Изобретение относится к устройству для имитации родов для воспроизведения методов дородового лечения и для моделирования избранных ситуаций при родовом акте.
Подготовка акушерок и гинекологов стоит очень дорого, а сами беременные по разным причинам в очень ограниченной степени могут выполнять необходимые приемы или использовать медицинские инструменты (например отсасывающие банки). Именно в сложных, экстренных ситуациях невозможно или недопустимо с этической точки зрения привлекать к родовспоможению неопытных лиц. Кроме того, часто имеют место различные непредвиденные проблемные случаи. Так, акушерки и гинекологи должны присутствовать при родах и в течение долгого времени быть относительно пассивными. Только тогда, когда пассивная подготовка уже далеко шагнула вперед, можно начать активную подготовку. При этом все действия опытных медицинских специалистов должны находиться под контролем, с тем чтобы свести к минимуму риск для матери и ребенка.
Для поддержки подготовки в области гинекологии до сих пор используются физические модели, фильмы и компьютерная анимация. Имеются составные твердые пластические модели, допускающие наглядный показ в пространственном отношении анатомических, физиологических или патологических связей. Помимо этого, известны мягкие эластичные модели, которые должны как можно лучше имитировать человеческие хватательные свойства, т.е. в утробе матери находится способная деформироваться детская кукла.
Проходящие подготовку акушерки и гинекологи могут, таким образом, взять модель и тренировать определенные приемы и определить пространственные связи, например положение ребенка.
Так как физические модели, фильмы или компьютерные анимации, известные из уровня техники, недостаточно подходят для подготовки, приближенной к реальности, задачей изобретения является создание устройства для имитации методов дородового лечения и для моделирования избранных ситуаций при родовом акте, с тем чтобы можно было значительно более эффективно изучить и отработать необходимые приемы. Это устройство должно быть обозначено в дальнейшем только как устройство для имитации родов.
Эта задача решается при помощи устройства для имитации родов согласно п.1 формулы изобретения.
Материнская утроба, выполненная предпочтительно из мягкой эластичной пластмассы или другого материала с аналогичными свойствами и имеющая форму и прочность и тем самым хватательные свойства естественного человеческого тела, имеет полость матки из эластичного резинового материала. Полость матки выполнена таким образом, что в нее можно поместить модель ребенка из мягкой эластичной пластмассы, причем по форме, размерам и положению полость матки и модель ребенка соответствуют естественным. Согласно изобретению модель ребенка соединена механическим способом при помощи соединительного устройства с моторным приводом. Помимо этого предусмотрено программируемое устройство управления и регулировки для управления механическим приводом, так что модель ребенка выполнена с возможностью движения согласно свободно программируемой характеристике движения в полости матки или с возможностью выхода из полости матки через родовые пути.
Преимущество изобретения заключается в том, что создана возможность обыгрывания различных медицинских ситуаций, т.е. процессов, протекающих до и во время родов, с помощью движущейся человеческой модели, которую можно потрогать. Модель можно взять в руки, чтобы, например, почувствовать, как ребенок выходит через родовые пути. Также можно правильно применить инструменты, например щипцы или отсасывающую банку. Особое значение заключается в том, что имеется возможность задать другую медицинскую ситуацию путем изменения программы, т.е. при помощи «нажатия кнопки».
Согласно п.2 формулы изобретения модель ребенка соединена с несколькими управляемыми механическими приводами, так что имеется возможность имитации сложных движений ребенка, которые в значительной степени соответствуют естественным движениям ребенка. Различные приводы можно объединить также предпочтительно в многошарнирном роботе.
Далее дополнительно предусмотрено сенсорное устройство для определения сил и движений и программа для имитации ответной реакции на применение силы и движения. Если, например, лицо, проводящее обследование, нажимает на туловище, где находится утроба матери, или прямо руками берет модель ребенка или захватывает медицинским инструментом, то чувствительные элементы сенсорного устройства измеряют применяемые при этом силы. Специалисту ясно, что одновременно можно напрямую или опосредовано определить также направления этих сил. Чувствительные элементы расположены на соединительном устройстве и/или на приводных элементах. В вычислителе устройства управления и регулировки реализуется программа имитации, в результате чего сигналы измерений преобразуются в сигналы ответной реакции на применение силы и движения. Эти сигналы ответной реакции на применяемые силы и движения поступают в устройство управления и регулировки, которое управляет приводными элементами таким образом, что модель ребенка при характерном приложении силы каким-либо лицом движется при помощи приводных элементов так, что реагирует, совершая адекватные движения, соответствующие естественным движениям ребенка в соответствующей медицинской ситуации. Акушерке или обучаемому лицу передается, таким образом, ощущение «живого» ребенка. Таким образом, впервые стали возможными абсолютно новые методы подготовки в области патронажа беременных и родовспоможения. Только в результате изменения программы, т.е. при помощи нажатия кнопки, можно моделировать различные клинические ситуации и получить образец движения-реакции настоящего ребенка.
Согласно п.3 дополнительно предусмотрено оптическое устройство с дисплеем, которое связано при помощи сигналов с вычислителем устройства управления и регулировки. Это устройство с дисплеем может представлять собой монитор или так называемые «очки» для показа данных. Во время имитации можно получать различную визуальную информацию. Когда, например, моделируют особую ситуацию при родах, синхронно показывают фильм, в котором, например, имеет место та же ситуация, что и при настоящих родах. Можно также выбрать и другие виды изображения, например изображение на рентгеновской пленке.
