Изобретение относится к устройствам контроля статических, а также динамических изменений зазоров между двумя металлическими объектами, связанными как с движением объектов относительно друг друга, так и с их деформацией и колебаниями (вибрацией) в процессе эксплуатации. Типичным примером таких объектов могут служить статор и ротор генераторов и мощных электродвигателей. Например, при сборке или эксплуатации больших сборных гидрогенераторов имеют место изменения формы ротора и статора и ее отклонение от идеальной формы. Такие отклонения могут быть постоянными или временными, связанными с изменениями режима работы, например мощности гидрогенератора. Для предотвращения аварийных ситуаций необходимо исключить уменьшение зазора до величин меньше минимально допустимой величины. Значительная неравномерность поверхности ротора и статора, а также конструктивные особенности этих элементов делают нецелесообразным использование для таких измерений широко распространенных токовихревых проксиметров. Для проведения подобных измерений может использоваться виток провода, охватывающего сердечник статора [Dr.Mai Tu Xuan, prof. Jean-Jacques Simond, Stefan Keller, Roland Wetter. Unbalanced magnetic pull and air-gap monitoring for large hydrogenerators. Laboratory for electrical machines - Institut of Energy sciences, Lausanne, May, 2006, p.2-5].
Контроль изменений магнитного поля позволяет оценить форму ротора, однако такие измерения в значительной степени зависят от режима работы генератора, что определяет их низкую достоверность с точки зрения оценки деформаций ротора или статора.
Для оценки формы ротора и статора используются также емкостные датчики воздушного зазора в виде металлического плоского электрода, который через диэлектрическую прокладку крепится к статору [VM 3.1 Air gap capacitor sensor. Datasheet. VibrosystM, 29 april 1999] или [4000 series air gap 200 mm sensor system. Bently Nevada, Part 173544, November 2005, p.1-2].
К недостаткам таких решений следует отнести относительно низкую достоверность контроля, что связано, с одной стороны, с тем, что на результатах измерения сказываются краевые эффекты емкостного датчика, а с другой стороны, эти датчики не обеспечивают возможности контроля магнитного поля в зазоре и связи между режимом работы и магнитным полем с геометрическими характеристиками. Использование для контроля дополнительных датчиков магнитного поля, с одной стороны, ограничено возможной площадью установки, поскольку близкое расположение датчиков может нарушать температурный режим в зоне установки, а их удаление один от другого приводит к неадекватной связи результатов измерения этими датчиками, поскольку в этом случае их показания относятся к разным частям статора.
Для устранения краевых эффектов в конденсаторных датчиках могут использоваться кольцевые электроды, окружающие измерительные (передающий и приемный) электроды [F.N.Todd. A design methodology for low-cost, high-performance capacitive sensor. Delft university press, 1977, p.40]. При использовании такого датчика в условиях воздействия переменных магнитных полей в замкнутом контуре может возникать ток значительной величины, который будет нагревать этот замкнутый контур, что вызовет дополнительный нагрев датчика, его деформацию и приведет к дополнительным погрешностям. Возможно также повреждение датчика.
Наиболее близким и выбранным в качестве прототипа к предложенному техническому решению является устройство измерения воздушного зазора между двумя металлическими объектами, содержащее передающий и приемный металлические электроды, которые расположены в одной плоскости и закреплены через диэлектрическую прокладку на первом металлическом объекте, генератор высокочастотных колебаний, выход которого соединен с передающим электродом, приемный электрод соединен с входом детектора профиля локальной области второго металлического объекта, выход которого соединен с входом детектора профиля второго металлического объекта, выход которого соединен с входом детектора минимального расстояния, а выходы всех детекторов соединены с входом формирователя аналогового сигнала зазора [Air gap measurement system. Vibro-meter. SA/267-005/ October 2003, p.1-2].
Недостатком этого устройства является относительно низкая достоверность измерений, что связано с отсутствием контроля в измерительной точке за величиной магнитного поля и влиянием краевых эффектов на электрическое поле между передающим и приемным электродами.
