроводном телефоне, использующем автономную обработку, приемник беспроводного телефона включается, производит выборку из БКПВ, затем приемник немедленно выключается и выборки из БКПВ обрабатываются автономно (когда приемник выключен). Последующий анализ выборки или выборок из БКПВ указывает, должен ли беспроводной телефон включить питание приемника и демодулировать канал поискового вызова для того, чтобы принять входящую пейджинговую последовательность, связанную с входящим вызовом. Использование БКПВ помогает минимизировать время включенного состояния приемника и сократить случаи полной демодуляции канала поискового вызова, давая возможность снижения потребления энергии беспроводным телефоном и увеличения в связи с этим срока службы телефонной батареи. К сожалению, существующие системы и способы обнаружения пилот-сигналов и связанных с ними компонентов многолучевого сигнала, требуемых для демодуляции БКПВ, часто оказываются нежелательно большими, дорогими, потребляют избыточную энергию и неэффективны.
Следовательно, в технике связи существует потребность в эффективной системе и способе поиска и обнаружения пилот-сигналов и связанных с ними компонентов многолучевого распространения, требуемых для демодуляции БКПВ. Существует дополнительная потребность в способе для выбора соответствующих параметров поискового устройства для уменьшения требуемого оборудования. Существует дополнительная потребность в экономичной системе, которая может эффективно демодулировать канал БКПВ при минимальном потреблении энергии.
На удовлетворение данной потребности в технике направлена система для облегчения обнаружения и успешного декодирования быстрого канала поискового вызова (БКПВ) настоящего изобретения. В показанном варианте осуществления система адаптирована к использованию с системой радиосвязи, которая поддерживает основной канал поискового вызова и быстрый канал поискового вызова. Система включает в себя первое средство для обнаружения пилот-сигнала, связанного с быстрым каналом поискового вызова, на основании принятого сигнала. Первое средство включает в себя когерентный интегратор первой размерности и некогерентный интегратор второй размерности. Второе средство определяет рабочие характеристики приемника системы на основании пилот-сигнала. Третье средство оптимизирует первую размерность и вторую размерность на основании рабочих характеристик.
В конкретном варианте осуществления первое средство включает в себя радиоприемный тракт (МДКР, CDMA) для приема принятого сигнала и затем обеспечения передачи принятого цифрового сигнала к оперативному запоминающему устройству (ОЗУ) выборок. Оперативное запоминающее устройство выборок включает в себя средство для осуществления выборки принятого цифрового сигнала в предопределенных временных интервалах и затем обеспечения передачи выборок принятого сигнала. Интерполятор настраивает частоту выборок принятого сигнала и затем обеспечивает передачу сигнала с настроенной частотой выборок. Первое средство включает в себя поисковое устройство, которое включает в себя первый когерентный интегратор, второй когерентный интегратор и некогерентный интегратор. Поисковое устройство дополнительно включает в себя комплекс сжатия/корреляции для корреляции принятого сигнала с настроенной частотой выборок с псевдошумовым кодом-кандидатом и затем обеспечения передачи результата корреляции. Первый интегратор и второй интегратор интегрируют результат корреляции по предопределенному числу элементарных сигналов, соответствующих первой размерности, и обеспечивают передачу первого и второго интегрированных значений соответственно. Поисковое устройство дополнительно включает в себя средство для возведения в квадрат первого и второго интегрированных значений и обеспечения передачи первого и второго квадратичных значений соответственно. Поисковое устройство дополнительно включает в себя средство для сложения первого и второго квадратичных значений и обеспечения передачи суммы. Некогерентный интегратор интегрирует сумму по предопределенному числу значений и выводит оценку или оценки пилот-сигнала. Предопределенное число соответствует второй размерности.
В еще одном конкретном варианте осуществления первое средство дополнительно включает в себя средство для вычисления энергии пилот-сигнала, связанной с пилот-сигналом, из оценки (оценок) пилот-сигнала. Второе средство включает в себя средство для определения рабочих характеристик приемника, основанных на оценке (оценках) пилот-сигнала и энергии пилот-сигнала и демодулированном канале БКПВ. Третье средство включает в себя средство для вычисления, на основании рабочих характеристик приемника, оптимальных значений для первой размерности и второй размерности и выборочной корректировки первой размерности и второй размерности. Первая размерность - 512 и вторая размерность меньше или равна 4.
В настоящем изобретении второе средство обеспечивает передачу рабочих характеристик приемника на основании пилот-сигнала и канала БКПВ. Рабочие характеристики приемника затем используются третьим средством для оптимизации параметров размерности интегрирования поискового устройства, что приводит к существенному снижению необходимого размера оперативного запоминающего устройства выборок.
Фиг.1 - схема типичной системы радиосвязи, созданной в соответствии с настоящим изобретением.
Фиг.2 - более подробная схема подвижной станции фиг.1, показывающая поисковое устройство БКПВ в соответствии с настоящим изобретением.
Фиг.3 - более подробная схема поискового устройства, показанного на фиг.2.
Фиг.4 - последовательность операций способа, используемого подвижной станцией, показанной на фиг.2, для выборочного обновления параметров поискового устройства.
Фиг.5 - типичный график рабочих характеристик приемника, использующего способ в соответствии с фиг.4.
Хотя настоящее изобретение описано со ссылкой на показанные варианты осуществления для конкретных применений, должно быть понятно, что данное изобретение не ограничено ими. Специалистом могут быть внесены дополнительные изменения, не выходя за рамки данного изобретения, которое также может быть использовано и в других областях техники.
Фиг.1 - структурная схема типичной системы 10 радиосвязи, в которой может быть использовано настоящее изобретение. Система 10 включает в себя центр 12 коммутации подвижной связи (ЦКПС), имеющий контроллер 14 базовых станций (КБС). Коммутируемая телефонная сеть 16 общего пользования (КТСОП) направляет вызовы от телефонных линий и других сетей и устройств связи (не показаны) к и от ЦКПС 12. ЦКПС 12 направляет вызовы от КТСОП 16 к и от первой ППБС 18 и второй ППБС 20, которые связаны с первой ячейкой 22 и второй ячейкой 24 соответственно. ППБС 18 и 20 часто называются контроллерами ячейки.
ЦКПС 12 направляет вызовы между ППБС 18 и 20. Первая ППБС 18 направляет вызовы к первой подвижной станции 26 в пределах первой ячейки 22 через первый канал 28 связи. Канал 28 связи является двусторонним каналом связи, имеющим прямой канал 30 связи и обратный канал 32 связи. Как правило, когда ППБС 18 установила звуковую связь с подвижной станцией 26, канал 28 связи характеризуется как канал трафика. Хотя только две ППБС 18 и 20 показаны на фиг1, большее количество ППБС или меньшее количество ППБС могут использоваться без отхода от сущности настоящего изобретения.
