Изобретение относится к области устройств обучения и измерения параметров движения спортсменов.
Известен ряд устройств обучения и тренировки спортсменов.
Так, например, известно устройство по патенту США №4121829 для тренировки футболистов. Устройство позволяет спортсмену отрабатывать технику владения мячом.
По патенту США №6464622, 2002 г. известна система для обучения и тренировки боксера. Эта система содержит тренировочную грушу, на которой в различных ее областях установлены датчики удара боксера. В состав системы входят блок звуковой индикации удара боксера по груше и блок измерения силы и скорости удара. Вся аппаратура для тренировки боксера размещена на специальном основании, закрепленном на стенке спортзала.
Эта система принята в качестве прототипа настоящего изобретения.
Недостатком прототипа является невозможность его применения для обучения фигуристов сложнокоординационным двигательным действиям вращательного характера при выполнении многооборотных прыжков.
Задача настоящего изобретения заключается в создании системы, позволяющей обучать этим действиям фигуристов и измерять параметры движения при их выполнении.
Система также может быть использована в других видах спорта, где возникают аналогичные задачи, например прыжках в воду, гимнастике, фристайле и т.п.
Согласно изобретению эта цель достигается тем, что в систему обучения и измерения параметров движения фигуриста при выполнении сложнокоординационных двигательных действий вращательного характера, содержащую блок звуковой индикации, введен датчик группировки, закрепленный на корпусе фигуриста в области требуемого положения звеньев тела и подключенный к блоку звуковой индикации.
В систему могут быть введены блок замыкания датчиков группировки и подключенные к нему дополнительные датчики группировки, закрепленные в областях требуемого положения звеньев тела, закрепленные, например, на коньках датчики контакта коньков со льдом, блок распознавания прыжка, блок измерения и индикации длительности прыжка, при этом датчики контакта коньков со льдом и датчик группировки подключены к блоку распознавания прыжка, соединенному с блоком измерения и индикации длительности прыжка. Система может также содержать линейный акселерометр и подключенный к нему блок расчета и индикации угловой скорости вращения фигуриста, при этом линейный акселерометр закреплен на корпусе фигуриста так, что его ось чувствительности перпендикулярна продольной оси корпуса фигуриста. В систему может быть включена монтажная одежда, например жилет, при этом датчик группировки, блок звуковой индикации и соединительные провода закреплены на жилете.
Датчик группировки может быть выполнен в виде закрепленных на электроизолирующем основании пружины, например плоской, и электрического контакта, расположенного в зоне нахождения пружины при ее сжатии, при этом в состав устройства введен элемент регулировки жесткости пружины. Датчик группировки может быть выполнен в виде источника оптического излучения и фотоприемника, установленных в корпусе датчика с возможностью приема фотоприемником отраженного от сгруппированного звена тела оптического сигнала. Система может включать блок измерения и индикации длительностей удержания группировок и замыкания датчиков группировок, соединенный с датчиками группировки и блоком замыкания датчиков группировок, и световые индикаторы, подключенные к блоку замыкания датчиков группировок, при этом количество световых индикаторов равно количеству датчиков группировки. Датчик контакта конька со льдом может быть выполнен в виде источника оптического излучения и фотоприемника, установленных в корпусе датчика с возможностью приема фотоприемником отраженного от ледовой поверхности сигнала при контакте конька с нею. Система также может включать блок расчета разностей, подключенный к блоку измерения и индикации длительностей удержания группировок и замыкания датчиков группировок.
Сущность изобретения поясняется фиг.1-11.
На фиг.1-11 обозначено:
1 - фигурист
2 - конек фигуриста
3 - лед
4 - область требуемого положения звеньев тела
5 - датчик группировки
6 - блок звуковой индикации
7 - рука фигуриста
8 - второй датчик группировки
9 - третий датчик группировки
10 - вторая область требуемого положения звеньев тела
11 - третья область требуемого положения звеньев тела
12 - блок замыкания датчиков группировки
13 - левый конек
14 - правый конек
15 - левый датчик контакта конька со льдом
16 - правый датчик контакта конька со льдом
17 - блок распознавания прыжка
18 - блок измерения и индикации длительности прыжка
19 - линейный акселерометр
20 - ось чувствительности
21 - блок расчета и индикации угловой скорости
22 - жилет
23 - кабель
24 - токоизолирующее основание
25 - пружина
26 - электрический контакт
27 - элемент регулировки жесткости пружины
28 - источник питания
29 - корпус датчика
30 - источник оптического излучения
31 - фотоприемник
32 - усилитель
33 - блок питания
34 - поверхность
35 - блок измерения и индикации длительностей удержания группировок и замыкания датчиков группировок
36 - световые индикаторы
37 - корпус датчика контакта конька со льдом
38 - источник оптического излучения датчика контакта конька со льдом
39 - фотоприемник датчика контакта конька со льдом
40 - усилитель фотоприемника датчика контакта конька со льдом
41 - блок расчета разностей длительностей удержания группировок
На фиг.1 изображена одноканальная система обучения фигуриста требуемому положению звеньев тела при выполнении прыжка с вращением.
