Изобретение относится к спортивным и игровым тренажерам, а также предназначено определять и способствовать развитию кондиционных (скоростных, скоростно-силовых качеств, выносливости и др.) и координационных (точность воспроизведения и дифференцирование пространственных, временных и силовых параметров движений, равновесие, быстрота и точность реагирования на изменяющуюся ситуацию, согласование движений, ориентирование в пространстве) способностей человека. Оно сочетает в себе достоинства игры и занятий на тренажерах.
Известно устройство [1], предназначенное для усиления мускулов живота на уровне талии, мышц, расположенных в задней части и ягодицах, а также всех остальных мускулов тела, включающее основание, стержень, который может перемещаться в любом направлении, один из концов которого имеет рукоятку, а другой его конец связан с основанием посредством механизма связи. Механизм связи включает шар на конце стержня, шар размещен в трубе, верхний конец которой выполнен так, чтобы соответствовать верхнему концу шара, нижний конец трубы прикреплен к основанию. Упомянутый шар может двигаться во всех направлениях в ответ на движение, придаваемое шару, в пределах места, ограниченного верхним концом трубы и частью, формирующей место для шара, установленного на основание, посредством регулировочного механизма, позволяющего регулировать трение шара.
Достоинство данного устройства состоит в том, что оно способно развивать мускулы почти всего тела человека и, в частности, усилить брюшные мускулы на уровне талии и ягодиц. Устройство занимает мало места, компактное и не очень дорогое, предлагает непрерывное сопротивление движениям стержня во всех направлениях и позволяет приспосабливаться, осуществляя трение в зависимости от положения человека, выполняющего упражнение.
Недостатками этого устройства является следующее:
- использование трения металла по металлу;
- относительно сложное построение используемого шара;
- нет возможности получения биомеханических характеристик выполняемого движения;
- нет обратной связи - ответа организма человека на выполняемое двигательное действие или на получаемую нагрузку.
Укрепляющее и оздоровительное действие физических упражнений общеизвестно. Однако при нерациональных занятиях физической культурой и спортом, то есть при несоответствии нагрузок подготовленности и индивидуальным особенностям занимающихся, возможны неблагоприятные влияния, развитие различных предпатологических состояний. Известно, что одинаковые по интенсивности и длительности нагрузки могут быть чрезмерными для одного человека и не быть таковыми для другого, столь же неоднозначными могут быть воздействия сходных по интенсивности и длительности нагрузок для одного и того же человека при его разных функциональных состояниях (ФС) [2, 3].
Приспособление к любой деятельности человека представляет собой сложный многоуровневый процесс, затрагивающий различные функциональные системы организма. В физиологическом соотношении адаптация к мышечной деятельности является системным ответом организма, направленным на достижение высокой тренированности и минимизации физиологической цены за это. С этих позиций адаптацию к физическим нагрузкам следует рассматривать как динамический процесс [4, 5] и, в первую очередь, одну из его особенностей - утомление.
Исследования в этой области показывают, что ведущую роль в развитии утомления играет кора головного мозга - наиболее утомляемый отдел центральной нервной системы [6]. Поэтому общими для утомления при различных видах деятельности являются параметры, характеризующие изменения в состоянии центральной нервной системы.
При занятиях гимнастикой, акробатикой, прыжками в воду и другими видами, требующими сложной координации движений, очень важно точное восприятие времени и пространства. Одним из распространенных индикаторов точности восприятия временных и пространственных характеристик движения является точность в реакции на движущийся объект - определение точки встречи движущегося объекта и неподвижной точки. Реакция на движущийся объект представляет собой пространственно-временной рефлекс и используется в качестве теста для определения уровня взаимоотношения процессов возбуждения и торможения в коре головного мозга. Ошибки упреждения считаются показателем преобладания возбудительного процесса, ошибки запаздывания - индикатором преобладания процесса торможения. Предполагается также, что точные реакции показывают лица с уравновешенными процессами возбуждения и торможения [7].
Наиболее близким техническим решением, выбранным в качестве прототипа, является «силовой джойстик» [8], имеющий практически все элементы электрической схемы обычного «джойстика», но сама конструкция рассчитана на приложение значительных усилий к прочному «игровому стержню», выполненному с расчетом на возможность изменения величин оказываемого сопротивления. Для этого используются спиральные рессорные пружины, закрепляемые на массивном основании. Изменение величин сопротивления усилием занимающегося обеспечивается как посредством изменения длины рычага (рабочей части «игрового стержня»), так и путем управления жесткостью спиральной пружины.
Достоинство этого технического решения заключается в том, что осуществляется управление перемещениями фигурок на экране монитора (дисплея) персонального компьютера посредством этого силового устройства, полностью выполняющего функции «Джойстика», приложением к нему дозируемого по величинам и направлениям усилий.
Наиболее близким аналогом относительно заявленного является устройство аналогичного назначения, известное из RU №2149666, А63В 21/28, содержащее силовой блок, блок программ, стержень, персональный компьютер.
Недостатком данного устройства является то, что нет возможности плавно регулировать дозированное сопротивление нагрузки в зависимости от функционального состояния занимающегося.
Задачей данного изобретения является создание равномерного дозированного сопротивления «игровому стержню» в пределах всего заданного сектора перемещения, плавная регулировка сопротивления, возможность определять и способствовать развитию кондиционных и координационных способностей человека.