Когда подвижная станция 26 передвигается от первой ячейки 22 ко второй ячейке 24, осуществляется передача обслуживания подвижной станции 26 ко второй ППБС 20. Передача обслуживания типично происходит в области 36 перекрытия, где первая ячейка 22 перекрывается второй ячейкой 24. При мягкой передаче обслуживания подвижная станция 26 устанавливает второй канал 34 связи с назначенной ППБС 20 в дополнение к первому каналу 28 связи с первой ППБС 18. Во время мягкой передачи обслуживания оба и первый канал 28 связи, и второй канал 34 связи поддерживаются одновременно. После того, как подвижная станция 26 перешла во вторую ячейку 24, она может удалить первый канал 28 связи. При жесткой передаче обслуживания канал 34 связи не устанавливается. Когда подвижная станция 26 передвигается от первой ячейки 22 к второй ячейке 24, канал 28 связи с исходной ППБС 18 удаляется, и новый канал связи сформируется с заданной ППБС 20.
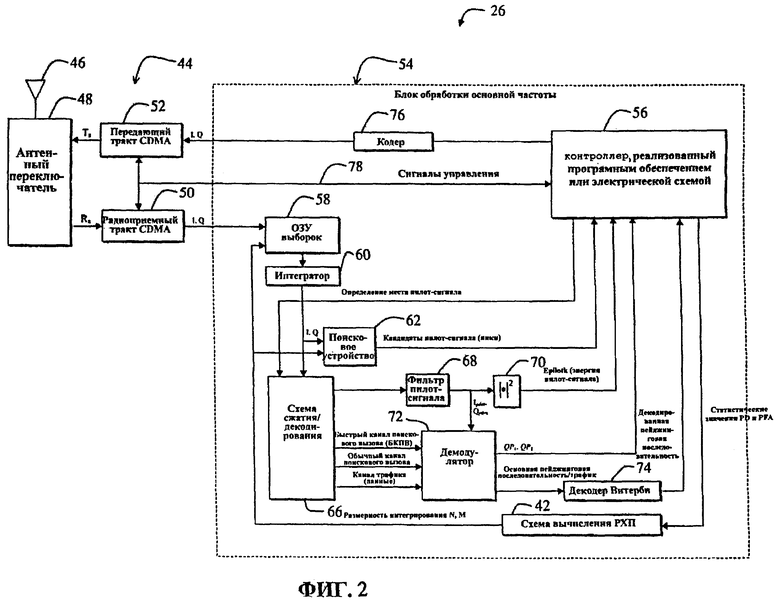
Фиг.2 - более подробная схема беспроводного телефона 26, т.е. подвижной станции, показанной на фиг.1, показывающая схему 42 вычисления рабочих характеристик приемника (РХП, ROC), оперативное запоминающее устройство 58 выборок и уникальное поисковое устройство 62, созданное в соответствии с настоящим изобретением. Для ясности, различные компоненты удалены с фиг.2, такие как преобразователи сигналов промежуточной частоты (ПЧ) в полосу частот исходного сигнала, смесители, преобразователи с понижением частоты, генераторы, таймеры, источники питания и усилители, однако специалистам известно, где и как осуществить дополнительные необходимые компоненты.
Подвижная станция 26 включает в себя приемопередатчик 44, имеющий антенну 46, которая связана с антенным переключателем 48. Антенный переключатель 48 связан со входом радиоприемного тракта 50 МДКР и с выходом передающего тракта 52 МДКР. Блок 54 обработки основной полосы частот связан с приемопередатчиком 44 МДКР и включает в себя контроллер 56, оперативное запоминающее устройство (ОЗУ) 58 выборок, интерполятор 60, поисковое устройство 62, блок 64 оценки принятой энергии, схему 66 сжатия/декодирования, блок 68 оценки пилот-сигнала (фильтр), схему 70 вычисления энергии пилот-сигнала, демодулятор 72, схему 42 вычисления РХП, декодер 74 и кодер 76.
Контроллер 56 связан с шиной 78, которая обеспечивает передачу входного сигнала управления к передающему тракту 52 МДКР (передатчику) и радиоприемному тракту 50 МДКР (приемнику). Выходом радиоприемного тракта 50 МДКР является принятый цифровой сигнал, который является входным для ОЗУ 58 выборок из блока 54 обработки основной полосы частот. Выход ОЗУ 58 выборок является входом в интерполятор 60. Выход интерполятора 60 связан со входами поискового устройства 62 и схемы 66 сжатия/декодирования. Выход поискового устройства 62 представляет пики-кандидаты пилот-сигнала, один пик для каждого из k компонентов многолучевого пилот-сигнала. Пики-кандидаты передаются на вход контроллера 56.
Выход блока 68 оценки пилот-сигнала представляет фильтрованную оценку пилот-сигнала, имеющую синфазную (Ipilot) и квадратурную (Qpilot) компоненты сигнала, которая передается на вход схемы 70 вычисления энергии пилот-сигнала и демодулятор 72. Выход схемы 70 вычисления энергии пилот-сигнала связан со входом контроллера 56.
Выходы пилотного канала, основного канала поискового вызова, канала трафика и канала БКПВ схемы 66 сжатия/декодирования передаются на вход демодулятора 72. Скалярное произведение и/или векторное произведение БКПВ, которое выводится из демодулятора 72, представляет демодулированный БКПВ и вводится на контроллер 56, который включает в себя электрическую схему или программное обеспечение для объединения и обнаружения БКПВ (не показаны), предназначенные для анализа демодулированного БКПВ для определения, является ли пейджинговая последовательность, появляющаяся на основном канале поискового вызова, полной пейджинговой последовательностью. Выводы канала трафика и основного поискового канала связи передаются на вход декодера 74 Витерби после дополнительной обработки через такие подсистемы (не показаны), как схемы сжатия и схемы обратного перемежения (см. спецификацию IS-95). Выход декодера 74 связан со входом контроллера 56. Выход контроллера 56 связан со входом схемы 42 вычисления РХП, выход которого связан со входом ОЗУ 58 выборок и входом поискового устройства 62.
При работе сигналы МДКР, принятые через антенну 46, направляются к радиоприемному тракту 50 МДКР через антенный переключатель 48. Радиоприемный тракт 50 МДКР включает в себя схему преобразования радиочастоты в промежуточную частоту (не показана) для смешивания принятых сигналов радиочастоты (Rx) с сигналами промежуточной частоты. Дополнительная схема преобразования частоты (не показана) смешивает сигналы промежуточной частоты с аналоговыми сигналами основной полосы частот, которые затем преобразовываются в цифровые сигналы основной полосы частот с помощью аналого-цифрового преобразователя (не показан). Цифровые сигналы основной полосы частот включают в себя компоненты: синфазные (I), квадратурные (Q) и шумового сигнала.
Точно так же передающий тракт 52 МДКР включает в себя схему преобразования частоты (не показана) для преобразования цифровых входных сигналов (имеющие I и Q компоненты сигнала), выходящих от кодера 76, в аналоговые сигналы радиочастоты при подготовке к передаче через антенну 46.
