Настоящая заявка на патент имеет приоритет предварительной заявки на патент США, озаглавленной "Method and System for Aiding Beam Identification In A LEO SatelliteSystem," № 60/342,925, поданной 25 октября 2001 г., включенной в настоящее описание во всей своей полноте в качестве ссылки.
Настоящее изобретение в общем случае относится к спутниковой связи и системам спутниковой связи. Более конкретно настоящее изобретение относится к оценке и компенсации задержек распространения, связанных с идентифицированными спутниковыми лучами в сети спутниковой связи.
Обычные системы спутниковой связи включают в себя одну или несколько наземных базовых станций (ниже называемых шлюзами), пользовательские терминалы, такие как мобильный телефон, и один или несколько спутников, пересылающих сигналы связи между пользовательским терминалом и шлюзом. Шлюз принимает сигналы от спутников и передает их на спутники, которые могут располагаться на низкой околоземной орбите (НОО), обрабатывает соединения или вызовы и связывает или передает вызовы в соответствующие наземные сети или из них, как требуется. Таким образом, шлюз обеспечивает связь, основанную на наземных устройствах, позволяющую системному пользователю связываться с другими системными пользователями либо обеспечивающую линии связи с наземными провайдерами услуг, такими как коммутируемые телефонные сети общего доступа (КТСОД), сети передачи данных, беспроводные системы связи, или другими спутниковыми шлюзами.
Хотя мобильные телефоны или беспроводные пользовательские терминалы обеспечивают пользователям повышенную мобильность и гибкость, быстрое увеличение количества таких телефонов привело к возрастанию требований к соответствующим системам связи. Например, в случае спутниковой системы связи определение положения системного пользователя является критически важным при установлении линии связи с телефоном, определении, какого использовать провайдера услуги, и предоставлении услуги определения положения пользователя телефона, не говоря о других.
Большинство спутников связи проецируют "след", включающий в себя несколько радиолиний или лучей сигналов связи, сгруппированных таким образом, чтобы обеспечивать покрытие для связи с системными пользователями в географической области, покрываемой следом. Конкретный пользовательский терминал может быть назначен, хотя и временно, для использования определенного луча спутника для передачи сигналов связи, исходя из географического положения этого пользовательского терминала. Следовательно, шлюз спутниковой системы связи должен знать положение пользовательского терминала для предоставления соответствующих услуг связи конкретному пользователю через подходящий обслуживаемый луч спутника. Таким образом, знание конкретного луча спутника, обеспечивающего услугу конкретному пользователю, или географической области является базовым для обеспечения возможности шлюза обеспечить услугу связи.
Другим аспектом этого процесса является соответственное установление линии связи с другими провайдерами услуг связи, такими как КТСОД и сети передачи данных. Указанные провайдеры услуг обычно связаны с конкретными географическими областями и обрабатывают только линии связи, связанные с их соответствующими областями. Например, сети могут иметь государственные лицензии или различные коммерческие соглашения с заказчиками об обслуживании конкретных областей. Знание о положении пользовательского терминала также необходимо перед тем, как будут предоставлены указанные услуги, зависящие от географической области. Идентификация луча спутника представляет собой необходимый этап при определении положения пользовательского терминала.
Для определения положения пользователей спутниковой системы связи существует некоторое количество стандартных подходов. Некоторые способы, например, используют измерение расстояния между пользовательским терминалом и связанным с ним спутником и определение скорости изменения, связанной с измеренным расстоянием. При комбинировании указанных измерений расстояния с другими данными может быть точно определено положение пользовательского терминала. Способы определения положения пользовательского терминала с использованием расстояния до пользовательского терминала и скорости изменения расстояния изложены в патентах США № 6078284, озаглавленном "Passive Position Determination Using Two Low Earth Orbit Satellites", 6327534, озаглавленном "Unambiguous Position Determination Using Two Low-Earth Orbit Satellites" и 6107959, озаглавленном "Position Determination Using One Low-Earth Orbit Satellite". Кроме того, патент США № 6137441, озаглавленный "Accurate Range And Range Rate Determination In A Satellite Communications System", описывает способ компенсации перемещения спутника для улучшения точности информации о положении пользовательского терминала.
Однако, хотя относительное перемещение спутника и связанного пользовательского терминала может быть определено, при таких измерениях часто происходят ошибки вследствие таких эффектов, как характеристики антенного усиления, или, например, потому, что конкретный спутник может находиться низко над горизонтом относительно пользовательского терминала. Ошибки часто приводят к тому, что шлюз ошибочно идентифицирует служебный или связной луч спутника и, следовательно, неверно определяет положение пользовательского терминала. Конечным результатом ошибочной идентификации луча спутника часто является отказ в обслуживании системой или даже полная неудача при установлении радиосоединения для соответствующего пользователя.
Другой источник ошибок может возникнуть как часть реализации определенных способов связи или способов доступа пользователей, используемых системами связи для согласования множества системных пользователей. Существует множество способов обеспечения доступа к системе связи множества системных пользователей. Два известных способа множественного доступа включают в себя множественный доступ с временным разделением каналов (МДВРК) и множественный доступ с частотным разделением каналов (МДЧРК), являются широко известными в данной области техники. Однако способы модуляции с расширением спектра, такие как множественный доступ с кодовым разделением каналов (МДКРК), являются гораздо более предпочтительными из-за их возможности согласования множества системных пользователей в условиях возрастающего ограничения на полосу пропускания.
Использование способов МДКРК в системах связи со множественным доступом описано в патентах США № 4901307, озаглавленном "Spread Spectrum Multiple Access Communication System Using Satellite Or Terrestrial Repeaters", и 5103459, озаглавленном "System And Method For Generating Signal Waveforms In A CDMA Cellular Telephone System", права на которые принадлежат правообладателю настоящего изобретения и которые включены в настоящее описание во всей своей полноте в качестве ссылки. Способ обеспечения мобильной связи МДКРК стандартизован в Соединенных Штатах Telecommunications Industry Association в TIA/EIA/IS-95-B, озаглавленном "Mobile Station-Base Station Compatibility Standard for Dual-Mode Wideband Spread Spectrum Cellular System", который в настоящем описании называется IS-95. Другие системы связи или способы описаны в IMT-2000/UM или Международной мобильной системе связи 2000/Универсальной мобильной системе связи, стандарте, охватывающими так называемый широкополосный МДКРК (ШМДКРК), cdma2000 (такой как, например, стандарт cdma2000 1х или 3х) или TD-SCDMA.
В спутниковой системе связи, использующей МДКРК, большое число пользовательских терминалов или пользовательских телефонов, каждый из которых имеет приемопередатчик, связаны через спутники и шлюзы, используя сигналы связи с расширенным спектром. Используя МДКРК, ассоциированный спектр частот может быть многократно повторно использован, тем самым позволяя увеличить пользовательскую емкость системы. Таким образом, МДКРК обладает намного большей спектральной эффективностью, чем другие способы доступа пользователей. Хотя МДКРК является спектрально-эффективной, системы МДКРК являются также в какой-то мере подверженными проблемам, связанным с ошибками неверного определения положения мобильной станции или терминала, описанными выше. Одна из областей, где системы МДКРК являются особенно уязвимыми, является областью, относящейся к эстафетной передаче пользователей.
Эстафетная передача происходит, когда сессия связи мобильной станции или соединение, такое как производимый вызов или разговор, переходит от одного луча спутника к другому лучу спутника. В общем случае существует два типа эстафетной передачи, жесткая эстафетная передача и мягкая эстафетная передача. Во время жесткой эстафетной передачи, если мобильная станция перемещается из области покрытия одного луча в область покрытия другого луча назначения или целевого луча, который должен обеспечивать услугу, терминал разрывает его линию связи с обслуживающим лучом и устанавливает новую линию связи с лучом назначения. Однако во время мягкой эстафетной передачи мобильная станция устанавливает соединение с лучом назначения до разрыва ее связи с текущим лучом. Этот процесс известен в данной области техники как установка-перед-разрывом. Дополнительно во время мягкой эстафетной передачи определение правильной идентификации луча назначения происходит относительно положения обслуживающего луча. Таким образом, во время мягкой эстафетной передачи мобильная станция одновременно связана как с обслуживающим лучом, так и с лучом назначения.
Мягкая эстафетная передача описана в патенте США № 5267621, озаглавленном "Mobile Station-Assisted Soft Handoff in a CDMA Cellular Communications System", права на который принадлежат правообладателю настоящего изобретения и который включен в настоящее описание во всей своей полноте в качестве ссылки. В системе патента '621 процесс мягкой эстафетной передачи основывается на использовании измерения силы пилот-сигнала, передаваемого каждым лучом для обеспечения конкретной мобильной станции доступа к спутнику. В виде фонового режима доступ к системе связи, основанной на МДКРК, или сигналы связи для мобильных станций, обеспечивается по прямой линии связи, то есть в направлении от спутника к мобильной станции. Прямая линия связи включает в себя три типа служебных каналов: по меньшей мере один канал пилот-сигнала, канал синхронизации и один или несколько каналов вызова. Эти служебные каналы используются системой для установления и управления сессий связи с мобильной станцией.