Технический результат в устройстве для тренировки мышц и для определения и развития кондиционных и координационных способностей человека, содержащем силовой блок и блок программ, первый из которых имеет в своем составе игровой стержень, выполненный с возможностью изменения длины рычага - рабочей части игрового стержня и оснащенный несколькими модификациями съемных рукояток, присоединенных к одному концу игрового стержня, при этом каждая рукоятка снабжена, как минимум, двумя кнопками, предназначенными для управления функциями компьютерных игр, а вся система электрических коммуникаций игрового стержня скоммутирована через гибкий многожильный кабель на соответствующий разъем игрового стержня и подключена к порту персонального компьютера, силовой блок выполнен в виде переменного нагрузочного сопротивления, в котором другой конец игрового стержня выполнен в виде шара, размещен в стакане, образующем среду регулируемого трения для шара, обеспечиваемого с помощью стягивающего узла и двух трущихся о шар элементов, расположенных в верхней и нижней частях стакана, и, опираясь на неподвижную пластину и шар, трущиеся элементы прижаты к шару игрового стержня стягивающим узлом, образованным резиновой демпферной пластиной, подвижной пластиной и цилиндрической стяжкой, имеющей резьбу на внутренней поверхности и зубчатую шестерню на внешней боковой поверхности, для скручивания и накручивания стяжки на стакан в его верхней части по предусмотренной резьбе на боковой поверхности стакана закреплен электродвигатель реверсивного электрического привода, ось якоря которого имеет зубчатое колесо, соединенное своими зубьями с зубьями стяжки через промежуточную шестерню, причем винт в нижней части и крепежный узел в верхней части стакана препятствуют скольжению нижнего и верхнего трущихся элементов относительно указанного стакана, стяжка, подвижная пластина, резиновая демпферная пластина, трущийся элемент верхней части стакана имеют сквозные отверстия для размещения игрового стержня и его перемещений в стакане и сквозные отверстия в трущемся элементе и неподвижной пластине нижней части стакана для сканирования нижней поверхности шара игрового стержня посредством введенной оптической «мыши», закрепленной на неподвижной пластине, при этом силовой блок прикреплен к платформе, на которой стоит занимающийся, с помощью винтов, гаек или шурупов, оптическая «мышь» силового блока подключена к системному блоку персонального компьютера через интерфейс USB - Uniwersal Serial BUS, а электродвигатель реверсивного электрического привода подключен к системному блоку персонального компьютера через усилитель, элемент гальванической развязки, цифроаналоговый преобразователь и параллельный LPT-порт, через который подают также и сигнал с введенного узла выявления нулевого и максимального уровней сопротивления силового блока, при этом понижающий трансформатор, выпрямитель и источник постоянного напряжения, питающие указанный электродвигатель и электронные узлы, заземлены и, кроме того, добавлены видео и звуковой каналы, а для вывода на дисплей персонального компьютера игровой сцены с помощью трехмерной графики, где в качестве объекта управления выбрана бабочка с изменяющейся цветностью и ее движения сопровождаются подобранными музыкальными мелодиями, а блок программ создания физической нагрузки состоит из файла настройки под аппаратные средства и условия тренировки или игры, из одной динамически загружаемой библиотеки и из трех исполняемых файлов: первый исполняемый файл - основная программа создания физической нагрузки, второй исполняемый файл - настройка тренажера-игры, третий исполняемый файл - для индивидуального задания и контроля тренировки или игры, динамически загружаемая библиотека - для управления электродвигателем, кроме того, блок программ включает служебные информационно-регистрационные и математические программы и все они установлены перед работой на жестком диске системного блока персонального компьютера.
Крепежный узел выполнен в виде трубки, закрепленной внутри стакана, и вставляемого в нее стержня, закрепленного на подвижной пластине, а в резиновой демпферной пластине сделано отверстие для прохождения стержня.
