Область техники
Изобретение относится к определению местоположения объектов с использованием искусственных спутников и, более конкретно, к системе и способу определения местоположения пользовательского терминала в спутниковой системе связи с использованием измерений, выполняемых на обоих концах линии связи.
Предшествующий уровень техники
Типичная спутниковая система связи содержит по меньшей мере одну наземную базовую станцию (узел межсетевого сопряжения), по меньшей мере один пользовательский терминал (например, мобильный телефон), а также один или более спутников связи для ретрансляции сигналов связи между узлом межсетевого сопряжения и пользовательским терминалом. Упомянутый узел межсетевого сопряжения обеспечивает каналы связи от пользовательского терминала к другим пользовательским терминалам или системам связи, таким как наземная телефонная система.
Разработаны различные системы связи множественного доступа, предназначенные для передачи информации между большим числом пользователей системы. К этим методам относятся такие методы расширения спектра, как множественный доступ с временным разделением каналов (МДВР), множественный доступ с частотным разделением каналов (МДЧР) и множественный доступ с кодовым разделением каналов (МДКР), основы которых хорошо известны в технике. Использование методов МДКР в системе связи множественного доступа раскрыто в патенте США №4901307 от 13 февраля 1990 на “Систему связи множественного доступа с расширенным спектром, использующую спутниковые или наземные ретрансляторы” и в заявке на патент США №08/368570 от 4 января 1995 на “Способ и устройство для использования полной спектральной передаваемой мощности в системе связи с расширенным спектром для отслеживания фазы и энергии отдельного абонента”, которые переуступлены правопреемнику настоящего изобретения.
В вышеупомянутых патентных документах раскрываются системы связи множественного доступа, в которых большое число в общем случае мобильных или удаленных систем используют пользовательские терминалы для осуществления связи с другими пользователями системы или пользователями подсоединенных систем, таких как коммутируемая телефонная сеть общего пользования (КТСОП). Пользовательские терминалы осуществляют связь через узлы межсетевого сопряжения и спутники с использованием систем связи МДКР с расширенным спектром.
Спутники связи формируют лучи, которые подсвечивают “пятно” или облучаемую область путем направления спутниковых сигналов связи на поверхность Земли. Типовая диаграмма спутникового луча в таком пятне содержит ряд лучей, упорядоченных в предварительно определенной конфигурации рабочей зоны. В типовом случае каждый луч содержит ряд так называемых суб-лучей (также называемых каналами МДКР), перекрывающих всю территориальную область, причем каждый использует различную полосу частот.
В типовой системе связи с расширенным спектром используется набор предварительно выбранных последовательностей псевдослучайного шумового (ПШ) кода, предназначенных для модуляции (т.е. расширения спектра) информационных сигналов в предварительно определенной спектральной полосе перед осуществлением модуляции несущей частоты для передачи в виде сигналов связи. Расширение спектра за счет использования ПШ кода, представляющее собой широко известный из предшествующего уровня техники способ передачи с расширенным спектром, обеспечивает формирование передаваемого сигнала, ширина полосы которого намного больше, чем ширина полосы сигнала данных. В прямой линии связи (т.е. в линии связи, исходящей от узла межсетевого сопряжения и заканчивающейся в пользовательском терминале) используются ПШ коды расширения спектра или двоичные последовательности, обеспечивающие различение сигналов, передаваемых узлом межсетевого сопряжения в различных лучах, и различение сигналов многолучевого распространения. Такие ПШ коды в типовом случае совместно используются всеми сигналами связи в пределах данного суб-луча.
В типовой системе МДКР с расширенным спектром используются канальные коды для обеспечения различения сигналов, предназначенных для конкретных пользовательских терминалов, передаваемых в пределах спутникового луча по прямой линии связи. Т.е. уникальный ортогональный канал обеспечен для каждого пользовательского терминала в прямой линии связи за счет использования уникального канального ортогонального кода. Обычно для реализации канальных кодов используются функции Уолша с типовой длиной порядка 64 элемента кода для наземных систем и 128 элементов кода для спутниковых систем.
Типовые системы связи МДКР с расширенным спектром, такие, как описано в патенте США №4901307, предусматривают использование когерентной модуляции и демодуляции для осуществления связи с пользовательскими терминалами по прямой линии связи. В системах связи, использующих этот метод. в качестве когерентной фазовой опоры используется пилот-сигнал несущей (далее пилот-сигнал). Это означает, что пилот-сигнал, обычно не имеющий модуляции информационным сигналом, передается узлом межсетевого сопряжения для всей зоны обслуживания. Один пилот-сигнал обычно передается каждым узлом межсетевого сопряжения для каждого луча, используемого для каждой частоты. Эти пилот-сигналы совместно используются всеми пользовательскими терминалами, принимающими сигналы от узла межсетевого сопряжения.
Пилот-сигналы используются пользовательскими терминалами для достижения первоначальной синхронизации в системе, а также для обеспечения слежения по времени, частоте и фазе за другими сигналами, передаваемыми узлами межсетевого сопряжения. Фазовая информация, получаемая в результате сопровождения несущей пилот-сигнала, используется в качестве опорной фазы несущей частоты для осуществления когерентной демодуляции других системных сигналов или сигналов трафика. Этот метод обеспечивает возможность множеству сигналов трафика совместно использовать общий пилот-сигнал в качестве опорной фазы, обеспечивая тем самым реализацию более экономичного и эффективного механизма слежения.
Если пользовательский терминал не участвует в сеансе связи (т.е. пользовательский терминал не принимает и не передает сигналы трафика), то узел межсетевого сопряжения может передавать информацию к конкретному пользовательскому терминалу с использованием сигнала, известного как сигнал поискового вызова (пейджинговый сигнал). Например, если вызов должен быть размещен на конкретный мобильный телефон, то узел межсетевого сопряжения уведомляет мобильный телефон с помощью пейджингового сигнала. Педжинговые сигналы также используются для распределения назначений каналов трафика, обеспечения доступа к назначенным каналам и для передачи служебной системной информации.
Пользовательский терминал может отвечать на пейджинговый сигнал путем передачи сигнала доступа или попытки доступа по обратной линии связи (это линия связи, исходящая из пользовательского терминала и завершающаяся в узле межсетевого сопряжения). Сигнал доступа также используется, когда пользовательский терминал инициирует вызов.
Когда необходимо осуществить информационный обмен с пользовательским терминалом, система может потребовать определения положения пользовательского терминала. Необходимость информации о местоположении пользовательского терминала обусловлена рядом причин. Одной из них является то, что система должна выбирать соответствующий узел межсетевого сопряжения для предоставления канала связи. Один из аспектов данной проблемы состоит в распределении линии связи надлежащему провайдеру обслуживания (например, телефонной компании). Провайдер обслуживания в типовом случае назначается конкретной географической территории и обслуживает все вызовы пользователей на этой территории. Если необходима связь с конкретным пользовательским терминалом, то система связи может назначить обслуживание данного вызова провайдеру обслуживания, базирующемуся на территории, где находится данный пользовательский терминал. Чтобы определить соответствующую территорию, системе необходима информация о местоположении пользовательского терминала. Аналогичные проблемы возникают и тогда, когда вызов должен быть назначен провайдерам обслуживания с учетом политических границ или в случае обслуживания, связанного контрактными обязательствами.
Принципиально важным моментом в определении местоположения в спутниковой системе связи является скорость. Если необходимо осуществлять связь с конкретным пользовательским терминалом, то узел межсетевого сопряжения, который выделяется для обслуживания данного пользовательского терминала, должен выбираться с высоким быстродействием. Например, для пользователя мобильного телефона, по всей вероятности, была бы недопустимой задержка более нескольких секунд при размещении вызова. Требования к точности позиционирования в данной ситуации менее важны, чем требования скорости. Ошибка менее 10 км рассматривается как вполне допустимая. В противоположность этому, большинство традиционных способов определения местоположения в спутниковых системах предъявляют повышенные требования к точности по сравнению с требованиями к скорости.
Один из известных подходов использован в системе TRANSIT ВМФ США. В этой системе пользовательский терминал выполняет непрерывные доплеровские измерения сигнала, передаваемого в широковещательном режиме спутником на низкой околоземной орбите. Такие измерения продолжаются в течение нескольких минут. Система обычно требует двух проходов спутников, что приводит к необходимости ожидания в течение более чем 100 минут. Кроме того, так как вычисления местоположения выполняются пользовательским терминалом, спутник должен передавать в широковещательном режиме информацию, относящуюся к его местоположению (также называемую эфемеридами”). Хотя система TRANSIT обеспечивает высокую точность (порядка одного метра), задержка, связанная с измерениями в этой системе, неприемлема для использования в коммерческих спутниковых системах связи.
Другой традиционный подход используется в системах ARGOS и SARSAT (спутниковая система поиска и спасения). При данном подходе пользовательский терминал передает прерывистый сигнал маяка к приемнику на спутнике, который осуществляет измерения частоты сигнала. Если спутник принимает более четырех сигналов маяков от пользовательского терминала, он может обычно определить местоположение пользовательского терминала. Поскольку сигнал маяка прерывистый, то продолжительные доплеровские измерения, такие как выполняемые системой TRANSIT, не реализуются. Кроме того, решение является неоднозначным, обеспечивая возможность получения решения с некоторой вероятностью на каждой стороне подспутниковой области (т.е. линии на земной поверхности, которая находится непосредственно под спутниковой траекторией).
Другой традиционный подход использован в глобальной системе определения местоположения (GPS). В данном методе каждый спутник передает в широковещательном режиме сигнал с временными метками, который включает в себя спутниковые эфемериды. Когда пользовательский терминал принимает сигнал системы GPS, пользовательский терминал измеряет задержку передачи относительно его собственного тактового генератора и определяет псевдодальность до местоположения передающего спутника. Система GPS требует использования трех спутников для двумерного позиционирования и четырех спутников для четырехмерного позиционирования.
Один из недостатков данного метода, основанного на использовании системы GPS, заключается в том, что по меньшей мере три спутника требуются для определения местоположения. Другим недостатком данного метода является то, что ввиду вычислений, выполняемых пользовательским терминалом, спутники системы GPS должны передавать в широковещательном режиме свои эфемериды, а пользовательский терминал должен располагать вычислительными ресурсами для выполнения требуемых вычислений.
Один из недостатков всех вышеописанных способов заключается в том, что пользовательский терминал должен иметь отдельный передатчик или приемник, в дополнение к тому, который требуется для обработки сигналов связи, чтобы использовать указанные способы.
Другой традиционный способ раскрыт в патенте США №5126748 от 30 июня 1992 на “Двухрежимную спутниковую навигационную систему и способ”. В данном способе используются два спутника для активного определения местоположения пользовательского терминала по трем сторонам. Недостатком данного способа является то, что решение является неоднозначным, обеспечивая получение двух возможных местоположений. Дополнительная информация необходима для разрешения указанной неоднозначности.
Таким образом, существует потребность в спутниковой системе определения местоположения, которая обеспечивает однозначное определение местоположения с высоким быстродействием.
Сущность изобретения
Настоящее изобретение предусматривает систему и способ однозначного н с высоким быстродействием определения местоположения пользовательского терминала (например, мобильного телефона) в спутниковой системе связи, такой как система связи, использующая спутники на низких околоземных орбитах. Система включает в себя пользовательский терминал, по меньшей мере два спутника с известным местоположением и известными скоростями и узел межсетевого сопряжения (т.е. наземную базовую станцию) для осуществления связи с пользовательским терминалом через спутники. Способ включает этапы определения набора параметров, которые описывают временные и пространственные соотношения между пользовательским терминалом и спутниками. и вычисления местоположения пользовательского терминала с использованием некоторых или всех параметров, а также известных местоположений и известных скоростей спутников.
Могут быть использованы четыре параметра: дальность, скорость изменения дальности, разность дальностей и разность скоростей изменения дальностей. Параметр “дальность” представляет расстояние между спутником и пользовательским терминалом. Параметр “разность дальностей” представляет разность между (1) расстоянием между пользовательским терминалом и первым спутником и (2) расстоянием между пользовательским терминалом и вторым спутником. Параметр “скорость изменения дальности” представляет относительную радиальную скорость между пользовательским терминалом и спутником. Параметр “разность скоростей изменения дальностей” представляет разность между (1) относительной радиальной скоростью между пользовательским терминалом и первым спутником и (2) относительной радиальной скоростью между пользовательским терминалом и вторым спутником.
В первом варианте осуществления изобретения используются дальность, разность дальностей и разность скоростей изменения дальностей. Во втором варианте осуществления изобретения используются дальность, скорость изменения дальности и разность дальностей. В третьем варианте осуществления изобретения используются все четыре параметра. В предпочтительном варианте осуществления изобретения используется итеративный взвешенный способ наименьших квадратов Гаусса-Ньютона для вычисления местоположения пользовательского терминала на основе используемых параметров и известных местоположений и скоростей спутников.
Одним из преимуществ настоящего изобретения является то, что оно обеспечивает однозначное, характеризуемое высоким быстродействием определение местоположения.
Другим преимуществом настоящего изобретения является то, что оно обеспечивает определение местоположения с высоким быстродействием при использовании только двух спутников.
Еще одним преимуществом настоящего изобретения является то, что оно обеспечивает определение местоположения с высоким быстродействием, не требуя передачи со спутников к пользовательским терминалам информации об их эфемеридах для использования при определении местоположения.
Еще одним преимуществом настоящего изобретения является то, что оно обеспечивает определение местоположения с высоким быстродействием в системе связи, не требуя от пользовательских терминалов определения своего местоположения.
Краткое описание чертежей
Признаки и преимущества настоящего изобретения поясняются в изложенном ниже детальном его описании, иллюстрируемом чертежами, на которых одинаковыми ссылочными позициями обозначены идентичные или функционально сходные элементы. Левая цифра ссылочной позиции указывает номер чертежа, на котором данная ссылочная позиция появилась впервые.
Фиг.1 - представление типовой спутниковой системы связи;
фиг.2 - блок-схема примера осуществления приемопередатчика для использования в пользовательском терминале;
фиг.3 - блок-схема устройства передачи и приема для использования в узле межсетевого сопряжения;
фиг.4 - блок-схема контура временного слежения для использования в пользовательском терминале;
фиг.5 - блок-схема контура слежения по скорости для использования в пользовательском терминале;
фиг.6 - изображение подспутниковых точек для двух спутников и проекции на земную поверхность изоконтуров параметров дальности, разности дальностей и разности скоростей изменения дальностей, относящихся к спутникам;
фиг.7 - иллюстрация случая, когда параметр скорости изменения дальности не может разрешить сингулярность ГСТ (геометрический фактор снижения точности), представленную способом позиционирования, использующим только параметры дальности и разности дальностей;
фиг.8 - изображение подспутниковых точек для двух спутников и проекции на земную поверхность изоконтуров параметров дальности, разности дальностей и скорости изменения дальностей, относящихся к спутникам;
фиг.9А - графическое представление компонентов частоты сигнала, измеренной в пользовательском терминале;
фиг.9В - графическое представление компонентов частоты сигнала, измеренной в узле межсетевого сопряжения;
фиг.10-12 - блок-схемы последовательностей операций согласно предпочтительным вариантам осуществления настоящего изобретения и
фиг.13 - блок-схема, иллюстрирующая компьютерную среду, в которой может быть осуществлено настоящее изобретение.
Детальное описание предпочтительных вариантов осуществления изобретения
1. Введение
Настоящее изобретение относится к системе и способу для однозначного определения местоположения пользовательского терминала в спутниковой системе связи с использованием по меньшей мере двух спутников на низких околоземных орбитах. Как будет понятно для специалистов в данной области техники, принцип настоящего изобретения может быть применен к спутниковым системам, в которых спутники движутся и не на низких околоземных орбитах, если относительное перемещение между спутниками и пользовательским терминалом достаточно для того, чтобы обеспечить измерения скорости изменения дальности, как описано ниже.
Ниже детально описываются предпочтительные варианты осуществления настоящего изобретения. Хотя описываются конкретные этапы, конфигурации и устройства, однако специалистам в данной области техники должно быть ясно, что это сделано только для целей иллюстрации. Для специалиста в соответствующей области техники ясно, что могут быть использованы и другие этапы, другие конфигурации и устройства без изменения сущности и объема изобретения.