Пилот-канал включает в себя передачу пилот-сигнала, работающего в качестве маяка для потенциальных системных пользователей или абонентов, и используется пользовательскими терминалами или мобильными станциями для получения начальной системной синхронизации и обеспечения надежного отслеживания времени частоты и фазы сигналов, передаваемых базовой станцией. В системах связи с расширенным спектром, например, основанных на IS-95, базовые станции характеризуются или различаются по фазовому смещению в псевдослучайных шумовых (ПШ) кодах, используемых для расширения сигналов связи, также известного как ПШ смещение пилот-сигнала. Обычно все наземные базовые станции используют одинаковый пилот-сигнал с различными фазовыми смещениями кода. В качестве альтернативы, что является более обычным для спутниковых систем, последовательности ПШ кодов, основанные на уникальных ПШ полиномах, используются в системе связи с возможным использованием различных ПШ кодов для различных шлюзов и спутников в каждой орбитальной плоскости. Для специалистов в данной области техники очевидно, что для идентификации определенных источников сигналов или повторителей в системе связи может быть назначено столько ПШ кодов, сколько требуется.
В спутниковой системе связи для определения подходящего луча назначения спутника, то есть луча, покрывающего положение пользовательского терминала, из нескольких лучей-кандидатов, пользовательский терминал выполняет поиск подходящего пилот-сигнала, определяя силу пилот-сигнала и ПШ код или фазовый сдвиг кода. Указанный процесс осуществляется путем выполнения операции корреляции для каждого потенциального кода и фазового сдвига кода, причем выполняется корреляция всех принимаемых пилот-сигналов с конкретным набором значений смещений ПШ кодов. Способ и устройство для выполнения операций корреляции описаны в патенте США № 5805648, озаглавленном "Method And Apparatus For Performirag Search Acquisition In A CDMA Communication System", права на который принадлежат правообладателю настоящего изобретения и который включен в настоящее описание во всей своей полноте в качестве ссылки.
Для начального установления линии связи с системой связи пользовательский терминал сначала должен принять пилот-сигнал, связанный с системой. Пользовательский терминал получает информацию о ПШ коде и фазовом сдвиге данного пилот-сигнала, когда он демодулирует пилот-сигнал и получает системные временные параметры, когда демодулирует канал синхронизации. Однако, перед тем как пользовательский терминал переключится на новый луч спутника, он должен выполнить корреляцию вновь полученных пилот-сигналов с набором ПШ кодов и значений фазового сдвига для определения ПШ сдвига наиболее вероятного луча назначения спутника.
Величина задержки распространения между спутниками системы связи и пользовательским терминалом часто бывает значительной и неопределенной и может вызывать неизвестные сдвиги в значении определяемого ПШ смещения. Следовательно, пользовательский терминал определяет больший фазовый сдвиг вследствие задержки, а не из источника исходного сигнала. Такие сдвиги могут приводить к неверной идентификации пользовательским терминалом нового луча для переключения или луча назначения спутника. В указанных ссылках неизвестные задержки распространения особенно вероятны, когда новый спутник назначения находится низко над горизонтом по сравнению с текущим обслуживающим спутником.
Таким образом, необходим способ компенсации эффектов задержек распространения путем предоставления возможности пользовательскому терминалу независимой верификации измерений ПШ смещения, связанного со спутниками назначения или новыми целевыми спутниками, способом, учитывающим задержки распространения.
Настоящее изобретение предлагает систему и способ для независимой верификации измерений ПШ смещения. Используя доплеровский сдвиг и скорость изменения доплеровского сдвига для спутника назначения, в пользовательском терминале может производиться оценка расстояния до спутника. При помощи фильтрации указанных измерений и используя встроенное математическое обеспечение, пользовательский терминал может преобразовывать измерения доплеровского сдвига в оценку расстояния, которая в свою очередь может быть преобразована в оценку значения ПШ смещения. Затем оценка ПШ смещения может сравниваться со значением ПШ смещения, измеренного пользовательским терминалом. Если оценка ПШ смещения отличается от измеренного ПШ смещения более чем на заранее заданную величину, может быть констатирована ошибка или измерения могут быть забракованы.
В соответствии с принципами настоящего изобретения, раскрытыми и подробно изложенными в настоящем описании, изобретение включает в себя способ определения ошибок временного смещения в системе связи, такой как спутниковая система. Способ содержит определение в терминале первого временного смещения, связанного с первым сигналом передатчика от первого передатчика, такого как первый луч от первого спутника. Способ также включает в себя определение в терминале второго временного смещения, связанного с сигналом второго передатчика от второго передатчика, такого как второй луч от второго спутника, основываясь на первом временном смещении. Оценивается первое расстояние от пользовательского терминала до первого передатчика или спутника, и оценивается второе расстояние от пользовательского терминала до второго передатчика или спутника. В заключение определяется ошибка между разницей во временах прибытия сигналов и разницей между оцененными первым и вторым расстояниями.
В дополнительных аспектах оценка первого и второго расстояний соответственно включает в себя определение доплеровской частоты, связанной с первым и вторым спутниковыми лучами и скорости изменения определенной доплеровской частоты.
Также предлагается способ выполнения идентификации луча в пользовательском терминале, выполненном с возможностью связи через низкоорбитальную спутниковую систему, причем пользовательский терминал включает в себя процессор, выполненный с возможностью приема первого спутникового луча, содержащего первое временное смещение, от первого обслуживающего спутника, и выполнение эстафетной передачи с первого спутникового луча на второй спутниковый луч, причем второй спутниковый луч излучается со спутника назначения. Способ включает в себя прием второго спутникового луча в пользовательском терминале, определение второго временного смещения второго спутникового луча, основываясь на первом временном смещении; идентификацию второго спутникового луча, основываясь на втором временном смещении; оценку первого расстояния от пользовательского терминала до обслуживающего спутника; оценку второго расстояния от пользовательского терминала до спутника назначения; определение временной разности, основываясь на разности между оценкой первого расстояния и оценкой второго расстояния; вычисление разности между вторым временным смещением и временной разностью и подтверждение идентификации луча второго спутника, если разность между вторым временным смещением и временной разностью превышает заранее определенное значение.
Иллюстративный пользовательский терминал, выполненный согласно настоящему изобретению, содержит блок приема, выполненный с возможностью приема и демодуляции сигналов первого и второго передатчиков, связанных соответственно с первым и вторым передатчиками, такими как сигналы первого и второго спутниковых лучей, связанных соответственно с первым и вторым спутниковыми лучами. Первый и второй спутниковые лучи принимаются соответственно с первого и второго спутников. Пользовательский терминал также включает в себя процессор, связанный с блоком приема. Процессор выполнен с возможностью (i) определения первого временного смещения, связанного с сигналом первого передатчика или спутникового луча, причем первое временное смещение является представлением первого ИД (идентификатора) луча, первого спутникового луча (ii) определения второго временного смещения, связанного с сигналом второго передатчика или спутникового луча, причем второе временное смещение определяется, основываясь на первом временном смещении и является представлением второго ИД (идентификатора) луча, второго спутникового луча и (iii) измерения в пользовательском терминале соответствующих доплеровских характеристик, связанных с сигналами первого и второго спутниковых лучей соответственно для верификации первого и второго ИД лучей.
Соответствующие доплеровские характеристики используются для определения первого и второго расстояний, связанных соответственно с пользовательским терминалом и первым и вторым спутником. В конечном счете, пользовательский терминал выполнен с возможностью преобразования первого и второго расстояния в относительную временную разницу и определения наличия ошибки во втором ИД луча, исходя из сравнения указанной временной разности и оценки разности расстояний, содержащей ИД лучей.
Отличительные признаки и преимущества настоящего изобретения включают в себя возможность независимой верификации ПШ смещения пользовательского терминала или измерения ИД луча. Такая возможность улучшает точность идентификации спутниковых лучей, тем самым увеличивая вероятность получения доступа пользовательского терминала к системе связи. Могут быть определены и компенсированы неизвестные задержки распространения, имеющие своей причиной низкую высоту спутников над горизонтом и проистекающие отсюда ошибки ПШ смещения. Следовательно, может быть увеличена точность определения пользовательским терминалом ИД луча спутника, лучей спутника назначения. Соответственно, пользователь может использовать спутниковую систему связи, будучи уверенным, что запрошенная услуга системы не будет прервана либо в услуге не будет отказано.
Сопровождающие чертежи, включенные в описание и составляющие его часть, иллюстрируют варианты осуществления настоящего изобретения и, совместно с описанием, объясняют задачи, преимущества и принципы настоящего изобретения.