Датчиком узла выявления нулевого и максимального уровней сопротивления силового блока является оптический датчик, работающий на открывание и закрывание светового потока.
Узел выявления нулевого и максимального уровней сопротивления силового блока выполнен с возможностью совместной работы с оптическим блоком персонального компьютера, в программном обеспечении которого заложена возможность слежения и запоминания количества срабатываний его датчика. Бабочка имеет возможность изменить внешний вид и размеры в зависимости от уровней сложности.
Для связи персонального компьютера с электрической схемой канала управления электродвигателем электрического привода и запитывания части его схемы через LTP-порт задействованы четыре линии регистра данных и одна линия регистров сигналов состояния, на одной микросхеме - логическом элементе 2И-НЕ выполнена схема защиты, на двух оптронных парах - гальваническая развязка и на двух тиристорах - выпрямитель, запитанный от понижающего трансформатора.
Программное обеспечение обработки информации включает: автоматический ввод и регистрацию данных, сканирование манипулятора, предварительную обработку этих сигналов, углубленную математическую обработку характеристик выполняемых спортивных упражнений.
Программы углубленной математической обработки характеристик спортивного упражнения выполнены с возможностью расчета следующих биохимических параметров: длительности всего движения и отдельных его фаз и периодов, величины перемещения и ускорения движения плечевого пояса человека, механическую работу, проделанную занимающимся за время тренировки или игры.
Предлагаемое устройство поясняется чертежами:
На фиг.1 изображено схематично устройство с узлами и элементами, их подключение к средствам вычислительной техники, представленным в виде блок-схемы, поясняющей принцип действия;
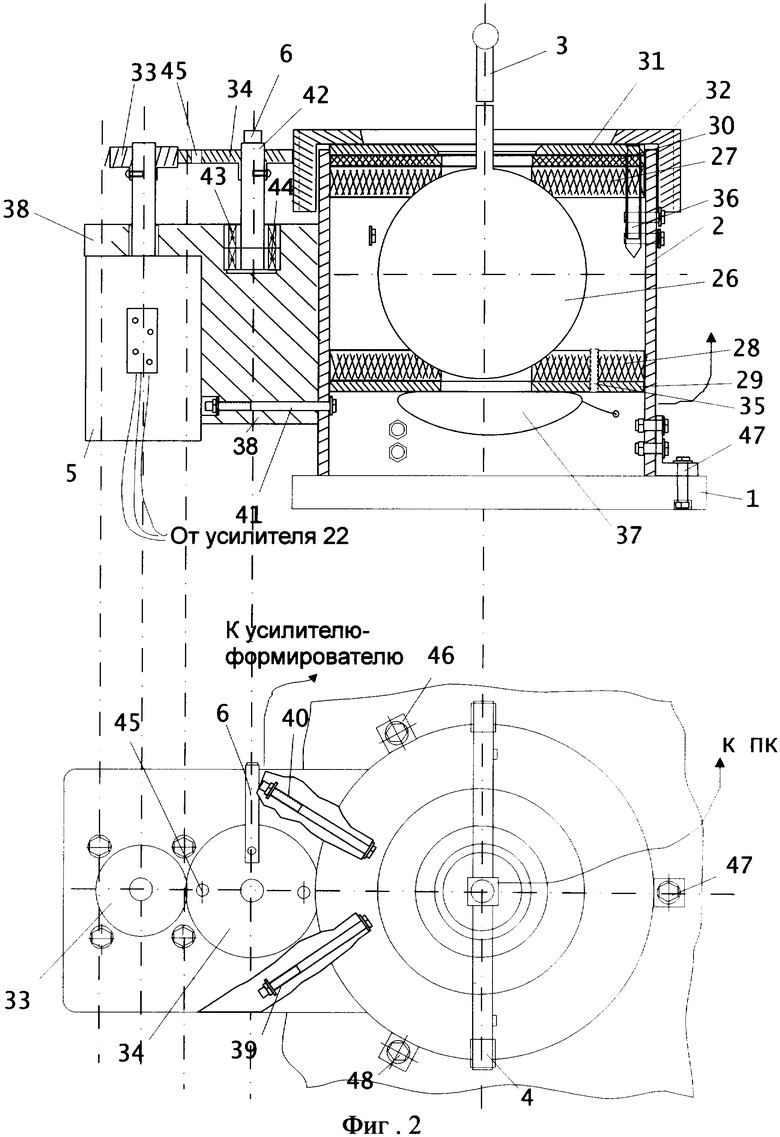
На фиг.2 - силовой блок;
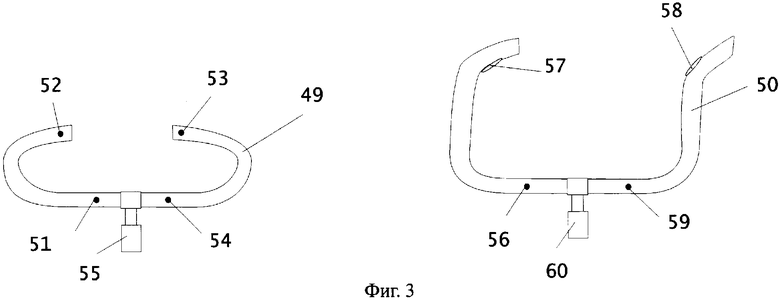
На фиг.3 представлены сменные рукоятки;
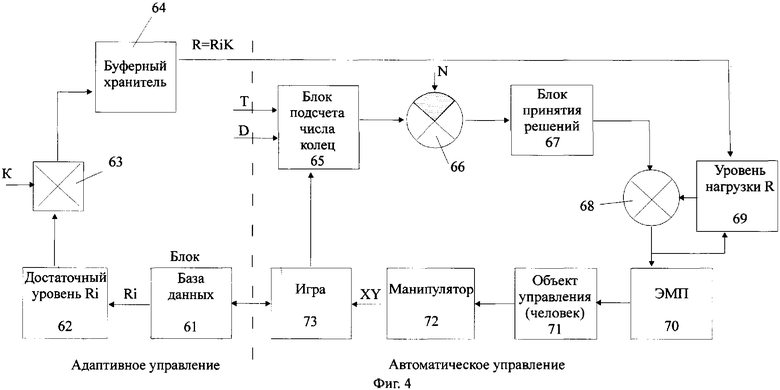
На фиг.4 - функциональная схема способа адаптивного управления величиной тренировочной нагрузки;
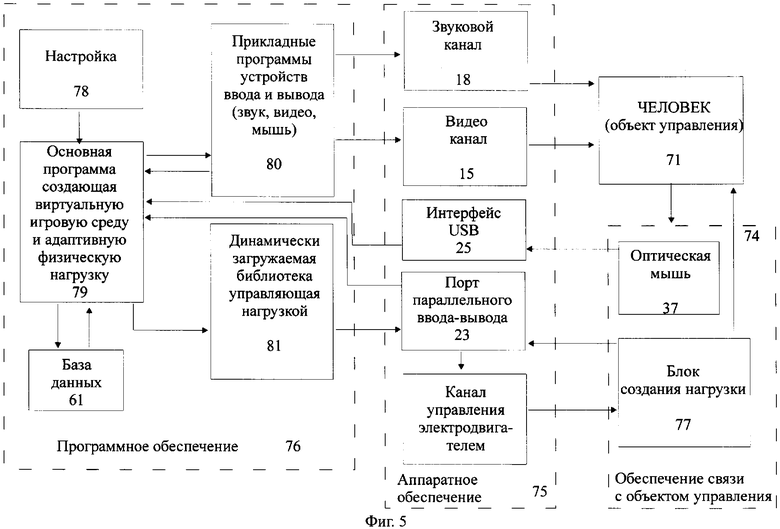
На фиг.5 - структурная схема устройства;
На фиг.6 показано программное обеспечение создания силовой нагрузки;
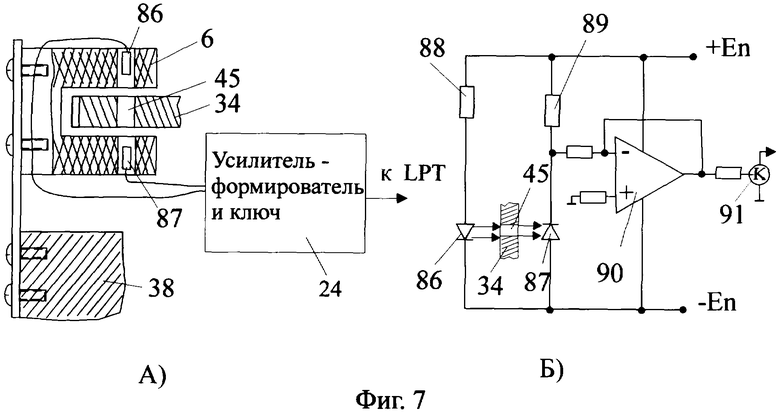
На фиг.7 представлен узел выявления нулевого и максимального уровней сопротивления силового блока.
На фиг.8 изображена электрическая схема канала управления электродвигателем.
Заявляемое устройство содержит (фиг.1) два блока: силовой блок и блок программ, три канала: звуковой, видео и канал управления электродвигателем: персональный компьютер и усилитель - формирователь узла выявления нулевого и максимального уровней сопротивления силового блока.
Силовой блок состоит: из платформы 1, на которую становится занимающийся, к ней крепятся стакан 2, в который встраивается «игровой стержень» 3 со съемной рукояткой 4 и на котором устанавливаются электродвигатель постоянного тока 5 и датчик узла выявления нулевого и максимального уровней сопротивления 6 силового блока из понижающего трансформатора 7 и из платы электронных узлов 8.
Персональный компьютер 9 содержит дисплей 10, клавиатуру 11, «мышь» 12 и системный блок 13, дисковод 14, размещенный на системном блоке 13, через который в персональный компьютер 9 вводится программное обеспечение. Дисплей 10, системный блок 13 и соответствующая часть программного обеспечения образуют видеоканал 15 устройства.
Звуковая карта 16 и звуковые колонки 17 образуют звуковой канал 18, связанный с выходом системного блока 13 и сопровождающий изображения видеоканала 15.
Канал управления электродвигателем 19 построен на цифроаналоговом преобразователе 20, элементе гальванической развязки 21, усилителе 22 и связывает LPT-порт 23 системного блока 13 с двигателем постоянного тока 5 силового блока.
Датчик узла выявления нулевого и максимального уровней сопротивления 6 силового блока соединен через усилитель 24 с LPT-портом 23 системного блока 13.
Содержимое стакана 2 связано с интерфейсом Uniwersal Serial Bus (USB) 25 системного блока 13.