Настоящее изобретение будет описано в четырех разделах. Во-первых, будет описана типовая спутниковая система связи. Во-вторых, описываются параметры. используемые в способах позиционирования в системе. В-третьих, описываются собственно способы позиционирования на базе их физических представлений. И. наконец, описано осуществление этих способов позиционирования.
2. Типовая спутниковая система связи
На фиг.1 представлена типовая спутниковая система связи 100. Спутниковая система связи 100 содержит узел межсетевого сопряжения 102. спутники 104А и 104В и пользовательские терминалы 106. Пользовательские терминалы 106 обычно бывают трех типов: стационарные пользовательские терминалы 106А, которые в типовом случае встроены в стационарную конструкцию; мобильные пользовательские терминалы 106В, которые в типовом случае установлены в транспортном средстве, и портативные пользовательские терминалы 106С, которые в типовом случае являются переносными. Узел межсетевого сопряжения 102 осуществляет связь с пользовательскими терминалами 106 через спутники 106А и 106В.
Пример осуществления приемопередатчика 200 для использования в пользовательском терминале 106 показан на фиг.2. Приемопередатчик 200 использует по меньшей мере одну антенну 210 для приема сигналов связи, которые передаются к аналоговому приемнику 214, где они преобразуются с понижением частоты, усиливаются и преобразуются в цифровую форму. Для выполнения одной антенной функций как приема, так и передачи используется дуплексор 212. Однако в некоторых системах используются отдельные антенны, обеспечивающие возможность работы на различных частотах.
Цифровые сигналы связи с выхода аналогового приемника 214 подаются по меньшей мере на один цифровой приемник данных 216А и цифровой поисковый приемник 218. Могут использоваться дополнительные цифровые приемники данных 216B-216N в конфигурации, известной как многоотводный приемник, для обеспечения требуемых уровней разнесенной обработки сигнала, в зависимости от допустимого уровня сложности блоков, как это очевидно для специалистов в данной области техники. Приемник, выполненный в такой конфигурации, называется многоотводным приемником, причем каждый цифровой приемник данных 216 (A-N) называют “отводом”.
Отводы многоотводного приемника используются не только в целях обеспечения разнесения сигнала, но и для приема сигналов от множества спутников. Поэтому пользовательские терминалы, реализующие способ определения местоположения с помощью двух спутников, соответствующий изобретению, должны использовать в каждый данный момент времени по меньшей мере два цифровых приемника данных 216A-216N для приема сигналов от двух спутников. Кроме того, второй поисковый приемник 218 или несколько таких приемников могут использоваться для обеспечения обнаружения сигнала с высоким быстродействием, либо один или несколько приемников могут использоваться совместно для решения этой задачи.
По меньшей мере один управляющий процессор 220 пользовательского терминала электрически связан с цифровыми приемниками данных 216A-216N и с поисковым приемником 218. Управляющий процессор 220 обеспечивает, в числе прочих функций, основную обработку сигнала, управление синхронизацией, мощностью и процедурой переключения каналов связи или координацией и выбором частоты, используемой в качестве несущих сигналов. Другая основная функция управления, часто выполняемая управляющим процессором 220, заключается в селекции или манипуляции псевдошумовыми кодовыми последовательностями или ортогональными функциями, предназначенными для использования при обработке сигналов связи. Обработка сигнала, осуществляемая управляющим процессором 220, может включать определение параметров, используемых в настоящем изобретении. Такие вычисления параметров сигналов, например относительного времени или частоты, могут включать использование дополнительных или отдельных специализированных схем для повышения эффективности или скорости измерений или для улучшения распределения ресурсов обработки, обеспечивающей управление.
Выходы цифровых приемников данных 216A-216N электрически связаны с пользовательскими схемами 222 цифровой обработки сигналов полосы модулирующих частот в составе пользовательского терминала. Пользовательские схемы 222 цифровой обработки сигналов полосы модулирующих частот содержат элементы обработки и представления, используемые для пересылки информации к пользовательскому терминалу и от пользовательского терминала. Это означает, что элементы запоминания сигналов или данных, такие как оперативная или долговременная цифровая память; устройства вода или вывода, такие как дисплейные экраны, громкоговорители, клавишные панели и телефонные трубки; и т.п. образуют составные части пользовательских схем обработки сигналов полосы модулирующих частот, хорошо известных в технике. Если используется обработка с разнесением сигналов, то пользовательские схемы 222 цифровой обработки сигналов полосы модулирующих частот могут включать блок объединения сигналов с разнесением и декодер. Некоторые из этих элементов могут работать при управлении от управляющего процессора 220 или при обмене информацией с ним.
Когда речевой или иной сигнал данных формируется в виде выходного сообщения или сигнала связи, исходящего из пользовательского терминала, то пользовательские схемы 222 цифровой обработки сигналов полосы модулирующих частот используются для приема, запоминания, обработки и иной подготовки необходимых данных для передачи. Пользовательские схемы 222 цифровой обработки сигналов полосы модулирующих частот выдают эти данные на модулятор передачи 226, работающий при управлении от управляющего процессора 220. Выходной сигнал модулятора передачи 226 передается на блок управления мощностью 228, который обеспечивает управление выходной мощностью усилителя передаваемой мощности 230 для передачи выходного сигнала с помощью антенны 210 к узлу межсетевого сопряжения.
Приемопередатчик 200 может также использовать один или более элементов предварительной коррекции 232 и 234. Работа таких элементов предварительной коррекции описана в совместно поданной заявке на патент того же заявителя на “Временную и частотную предварительную коррекцию для систем, использующих негеостационарные спутники” (номер дела патентного поверенного РА338). Предпочтительно, предварительная коррекция производится на выходе цифрового блока управления мощностью 228 на частоте полосы модулирующих частот. Спектральная информация полосы модулирующих частот, включающая в себя настройку по частоте, преобразуется на соответствующую центральную частоту в процессе преобразования с повышением частоты, выполняемого в усилителе передаваемой мощности 230. Предварительная коррекция или настройка частоты выполняется с использованием хорошо известных способов. Например. предварительная коррекция может осуществляться путем поворота фазы комплексного сигнала, что эквивалентно умножению сигнала на множитель еjωt, где ω вычисляется на основе известных спутниковых эфемерид и требуемой канальной частоты. Весьма полезной является обработка сигналов связи с использованием синфазного (I) и квадратурного (Q) каналов. Устройства прямого цифрового синтеза могут быть использованы для генерирования продуктов такого поворота фазы. Как вариант, может использоваться цифровой вычислительный элемент для поворота координат, который использует двоичные операции сдвига. суммирования и вычитания для выполнения последовательности дискретных поворотов, с помощью которой может быть получен требуемый полный поворот. Такие методы и реализующие их аппаратные средства хорошо известны в технике.
В качестве возможного варианта, элемент предварительного кодирования 234 может быть включен в тракт передачи на выходе усилителя 230 передаваемой мощности для настройки частоты исходящего сигнала. Это может быть реализовано с использованием хорошо известных операций, таких как преобразование с повышением и понижением частоты передаваемого сигнала. Однако изменение частоты на выходе аналогового передатчика может оказаться более трудным, так как для получения требуемой формы сигнала часто используется ряд фильтров, и изменение этой последовательности соединения может создать помехи процессу фильтрации. Как вариант, элемент 234 предварительной коррекции может являться частью механизма частотной селекции или управления для каскада (230) аналого-цифрового преобразования и модуляция пользовательского терминала, так что соответствующим образом преобразованная частота используется для преобразования цифрового сигнала на требуемую частоту передачи с помощью одного этапа обработки.
Информация или данные, относящиеся к одному или нескольким измеренным параметрам для принятых сигналов связи, или сигналов одного или нескольких совместно используемых ресурсов, могут передаваться к узлу межсетевого сопряжения с использованием различных способов, известных в технике. Например, информация может передаваться в виде отдельного информационного сигнала или добавляться к другим сообщениям, подготовленным пользовательскими схемами 222 цифровой обработки сигналов полосы модулирующих частот. Как вариант, информация может быть введена в виде предварительно определенных битов управления с помощью модулятора передачи 226 или блока управления 228 передаваемой мощностью при управлении от управляющего процессора 220.
Цифровые приемники данных 216A-N и поисковые приемники 218 содержат элементы корреляционной обработки сигналов для осуществления демодуляции и слежения за конкретными сигналами. Поисковые приемники 218 используются для поиска пилот-сигналов или других мощных сигналов с относительно постоянной характеристикой, в то время как цифровые приемники данных 216A-N используются для слежения за пилот-сигналами или для демодуляции сигналов, связанных с обнаруженными пилот-сигналами. Поэтому выходные сигналы этих блоков могут контролироваться для получения информации, используемой для вычисления параметров, используемых в настоящем изобретении. Информация измерений, осуществленных пользовательским терминалом 106 над принятыми сигналами связи или сигналами совместно используемых ресурсов, может быть передана в узел межсетевого сопряжения с использованием различных методов, известных в технике. Например, информация может передаваться как отдельный сигнал данных, или она может добавляться к другим сообщениям, сформированным пользовательскими схемами 222 цифровой обработки сигналов полосы модулирующих частот. Цифровые приемники данных 216 (A-N) также используют элементы слежения за частотой, которые могут управляться так, чтобы выдавать на управляющий процессор 220 информацию о текущей частоте и времени для демодулируемых сигналов. Это обсуждается ниже со ссылками на фиг.4 и 5.
Управляющий процессор 220 использует такую информацию для определения того, в какой степени принятые сигналы смещены относительно ожидаемой частоты, на основе частоты гетеродина и при преобразовании в одну и ту же полосу частот, как это необходимо. Эта и иная информация, относящаяся к сдвигам частоты, ошибкам и доплеровским сдвигам, может запоминаться в одном или нескольких элементах памяти 236 ошибок и доплеровских сдвигов, если это необходимо. Данная информация может использоваться управляющим процессором 220 для настройки рабочей частоты или может быть передана в узел межсетевого сопряжения с использованием различных сигналов связи.
По меньшей мере один элемент 238 опорного времени используется для генерирования и запоминания хронологической информации, такой как дана и время суток, для поддержки определения положений спутника. Время может запоминаться и обновляться периодически. Время может также периодически выдаваться в узел межсетевого сопряжения. Кроме того, текущее время запоминается каждый раз, когда пользователь переходит в неактивный режим, т.е. когда он выключается. Это значение времени используется совместно с временем включения для определения различных параметров сигналов, зависящих от времени, и изменений местоположения пользовательского терминала.
Кроме того, элементы памяти 240, 242 могут использоваться для хранения конкретной информации о параметрах, что более подробно будет рассмотрено ниже. Например, элемент памяти 240 может хранить данные измерений пользовательского терминала, выполненных в связи с таким параметром, как скорость изменения дальности, например, разность относительных сдвигов частот между двумя приходящими сигналами. Элемент памяти 242 может использоваться для хранения данные измерений пользовательского терминала, выполненных в связи с таким параметром, как разность по дальности, например разность по времени прихода двух сигналов. Это элементы памяти используют структуры и схемы, хорошо известные в технике, и могут быть выполнены как отдельные элементы или как большая объединенная структура, в которой указанная информация хранится таким образом, чтобы иметь возможность ее поиска и извлечения.
Как показано на фиг.2, гетеродин 250 используется в качестве опорного источника для аналогового приемника 214 для осуществления понижающего преобразования приходящего сигнала в полосу частот модулирующих сигналов на требуемую частоту. Оно может быть осуществлено с применением нескольких промежуточных этапов преобразования, если это желательно, до тех пор, пока сигнал не окажется в требуемой полосе частот модулирующих сигналов. Гетеродин 250 также используется в качестве опоры для аналогового передатчика 230 для осуществления повышающего преобразования сигнала из полосы частот модулирующих сигналов на требуемую несущую частоту для передачи по обратной линии связи, а также в качестве частотного стандарта или опоры для схемы тактирования 252. Схема тактирования 252 генерирует тактовые сигналы для различных каскадов или элементов обработки в пользовательском терминале 200, таких как схемы временного слежения, корреляторы в цифровых приемниках 216А-N и 218, модулятор 226 передачи, элемент 238 опорного времени и управляющий процессор 220. Схема тактирования 252 может быть выполнена с возможностью формирования задержек для обеспечения запаздывания или опережения в относительном тактировании синхросигналов или тактовых сигналов, что осуществляется при управлении процессором. Это означает, что временное слежение может регулироваться на предварительно определенную величину. Могут также применяться коды с задержкой или с опережением относительно “нормального” тактирования в типовом случае на один или несколько периодов следования кодовых элементов, чтобы ПШ коды или элементы, образующие эти коды, могли применяться с различным тактированием, если это необходимо.
Возможный вариант осуществления устройства 300 передачи и приема для использования в узле межсетевого сопряжения 102 представлен на фиг.3. Часть узла межсетевого сопряжения 102, представленная на фиг.3, содержит один или несколько аналоговых приемников 314, связанных с антенной 310, предназначенной для приема сигналов связи, которые затем преобразуются с понижением частоты, усиливаются и преобразуются в цифровую форму с использованием различных схем, хорошо известных в технике. В некоторых системах связи могут использоваться множество антенн 310. Преобразованные в цифровую форму сигналы с выхода аналогового приемника 314 подаются на вход по меньшей мере одного модуля 324 цифровых приемников.
Каждый модуль 324 цифровых приемников соответствует элементам обработки сигнала, используемым для управления информационным обменом между узлом межсетевого сопряжения 102 и одним пользовательским терминалом 106, хотя некоторые модификации рассматриваемого варианта известны в технике. Один аналоговый приемник 314 может обеспечивать входные сигналы для нескольких модулей 324 цифровых приемников, а определенное число таких модулей в типовом случае используется в узлах межсетевого сопряжения 102 с учетом всех спутниковых лучей и возможных сигналов режима разнесенного приема, обрабатываемых в любой конкретный момент времени. Каждый модуль 324 цифровых приемников содержит один или несколько цифровых приемников данных 316 и поисковых приемников 318. Поисковый приемник 318 в общем случае осуществляет поиск сигналов, соответствующих необходимым режимам разнесенного приема, иных, чем пилот-сигналы, причем несколько приемников поиска могут использоваться параллельно для повышения скорости поиска. В системе связи множество цифровых приемников данных 316А-316N используются для разнесенного приема сигналов.
Выходные сигналы цифровых приемников данных 316 подаются на устройство, содержащее элементы обработки 322 в полосе частот модулирующих сигналов, хорошо известное в технике и не рассматриваемое более детально. Возможный вариант устройства обработки в полосе частот модулирующих сигналов включает блоки объединения сигналов, принятых с разнесением, и декодеры, предназначенные для объединения сигналов многолучевого распространения в один выходной сигнал для каждого пользователя. Возможный вариант устройства обработки в полосе частот модулирующих сигналов включает также схемы интерфейсов для обеспечения выходных данных, подаваемых в типовом случае на цифровой переключатель или в сеть. Различные другие известные элементы, такие как вокодеры, модемы данных, элементы коммутации цифровых данных и памяти, могут включаться в состав устройства 322 обработки в полосе частот модулирующих сигналов. Эти элементы обеспечивают управление пересылкой сигналов данных на один или несколько модулей передачи 334.
Сигналы, передаваемые к пользовательским терминалам 106, подаются на один или несколько модулей передачи 334. Типовой узел межсетевого сопряжения использует ряд таких модулей передачи 334 для обеспечения одновременного обслуживания множества пользовательских терминалов 106 и одновременно для нескольких спутников и лучей. Число модулей передачи 334, используемых узлом межсетевого сопряжения 102, определяется факторами, хорошо известными в технике, включая сложность системы, число спутников, одновременно находящихся в зоне видимости, пропускную способность для пользователей, степень разнесения при приеме и т.п.
Каждый модуль передачи 334 содержит модулятор передачи 326, который модулирует с расширением спектра передаваемые данные. Выход модулятора 326 связан с цифровым блоком управления 328 мощностью передачи, который осуществляет управление мощностью передачи исходящего цифрового сигнала. Цифровой блок управления 328 мощностью передачи в общем случае применяет минимальный уровень мощности в целях снижения взаимных помех и эффективного распределения ресурсов, но может использовать и соответствующие уровни мощности при необходимости компенсации ослабления в тракте передачи и других характеристик передачи тракта. Генератор 332 ПШ сигнала используется в модуляторе передачи 326 для расширения спектра сигналов. Такой генератор кода может образовывать функциональную часть одного или нескольких управляющих процессоров или элементов памяти, используемых в узле межсетевого сопряжения 102.