ОЗУ 58 выборок в блоке 54 обработки основной полосы частот осуществляет выборку цифровых сигналов основной частоты, принятых от радиоприемного тракта 50 МДКР в предопределенные временные канальные интервалы. ОЗУ 58 выборок содержит выборки в буфере (не показан) для использования автономной схемой обработки, как обсуждено более подробно ниже. Предопределенные временные канальные интервалы, в которых ОЗУ 58 выборок осуществляет выборки из принятого сигнала, определены в соответствии со стандартом IS-95 передачи данных. ОЗУ 58 выборок может выборочно не использоваться, когда подвижная станция 26 не работает в интервальном режиме, без отхода от сущности настоящего изобретения.
Размерность выборок сигнала, которая используется для ОЗУ 58 выборок, прямо связана с размером ОЗУ 58 выборок. ОЗУ 58 выборок осуществляет выборку из сигнала среды, т.е. принятого сигнала, чтобы собрать достаточную информацию из принятого сигнала БКПВ для облегчения автономной обработки. Как обсуждено более подробно ниже, уникальная разработка настоящего изобретения помогает минимизировать требуемый размер ОЗУ 58 выборок.
Выход ОЗУ 58 выборок является входом интерполятора 60. Интерполятор 60 преобразует с повышением частоты цифровой сигнал, выходящий из ОЗУ 58 выборок, к более высокой цифровой частоте. В настоящем конкретном варианте осуществления частота выходного цифрового сигнала из ОЗУ 58 выборок эквивалентна частоте принятого цифрового сигнала, которая является двойной частотой следования элементарных посылок. Интерполятор 60 преобразовывает частоту выходного сигнала от ОЗУ 58 выборок к частоте, равной восемь умножить на частоту следования элементарных посылок (CHIP×8). Специалисту должно быть понятно, что точные частоты цифровых сигналов, используемых подвижной станцией 26, зависят от применения и могут быть определены в соответствии с потребностями заданного применения.
Когда ОЗУ 58 выборок осуществило выборку из принятого сигнала, интерполятор 60 обеспечивает передачу преобразованного с повышением частоты цифрового сигнала, имеющего синфазные и квадратурные компоненты сигнала, к поисковому устройству 62 и схеме 66 сжатия/декодирования. Поисковое устройство 62 анализирует принятый цифровой сигнал и выводит на контроллер 56 пики-кандидаты пилот-сигнала для k компонентов многолучевого сигнала, k - переменная, представляющая число обнаруженных многолучевых компонентов принятого сигнала.
Поисковое устройство 62 включает в себя когерентный интегратор I-канала, когерентный интегратор Q-канала и некогерентный интегратор, имеющий новую размерность интегрирования, которая минимизирует заданный размер ОЗУ 58 выборок при поддержании достаточной точности обнаружения пилот-сигнала, как обсуждено более подробно ниже. Блок 68 оценки пилот-сигнала осуществлен как фильтр конечной импульсной характеристики (КИХ, FIR) или фильтр бесконечной импульсной характеристики (БИХ, IIR), который отфильтровывает шум от декодированного пилот-сигнала с шумом (имеющий k компонентов многолучевого сигнала), выходящего от схемы 66 сжатия/декодирования. Выход фильтра 68 пилот-сигнала – оценка пилот-сигнала (Pk), которая включает в себя синфазный (Ipilotk) и квадратурный (Qpilotk) компоненты сигнала, связанные с k-тым компонентом многолучевого пилот-сигнала.  описывается следующим образом:
описывается следующим образом:

Дополнительный нижний индекс, такой как 1 или 2, добавляется для определения того, что данный компонент сигнала соответствует, соответственно, первому символу или второму символу канального интервала принятого БКПВ сигнала. Например,  относится к k-й оценке многолучевого пилот-сигнала, связанной с первым символом БКПВ. Пилот-сигнал связывается или соответствует символу БКПВ, когда пилот-сигнал принимается одновременно с символом БКПВ и передается в той же самой выборке сигнала ОЗУ 58 выборок. Пилот-сигнал является специализированным маяком для любого когерентно обнаруженного сигнала МДКР. В применении к БКПВ, для обнаружения БКПВ предпочтительно используются скалярное и/или векторное произведение между пилот-сигналом и БКПВ.
относится к k-й оценке многолучевого пилот-сигнала, связанной с первым символом БКПВ. Пилот-сигнал связывается или соответствует символу БКПВ, когда пилот-сигнал принимается одновременно с символом БКПВ и передается в той же самой выборке сигнала ОЗУ 58 выборок. Пилот-сигнал является специализированным маяком для любого когерентно обнаруженного сигнала МДКР. В применении к БКПВ, для обнаружения БКПВ предпочтительно используются скалярное и/или векторное произведение между пилот-сигналом и БКПВ.
Оценка пилот-сигнала Р передается к демодулятору 72 и к схеме 70 вычисления энергии пилот-сигнала. Схема 70 вычисления энергии пилот-сигнала возводит в квадрат оценку Р пилот-сигнала и передает оценку энергии (Epilotlk) пилот-сигнала к демодулятору 72 и контроллеру 56. Контроллер 56 включает в себя интегратор (не показан), который суммирует суммы k-й энергии пилот-сигнала, связанные с первым символом БКПВ, и k-й энергии пилот-сигнала, связанные с вторым символом БКПВ, для того, чтобы выдать суммированные энергии пилот-сигнала Epilot1 и Epilot2, соответственно, как описано следующими уравнениями:


где Epilotlk - энергия пилот-сигнала, связанная с k-м компонентом многолучевого сигнала первого символа БКПВ канального интервала БКПВ, и Epilot2k - энергия пилот-сигнала, связанная с k-м компонентом многолучевого сигнала второго символа БКПВ канального интервала БКПВ.
Контроллер 56 включает в себя программное обеспечение или электрическую схему для определения статистических значений вероятности ложной тревоги (РFA) и вероятности обнаружения (РD), на основании выходного сигнала демодулированного канала БКПВ от демодулятора 72. Передавая известные сигналы к антенне 46 в предопределенное время, вероятность ложного обнаружения сокращенной пейджинговой последовательности (РFA) и вероятности точного обнаружения сокращенной пейджинговой последовательности (РD) может быть легко определена с помощью контроллера 56. Другие методы для определения PFA и pD могут использоваться без отхода от сущности настоящего изобретения.
Статистические значения РFA и PD передаются от контроллера 56 к схеме 42 вычисления РХП. Схема 42 вычисления РХП использует статистические значения РХП РFA и РD для определения оптимальной размерности интегрирования (М и N) для интеграторов поискового устройства и оптимального размера ОЗУ 58 выборок с помощью уникальных методов настоящего изобретения, как обсуждено более подробно ниже. Схема 42 вычисления РХП вычисляет рабочие характеристики приемника из данных РFA и pD, выходящих от контроллера 56. Рабочие характеристики приемника определяют, как вероятность неправильной демодуляции пейджинговой последовательности БКПВ (РFA) изменяется с вероятностью обнаружения пейджинговой последовательности (РD).