Фиг. 1 является блок-схемой, иллюстрирующей обычную низкоорбитальную спутниковую систему связи;
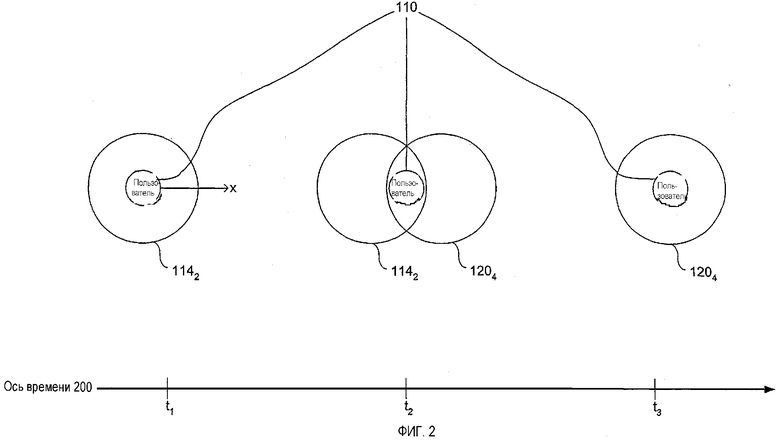
Фиг. 2 является иллюстрацией, изображающей мягкую эстафетную передачу пользовательского терминала от одного спутника к другому спутнику в системе по Фиг. 1;
Фиг. 3 является блок-схемой, описывающей формат паттерна луча одного спутника или следа, в системе по Фиг. 1.
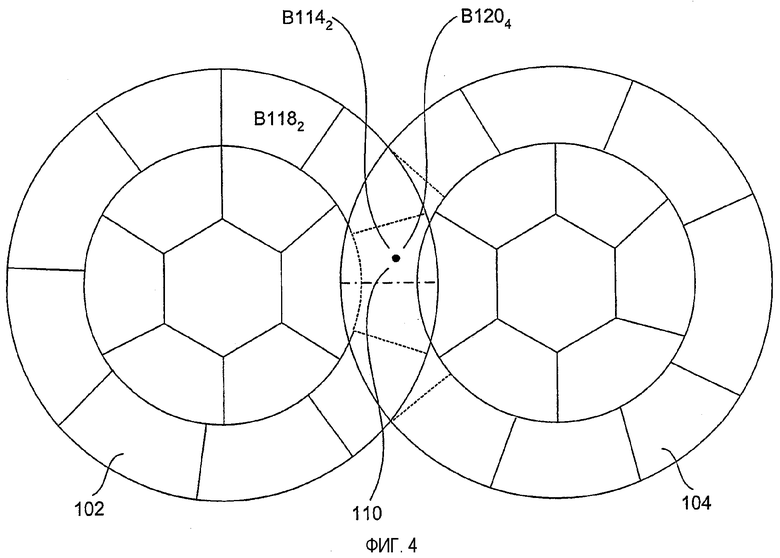
На Фиг. 4 показан пользователь внутри области покрытия следов двух спутников в системе по Фиг. 1;
Фиг. 5 является временной диаграммой, описывающей ошибки идентификации луча, являющиеся следствием задержек распространения;
Фиг. 6 является блок-схемой, описывающей обычную процедуру определения положения спутников терминалом;
Фиг. 7 является блок-схемой, описывающей ошибки определения положения пользовательского терминала, являющиеся следствием задержек распространения, показанных на Фиг. 5;
Фиг. 8 является блок-схемой пользовательского терминала, разработанного и выполненного согласно настоящему изобретению;
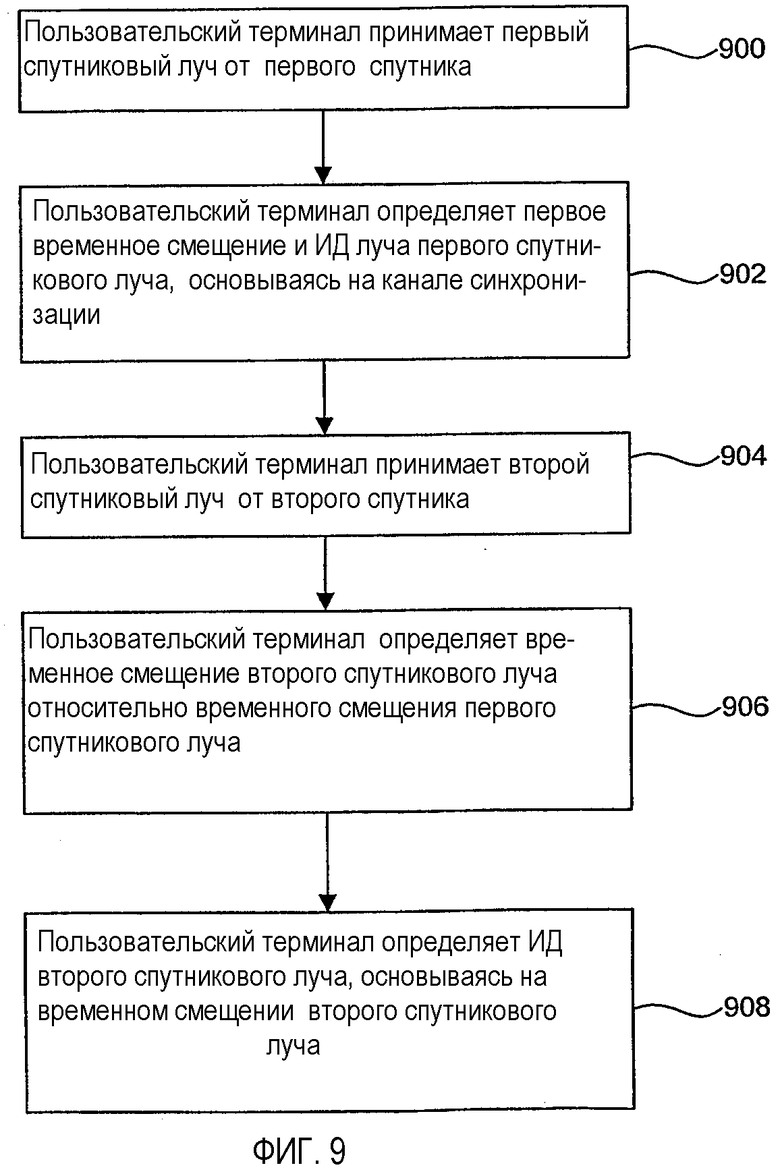
Фиг. 9 является блок-схемой, описывающей способ определения временного смещения, связанного с первым и вторым спутниковыми лучами от соответствующих спутников;
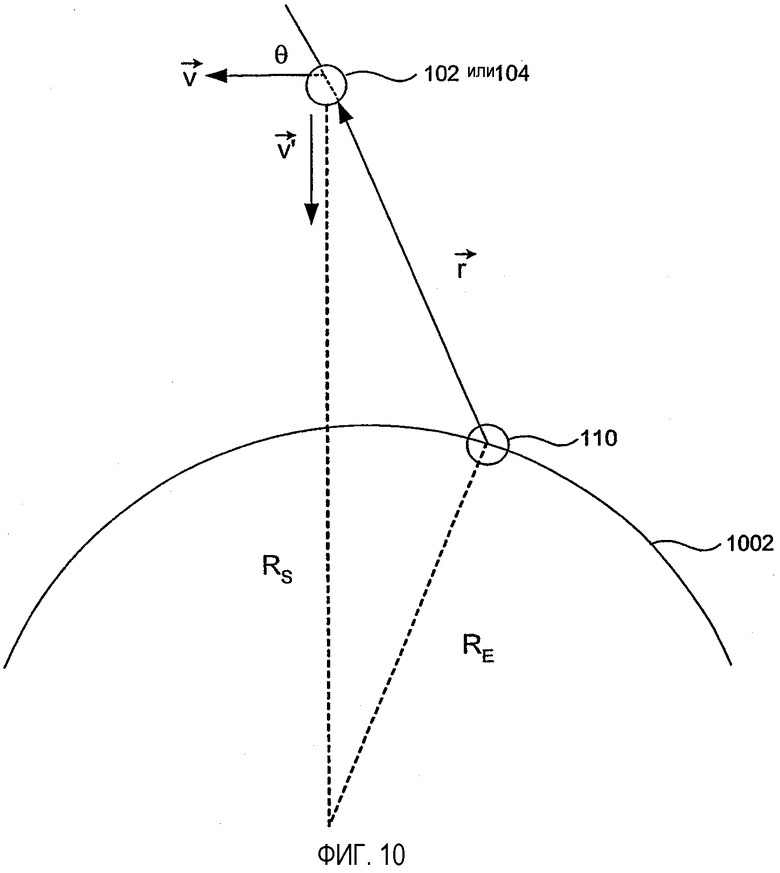
на Фиг. 10 показана взаимосвязь с определенных векторов, связанных со спутниками и пользовательским терминалом;
Фиг. 11 является блок-схемой, описывающей способ определения расстояния от пользовательского терминала до первого и второго спутников, связанных с ним; и
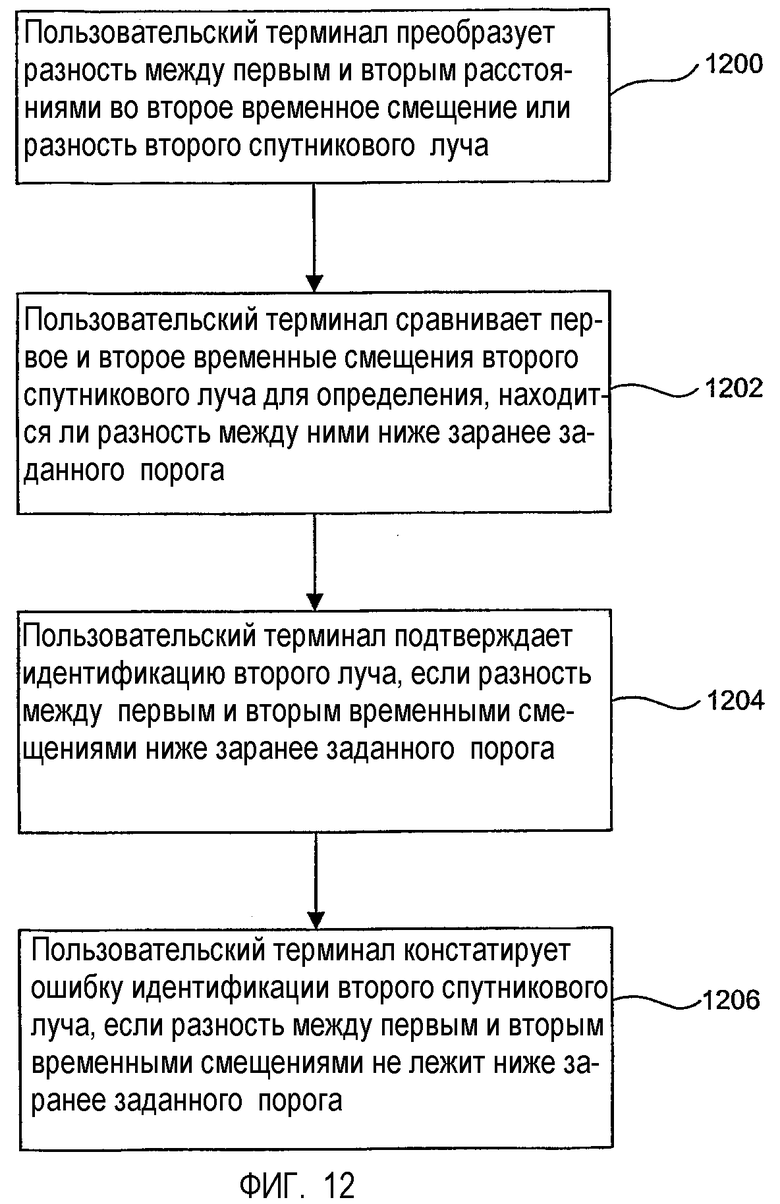
Фиг. 12 является блок-схемой, описывающей способ определения временной разницы, связанной с расстояниями, определенными способом по Фиг. 10.
Нижеследующее подробное описание настоящего изобретения ссылается на сопутствующие чертежи, показывающие иллюстративные варианты осуществления изобретения, совместимые с настоящим изобретением. Возможны другие варианты осуществления настоящего изобретения, и могут быть сделаны модификации вариантов осуществления в пределах сущности и объема настоящего изобретения. Таким образом, нижеследующее подробное описание не ограничивает настоящее изобретение. Напротив, сущность и объем настоящего изобретения определяются прилагаемой формулой изобретения.
Для специалистов в данной области техники будет очевидно, что настоящее изобретение, описанное ниже, может быть реализовано в виде многих отличных вариантов осуществления аппаратных средств, программных средств, встроенного программного обеспечения и/или особенностей, иллюстрированных на фигурах. Любой рабочий программный код со специализированными управляющими аппаратными средствами, реализующими указанные варианты осуществления, не является ограничивающим настоящее изобретение. Таким образом, работа и свойства настоящего изобретения будут изложены с учетом возможности модификаций и изменений вариантов осуществления, что определяет уровень детализации в настоящем описании.
На Фиг. 1 показана иллюстративная спутниковая система связи, в которой применимо настоящее изобретение. Хотя предполагается, что указанная система связи использует протоколы связи и сигналы МДКРК, это не является обязательным. На Фиг.1 иллюстративная НО (низкоорбитальная) спутниковая система связи включает в себя соответственно первый и второй спутники 102 и 104. Также в ее состав входят шлюзы 106 и 108 и портативный пользовательский терминал 110, включающий в себя блок 111 связи для передачи и приема сигналов через антенну 109. Наконец, присутствует мобильный пользовательский терминал 113. Шлюзы 106 и 108 обрабатывают вызовы, связанные с портативным пользовательским терминалом 110 и мобильным терминалом 113, и обеспечивают линии связи с телефонными сетями 114 и сетями 115 передачи данных. Спутники 102 и 104 передают радиочастотные сигналы, т.е. спутниковые лучи, для обеспечения линий связи между шлюзами 106 и 108 и пользовательскими терминалами 110 и 113. Более точно, спутник 102 передает спутниковые лучи В1122, В1142, В1162 и В1182, и спутник 104 передает спутниковые лучи В1194, В1204.