Предлагаемое изобретение направлено на повышение достоверности измерения взаимного расположения и состояния первого и второго объектов.
Указанный технический результат достигается тем, что в устройстве измерения воздушного зазора между двумя металлическими объектами, содержащее передающий и приемный металлические электроды, которые расположены в одной плоскости и закреплены через диэлектрическую прокладку на первом металлическом объекте, генератор высокочастотных колебаний, выход которого соединен с передающим электродом, приемный электрод соединен с входом детектора профиля локальной области второго металлического объекта, выход детектора профиля локальной области соединен с входом детектора профиля второго металлического объекта, выход детектора профиля второго металлического объекта соединен с входом детектора минимального расстояния, а выходы всех детекторов соединены с входом формирователя аналогового сигнала величины зазора, вокруг передающего и приемного электродов в их плоскости сформирован дополнительный электрод в виде незамкнутого контура, концы которого соединены с входами дифференциального усилителя, выход которого соединен с входом амплитудного детектора, выход которого соединен с дополнительным входом формирователя сигнала зазора.
Дифференциальный усилитель выполнен на операционном усилителе, входы которого соединены через первый и второй резисторы с входами дифференциального усилителя, между входами операционного усилителя включен конденсатор, не инвертирующий вход операционного усилителя соединен через третий резистор с общей шиной, выход операционного усилителя является выходом дифференциального усилителя и соединен с инвертирующим входом операционного усилителя через четвертый резистор.
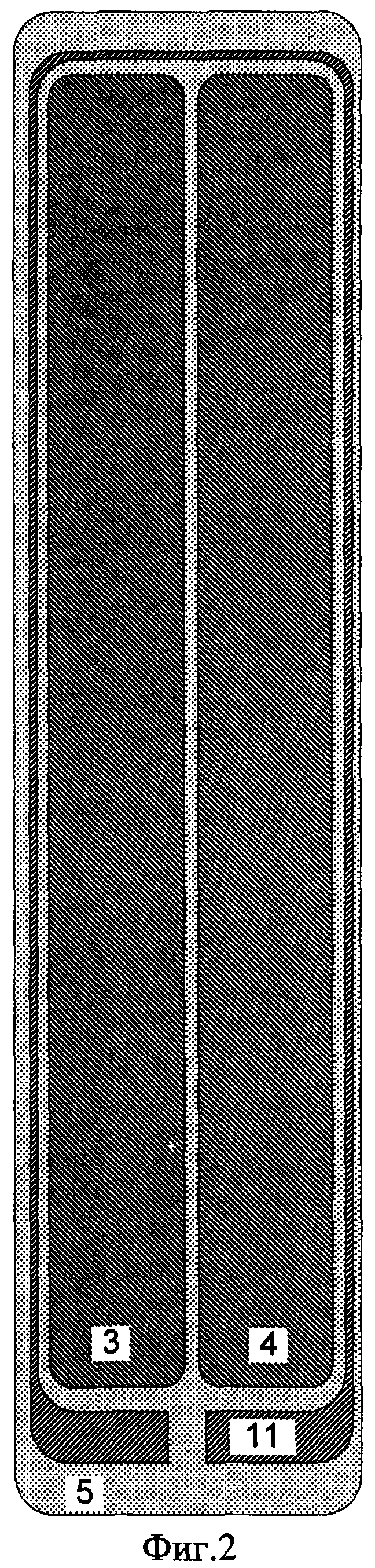
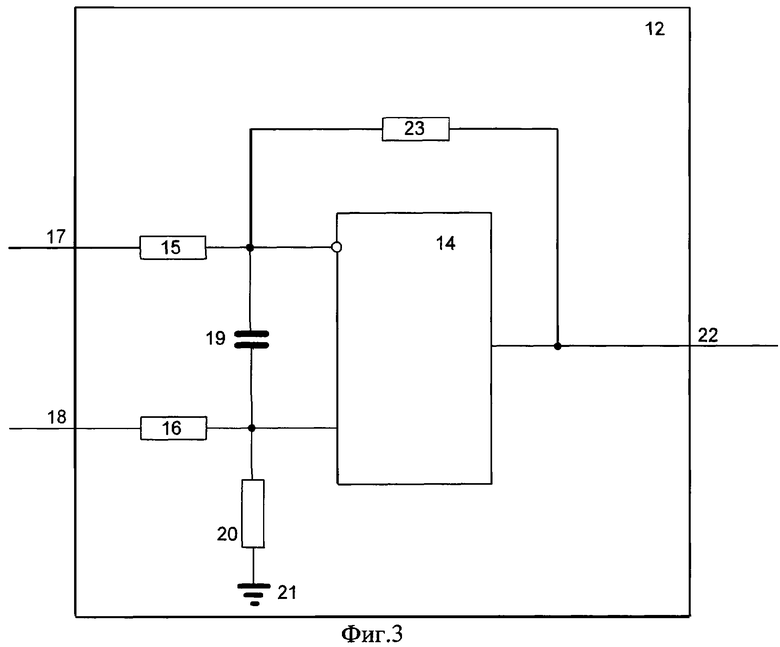
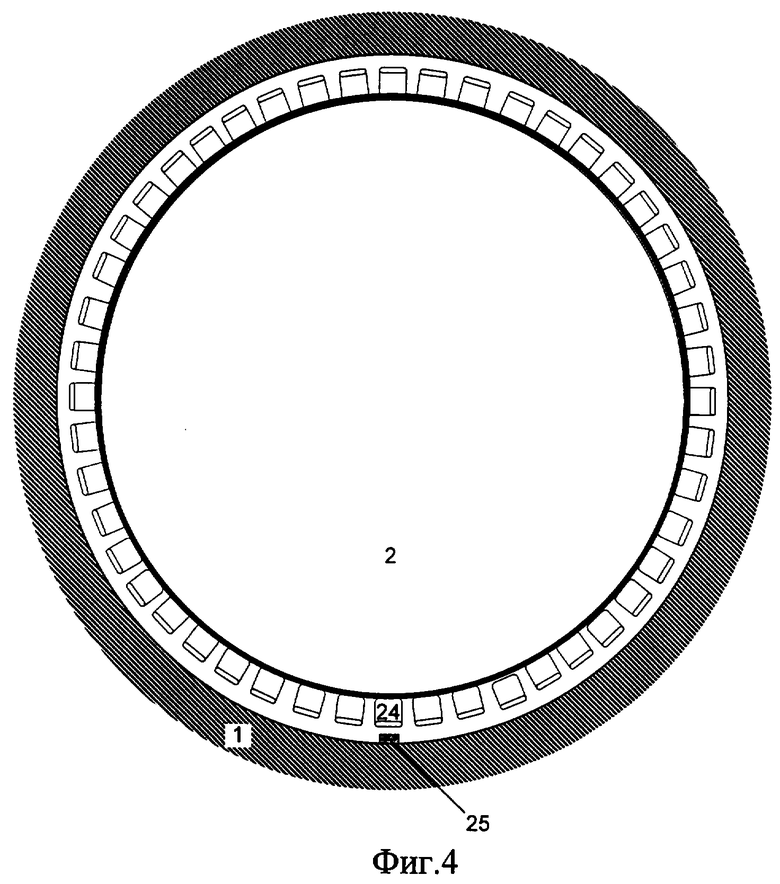
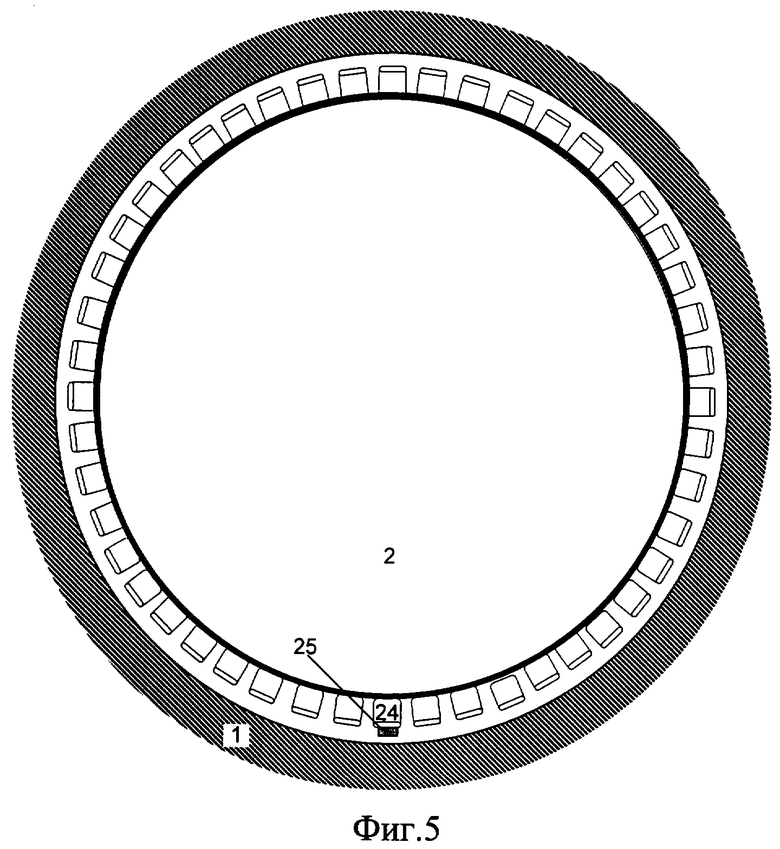
Пример выполнения устройства показан на фиг.1. На фиг.2 приведен пример выполнения электродов на диэлектрической подложке в виде печатной платы. На фиг.3 - пример структурной схемы дифференциального усилителя. Фиг.4 и 5 показывают организацию устройства для измерения зазора, когда металлическими объектами являются статор и ротор генератора.
Устройство измерения воздушного зазора между двумя металлическими объектами 1 и 2, содержащее передающий 3 и приемный 4 металлические электроды, которые расположены в одной плоскости и закреплены через диэлектрическую прокладку 5 на первом металлическом объекте 1. Устройство также содержит генератор высокочастотных колебаний 6, выход которого соединен с передающим электродом 3, приемный 4 электрод соединен с входом детектора 7 профиля локальной области второго металлического