Схема 42 вычисления РХП корректирует N и М, пока оптимальные значения не будут достигнуты. Оптимальные значения N и М минимизируют требуемый размер ОЗУ 58 выборок при поддержании вероятности ложной тревоги и вероятности обнаружения БКПВ в приемлемых пределах. Приемлемые пределы типично определяются с помощью технических требований клиента. Например, клиент может определить, что вероятность успешного завершения запроса должна быть 98 процентов. Следовательно, вероятность успешного обнаружения (РD) пейджинговой последовательности БКПВ, умноженная на вероятность успешного обнаружения и демодуляции ожидающейся основной пейджинговой последовательности в соответствии с обработкой пейджинговой последовательности БКПВ и успешного установления связанного канала трафика в соответствии с этим, должна быть ниже 98 процентов. Приемлемая вероятность ложной тревоги устанавливается в соответствии с ее влиянием на срок службы телефонной батареи. Точное значение для приемлемой вероятности ложной тревоги зависит от применения.
Значения N и М воздействуют на необходимый размер ОЗУ 58 выборок. Меньшие значения N и М приводят к меньшему размеру ОЗУ 58 выборок. Если никакие другие ограничения размера не наложены на размер ОЗУ 58 выборок другой схемой, то размер ОЗУ 58 выборок будет М×N. В настоящем конкретном варианте осуществления N и М - 512 и 2 или 4 соответственно, которые соответствуют размерам ОЗУ выборок 512×2 или 512×4 соответственно. Специалист оценит, что точный размер ОЗУ 58 выборок зависит от исполнения и может отличаться от 2×128 без отхода от сущности настоящего изобретения.
После того, как N и М определены и минимизированы для конкретного применения с помощью настоящего изобретения, схема 42 вычисления РХП может быть удалена. Альтернативно, схема 42 вычисления РХП может использоваться для динамического установления размера ОЗУ 58 выборок и размерности интегрирования поискового устройства 62.
Специалист оценит, что схема 42 вычисления РХП может быть удалена, и вместо этого могут использоваться соответствующие размерности интегрирования для интеграторов поискового устройства 62, определенные вручную (экспериментально в лаборатории) в соответствии с методами настоящего изобретения без отхода от сущности настоящего изобретения.
В существующем конкретном варианте осуществления полная энергия сигнала, принятого радиоприемным трактом 50 МДКР, масштабируется к предопределенному значению через схему автоматической регулировки усиления (АРУ) (не показана) в радиоприемном тракте 50 МДКР. Такая схема АРУ известна в технике. Предопределенное значение - оценка полной энергии (Iо) принятого сигнала, и она известна в контроллере 56.
Дополнительные подробности о быстрых каналах поискового вызова, используемых для целей автономной обработки, раскрыты в патентной заявке № 08/865650, зарегистрированной 30 мая 1997, Butler и др., озаглавленной DUAL CHANNEL SLOTTED PAGING, принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки. Дополнительно подробности БКПВ раскрыты в патентной заявке США № 09/252846, зарегистрированной 19 февраля 1999, Agrawal и др., озаглавленной METHOD AND APPARATUS FOR MAXIMIZING STANDBY TIME USING A QUICK PAGING CHANNEL, принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Схема 66 сжатия/декодирования включает в себя блок псевдошумового сжатия (не показан) и схему М-арного декодирования Уолша (не показана) для декодирования пилотного канала, канала данных, основного канала поискового вызова и БКПВ из принятого сигнала, выходящего из интерполятора 60, если они существуют в принятом сигнале. М равно 64 в существующем конкретном варианте осуществления. Декодированные каналы передаются к демодулятору 72.
Демодулятор 72 вычисляет скалярное произведение и/или векторное произведение между сигналом БКПВ, принятым от схемы 66 сжатия/декодирования, и оценкой пилот-сигнала Р, выходящей из блока 68 оценки пилот-сигнала. В существующем конкретном варианте осуществления сигнал БКПВ включает в себя канальный интервал, имеющий первый символ и второй символ, определенные в соответствии с стандартом IS-95 передачи данных.
Скалярное произведение (dot1) первого символа БКПВ (QPCH1) с соответствующей оценкой пилот-сигнала P1 определяется в соответствии со следующим уравнением:

где k - число доступных компонентов многолучевого распространения принятого сигнала; Ipilotlk - синфазная составляющая оценки пилот-сигнала, связанная с k-тым компонентом многолучевого распространения первого символа БКПВ канального интервала; IQPCHlk- синфазный компонент k-го компонента многолучевого распространения первого символа БКПВ; Qpilotlk - квадратурная составляющая k-го компонента многолучевой оценки пилот-канала, связанного с первым символом QPCH; QQPCHlk - квадратурная составляющая k-го компонента многолучевого распространения первого символа БКПВ сигнала БКПВ.
Точно так же скалярное произведение (dot2) второго символа БКПВ (QPCH2) с соответствующей оценкой пилот-сигнала P2 определяется в соответствии со следующим уравнением:

где отдельные символы подобны символам, определенным выше для уравнения (4), но связаны с вторым символом канального интервала БКПВ, а не с первым символом канального интервала БКПВ.
Дополнительные подробности о быстрых каналах поискового вызова, используемых для автономной обработки, раскрыты в патентной заявке США № 08/865650, зарегистрированной 30 мая 1997 Butler и др., озаглавленной DUAL CHANNEL SLOTTED PAGING (номер в реестре D714PSA 7Е30), принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки. Дополнительно БКПВ подробно раскрыт в поданной патентной заявке США № 09/252846, зарегистрированной 19 февраля 1999, Agrawal и др., озаглавленной A METHOD AND APPARATUS FOR MAXIMIZING STANDBY TIME USING A QUICK PAGING CHANNEL, принадлежащей правопреемнику настоящего изобретения и приведенной здесь качестве ссылки.
Демодулятор 72 вычисляет первое скалярное произведение (dot1), связанное с первым символом БКПВ, второе скалярное произведение (dot2), связанное с вторым символом БКПВ, и/или векторные произведения cross1 и cross2, связанные с первым и вторым символами БКПВ соответственно, и обеспечивает передачу результатов на контроллер 56. Векторные произведения crossl и cross2 определяются в соответствии со следующими уравнениями:


где отдельные символы означают то же самое, как определено выше для уравнений (4) и (5).