В этом примере пользовательские терминалы 110 и 113 каждый имеют или включают в себя приспособление или устройство беспроводной связи, такое как сотовый телефон, беспроводную телефонную гарнитуру, приемопередатчик данных, пейджер или приемник определения положения, не рассматривая их в качестве ограничения. Помимо этого каждый пользовательский терминал может быть переносным, портативным, например, установленным на транспортном средстве (в том числе, например, на автомобилях, грузовиках, лодках, поездах и самолетах), или стационарным, как это необходимо. Например, на Фиг. 1 показан пользовательский терминал 110 в виде переносного устройства и пользовательский терминал 113 в виде портативного устройства, размещенного на транспортном средстве. Устройства беспроводной связи также иногда называются мобильными беспроводными терминалами, пользовательскими терминалами, мобильными устройствами беспроводной связи, абонентскими блоками, мобильными блоками, мобильными станциями, мобильными радиостанциями или просто "пользователями", "мобильными устройствами", "терминалами" или "абонентами" в некоторых системах связи в зависимости от предпочтения.
В общем случае спутники обеспечивают множество лучей внутри "следов", которые должны покрывать отдельные, в общем случае, не перекрывающиеся географические области. Так, спутниковые лучи В112, В114, В116 и В118-В120 обеспечивают покрытие спутниками различных географических областей с заранее заданной структурой. В общем случае, множество лучей с различными частотами, которые называются каналами МДКРК, "под-лучами" или сигналами с частотным разделением каналов (ЧРК), частотными слотами или каналами, могут перекрывать одни и те же географические области. Один из вариантов осуществления иллюстративной системы 100 включает в себя множество спутников, движущихся в различных орбитальных плоскостях на высоте около 1400 километров, обслуживая большое количество пользовательских терминалов. Однако настоящее изобретение не ограничивается такой конфигурацией и может применяться при различных конфигурациях спутниковых систем и шлюзов, в том числе для других высот орбит, расстояний и спутниковых группировок, и т.п. В иллюстративной системе по Фиг.1 шлюзы 106 и 108 также управляют назначением конкретных спутников пользовательским терминалам. При перемещении пользовательских терминалов из одной географической области покрытия в другую географическую область покрытия происходит эстафетная передача от одного спутникового луча к другому спутниковому лучу или от одного спутника к другому для обеспечения непрерывного покрытия пользовательского терминала.
На Фиг. 2 показан процесс эстафетной передачи пользователя от одного спутникового луча к другому спутниковому лучу. На Фиг.2 портативный пользовательский терминал перемещается по оси 200 времени. В момент времени t1 терминал 110 находится внутри области покрытия луча В114 обслуживающего спутника. При перемещении терминала 110 в направлении х, в момент времени t2 пользовательский терминал будет располагаться как в области покрытия спутникового луча В1142, спутника 102, так и в области покрытия спутникового луча В1204, спутника 104. Здесь, перед тем как обслуживающий шлюз, такой как шлюз 106, сможет передать сообщения и вызовы на терминал 110, терминал 110 должен передать шлюзу 106 точную идентификацию спутниковых лучей В114 и В120. В иллюстративном варианте осуществления индивидуальные спутники могут иметь до 16 или большее количество спутниковых лучей на каждой частоте для данного следа. Таким образом, каждый спутник может обеспечить пользователям линии связи на любом из 16 различных спутниковых лучей, как показано на Фиг.3.