Фигурист 1 после толчка коньком 2 от ледовой поверхности 3 находится в состоянии вращательного движения вокруг своей продольной оси А-А с угловой скоростью ω.
На корпусе фигуриста 1, в области требуемого положения звеньев тела 4 закреплен датчик группировки 5, соединенный с блоком звуковой индикации 6, который также закреплен на корпусе фигуриста 1. Кисть руки 7 фигуриста 1 находится в требуемом положении на датчике группировки 5.
На фиг.2 изображена многоканальная система обучения фигуриста требуемому положению звеньев тела при выполнении прыжка с вращением.
На корпусе фигуриста 1, изображенном на фиг.2 схематично, кроме датчика группировки 5, закрепленного в области требуемого положения звеньев тела 4, закреплены дополнительные датчики группировки - второй датчик группировки 8 и третий датчик группировки 9. Эти датчики закреплены соответственно во второй области требуемого положения звеньев тела 10 и третьей области требуемого положения звеньев тела 11.
В состав системы введен блок замыкания датчиков группировки 12, соединенный с блоком звуковой индикации 6.
Дополнительные датчики группировки 8 и 9 фигуристом предназначены для обучения требуемому положению второй руки и ног.
Для правильного выполнения прыжка с максимальным числом оборотов важно, чтобы начальный момент выполнения группировок звеньев тела возможно более точно совпал с моментом отрыва фигуриста от льда, а окончание группировок возможно более точно с моментом его приземления на лед.
Система, изображенная на фиг.3, позволяет достаточно точно определить моменты отрыва фигуриста от льда и его приземления на лед и измерить длительность прыжка.
В систему, изображенную на фиг.3, введены установленные соответственно на левом 13 и правом 14 коньках датчики контакта конька 15 и 16 (которые могут быть закреплены и на ботинках фигуриста) со льдом 3, блок распознавания прыжка 17 и блок измерения и индикации длительности прыжка 18.
На фиг.4 изображена система, в которую введены линейный акселерометр 19 и соединенный с ним блок расчета и индикации угловой скорости 20.
Ось чувствительности 21 линейного акселерометра 19 направлена перпендикулярно продольной оси А-А корпуса фигуриста 1. Вокруг этой оси с угловой скоростью о вращается фигурист 1 при выполнении многооборотного прыжка.
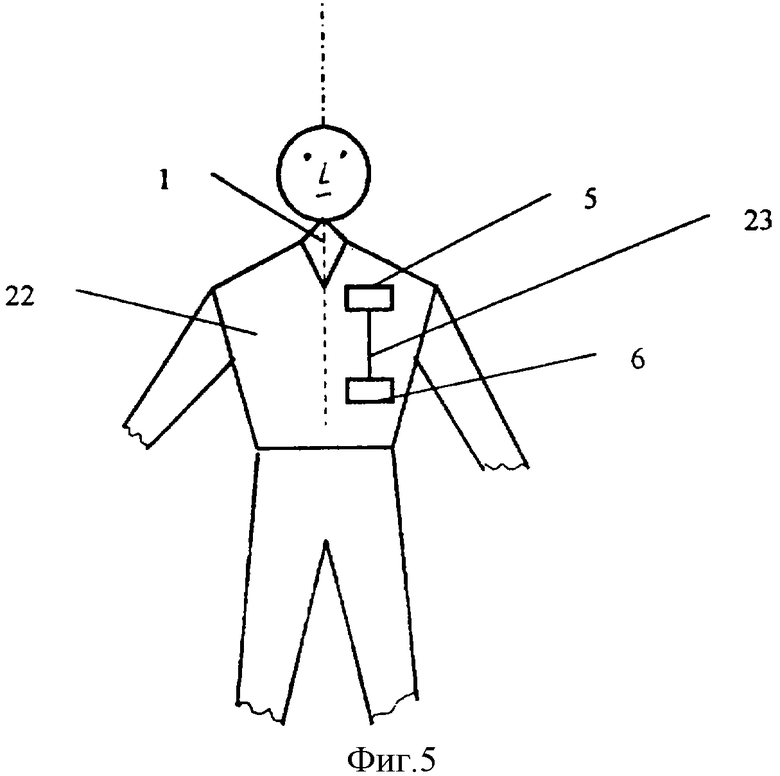
На фиг.5 изображен фигурист 1 в надетом на него жилете 22, являющимся частью системы обучения и измерения параметров движения фигуриста.
На жилете 22 закреплены датчик группировки 5 и блок звуковой индикации 6 и соединяющий их кабель 23.