Рассмотрим силовой блок подробнее (фиг.2). Он выполнен в виде переменного нагрузочного сопротивления для занимающегося, в котором другой конец «игрового стержня» 3, выполненный в виде шара 26, размещен в стакане 2, образующем среду регулируемого трения для шара 26. Эта среда обеспечивается с помощью стягивающего узла и двух трущихся о шар 26 элементов 27 и 28, расположенных в верхней и нижней частях стакана 2. Опираясь на неподвижную пластину 29 и шар 26, трущиеся элементы 27 и 28 прижимаются к шару 26 «игрового стержня» 3 стягивающим узлом, образованным резиновой демпферной пластиной 30, подвижной пластиной 31 и цилиндрической стяжкой 32. Эта стяжка имеет резьбу на внутренней поверхности и зубчатую шестерню на внешней ее боковой поверхности. Путем накручивания и скручивания стяжки 32 на стакан 2, в верхней части которого предусмотрена резьба, с помощью реверсивного электрического привода, электродвигатель 5 которого закреплен на боковой поверхности указанного стакана 2, создается и регулируется трение для шара 26. Электродвигатель 5 связан с цилиндрической стяжкой 32 следующим образом. На оси якоря электродвигателя 5 расположено зубчатое колесо 33, соединенное с зубьями цилиндрической стяжки 32 через промежуточную шестерню 34, которая передает вращение якоря электродвигателя 5 на вращение цилиндрической стяжки 32. Винт 35 в нижней части стакана 2 и крепежный узел 36 в верней части стакана 2 препятствуют скольжению нижнего 28 и верхнего 27 трущихся элементов относительно стакана 2. В верхних цилиндрической стяжке 32, подвижной пластине 31, резиновой демпферной пластине 30, трущемся элементе 27 и в нижних трущемся элементе 28 и неподвижной пластине 29 сделаны сквозные отверстия. В верхней части они нужны для размещения шара 26 «игрового стержня» 3 и его перемещений в стакане, а в нижней части стакана 2 - для сканирования нижней поверхности шара 26 «игрового стержня» 3, осуществляемого оптической «мышью» 37, закрепленной на неподвижной пластине 29. Электродвигатель 5 электропривода постоянного тока закрепляется на боковой внешней стенке стакана 2 посредством детали 38, прикрепляемой к стакану 2 тремя винтами с гайками 39, 40, 41. В этой детали закрепляется ось 42, на которой размещена промежуточная шестерня 34 с помощью двух подшипников 43 и 44. К этой же детали прикрепляется оптический узел - датчик узла выявления нулевого и максимального сопротивления уровней 6 силового блока, для работы которого в шестерне 34 имеется отверстие 45. Крепится силовой блок к платформе 1 тремя болтами с гайками или шурупами 46, 47 и 48.
Сменные рукоятки 4 могут быть разной формы, например, такие, как представленные на фиг.3 рукоятки 49, 50 соответственно. Для удобства работы с ними введены запараллеленные кнопки: для левой руки кнопки 51, 52 на рукоятке 49, для правой - кнопки 56, 57 на рукоятке 50.
Отводы от левой клавиши оптической мыши, сделанные на правую руку, кнопки 53, 54 на рукоятке 49, и 58, 59 на рукоятке 50 - отводы от правой клавиши. На обеих рукоятках соединительные провода выведены на миниатюрный разъем 55 на рукоятке 49 и 60 - на рукоятке 50.
Напряжение 220 В подается на понижающий трансформатор 7 (см. фиг.1) и персональный компьютер 9. В персональном компьютере его изготовитель принял необходимые меры безопасности от поражения электрическим током. Понижающий трансформатор 7, выпрямитель и источник переменного напряжения, питающие указанный электродвигатель 5 и электронные узлы - плату 8, надежно заизолированы и заземлены.
Прежде чем описать, как работает устройство, разберемся в примененном способе адаптивного управления.
Виртуальный объект управления - бабочка, ее движения на экране дисплея. Направление ее полета изменяется движением силового манипулятора. Скорость полета задается в настройках и может быть постоянной или зависеть от уровня сложности задания. В зависимости от уровня сложности бабочка меняет внешний вид, поддерживая интерес занимающегося к игре.
Перед занимающимся игроком ставится задача - за заданный промежуток времени провести бабочку через как можно больше число колец, возникающих в случайных местах игрового пространства. Число колец, через которые игрок проводит бабочку в единицу времени, будем называть скоростью прохождения колец. Эта скорость является критерием, по которому ведется оценка психофизического состояния игрока
В случайном месте игрового пространства возникает кольцо. При полете бабочки через кольцо оно исчезает и появляется новое на заданном в настройках расстоянии от предыдущего. Сюда же на экран выводятся: 1) номер уровня сложности; 2) число колец, пройденных за последнее время; 3) время игры - тренировки в минутах и секундах.
Уровень сложности напрямую связан с физической нагрузкой и меняется по результатам игры (зависит от скорости прохождения бабочками колец) с учетом физической подготовленности и реакции занимающегося и его двигательного опыта. Занимающийся испытывает нагрузку, управляя игрой посредством силового «джойстика».
Цель управления нагрузкой состоит в том, чтобы поддерживать постоянную скорость, задаваемую педагогом или инженером-исследователем. В качестве критерия оптимальности управления выбрано отличие фактической скорости от заданной (чем меньше отличие, тем лучше). Отличие скорости определяется численным интегрированием модуля разности скоростей по времени после тренировки (игры). При проведении серии испытаний на тренажере-игре подбирают коэффициенты, дающие наименьшее отличие скорости.
Требуемая скорость прохода колец задается в трех константах: 1) требуемым числом колец N, 2) интервалом времени подсчета колец Т (рассчитываемым по индивидуально заданной скорости), 3) контрольным промежутком времени D.
Подсчитываются только те кольца, которые были пройдены не позднее заданного интервала времени Т (например, число колец, пройденных за последние 15 секунд). Если во время игры число пройденных колец равно числу N, заданному в настройках, то уровень не меняется. Если число колец меньше N, то уровень уменьшается, если больше N - возрастает. Изменение уровня происходит не сразу, а через заданный в настройках игры промежуток времени D, и только в том случае, если за этот промежуток времени D игрок не вернулся к исходному числу колец N, при котором изменение нагрузки не требовалось. Это сделано для того, чтобы нагрузка не менялась сразу, как только изменилось число колец, так как кратковременное изменение числа колец (при пролете через очередное кольцо или выход первого кольца за интервал времени подсчета колец) - это нормальный режим работы устройства. Нагрузку следует изменить только в том случае, если число колец не равно заданному в настройках числу N в течение длительного (около 2Т) интервала времени D.
Система управления изображена на фиг.4 в виде функциональной схемы способа адаптивного управления величиной тренировочной нагрузки в условиях заявляемого устройства.