Выходной сигнал цифрового блока управления 328 мощностью передачи поступает на сумматор 336, где он суммируется с выходными сигналами других блоков управления мощностью передачи. Эти выходные сигналы представляют собой сигналы, предназначенные для передачи к другим пользовательским терминалам 106 на одной и той же частоте и в пределах одного и того же луча, как выходные сигналы блока управления 328 мощностью передачи. Выходной сигнал сумматора 336 подается на аналоговый передатчик 338 для цифроаналогового преобразования, преобразования на требуемую радиочастотную (РЧ) несущую, последующего усиления, фильтрации и подачи в одну или несколько антенн 340 для передачи к пользовательским терминалам 106. Антенны 310 и 340 могут являться теми же самыми антеннами, в зависимости от сложности и конфигурации системы связи.
По меньшей мере один управляющий процессор 320 узла межсетевого сопряжения электрически связан с модулями 324 приемников, модулями передачи 334 и схемами обработки 322 в полосе частот модулирующих сигналов. Эти блоки могут быть физически отделены один от другого. Управляющий процессор 320 обеспечивает сигналы команд и управляющие сигналы для осуществления таких функций, как обработка сигналов, генерирование синхросигналов, управление мощностью, управление процедурой переключения каналов связи, объединение разнесенных сигналов и сопряжение систем. Кроме того, управляющий процессор 320 распределяет коды ПШ сигналов расширения спектра, ортогональные кодовые последовательности, а также отдельные передатчики и приемники или модули для использования в информационном обмене с пользователями. Кроме того, управляющий процессор 320 может использоваться для вычисления параметров и осуществления способа позиционирования, соответствующего настоящему изобретению.
Управляющий процессор 320 также управляет генерацией пилот-сигнала и его мощностью, синхронизацией, сигналами пейджингового канала и их подачей на блок управления 328 мощностью передачи. Канал пилот-сигнала представляет собой просто сигнал, не модулированный данными, и может использовать повторяющуюся неизменную структуру или постоянную структуру кадра. Т.е. ортогональная функция, используемая для формирования канала пилот-сигнала, в общем случае имеет постоянное значение, такое как все “1” или все “0”, или хорошо известную повторяющуюся структуру чередующихся “1” и “0”.
Хотя управляющий процессор 320 может быть электрически связан непосредственно с элементами модуля, такими как модуль передачи 334 или модуль приема 324, каждый модуль в общем случае содержит специфический для модуля процессор, такой как процессор передачи 330 или процессор приема 321, который управляет элементами данного модуля. Таким образом, в предпочтительном варианте управляющий процессор 320 электрически связан с процессором передачи 330 и с процессором приема 321, как показано на фиг.3, и может управлять работой большого числа модулей и иных ресурсов более эффективно. Процессор передачи 330 управляет генерацией сигнальной мощности для пилот-сигнала, синхросигналов, пейджинговых сигналов, сигналов каналов трафика, а также подачей их на блок управления мощностью 328. Процессор приема 321 управляет поиском, кодами ПШ сигналов расширения спектра для демодуляции и контролем принимаемой мощности. Процессор 321 может использоваться при определении параметров, используемых в данном способе, соответствующем изобретению, или может детектировать и пересылать информацию, принимаемую от пользовательского терминала, связанную с такими параметрами, при этом снижая вычислительную нагрузку управляющего процессора 320.
Для реализации вариантов осуществления настоящего изобретения могут использоваться один или несколько блоков предварительной коррекции или элементов предварительной частотной коррекции 342 и 344. Предпочтительно элемент предварительной коррекции 342 используется для настройки частоты цифрового выходного сигнала цифрового блока управления 328 мощностью на частоту полосы частот модулирующих сигналов. Как в пользовательском терминале, спектральная информация полосы частот модулирующих сигналов, включающая настройку частоты, преобразуется на соответствующую центральную частоту в процессе повышающего преобразования, выполняемого в аналоговом передатчике 338. Предварительная частотная коррекция выполняется с использованием методов, известных в технике, таких как поворот фазы комплексного сигнала, описанный выше, причем угол поворота определяется исходя из известных спутниковых эфемерид и желательной канальной частоты. Как и в пользовательском терминале, могут использоваться другие способы поворота фазы сигнала и соответствующие аппаратные средства без изменения сущности и объема настоящего изобретения.
В дополнение к предварительной частотной коррекции может быть желательным осуществить предварительную временную коррекцию, чтобы изменить относительную синхронизацию сигналов или ПШ кодов. Это выполняется путем настройки генерации и синхронизации кодов или синхронизации параметров других сигналов, когда сигнал генерируется в полосе частот модулирующих сигналов перед выдачей его блоком управления мощностью 328. Например, блок управления 320 может определить, когда генерируются коды, их относительную синхронизацию и наложение на сигналы, а также когда сигналы воздействуют на модулятор передачи 326 и передаются к различным спутникам с помощью блока управления мощностью 328. Однако известные элементы или схемы предварительной частотной коррекции, как в виде отдельных блоков, подобных элементам предварительной коррекции 342, 344, так и в виде составных частей этих блоков, могут использоваться без применения элементов предварительной частотной коррекции или дополнительно к ним.
На фиг.3 элемент предварительной коррекции 342 показан как включенный в тракт передачи перед сумматором 336. Это позволяет осуществить индивидуальное управление каждым сигналом пользовательского терминала. Однако может использоваться единый элемент предварительной коррекции, если предварительная коррекция выполняется после сумматора 336, так как пользовательские терминалы совместно используют один и тот же передающий тракт от узла межсетевого сопряжения до спутника.
В качестве возможного варианта, элемент предварительной коррекции 342 может быть включен в тракт передачи на выходе аналогового передатчика 338 для настройки частоты исходящего сигнала с использованием хорошо известных способов. Однако изменение частоты на выходе аналогового передатчика может быть более трудным и может создавать помехи процедурам фильтрации сигналов. Как вариант, выходная частота аналогового передатчика 338 может настраиваться непосредственно с помощью управляющего процессора 320 для обеспечения сдвинутой выходной частоты, смещенной относительно нормальной центральной частоты.
Величина частотной коррекции, накладываемой на исходящий сигнал, основывается на известном доплеровском сдвиге между узлом межсетевого сопряжения и каждым спутником, через который осуществляется связь. Величина сдвига, требуемого для компенсации доплеровского сдвига спутника, может быть вычислена управляющим процессором 320 с использованием хорошо известных данных орбитального положения спутника. Эти данные могут запоминаться в одном или нескольких запоминающих устройствах 346, например в справочных таблицах или в элементах памяти, и затем извлекаться из них. Эти данные могут быть получены от других источников данных, если это желательно. Элементы памяти 346 могут быть выполнены на различных хорошо известных схемах, таких как запоминающее устройство с произвольной выборкой (ЗУПВ), постоянное запоминающее устройство (ПЗУ), или магнитные элементы памяти. Эта информация используется для реализации доплеровской настройки для каждого спутника, используемого узлом межсетевого сопряжения в конкретный момент времени.
Как показано на фиг.3, блок опорного времени и частоты (БВЧ) 348 обеспечивает сигналы опорной частоты для аналогового приемника 314. Сигнал универсального времени с приемника GPS может использоваться в некоторых приложениях. Он также может использоваться для ряда этапов преобразования частоты. БВЧ 348 также обеспечивает опорный сигнал для аналогового передатчика 338. БВЧ 348 также обеспечивает синхросигналы для других каскадов или элементов обработки в устройстве передачи и приема 300 узла межсетевого сопряжения, таких как корреляторы в цифровых приемниках 316A-N и 318, модулятор передачи 326, управляющий процессор 320. БВЧ 348 также выполняется с возможностью введения задержки или опережения определенной величины в сигналы относительной синхронизации или тактовые сигналы, при управлении от процессора. Возможный вариант выполнения измерений синхронизации иллюстрируется на фиг.4, на которой представлен контур временного слежения 400 для пользовательского терминала. Этот тип контуров временного слежения в уровне техники определяют термином Tau Dither, как это известно в технике. Согласно фиг.4, входящие сигналы связи с аналогового приемника в типовом случае дискретизируются с повышенной частотой дискретизации и затем вводятся в фильтр прореживания 402. Фильтр прореживания 402 работает с предварительно выбранной частотой и тактированием, чтобы обеспечивать передачу только определенных выборок на последующие каскады приемника.
Прореженные выборки передаются на элемент объединения 404, в типовом случае умножитель, для объединения с соответствующими ПШ кодами расширения спектра, выработанными генератором или источником 406 ПШ кода. для осуществления сжатия сигнала. Сжатый сигнал подается на элемент объединения 408, где он объединяется с соответствующими функциями Wi, выработанными генератором или источником 410, для получения данных. Функции ортогонального кода соответствуют тем, которые использовались для создания каналов сигнала связи. В общем случае для реализации этой процедуры используются пилот-сигналы или пейджинговые сигналы, хотя могут использоваться и другие мощные сигналы. Ортогональный код представляет собой код, используемый для генерации пилот-сигнала или пейджингового сигнала, как хорошо известно в технике. Как вариант, коды расширения спектра или ортогональные коды могут объединяться вместе и затем объединяться с выборками на одном этапе обработки, как известно в технике.
Контур временного слежения может использовать схему “опережения/запаздывания”, как описано в патенте США №4901307, как упоминалось выше. При данном подходе измеряется степень совмещения тактирования приходящих сигналов и цифровых приемников 216 с использованием выборок входящего потока данных, смещенных относительно номинального времени элемента кода. Это смещение составляет плюс или минус половину периода следования элементов ПШ кода и является соответственно запаздывающим и опережающим.
Если тактирование указанных данных с положительным или отрицательным сдвигом отличается от тактирования пиков номинального сжатого приходящего сигнала симметричным образом, то разность между значениями выборок с запаздыванием и с опережением равна нулю. Это означает, что значение, полученное путем формирования разности между запаздывающим и опережающим сигналами, равно нулю, если смещение на половину элемента кода центрировано относительно “своевременного” тактирования принимаемого сигнала. Если относительное тактирование, используемое приемниками 216, не отслеживает точно тактирование принимаемого сигнала, а является опережающим относительно данных приходящего сигнала, то разность запаздывающей и опережающей выборок формирует корректирующий сигнал, который имеет положительное значение. С другой стороны, когда тактирование сигнала запаздывает, то разность запаздывающей и опережающей выборок формирует корректирующий сигнал, который имеет отрицательное значение. Очевидно, что при желании можно использовать инверсное или иное соотношение.
Для реализации данного способа выходной сигнал прореживающего фильтра управляется так, чтобы появиться на половину элемента кода раньше, чем номинальное значение, используемое для демодуляции сигналов. Затем выходной сигнал фильтра прореживания сжимается и декодируется, и полученные в результате данные накапливаются в течение предварительно выбранного интервала (в типовом случае в течение периода символа) в накопителе 414. Накопленные символьные данные обеспечивают значения энергии символьного сигнала, которые возводятся в квадрат в элементе 416 возведения в квадрат, чтобы получить неотрицательное значение для “опережающего” сигнала.
Другой набор выборок накапливается и суммируется или интегрируется в течение последующего предварительно выбранного периода с использованием накопителя 414. Однако в течение этого периода набор элементов задержки 412 используется для задержки подачи ПШ и ортогональных кодов на один период следования элементов кода. Это имеет тот же эффект, что и изменение тактирования выборок или прореживание, с формированием в результате “запаздывающей” копии сжатых и декодированных данных. Эти сжатые и декодированные данные накапливаются на предварительно выбранном периоде времени в накопителе 414. При необходимости могут использоваться дополнительные элементы и устройства хранения. Накопленные символьные данные возводятся в квадрат в элементе 416 возведения в квадрат. Полученные в результате квадратичные опережающее и запаздывающее значения вычитаются друг из друга или сравниваются для получения разности опережающего-запаздывающего тактирования в элементе 418. Эта разность фильтруется с использованием фильтра 420 тактирования для выработки сигнала 422 опережения-запаздывания. Контур временного слежения продолжает осуществлять чередование между использованием незадержанного и задержанного кодов для формирования опережающего и запаздывающего символов, которые используются для обновления или генерации значений сигнала 422 опережения-запаздывания. Это продолжается до тех пор, пока тактирование приемника не будет установлено в исходное состояние, такое, которое соответствует переводу приемника в неактивное состояние или в состояние слежения за новым сигналом, что ясно для специалиста в данной области техники.
Начальное и текущее управления тактированием для процесса прореживания и задержки кодов обеспечиваются такими схемами, как схема 424 управления тактированием. Схема 424 управления тактированием определяет тактирование выборки с фильтра прореживания 402. В то же время расширение спектра с помощью ПШ кода и генерация ортогонального кода управляются сигналами со схемы 424 управления тактированием. Такое тактирование иногда называют включением ПШ сигнала, поскольку оно задействует применение кодов. Может также использоваться сигнал инициализации или сигнал периода синхронизации. Тактирование, выбранное с помощью схемы 424 управления тактированием. настраивается сигналом опережения/запаздывания 422 в ответ на выходной сигнал замкнутого контура тактирования. В общем случае тактирование опережает на интервал времени, равный доле периода элемента кода, например, на 1/8 длительности элемента кода, если применяется дискретизация с повышенной в 8 раз частотой, для получения входного сигнала перед прореживанием. Использование такого тактирования и механизма опережения/запаздывания хорошо известно в технике.
Величина, на которую каждый отвод цифрового приемника настраивает свое тактирование для синхронизации или совмещения с входным сигналом, используется для определения относительных задержек времени прихода сигнала. Это легко выполняется путем слежения за полным значением изменения времени (опережения/запаздывания), используемым замкнутым контуром 400. Накопитель 426 может быть использован для накопления и суммирования каждого из сигналов опережения/запаздывания или команд на предварительно выбранном интервале времени. Это дает полную или суммарную величину изменения, необходимого для совмещения тактирования приходящего сигнала и приемника. Это представляет смешение сигнала от локального пользовательского терминала или тактирование приемника. Если тактирование пользовательского терминала относительно близко к тактированию узла межсетевого сопряжения или синхронизировано с ним, то это может обеспечить меру задержки, испытываемой сигналом при его распространении между узлом межсетевого сопряжения и пользовательским терминалом, что позволяет вычислить дальность. К сожалению, многие факторы, такие как неточность или дрейф частоты гетеродина, препятствуют таким непосредственным вычислениям.
Однако настройки тактирования от двух цифровых приемников 216 могут быть использованы для получения значения разности относительного времени прихода сигналов. Здесь каждый цифровой приемник принимает сигнал от спутника 104А или 104В, и определение настроек тактирования требует отслеживания сигнала. Настройка тактирования может быть выдана либо непосредственно на управляющий процессор или на специализированный вычислительный элемент, где формируется разность между указанными двумя значениями. Эта разность показывает относительную разность по времени прихода двух сигналов в пользовательский терминал, и полученное значение может быть передано в узел межсетевого сопряжения.
Как упомянуто выше, эти данные могут быть переданы в узел межсетевого сопряжения как часть других сообщений или как специальные сигналы, содержащие информацию о времени. Данные могут быть запомнены в переходных элементах памяти для последующей пересылки и использования. Информация может также выдаваться или запоминаться с некоторыми “временными метками”, отражающими время ее получения, так что узел межсетевого сопряжения имеет точное временное соотношение для данных и имеет возможность более точно определить местоположение пользовательского терминала. Однако точность, желательная в системах связи, как упоминалось выше, не является очень жестким требованием. Если информация передается в пределах короткого интервала времени после ее получения, то временная метка не имеет особой пользы. В общем случае данные передаются в пределах нескольких кадров данных от момента их измерения, и если имеются проблемы с пересылкой, то данные генерируются вновь перед пересылкой, поэтому устаревают не более чем на несколько кадров. Однако использование временной метки обеспечивает большую гибкость в передаче данных и возможность повторной пересылки сигналов или наборов сигналов независимо от реального времени. В противном случае система может использовать фиксированные интервалы (слоты) тактирования и запросы передачи сообщений, если временные метки не используются для обеспечения требуемого уровня точности.