Вычисляет ли демодулятор 72 скалярные произведения, векторные произведения или суммы скалярных и векторных произведений - зависит от применения и от режима системы 26. Например, в системах с 1 мультинесущей (1×MH, 1×MC) без ортогонального разнесения при передаче (ОРП, OTD) (1×MH без ОРП) демодулятор 72 вычисляет скалярные и векторные произведения в соответствии с уравнениями (4)-(7) и выводит dot1+cross1 и dot2+cross2 на контроллер 56. В системах с 3 мультинесущими (3×МН, 3×МС) и в 1xMH системах с ОРП демодулятор 72 выводит скалярные произведения, векторные произведения или суммы скалярных и векторных произведений в зависимости от потребностей данного применения. Обращаясь к существующему описанию, соответствующий вывод демодулятора может быть определен специалистом для удовлетворения потребности заданного применения.
Выход демодулятора 72, который является входом для контроллера 56, обозначен QP1 для выходов, связанных с первым символом канального интервала БКПВ, и QP2 для выходов, связанных с вторым символом канального интервала БКПВ. Различные выходы демодулятора 72 для различных системных режимов суммированы в следующей таблице:
QP2=dot2, cross2, или dot2+cross2
Альтернативно, другая комбинационная функция оценки пилот-сигнала и первого и второго символов БКПВ может передаваться на объединитель 40 БКПВ в дополнение или вместо скалярных и/или векторных произведений, без отхода от формы настоящего изобретения.
Демодулятор 72 может также обеспечивать передачу сигнала данных/трафика, если доступно, к декодеру 74 Витерби, когда подвижная станция 26 обрабатывает запрос или другой вид канала связи. Декодер 74 может затем декодировать сигнал данных/трафика, который может представлять голос или другой тип данных, и направлять декодированный сигнал на контроллер 56. Контроллер 56 использует различное оборудование и/или программные модули (не показаны) для направления декодированных сигналов на микрофон или на другую функцию программного обеспечения или оборудования (не показаны).
Контроллер 56 включает в себя функциональные возможности для воплощения объединителя БКПВ (не показан), который использует значения сокращенной пейджинговой последовательности (QP) QP1 и QP2, оценки энергии пилот-сигнала Epilot1 и Epilot2 и оценки энергии принятого сигнала Io1 и Iо2, связанные с первым и вторым символами БКПВ, соответственно для вычисления первого решающего параметра (CSI) и второго решающего параметра (D). Второй решающий параметр D также называется символом демодуляции. Первый решающий параметр CSI - отношение несущего сигнала к интерференции и описывается следующим уравнением:

где CSI эквивалентен энергии (Epilot/Io) combined, которая является объединенным отношением пилот-сигнала к интерференции для первого и второго символов БКПВ; Epilot1 - энергия части пилот-сигнала, принятой одновременно с первым символом БКПВ; Epilot2 - энергия части пилот-сигнала, принятой одновременно с вторым символом БКПВ; Io1 - полная энергия части принятого сигнала, которая включает в себя шум и интерференцию, принятой одновременно с первым символом БКПВ; и Io2 - полная энергия части принятого сигнала, которая включает в себя шум и интерференцию, принятой одновременно с вторым символом БКПВ. В настоящем конкретном варианте осуществления Io1 и Iо2 предопределены через схему АРН (автоматической регуляции несущей), и усилители системы регулировки усиления (УСРУ) (не показаны) в радиоприемном тракте 50 МДКР, однако Io1 и Iо2 могут оцениваться через оценки энергии или определяться через другие механизмы без отхода от формы настоящего изобретения.
Второй решающий параметр D - новый решающий параметр, который описывается следующим уравнением:
где QP1 является или dot1, cross1, или dot1+cross1, как обозначено в таблице; QP2 является или dot2, cross2, или dot2+cross2, как обозначено в таблице; и Epilot1 и Epilot2 - как описано выше.
Контроллер 56 объединяет параметры CSI и D по всем доступным компонентам многолучевого распространения. Результаты (CSI и D) могут быть сохранены в памяти (не показана) и к ним можно выборочно обращаться для определения, должна ли подвижная станция 26 впоследствии включить приемник 50 МДКР для приема и обработки ожидающейся полной пейджинговой последовательности, посланной через основной канал поискового вызова.
Альтернативно, функциональная возможность объединителя/детектора БКПВ контроллера 56 может быть осуществлена в соответствии с тем, как это раскрыто в патентной заявке США № 09/695808, зарегистрированной 24 октября 2000 изобретателем настоящего изобретения, озаглавленной WIRELESS COMMUNICATIONS RECEIVER EMPLOYING QUICK PAGING CHANNEL SYMBOLS AND NOISE POWER ESTIMATES TO FACILITATE DETECTION OF A PRIMARY PAGING CHANNEL, принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Функциональная возможность обнаружения пейджинговой последовательности БКПВ (не показана) в контроллере 56 первоначально сравнивает параметр CSI с пороговым значением перебоя Terasure. Если CSI>Terasure, то объявляется перебой.
Пороговое значение перебоя Terasure установлено таким образом, чтобы, когда объявлен перебой, это значит, что среда сигнала, сквозь которую распространяются принятые сигналы, разрушена шумом или другой интерференцией, и БКПВ не может точно указывать на присутствие или отсутствие ожидающегося сообщения пейджинговой последовательности на основном канале поискового вызова. Следовательно, ожидающийся основной канал поискового вызова обрабатывается, чтобы предотвратить ненужный пропуск запросов.
Альтернативно, функциональная возможность объединителя/детектора БКПВ контроллера 56 может быть осуществлена в соответствии с тем, как это раскрыто в патентной заявке США № 09/955521, зарегистрированной 12 сентября 2001 изобретателем настоящего изобретения, озаглавленной WIRELESS COMMUNICATIONS RECEIVER EMPLOYING QUICK PAGING CHANNEL SYMBOLS AND CHANNEL QUALITY PARAMETERS TO FACILITATE DETECTION OF A PRIMARY CHANNEL, принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Когда CSI<Terasure, приемник 50 МДКР активизируется в соответствии со стандартом IS-95 для того, чтобы принимать и демодулировать ожидающееся сообщение основного канала поискового вызова. Контроллер 56 затем активизирует приемник 50 МДКР и устанавливает ОЗУ 58 выборок в режим обхода через управляющие сигналы, доставляемые через шину 78 во время, соответствующее канальному интервалу, в течение которого основной канал поискового вызова должен быть принят. Декодер 74 Витерби автоматически включается через информацию сигнализации, закодированную в каждом пакете, и декодирует основной канал поискового вызова или вход канала трафика от демодулятора 72. Декодированный основной канал поискового вызова или канал трафика передается на контроллер 56.