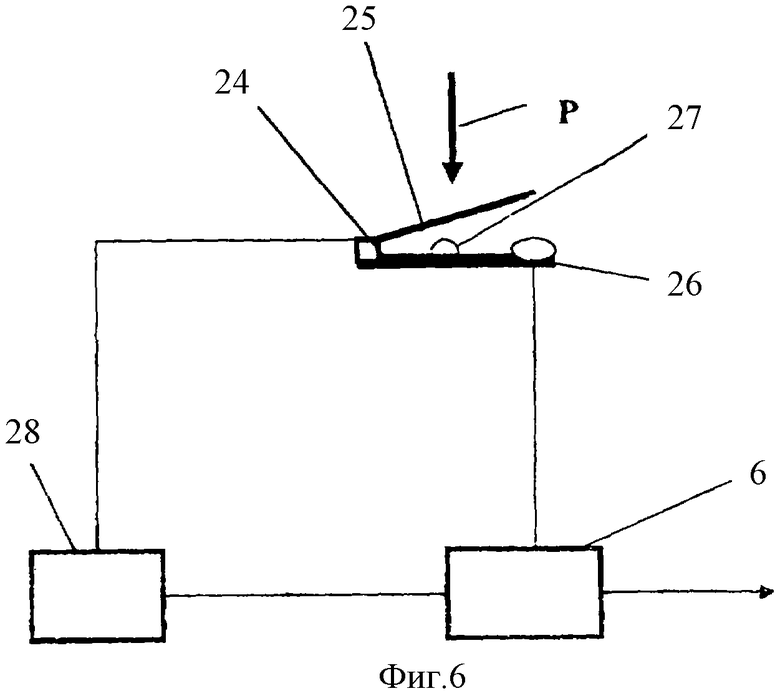
На фиг.6 изображен один из вариантов конструкции датчика группировки 5.
Конструкция датчика состоит из токоизолирующего основания 24, на котором закреплена пружина, например, плоская 25 и электрический контакт 26. В состав устройства введен элемент регулировки жесткости пружины 27.
Питание датчика группировки осуществляется блоком питания 27. Электрический контакт 25 соединен с блоком звуковой индикации 6.
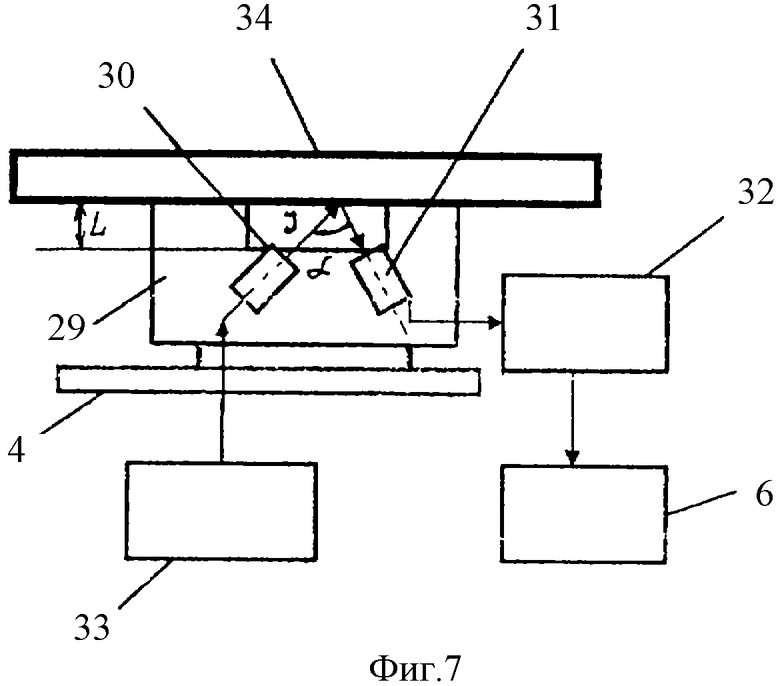
На фиг.7 изображен другой вариант конструкции датчика группировки 5. В состав датчика входят П-образный корпус 29, в котором установлены источник оптического излучения 30 и фотоприемник 31, усилитель 32 и блок питания 33 источника оптического излучения.
Корпус 29 закреплен на теле фигуриста в области требуемого положения звеньев тела 4. Усилитель 32 соединен с блоком звуковой индикации 6.
Источник оптического излучения 30 и фотоприемник 31 установлены в корпусе 29 под углом α. Угол α выбран таким, чтобы сигнал от источника оптического излучения 30, отраженный от любой поверхности 34, контактирующей с корпусом 29, попадал на фотоприемник 31.