объекта 2, выход детектора 7 соединен с входом детектора 8 профиля второго металлического объекта 2, выход которого соединен с входом детектора 9 минимального расстояния, а выходы всех детекторов 7-9 соединены с входом формирователя 10 аналогового сигнала зазора. Вокруг передающего 3 и приемного 4 электродов в их плоскости сформирован дополнительный электрод 11 в виде незамкнутого контура, концы которого соединены с входами дифференциального усилителя 12, выход которого соединен с входом амплитудного детектора 13, выход которого соединен с дополнительным входом формирователя сигнала зазора. 10.
Передающий 3, приемный 4 и дополнительный электрод 11 в виде незамкнутого контура и диэлектрическая прокладка 5 выполнены в виде односторонней печатной платы, пример расположения электродов на которой показан на фиг.2.
Дифференциальный усилитель 12 может быть выполнен на операционном усилителе 14, входы которого соединены через первый 15 и второй 16 резисторы с входами 17 и 18 соответственно дифференциального усилителя 12, между входами операционного усилителя 14 включен конденсатор 19, не инвертирующий вход операционного усилителя соединен через третий резистор 20 с общей шиной 21, выход операционного усилителя 14 является выходом 22 дифференциального усилителя и соединен с инвертирующим входом операционного усилителя 14 через четвертый резистор 23.