При настройке устройства задается коэффициент К, пропорционально которому будет изменяться нагрузка в начале каждого нового подхода относительно достигнутой ее величины в конце предыдущего подхода. Величина нагрузки, достигнутой в конце предыдущего подхода, извлекается из блока базы данных 61 в соответствии с регистрационными данными занимающихся. Полученная величина нагрузки (R) поступает во временное хранилище достигнутого уровня нагрузки 62, откуда будет извлекаться в момент, когда требуется изменение нагрузки, умноженное перемножителем 63 на коэффициент К. Величина нагрузки R=Ri×К заносится в буферный хранитель 64. Эта величина нагрузки R используется в качестве настроечного параметра для системы автоматического управления. Описанный контур образует контур управления верхнего (второго) уровня, благодаря которому устройство работает в адаптивном режиме. Этот цикл управления активизируется в начале каждого подхода.
На первом (нижнем) уровне системы автоматического управления происходит подсчет числа колец блока 65 за определенный промежуток времени Т в течение заданного интервала времени D. Из полученного числа колец в схеме вычитания 66 вычитается число колец N, заданное настройкой устройства. Разность поступает на блок принятия решения 67, где делается вывод увеличить, уменьшить или оставить прежней нагрузку на силовом манипуляторе. Выходное значение этого блока может быть трех видов: «+1», «0», «-1». Оно поступает на суммирующий блок 68, где происходит изменение нагрузки на один шаг в сторону уменьшения или увеличения либо такового не происходит. Получившееся значение нагрузки поступает во временное хранилище 69 и на вход управления электромеханического привода 70. Временное хранилище 69 «запоминает» новое значение нагрузки R и выдает его при следующей операции суммирования. Электромеханический привод 70 устанавливает и поддерживает поданную на его управляющий вход величину механического сопротивления. Объект управления - человек 71 воздействует на манипулятор (блок сбора информации) 72, входящий в состав устройства. Двигательные действия, выполняемые на силовом манипуляторе, воздействуют на игру 73 и фиксируются в блоке базы данных 61. При этом величина количества пройденных колец поступает в блок подсчета числа колец 65. Данный контур образует контур системы автоматического управления. Выходным параметром контура по окончании подхода становится достигнутый уровень нагрузки Ri.
Психологами доказано, что первой у человека утомляется кора больших полушарий. У каждого человека это происходит индивидуально. Поэтому скорость прохождения колец индивидуальна для каждого человека и будет неправильным задавать общую для всех величину скорости прохождения колец. Необходимо определять величину скорости индивидуально для каждого человека, лучше всего в условиях игры или во время тренировки. Кроме того, само устройство адаптируется индивидуально под занимающегося, под его способности.
Педагог или инженер-исследователь может задать требуемую величину скорости прохождения колец индивидуально для каждого занимающегося, основываясь на своем опыте и рекомендациях системы автоматического управления устройства. Основным измеренным результатом тренировки, используемым для принятия решения с требуемой индивидуальной величиной скорости прохождения колец, является максимальная скорость прохождения колец. Эта скорость определяется после каждого занятия делением числа пройденных колец на время тренировки. Максимальный результат сохраняется. Таким образом, в блоке базы данных 61 для каждого занимающегося хранится максимальная и требуемая величина скорости прохождения колец. Если требуемая величина скорости будет больше максимальной для данного занимающегося, то он не сможет подняться выше нулевого уровня. Поэтому необходимо, чтобы требуемая величина скорости прохождения колец была меньше максимальной скорости для данного занимающегося.
Описанный способ может быть реализован в устройстве, структурная схема которого представлена на фиг.5. Устройство содержит три структурных блока: 1) обеспечение связи с объектом управления (человеком) 74, 2) аппаратное обеспечение 75 и 3) программное обеспечение 76. Каждый блок выделен пунктирно.
Первый структурный блок 74 описан подробно ранее. Человек 71 воздействует на оптическую «мышь» 37, испытывая нагрузку, создаваемую в блоке создания нагрузки 77. Второй структурный блок аппаратного обеспечения 75 передает сигналы и команды, вызываемые и получаемые структурным блоком программного обеспечения 76. Это касается звукового канала 18, видеоканала 15, канала управления электродвигателем 19, интерфейса USB 25 и LPT-порта 23. Структурный блок программного обеспечения 76 управляет работой всего устройства. С помощью блока настройки 78 обеспечивается его настройка перед началом и в процессе работы. Основная программа 79 создает виртуальную игровую или тренировочную среду, адаптивную физическую нагрузку и руководит прикладными программами 80 видео и звукового каналов и динамически загружаемой библиотеки 81, управляющей нагрузкой. Блок базы данных 61 позволяет реализовать основную программу 79.
Рассмотрим программное обеспечение создания физической нагрузки. Программа имеет (фиг.6) файл с настройками 82 под аппаратные средства и условия тренировки или игры и программу настройки устройства 83, образующие блок настройки 78. Программный продукт состоит из трех исполняемых файлов и одной динамически загружаемой библиотеки. Первый исполняемый файл 79 - это основная программа устройства, где регистрируются занимающиеся и обеспечивается процесс игры или тренировки. Второй файл 83 (программа настройки) настраивает устройство, уменьшая возможность ошибки в настройке, поскольку осуществляется через файл с настройками 82. Третий файл 84 используется для индивидуального задания требуемой скорости прохождения колец и ведения педагогом или тренером 85 педагогического контроля тренировки (показано пунктиром). Динамически загружаемая библиотека 81 управляет электродвигателем силового манипулятора 72, который регулирует физическую нагрузку, испытываемую человеком 71 во время игры или тренировки (показано также пунктиром).
Изменение угла наклона «игрового стержня» 3 (см. фиг.2) фиксируется программой как смещение оптической «мышки» 37.
Суммируются движения в положительном и отрицательном направлениях отдельно. Суммируется общий путь, пройденный рукояткой «джойстика». На его основе с учетом нагрузки в дальнейшем можно определить механическую работу, совершаемую занимающимся во время игры или тренировки на устройстве. Для этого необходимо умножить путь, пройденный рукояткой «джойстика», на соответствующую создаваемую нагрузочным сопротивлением силу сопротивления.
Другие накапливаемые показатели (время пребывания на уровне, изменение уровней, пути, пройденные на каждой оси в двух направлениях) могут быть полезны для ведения педагогического контроля занятий.
Видеоканал 15 (см. фиг.5) участвует в игре или в выполнении тренировочного задания непосредственно, а звуковой канал 18 участвует, в основном, в сопровождении игры или тренировки, но он необходим для стимулирования интереса занимающихся.