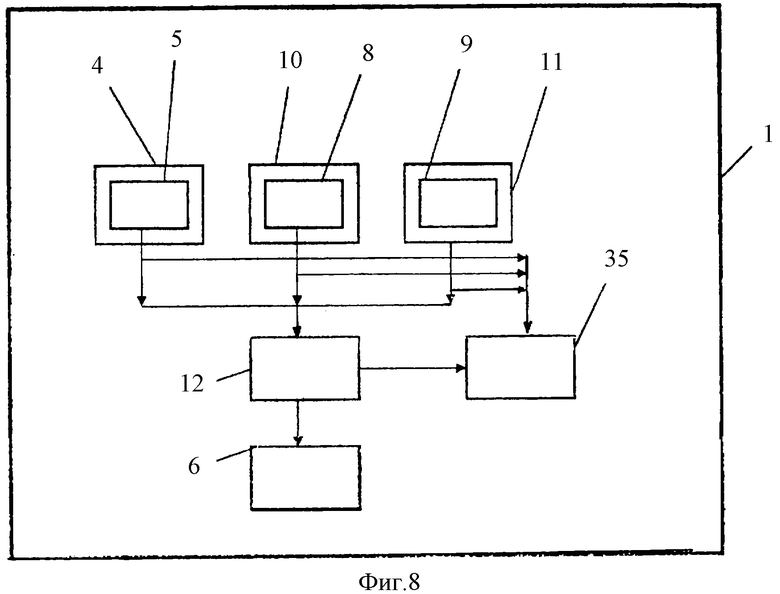
На фиг.8 изображена многоканальная система с блоком измерения и индикации длительностей удержания группировок и замыкания датчиков группировок 35.
В состав системы входят датчики группировки 5, 8, 9, закрепленные в областях требуемого положения звеньев тела 4, 10, 11, блок замыкания датчиков группировки 12 и блок звуковой индикации 6.
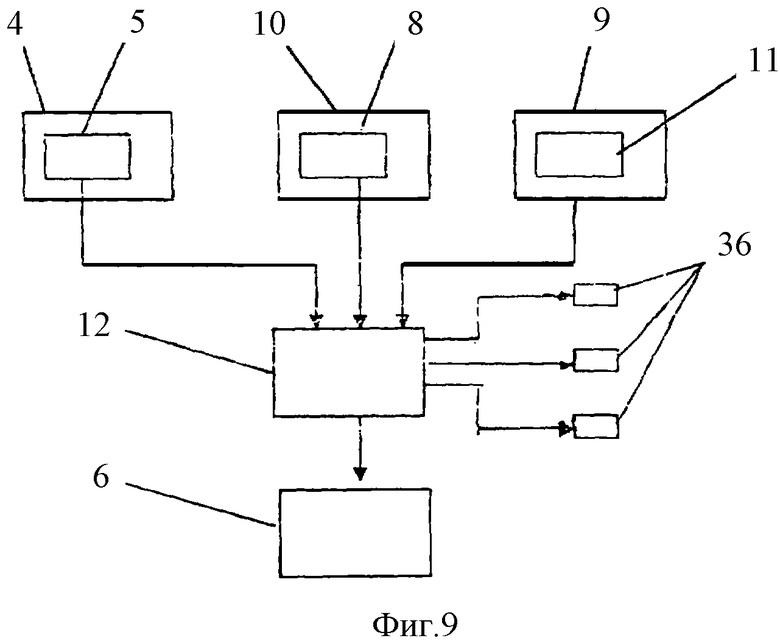
В состав многоканальной системы, изображенной на фиг.9, введены световые индикаторы 36. Количество световых индикаторов 36 равно количеству датчиков группировки. В изображенном на фиг.9 варианте показано три датчика группировки 5, 8, 11 и три световых индикатора 36, подключенных к блоку замыкания датчиков группировки 12.
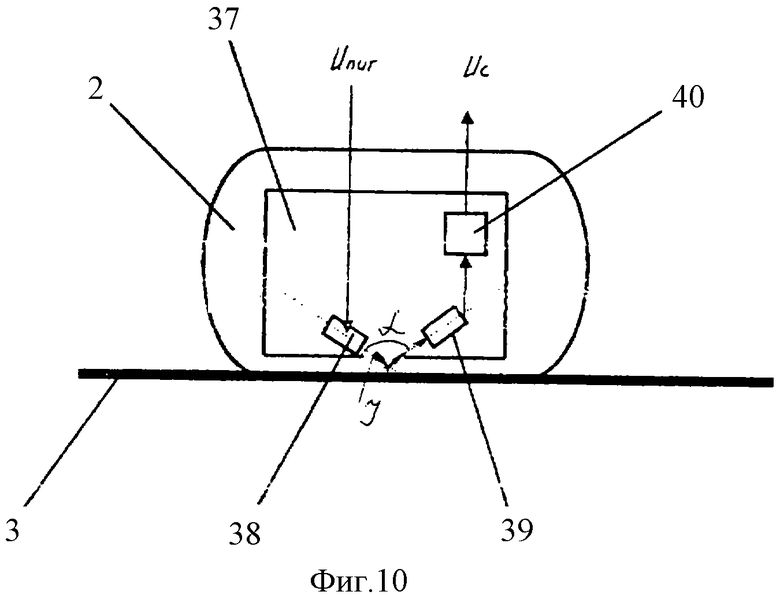
На фиг.10 изображен вариант конструкции датчика контакта конька с ледовой поверхностью.