Данный процесс аналогичен для сигналов, принимаемых узлом межсетевого сопряжения, за исключением того, что не производится обнаружение пилот-сигнала и ортогональные коды в общем случае связаны с сигналами попыток доступа. Одним из преимуществ для узла межсетевого сопряжения является то, что тактирование может применяться в качестве абсолютного опорного времени. Это означает, что узел межсетевого сопряжения имеет точное системное тактирование, как упоминалось выше, и может с высокой точностью определять разности по времени приложения ПШ или ортогональных кодов относительно своего собственного времени. Это дает возможность узлу межсетевого сопряжения определять точные значения времен передачи или расстояний исходя из состояния ПШ кодов, используемых для каждого приемника или отвода. Эти времена передачи или расстояния могут использоваться для определения параметров дальности или скорости изменения дальности в соответствии с настоящим изобретением. Поэтому информация для каждого отвода может обрабатываться отдельно и не требует объединения с использованием элемента 428, как рассматривалось выше.
Возможный вариант осуществления измерений частоты иллюстрируется на фиг.5, где представлен контур 500 слежения за частотой, предназначенный для использования в пользовательском терминале. Эти измерения частоты могут использоваться при определении скорости измерения дальности и разности скоростей измерения дальностей в соответствии с настоящим изобретением. Как показано на фиг.5, сигналы связи с аналогового приемника подаются на блок поворота 502. Блок поворота 502 работает при предварительно выбранной, но настраиваемой фазе для исключения ошибок по частоте или смещений в цифровых выборках, поступающих с аналогового приемника на цифровой приемник или отвод.
При использовании сигналов типа МДКР выборки могут передаваться на один или несколько элементов объединения 504, в типовом случае умножитель, для объединения с соответствующими ПШ кодами расширения спектра, выдаваемыми одним или несколькими генераторами или источниками 506, для получения данных. Такие ПШ коды расширения спектра и ортогональные коды могут комбинироваться с сигналом либо отдельно, либо совместно на одном этапе. Если используются каналы трафика для настройки частоты, то элемент быстрого преобразования Адамара (БПА) может быть использован вместо блока объединения 504 и генератора кода 506. Данный способ раскрыт в заявке на патент США №08/625431 на “Слежение за частотой для модуляции ортогональными функциями Уолша”, переуступленной правопреемнику настоящего изобретения.
Сигналы с поворотом фазы, сжатые и декодированные, накапливаются на интервале символа в накопителе 514 для получения символа данных, и результаты выдаются на элемент генерации перекрестного произведения векторов или генератор 518. В то же время каждый символ выдается на элемент задержки 516 на время одного символа, который вводит задержку на один период символа перед передачей символа на генератор 518 перекрестного произведения.
Генератор 518 перекрестного произведения формирует перекрестное произведение векторов между данным символом и предыдущим символом для определения изменения по фазе между символами. Это обеспечивает меру ошибки в повороте фазы, введенном во входной сигнал. Выходной сигнал генератора 518 перекрестного произведения выдается в качестве оценки ошибки частоты или коэффициента настройки на блок поворота 502 фазы и генератор 506 кода.
Управление тактировнием для сжатия и декодирования обеспечивается схемами, такими как схема управления 524 тактированием, как упоминалось выше. Такое тактирование может быть обеспечено в виде выходного сигнала контура тактирования, как описано выше.
Величина, на которую каждый отвод или цифровой приемник настраивает свою фазу, чтобы обеспечить совмещение с входным сигналом, используется для определения относительных смещений частоты приходящих сигналов. Т.е. величина, на которую фаза блока поворота фазы должна быть настроена, чтобы устранить остаточную ошибку в настройке сигнала, указывает величину, на которую частота пришедшего сигнала смещена относительно ожидаемой или локальной опорной частоты для пользовательского терминала.
Поскольку система связи работает в пределах фиксированных наборов полос частот для сигналов связи, в приемниках известны центральные или номинальные несущие частоты, которые должны использоваться. Однако в результате доплеровских сдвигов и иных эффектов, которые могут быть минимальными, приходящий сигнал не будет иметь точно ожидаемую центральную частоту. Настройки, описанные выше, определяют смещение, которое может быть использовано для определения доплеровских сдвигов и действительной частоты приходящего сигнала.
Это легко выполняется путем слежения за полной величиной изменения, реализуемого контуром 500 слежения за частотой. Накопитель 522 может использоваться для накопления изменений фазы из оценок ошибок, сигналов или команд на предварительно выбранном интервале. Это дает полную или результирующую величину изменения, требуемого для совмещения частот приходящего сигнала и приемника, и представляет смещение частоты сигнала относительно локального пользовательского терминала или частоты приемника, преобразованной в соответствующую полосу частот.
Как упоминалось выше, эти данные могут передаваться в узел межсетевого сопряжения в виде части других сообщений или как специальные сигналы, содержащие информацию о частоте. Данные могут запоминаться в переходной памяти для последующей пересылки и могут также снабжаться некоторой временной меткой. Однако это в общем случае не требуется, поскольку данные пересылаются в течение нескольких кадров данных от момента их измерения и могут регенерироваться при необходимости. В противном случае система может использовать фиксированные интервалы тактирования и запросы передачи сообщений, если временные метки не используются для обеспечения требуемого уровня точности.
3. Доступные параметры
В предпочтительном варианте осуществления настоящее изобретение использует комбинацию четырех параметров: дальность, скорость изменения дальности, разность дальностей и скорость изменения разности дальностей. Эти параметры описывают пространственные и временные соотношения между пользовательским терминалом 106 и спутниками 104А и 104В. Эти параметры, их измерения и применения описаны ниже.
На фиг.6, 7 и 8 представлены проекции на поверхность Земли изоконтуров, представляющих эти параметры. Изоконтур параметра представляет собой кривую. соединяющую все точки, имеющие одно и то же значение параметра. На фиг.6 и 7 представлены подспутниковые точки 614А и 614В двух спутников 104А и 104В соответственно (т.е. точки на поверхности Земли, находящиеся непосредственно под спутниками) и проекция на поверхность Земли изоконтуров дальности, разности дальностей и скорости изменения разности дальностей, относящихся к спутникам 104А и 104В. Две оси - ось х 602А и ось у 602В, отградуированные в тысячах километров, представлены для иллюстрации примерного масштаба. На фиг.8 представлены подспутниковые точки 614А и 614В двух спутников 104А и 104В соответственно и проекция на поверхность Земли изоконтуров дальности, разности дальностей и скорости изменения разности дальностей, относящихся к спутникам 104А и 104В.
Дальность
Параметр дальность представляет расстояние между спутником и пользовательским терминалом. В предпочтительном варианте осуществления дальность представляет собой расстояние R между спутником 104 к пользовательским терминалом 106. Проекция изо-R-контура на поверхность Земли описывает круг, центр которого находится под соответствующим спутником, как показано штрихпунктирными линиями 604 на фиг.6. В предпочтительном варианте осуществления расстояние R определяют путем измерения задержки двустороннего распространения (ЗДР) сигнала, переданного от спутника 104 к пользовательскому терминалу 106 и обратно к тому же самому спутнику 104. Затем R получают путем деления ЗДР на 2 для получения задержки одностороннего распространения и умножения результата на скорость света, представляющую скорость распространения сигнала. В альтернативном варианте ЗДР используется в качестве параметра дальности.
В предпочтительном варианте осуществления настоящего изобретения ЗДР измеряется следующим образом. Во-первых, сигнал, содержащий известную ПШ последовательность или код расширения спектра, передается узлом межсетевого сопряжения 102. Сигнал ретранслируется к пользовательскому терминалу 106 спутником 104. Пользовательский терминал 106 переизлучает сигнал либо непосредственно, либо с известной задержкой. Переизлученный сигнал ретранслируется назад к узлу межсетевого сопряжения 102 тем же самым спутником 104. Узел межсетевого сопряжения 102 затем сравнивает состояние ПШ последовательности в принятом сигнале с состоянием локальной ПШ последовательности. Различие в этих состояниях затем используется для определения полной задержки двустороннего распространения, которая включает в себя известные задержки между узлом межсетевого сопряжения 102 и спутником 104. Эти задержки известны, так как расстояние между спутниками 104 и узлом межсетевого сопряжения 102 поддерживается узлом межсетевого сопряжения 102, как известно в технике. Вычитанием этих известных задержек из полной задержки двустороннего распространения можно получить значение ЗДР. Используя известные спутниковые эфемериды, известные задержки между узлом межсетевого сопряжения 102 и спутником 104 можно вычислить различными способами, хорошо известными в технике.
В альтернативном варианте осуществления R получают путем измерения “гибридной” задержки двустороннего распространения сигнала, переданного от спутника 104А к пользовательскому терминалу 106 и обратно к второму спутнику 104В. В данном варианте осуществления, однако, задержка одностороннего распространения сигнала не может быть просто определена путем деления на 2 “гибридной” задержки двустороннего распространения сигнала. Поскольку в измерениях участвуют два спутника, то требуется некоторая информация об их относительном положении. В предпочтительном варианте осуществления настоящего изобретения эта информация определяется из параметра, определенного как разность дальностей, рассмотренного ниже. Для специалиста в данной области техники должно быть очевидно, что эту информацию можно получить и из других измерений и других параметров. После нахождения задержки одностороннего распространения сигнала для спутника 104 расстояние R определяется умножением задержки одностороннего распространения сигнала на скорость света.
В предпочтительном варианте осуществления настоящего изобретения гибридная задержка двустороннего распространения сигнала измеряется следующим образом. Во-первых, сигнал, содержащий используемую ПШ последовательность, передается узлом межсетевого сопряжения 102. Сигнал ретранслируется к пользовательскому терминалу 106 первым спутником 104А. Пользовательский терминал 106 переизлучает этот сигнал либо немедленно, либо с известной задержкой. Переизлученный сигнал ретранслируется обратно к узлу межсетевого сопряжения 102 вторым спутником 104В. Затем узел межсетевого сопряжения 102 сравнивает состояние ПШ последовательности в принятом сигнале с состоянием локальной ПШ последовательности. Различие в состояниях затем используется для определения полной гибридной задержки двустороннего распространения сигнала на основе известной частоты следования элементов кода. Вычитание известных задержек между узлом межсетевого сопряжения 102 и первым спутником 104А и между узлом межсетевого сопряжения 102 и вторым спутником 104В из полной гибридной задержки двустороннего распространения сигнала позволяет получить гибридную задержку двустороннего распространения сигнала.
Для специалистов в данной области техники должно быть ясно, что для получения R можно использовать иные способы без изменения сущности и объема настоящего изобретения.
В предпочтительном варианте осуществления настоящего изобретения задержка двустороннего распространения сигнала может измеряться как в процессе вызова, так и при установлении соединения вызова. Если измерение производится при установлении соединения вызова, то измеренный сигнал обычно передается от узла межсетевого сопряжения 102 к пользовательскому терминалу 106 в виде составной части пейджингового сигнала и ретранслируется от пользовательского терминала 106 к узлу межсетевого сопряжения 102 в виде сигнала доступа - Если измерение производится в процессе вызова, то измеренный сигнал обычно передается от узла межсетевого сопряжения 102 к пользовательскому терминалу 106 и обратно в виде составной части сигналов трафика. Для специалиста в данной области техники ясно, что измеренный сигнал может быть сигналом другого типа или может быть введен в состав других сигналов, если это необходимо, без изменения сущности и объема настоящего изобретения.
Разность дальностей
Параметр, определяемый как разность дальностей, представляет расстояния между пользовательским терминалом 106 и двумя спутниками 104А и 104В. В предпочтительном варианте осуществления настоящего изобретения разность дальностей представляет собой разность dR между (1) расстоянием между конкретным пользовательским терминалом 106 и первым спутником 104А и (2) расстоянием между конкретным пользовательским терминалом 106 и вторым спутником 104В. Проекция изо-dR-контуров на поверхность Земли описывает набор гипербол, как изображено пунктирными линиями 606 на фиг.6, причем dR=0 представляет собой контур в виде прямой линии. В предпочтительном варианте осуществления настоящего изобретения разность дальностей dR определяется следующим образом. Во-первых, узел межсетевого сопряжения 102 передает два сигнала. Первый сигнал передается через первый спутник 104А к пользовательскому терминалу 106, а второй сигнал передается через второй спутник 104В к пользовательскому терминалу 106. В предпочтительном варианте осуществления настоящего изобретения первый и второй сигналы предварительно скорректированы по времени, как описано выше со ссылками на фиг.3, в узле межсетевого сопряжения 102, так что они переизлучаются первым и вторым спутниками 104А и 104В по существу одновременно.
Во-вторых, пользовательский терминал 106 определяет разность задержек между (1) временем, в которое пользовательский терминал 106 принял сигнал от первого спутника и (2) временем, в которое пользовательский терминал 106 принял сигнал от второго спутника. Эта разность задержек далее упоминается как Δ t. В-третьих, пользовательский терминал 106 передает сообщение о Δ t к узлу межсетевого сопряжения 102. Наконец, узел межсетевого сопряжения 102 определяет dR из Δ t. Для специалистов в данной области техники должно быть ясно, что для получения dR можно использовать иные способы без изменения сущности и объема настоящего изобретения.
В альтернативном варианте осуществления настоящего изобретения Δ t используется в виде параметра, определяемого как разность дальностей.
В предпочтительном варианте осуществления настоящего изобретения первый и второй сигналы представляют собой пилот-сигналы. Для специалиста в данной области техники ясно, что может быть использован любой другой сигнал без изменения сущности и объема настоящего изобретения.
В предпочтительном варианте осуществления настоящего изобретения первый и второй сигналы предварительно корректируются, как пояснено выше со ссылками на фиг.3, в узле межсетевого сопряжения 102 перед передачей для обеспечения синхронизации ПШ кодов сигналов (включая соответствующие сдвиги ПШ кодов для суб-лучей), когда они переизлучаются спутниками 104А и 104В, причем пользовательский терминал 106 определяет Δ t путем сравнения состояний ПШ кодов в двух принятых сигналах. В альтернативном варианте осуществления настоящего изобретения первый и второй сигналы предварительно не корректируются по времени, но влияние разности по времени переизлучения между первым и вторым сигналами исключается в узле межсетевого сопряжения 102 после приема сигналов. Для специалиста в данной области техники ясно, что могут быть использованы другие способы предварительной коррекции для компенсации разности в длинах путей между узлом межсетевого сопряжения 102 и спутниками 104А и 104В.
Скорость изменения дальности
Параметр, определяемый как скорость изменения дальности, представляет относительную радиальную скорость между пользовательским терминалом и спутником. В предпочтительном варианте осуществления настоящего изобретения скорость изменения дальности представляет относительную радиальную скорость  между пользовательским терминалом 106 и спутником 104. В альтернативном варианте осуществления настоящего изобретения скорость изменения дальности представляет доплеровский сдвиг RTDop в сигналах, передаваемых между пользовательским терминалом 106 и спутником 104. Параметр
между пользовательским терминалом 106 и спутником 104. В альтернативном варианте осуществления настоящего изобретения скорость изменения дальности представляет доплеровский сдвиг RTDop в сигналах, передаваемых между пользовательским терминалом 106 и спутником 104. Параметр  может вычисляться путем умножения RTDop на скорость света и делением на центральную несущую частоту. Проекция изо-РТDор-контуров на поверхность Земли описывает набор кривых, подобных гиперболам, симметричных относительно вектора скорости соответствующего спутника, как изображено сплошными линиями 804 на фиг.8. Контур RTDop=0, проходящий через подспутниковую точку 614А спутника 104А, представляет собой прямую линию.
может вычисляться путем умножения RTDop на скорость света и делением на центральную несущую частоту. Проекция изо-РТDор-контуров на поверхность Земли описывает набор кривых, подобных гиперболам, симметричных относительно вектора скорости соответствующего спутника, как изображено сплошными линиями 804 на фиг.8. Контур RTDop=0, проходящий через подспутниковую точку 614А спутника 104А, представляет собой прямую линию.
В предпочтительном варианте осуществления настоящего изобретения R определяется с использованием двух частотных измерений, одно из которых проводится в пользовательском терминале 106, а другое - в узле межсетевого сопряжения 102, следующим образом. Пользовательский терминал 106 измеряет частоту сигнала, принимаемого от узла межсетевого сопряжения 102 через спутник 104, и сообщает об этой частоте в узел межсетевого сопряжения 102. Узел межсетевого сопряжения 102 измеряет частоту сигнала, принимаемого от пользовательского терминала 106 через тот же самый спутник 104. Таким образом, в узле межсетевого сопряжения 102 имеются результаты двух частотных измерений. В предпочтительном варианте частоты измеряются относительно частот гетеродина. Реальная частота затем получается, как описано выше. Данный способ раскрыт в совместно поданной заявке на “Определение частотных сдвигов в системе связи” (номер дела патентного поверенного РА300) того же заявителя.