Альтернативно, функциональная возможность объединителя/детектора БКПВ контроллера 56 может быть осуществлена в соответствии с тем, как это раскрыто в патентной заявке США № 09/952722, зарегистрированной 13 сентября 2001 изобретателем настоящего изобретения, озаглавленной QUICK PAGING CHANNEL RECEIVER FOR A WIRELESS COMMUNICATIONS SYSTEM, принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Когда подвижная станция 26 принимает полную пейджинговую последовательность, т.е. основную пейджинговую последовательность, через основной канал поискового вызова, пейджинговая последовательность сжимается с помощью схемы 66 сжатия/декодирования, объединяется по компонентам многолучевого распространения с помощью демодулятора 72 и передается к декодеру 74, где пейджинговая последовательность декодируется и составляющая информация пейджинговой последовательности отправляется контроллеру 56. Программное обеспечение и/или схемы аппаратных средств, известные из техники (не показаны), в контроллере 56 интерпретируют пейджинговую последовательность. Если полная пейджинговая последовательность указывает на ожидающийся канал трафика, то контроллер 56 выдает соответствующие управляющие команды к различным блокам в подвижной станции 26 для того, чтобы подготовить подвижную станцию 26 для обработки ожидающегося канала трафика.
Альтернативно, функциональная возможность объединителя/детектора БКПВ контроллера 56 может быть осуществлена в соответствии с тем, как это раскрыто в патентной заявке США № 09/761219, зарегистрированной 18 января 2001 изобретателем настоящего изобретения, озаглавленной DUAL PAGING CHANNEL RECEIVER FOR A WIRELESS COMMUNICATIONS SYSTEM, принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Альтернативно, функциональная возможность объединителя/детектора БКПВ контроллера 56 может быть осуществлена в соответствии с тем, как это раскрыто в патентной заявке США № 09/761342, зарегистрированной 16 января 2001 изобретателем настоящего изобретения, озаглавленной WIRELESS COMMUNICATIONS RECEIVER EMPLOYING A UNIQUE COMBINATION OF QUICK PAGING CHANNEL SYMBOLS TO FACILITATE DETECTION OF A PRIMARY PAGING CHANNEL, принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Если CSI>Terasure, то решающий параметр (символ демодуляции) D сравнивается с пороговым значением переключения из “ВКЛ.” состояния в “ВЫКЛ.” состояние Т1/0. Если D>T1/0, то контроллер 56 обрабатывает ожидающийся основной канал поискового вызова в соответствии с стандартом IS-95. Контроллер 56 затем выполняет соответствующие этапы для того, чтобы подготовить подвижную станцию 26 к приему основного канала поискового вызова и обработке связанной пейджинговой последовательности.
Если D<T1/0, то контроллер 56 предполагает, что полная пейджинговая последовательность на основном канале поискового вызова не ожидается. Контроллер 56 затем выключает питание секции приемопередатчика 44 и вводит подвижную станцию 26 в состояние бездействия (состояние “сна”), как определено стандартом IS-95 передачи данных.
БКПВ является модулируемым амплитудной манипуляцией (АМн), и значение D используется для индикации присутствия или отсутствия (вкл. или выкл., соответственно) ожидаемого канала поискового вызова. Точные значения порогового значения перебоя Terasure и порогового значения переключения из “ВКЛ.” состояния в “ВЫКЛ.” состояние T1/0 зависят от применения и могут быть определены специалистом для удовлетворения потребности данного применения.
Альтернативно, функциональная возможность объединителя/детектора БКПВ контроллера 56 может быть осуществлена в соответствии с тем, как это раскрыто в патентной заявке США № 09/695808, зарегистрированной 24 октября 2000 изобретателем настоящего изобретения, озаглавленной WIRELESS COMMUNICATIONS RECEIVER EMPLOYING QUICK PAGING CHANNEL SYMBOLS AND NOISE POWER ESTIMATES TO FACILITATE DETECTION OF A PRIMARY PAGING CHANNEL (номер в реестре D990320), принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Альтернативно, функциональные возможности объединителя/детектора БКПВ контроллера 56 могут быть осуществлены в соответствии с тем, как это раскрыто в патентной заявке США № 60/176464, зарегистрированной 17 января 2000 изобретателем настоящего изобретения, озаглавленной WIRELESS COMMUNICATIONS RECEIVER EMPLOYING QUICK PAGING CHANNEL SYMBOLS AND CHANNEL QUALITY PARAMETERS TO FACILITATE DETECTION OF A PRIMARY PAGING CHANNEL (номер в реестре D990321), принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Альтернативно, функциональные возможности объединителя/детектора БКПВ контроллера 56 могут быть осуществлены в соответствии с тем, как это раскрыто в патентной заявке США № 60/176474, зарегистрированной 17 января 2000 изобретателем настоящего изобретения, озаглавленной QUICK PAGING CHANNEL RECEIVER FOR A WIRELESS COMMUNICATIONS SYSTEM (номер в реестре D990322), принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Альтернативно, функциональные возможности объединителя/детектора БКПВ контроллера 56 могут быть осуществлены в соответствии с тем, как это раскрыто в патентной заявке США № 60/176466, зарегистрированной 17 января 2000 изобретателем настоящего изобретения, озаглавленной DUAL PAGING CHANNEL RECEIVER FOR A WIRELESS COMMUNICATIONS SYSTEM (номер в реестре D990323), принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
Альтернативно, функциональные возможности объединителя/детектора БКПВ контроллера 56 могут быть осуществлены в соответствии с тем, как это раскрыто в патентной заявке США № 60/176463, зарегистрированной 17 января 2000 изобретателем настоящего изобретения, озаглавленной WIRELESS COMMUNICATIONS RECEIVER EMPLOYING A UNIQUE COMBINATION OF QUICK PAGING CHANNEL SYMBOLS TO FACILITATE DETECTION OF A PRIMARY PAGING CHANNEL (номер в реестре D990369), принадлежащей правопреемнику настоящего изобретения и приведенной здесь в качестве ссылки.
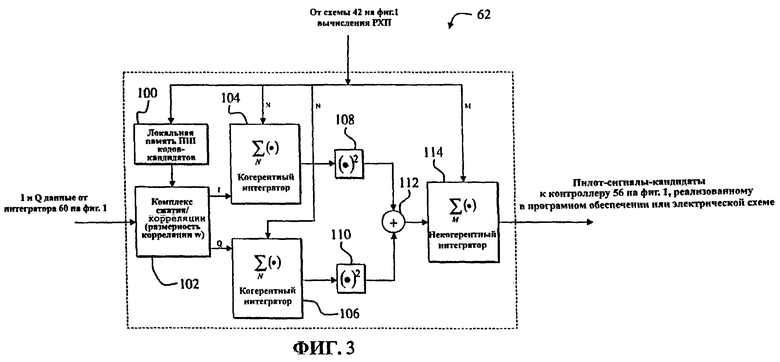
Фиг.3 - более подробная схема поискового устройства 62, показанного на фиг.2. Поисковое устройство 62 включает в себя сверху вниз и слева направо местную память 100 псевдошумового (ПШ, PN) кода-кандидата, комплекс 102 сжатия/корреляции, когерентный интегратор 104 I-канала для когерентного интегрирования I-канала, который выводится из комплекса 102 сжатия/корреляции, когерентный интегратор 106 Q-канала для интегрирования Q-канала, который выводится из комплекса 102 сжатия/корреляции, первую схему 108 возведения в квадрат, вторую схему 110 возведения в квадрат, сумматор 112 и некогерентный интегратор 114.