Согласно п.3 оптическое устройство с дисплеем показывает также комментарии и дополнительную информацию. Это очень помогает в процессе обучения, когда, например, поступают дополнительные комментарии об опасных ситуациях.
Согласно п.4 дополнительно предусмотрен генератор звука для формирования типичных шумов. Можно создавать как шумы, происходящие от движения ребенка, так и голос матери. Шумы можно создавать искусственным путем, однако они могут быть и естественного происхождения, т.е. речь идет о записи на магнитную ленту во время адекватной настоящей ситуации. Благодаря такой мере обучаемое лицо получает впечатление, близкое к действительности, когда, например, резкая родовая деятельность вызывает одновременно стоны рожениц.
Согласно п.5 генератор звука помещен в утробу матери. Таким образом шумы, производимые ребенком, имитируются очень натурально.
Согласно п.6 изготовлена модель ребенка, которая предназначена предпочтительно для использования в устройстве для имитации родов по пп.1-5. Модель ребенка имеет в шейной области и/или в области крыши черепа, которая состоит из деформируемых сегментов, датчики перемещения и/или силы, и/или давления, которые связаны на уровне сигналов с вычислителем устройства управления и регулировки.
Эта модель ребенка при использовании ее с устройством для имитации родов по пп.1-5 позволяет получать дополнительную информацию, которая повышает эффект обучения. Так можно зафиксировать, например, приложение силы к ребенку, когда подготовленное лицо воспроизводит проведение родов на имитаторе. Также будет действовать и обучаемое лицо. После этого можно сравнить и оценить обе характеристики силы.
Предпочтительным местом размещения датчика силы и/или крутящего момента является шея модели ребенка. Предпочтительным местом размещения датчиков перемещения или давления является область черепа модели ребенка. Если предусмотрены датчики перемещения, то череп выполнен с возможностью деформации по аналогии с настоящим черепом ребенка и имеет смещаемые черепные сегменты, смещения которых измеряются при помощи датчика перемещений.
Применяя модель ребенка с устройством для имитации родов по п.3, используют информацию, полученную от датчиков модели ребенка, для того чтобы подготовить больше информации, касающейся силы и крутящего момента, и чтобы она была более точной для расчета сил реагирования и связанных с ними движений. Следует, кроме того, упомянуть, что специалист при необходимости разместит и другие датчики в подходящих местах на модели ребенка или также в утробе матери, если это необходимо для получения сигнала при преобразовании конкретной имитации движений. Так, например, датчики давления можно расположить в области живота материнской утробы.
Изобретение поясняется ниже более подробно с помощью примеров выполнения, представленных на чертежах.
Фиг.1 - схематичное изображение первой активной формы выполнения изобретения.
Фиг.2 - схематичное изображение второй активной формы выполнения изобретения.
Фиг.3 - схематичное изображение третьей активной формы выполнения изобретения.
Фиг.4 - схематичное изображение четвертой активной формы выполнения изобретения.
Фиг.5 - схематичное изображение пятой активной формы выполнения изобретения.
Фиг.6 - схематичное изображение шестой активной формы выполнения изобретения.
Фиг.7 - схематичное изображение первой формы выполнения второго изобретения.
Фиг.8 - схематичное изображение второй формы выполнения второго изобретения.
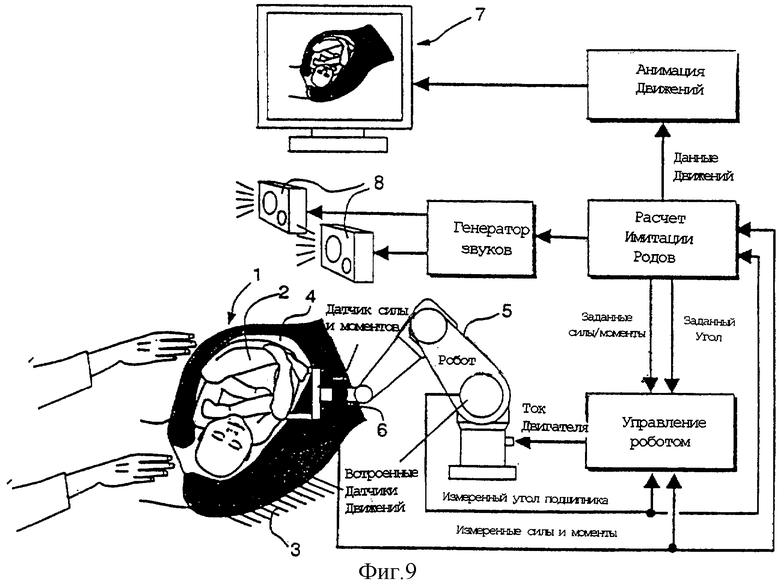
Фиг.9 - интерактивная форма выполнения изобретения.