Устройство работает следующим образом. Генератор 6 формирует электрический сигнал высокой частоты, который поступает на передающий электрод 3. Этот электрод формирует электрическое поле, которое распространяется как в сторону первого объекта, например статора 1, так и в сторону второго объекта (ротора) 2. Поле также попадает на приемный электрод 4. На фиг.1 пунктиром показаны линии электрического поля в воздушном зазоре статор-ротор. В зависимости от расстояния между статором и ротором, т.е. от величины воздушного зазора, меняется величина емкости между электродами 3 и 4. Поскольку величина этой емкости невелика, важно снизить влияние краевых эффектов. Это обеспечивается дополнительным электродом 11, который подключен к входам дифференциального усилителя 12. Для сигналов генератора 6, наводок и помех эквивалентное сопротивление емкостей между электродами существенно выше входного сопротивления дифференциального усилителя 12. Другими словами, для таких сигналов, наводок и помех потенциал дополнительного электрода близок к потенциалу «виртуальной земли» входов операционного усилителя 14. Кроме того, поскольку форма электрода 11 симметрична для таких сигналов, можно считать, что его потенциал постоянный для всего этого электрода.
Сигнал с электрода 4 поступает на детектор 7 профиля локальной области ротора, находящейся в текущее время над электродами 3 и 4. Этот детектор формирует оценку профиля данной области по текущей величине зазора, например описывает форму одного полюса ротора. Минимальное или среднее значение характеризует расстояние от статора до данного полюса. Постоянная времени этого детектора должна быть меньше времени прохождения полюса над электродами. Детектор профиля 8 отслеживает минимальные или средние значения для последовательно проходящих полюсов, т.е. описывает уже форму ротора как последовательность оценок расстояний каждого из полюсов ротора от статора. Контроль общего минимального расстояния, выполняемого детектором 9, позволяет оценить возможность задеваний ротора за статор. Формируемые оценки передаются на регистрирующую, сигнализирующую или управляющую аппаратуру через формирователь сигналов зазора 10.
Переменное магнитной поле от ротора воздействует на дополнительный электрод 11, формируя в нем ЭДС, которая зависит от величины магнитного поля. Эта ЭДС поступает на входы дифференциального усилителя 12, который подавляет симметричные составляющие и позволяет выделить указанную ЭДС. Наличие конденсатора позволяет снизить влияние высокочастотных составляющих, наводимых на дополнительный электрод 11. Выходной сигнал дифференциального усилителя 12 поступает на амплитудный детектор 13, на выходе которого формируется сигнал, характеризующий «магнитную» форму ротора. Эта форма зависит от режима работы контролируемого объекта, а также от наличия в нем дефектов, например межвитковых замыканий. Одновременный синхронный контроль геометрической и магнитной форм в одной и той же измерительной точке предлагаемым устройством 25 позволяет выявить наличие дефектов и отклонений в работе оборудования.