Эти измерения могут быть представлены двумя уравнениями с двумя неизвестными: относительной радиальной скоростью  и нормированным сдвигом foff/f0 гетеродина пользовательского терминала. Эта пара уравнений может быть решена относительно указанных неизвестных
и нормированным сдвигом foff/f0 гетеродина пользовательского терминала. Эта пара уравнений может быть решена относительно указанных неизвестных  и foff/f0, что дает результаты измерений, полезные и в других аспектах операций спутниковой системы связи, как это очевидно для специалистов в данной области техники.
и foff/f0, что дает результаты измерений, полезные и в других аспектах операций спутниковой системы связи, как это очевидно для специалистов в данной области техники.
Вывод этих двух уравнений представлен графически на фиг.9А и 9В. На фиг.9А графически представлены компоненты частоты, измеренной в пользовательском терминале 106. На фиг.9В графически представлены компоненты частоты, измеренной в узле межсетевого сопряжения 102.
 - относительная радиальная скорость между спутником 104 и пользовательским терминалом 106
- относительная радиальная скорость между спутником 104 и пользовательским терминалом 106
с - скорость распространения (скорость света)
fF - номинальная частота прямой линии связи
fR - номинальная частота обратной линии связи
f0 - номинальная частота гетеродина пользовательского терминала 106
foff - смещение частоты гетеродина пользовательского терминала 106
foff/f0 - нормированное смещение частоты гетеродина пользовательского терминала 106
В соответствии с фиг.9А частота, измеренная в пользовательском терминале 106, определяется следующим образом:
В соответствии с фиг.9В частота, измеренная в узле межсетевого сопряжения 102, определяется следующим образом:
Путем суммирования и вычитания (1) и (2) получим частотное смещение и относительную радиальную скорость в следующем виде:


Для специалиста в данной области техники ясно, что могут быть использованы другие способы получения  без изменения сущности и объема изобретения.
без изменения сущности и объема изобретения.
В альтернативном варианте осуществления  получают гибридным способом с использованием двух спутников 104А и 104В. В этом варианте пользовательский терминал 106 измеряет частоту сигнала, принимаемого от узла межсетевого сопряжения 102 через первый спутник 104А, и передает сообщение об этой частоте в узел межсетевого сопряжения 102. Узел межсетевого сопряжения 102 измеряет частоту сигнала, принятого от пользовательского терминала 106 через второй спутник 104В. Таким образом, в узле межсетевого сопряжения 102 имеется два результата измерений частоты и, следовательно, имеются два уравнения, которые необходимо решить. Однако в этом варианте осуществления имеется три неизвестных: относительная радиальная скорость первого спутника 104А, относительная радиальная скорость второго спутника 104В и нормированное смещение гетеродина toff/f0. Таким образом, для решения системы уравнений относительно
получают гибридным способом с использованием двух спутников 104А и 104В. В этом варианте пользовательский терминал 106 измеряет частоту сигнала, принимаемого от узла межсетевого сопряжения 102 через первый спутник 104А, и передает сообщение об этой частоте в узел межсетевого сопряжения 102. Узел межсетевого сопряжения 102 измеряет частоту сигнала, принятого от пользовательского терминала 106 через второй спутник 104В. Таким образом, в узле межсетевого сопряжения 102 имеется два результата измерений частоты и, следовательно, имеются два уравнения, которые необходимо решить. Однако в этом варианте осуществления имеется три неизвестных: относительная радиальная скорость первого спутника 104А, относительная радиальная скорость второго спутника 104В и нормированное смещение гетеродина toff/f0. Таким образом, для решения системы уравнений относительно  необходимо больше информации. В предпочтительном варианте осуществления изобретения эта информация может быть получена за счет параметра, определенного как разность скоростей изменения дальностей. Для специалиста в данной области техники должно быть ясно, что эту информацию можно получить также с помощью других параметров и измерений. Таким образом, данный вариант обеспечивает работу в соответствии с изобретением даже в том случае, когда один и тот же спутник 104 не может быть использован для сигналов прямой и обратной линий связи. Эта ситуация может иметь место, например, вследствие внезапной блокировки, ухудшения качества сигнала и т.п.
необходимо больше информации. В предпочтительном варианте осуществления изобретения эта информация может быть получена за счет параметра, определенного как разность скоростей изменения дальностей. Для специалиста в данной области техники должно быть ясно, что эту информацию можно получить также с помощью других параметров и измерений. Таким образом, данный вариант обеспечивает работу в соответствии с изобретением даже в том случае, когда один и тот же спутник 104 не может быть использован для сигналов прямой и обратной линий связи. Эта ситуация может иметь место, например, вследствие внезапной блокировки, ухудшения качества сигнала и т.п.
В предпочтительном варианте осуществления изобретения измерения частоты могут производиться как в процессе вызова, так и при установлении соединения вызова. Если измерение производится при установлении соединения вызова, то сигнал, измеренный в пользовательском терминале 106, является пенджинговым сигналом, а сигнал, измеренный в узле межсетевого сопряжения 102, является сигналом доступа. Если измерение производится в процессе вызова, то сигналы, измеренные в пользовательском терминале 106 и в узле межсетевого сопряжения 102, являются сигналами графика. Для специалиста в данной области техники ясно, что могут использоваться сигналы другого типа без изменения сущности и объема настоящего изобретения.
Разность скоростей изменения дальностей
Разность скоростей изменения дальностей (также известная как разность доплеровских сдвигов) представляет собой параметр, описываемый разностью между (1) скоростью изменения дальности между конкретным пользовательским терминалом 106 и первым спутником 104А и (2) скоростью изменения дальности между этим пользовательским терминалом 106 и вторым спутником 104В. В предпочтительном варианте осуществления разность скоростей изменения дальностей представляет собой разность  между (1) относительной радиальной скоростью между конкретным пользовательским терминалом 106 и первым спутником 104А и (2) относительной радиальной скоростью между этим пользовательским терминалом 106 и вторым спутником 104В.
между (1) относительной радиальной скоростью между конкретным пользовательским терминалом 106 и первым спутником 104А и (2) относительной радиальной скоростью между этим пользовательским терминалом 106 и вторым спутником 104В.
В альтернативном варианте осуществления настоящего изобретения разность скоростей изменения дальностей представляет собой разность Δ f, измеренную в пользовательском терминале 106, между частотой сигнала, принятого от узла межсетевого сопряжения 102 через первый спутник 104А, и частотой сигнала, принятого от узла межсетевого сопряжения 102 через второй спутник 104В. Разность  связана с разностью Δ f следующим образом:
связана с разностью Δ f следующим образом:  можно получить путем умножения Δ f на скорость света и деления на центральную несущую частоту.
можно получить путем умножения Δ f на скорость света и деления на центральную несущую частоту.
Проекция изо-Δ f-контуров на поверхность Земли описывает набор кривых, как изображено сплошными линиями 608 на фиг.6.
В предпочтительном варианте осуществления настоящего изобретения ДК определяется следующим образом. Во-первых, узел межсетевого сопряжения 102 передает два сигнала. Первый сигнал передается через первый спутник 104А к пользовательскому терминалу 106, а второй сигнал передается через второй спутник 104В к пользовательскому терминалу 106. В предпочтительном варианте осуществления настоящего изобретения частоты первого и второго сигналов предварительно скорректированы в узле межсетевого сопряжения 102, так что они переизлучаются первым и вторым спутниками 104А и 104В по существу на одной и той же частоте.
Во-вторых, пользовательский терминал 106 определяет разность между (1) частотой сигнала, принятого от первого спутника, и (2) частотой сигнала, принятого от второго спутника. Эта разность частот далее упоминается как Δ f. Наконец пользовательский терминал 106 определяет  путем умножения Δ f на скорость света и деления результата на центральную несущую частоту первого и второго сигналов. Для специалистов в данной области техники должно быть ясно, что для получения
путем умножения Δ f на скорость света и деления результата на центральную несущую частоту первого и второго сигналов. Для специалистов в данной области техники должно быть ясно, что для получения  можно использовать иные способы без изменения сущности и объема настоящего изобретения.
можно использовать иные способы без изменения сущности и объема настоящего изобретения.
В предпочтительном варианте осуществления настоящего изобретения первый сигнал предварительно скорректирован в узле межсетевого сопряжения 102 перед передачей путем настройки частоты сигнала для компенсации доплеровского сдвига, вызванного известным относительным движением между первым спутником 104А и узлом межсетевого сопряжения 102, а второй сигнал предварительно корректируется аналогичным образом. В альтернативном варианте ни один из сигналов не корректируется по частоте. Специалисту в данной области техники должно быть ясно, что другие способы коррекции могут быть использованы для компенсации движения спутников 104А и 104В.
В предпочтительном варианте осуществления настоящего изобретения первый и второй сигналы представляют собой пилот-сигналы. Для специалиста в данной области техники ясно, что может быть использован любой другой сигнал без изменения сущности и объема настоящего изобретения.
4. Способы позиционирования
Параметры, описанные выше, могут использоваться по меньшей мере в трех различных комбинациях для определения местоположения пользовательского терминала 106. Эти три метода позиционирования описаны ниже. Для пояснения настоящего изобретения физическое представление параметров охарактеризовано контурами постоянных значений параметров (изоконтурами), спроектированными на поверхность Земли.
В первом варианте осуществления настоящего изобретения определение местоположения базируется на дальности, разности дальностей и разности скоростей изменения дальностей. На фиг.6 представлены изоконтура этих параметров. На фиг.6 дальность обозначена R, разность дальностей - dR, разность скоростей изменения дальностей - Δ f. На фиг.6 один изо-R-контур изображен штрихпунктиной линией и обозначен 604; он образует круг, представляющий дальность 2750 км между пользовательским терминалом 106 и спутником 104А. Подспутниковые точки 614 спутников 104 соединены базовой линией 612. Любой изо-R-контур будет пересекать базовую линию 612 под углом 90° . На фиг.6 также представлено семейство изо-dR-контуров, изображенных пунктирными линиями 606. Каждый изо-dR-контур представляет собой гиперболу. соединяющую все точки, имеющие одно и то же значение dR, и пересекает базовую линию 612 под углом 90° . На фиг.6 контура dR проградуированы в тысячах километров. Контур dR=0 является нормальной биссектрисой базовой линии 612. Контур dR=+0,5 расположенный непосредственно справа от контура dR=0, соединяет все точки, для которых дальность до спутника 104А превышает дальность до спутника 104В на 500 км.
Способу позиционирования с использованием только дальности и разности дальностей свойственны две проблемы. Первая проблема связана с неоднозначностью положения. Например, рассмотрим случай, когда R=2750 км и dR=+500 км. Согласно фиг.6, контур R=2750 км пересекает контур dR=+500 км в двух точках - 610А и 610В. Без использования дополнительной информации невозможно определить, находится ли пользовательский терминал в точке 610А или 610В. Следовательно, такое решение является неоднозначным.
Вторая проблема известна как “геометрический фактор снижения точности” (ГСТ). Неоднозначность, связанная с ГСТ, возникает, когда малая ошибка в параметре вызывает большую ошибку в определении положения. Поскольку контуры R и dR пересекают базовую линию 612 под углом 90° , то они могут быть тангенциальными или почти тангенциальными. Следовательно, малая ошибка в любом из этих параметров может привести к большой ошибке определения местоположения. Без дополнительной информации о местоположении способ позиционирования, основанный на использовании только дальности и разности дальностей, будет приводить к неоднозначности, связанной с ГСТ.
Использование соответствующего третьего параметра может решить обе вышеуказанные проблемы для большинства случаев. Согласно фиг.6, параметр Δ f, характеризующий собой разность скоростей изменения дальности, изображен как семейство кривых, обозначенных позициями 608, показанных сплошными линиями, проградуированными в кГц. Форма кривых Δ f является функцией относительной скорости спутников 104А и 104В. Векторы скоростей спутников 104А и 104В обозначены позициями 616А и 616В и представлены как стрелки, проходящие вдоль траектории. Область максимума Δ f находится вблизи верхнего участка фиг.6, где пересекаются субтрассы спутников 104А и 104В.
Согласно фиг.6, контуры Δ f почти перпендикулярны контурам R и dR. По этой причине параметр Δ f разности скоростей изменения дальностей обеспечивает разрешение неоднозначности позиционирования и устраняет проблему ГСТ. Например, точка 610А лежит на контуре Δ f=20 кГц, в то время как точка 610В лежит примерно на контуре Δ f=84 кГц. Поскольку точки 610А и 610В явно различимы по их значениям Δ f, параметр Δ f разности скоростей изменения дальностей обеспечивает разрешение неоднозначности позиционирования. По той же причине параметр Δ f разности скоростей изменения дальностей обеспечивает решение проблемы ГСТ. Параметр  разности скоростей изменения дальностей может также решить указанные проблемы, как это должно быть ясно для специалиста в данной области техники.
разности скоростей изменения дальностей может также решить указанные проблемы, как это должно быть ясно для специалиста в данной области техники.
На фиг.7 представлен случай, когда параметр разности скоростей изменения дальностей не обеспечивает решение проблемы ГСТ в способе позиционирования с использованием только дальности и разности дальностей. В данном случае вектора скорости (и, тем самым, траектории и субтрассы) одного из двух спутников 104А и 104В, наблюдаемые со стороны пользовательского терминала 106, почти параллельны. Эта геометрия приводит к тому, что контуры Δ f вблизи пользовательского терминала 106 сходятся и проходят почти параллельно контурам R и dR вблизи точки 712 на базовой линии 612. Поскольку все три контура почти параллельны вблизи пользовательского терминала 106, то имеет место сингулярность ГСН. Сингулярность ГСН может быть разрешена путем замены параметра, определяемого через разность скоростей изменения дальностей, на параметр, определяемый через скорость изменения дальностей, как показано ниже.
На фиг.10 представлена блок-схема последовательности операций согласно данному первому варианту осуществления изобретения. Определяются один или несколько параметров дальности, как описано выше и представлено этапом 1002. Определяются один или несколько параметров разности дальностей, как описано выше и представлено этапом 1004. Определяются один или несколько параметров разности скоростей изменения дальностей, как описано выше и представлено этапом 1008. Затем положение пользовательского терминала на поверхности Земли определяется с использованием известных положений и скоростей спутников, а также дальности, разности дальностей и разности скоростей изменения дальностей. как представлено этапом 1010 и описано ниже.
Во втором варианте осуществления настоящего изобретения определение местоположения основывается на использовании дальности, разности дальностей и скорости изменения дальностей. На фиг.8 представлен случай, соответствующий фиг.7, но изо-Δ f-контура заменены на изо-КТDор-контура, измеренные относительно спутника 104А, как показано сплошными линиями 804. Изо-RTDop-контура подобны гиперболам и симметричны относительно вектора скорости спутника 104А. Каждый RTDop-контур соединяет точки на поверхности Земли, имеющие один и тот же доплеровский сдвиг по отношению к спутнику 104А. Изо-RTDop-контура градуированы в кГц, причем контур RTDop=0 проходит через подспутниковую точку 614А спутника 104А. Таким образом, наблюдателю, находящемуся на контуре RTDop=0, спутник 104А будет представляться как не перемещающийся ни к наблюдателю, ни от наблюдателя.
На фиг.11 представлена блок-схема последовательности операций согласно данному второму варианту осуществления изобретения. Определяются один или несколько параметров дальности, как описано выше и представлено этапом 1102. Определяются один или несколько параметров разности дальностей, как описано выше и представлено этапом 1104. Определяются один или несколько параметров скоростей изменения дальностей, как описано выше и представлено этапом 1106 Затем положение пользовательского терминала на поверхности Земли определяется с использованием известных положений и скоростей спутников, а также дальности, разности дальностей и скорости изменения дальностей, как представлено этапом 1110 и описано ниже.
Как следует из фиг.8, параметр RTDop скорости изменения дальности может уменьшить проблему сингулярности ГСТ, свойственную способу позиционирования с использованием только дальности и разности дальностей. Однако в редких случаях один только параметр скорости изменения дальности недостаточен для разрешения сингулярности ГСТ. В таких случаях сингулярность ГСТ может быть разрешена с использованием всех четырех параметров. Таким образом, в третьем варианте осуществления настоящего изобретения определение местоположения базируется на дальности, разности дальностей, скорости изменения дальностей и разности скоростей изменения дальностей. Специалисту в данной области техники должно быть ясно, что дальнейшее повышение точности может быть достигнуто за счет использования более чем одного значения каждого параметра в любом из вариантов, описанных выше.