Комплекс 102 сжатия/корреляции принимает выходной цифровой сигнал из интерполятора 60, показанного на фиг.2. Другой вход комплекса 102 сжатия/корреляции связан с выходом местной памяти 100 ПШ кода-кандидата. Первый выход комплекса 102 сжатия/корреляции соединен со входом когерентного интегратора 104 I-канала. Второй выход комплекса 102 сжатия/корреляции соединен со входом когерентного интегратора 106 Q-канала. Выходы когерентного интегратора 104 I-канала и когерентного интегратора 106 Q-канала соединены со входами первой схемы 108 возведения в квадрат и второй схемы 11 возведения в квадрат соответственно. Выводы схем 108 и 110 возведения в квадрат соединены со входами сумматора 112. Выход сумматора 112 соединен со входом некогерентного интегратора 114. Выход некогерентного интегратора 114 соединен со входом контроллера 56, показанного на фиг.2. Местная память 100 ПШ кода-кандидата и интеграторы 104, 106 и 114 принимают на вход сигналы управления из контроллера 56, показанного на фиг.2.
Обращаясь к фиг.2 и 3, комплекс 102 сжатия/корреляции принимает цифровой сигнал, выходящий из интерполятора 60, и коррелирует этот сигнал с местным ПШ кодом-кандидатом, сохраненным в местной памяти 100 ПШ кода-кандидата. Локальный код-кандидат зависит от применения и может обновляться с помощью программного обеспечения и/или оборудования, функционирующего на контроллере 56 для удовлетворения потребности данного применения. Когда цифровой сигнал, принятый от интерполятора 60, совпадает с локальным кодом-кандидатом, результат корреляции достигает максимума. Результат корреляции между кодом-кандидатом и принятым цифровым сигналом передается к когерентному интегратору 104 I-канала и когерентному интегратору 106 Q-канала. Когерентные интеграторы 104 и 106 суммируют выходной сигнал комплекса 102 сжатия/корреляции по N элементам и обеспечивают передачу результирующих сумм к схемам 108 и 110 возведения в квадрат соответственно. Схемы 108 и 110 возведения в квадрат возводят в квадрат данные суммы. Сумматор 112 складывает полученные возведенные в квадрат значения сумм и подает результат на вход некогерентного интегратора 114. Некогерентный интегратор 114 затем некогерентно суммирует М значений, которые выводятся из сумматора 112, чтобы выдать шумовую оценку пилот-сигнала, которая затем выводится. Шумовая оценка пилот-сигнала включает в себя пики-кандидаты, соответствующие каждому компоненту многолучевого пилот-сигнала.
Схема 42 вычисления РХП на фиг.2 определяет рабочие характеристики приемника на основании PFA и PD, которые вычисляются контроллером 56 и основываются на выходе поискового устройства 62 и выходе схемы 70 вычисления энергии пилот-сигнала. Рабочие характеристики приемника используются программным обеспечением или оборудованием, функционирующим в схеме 42 вычисления РХП, для настройки размерности N когерентного интегрирования для интеграторов 104 и 106 и некогерентной размерности М интегрирования для некогерентного интегратора 114. Размерности интегрирования N и М затем динамически изменяются в ответ на ввод сигнала управления от схемы 42 вычисления РХП, которая определяет новые значения для N и М.
Специалист оценит, что N и М могут быть априорно определены в лаборатории вместо динамического определения через схему 42 вычисления РХП и действующее совместно программное обеспечение, функционирующее на контроллере 56, без отхода от формы настоящего изобретения. Интеграторы, такие как когерентные интеграторы 104 и 106 и некогерентный интегратор 114, чьи размерности интегрирования могут обновляться в ответ на ввод сигнала управления, известны в технике.
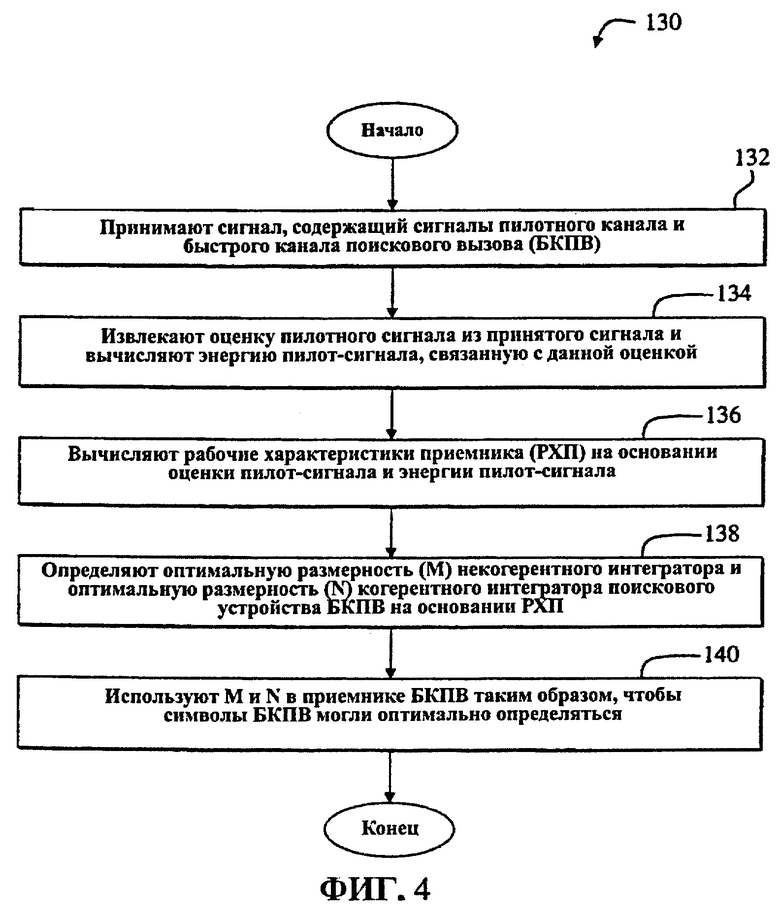
Фиг.4 - последовательность операций способа 130, используемого подвижной станцией 26, показанной на фиг.2, для выбора оптимальной размерности интегрирования для интеграторов 104, 106 и 114 из поискового устройства 62, показанного на фиг.3.
Обращаясь к фиг.2, 3 и 4, на начальном этапе 132 приема принятый цифровой сигнал выводится из интерполятора 60 и передается к поисковому устройству 62. Принятый цифровой сигнал включает в себя канал пилот-сигнала и БКПВ, связанные с пилот-сигналом и компонентами сигнала БКПВ соответственно. Впоследствии управление переходит к этапу 134 извлечения пилот-сигнала.