Следует учитывать, что поскольку сопротивление источника ЭДС весьма мало, возможно использование дифференциального усилителя с относительно низким входным сопротивлением, что обеспечивает простую реализуемость экранирования дополнительным электродом.
Для контроля формы неподвижной части - статора - предлагаемое устройство может быть расположено и на роторной части (фиг.5), в этом случае результаты могут передаваться на регистрирующую, сигнализирующую или управляющую аппаратуру через формирователь сигналов зазора 10 через токосъемные контакты или через беспроводные каналы связи, информацию для которых передает в соответствующей форме (в виде оптических или радио сигналов) формирователь 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВОЗДУШНОГО ЗАЗОРА | 2006 |
|
RU2318183C1 |
| УСТРОЙСТВО КОНТРОЛЯ ВОЗДУШНОГО ЗАЗОРА | 2006 |
|
RU2318184C1 |
| ДАТЧИК ВОЗДУШНОГО ЗАЗОРА | 2014 |
|
RU2558641C1 |
| Устройство для учета движущихся объектов | 1985 |
|
SU1278908A1 |
| ОБНАРУЖЕНИЕ СКРЫТОГО ДИЭЛЕКТРИЧЕСКОГО ОБЪЕКТА | 2011 |
|
RU2586269C2 |
| Устройство для счета движущихся объектов | 1986 |
|
SU1330647A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ДАННОГО СПОСОБА | 2005 |
|
RU2296301C1 |
| Тренажер сварщика | 1986 |
|
SU1330649A1 |
| Устройство контроля скорости | 1983 |
|
SU1111190A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ДАТЧИК ДЛЯ КОНТРОЛЯ ПЕРЕМЕЩАЕМОГО ТОНКОГО ОБЪЕКТА | 2020 |
|
RU2723971C1 |
Изобретение относится к устройствам контроля статических и динамических изменений зазора между двумя металлическими объектами. Сущность: устройство содержит передающий и приемный металлические электроды, которые расположены в одной плоскости и закреплены через диэлектрическую прокладку на первом металлическом объекте, вокруг передающего и приемного электродов в их плоскости сформирован дополнительный электрод в виде незамкнутого контура. Передающий электрод соединен с выходом генератора высокочастотных колебаний. Приемный электрод соединен с входом детектора профиля локальной области второго металлического объекта, выход которого соединен с входом детектора профиля второго металлического объекта. Выход детектора профиля соединен с входом детектора минимального расстояния. Выходы всех детекторов соединены с входом формирователя аналогового сигнала зазора. Концы дополнительного электрода соединены с входами дифференциального усилителя, выход которого соединен с входом амплитудного детектора. Технический результат: повышение достоверности измерения взаимного расположения и состояния первого и второго объектов за счет исключения краевых эффектов емкостного измерителя и контроля магнитного поля, наводящего в незамкнутом контуре ЭДС, пропорциональную величине зазора. 5 з.п. ф-лы, 5 ил.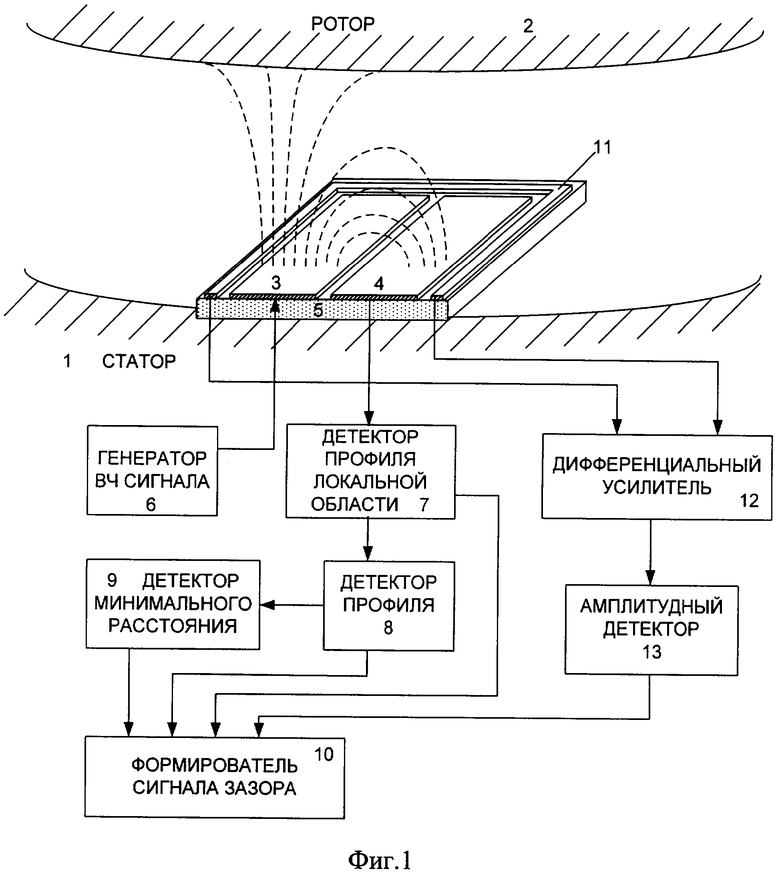
| УСТРОЙСТВО для ЁЁСКОИТАКТНОГО ИЗМЕРЕНИЯ МЙКРОГЕОМЕТРИИ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 0 |
|
SU221136A1 |
| Емкостной преобразователь биений магнитного диска | 1990 |
|
SU1776978A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 7049828 B1, 23.05.2006. | |||