На Фиг. 3 показана иллюстративная область покрытия или след одного спутника. То есть следы каждого спутника 102 и 104 включают в себя отдельные спутниковые лучи В105-В120, причем каждый имеет свое положение или структуру внутри следа. В следах находятся спутниковые лучи В112, В114, В116 и В118-120, показанные на Фиг. 1. Также, как более детально обсуждается ниже, различные спутники могут одновременно иметь одинаковые конфигурации лучей и идентификационные номера лучей. Отдельные лучи одного спутника могут отличаться друг от друга на основе их смещений ПШ кода, как обсуждается ниже. Лучи от смежных спутников могут отличаться друг от друга на основе различных ПШ полиномов, как обсуждается ниже. Различные ПШ смещения также могут использоваться для различения лучей смежных спутников, имеющих одинаковые ИД номера лучей, в некоторых системах, например, в которых параметры ПШ последовательностей, например длина, различаются.
На Фиг. 4 приведена более подробная иллюстрация пользовательского терминала 110, расположенного внутри областей покрытия спутниковых лучей В1142 и В1204. На Фиг.4 терминал 110 должен иметь возможность четкой идентификации луча В1204 назначения. Хотя лучами В1142 и В1204 используются одинаковые пилот-сигналы, эти лучи отличаются по связанным с ними ПШ смещениям и/или ПШ полиномам, плюс некоторой неизвестной задержкой распространения. Вновь обращаясь к Фиг.3, каждый из спутниковых лучей В105-В120 имеет уникальное ПШ смещение, соответствующее общей временной последовательности, общей для данных лучей. Более точно в иллюстративной системе связи по Фиг.1 разница во временных параметрах (смещения кода) между отдельными спутниковыми лучами составляет около 15 миллисекунд (мс). Таким образом, задержки распространения, примерно равные или превышающие 15 мс, могут помешать точному измерению ПШ смещения пользовательским терминалом 110. В результате может произойти ошибочная идентификация спутникового луча В1204. Смещение ПШ фазы, связанное с данным спутниковым лучом, тесно коррелирует с его ИД луча. Дополнительно другие факторы, такие как угол подъема и различия в антенных усилениях, также могут вносить вклад в уровень ошибки точной идентификации соответствующих спутниковых лучей.
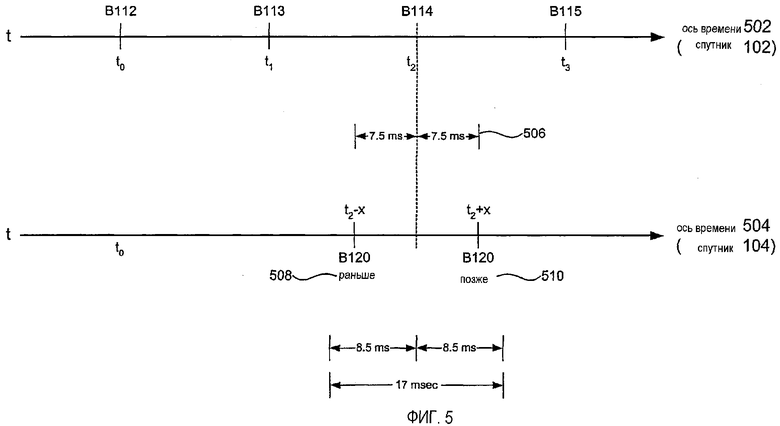
Фиг. 5 иллюстрирует возможное влияние задержки распространения между спутниками на идентификацию спутниковых лучей. На Фиг. 5 относительные временные параметры, связанные с каждым из спутников 102 и 104, показаны для сравнения на соответствующих временных осях 502 и 504. Как обсуждалось выше, в настоящем иллюстративном варианте осуществления лучи от одного спутника имеют одинаковые пилот-сигналы, хотя каждый сигнал имеет различное ПШ смещение. Однако спутниковые лучи от смежных спутников отличаются друг от друга по разнице во времени прибытия, измеряемой пользовательским терминалом и вызванной задержкой распространения между спутниками.
Ось времени 502 отражает связь временных параметров между спутниковыми лучами В1122-В1152 спутника 102. Ось времени 502 иллюстрирует потенциальную связь временных параметров между лучом В1204 спутника 104 и лучом В1142 спутника 102. Как показано, при такой связи временных параметров может быть допустимой небольшая временная ошибка 506. Указанная небольшая временная ошибка 506 примерно равна максимально ожидаемой задержке распространения между спутниками. Указанная задержка составляет примерно плюс или минус 7,5 мсек. Однако задержки распространения, превышающие данную величину, могут быть преобразованы в ошибки измерения ПШ смещения кода и, в конечном счете, могут привести к ошибочной идентификации соответствующего спутникового луча.
Для иллюстрации спутниковый луч В1142 спутника 102 показан достигающим пользовательского терминала 110 в момент времени t2 на оси времени 502. Однако луч В1204 спутника 104, показанный на оси времени 504, может достичь данного пользовательского терминала до или после того, как его достиг спутниковый луч В1142 спутника 102. Таким образом, луч В1204 спутника 104 может прибыть раньше, чем момент t2 на оси времени 502, на величину, равную t2-х, или может прибыть позже этой точки на величину t2+х вследствие задержки распространения. Следовательно, задержка распространения, как показано на Фиг. 5, составляет примерно плюс или минус 8,5 мсек. В иллюстративной системе 100 связи промежуток между смежными лучами составляет всего около 15 мсек. Следовательно, задержка, примерно равная или превышающая 15 мсек, будет вызывать ошибки измерения ПШ смещения. Задержка распространения плюс или минус 8,5 мсек, показанная на Фиг. 5, составляет задержку 17 мсек, которая может вызвать ошибки измерений ПШ смещения. Следовательно, пользовательский терминал 110 будет ошибочно идентифицировать спутниковый луч В1142 спутника 104 назначения. Значимость такой ошибочной идентификации более подробно проиллюстрирована на Фиг.6 и 7.
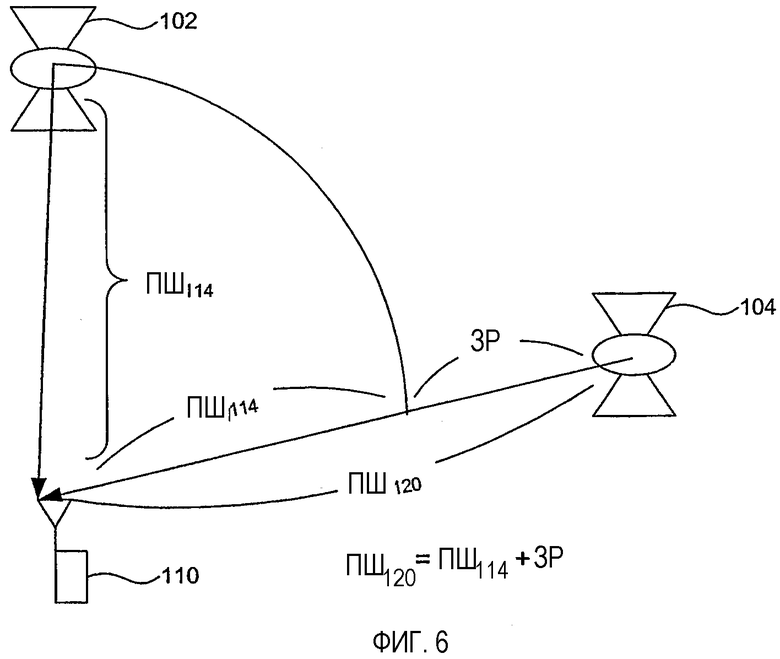
На Фиг. 6 показана связь временных параметров между пользовательским терминалом 110, обслуживающим спутником 102 и спутником 104 назначения. В частности, на Фиг. 6 показана связь между смещением ПШ114 фазы спутникового луча В1142 и смещением ПШ120 фазы спутникового луча В1204. Как указывалось выше, ПШ смещения у различных лучей одного спутника соотносятся на основе ИД луча. ПШ смещения лучей различных спутников соотносятся аналогично. На Фиг 6, например, ПШ120 является функцией ПШ114 смещения плюс ожидаемая максимальная задержка распространения, ЗР, между пользовательским терминалом 110 и спутником 104 назначения. Однако, если реальная задержка распространения отличается от ожидаемой максимальной задержки распространения ЗР на величину, большую величины 506, ПШ120 может быть определен не точно. Пользовательские терминалы выполняют поиск ПШ смещения лучей спутника назначения, выполняя поиск в окне доступных значений ПШ смещений (все возможные смещения). Такие способы поиска хорошо известны в данной области техники. Однако такие способы не являются защищенными от ошибок и могут в конечном счете являться источниками ошибок определения положения или идентификации.