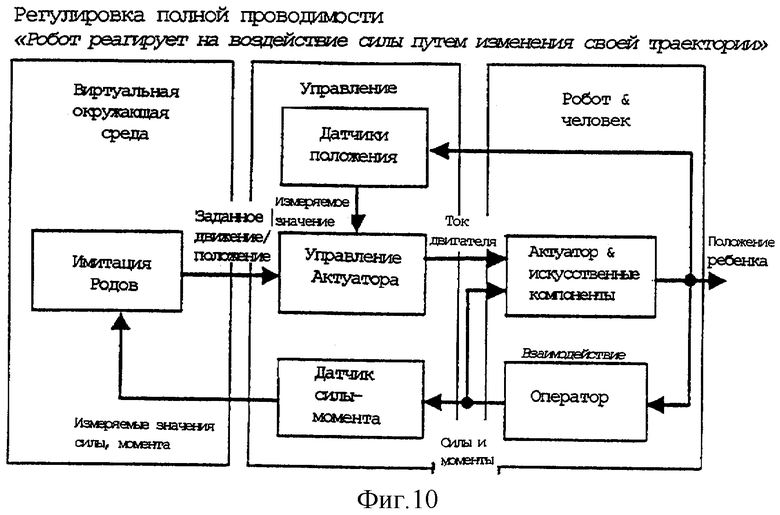
Фиг.10 - первый алгоритм регулирования для интерактивной формы выполнения изобретения.
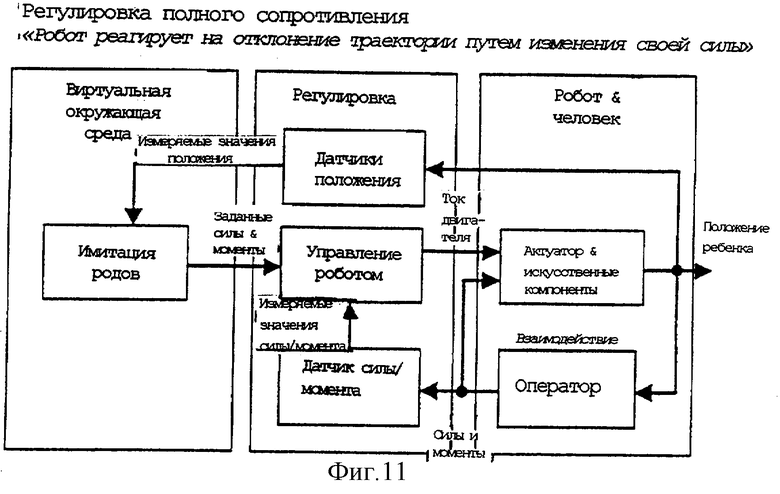
Фиг.11 - второй алгоритм регулирования для интерактивной формы выполнения изобретения.
На фиг.1 представлено поперечное сечение устройства для имитации родов, имеющего форму и размеры утробы 1 беременной женщины, и модель ребенка 2. Материнская утроба 1 в области 3 прочно закреплена на основании, например на столе. Модель ребенка 2 находится в углублении 4, которое служит моделью матки. Утроба матери 1 и модель ребенка 2 выполнены из мягкой упругой пластмассы. К модели ребенка 2 присоединен линейный привод 5 через датчик силы 6. Линейный привод 5 имеет внутреннее устройство распознавания положения, выполненное в виде системы измерения длины, и позволяет совершать возвратно-поступательное движение по стрелке 5а. Датчик силы 6 соединен с моделью ребенка 2 через шаровой шарнир 7а. Когда линейный привод 5 вытесняет модель ребенка 2 из родовых путей, обучаемое лицо должно удерживать и направлять модель ребенка 2 так же, как при настоящих родах. Датчик силы 6 регистрирует действующие при этом силы, а вычислительный электронный прибор обрабатывает их в виде сигналов измерения силы и помещает их в виде данных измерения силы в запоминающее устройство. Характеристики силы и движения, наблюдаемые при имитации родов, сравнивают с записанными в памяти характеристиками силы и движения, являющимися нормой. Из разницы между наблюдаемыми характеристиками силы и движения и записанными в памяти характеристиками силы и движения, являющимися нормой, можно сделать вывод об успехах обучаемого лица на тренировке.
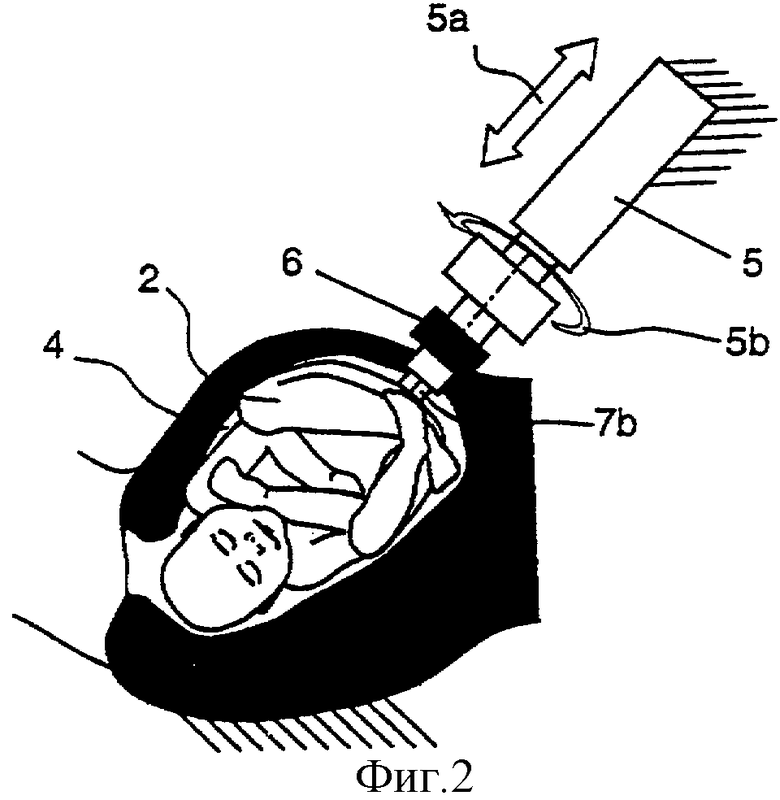
На фиг.2 представлено в принципе такое же устройство, что и на фиг.1, причем линейный привод 5 позволяет совершать наряду с возвратно-поступательным движением 5а также и вращательное движение 5b. В отличие от фиг.1, место соединения модели ребенка 2 с датчиком силы 6 выполнено в виде крутильно-жесткого, упругоэластичного элемента 7b.