На фиг.12 представлена блок-схема последовательности операций согласно данному третьему варианту осуществления изобретения. Определяются один или несколько параметров дальности, как описано выше и представлено этапом 1202. Определяются один или несколько параметров разности дальностей, как описано выше и представлено этапом 1204. Определяются один или несколько параметров скоростей изменения дальностей, как описано выше и представлено этапом 1206. Определяются один или несколько параметров разности скоростей изменения дальностей, как описано выше и представлено этапом 1208. Затем положение пользовательского терминала на поверхности Земли определяется с использованием известных положений и скоростей спутников, а также дальности, разности дальностей, скорости изменения дальностей и разности скоростей изменения дальностей, как представлено этапом 1210 и описано ниже.
5. Выполнение позиционирования
Прежде чем детально описывать выполнение позиционирования, полезно сначала рассмотреть среду, в которой может осуществляться способ позиционирования, соответствующий изобретению. На фиг.13 представлена блок-схема, иллюстрирующая такую среду, представляющую собой компьютерную систему 1300, которая может составлять часть управляющего процессора 220 и/или управляющего процессора 320. Компьютерная система 1300 содержит один или несколько процессоров, таких как процессор 1304. Процессор 1304 соединен с шиной связи 1306. Различные варианты выполнения описаны в терминах данной взятой для примера компьютерной системы. Для специалиста в данной области техники должно быть ясно, каким образом реализовать способ позиционирования, соответствующий изобретению, с использованием других компьютерных систем, компьютерных архитектур, конечных автоматов аппаратного обеспечения, таблиц перекодировки и т.п., а также комбинаций перечисленных средств.
Компьютерная система 1300 содержит основную память 1308, предпочтительно ЗУПВ, и может также включать вспомогательную память 1310. Вспомогательная память 1310 может включать в себя, например, дисковод 1312 на жестких дисках и/или дисковод 1314 на съемной памяти, например дисковод на гибких дисках, на магнитной ленте, на оптических дисках и т.п. Дисковод 1314 на съемной памяти считывает и/или записывает на съемный блок памяти 1318 хорошо известным способом. Съемный блок памяти 1318 представляет собой гибкий диск, магнитную ленту, на оптический диск и т.п. Съемный блок памяти 1318 включает компьютерный носитель информации, на котором хранится компьютерная программа и/или данные.
В альтернативных вариантах вспомогательная память 1310 может включать в себя иные аналогичные средства для загрузки компьютерных программ или иных команд в компьютерную систему 1300. Такие средства могут включать в себя съемный блок памяти 1322 и интерфейс 1320. Примерами таких средств могут быть картриджи программ и интерфейс для картриджа (например, как в видеоиграх), схемную плату памяти (например, электрически стираемое программируемое ПЗУ ЭСППЗУ или ППЗУ) с соответствующим гнездом и другие схемные блоки памяти 1322 и интерфейсы 1320, которые обеспечивают пересылку программ и данных со съемного блока памяти 1322 в компьютерную систему 1300.
Компьютерная система 1300 может также включать в себя интерфейс связи 1324. Интерфейс связи 1324 обеспечивает возможность пересылки программ и данных между компьютерной системой 1300 и внешними устройствами посредством канала связи 1326. Примерами интерфейсов связи 1324 могут служить модем, сетевой интерфейс (например, карта Ethernet), коммуникационный порт и т.п. Программы и данные, пересылаемые через интерфейс связи 1324, имеют форму сигналов, которые могут быть электронными, электромагнитными, оптическими или иными видами сигналов, имеющими возможность приема интерфейсами связи 1324 посредством канала связи 1326.
Осуществление способа позиционирования в соответствии с настоящим изобретением описывается на примере данной приведенной для примера компьютерной среды. Данное описание приведено только для удобства понимания. При этом не предполагается, что операции способа позиционирования. соответствующего изобретению, должны ограничиваться приведенным примером. В действительности, специалисту в данной области техники должно быть ясно, каким образом осуществить данное изобретение в альтернативной компьютерной среде.
В одном из вариантов осуществления настоящего изобретения местоположение пользовательского терминала 106 определяется путем осуществления способа позиционирования, описанного ниже на примере компьютерной системы 1300. Специалисту в данной области техники должно быть ясно, что способ позиционирования может быть выполнен с использованием конечных автоматов аппаратного обеспечения, таблиц перекодировки и т.п. без изменения сущности и объема настоящего изобретения.
Формируется М× 1 вектор параметров, обозначенный z, состоящий из М параметров, используемых при определении местоположения. Вектор z может включать один или несколько параметров, описанных выше. Как известно в технике, параметры являются нелинейными функциями 2-мерного вектора х местоположения пользовательского терминала, имеющего вид

где верхний индекс “Т” указывает на транспонирование матрицы или вектора в соответствии с соотношением

где М× 1 вектор z представляет ошибки измерений, h - нелинейная функция, которая описывает соотношение между измеренными параметрами и положением пользовательского терминала 106. Т.е. h является функцией положений и скоростей спутников 104А и 104В. В альтернативном варианте осуществления вектор х местоположения пользовательского терминала может быть определен тремя декартовыми координатами, а не широтой и долготой, как представлено ниже в уравнении (7):

Согласно гауссовскому методу линеаризации М× К парциальная производная матрица Н формируется для определения местоположения пользовательского терминала 106, где К - число неизвестных местоположения, причем элемент матрицы (m, k) является парциальной производной m-го измерения по отношению к k-ому параметру местоположения, полученного для данного положения х. Например, если вектор местоположения описывает широту и долготу, как в уравнении (5), то К равно 2, и элементы в k=1 столбце матрицы Н описывают парциальные производные относительно широты пользовательского терминала 106, а элементы в k=2 столбце матрицы Н описывают парциальные производные относительно долготы пользовательского терминала 106. Если вектор местоположения задан в декартовых координатах (К=3), то k=(1, 2, 3) столбцы матрицы Н относятся к координатам (x, y, z) соответственно. Если используются декартовы координаты, то используется дополнительное уравнение для указания квадратов координат равна квадрату радиуса Земли. Соотношение между х и Н определяется следующим образом:
Итеративный взвешенный метод наименьших квадратов используется для определения неизвестных параметров местоположения. В предпочтительном варианте осуществления изобретения используется взвешенный метод Гаусса-Ньютона, описанный в работе H.W.Sorenson, Parameter Estimation - Principles and Problems, New York, Marcel Dekker, 1980. Итеративное уравнение задается в следующем виде:

где  и
и  - оценки текущего и следующего положений соответственно, a W - М× М матрица весов. Индекс i представляет номер итерации, причем i=0 представляет первую итерацию. Матрицы или векторы, основанные на оценке местоположения, указываются верхним индексом “^”. Опорная точка, т.е. последнее известное местоположение пользовательского терминала выбирается в качестве начальной оценки местоположения. Если отсутствует последнее известное местоположение пользовательского терминала, то может использоваться любое положение, например положение узла межсетевого сопряжения 102.
- оценки текущего и следующего положений соответственно, a W - М× М матрица весов. Индекс i представляет номер итерации, причем i=0 представляет первую итерацию. Матрицы или векторы, основанные на оценке местоположения, указываются верхним индексом “^”. Опорная точка, т.е. последнее известное местоположение пользовательского терминала выбирается в качестве начальной оценки местоположения. Если отсутствует последнее известное местоположение пользовательского терминала, то может использоваться любое положение, например положение узла межсетевого сопряжения 102.
Парциальная производная матрица, определяемая при текущей оценке местоположения, определяется в виде

а соотношение представляет ожидаемые параметры, не содержащие ошибок, определенные с использованием текущей оценки местоположения. Итерации заканчиваются, когда разность между  и
и  уменьшается ниже предварительно определенного порога. Порог определяется разработчиками системы и/или операторами с учетом точности системы, как это известно в технике. Например, порог может базироваться на точности элемента кода при измерениях и на частоте следования элементов кода.
уменьшается ниже предварительно определенного порога. Порог определяется разработчиками системы и/или операторами с учетом точности системы, как это известно в технике. Например, порог может базироваться на точности элемента кода при измерениях и на частоте следования элементов кода.
Элементы М× М матрицы весов W обеспечивают возможность учесть влияние конкретных параметров на оценку местоположения  , когда имеется больше параметров, чем неизвестных. В предпочтительном варианте осуществления матрица весов W является диагональной матрицей, элементы которой отражают относительную точность, с которой может определяться каждый параметр. Таким образом, значения элементов устанавливаются на основе известной точности измерений системы, как это очевидно для специалиста в данной области техники. Поэтому параметр, основывающийся на очень точном измерении, имеет большую значимость, чем параметр, который не может быть измерен с такой же точностью. Элементы матрицы весов инициализируются на предварительно определенные значения, но могут динамически подстраиваться. Оптимальная точность обеспечивается, если матрица весов выбирается как инверсная ковариационной матрице ошибок измерений.
, когда имеется больше параметров, чем неизвестных. В предпочтительном варианте осуществления матрица весов W является диагональной матрицей, элементы которой отражают относительную точность, с которой может определяться каждый параметр. Таким образом, значения элементов устанавливаются на основе известной точности измерений системы, как это очевидно для специалиста в данной области техники. Поэтому параметр, основывающийся на очень точном измерении, имеет большую значимость, чем параметр, который не может быть измерен с такой же точностью. Элементы матрицы весов инициализируются на предварительно определенные значения, но могут динамически подстраиваться. Оптимальная точность обеспечивается, если матрица весов выбирается как инверсная ковариационной матрице ошибок измерений.
Если ошибки измерений взаимно независимы с нулевым средним и дисперсией:

то W - диагональная матрица с  в качестве ее диагональных элементов. При таком выборе W дисперсия k-го элемента вектора х оценки местоположения определяется в виде
в качестве ее диагональных элементов. При таком выборе W дисперсия k-го элемента вектора х оценки местоположения определяется в виде

Наконец, объединенная теоретическая ошибка местоположения по горизонтали, выраженная в единицах расстояния, определяется следующим образом:

где RE - радиус Земли.
Обычно, если выбрана корректная матрица весов в соответствии с дисперсиями ошибок, итерации могут сходиться к локальному минимуму в соответствии с зеркальным отображением истинного решения на противоположную сторону базовой линии 612. Можно определить окрестность другого решения с использованием этого первого решения путем отображения его относительно базовой линии 612. Новый цикл итераций необходим для нахождения точного второго решения. Как только получены два возможных решения, все еще необходимо отыскать то, которое является истинным. Это выполняется путем сравнения вычисленных частот в соответствии с каждым решением с измеренными частотами.
Ниже описан лучший способ, который гарантирует более прямую сходимость итераций к корректному решению. Этот способ называется “адаптацией матрицы весов”. В качестве примера, когда частотные измерения имеют дисперсию ошибок, превышающую временные измерения, частотным измерениям придаются меньшие веса в корректно сформированной матрице весов. Однако, как указано выше, это может привести к сходимости зеркального решения. Таким образом, исходная матрица весов (управляющая матрица весов) выбирается произвольным образом, чтобы придать больший вес частотным измерениям (в приведенном выше примере), чем “корректный” результат, основанный на дисперсиях ошибок. Это обеспечивает то, что итерации сводятся к истинному решению, а не к зеркальному решению. Спустя фиксированное предварительно определенное число итераций (обычно малое число) или после того, как будет достигнуто состояние вблизи сходимости (что определяется измерением разности между  и
и  ), осуществляется переключение на "корректную" (оптимальную) матрицу весов W, описанную выше. Этот последний этап обеспечивает то, что получаемая в конечном счете ошибка в данном решении является минимально возможной. Вышеуказанный способ может быть обобщен для изменения матрицы весов более чем однократно.
), осуществляется переключение на "корректную" (оптимальную) матрицу весов W, описанную выше. Этот последний этап обеспечивает то, что получаемая в конечном счете ошибка в данном решении является минимально возможной. Вышеуказанный способ может быть обобщен для изменения матрицы весов более чем однократно.
В предпочтительном варианте осуществления изобретения способ позиционирования использует сглаженную эллипсоидальную модель поверхности Земли. В альтернативном варианте осуществления способ позиционирования первоначально использует сглаженную эллипсоидальную модель поверхности Земли, такую, как модель Земли WGS-84. Если значения х сходятся таким образом, что разность между  и
и  становится меньше, чем предварительно определенный порог, детальная цифровая модель Земли заменяется сглаженной моделью, и итерации продолжают сходиться до тех пор, пока разность между
становится меньше, чем предварительно определенный порог, детальная цифровая модель Земли заменяется сглаженной моделью, и итерации продолжают сходиться до тех пор, пока разность между  и
и  не станет меньше, чем второй предварительно определенный порог. Таким образом, любые ошибки, обусловленные поднятым положением пользовательского терминала 106, уменьшаются. В альтернативном варианте осуществления детальная цифровая модель Земли заменяется спустя предварительно определенное число итераций. Значения порогов для расстояний и число итераций, описанные выше, определяются в соответствии с различными факторами, как это очевидно для специалиста в данной области техники.
не станет меньше, чем второй предварительно определенный порог. Таким образом, любые ошибки, обусловленные поднятым положением пользовательского терминала 106, уменьшаются. В альтернативном варианте осуществления детальная цифровая модель Земли заменяется спустя предварительно определенное число итераций. Значения порогов для расстояний и число итераций, описанные выше, определяются в соответствии с различными факторами, как это очевидно для специалиста в данной области техники.
В альтернативном варианте осуществления можно оценить высоту расположения над поверхностью Земли. Дополнительное фиктивное измерение - расстояние до центра Земли, которое рассматривается в связи с использованием декартовых координат, не должно обрабатываться как реальное измерение. В связи с ним ошибка σ h и соответствующий вес  будут обеспечивать плавный переход от двумерного позиционирования к трехмерному позиционированию, при котором также оценивается высота над поверхностью Земли, соответствующей гладкой модели. Добавление неизвестной высоты может быть аналогичным образом реализовано в полярных координатах (широта долгота, высота). В таком случае добавляется фиктивное измерение высоты.
будут обеспечивать плавный переход от двумерного позиционирования к трехмерному позиционированию, при котором также оценивается высота над поверхностью Земли, соответствующей гладкой модели. Добавление неизвестной высоты может быть аналогичным образом реализовано в полярных координатах (широта долгота, высота). В таком случае добавляется фиктивное измерение высоты.
Ошибка, связанная с фиктивным измерением, определяет степень, с которой оценка высоты может флуктуировать относительно предполагаемого значения высоты. Если ошибка возрастает, то вес, связанный с этим измерением, снижается, и процедура позиционирования переходит в большей степени к трехмерному позиционированию. Недостатком дополнительного введения неизвестной высоты является то, что оно обуславливает более высокую чувствительность неизвестного местоположения по горизонтали к ошибкам реальных измерений. Поэтому предпочтительно присваивать большую ошибку (малый вес) фиктивному измерению высоты только в тех районах, где высота изменяется быстро в функции горизонтального расстояния и топографическая карта не может быть эффективно использована.
5. Выводы
Хотя выше были описаны различные варианты осуществления настоящего изобретения, следует иметь в виду, что они представлены только для примера, но не предусматривают никаких ограничений. Для специалистов в данной области техники должно быть ясно, что могут быть осуществлены различные изменения по форме и в деталях без изменения сущности и объема изобретения. Таким образом, заявленное изобретение не ограничивается вышеописанными примерами осуществления, а должно определяться в соответствии с пунктами формулы изобретения.