Датчик контакта конька с ледовой поверхностью установлен на коньке 2 и содержит корпус 37, в котором установлены источник оптического излучения 38, фотоприемник 39, усилитель 40.
Источник оптического излучения 38 и фотоприемник 39 установлены в корпусе 37 под углом α. Угол α выбран таким, чтобы при соответствующей установке корпуса 37 на конек 2 сигнал от источника оптического излучения 38, отраженный от ледовой поверхности 3, контактирующей с коньком 2, попадал на фотоприемник 39.
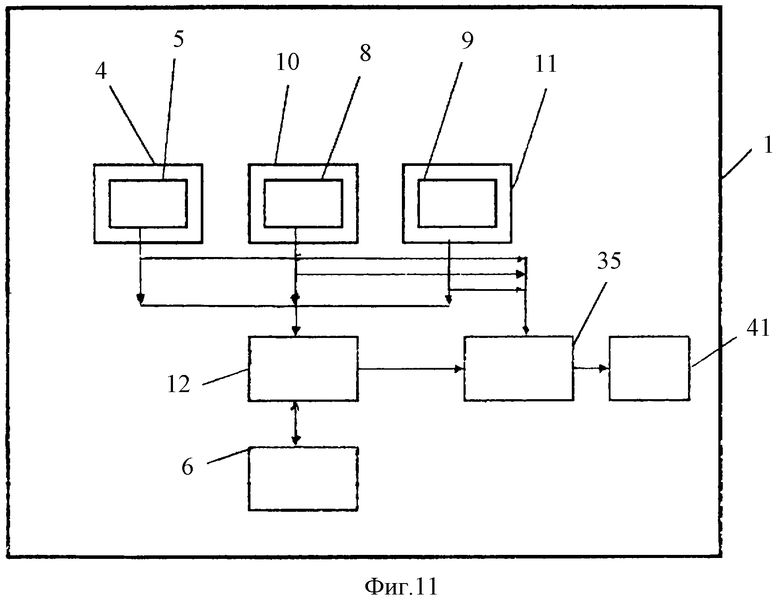
На фиг.11 изображена система с блоком расчета разностей длительностей удержания группировок 41.
В состав системы, кроме блока 41, входят датчики группировки 5, 8, 9, закрепленные в областях 4, 10, 11, блок замыкания датчиков группировки 12, блок звуковой индикации 6, блок измерения и индикации длительностей удержания группировок звеньев тела и замыкания датчиков группировок 35.
Работа системы происходит следующим образом.
При выполнении фигуристом 1 прыжка с вращением вокруг продольной оси А-А с угловой скоростью со (см. фиг.1) фигурист должен правильно сгруппировать руку 7 - первое звено относительно корпуса - второе звено. Ладонь руки 7 должна во время прыжка контактировать с телом фигуриста в определенной области - области требуемого положения звеньев тела 4. При правильном выполнении группировки датчик группировки 5, который установлен в области 4, срабатывает, и сигнал с него поступает на блок звуковой индикации 6.
Блок звуковой индикации 6 генерирует звуковой сигнал в течение времени удержания группировки tуд.
При неправильном выполнении группировки, когда ладонь контактирует с телом в другом месте или вообще нет контакта, датчик группировки 5 не срабатывает, и звуковой сигнал не генерируется.
По наличию - отсутствию сигнала фигурист и тренер могут определять качество выполнения группировки и вести ее отработку до устойчиво правильного выполнения.
Изображенная на фиг.2 система позволяет одновременно отрабатывать правильность выполнения группировки нескольких звеньев тела спортсмена.
Так, например, для фигуриста при прыжке важно правильно выполнить группировку обеих рук и ног. Для этого три датчика группировки 5, 8, 9 закрепляются на теле фигуриста 1 в областях требуемого положения группируемых звеньев тела 4, 10, 11 соответственно.
При правильном выполнении группировки всеми звеньями тела каждый из датчиков группировки выдаст сигнал определенной длительности. Эти сигналы поступают на блок замыкания датчиков группировки 12. Блок 12 на основании полученных сигналов от датчиков группировки 5, 8, 9 выработает сигнал, длительность которого равна промежутку времени, в течение которого все три датчика группировки замкнуты. Этот сигнал поступает на блок звуковой индикации 6, который генерирует звуковой сигнал, воспринимаемый фигуристом и тренером.
Звуковой сигнал несет информацию о факте правильного выполнения группировки, а его длительность - о времени удержания положения плотной группировки всеми тремя звеньями.
При неправильном или неплотном выполнении группировки звеньев тела соответствующие датчики группировки не вырабатывают сигнала. В этом случае будет отсутствовать сигнал и на выходе блока 12 и, как следствие, звуковой сигнал. Отсутствие звукового сигнала воспринимается фигуристом как информация о неправильном выполнении группировки в какой-либо паре звеньев тела.