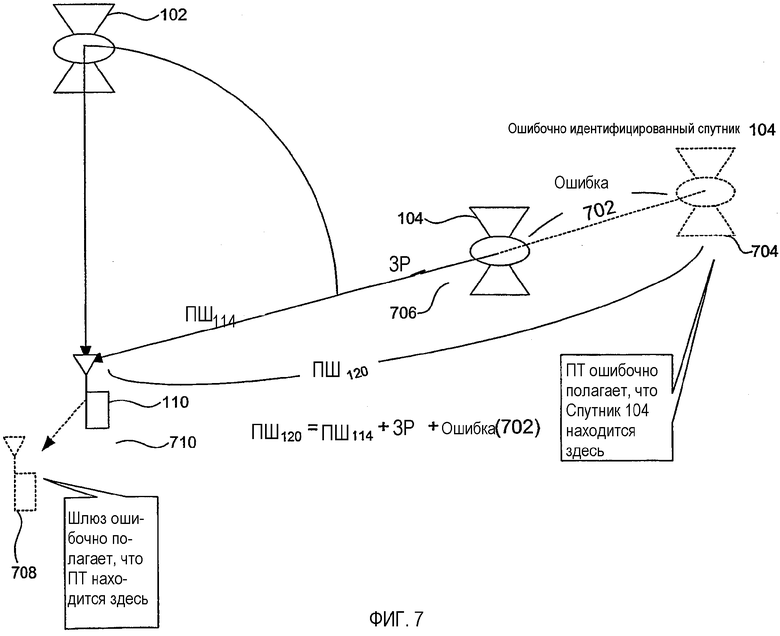
Фиг. 7 иллюстрирует влияние ошибочного измерения смещения ПШ кода. На Фиг.7 ошибка пользовательского терминала 110 при измерении задержки распространения ЗР может привести к ошибке 702. Ошибка 702 в конечном счете может привести к тому, что шлюз 106 будет считать, что спутник 104 находится в неверной позиции 704, а не в его реальной позиции 706. Шлюз 106 также может считать, что пользовательский терминал 110 находится в неверной позиции 708, а не в его реальной позиции 710 и в результате может назначить неподходящую услугу или вообще прервать доступ пользовательского терминала 110. Таким образом, применяя традиционные способы, пользовательский терминал не распознает указанный ПШ120, сумму ПШ114 и ЗР, также включающий в себя ошибку 720. Это является особенно значимым, если ошибка 720 превышает ожидаемый тайминг между спутниковыми лучами одного спутника.
Настоящее изобретение предлагает пользовательский терминал 110, выполненный с возможностью независимой верификации измерения смещения фазы ПШ кода луча спутника назначения. Такая независимая верификация может (способствовать) установлению более надежных линий связи между пользовательскими терминалами и шлюзами иллюстративной системы 100 связи.
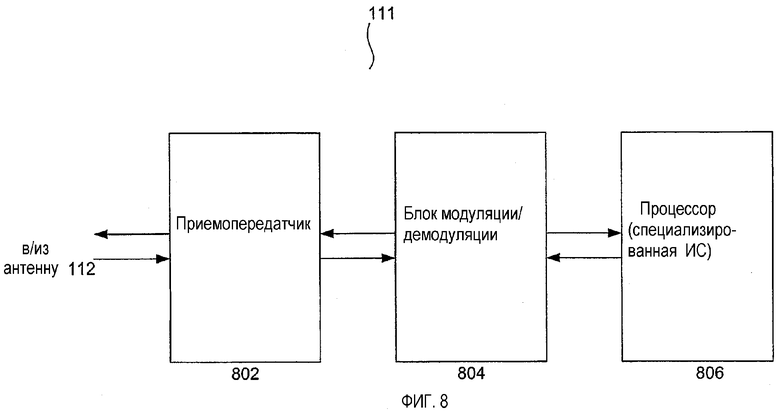
Как показано на Фиг. 8, блок 111 связи включает в себя приемопередатчик 802 для передачи и приема сигналов через антенну 109 и блок 804 модуляции/демодуляции для модуляции и демодуляции передаваемых и принимаемых сигналов соответственно. Процессор 806 электрически связан с блоком 111 связи для обработки сигналов. Процессор 806 может включать в себя хорошо известные стандартные элементы или аппаратные средства общего назначения или выполняющие общие функции, включающие в себя множество программируемых электронных устройств или компьютеров, работающих под управлением команд, или встроенных программных средств, или инструкций программного обеспечения для выполнения требуемых функций. Примеры включают в себя контроллер под управлением программных средств, микропроцессор, один или несколько цифровых сигнальных процессоров (ЦСП), схемные блоки, выполняющие заданные функции, и специализированные интегральные схемы (специализированные ИС). Когда пользовательский терминал вначале принимает обслуживающий спутник, а позже выполняется эстафетная передача на спутник назначения, в процессоре 806 для независимой верификации измерения ПШ смещения спутника назначения выполняется способ или процесс, показанный на Фиг. 9.
По Фиг. 9 пользовательский терминал устанавливает линию связи, используя иллюстративную систему 100 связи. Так, терминал 110 вначале принимает спутниковый луч В1142 от спутника 102, как показано на этапе 900. Пилот-сигнал, действуя как маяк, извещает пользовательский терминал 110 о наличии спутникового луча В120. Поскольку пользовательский терминал 110 может находиться в области покрытия других спутниковых лучей, пользовательский терминал 110 измеряет силу сигналов всех принимаемых пилот-сигналов для гарантии соединения с самым интенсивным лучом ближайшего спутника. Если принимаемый пилот-сигнал имеет интенсивность, превышающую заранее определенное значение, пилот-сигнал передается из приемника 802 в демодулятор 804, где выполняется демодуляция.
После того, как пользовательский терминал 110 успешно принял пилот-сигнал от спутника 102 и, следовательно, получил возможность демодулировать канал синхронизации, пользовательский терминал 110 определяет смешение ПШ кода принимаемого пилот-сигнала. Как показано на этапе 902, ПШ смещение представляет ИД луча. В настоящем иллюстративном варианте осуществления изобретения пользовательский терминал 110 в этот момент знает, что он принимает спутниковый луч В1142 спутника 102. Пока пользовательский терминал остается активным, ему не требуется еще раз демодулировать канал синхронизации МДКРК. Таким образом, для данного пользовательского терминала демодуляция пилот-канала и канала синхронизации требуется только один раз за конкретную сессию связи. На время указанной сессии пользовательский терминал 110 извещен о ИД спутникового луча.
Знание ИД спутникового луча является критическим, поскольку он является ключом, при помощи которого соответствующий шлюз обеспечивает пользовательскому терминалу доступ к каналу вызова. Канал вызова является носителем, посредством которого другие сообщения, относящиеся к коммуникационному процессу, и информация о вызовах направляется в пользовательский терминал. Таким образом, если пользовательский терминал 110 должен поддерживать его линии связи, необходим доступ к каналу вызова.
В конечном счете, обслуживающая линия или линия связи пользовательского терминала 110 будет передана в процессе эстафетной передачи от текущего обслуживающего спутникового луча В1142 к целевому или новому лучу спутника назначения, как показано на Фиг.2 и описано этапом 904 по Фиг.9. Когда пользовательский терминал 110 первоначально принимает новый пилот-сигнал, связанный с потенциальным лучом спутника назначения, он первоначально не имеет возможности узнать соответствующий ИД луча. Для определения ИД луча пользовательский терминал 110 должен сначала определить ПШ смещение нового луча, как показано на этапе 906. Для определения ПШ смещения нового пилот-сигнала пользовательский терминал 110 выполняет поиск в окне доступных значений смещений ПШ фазы (все возможные смещения), которые могут храниться в памяти (не показано) процессора 806. Для выполнения указанного поиска пользовательский терминал 110 использует ПШ смещение обслуживающего спутникового луча В1142 как опорную точку. Как более ясно показано на Фиг.6, величина ПШ смещения ПШ120 спутникового луча назначения представляет собой сумму величины ПШ смещения ПШ114 обслуживающего спутникового луча и максимальной ожидаемой задержки распространения ЗР. Пользовательский терминал 110 выполняет эту процедуру, основываясь на стандартных временных отношениях между спутниковыми лучами одного спутника, как обсуждалось выше.
В иллюстративной системе 100 связи временные параметры или смещения пилот-сигналов для смежных спутниковых лучей одного спутника разделены примерно на 15 мс. Таким образом, когда пользовательский терминал 110 выполняет поиск и находит пилот-сигнал спутникового луча назначения от другого спутника, он использует заранее определенные временные шаги и, основываясь на реальном временном разделении, может быть установлен пробный ИД луча. Этот процесс описывается этапом 908. В системе 100 связи опорное ПШ временное смещение, определенное на шаге 902, представляет собой ПШ114, показанное на Фиг.6.
Как указывалось выше, данный процесс учитывает небольшие ошибки ПШ смещения, такие как ошибка 506 по Фиг.5. Ошибки такого порядка должны быть не превышающими максимальную ожидаемую задержку распространения и меньшими, чем 15 мс, разделяющие лучи. Однако задержки распространения, превышающие значение ошибки 506, могут приводить к тому, что пользовательский терминал 110 некорректно выполняет измерения ПШ смещений вновь принимаемых пилот-сигналов. Однако в иллюстративной системе 100 связи используется независимый способ проверки ПШ смещения в качестве проверки верности или правильности процесса определения ПШ смещения на этапе 906.