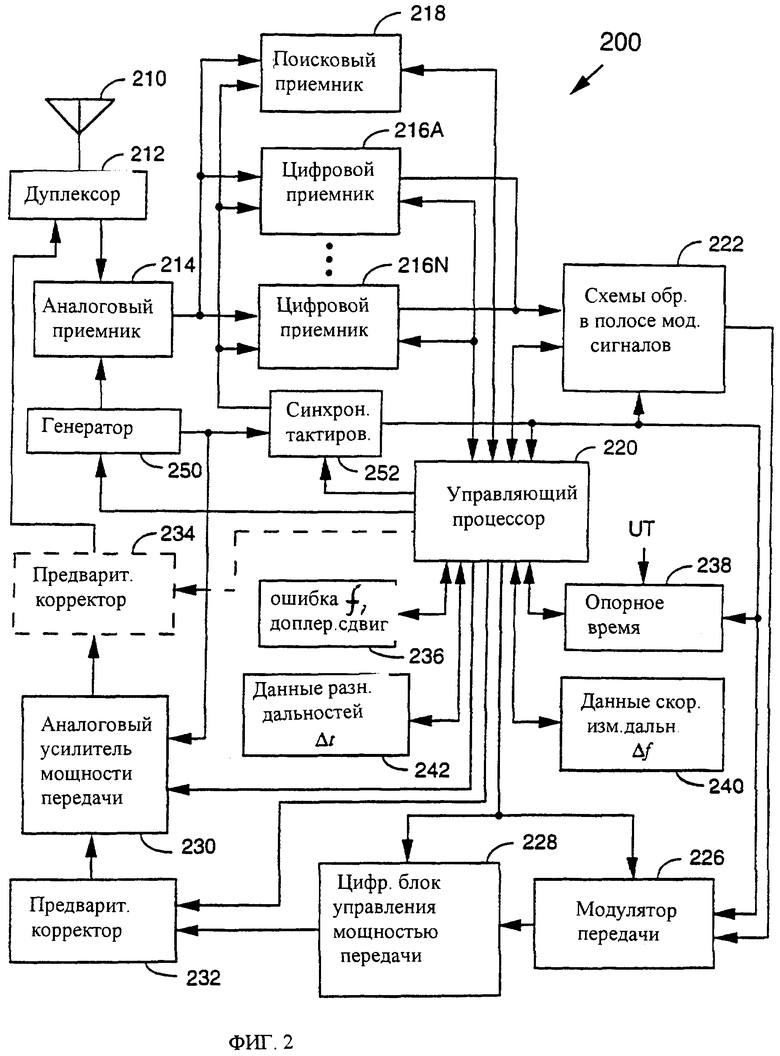
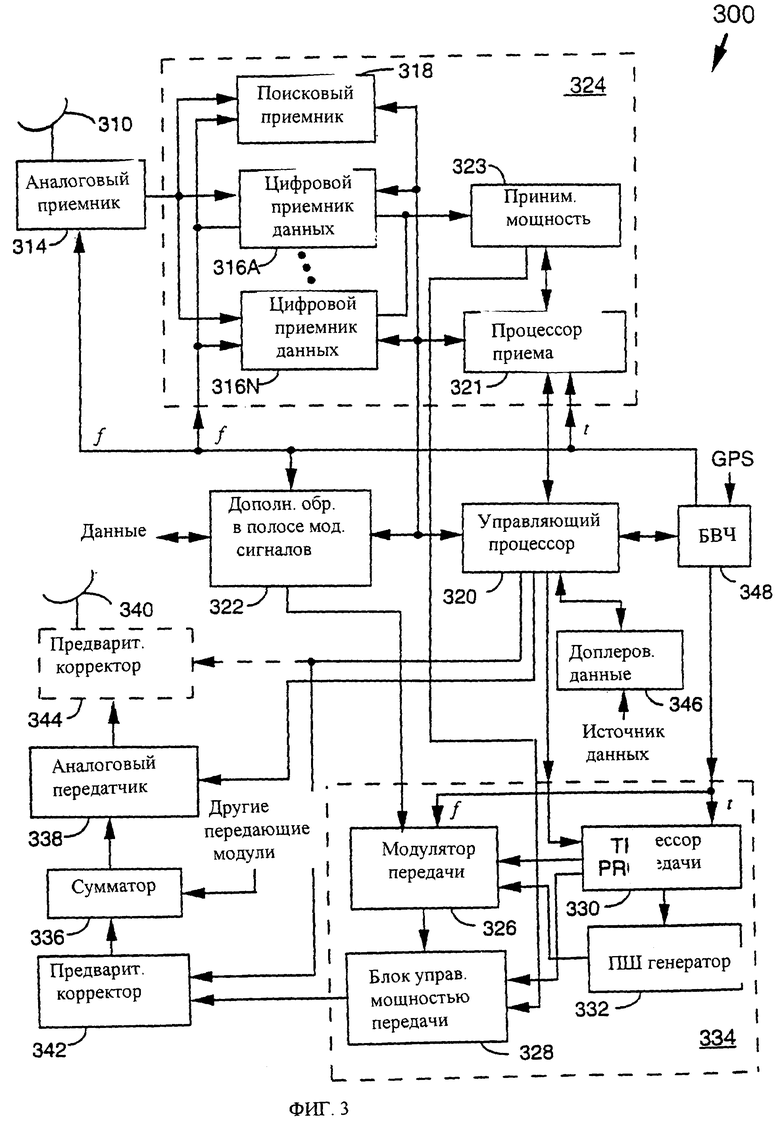
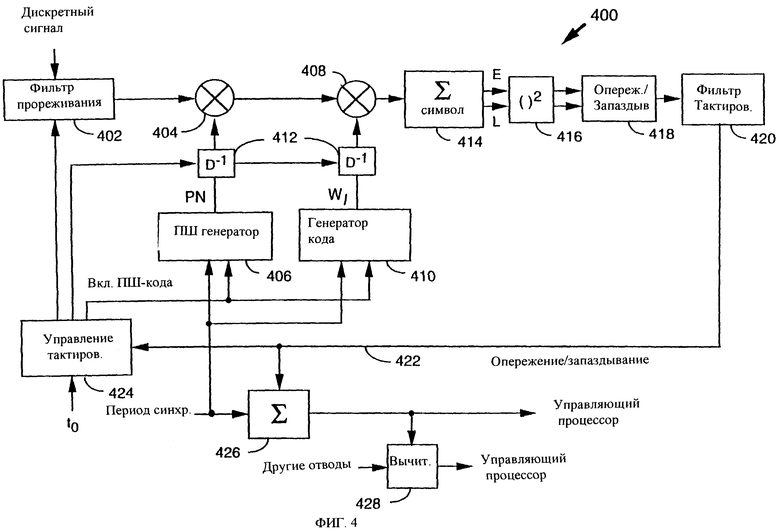
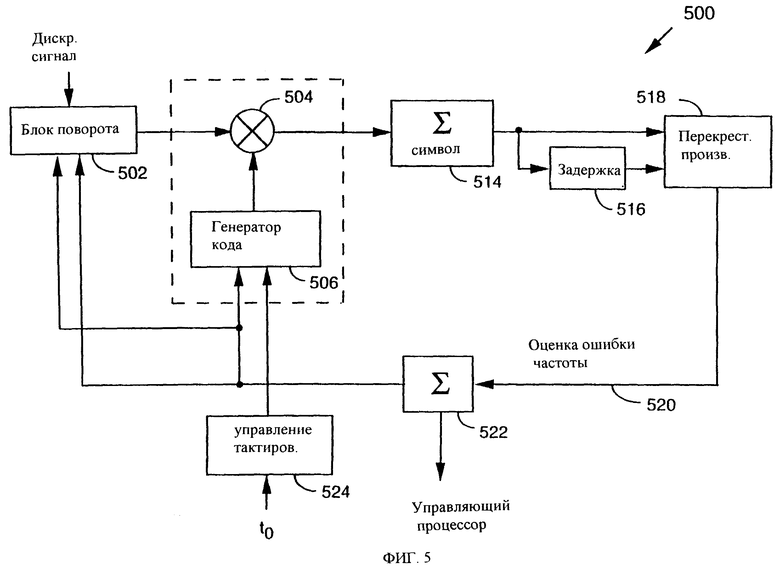
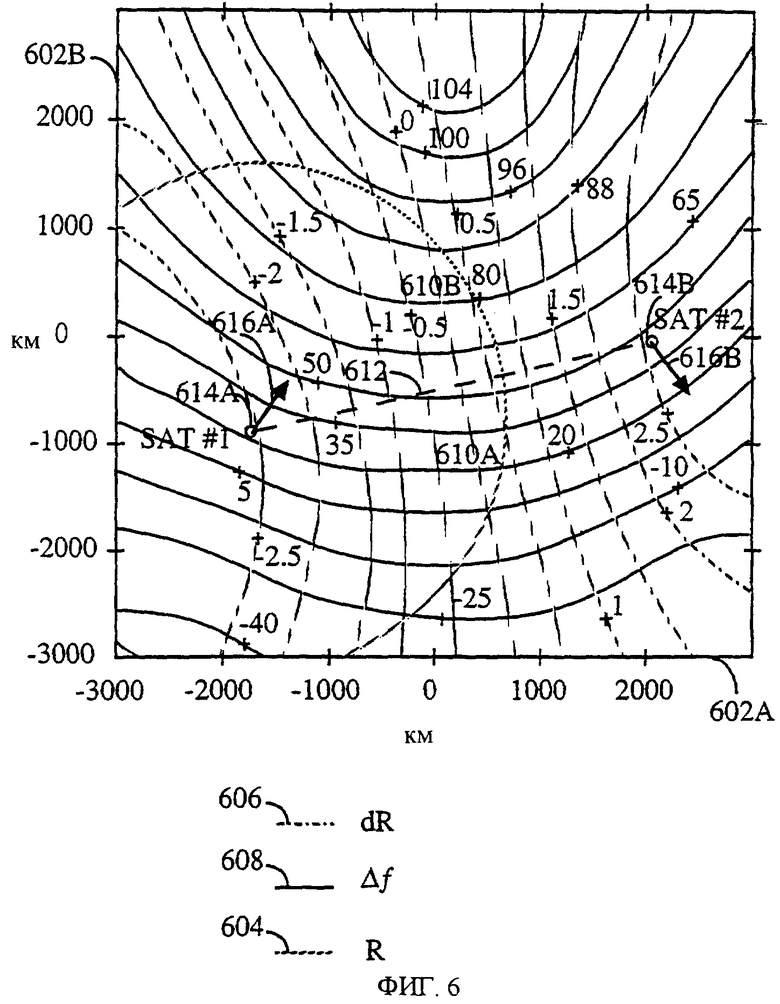
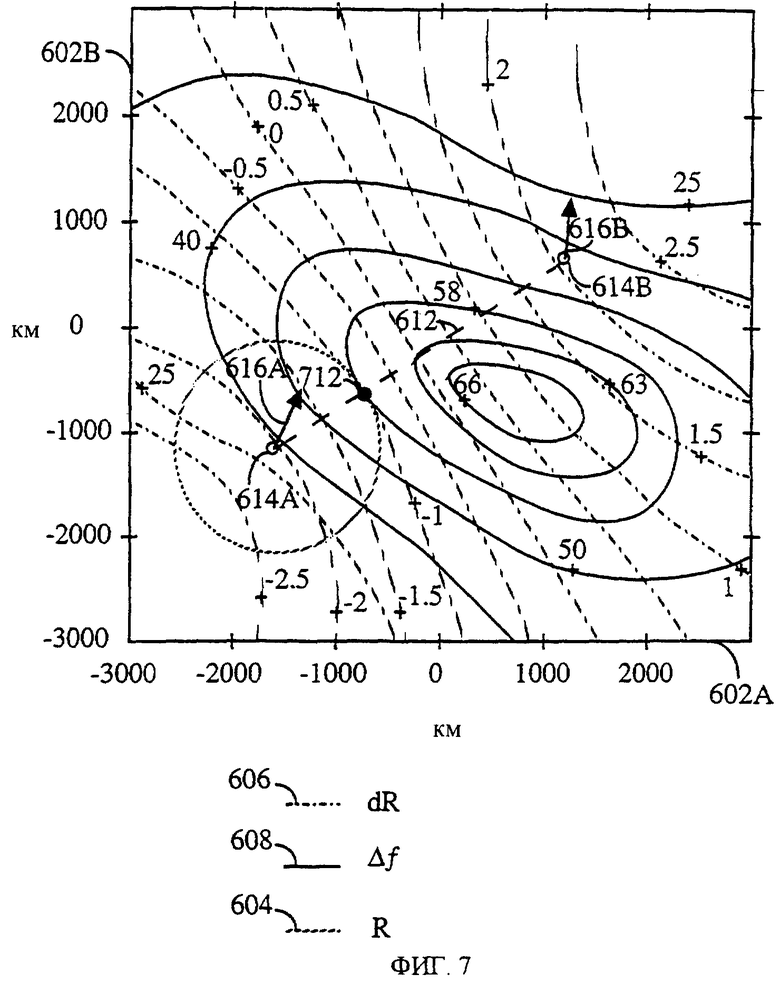
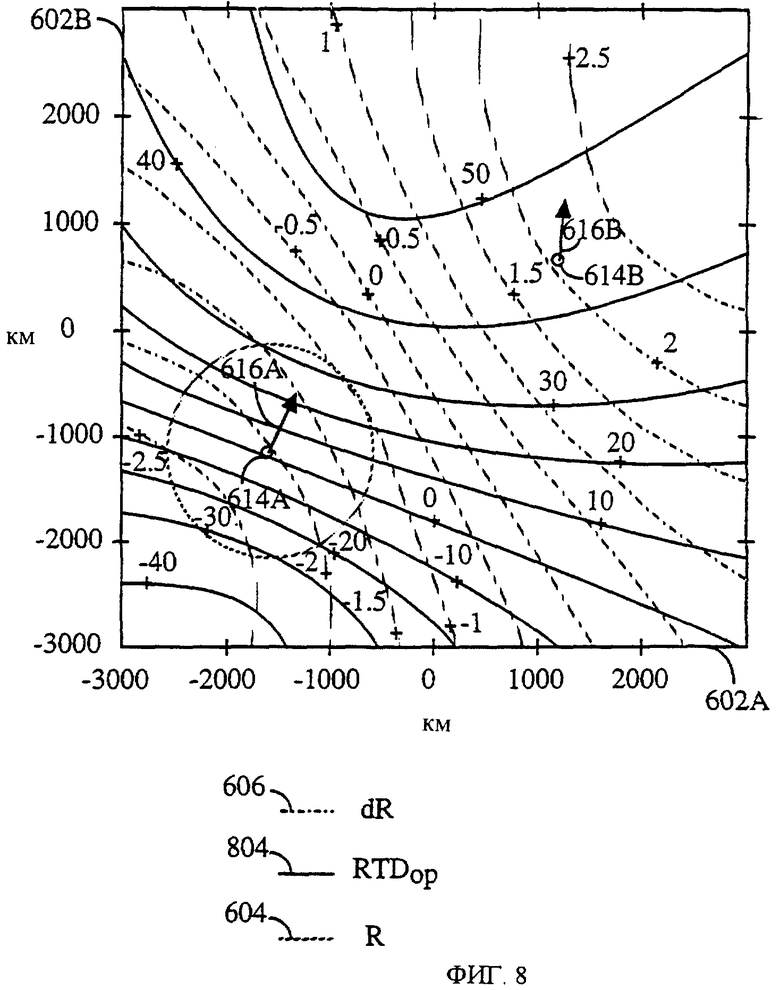
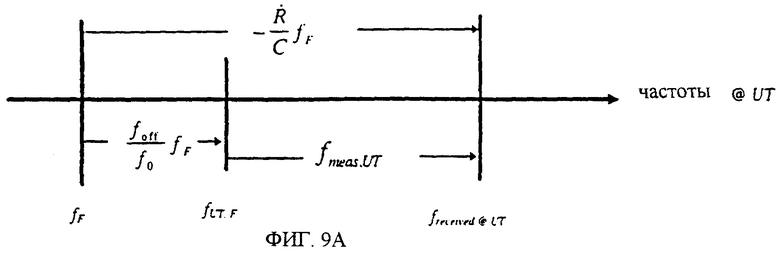
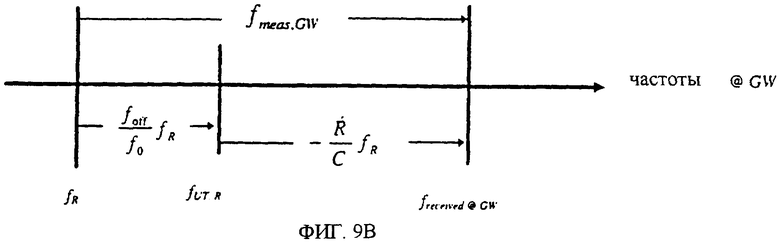
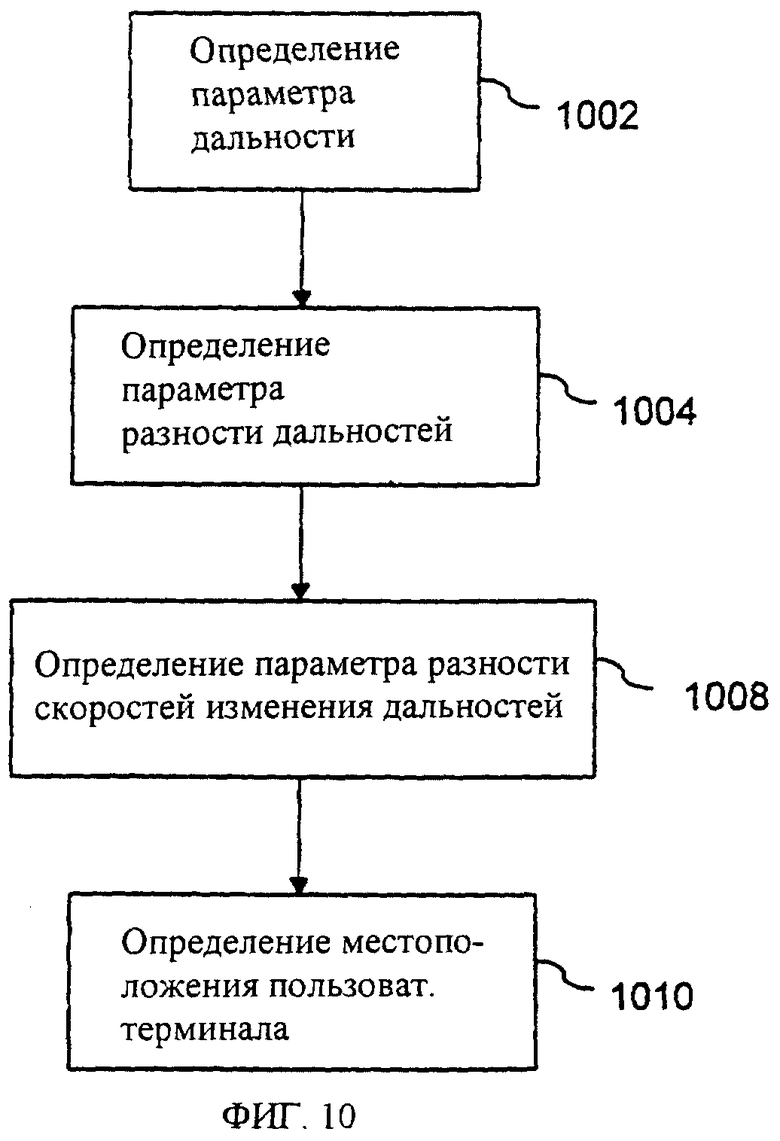
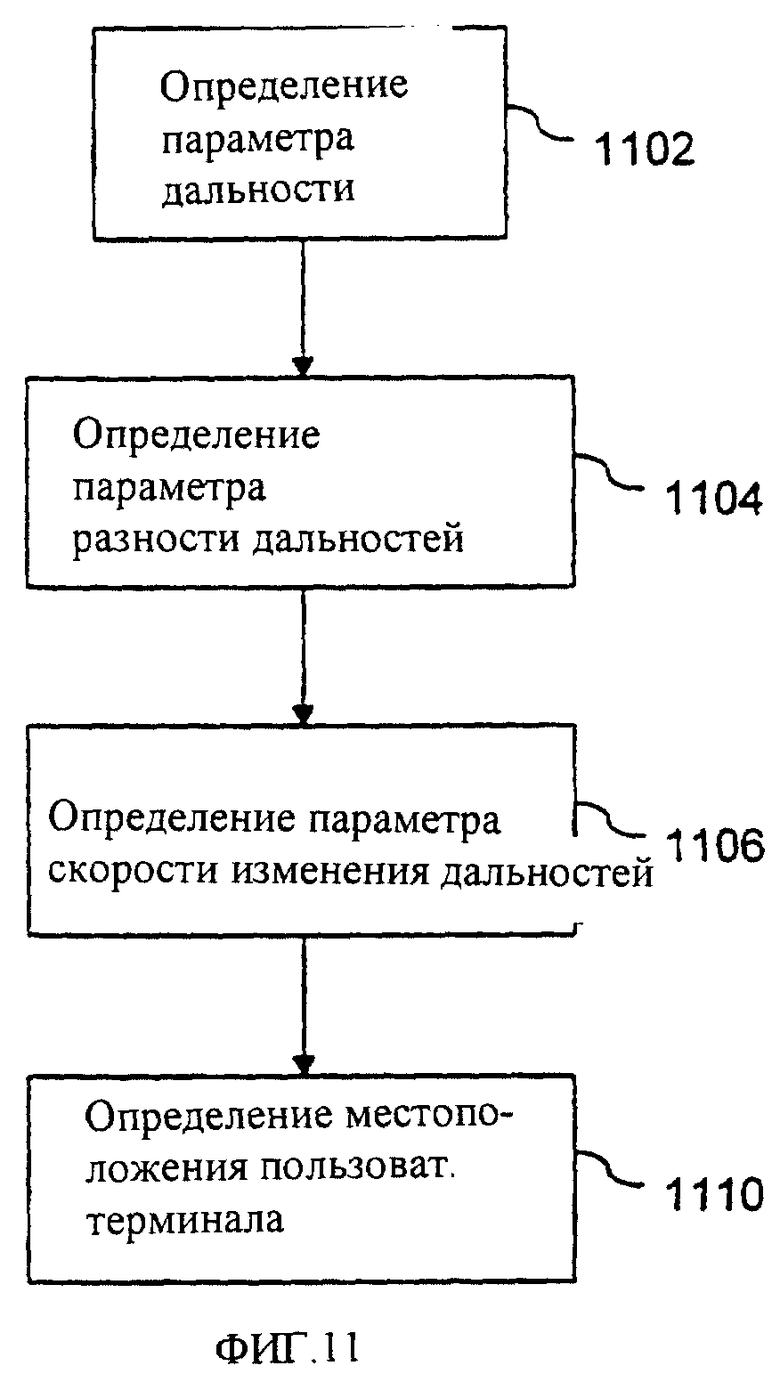
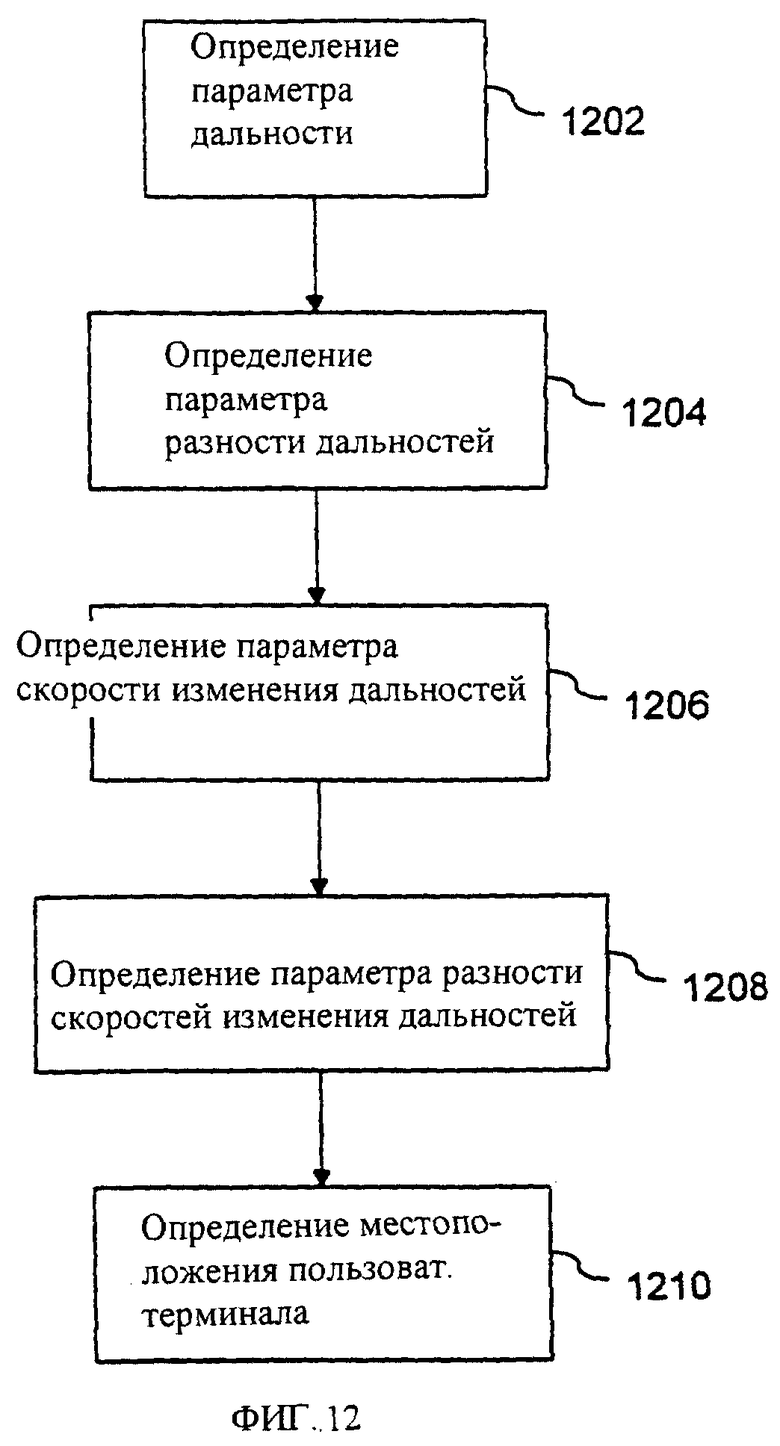
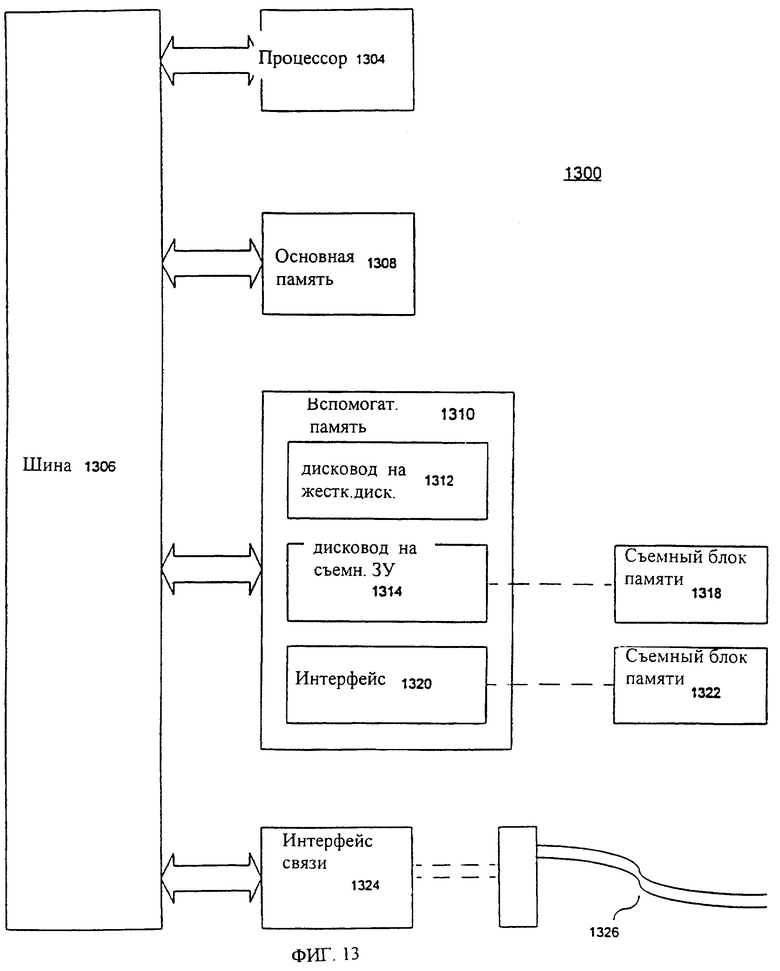
Изобретение относится к определению местоположения объектов, в частности пользовательских терминалов (ПТ), с использованием средств спутниковой системы связи. Предлагаемая система содержит ПТ (мобильный телефон), узел межсетевого сопряжения, по крайней мере два спутника с известными орбитами, средства определения таких параметров, как расстояния от ПТ до каждого из спутников и их разность. Предусмотрены также средства (одно или оба) для определения таких параметров, как радиальная скорость одного из спутников относительно ПТ и разность между радиальными скоростями одного и другого спутников относительно ПТ. С вышеуказанными средствами взаимодействует средство определения местоположения ПТ в узле межсетевого сопряжения. Последнее действует на основе известных положений и скоростей (орбит) спутников и указанных параметров: расстояний спутников от ПТ, радиальных скоростей и их разностей. При этом производится уточнение оценок положений спутников на основе обработки результатов измерений данных параметров. Технический результат изобретения состоит в обеспечении однозначного определения местоположения ПТ с высоким быстродействием. 7 н. и 21 з.п. ф-лы, 14 ил.
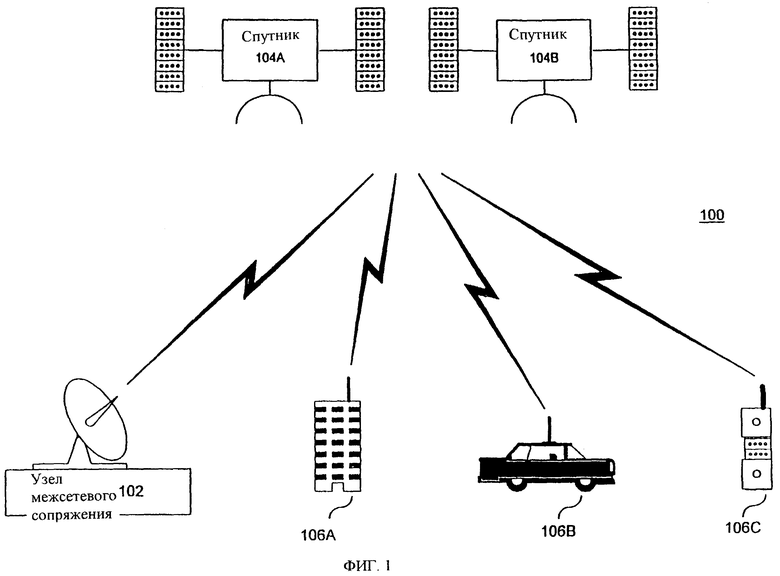
средство для генерации М×М весовой матрицы W для учета влияния отдельных параметров и средство для решения итерационного уравнения