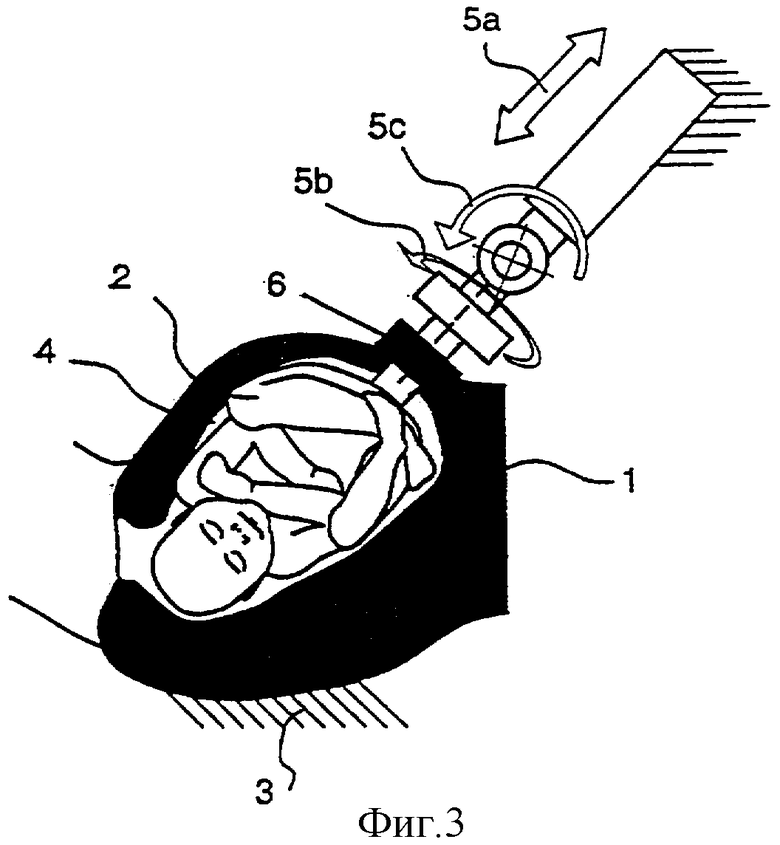
На фиг.3 представлено в принципе такое же устройство, что и на фиг.2, причем линейный привод 5 помимо движений 5а и 5b позволяет совершать дополнительное движение качания 5с. В отличие от фиг.1 или 2 место соединения модели ребенка 2 с датчиком силы 6 выполнено жестким.
На фиг.4 представлено в принципе такое же устройство, что и на фиг.3, причем линейный привод 5 помимо движений 5а, 5b и 5с выполняет еще одно дополнительное движение 5d, которое проходит под прямым углом к направлению движения 5а. Место соединения модели ребенка 2 с датчиком силы 6 выполнено также жестким.
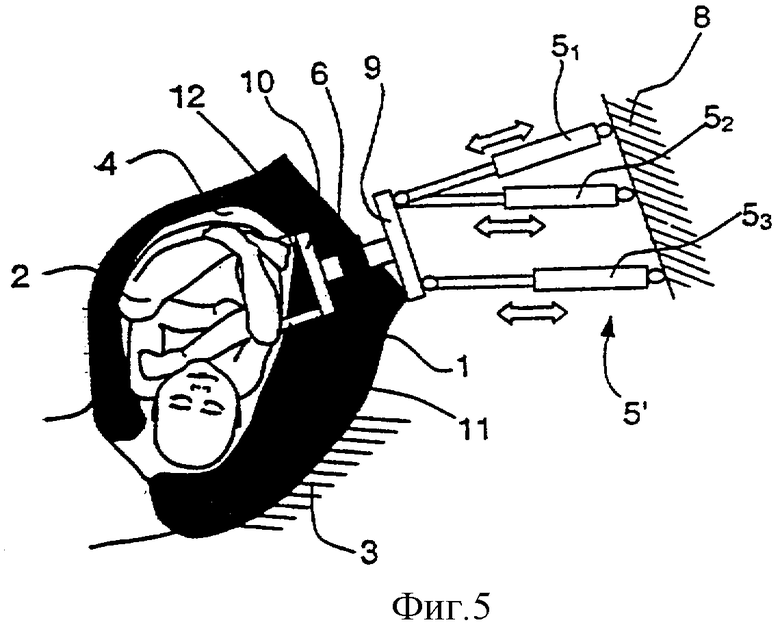
На фиг.5 представлен линейный привод 5, состоящий из трех отдельных приводов 51, 52 и 53, концевые участки которых соединены на шарнирах с возможностью поворота с контропорой 8 и с пластиной 9. Пластина 9 жестко соединена с двухточечным зажимом 10 через датчик силы 6. Двухточечный зажим 10 фиксирует модель ребенка 2 в точках 11 и 12.