Для вывода игровой сцены на дисплей 10 (см. фиг.1) используется качественная трехмерная графика, где в качестве объекта управления выбрана бабочка. Над квадратной площадкой, покрытой текстурой травы и качающимися ромашками, в ограниченном пространстве внутри невидимого куба летит объект управления (бабочка). Вокруг куба - облака и неподалеку большая радуга. По траве ползают божьи коровки. Над ромашками летают и иногда садятся на них другие бабочки.
Детализация. Количество деталей игрового или тренировочного пространства (ромашки, божьи коровки, бабочки) не влияет на игровую или тренировочную ситуацию, но повышают визуальное качество игры и системные требования: если 0, то минимальная детализация, минимальные системные требования, если 100, то максимальная детализация и большие системные требования, но выше качество.
Изменение внешнего вида бабочки. В игре или тренировке заданы номера бабочек и соответствующие им уровни, начиная с которых бабочка принимает новый внешний вид.
Кольца. Задаются размеры колец, расстояние до следующего кольца и поле для управления отображением следующего кольца.
Настройка камеры. В настройках камеры задают скорость движения камеры. Камера привязана к объекту управления (бабочке) не жестко, при движении объекта камера отстает. Это выглядит более естественно. Чем больше число, тем жестче камера привязана к объекту управления (бабочке). Задаваемый угол наклона - это угол, под которым камера возвышается над бабочкой. Камера может подстраивать свою скорость автоматически под скорость бабочки. Это может быть полезно при скорости игры или тренировки, зависящей от уровня.
Работают с устройством следующим образом.
В начале занятия из блока базы данных 61 для занимающегося, который будет играть или тренироваться, выбираются все необходимые данные и загружается соответствующий им уровень нагрузки. Педагог или тренер производят все настройки до начала выполнения двигательных действий в тренировке (настройку графики при необходимости можно производить в любое время). Настройка игры и тренировки производится под возможность компьютера (скорость процессора, звуковая карта и видеокарты в настройках графики и звукового блока) и под имеющийся силовой манипулятор (чувствительность управления, время задержки при смене уровней и др.), а также с учетом оптимальных условий игры или тренировки (скорость течения времени, размеры бабочки и кольца и др.). Устанавливают следующие настройки: продолжительность игры или тренировки, интервал времени подсчета колец, требуемое количество колец, скорость (постоянная или переменная).
Перед игрой или тренировкой надо сначала выставить нулевой уровень. Дело в том, что в заявляемом устройстве задание нагрузки производится вращением стяжки 32 (см. фиг.2) по резьбе стакана 2 под воздействием на стяжку 32 промежуточной шестерни 34, которая передает вращение вала якоря электродвигателя 5 через зубчатое кольцо 33. Перемещение стяжки 32 отслеживается программно. Оптический датчик 6 через отверстие 45 фиксирует количество полных оборотов или полуоборотов зубчатого колеса 34, и компьютер, получив сигнал от датчика 6 и усилителя-формирователя 24 (см. фиг.1), запоминает это количество полуоборотов или полных оборотов. Чтобы выйти на нулевой уровень, подается управляющий сигнал «вверх» и якорь двигателя начинает вращаться, перемещая стяжку 32 (см. фиг.2) до тех пор, пока не вернет ее в верхнее исходное положение, сохраненное памятью компьютера. Это необходимо для того, чтобы точно задавать нагрузку, так как нет датчика, определяющего промежуточное положение стяжки 32. После многократного изменения уровня нагрузки невозможно определить точное положение стяжки 32. Поэтому перед каждым занятием стяжку 32 переводят в крайнее необходимое верхнее положение, соответствующее уровню 0, от которого рассчитываются и устанавливаются все остальные уровни нагрузки. Во время изменения нагрузки и при смене уровня сложности на двигатель подается напряжение.
После всех необходимых настроек и установок устройство готово к работе. Занимающийся становится на платформу 1 (см. фиг.1), берется обеими руками за поручни рукоятки 4, смотрит на дисплей 10, на экране которого картинки игрового пространства: бабочка, положение которой определяется «игровым стержнем» 3, и кольцо, местоположение которого держится заданное время. Задача занимающегося - провести бабочку через это кольцо за заданное время, так как вслед за этим кольцом оно появляется в другом неизвестном заранее месте игрового пространства. Если занимающийся укладывается в выделенное время, нагрузка не меняется. Если занимающийся опережает, нагрузка через некоторое время увеличивается. Если он отстает, нагрузка через некоторое время уменьшается. Это происходит следующим образом. Компьютер анализирует поступающую информацию. В случае опережения или отставания компьютер посылает через LTP-порт команду на цифроаналоговый преобразователь (ЦАП) 20, которая, пройдя через элемент гальванической развязки 21 и усилившись усилителем 22, поступает на электродвигатель 5 и изменяет уровень нагрузки в нужном направлении. Звуковой канал 18, состоящий из звуковой карты 16 и колонок 17, помогает занимающемуся выполнять двигательные действия.
Несмотря на кажущуюся простоту, это довольно сложное двигательное действие, так как здесь участвуют разные мышечные группы и интеллектуальные возможности и способности человека: реакция на изображение на экране дисплея, быстрота и точность реагирования на изменение ситуации путем перемещения «игрового стержня».
В случае игры выигрывает тот занимающийся, который при более высоком уровне нагрузки проводит заданное количество бабочек через кольцо. В случае тренировки наиболее интенсивно занимающимся считается тот, кто провел заданное количество бабочек через кольца при высоком уровне нагрузки.
Работая на данном устройстве, занимающийся постепенно развивается физически, воздействуя на различные группы мышц, и интеллектуально, развивая реакцию и укрепляя нервную систему, совместно со зрительным и музыкальным центрами.
Важной характеристикой является уровень нагрузки, который определяется положением стяжки 32 (см. фиг.2). Прямое измерение возможно, но затруднительно. Проще об уровне ее судить, например, по вращению промежуточной шестерни 34 с использованием программных средств персонального компьютера 9 и узла выявления нулевого и максимального уровней сопротивления 6 силового блока. Рассмотрим состав и принцип действия этого узла. Узел содержит (см. фиг.7а) оптический датчик 6, в котором светоизлучательный элемент 86 и световоспринимающий элемент (светодиод) 87 расположены на одной линии друг относительно друга, обеспечивающей засвечивание световоспринимающего элемента 87 только при нахождении отверстия 45 в шестерне 34 между ними. Это выполнено механически в виде колодочки 6, где соответствующим образом просверлены два канальца, в которых размещены указанные элементы. Эти элементы электрически связаны с усилителем-формирователем 24 и подключены к LPT-порту 23.