где  и
и  - оценки текущего и следующего местоположений спутников соответственно,
- оценки текущего и следующего местоположений спутников соответственно,  - вектор текущих оценок упомянутых параметров; i - номер итерации, причем итерации осуществляются до тех пор, пока разность между
- вектор текущих оценок упомянутых параметров; i - номер итерации, причем итерации осуществляются до тех пор, пока разность между  и
и  не снизится ниже первого заранее заданного порога.
не снизится ниже первого заранее заданного порога.
 и
и  не снизится ниже второго заранее определенного порога, а после этого использующее точную численную модель Земли.
не снизится ниже второго заранее определенного порога, а после этого использующее точную численную модель Земли. и
и  не снизится ниже третьего заранее определенного порога, а после этого вторую весовую матрицу W2, которая представляет собой матрицу, обратную ковариационной матрице ошибок измерений, при этом первая весовая матрица W1 назначает вес параметрам скорости изменения дальности и разности скоростей изменения дальностей больший, чем параметрам дальности и разности дальностей, причем назначаемые веса различаются сильнее, чем в случае матрицы W2.
не снизится ниже третьего заранее определенного порога, а после этого вторую весовую матрицу W2, которая представляет собой матрицу, обратную ковариационной матрице ошибок измерений, при этом первая весовая матрица W1 назначает вес параметрам скорости изменения дальности и разности скоростей изменения дальностей больший, чем параметрам дальности и разности дальностей, причем назначаемые веса различаются сильнее, чем в случае матрицы W2.| US 5126748 А, 30.06.1992 | |||
| US 5412389 А, 02.05.1995 | |||
| US 5552795 А, 03.09.1996 | |||
| RU 94031143 A1, 27.08.1996. |