На фиг.6 показан линейный привод 5, который, как описано со ссылкой на фиг.5, также состоит из трех отдельных приводов 51, 52 и 53, концевые участки которых соединены на шарнирах с возможностью поворота соответственно с контропорами 81, 82 и 83. Концевые участки, проходящие в направлении модели ребенка 2, соединены с ней с возможностью поворота в разных точках 21, 22 и 23.
С помощью таких схематичных чертежей и приведенных выше пояснений специалисту будет ясно, как при помощи разных приводов различной степени свободы можно вызывать почти реальные движения модели ребенка.
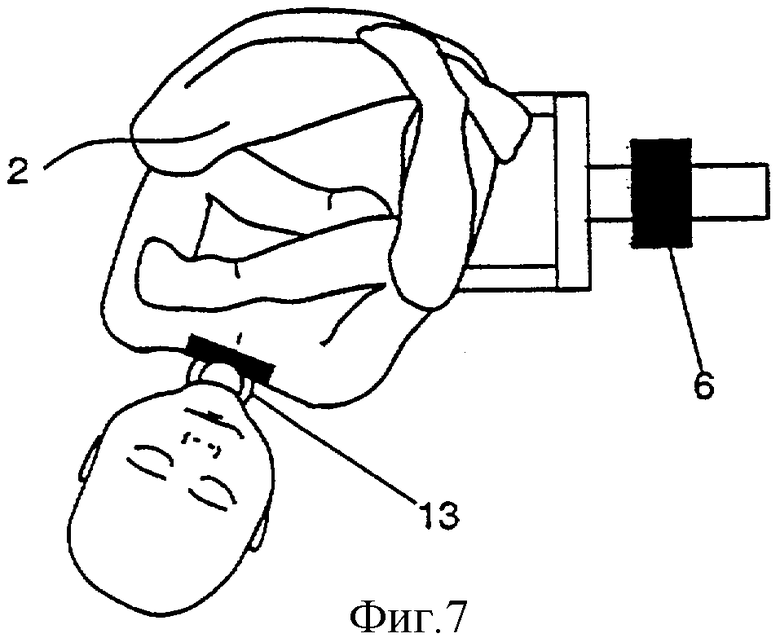
На фиг.7 представлена модель ребенка 2, голова которого соединена с корпусом при помощи датчика силы и крутящего момента 13. При имитации родов особенно важным является тренировка приемов на головке модели ребенка 2. При этом большое значение имеет шея ребенка. Поэтому при наблюдении за имитированными родами особое значение имеет контроль за тем, как берут головку ребенка, что возможно с помощью данной формы выполнения модели ребенка. Для передачи электрического измерительного сигнала в распоряжении специалиста имеются проводные, а также беспроволочные способы.
На фиг.8 представлена модель ребенка 2, на головке которого, в отличие от изображения на фиг.7, в области костей черепа дополнительно расположены датчики перемещения и давления 14. Кроме того, отдельные участки черепа модели ребенка 2 выполнены с возможностью смещения. При имитации родов участки черепа смещаются так же, как во время настоящих родов, причем при тренировке следует учесть, чтобы смещения не выходили за рамки заданных медицинских границ. При помощи датчиков перемещения и давления во время имитации родов можно регистрировать смещения и нажатия и по полученным данным судить, правильно ли держит и направляет головку модели ребенка обучаемое лицо. Специалисту предоставляется возможность выбора и применения подходящих датчиков перемещения и давления и подходящей для этого техники обработки сигналов.
На фиг.9 представлена схема поперечного сечения устройства для имитации родов, имеющего форму живота 1 беременной женщины с моделью ребенка 2. Живот 1 прочно закреплен в области 3 на основе, например на столе. Модель ребенка 2 находится в полости 4, которая имитирует матку. Живот 1 и модель ребенка 2 выполнены из мягкой упругой пластмассы. С моделью ребенка 2 соединен через шестикомпонентный датчик силы и крутящего момента 6 шестишарнирный робот 5 с последовательной кинематикой.
Когда при имитации родов робот 5 вытесняет модель ребенка из родовых путей, обучаемое лицо должно захватить и направлять модель ребенка 2 так же, как при настоящих родах. Приложенные при этом силы и крутящие моменты регистрирует шестикомпонентный датчик силы и крутящего момента 6, затем преобразует в электрические сигналы и передает в устройство управления и регулировки.
Робот имеет последовательную кинематику, т.е. несколько сегментов робота соединены друг с другом последовательно через приводимые в активное действие оси вращения. Направления осей вращения выбираются такими, что концевой исполнительный элемент робота может двигаться с моделью ребенка, соединенной с шестикомпонентным датчиком силы и крутящего момента 6, в шести степенях свободы (три позиции и три ориентации). Внутренние датчики положения угла шарнира регистрируют угловое положение робота и передают данные в устройство управления и регулировки. По данным положения угла шарнира определяют положение модели ребенка 2 в пространстве.
Когда обучаемое лицо касается модели ребенка 2 руками опосредованно через эластичное перекрытие 6 или также напрямую, то сила, которую он рукой или медицинским инструментов прикладывает к модели ребенка 2, вызывает движение. Модель ребенка 2 реагирует на это по образцу движения, который соответствует реальному движению - реакции настоящего ребенка.