Способ независимой проверки использует доплеровский сдвиг и скорость изменения доплеровского сдвига спутника 102, осуществляющего текущее обслуживание, и спутника назначения или целевого спутника 104, планируемого для осуществления продолжения обслуживания, для оценки их относительных расстояний от пользовательского терминала 110. Таким образом, пользовательский терминал 110 выполнен с возможностью выполнения периодических измерений доплеровского сдвига и скорости изменения доплеровского сдвига пилот-сигналов спутника. Использование доплеровских характеристик дает способ измерения задержек распространения сигнала, связанных с различием в расстоянии между спутниками и пользовательским терминалом 110.
Посредством фильтрации измерений доплеровского сдвига пользовательский терминал 110 способен преобразовать измерения доплеровского сдвига в оценки расстояния. Разница между оценками расстояний затем преобразуется в значение оценки смешения ПШ кода. Указанное значение оценки смешения ПШ кода затем сравнивают со значением, определенным на этапе 906. Если значение оценки смешения ПШ кода соответствует, в пределах ожидаемой задержки распространения (меньше или равно пороговому значению), значению, определенному на этапе 906, то ИД спутникового луча назначения, определенный на этапе 908, может считаться подтвержденным или верифицированным. Более подробное обсуждение определения доплеровского сдвига и скорости изменения доплеровского сдвига приводится ниже, со ссылкой на Фиг. 10. Один из способов измерения расстояния и скорости изменения расстояния спутников описан в патенте США № 6137441, озаглавленном "Accurate Range And Range Rate Determination In A Satellite Communications System", права на который принадлежат правообладателю настоящего изобретения и который включен в настоящее описание во всей своей полноте в качестве ссылки.
На Фиг. 10 показана взаимосвязь векторов, существующая между спутниками 102 или 104 и пользовательским терминалом 110. Более точно пользовательский терминал 110 измеряет доплеровский сдвиг и скорость изменения доплеровского сдвига спутниковых лучей. Перед обсуждением этой процедуры в Таблице 1 приводятся несколько величин, имеющих к этому отношение.
Идея диаграммы на Фиг. 10 заключается в том, что спутник 102 или 104 обращается вокруг Земли 1002 по примерно круговой орбите. Хотя Земля имеет неправильную форму и, таким образом, не является совершенно круглой, при измерении доплеровских характеристик указанными нерегулярностями можно пренебречь. На Фиг.10 вектор v представляет скорость спутника, вектор v' представляет ускорение спутника, и вектор r представляет вектор направления, направленный от пользовательского терминала 100 к спутнику 102 или 104. Угол θ образован между вектором скорости v и вектором расстояния до спутника r.
Задачей является вычисление длины вектора направления R=|r|, которая также определяется как расстояние от спутников 102/104 до пользовательского терминала 110. Пользовательский терминал 110 также должен определить, как быстро изменяется расстояние R, что называется скоростью изменения расстояния R'. Скорость изменения расстояния R' дается выражением:
Используя приведенное выше определение R' и беря производную от обеих частей уравнения (1), получаем для значения ускорения изменения расстояния, которое выражается как:

где v' является ускорением спутников, функцией силы притяжения Земли и r' соответствует скорости спутников.
Далее каждый из трех термов уравнения (2) могут быть преобразованы как:
Подстановка приведенных выше трех термов в уравнение (2) дает,

R' может быть преобразовано и подставлено в (3):

Таким образом, ускорение изменения расстояния R" становится
Из уравнения (5) может быть выражено R

Для получения R из уравнения (6) необходимы как Sinθ, так и R". sinθ выражается через (1-cos2θ), то есть cosθ связан с известной величиной, а именно доплеровским сдвигом. R" выводится из скорости изменения доплеровского сдвига, что является еще одной известной величиной. Таким образом, уравнения можно переписать с доплеровским сдвигом, обозначенным как f:

Решая уравнение относительно cosθ и используя sin2θ=(1-cos2θ), получаем sin2θ:

Далее уравнение (4) может быть преобразовано следующим образом:

Беря производную от R' по t, получаем R":

f' в уравнении (10) представляет собой df/dt, скорость изменения доплеровского сдвига, что является величиной, которую можно оценить, используя известные способы. Используя уравнения (8) и (10), теперь можно вычислить R из уравнения (6). В системе 100 связи расстояние R вычисляется как для обслуживающего спутника 102, так и для спутника 104 назначения.
Далее вычисленное расстояние R требуется преобразовать в значение оценки смещения ПШ кода, изначально определенное на этапе 906. Для преобразования расстояния R в значение ПШ смещения разница расстояний до первого и второго спутников 102 и 104 делится на скорость света:

Описан пример такой процедуры со ссылками на Фиг. 2, 11 и 12, описывающий процедуру, которой следует пользовательский терминал 110 для определения ПШ смещения, изначально определенного на этапе 906. Во-первых, обрабатывающая схема или элементы (например, специализированная ИС) в пользовательском терминале 110 должна быть выполнена с возможностью выполнения операций, описываемых уравнениями (1)-(11), приведенных выше. Выполненный таким образом, пользовательский терминал 110 способен определять доплеровский сдвиг и скорость изменения доплеровского сдвига спутникового луча В1204, как описывается этапом 1100 по Фиг. 11 и показано на Фиг. 2. Далее пользовательский терминал 110 измеряет доплеровский сдвиг и скорость изменения доплеровского сдвига, связанные со спутниковым лучом В1142, как описывается этапом 1102. С известными доплеровским сдвигом и скоростью изменения доплеровского сдвига, связанными со спутниковым лучом В1142 и В1204, пользовательский терминал 110 может определить расстояние R104 до спутника 104 от пользовательского терминала 110, как описывается этапом 1104. Также пользовательский терминал 110 определяет расстояние R102 до спутника 102 от пользовательского терминала 110, как описывается этапом 1106.
На Фиг. 12, как дается уравнением (10), ПШ смещение спутникового луча В1204 назначения может быть получено из расстояний R104 и R102, определенных выше. Для этого, как описывается этапом 1200, пользовательский терминал 110 определяет разность между R104 и R102 и преобразует эту разность в разность ПШ пилот-сигнала спутникового луча В1204. Таким образом, теперь пользовательский терминал имеет значение оценки ПШ разности, полученное на этапе 1200, и значение определенной ПШ разности, полученное на этапе 906. Пользовательский терминал 110 может теперь сравнить оценку ПШ разности с определенной ПШ разностью, как описывается этапом 1202.
Как описывается этапом 1204, если разность между определенной ПШ разностью и оценкой ПШ разности меньше заранее определенной величины, пользовательский терминал 110 может подтвердить произведенную ранее на этапе 908 идентификацию спутникового луча В1204. В настоящем иллюстративном варианте осуществления заранее определенная величина составляет около 10 мс. Величина, составляющая около 10 мс, вполне соответствует максимальной ожидаемой задержке распространения между спутниками 102 и 104, которая, как известно, составляет около +/- 7,5 мс, как это обсуждалось выше.
С другой стороны, если оценка ПШ разности по времени (смещение) на этапе 1200 превышает заранее определенную величину, как описывается этапом 1206, произведенная ранее идентификация спутникового луча В1204 рассматривается как ошибочная и, следовательно, отбраковывается. Хотя иллюстративный вариант осуществления настоящего изобретения использует корреляционное окно или окно поиска, составляющее примерно 10 мс, для определения, соответствуют ли определенное смещение ПШ кода и оцененное смещение ПШ кода или находятся ли они в заранее определенном временном промежутке по отношению друг к другу, понятно, что в настоящей области техники при необходимости могут использоваться другие размеры окна.
Для определения расстояния предлагается альтернативный способ. Здесь расстояние может быть определено, используя квадратичное приближение:
где G является константой гравитационного взаимодействия, а MЕ является массой Земли.
Данное выражение может быть преобразовано для получения:
где
Информация о расстоянии может быть получена, используя квадратичное выражение уравнения (12), и моделирование показывает, что один из корней всегда положительный, тогда как другой корень всегда отрицательный.
Используя способ, изложенный выше, пользовательский терминал 110 имеет возможность повысить точность идентификации спутниковых лучей назначения, используя способ подтверждения ИД луча, компенсирующий задержки распространения между спутниками. При точной идентификации спутникового луча назначения пользовательский терминал может более надежно получать доступ к системным ресурсам иллюстративной системы 100 связи. Таким образом, настоящее изобретение обеспечивает подтверждение или верификацию для традиционных способов идентификации спутниковых лучей.
Представленное выше описание предпочтительных вариантов осуществления изобретения обеспечивает иллюстрацию и описание, но не должно рассматриваться как ограничение настоящего изобретения до описанных вариантов. Возможны модификации и изменения, совместимые с изложенными выше принципами или полученные при реализации изобретения. Таким образом, объем настоящего изобретения определяется прилагаемой формулой изобретения и ее эквивалентами.