На следующем этапе 134 извлечения пилот-сигнала оценка компонента пилот-сигнала из принятого сигнала передается с помощью блока 68 оценки пилот-сигнала к схеме 70 вычисления энергии пилот-сигнала. Схема 70 вычисления энергии пилот-сигнала вычисляет энергию пилот-сигнала, связанную с оценкой компонента пилот-сигнала. Впоследствии управление переходит к этапу 136 РХП.
На этапе 136 РХП рабочие характеристики радиоприемного тракта 50, т.е. рабочие характеристики приемника, вычисляются схемой 42 вычисления РХП на основании PFA и РD, полученных из оценок пилот-сигнала, энергии пилот-сигнала и демодулированного выхода канала БКПВ от демодулятора 72 на фиг.2. Способы вычисления PFA и РD из предварительно определенных входных сигналов известны из техники и могут быть адаптированы специалистом при использовании настоящего изобретения. Впоследствии управление переходит на этап 138 выбора параметров.
На этапе 138 выбора параметров контроллер 56 выбирает оптимальные значения для размерности М некогерентного интегрирования некогерентного интегратора 114 и размерности N интегрирования когерентных интеграторов 104 и 106 на основании рабочих характеристик приемника. Параметры М и N выбираются схемой 42 вычисления РХП таким образом, чтобы выбранные минимальные размеры М и N все еще приводили к нахождению рабочих характеристик приемника в приемлемых пределах. Приемлемые пределы зависят от применения и могут быть определены специалистом для удовлетворения потребности данного применения. Впоследствии управление переходит к этапу 140 обновления параметров.
На этапе 140 обновления параметров оптимальные значения для N и М, определенные на этапе 138 осуществления выбора параметров, используются интеграторами 104, 106 и 114 из поискового устройства 62 на фиг.2 и 3. ОЗУ 58 выборок на фиг.2 для обеспечения эффективного поиска имеет размер по меньшей мере М×N элементов.
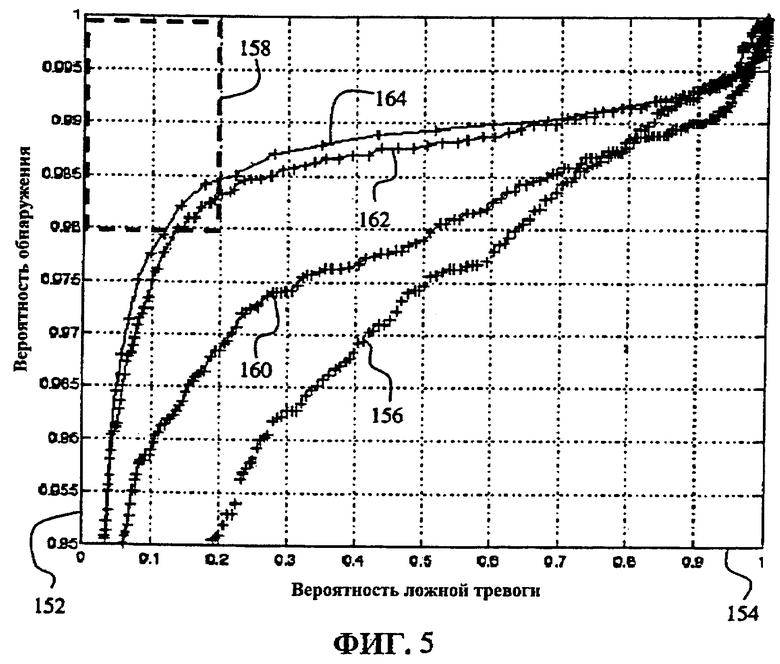
Фиг.5 - типичный график 150 рабочих характеристик приемника, используемого способом, показанным на фиг.4. График 150 включает в себя вертикальную ось 152, представляющую вероятность точного обнаружения символа БКПВ, и горизонтальную ось 154, представляющую вероятность ложного обнаружения символа БКПВ. График 150 и связанные с ним кривые рабочей характеристики приемника представлены для замирающего многолучевого сигнала. Когда обнаруживается большее количество многолучевых компонентов пилот-сигнала, кривые рабочей характеристики приемника изменяются.
Возвращаясь к фиг.2 и 3, первая кривая 156 представляет РХП, когда поисковое устройство 62 использует размерность когерентного интегрирования N=512 и размерность некогерентного интегрирования М=1. Первая кривая 156 имеет относительно плохую РХП и выходит за пределы требуемой области 158.
Вторая кривая 160 соответствует размерности когерентного интегрирования N=512 и размерности некогерентного интегрирования М=2. Вторая кривая 160 имеет слегка улучшенный РХП, но все еще выходит за пределы требуемой области 158.
Третья кривая 162 соответствует размерности когерентного интегрирования N=512 и размерности некогерентного интегрирования М=4. Третья кривая 162 очень близка к идеальной кривой 164, они обе проходят через требуемую область 158. Требуемая область 158 представляет область, в которой и вероятность обнаружения, и вероятность ложной тревоги находятся в приемлемых пределах.
Следовательно, выбирая размерность когерентного интегрирования N=512 и размерность некогерентного интегрирования М=4, качество, близкое к идеальному, достигается с минимальными размерами для М и N.
Таким образом, настоящее изобретение было описано со ссылкой на конкретный вариант осуществления для конкретного применения. Специалист, имеющий доступ к настоящему описанию, может включить дополнительные изменения, применения и варианты осуществления, не выходя за рамки настоящего изобретения, определенные представленной ниже формулой изобретения.
Изобретение относится к системе радиосвязи. Достигаемый технический результат - обнаружение пилот-сигналов и связанных с ними компонентов многолучевого распространения при минимальном потреблении энергии. Система содержит первое средство для обнаружения пилот-сигнала, связанного с быстрым каналом поискового вызова, на основании принятого сигнала, причем первое средство имеет когерентный интегратор первой размерности и некогерентный интегратор второй размерности, второе средство для определения рабочих характеристик системы на основании пилот-сигнала и третье средство для оптимизации первой размерности и второй размерности на основании рабочих характеристик. 6 н. и 22 з.п. ф-лы, 5 ил., 1 табл.

| US 5781543 А, 14.07.1998 | |||
| ПЕРЕДАЧА СИГНАЛОВ С ПЕРЕМЕННОЙ СКОРОСТЬЮ В СИСТЕМЕ СВЯЗИ С РАСШИРЕННЫМ СПЕКТРОМ С ИСПОЛЬЗОВАНИЕМ ГРУППОВОГО КОДИРОВАНИЯ | 1994 |
|
RU2142201C1 |
| US 5805648 A, 08.09.1998 | |||
| ЕР 0936757 A1, 18.08.1999 | |||
| Корректор нулевой линии хроматографа | 1980 |
|
SU951153A1 |
| Устройство для подачи технологической смазки | 1980 |
|
SU954124A1 |