Влияние на движения модели ребенка может происходить в принципе двумя способами:
Первый способ, представленный на фиг.10, является регулировкой полной проводимости, согласно которой силы, приложенные при прикосновению к модели ребенка 2, регистрирует шестикомпонентный датчик силы и крутящего момента и передает вычислителю при помощи программы имитации. Там происходит расчет получающегося движения модели ребенка 2, который передается дальше в устройство регулировки робота в виде заданного значения. Устройство регулировки робота сравнивает рассчитанное заданное движение с измеренным движением робота и питает робота током двигателя так, что погрешность между измеренным и рассчитанным движением становится минимальной.
Второй способ является регулировкой полного сопротивления, представленной на фиг.11, согласно которой регистрируют изменения положения и ориентации, вызванные действием сил и крутящих моментов, и передают в вычислитель с помощью программы имитации. После этого рассчитывают соответствующие силы и крутящие моменты и передают дальше в устройство регулировки робота в виде заданных значений. Устройство регулировки робота сравнивает рассчитанные заданные силы и крутящие моменты с действительными силами и крутящими моментами и заставляет робота двигаться так, что получаются минимальные погрешности.
Программа для расчета имитируемых родов включает в себя, таким образом, компьютерную модель, которая содержит биомеханические связи между тазом, маткой, связками, сухожилиями, кожей и мускулатурой матери и телом модели ребенка. Описываются статические и динамические взаимосвязи между появляющимися силами и крутящими моментами, которые обучаемое лицо прикладывает к модели ребенка, например акушерка, проходящая подготовку, и положения и движения ребенка с точки зрения позиций/ориентаций в пространстве и их происхождения, т.е. скорости и ускорения относительно тела матери. Таким образом, можно рассчитать либо по измеренным силам и крутящим моментам получающиеся движения модели ребенка 2 (регулирование полных проводимостей), либо по измеренным движениям ребенка соответствующие силы и крутящие моменты (регулирование полных сопротивлений), которые передаются обучаемому лицу.
При помощи регулировки механического силового устройства 5 обучаемое лицо имеет в отношении хватательных свойств субъективное впечатление реальной реакции. Благодаря выбору соответствующих параметров в расчетах для имитируемых родов можно имитировать не только нормальные родовые акты или движения ребенка, но также представить и наглядно увидеть редко встречающиеся ситуации и проблемные случаи.
В варианте выполнения изобретения согласно фиг.9 рассчитывают, кроме того, по первично обработанной при имитации родов информации о движениях движения и деформации анатомических компонентов, таких, например, как таз, матка, связки, сухожилия, кожа и мускулатура матери и ребенка, и показывают на мониторе 7 в реальном масштабе времени. Можно выбрать различные виды изображения, например изображения как на рентгеновских снимках, или изображения как при ультразвуковом исследовании, причем, например, можно выделить в цвете особо опасные участки или повреждения. Также можно переключаться с одного вида изображения на другой. Так как визуальная информация передается обучаемому лицу одновременно с информацией о хватательных свойствах, это лицо получает очень реальное общее впечатление.
В варианте выполнения изобретения согласно фиг.9 по биомеханическим расчетам определяют еще и граничные значения боли, при превышении которых поступает команда воспроизведения образца сигнала. Этот образец сигнала поступает в запоминающее устройство и может быть вызван по запросу и воспроизведен через стереосистему громкоговорителя 8. На обучаемое лицо оказывает дополнительное обучающе-психологическое действие, когда, например, при неправильном приеме раздается звук боли.
Ниже даются дополнительные комментарии по работе актуатора (исполнительного элемента) и его управления.
Актуатор (исполнительный элемент) был проверен при помощи промышленного робота RX90, имеющего шесть осей. Оригинальное управляющее вычислительное устройство робота требует относительно длительного времени цикла, более чем 16 мс. Для стабильной работы устройства, имитирующего роды, и для приближенного к действительности отображения биомеханических свойств без помех необходимы при известных условиях более высокие скорости развертки в диапазоне кГц в условиях реального масштаба времени и высокая производительность вычислительного устройства для осуществления процессов регулировки, основанных на модели. Поэтому параллельно было реализовано управление, основанное на ПК. При помощи переключателя датчики угла поворота, силы и крутящего момента и аналоговые сигналы для электронных шарнирных усилителей можно переключать с вычислительного устройства робота на ПК, где происходит регистрация/выход сигналов при помощи соответствующих PCI-плат. Благодаря размещению электронных шарнирных усилителей на устройстве регулировки тока можно реализовать на ПК описанную выше регулировку, основанную на подвижных устройствах сопряжения по крутящему моменту. Благодаря значительно более высокой производительности вычислительного устройства ПК время считывания сократилось до 250 μс, что является значительно лучшим результатом, чем при оригинальной конструкции. При этом выгодным является то, что все другие оригинальные компоненты, такие как шарнирные усилители, предохранительные электронные устройства для торможения и аварийной остановки, а также электроснабжение, остаются и могут использоваться.
Ниже даются дополнительные комментарии по реализации биомеханической модели.