Изображенная на фиг.3 система позволяет измерять длительность многооборотного прыжка фигуриста.
Выполняя многооборотный прыжок, фигурист при отрыве отталкивается от льда одним коньком и приземляется на один конек.
При отрыве фигуриста 1 от льда 3 датчики контакта конька со льдом 15 и 16 последовательно вырабатывают два сигнала, информирующие об отрыве соответствующего конька от льда. По последнему сигналу, информирующему об отрыве фигуриста от льда, включается блок измерения и индикации длительности прыжка 18.
Одновременно сигналы с датчиков 15, 16 поступают на блок распознавания прыжка 17, на который также поступает сигнал с датчика группировки 5. Блок 17 решает задачу распознавания многооборотного прыжка от других элементов движения, выполняемых фигуристом.
Признаком, определяющим многооборотный прыжок, является группировка звеньев тела фигуриста.
Сигнал датчика группировки 5, поступающий на блок распознавания 17, информирует последний о наличии или отсутствии группировки.
Если сигнал группировки присутствую на входе блока 17, то при наличии на его входах сигналов от датчиков 15, 16, информирующих об отрыве, последний дает разрешение блоку 18 на продолжение измерения длительности прыжка.
При приземлении фигуриста на лед срабатывает датчик контакта конька со льдом - 15 или 16, в зависимости от того, на какую ногу приземлился фигурист. По сигналу сработавшего датчика фиксируется момент времени приземления, и информация о длительности прыжка индицируется блоком 18.
Если сигнала о наличии группировки на входе блока 17 нет, измерение времени прекращается, и блок 18 выключается.
Описанным образом производится отделение многооборотного прыжка от других элементов движения, выполняемых фигуристом с отрывом от льда, и измерение и индикация его длительности.
Знание длительности прыжка позволит тренеру и фигуристу определить степень рассинхронизаций группировок звеньев тела по отношению к длительности полета и выработать рекомендации по их минимизации.
Измерение угловой скорости со вращения вокруг продольной оси А-А корпуса фигуриста 1 происходит следующим образом (см. фиг.4).
При вращении фигуриста 1 линейный акселерометр 19, расположенный на расстоянии R от продольной оси А-А, измеряет центростремительное ускорение W, направленное к центру вращения, расположенному на оси А-А.
Измеренные значения этого ускорения поступают в блок расчета и индикации угловой скорости 21. Центростремительное ускорение Wц связано с угловой скоростью ω известным соотношением Wц=R·ω2.
В блоке 21 по формуле  вычисляется и индицируется угловая скорость ω вращения фигуриста.
вычисляется и индицируется угловая скорость ω вращения фигуриста.
Значение расстояния R может быть заранее заложено в блок расчета и индикации 21. Возможен вариант ввода этих значений в блок 21 перед прыжком.
Жилет 22, изображенный на фиг.5, с закрепленными на нем датчиком группировки 5, блоком индикации 6 и кабелем 23, обеспечивает удобство применения системы.
Для ее практического использования фигурист должен только надеть жилет. Не требуется закреплять и подгонять блоки и кабель на одежде фигуриста. Жилет выполняет функции специальной монтажной одежды, на которой заранее установлены блоки системы.
Один из вариантов конструкции датчика группировки, представленный на фиг.6, работает следующим образом.
При выполнении группировки к плоской пружине 25 прикладывается усилие Р, осуществляемое одним из звеньев тела. Под действием этого усилия пружина 25 входит в соприкосновение с электрическим контактом 26. При этом в цепи, составленной источником питания 28, пружиной 25, контактом 26 и блоком звуковой индикации 6, протекает электрический ток. Этот ток включает блок звуковой индикации 6.
Изменяя с помощью элемента регулировки жесткости 27 жесткость пружины 25, можно добиться требуемой силы давления группируемого звена на тело фигуриста, т.е. отрабатывать усилие, с которым группируемое звено должно входить в контакт с областью требуемого положения звена тела.
При отсутствии усилия Р или его недостаточной величине цепь разомкнута, и ток отсутствует.
Другой вариант конструкции датчика группировки, представленный на фиг.7, работает следующим образом.
Питание от блока питания источника оптического излучения 33 поступает на источник оптического излучения 30, который генерирует световой поток J. Если группировка произошла правильно, то поверхность 34, являющаяся одним из звеньев группируемой пары, войдет в контакт с корпусом 29 датчика группировки, который закреплен в области удержания группировки 4.
При этом световой поток J отразится от поверхности 34 и попадет на фотоприемник 31, продольная ось которого расположена под углом α к продольной оси источника оптического излучения 30. Заглубление в корпусе 29 величиной L и угол α выбраны таким образом, чтобы обеспечить попадание отраженного от поверхности 34 оптического сигнала в зрачок фотоприемника 31.