Предлагается система и способ определения ошибок временного смещения в спутниковой системе, основанные на доплеровском сдвиге и скорости изменения доплеровского сдвига. Пользовательский терминал определяет первое и второе временные смещения, соответственно связанные с первым и вторым спутниковыми лучами соответственно от первого и второго спутников. Далее пользовательский терминал определяет доплеровский сдвиг и скорость изменения доплеровского сдвига, связанные с первым и вторым спутниковыми лучами. Временное смещение оценивается по измеренным доплеровскому сдвигу и скорости изменения доплеровского сдвига и затем сравнивается с временным смещением, определяемым самим пользовательским терминалом. Если результат сравнения не соответствует заранее определенному порогу, констатируется ошибка идентификации луча. Достигаемым техническим результатом является обеспечение идентификации спутниковых лучей. 6 н. и 23 з.п. ф-лы, 12 ил., 1 табл.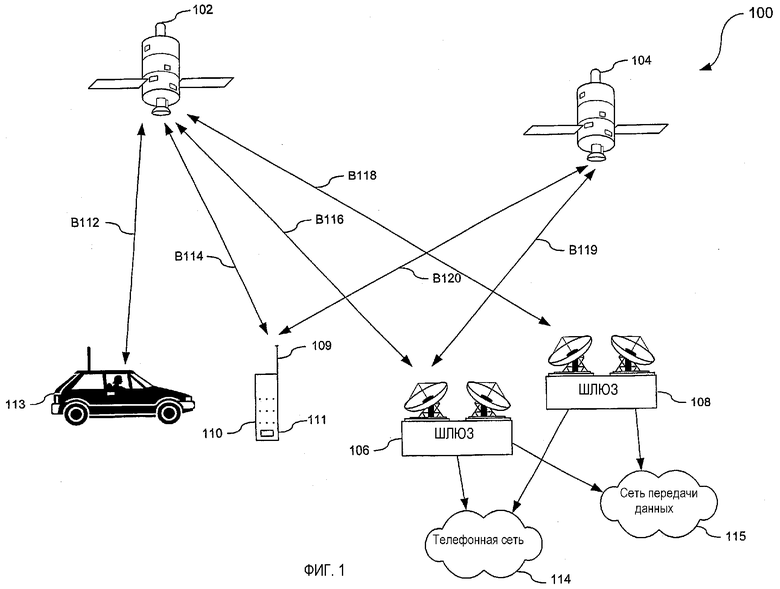
(b) оценку первого расстояния от пользовательского терминала до исходного спутника;
(c) оценку второго расстояния от пользовательского терминала до спутника назначения;
(d) определение ошибки второго временного смещения, основываясь на разности между оценками первого и второго расстояний.

где R" является ускорением изменения расстояния, R' является скоростью изменения расстояния, R является расстоянием от пользовательского терминала до спутника, RE является радиусом Земли, RS является радиусом орбиты спутника, v является вектором скорости, G является константой гравитационного взаимодействия и ME является массой Земли.

где R" является ускорением изменения расстояния, R' является скоростью изменения расстояния, R является расстоянием от пользовательского терминала до спутника, RE является радиусом Земли, RS является радиусом орбиты спутника, v является вектором скорости, G является константой гравитационного взаимодействия и ME является массой Земли.
(i) измерение доплеровских характеристик, связанных с первым и вторым спутниковыми лучами;
(ii) определения расстояний, связанных с первым и вторым спутниками; и
(iii) определение временной разности, основываясь на определенных расстояниях.
(a) прием второго спутникового луча в пользовательском терминале;
(b) определение второго временного смещения, представляющего собой фазовое смещение псевдослучайного шумового (ПШ) кода второго спутникового луча, основываясь на первом временном смещении;
(c) идентификацию второго спутникового луча, основываясь на втором временном смещении;
(d) оценку первого расстояния от пользовательского терминала до обслуживающего спутника;
(e) оценку второго расстояния от пользовательского терминала до спутника назначения;
(f) определение временной разности, основываясь на разности между оценкой первого расстояния и оценкой второго расстояния;
(g) вычисление разности между вторым временным смещением и временной разностью; и
(h) подтверждение идентификации второго спутникового луча, если разность между вторым временным смещением и временной разностью превышает заранее определенную величину.
процессор, связанный с блоком приема и выполненный с возможностью (i) определения первого временного смещения, представляющего собой фазовое смещение псевдослучайного шумового (ПШ) кода, связанное с сигналом первого спутникового луча, причем первое временное смещение является представлением первого идентификатора (ИД) луча первого спутникового луча, (ii) определения второго временного смещения, представляющего собой фазовое смещение ПШ кода, связанное с сигналом второго спутникового луча, причем второе временное смещение определяется, основываясь на первом временном смещении, и является представлением второго ИД луча второго спутникового луча, и (iii) измерения в пользовательском терминале соответствующих доплеровских характеристик, связанных с сигналами первого и второго спутниковых лучей соответственно, для верификации первого и второго ИД лучей;
причем соответствующие доплеровские характеристики используются для определения первого и второго расстояний, соответственно связанных с пользовательским терминалом и первым и вторым спутниками; и причем пользовательский терминал выполнен с возможностью преобразования первого и второго расстояний в третье временное смещение и определения наличия ошибки во втором ИД луча, основываясь на сравнении второго и третьего временных смещений.
процессор, связанный с блоком приема и выполненный с возможностью (i) определения первого временного смещения, представляющего собой фазовое смещение псевдослучайного шумового (ПШ) кода, связанное с сигналом первого передатчика, причем первое временное смещение является представлением первого идентификатора (ИД) передатчика, (ii) определения второго временного смещения, представляющего собой фазовое смещение ПШ кода, связанное с сигналом второго передатчика, причем второе временное смещение является представлением второго ИД передатчика, и (iii) измерения в пользовательском терминале соответствующих доплеровских характеристик, связанных с сигналами первого и второго передатчиков соответственно, для верификации первого и второго ИД передатчиков; причем соответствующие доплеровские характеристики используются для определения первого и второго расстояний, соответственно связанных с пользовательским терминалом и первым и вторым передатчиками; и пользовательский терминал выполнен с возможностью преобразования первого и второго расстояний во временную разность и определения наличия ошибки во втором ИД передатчика, основываясь на сравнении второго временного смещения и временной разности.
(b) определение в пользовательском терминале второго временного смещения, представляющего собой фазовое смещение ПШ кода, связанное со вторым лучом от второго спутника, основываясь на первом временном смещении;
(c) оценку первого расстояния от пользовательского терминала до первого спутника;
(d) оценку второго расстояния от пользовательского терминала до второго спутника; и
(e) определение ошибки второго временного смещения на основе разности между оценками первого и второго расстояний,
при этом, по меньшей мере, один из этапов оценки с) и d) включает в себя определение доплеровских характеристик, связанных с пользовательским терминалом и первым и вторым спутниками, которые включают в себя доплеровскую частоту и скорость изменения доплеровской частоты,
при этом первое и второе расстояния оцениваются из выражения
где R" является ускорением изменения расстояния, R' является скоростью изменения расстояния, R является расстоянием от пользовательского терминала до спутника, RE является радиусом Земли, RS является радиусом орбиты спутника, v является вектором скорости, G является константой гравитационного взаимодействия и ME является массой Земли.
(a) определение в пользовательском терминале первого временного смещения, представляющего собой фазовое смещение псевдослучайного шумового (ПШ) кода, связанное с первым лучом от первого спутника;
(b) определение в пользовательском терминале второго временного смещения, представляющего собой фазовое смещение ПШ кода, связанное со вторым лучом от второго спутника, основываясь на первом временном смещении;
(c) оценку первого расстояния от пользовательского терминала до первого спутника;
(d) оценку второго расстояния от пользовательского терминала до второго спутника; и
(e) определение ошибки второго временного смещения на основе разности между оценками первого и второго расстояний,
при этом этапы оценки первого и второго расстояний содержат соответственно определение (i) доплеровской частоты, связанной с первым и вторым спутниковыми лучами, и (ii) скорости изменения определения доплеровской частоты,
при этом первое и второе расстояния получают из выражения
где R" является ускорением изменения расстояния, R' является скоростью изменения расстояния, R является расстоянием от пользовательского терминала до спутника, RE является радиусом Земли, RS является радиусом орбиты спутника, v является вектором скорости, G является константой гравитационного взаимодействия и ME является массой Земли.
| US 5644572 А, 01.07.1997 | |||
| ПОЛИМЕРНО-БИТУМНОЕ ВЯЖУЩЕЕ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2003 |
|
RU2241724C1 |
| СИСТЕМА УПРАВЛЕНИЯ СРЕДСТВАМИ РАЗНЕСЕННОЙ ПЕРЕДАЧИ СИГНАЛОВ ЧЕРЕЗ СПУТНИКОВЫЕ РЕТРАНСЛЯТОРЫ | 1996 |
|
RU2153226C2 |
| US 6072428 А, 06.06.2000 | |||
| US 5268694 А, 07.12.1993. | |||