Для осуществления изобретения нужно усовершенствовать биомеханическую модель, лежащую в основе. В биомеханической модели представлена связь между нагрузками, т.е. силами и крутящими моментами (причина), прилагаемыми к ребенку снаружи (оператор), и лежащим в основе движением или положением (следствие). Описывается ли при математическом изображении принцип причины и следствия или следствия и причины, зависит при этом от вида регулировки. При регулировке полных проводимостей нужна противоположная модель, т.е. в качестве функции следствия (положения, скорости). рассчитывают причины (силы, моменты). И наоборот, при полных сопротивлениях в непосредственной динамической модели (называется также прямой моделью) следствие рассчитывают по причинам. Способ расчета, т.е. прямой или обратный, не имеет определяющего значения для способа моделирования. Ниже показан пример моделирования в прямом направлении.
Ребенок имеет определенную анатомическую форму/геометрию, которую в самом простом случае можно рассматривать как неподвижную и прочную. Целесообразно допустить, что форма ребенка пассивно упруго деформируется при приложении к нему сил со стороны оператора или в результате контакта с участками утробы матери. Утроба матери, состоящая из матки, живота, родовых путей, таза и т.д., имеет определенные геометрические и упругие свойства.
Когда к ребенку прикладывают силу и/или момент, то эти нагрузки передаются через ребенка на контактные места «ребенок-мать» (например в матке или в родовых путях). В этих местах происходят относительные движения, обусловленные деформацией или трением. В зависимости от того, как устроены геометрические или упругие свойства соответствующих (т.е. заключающих в себе) участков тела ребенка или матери, происходят более или менее четкие движения («четкие» означает здесь: быстрые или в заметное степени). На положение ребенка можно, таким образом, влиять путем приложения нагрузки извне (через вагину или брюшную стенку). При этом следует заметить, что ребенок может двигаться из утробы матери и без влияния извне - просто в результате сокращения матки, если нет более значительных механических или мускульных сопротивлений. Если, однако, имеет место сужение родовых путей или череп ребенка «перекошен» из-за неблагоприятного перекошенного положения в родовых путях, оператор должен приложить силы и моменты так, чтобы либо увеличить «изгоняющие силы» (например путем нажатия вниз на брюшную стенку матери), либо устранить перекос, повернув головку ребенка (когда оператор проникает снаружи в родовые пути).
Биомеханическая модель не должна непременно содержать все анатомические компоненты и определенные формы. Достаточно известного абстрактного изображения математических связей между приложенными силами и получающимися в результате движениями. Т.е. математическая функция описывает, какое получается положение, ориентирование и скорость, если на ребенка в определенном месте и в определенном направлении действует сила или крутящий момент. При этом следует обратить внимание на многомерность проблемы. Т.е. прилагаемые силы и крутящие моменты действуют в трех измерениях и могут захватывать любое место поверхности ребенка. Получающиеся в результате положения, ориентирования и скорости следует давать так же в 3-х измерениях. Связь между силой/моментом и положением/движением зависит к тому же от положения ребенка в матке или в родовых путях в данный момент. Эти математические связи можно легко описать с помощью линейных или нелинейных алгебраических уравнений. Затруднительной, однако, является точная параметризация. Выбор параметров определяет, насколько приближенно к реальности можно имитировать нормальный или патологический родовой акт. Параметры можно получить на базе теоретических размышлений или на базе экспериментов или с помощью измерительной техники.
Ниже приводятся дополнительные комментарии по реализации графического дисплея. С помощью монитора показывают внутренние анатомические компоненты, например тазовые кости, матку, плаценту, маточный зев, кровеносные сосуды, а также ребенка. Монитор может работать вместе с так называемыми «очками» также в стереорежиме. Анимация движений происходит синхронно с движениями устройства, имитирующего роды. Оператор имеет тем самым возможность изучать внутренние, анатомические и биомеханические связи также и во время движения ребенка. Демонстрация происходит на базе разбитых на сегменты и восстановленных в трех измерениях СТ- и MRT-записей. Восстановленное анатомическое изображение представляет собой дополнительную информацию, которая для получения медицинского образования имеет большое дидактическое значение, но которую, однако, нельзя увидеть при настоящих родах. В клинической практике используют, как правило, только ультразвуковую технику для наблюдения и оценки родов. Такие ультразвуковые записи можно имитировать при анимации движений на базе составленных вместе отдельных изображений, которые возникают синхронно с проведением родов.
В графической анимации учитывают синхронные в движении изменения положения сегментов тела, изменения характеристики кровеносных сосудов или пуповины, а также деформацию мускулов, матки, плаценты и т.д. Демонстрация таких процессов движений возможна с помощью так называемых «кинематических СТ- и MRT-записей». При этом речь идет, однако, только о кинематографической технике, которая допускает интерактивное управление не более чем в одной степени свободы, а потому в области виртуальной реальности подходит в незначительной степени (Dupuy et al. 1997; Witonski und Goraj 1999). Альтернативой является анимация на базе модели. Здесь моделируются все компоненты с их существенными геометрическими и упругими свойствами в их механической согласованности. Для приближенной к реальности имитации необходимы, однако, FE-расчеты и сложные контактные модели, составленные из нескольких тел, которые значительно увеличивают расходы на изготовление имитаторов и могут поставить под угрозу способность системы работать в реальном масштабе времени.