Сигнал с фотоприемника 31 поступает на усилитель 32 и далее на блок звуковой индикации 6, информирующий сигналом о правильности выполнения группировки.
Если группировка произошла неправильно, и поверхность 34 не контактирует с корпусом 29 датчика группировки, то световой поток J, не встречая отражающую поверхность, уходит в пространство, и на входе фотоприемника 31 сигнал отсутствует.
Измерение временных параметров группировок звеньев тела осуществляется в системе, изображенной на фиг.8.
Работа устройства происходит следующим образом.
Сигналы с датчиков группировки 5,8,9 и блока замыкания датчиков группировки 12 поступают на блок измерения и индикации длительностей удержания группировок и замыкания датчиков группировки 35.
Этот блок измеряет и индицирует длительность времени замыкания (времени удержания группировки) каждого из датчиков группировки 5,8,9 - tуд1, tуд2, tуд3 и длительность промежутка времени, когда замкнуты все датчики - 1уд.одн.
Таким образом, фигурист и тренер могут количественно оценить длительность удержания группировки различными звеньями тела. Эти параметры является важными с точки зрения оценки возможности фигуриста выполнить многооборотный прыжок.
Световые индикаторы 36, изображенные на фиг.9, предназначены для индикации того звена тела, группировка которого в процессе выполнения прыжка выполнена неправильно. Информация о неправильном выполнении группировки имеется в блоке замыкания датчиков группировки 12. Если какой-либо из датчиков не сработал при выполнении прыжка, в блоке 12 вырабатывается сигнал на включение светового индикатора, соответствующего несработавшему датчику группировки.
Таким образом, при неправильном выполнении группировки система выявит те пары звеньев тела, группировки которых выполняются неправильно.
На фиг.10 изображен вариант исполнения датчика контакта конька с ледовой поверхностью.
Датчик контакта работает следующим образом.
На источник оптического излучения 38 подается питание Uпит. Источник оптического излучения генерирует световой поток J. Если конек 2 контактирует со льдом 3, то световой поток отразится от него и попадет на фотоприемник 39, продольная ось которого расположена под углом α к продольной оси источника оптического излучения 38. Сигнал фотоприемника 39 поступает на усилитель 40.
Если фигурист совершил прыжок, и контакта конька 2 со льдом 3 нет, то отраженный ото льда 3 световой поток J уходит в пространство и не попадает в зрачок фотоприемника 38. В этом случае сигнал на выходе усилителя 39 Uc будет отсутствовать.
Таким образом, при контакте конька 2 со льдом 3, на выходе усилителя 40 всегда будет наблюдаться сигнал Uc, а при выполнении прыжка сигнала на выходе усилителя 40 не будет. Это обстоятельство позволяет произвести отметки времени начала и окончания прыжка и измерить длительность полета.
Количественную оценку последовательности выполнения группировок различными звеньями тела позволяет осуществить система, изображенная на фиг.11.
Ее работа происходит следующим образом.
Измеренные параметры tуд1, t2уд, 1уд3, tуд.одн. из блока 35 поступают в блок расчета разностей длительностей удержания группировок 41. В этом блоке формируются разности типа:
Δt1=tуд1-tуд2, Δt2=tуд2-tуд3, Δt3=tуд3-tуд1, Δt4=tуд.одн.-tуд1 и т.п. Эти разности индицируются в блоке 35.
По разностям Δti тренер и фигурист могут количественно оценить рассинхронизации группировок и выработать рекомендации по их минимизации.
Предлагаемое изобретение дает возможность фигуристу и тренеру объективно:
- выявлять пары звеньев тела, группировки которых выполняются неправильно;
- определять длительность выполнения группировки звеньев тела;
- определить синхронность выполнения группировки различными звеньями тела;
- определить синхронность выполнения группировки различными звеньями тела по отношению к временным параметрам прыжка;
- определять угловую скорость вращения фигуриста при выполнении многооборотного прыжка и на основе знания этих характеристик более эффективно отрабатывать на тренировках группировки звеньев тела фигуриста по отдельности и совместно.
Предлагаемая система может быть реализована на современных элементах микропроцессорной техники.