На фиг.7б показана одна из возможных электрических схем данного узла. Излучающий элемент 86 включен в прямом направлении. Ток через него задается резистором 88. Световоспринимающий элемент (светодиод) 87 включен в обратном направлении и ток через него в освещенном состоянии задается резистором 89. Изменение потенциала в темновом и световом состоянии точки соединения резистора 89 и световопринимающего элемента 87 воспринимается усилителем-формирователем 90, коллектор выходного ключевого транзистора 91 подключен к LPT-порту 23.
Работа узла выявления нулевого и максимального уровней, содержащего датчик 6 и усилитель-формирователь, осуществляется следующим образом. При вращении промежуточной шестерни 34 световое окно 45 в ней периодически оказывается между светочувствительным элементом 87 и светоизлучающим элементом 86, на которое она реагирует скачкообразным изменением потенциала на входе усилителя-формирователя 90 и транзистора 91, сопротивление которого уменьшается. Этот сигнал передается через LPT-порт в системный блок 13 персонального компьютера 9 (см. фиг.1).
Ранее в обобщенном виде был описан канал управления электродвигателем. Рассмотрим одну из возможных конкретных электрических схем данного канала (фиг.8). Сигналы управления, сформированные по результатам игры или тренировки, выводятся через параллельный LPT-порт 23 персонального компьютера 9.
Для связи персонального компьютера 9 с конкретной электрической схемой канала управления электродвигателя (в дальнейшем - схемой управления) и запитывания части его схемы через LPT-порт 23 задействованы четыре линии регистра данных Data 0 Data 3, соответственно 92, 93, 94, 95, и одна линия регистров сигналов состояния Selekt 96. Электробезопасность всего устройства обеспечивается применением надежного «заземления» всех ее аппаратных частей, а электробезопасность персонального компьютера 9 (см. фиг.1) обеспечена применением гальванической развязки 21 в канале управления электродвигателем.
Управляющие сигналы, выработанные программой, по линиям Data 0 (92) Data 2 (93) подаются на входы логических элементов DD 1.1 - DD 1.3, соответственно 97, 98, 99, микросхемы DD 1. Данные логические элементы реализуют схему защиты выходных цепей схемы управления от перегрузки по току в случае одновременной подачи управляющих сигналов сразу на оба входа схемы управления. Такая ситуация возникает, например, при включении питания персонального компьютера 9, когда происходит стандартная инициализация параллельного LTP-порта 23. Из таблицы истинности работы данного узла схемы управления следует, что в случае подачи управляющего сигнала (лог.1) только на один из входов на выходе соответствующего логического элемента установится уровень логического 0, который «соединяет» микромощную лампу накаливания от оптопары (U1 или U2, 100 или 101 соответственно) с общим проводом.
Сопротивление резистора (102 или 103), входящего в соответствующую оптопару, уменьшится, что приведет к замыканию цепи управляющего электрода этого тиристора (104 или 105). Таким образом, на электродвигатель 5 поступает питающее напряжение, полярность которого зависит от управляющего сигнала, его якорь приходит во вращение и нагрузка на устройстве возрастает или убывает в зависимости от полярности поданного на электродвигатель 5 напряжения. Тиристор будет находиться в открытом состоянии до тех пор, пока не будет снят управляющий сигнал. Как только управляющий сигнал будет снят, тиристор отключит электродвигатель от источника питания и изменение нагрузки прекратится. Направление электрического тока в цепи якоря электродвигателя меняется в зависимости от того, какой тиристор включен - 104 (US1) или 105 (US2), то есть при смене управляющего сигнала. Если нагрузка не меняется, то снимается напряжение с Data 2 и тогда оптопары 100 и 101 будут обесточены и тиристоры 104 и 105 не будут работать. Выпрямление пониженного трансформатором 7 сетевого напряжения 220 В (или 127 В) осуществляется непосредственно одним из двух тиристоров. При таком выпрямлении происходит срез половины волны. В схеме нет сглаживающего конденсатора, форма тока, питающего через тиристорные ключи электродвигатель 5, имеет импульсный характер с частотой сетевого напряжения. Это приводит к периодическому выключению и включению питания тиристора и электродвигателя с той же частотой. Ввиду того, что эта частота велика - 50 (60) Гц - по сравнению с инерционностью электродвигателя, на работе устройства это не сказывается. Напротив, при снятии управляющего сигнала тиристор не может выключиться сразу, этот процесс происходит лишь при переходе сетевого напряжения от одной полуволны к другой.
В схеме управления, например, используются микромощные оптопары ОП-13, микросхема К555 ЛАЗ с малым током энергопотребления, поэтому эту часть схемы стало возможным питать непосредственно от параллельного LPT-порта персонального компьютера через линии Data 2. Тем самым в устройстве реализуется гальваническая развязка цепей компьютера и электродвигателя, что повышает электробезопасность устройства.
В блоке программ, кроме ранее рассмотренной части программ создания физической нагрузки, программное обеспечение условно можно разделить еще на три группы: 1) служебные и тестовые программы; 2) информационно-регистрационные; 3) математические для углубленной обработки характеристик спортивного упражнения.
Служебные и тестовые программы обеспечивают работу системного блока 13 персонального компьютера 9 и проверку его правильной работоспособности.
Регистрационные и информационные программы обеспечивают обработку информации, автоматический ее ввод и регистрацию данных, предварительную обработку сигналов, тарировку входных сигналов, запоминание и вывод графического изображения входных сигналов, первичную математическую обработку характеристик выполняемых спортивных и двигательных действий.
Углубленная математическая обработка характеристик упражнения обеспечивается программами, которые позволяют выполнять расчет следующих биомеханических параметров: длительность всего движения и отдельных его фаз и периодов, величины перемещения, скорости и ускорения, движения плечевого пояса занимающегося, механическую работу, проделанную занимающимся во время тренировки или игры.
По сравнению с прототипом предлагаемое устройство позволяет создавать равномерное дозированное сопротивление «игровому стержню» в пределах всего заданного сектора его перемещения, обеспечивать плавную регулировку величины этого сопротивления, возможность определять и способствовать развитию кондиционных и координационных способностей человека и автоматическое подстраивание нагрузки в зависимости от функционального состояния человека.
Возможность регистрировать, запоминать и выдавать по запросу зарегистрированное двигательное действие или какую-нибудь его часть в реальном масштабе времени, контролировать и выдавать необходимые рекомендации для устранения ошибок, прослеживать и контролировать тренировочный или игровой процесс в статике и динамике способствует повышению эффективности тренировки и развитию кондиционных и координационных способностей человека.
Источники информации
1. Патент США №4248727, МПК А63В 21/22.
2. Спортивная медицина: Руководство для врачей / Под ред. А.В.Чочовадзе, Л.В.Бутченко. - М.: Медицина, 1984. - 384 с.