Поэтому рекомендуется комбинированный способ, при котором используют изобразительные данные, равно как анатомические модели. Это заключается в том, чтобы геометрические данные, восстановленные по многочисленным дискретным моментам родов, интерполировать и экстраполировать таким образом, чтобы можно было продемонстрировать каждое любое положение ребенка в каждой важной степени свободы. Интерполяция и экстраполяция происходит при этом с опорой на модель, когда, например, учитывают сохранение объема или постоянной длины определенного участка тела. Так как это возможно при относительно скромных затратах на вычисления, можно достигнуть ровной характеристики движений в реальном масштабе времени в каждом любом направлении.
Ниже приводятся дополнительные комментарии по работе акустического дисплея. При родах возникает ряд различных акустических сигналов, которые формируют громкоговорители. Сюда относятся крики матери от боли, шумы при выходе ребенка, акустически представленные сигналы, например родовая деятельность матери и ЭКГ ребенка. Громкоговорители можно разместить вблизи искусственных участков тела или так встроить в участки тела, что их не будет видно снаружи. Шумы можно записать во время родов у нескольких женщин. Для изображения шумов нужно найти модели, которые связывают вид шума с ситуацией, лежащей в основе, и выполняемыми движениями персонала. На основе опыта многих гинекологов эти связи можно описать качественно сначала с помощью лингвистических переменных. С помощью метода нечеткой логики можно затем на основании лингвистических данных сделать вывод о количестве связей.



Изобретение относится к медицинским устройствам для обучения и позволяет имитировать роды. Устройство имеет следующие признаки: утробу матери, модель ребенка, расположенную в утробе матери, причем предпочтительно соблюдены естественные соотношения форм, размеров и положения. Модель ребенка соединена через соединительное устройство с управляемым приводом для приведения в движение модели ребенка в утробе матери или для вытеснения ее из утробы матери по родовым путям. Предусмотрено программируемое устройство управления для управления и регулировки прива. Изобретение позволяет изучать и отрабатывать приемы родовспоможения. 5 з.п. ф-лы, 11 ил.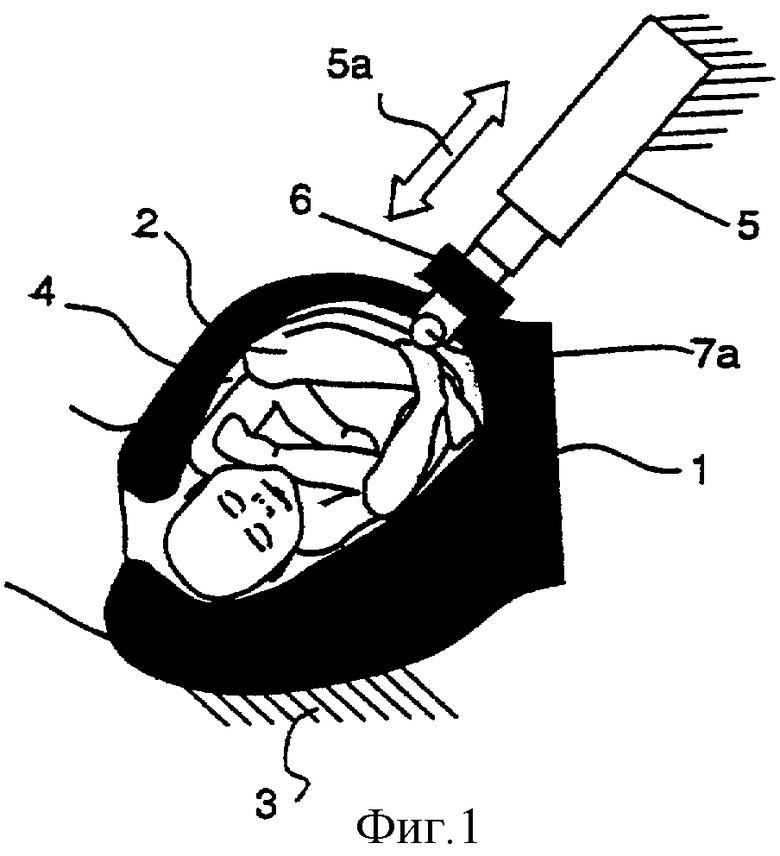
имитатор утробы матери, выполненный из упругого материала,
модель ребенка, выполненную из упругого материала и расположенную в имитаторе утробы матери с соблюдением естественных соотношений форм и размеров ребенка и его естественных движений, при этом
модель ребенка соединена с помощью соединительного устройства через датчик силы с управляемым приводом для приведения в движение модели ребенка в имитаторе утробы матери или для вытеснения ее из имитатора утробы матери по родовым путям, и
предусмотрено программируемое устройство управления и регулировки для управления приводом, отличающееся тем, что дополнительно включает сенсорное устройство для регистрации сил, которые передаются имитатору утробы матери или модели ребенка от лица, проводящего обследование рукой или медицинскими инструментами, или для регистрации изменения положений, вызванных действием сил и крутящих моментов, причем датчики сенсорного устройства расположены на соединительном устройстве и/или на приводных элементах, и устройство управления и регулировки выполнено таким образом, что обеспечивает поступление из сенсорного устройства сигналов измерений в вычислитель, в котором заложена программа имитации, которая обеспечивает движение модели ребенка, соответствующее естественному поведению ребенка в утробе матери при обследовании или в момент родов при воздействии на нее сил извне.
| US 3824709 А, 23.07.1974 | |||
| US 4907973 А, 13.03.1990 | |||
| US 6238215 B1, 29.05.2001 | |||
| Способ моделирования слабости родовой деятельности | 1980 |
|
SU930346A1 |