Система может быть использована не только в фигурном катании, но и в других видах спорта, где требуется группировка звеньев тела спортсмена, например в гимнастике, акробатике, фристайле.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ФИГУРИСТА | 2008 |
|
RU2399402C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДЛИТЕЛЬНОСТИ МНОГООБОРОТНОГО ПРЫЖКА | 2008 |
|
RU2399403C2 |
| СПОСОБ ЭЛЕКТРОННОГО КОНТРОЛЯ АМОРТИЗАЦИИ ПРИЗЕМЛЕНИЯ ФИГУРИСТА ПОСЛЕ ПРЫЖКА | 2011 |
|
RU2466763C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩАТЕЛЬНОГО И ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ФИГУРИСТОВ В ПАРНОМ КАТАНИИ | 2011 |
|
RU2492898C2 |
| СИСТЕМА МОНИТОРИНГА ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ИГРОКОВ ФУТБОЛЬНОЙ КОМАНДЫ | 2008 |
|
RU2399400C2 |
| СПИННЕР ФИГУРИСТА | 2017 |
|
RU2753641C2 |
| СВЕТОВОДНЫЙ ВРАЩАЮЩИЙСЯ СОЕДИНИТЕЛЬ | 1992 |
|
RU2069381C1 |
| Устройство для определения положения кромки движущегося материала | 1990 |
|
SU1768975A1 |
| СПОРТИВНЫЙ ТРЕНАЖЁР ДЛЯ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УДАРНЫХ И ТОЛЧКОВЫХ ДВИЖЕНИЙ | 2001 |
|
RU2212920C2 |
| УСТРОЙСТВО ВИЗУАЛЬНОГО КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И СКОРОСТИ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2099253C1 |
Изобретение относится к области систем для обучения спортсменов сложнокоординационным двигательным действиям вращательного характера и позволяет обеспечить объективную возможность фигуристу и тренеру выявлять звенья тела, группировки которых выполняются неправильно, определять длительность и синхронность выполнения группировки различными звеньями тела. Датчики группировки звеньев тела закреплены на корпусе фигуриста в области требуемого положения звеньев тела и подключены к блоку звуковой индикации. Устройство имеет блок измерения и индикации длительностей удержания группировок звеньев тела, блок замыкания датчиков группировки, блок расчета разностей длительностей удержания группировок и датчик контакта конька со льдом. 10 з.п. ф-лы, 11 ил.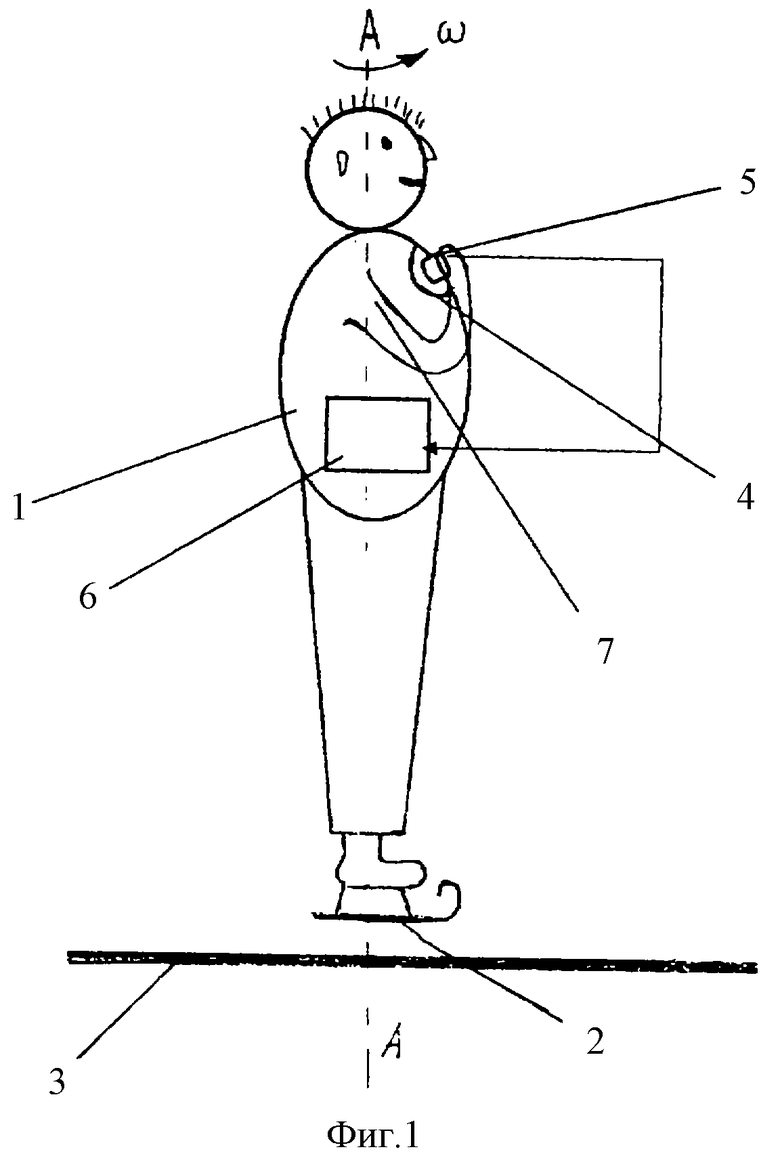
| US 6464622 В2, 15.10.2002 | |||
| Преобразователь переменного напряжения в постоянное | 1985 |
|
SU1325644A1 |
| Устройство для контроля выполнения упражнений в фигурном катании на коньках | 1977 |
|
SU628936A1 |
| US 3959640 A, 25.05.1976. | |||