3. Илюхина В.А., Заболотских Н.Б. Физиологические основы различий устойчивости организма к субмаксимальной физической нагрузке до отказа у здоровых лиц молодого возраста // Физиология человека. - 2000. - Т.26, №23. - С.92-97.
4. Меерсон Ф.З., Пшеничникова М.Г. Адаптация к стрессорным ситуациям и физическим нагрузкам. - М.: Медицина, 1988. - 254 с.
5. Солодков А.С. Адаптация в спорте: состояние, проблемы, перспективы // Физиология человека. - 2000. - Т.26, №6. - С.87-93.
6. Розенблат В.В. Проблема утомления. - М.: Медицина, 1975. - 240 с.
7. Полевщиков М.М., Роженцов В.В. Мониторинг функционального состояния организма человека психологическими методами // Материалы всерос. научн.-практ. конф. «Физическая культура и спорт как один из факторов безопасности в условиях Северного Кавказа». - Нальчик, 2004. - С.108-110.
8. Перспективы управления процессом силовых взаимодействий человека с объектами среды в режимах компьютерных игр / Ю.Т.Черкесов, И.П.Ратов и др. // Наука - Адыгее: Материалы научн.-практ. конф. ученых Адыгеи. - Майкоп, 1994. - С.170-174.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ И ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗВИТИЯ КОНДИЦИОННЫХ И КООРДИНАЦИОННЫХ СПОСОБНОСТЕЙ ЧЕЛОВЕКА | 2010 |
|
RU2438742C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ И ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗВИТИЯ КОНДИЦИОННЫХ И КООРДИНАЦИОННЫХ СПОСОБНОСТЕЙ ЧЕЛОВЕКА | 2007 |
|
RU2349359C2 |
| УСТРОЙСТВО С ЭЛЕКТРОПРИВОДОМ ДЛЯ ТРЕНИРОВКИ МЫШЦ | 2006 |
|
RU2335319C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2010 |
|
RU2479254C2 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ ЧЕЛОВЕКА | 2004 |
|
RU2283619C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 2010 |
|
RU2425704C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 2003 |
|
RU2266768C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 2006 |
|
RU2329844C1 |
| УСТРОЙСТВО ШИРОКОДИАПАЗОННОЕ ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА НА МОТИВАЦИОННОЙ ОСНОВЕ | 2009 |
|
RU2402269C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2006 |
|
RU2319217C1 |


Устройство для тренировки мышц и для определения и развития кондиционных и координационных способностей человека содержит силовой блок и блок программ, первый из которых имеет в своем составе игровой стержень, который выполнен с возможностью изменения длины рычага - рабочей части игрового стержня и оснащен несколькими модификациями съемных рукояток, которые присоединены к одному концу игрового стержня, при этом каждая рукоятка снабжена, как минимум, двумя кнопками, которые предназначены для управления функциями компьютерных игр, а вся система электрических коммуникаций игрового стержня скоммутирована через гибкий многожильный кабель на соответствующий разъем игрового стержня и подключена к порту персонального компьютера, силовой блок выполнен в виде переменного нагрузочного сопротивления, в котором другой конец игрового стержня выполнен в виде шара, размещен в стакане, образующем среду регулируемого трения для шара, обеспечиваемого с помощью стягивающего узла и двух трущихся о шар элементов, расположенных в верхней и нижней частях стакана, и, опираясь на неподвижную пластину и шар, трущиеся элементы прижаты к шару игрового стержня стягивающим узлом, который образован резиновой демпферной пластиной, подвижной пластиной и цилиндрической стяжкой, имеющей резьбу на внутренней поверхности и зубчатую шестерню на внешней боковой поверхности, для скручивания и накручивания стяжки на стакан в его верхней части по предусмотренной резьбе на боковой поверхности стакана закреплен электродвигатель реверсивного электрического привода, ось якоря которого имеет зубчатое колесо, соединенное своими зубьями с зубьями стяжки через промежуточную шестерню, причем винт в нижней части и крепежный узел в верхней части стакана препятствуют скольжению нижнего и верхнего трущихся элементов относительно указанного стакана, стяжка, подвижная пластина, резиновая демпферная пластина, трущийся элемент верхней части стакана имеют сквозные отверстия для размещения игрового стержня и его перемещений в стакане и сквозные отверстия в трущемся элементе и неподвижной пластине нижней части стакана для сканирования нижней поверхности шара игрового стержня посредством введенной оптической «мыши», закрепленной на неподвижной пластине, при этом силовой блок прикреплен к платформе, на которой стоит занимающийся с помощью винтов, гаек или шурупов, оптическая «мышь» силового блока подключена к системному блоку персонального компьютера через интерфейс USB - Uniwersal Serial BUS, а электродвигатель реверсивного электрического привода подключен к системному блоку персонального компьютера через усилитель, элемент гальванической развязки, цифроаналоговый преобразователь и параллельный LPT-порт, через который подают также и сигнал с введенного узла выявления нулевого и максимального уровней сопротивления силового блока, при этом понижающий трансформатор, выпрямитель и источник постоянного напряжения, питающие указанный электродвигатель и электронные узлы, заземлены, и, кроме того, добавлены видео и звуковой каналы, а для вывода на дисплей персонального компьютера игровой сцены с помощью трехмерной графики, где в качестве объекта управления выбрана бабочка с изменяющейся цветностью и ее движения сопровождаются подобранными музыкальными мелодиями, а блок программ создания физической нагрузки состоит из файла настройки под аппаратные средства и условия тренировки или игры, из одной динамически загружаемой библиотеки и из трех исполняемых файлов: первый исполняемый файл - основная программа создания физической нагрузки, второй исполняемый файл - настройка тренажера-игры, третий исполняемый файл - для индивидуального задания и контроля тренировки или игры, динамически загружаемая библиотека - для управления электродвигателем, кроме того, блок программ включает служебные информационно-регистрационные и математические программы и все они установлены перед работой на жестком диске системного блока персонального компьютера. Использование данного изобретения позволяет обеспечить создание равномерного дозированного сопротивления игровому стержню и плавную регулировку величины этого сопротивления. 7 з.п. ф-лы, 8 ил., 1 табл.
| СПОСОБ ДИСТАНЦИОННОГО ПРОВЕДЕНИЯ ПРОТИВОБОРСТВА РУК СОПЕРНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2149666C1 |
| Устройство для тренировки спортсменов | 1987 |
|
SU1480827A1 |
| СПОСОБ ЗАЩИТЫ ЭЛЕКТРОМАГНИТНЫХ ИЗЛУЧЕНИЙ ОТ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2001 |
|
RU2190303C1 |
| US 5458554 A, 17.10.1995 | |||
| US 6676570 B2, 13.01.2004. | |||

